51单片机串-并转换实验
51单片机实验指导书
目录目录 0第一章实验装置 (1)一.伟福开发环境的使用 (1)二.LJD-SY-5100学习实验开发板的使用 (17)第二章微机原理及应用实验 (22)实验一开发环境的使用 (22)实验二数据传送 (23)实验三数码转换 (23)实验四数值运算 (24)实验五堆栈操作 (25)实验六查表操作 (25)实验七逻辑运算操作 (26)实验八中断及I/O口实验 (26)实验九串行通讯实验 (28)第一章实验装置一.伟福开发环境的使用1.菜单文件菜单选项●文件 | 打开文件打开用户程序,进行编辑。
如果文件已经在项目中,可以在项目窗口中双击相应文件名打开文件。
●文件 | 保存文件保存用户程序。
用户在修改程序后,如果进行编译,则在编译前,系统会自动将修改过的文件存盘。
●文件 | 新建文件建立一个新的用户程序,在存盘的时候,系统会要求用户输入文件名。
●文件 | 另存为将用户程序存成另外一个文件,原来的文件内容不会改变。
●文件 | 重新打开在重新打开的下拉菜单中有最近打开过的文件及项目,选择相应的文件名或项目名就可以重新打开文件或项目。
●文件 | 打开项目打开一个用户项目,在项目中,用户可以设置仿真类型。
加入用户程序,进行编译,调试。
系统中只允许打开一个项目,打开一个项目或新建一个项目时,前一项目将自动关闭。
伟福开发环境的项目文件包括仿真器设置,模块文件,包含文件。
仿真器设置包括仿真器类型,仿真头(POD)类型,CPU类型,显示格式和产生的目标文件类型,可以用以下几种方法设置仿真器。
✧在项目窗口中双击第一行,将打开仿真器设置窗口,对仿真器进行设置。
✧按鼠标右键,在弹出菜单中选择[仿真器设置]。
✧主菜单| 仿真器| 仿真器设置。
加入模块文件✧按鼠标右键,在弹出菜单中选择[加入模块文件]。
✧主菜单| 项目| 加入模块文件。
加入包含文件✧按鼠标右键,在弹出菜单中选择[加入包含文件]。
✧主菜单| 项目| 加入包含文件。
51单片机ad转换代码及仿真

51单片机ad转换代码及仿真一、前言51单片机是一种广泛应用于嵌入式系统领域的微控制器,其具有低功耗、高性能、易学易用等特点。
其中,AD转换模块是其重要的功能之一,可以实现模拟信号到数字信号的转换。
本文将介绍51单片机AD 转换的相关知识和代码实现,并通过仿真验证其正确性。
二、51单片机AD转换原理1. AD转换概述AD转换(Analog-to-Digital Conversion)是指将模拟信号(如声音、图像等)转化为数字信号的过程。
在嵌入式系统中,AD转换通常用于采集外部传感器等模拟量信号,并将其转化为数字量进行处理。
2. 51单片机AD转换模块51单片机内置了一个8位AD转换模块,可以对0~5V范围内的模拟信号进行采样和转换。
该模块包含以下主要部分:(1)输入端:可接受外部0~5V范围内的模拟信号。
(2)采样保持电路:在采样期间对输入信号进行保持,以避免采样过程中信号波动。
(3)比较器:将输入信号与参考电压进行比较,并输出比较结果。
(4)计数器:对比较结果进行计数,得到AD转换的结果。
(5)控制逻辑:控制采样、保持、比较和计数等过程。
3. AD转换精度AD转换精度是指数字信号与模拟信号之间的误差,通常用位数来表示。
例如,8位AD转换器可以将模拟信号分成256个等级,即精度为1/256。
因此,AD转换精度越高,数字信号与模拟信号之间的误差越小。
4. AD转换速率AD转换速率是指单位时间内进行的AD转换次数。
在51单片机中,AD转换速率受到时钟频率和采样时间的限制。
因此,在实际应用中需要根据具体情况选择合适的时钟频率和采样时间以满足要求的转换速率。
三、51单片机AD转换代码实现以下为51单片机AD转换代码实现:```#include <reg52.h>sbit IN = P1^0; // 定义输入端口sbit OUT = P2^0; // 定义输出端口void main(){unsigned char result;while (1){ADC_CONTR = 0x90; // 打开ADCADC_CONTR |= 0x08; // 开始采样while (!(ADC_CONTR & 0x10)); // 等待采样完成result = ADC_RES; // 读取结果OUT = result; // 输出结果}}```代码解释:(1)定义输入输出端口:使用sbit关键字定义输入端口和输出端口。
串行模数数模转换实验报告
串行模数/数模转换实验报告一.实验目的:1、掌握 TLC549同步串行接口的ADC模块的特性、编程原理,了解TLC5620的4种时序图以及产生波形幅度的计算方法。
2、能实现TLC549、TLC5620与MCS-51单片机的连接,分别进行数据采集和波形观测。
3、能采用Proteus ISIS软件进行串行模数转换的电路设计。
4、能运用MCS-51单片机汇编语言进行串行模数/数模转换实验的软件设计。
二.实验要求:1、将TLC549 与MCS-51单片机进行连接,利用汇编语言编写出数据采集程序,将转换的模拟电压以二进制的形式通过单片机的P0口输出显示。
1)将单片机的P0口与LED1~LED8连接起来,作为输出显示。
由于LED采用灌电流方式驱动,所以要将数据取反后再输出显示,以获得“正逻辑”效果2)利用P1口与TLC549的控制信号进行连接,TLC549的基准电压REF+端与基准电压+5V相连,将电位器的上端连接VCC、下端连接GND,抽头与TLC549的模拟输入ANIN连接。
在运行程序时,不断地调节电位器,使其抽头电压连续变化,通过LED1~LED8的状态观察ADC转换的结果。
3)运用Proteus ISIS软件完成串行模数转换实验的硬件电路设计。
4)实现KeilC与Proteus软件的联调。
2、设计软件程序,用单片机的I/O口控制TLC5620实现D/A转换,使其通道1产生一个三角波,而通道2产生一个和通道1周期、幅度均相同的方波。
1)短接B7区的电源供给跳线JP16,调节B7区的电位器W3,使其输出接线柱Verf的电压为2.6V。
2)将A2区P16、P17、T0、T1分别连接到B9区的CLK、DAT、LDAC、LOAD,将B7区Verf连接到B9区REF接线柱,短接B9区电源跳线JP13。
3)运行光盘中的相应程序,用双踪示波器的两个探头观察DACA、DACB输出的波形。
三.流水灯硬件电路图四.软件程序1. 串行模数实验程序流程图2.程序清单 1) 串行模数:SDO BIT P1.0 ;数据输出CS BIT P1.1 ;片选SCLK BIT P1.2 ;时钟ORG 8000HAJMP MAINORG 8100HMAIN: MOV SP,#60HLOOP: ACALL TLC549_ADCCPL A ;累加器A取反MOV P0,A ;数据给P0口ACALL DELAYSJMP MAINTLC549_ADC: PUSH 07HCLR A ;清零CLR SCLKMOV R6,#08H ;计数器赋初值CLR CS ;选中TLC549LOOP1:SETB SCLK ;SCLK置位,数据输出NOPNOPMOV C,SDORLC A ;累加器A循环左移CLR SCLK ;SDO=0,为读出下一位数据作准备 NOPDJNZ R6,LOOP1 ;R6-1→R6,判断R6=0SETB CS ;禁止TLC549,再次启动AD转换 SETB SCLKPOP 07HRETDELAY: PUSH 00HMOV R0,#00HDJNZ R0,$POP 00HRETEND2)串行数模:SCLA BIT P1.6SDAA BIT P1.7LOAD BIT P3.5LDAC BIT P3.4VOUTA DATA 30HVOUTB DATA 31HORG 8000HAJMP MAINORG 8100HMAIN:MOV SP,#60HNOPCLR SCLACLR SDAASETB LOADSETB LDACMOV R3,#0A2HMOV R4,#00HMOV VOUTA,#00HMOV R5,#0A2HMOV R6,#00HMOV VOUTB,#00HDACHANG:MOV R1,#01HMOV R2,VOUTALCALL DAC5620DJNZ R3,CONTINUEAMOV R3,#0A2HMOV A,R4CPL AMOV R4,ACONTINUEA:CJNE R4,#OFFH,CONTINUEB DEC R2SJMP CONTINUEC CONTINUEB:INC R2CONTINUEC:MOV VOUTA,R2MOV R1,#03HMOV R2,VOUTBLCALL DAC5620DJNC R5,CONTINUEDMOV R5,#042HMOV A,R6CPL AMOV R6,A CONTINUED:CJNE R6,#0FFH,CONTINUEE MOV R2,#OA2HSJMP CONTINUEF CONTINUEE:MOV R2,#00H CONTINUEF:MOV VOUTB,R2LJMP DACHANG DAC5620:MOV A,R1CLR SCLAMOV R7,#08HLCALL SENDBYTEMOV A,R2CLR SCLAMOV R7,#08HLCALL SENDBYTECLR LOADSETB LOADCLR LDACSETB LDACRETSENDBYTE:SETB SCLARLC AMOV SDAA,CCLR SCLADJNZ R7,SENDBYTE RETEND五.实验结果观察实验结果,可知道通过调节电位器,数字量在对应的发生改变。
51单片机进制转换程序
51单片机进制转换程序
本程序可以在51单片机上实现十进制、二进制、十六进制之间的相互转换。
以下是各个功能的详细说明:
1. 十进制到二进制:将输入的十进制数转换成二进制数,以字符串的形式输出。
2. 十进制到十六进制:将输入的十进制数转换成十六进制数,以字符串的形式输出。
3. 二进制到十进制:将输入的二进制数转换成十进制数,以整数的形式输出。
4. 十六进制到十进制:将输入的十六进制数转换成十进制数,以整数的形式输出。
5. 二进制到十六进制:将输入的二进制数转换成十六进制数,以字符串的形式输出。
6. 十六进制到二进制:将输入的十六进制数转换成二进制数,以字符串的形式输出。
程序流程图:
(1) 十进制到二进制:
输入:十进制数(整数)
输出:二进制数(字符串)
流程:将十进制数除以2,取余数,然后将商继续除以2,直到商为0,将所有余数逆序排列,得到二进制数。
(2) 十进制到十六进制:
输入:十进制数(整数)
输出:十六进制数(字符串)
流程:将十进制数除以16,取余数,然后将商继续除以16,直到商为0,将所有余数逆序排列,得到十六进制数。
(3) 二进制到十进制:
输入:二进制数(字符串)
输出:十进制数(整数)
流程:将二进制数从右向左遍历,每个数字乘以2的幂次方(0次方到n-1次方),其中n为二进制数的长度,然后将所有结果相加得到十进制数。
(4) 十六进制到十进制:
输入:十六进制数(字符串)
输出:十进制数(整数)
流程:将十六进制数从右向左遍历,每个数字乘以16的幂次方(0次方到n-1次方),其中n为十六进制数的长度,然后将所有结果相加得到十进制数。
51单片机实验2014

《单片机原理与应用实验》指导书厦门理工学院光电与通信工程学院目录目录 (I)第一章概述 (1)第二章实验系统组成和结构 (4)§2.1 系统主机的硬件组成 ................................................................ 错误!未定义书签。
2.1.1 逻辑电平开关电路...................................... 错误!未定义书签。
2.1.2 LED电平显示电路....................................... 错误!未定义书签。
2.1.3单脉冲电路........................................... 错误!未定义书签。
2.1.4 音频放大电路........................................... 错误!未定义书签。
2.1.5 继电器输出电路........................................ 错误!未定义书签。
2.1.6 逻辑门电路............................................. 错误!未定义书签。
2.1.7 逻辑测量(逻辑笔)电路................................. 错误!未定义书签。
2.1.8 4MHz脉冲信号源和多级分频电路......................... 错误!未定义书签。
2.1.9 可调模拟量输入电路..................................... 错误!未定义书签。
2.1.10 六位LED数码显示器................................... 错误!未定义书签。
2.1.11 4×6 键盘电路......................................... 错误!未定义书签。
单片机实训报告实训方案

一、实训目的1. 掌握单片机的基本原理和组成。
2. 熟悉51单片机的编程方法及开发工具。
3. 培养动手实践能力,提高问题分析和解决能力。
4. 理解单片机在实际应用中的地位和作用。
二、实训内容1. 单片机基本原理- 单片机的组成结构- CPU的工作原理- 存储器分类及功能- I/O接口电路2. 51单片机编程- C语言编程基础- 51单片机指令系统- 程序设计方法- 常用函数和中断系统3. 单片机开发工具- Keil uVision软件的使用- 串口调试助手的使用- 实验箱的连接与调试4. 实训项目- 项目一:LED流水灯- 实现功能:通过单片机控制LED灯的闪烁,形成流水灯效果。
- 实训目标:熟悉单片机基本编程方法,掌握LED灯的控制。
- 项目二:按键控制LED灯- 实现功能:通过按键控制LED灯的开关。
- 实训目标:掌握按键输入的处理方法,了解中断系统。
- 项目三:数字时钟- 实现功能:通过单片机实现数字时钟的功能,显示时分秒。
- 实训目标:掌握定时器的工作原理,了解时钟系统的设计。
- 项目四:温度传感器数据采集- 实现功能:通过温度传感器采集环境温度,并在LCD显示屏上显示。
- 实训目标:学习传感器应用,掌握A/D转换器的工作原理。
三、实训步骤1. 准备工作- 熟悉实训环境,了解实验设备。
- 安装Keil uVision软件,配置实验箱。
2. 理论学习- 学习单片机基本原理、编程方法和开发工具。
- 阅读相关教材和资料,掌握知识点。
3. 项目实施- 根据实训项目要求,进行程序设计。
- 利用Keil uVision软件进行编译、调试和烧录程序。
- 连接实验箱,进行实际操作。
4. 结果分析- 分析程序运行结果,发现问题并解决。
- 总结实训过程中的经验和教训。
5. 撰写报告- 按照实训报告模板,撰写实训报告。
四、实训要求1. 严格遵守实训纪律,按时完成实训任务。
2. 认真学习理论知识,熟练掌握编程方法和开发工具。
51单片机实验指导书
.51系列单片机原理与应用实验华南师范大学物理与工程工程学院微机教研室20010年9月目录实验须知 (2)实验一数字量输入输出实验 (4)实验二交通灯控制实验 (6)实验三定时与中断实验 (8)实验四串行通信实验 (11)实验五串行A/D转换实验 (13)实验六现实人体视觉暂留特性测试实验 (14)实验七实时时钟制作实验 (17)实验八简易电子琴制作实验 (18)实验九 EEPROM应用—数字密码锁 (20)实验十综合实验:教学板自检程序设计 (25)实验十一数据采集—火灾报警装置的软硬件设计 (26)附录一实验教学板 (27)附录二实验用软件使用说明 (28)实验须知一、预习要求1.实验前认真阅读实验指导书的相关内容,明确实验目的和实验任务。
2.实验前应做好预习报告,在报告中,要求画出所设计的实验电路原理图、程序流程图,编写好程序,并对程序加以注释,还要拟订好实验步骤。
二、实验要求1.按实验中心安排的时间到指定实验室上实验课,不要迟到、缺席。
有特殊原因不能在原安排时间来实验时,须提前一天通知实验中心负责教师。
2.认真完成每次实验的各项任务,实验结果要请指导教师检查。
教师对实验内容提问,并对完成者进行记录。
3.爱护设备,保持清洁,不得在实验室内大声喧哗,不要将食物带入实验室,不擅自更换设备。
4.在实验箱(板)通电状态下,不要用手随意触摸电路板上除按键和开关以外的芯片等其它元器件。
,严禁带电操作,即所有接线、改线和拆线操作均应在不带电的状态下进行。
5.实验中若发生异常情况应立即切断电源,并向指导教师报告,检查原因,避免再次发生类似情况。
6.实验完毕,请整理好实验设备后再离开实验室。
三、实验报告要求实验报告必须使用实验报告专用纸,书写要工整、清楚,并在下一次实验时交给指导教师。
实验报告应包括以下内容:1.实验名称、实验人姓名、学号、班级、同组人姓名。
2.实验目的、任务(内容)。
3.各任务程序流程图、自编程序清单,对程序须给出适量注释(例如:变量和某些寄存器的作用,关键程序段的功能等)。
51单片机串口通信实例
51单片机串口通信实例一、原理简介51 单片机内部有一个全双工串行接口。
什么叫全双工串口呢?一般来说,只能接受或只能发送的称为单工串行;既可接收又可发送,但不能同时进行的称为半双工;能同时接收和发送的串行口称为全双工串行口。
串行通信是指数据一位一位地按顺序传送的通信方式,其突出优点是只需一根传输线,可大大降低硬件成本,适合远距离通信。
其缺点是传输速度较低。
与之前一样,首先我们来了解单片机串口相关的寄存器。
SBUF 寄存器:它是两个在物理上独立的接收、发送缓冲器,可同时发送、接收数据,可通过指令对SBUF 的读写来区别是对接收缓冲器的操作还是对发送缓冲器的操作。
从而控制外部两条独立的收发信号线RXD(P3.0)、TXD(P3.1),同时发送、接收数据,实现全双工。
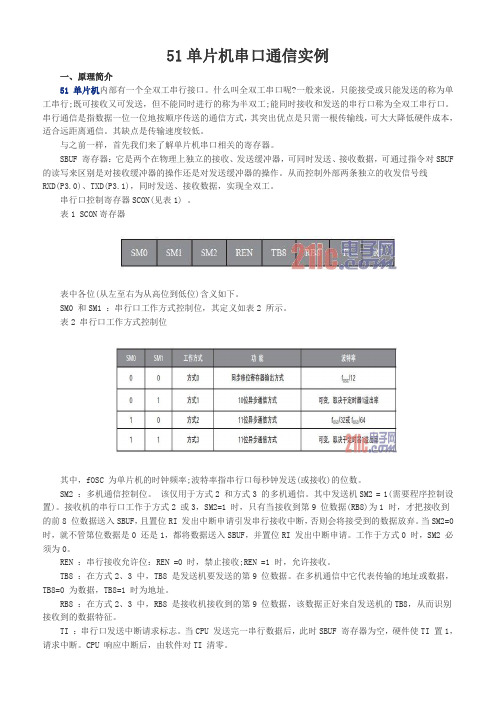
串行口控制寄存器SCON(见表1) 。
表1 SCON寄存器表中各位(从左至右为从高位到低位)含义如下。
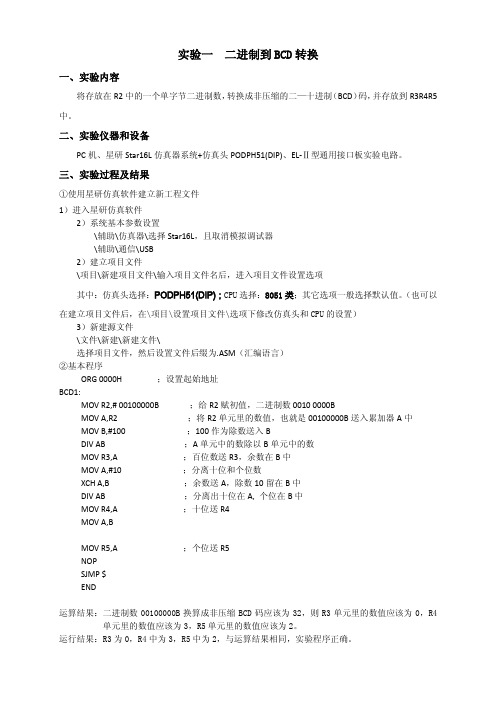
SM0 和SM1 :串行口工作方式控制位,其定义如表2 所示。
表2 串行口工作方式控制位其中,fOSC 为单片机的时钟频率;波特率指串行口每秒钟发送(或接收)的位数。
SM2 :多机通信控制位。
该仅用于方式2 和方式3 的多机通信。
其中发送机SM2 = 1(需要程序控制设置)。
接收机的串行口工作于方式2 或3,SM2=1 时,只有当接收到第9 位数据(RB8)为1 时,才把接收到的前8 位数据送入SBUF,且置位RI 发出中断申请引发串行接收中断,否则会将接受到的数据放弃。
当SM2=0 时,就不管第位数据是0 还是1,都将数据送入SBUF,并置位RI 发出中断申请。
工作于方式0 时,SM2 必须为0。
REN :串行接收允许位:REN =0 时,禁止接收;REN =1 时,允许接收。
TB8 :在方式2、3 中,TB8 是发送机要发送的第9 位数据。
在多机通信中它代表传输的地址或数据,TB8=0 为数据,TB8=1 时为地址。
RB8 :在方式2、3 中,RB8 是接收机接收到的第9 位数据,该数据正好来自发送机的TB8,从而识别接收到的数据特征。
51单片机实验-实验一 二进制到BCD转换
实验一二进制到BCD转换一、实验内容将存放在R2中的一个单字节二进制数,转换成非压缩的二—十进制(BCD)码,并存放到R3R4R5中。
二、实验仪器和设备PC机、星研Star16L仿真器系统+仿真头PODPH51(DIP)、EL-Ⅱ型通用接口板实验电路。
三、实验过程及结果①使用星研仿真软件建立新工程文件1)进入星研仿真软件2)系统基本参数设置\辅助\仿真器\选择Star16L,且取消模拟调试器\辅助\通信\USB2)建立项目文件\项目\新建项目文件\输入项目文件名后,进入项目文件设置选项其中:仿真头选择:PODPH51(DIP);CPU选择:8051类;其它选项一般选择默认值。
(也可以在建立项目文件后,在\项目\设置项目文件\选项下修改仿真头和CPU的设置)3)新建源文件\文件\新建\新建文件\选择项目文件,然后设置文件后缀为.ASM(汇编语言)②基本程序ORG 0000H ;设置起始地址BCD1:MOV R2,# 00100000B ;给R2赋初值,二进制数0010 0000BMOV A,R2 ;将R2单元里的数值,也就是00100000B送入累加器A中MOV B,#100 ;100作为除数送入BDIV AB ;A单元中的数除以B单元中的数MOV R3,A ;百位数送R3,余数在B中MOV A,#10 ;分离十位和个位数XCH A,B ;余数送A,除数10留在B中DIV AB ;分离出十位在A, 个位在B中MOV R4,A ;十位送R4MOV A,BMOV R5,A ;个位送R5NOPSJMP $END运算结果:二进制数00100000B换算成非压缩BCD码应该为32,则R3单元里的数值应该为0,R4单元里的数值应该为3,R5单元里的数值应该为2。
运行结果:R3为0,R4中为3,R5中为2,与运算结果相同,实验程序正确。
③将基本程序进行修改,添加子程序后验证ORG 0000H ;设置初始地址START:MOV R2,#00100000B ;给R2赋初值00100000BLCALL BCD ;调用子程序BCDSJMP $BCD: ;子程序BCDMOV A,R2 ;将R2单元里的数值,也就是00100000B送入累加器A中MOV B,#100 ;100作为除数送入BDIV AB ;A单元中的数除以B单元中的数MOV R3,A ;百位数送R3,余数在B中MOV A,#10 ;分离十位和个位数XCH A,B ;余数送A,除数10留在B中DIV AB ;分离出十位在A, 个位在B中MOV R4,A ;十位送R4MOV A,BMOV R5,A ;个位送R5RET ;返回主程序END运行结果:R3为0,R4中为3,R5中为2,与上面基本程序的运行结果相同,所以改编后的实验程序是正确的。
单片机实验报告
目录一、实验一 (1)二、实验二 (7)三、实验三 (11)四、实验四 (15)实验一定时/计数器验证实验一、实验目的熟悉定时/计数器T0的特点,学会合理选择定时方式并能根据具体情况结合软件的方式定时;二、实验设备及器件IBMPC机一台PROTEUS硬件仿真软件KeilC51;三、实验内容用AT89C51单片机的定时/计数器T0产生1s的定时时间,作为秒计数时间,当1s产生时秒计数加1;秒计数到60时,自动从0开始;四、实验要求要求采用Proteus软件实现上述实验;五、实验步骤1.打开ProteusISIS编辑环境,按照表1-1所列的元件清单添加元件;元件全部添加后,在ProteusISIS的编辑区域中按图1-1所示的原理图连接硬件电路;图1-1电路原理图2.根据参考程序绘出流程图,并辅以适当的说明;流程图如图1-2所示:图1-2程序流程图3.打开KeilμVision4,新建Keil项目,选择AT89C51单片机作为CPU,将参考程序导入到“SourceGroup1”中;在“OptionsforTarget”对话窗口中,选中“Output”选项卡中的“CreateHEXFile”选项和“Debug”选项卡中的“Use:ProteusVSMSimulator”选项;编译汇编源程序,改正程序中的错误;4.在ProteusISIS中,选中AT89C51并单击鼠标左键,打开“EditComponent”对话窗口,设置单片机晶振频率为12MHz,在此窗口中的“ProgramFile”栏中,选择先前用Keil生成的.HEX文件;在ProteusISIS的菜单栏中选择“File”→“SaveDesign”选项,保存设计,在ProteusISIS的菜单栏中,打开“Debug”下拉菜单,在菜单中选中“UseRemoteDebugMonitor”选项,以支持与Keil的联合调试;5.在Keil的菜单栏中选择“Debug”→“Start/StopDebugSession“选项,或者直接单击工具栏中的“Debug”→“Start/StopDebugSession”图标,进入程序调试环境;按“F5”键,顺序运行程序;调出“ProteusISIS”界面可以看到7段数码管显示从0~59s的计数值,每个数值显示1s,如图1-3所示;图1-3程序运行结果六、实验程序SECOND EQU 30HCOUNT EQU 31HORG 00HLJMP STARTORG 0BHLJMP INT_T0START: MOV SECOND,00HMOV COUNT,00HMOV DPTR,TABLECLR AMOV P0,AMOV P2,AMOV TMOD,00HMOV TH0,65536-50000/256MOV TL0,65536-50000MOD256SETB TR0SETB ET0SETB EAMOVIE,82HLJMP $INT_T0:MOV TH0,65536-50000/256MOV TL0,65536-50000MOD256INC COUNTMOV A,COUNTCJNE A,20,I2MOV COUNT,00HINC SECONDMOV A,SECONDCJNE A,60,I1MOV SECOND,00HI1: MOV A,SECONDMOV B,10HDIV ABMOVC A,A+DPTRMOV P0,AMOV A,BMOVC A,A+DPTRMOV P2,AI2: RETITABLE: DB 3FH,06H,5BH,4FH,66HDB 6DH,7DH,07H,7FH,6FHEND七、思考题1.罗列一下Proteus软件的能带给我们的好处,指出一点最能帮助你的地方;使用Proteus软件能使我们方便的搭建电路,同时在没有元器件的情况下进行便于仿真,方便我们在将程序写入单片机前确认运行是否正确,同时可在采购器件之前即可开始开发产品,而不必等到器件采购完后搭建电路才进行程序调试;2.用Proteus界面中的播放键运行仿真与KeilμVision4的环境中联调运行它们两者的区别在什么地方3.用Proteus界面中的播放键运行仿真仅可以观察运行结果,即程序运行在硬件表面上的表现;而联调的时候可以再Keil软件里查看各寄存器和存储器的状况,即硬件的内部情况;4.Keil软件软件仿真与Proteus的仿真对比;使用Proteus仿真可从硬件的角度观察仿真结果,使仿真结果更加形象直观,使我们可从硬件运行状态清楚的判断运行结果是否正确;而在Keil环境中则是从程序的角度通过观察程序中数据的变化来观察仿真结果,需要对程序运行结果充分了解;八、实验总结及相关问题通过本次实验了解了Ptoteus软件的使用方法,以及在掌握了Keil的使用方法下,学会了Proteus与Keil软件联调的方法;在用Proteus中由于忽略了要在总线处放置网络标号导致联调失败,最后通过观察发现数码管引脚电平无变化发现此问题,放置网络标号后运行仿真时数码管引脚电平发生变化可是数码管却没有变亮,经过多次检查接线,未发现接线错误后,觉得可能是软件本身错误,故将总线及数码管周围硬件线路重新绘制一遍后再次运行仿真及可得到图1-3的结果;实验二单片机I/O口控制实验一、实验目的利用单片机的P1口作IO口,使同学学会利用P1口作为输入和输出口;二、实验设备及器件IBMPC机一台DP-51PRO单片机仿真器、编程器、实验仪三合一综合开发平台一台三、实验内容1.编写一段程序,用P1口作为控制端口,使D1区的LED轮流亮;2.编写一段程序,用P1.0~P1.6口控制LED,P1.7控制LED的亮和灭P1.7接按键,按下时LED亮,不按时LED灭;四、实验要求学会使用单片机的P1口作IO口,如果有时间同学也可以利用P3口作IO口来做该实验;五、实验步骤1.用导线把A2区的J61接口与D1区的J52接口相连;原理如图2-1所示;图2-1实验二原理图2.先编写一个延时程序;延时程序见程序1子程序DELAY;3.将LED轮流亮的程序编写完整并使用TKStudyICE调试运行;LED轮流亮程序见程序1;调试运行结果:D1区LED轮流亮;4.使用导线把A2区的J61接口的P1.0~P1.6与D1区的J52接口的LED1~LED7相连,另外A2区J61接口的P1.7与D1区的J53的KEY1相连;5.编写P1.7控制LED的程序,并调试运行;按下K1看是否全亮;P1.7控制LED的程序见程序2;调试运行结果:按下P1.7后D1区LED全灭;6.A2区J61接口的P1.7与D1区的J54的SW1相连;然后再使用TKStudyICE运行程序,查看结果;P1.7控制LED的程序见程序2;调试运行结果:按下P1.7后D1区LED全亮;六、实验参考程序程序1:ORG 0000HLJMP MAINORG 0100HMAIN: MOV A,0FFHCLR CMAINLOOP:CALL DELAYRLC AMOV P1,ASJMP MAINLOOPDELAY: MOV R7,0LOOP: MOV R6,0DJNZ R6,$DJNZ R6,$DJNZ R6,$DJNZ R7,LOOPRETEND程序2:ORG 000HLJMP MAINORG 0100HMAIN: JB P1.7,SETLEDCLRLED:CLR P1.0CLR P1.1CLR P1.2CLR P1.3CLR P1.4CLR P1.5CLR P1.6SJMP MAINSETLED:SETB P1.0SETB P1.1SETB P1.2SETB P1.3SETB P1.4SETB P1.5SETB P1.6SJMP MAINEND七、实验思考题1.请同学思考一下,想出几个实现以上功能的编程方法;程序1可利用单片机的定时计数器通过选择定时计数器工作方式和预置初值设定延时时间,通过定时计数器产生的中断在中断程序中对A进行移位后输出至P1口;程序2可在判断P1.7高低电平后根据判断结果直接将80H或7F直接送P1口而不必逐位进行位操作;2.请同学再思考一下,第二个程序中如果使用KEY1作为外部中断控制LED的亮和灭时,程序应如何修改;此时将KEY1接/INT0口,在主程序中开启外部中断设置外部中断触发方式,通过中断服务子程序控制LED亮灭;程序如下所示:ORG 000HLJMP MAINORG 0003H ;中断服务程序LJMP SETLEDMAIN: MOV SP,40HSETB ET0 ;开外部中断CLR IT0 ;设置为电平触发SETB EACLRLED:CLR P1.0CLR P1.1CLR P1.2CLR P1.3CLR P1.4CLR P1.5CLR P1.6SJMP CLRLEDSETLED:SETB P1.0SETB P1.1SETB P1.2SETB P1.3SETB P1.4SETB P1.5SETB P1.6RETIEND八、实验总结及相关问题通过本次实验掌握了使用TKStudyICE进行硬件仿真调试的方法,在设置仿真器驱动程序声明时对C:\Keil目录下的Tools.ini文件添加描述时,由于添加的路径错误导致无法进行硬件仿真调试,修改为正确路径后方可在DEBUG窗口中的Use选项中找到对应的选项;使用TKStudyICE进行硬件仿真调试相比本学期的电子系统设计中用到的调试方法更快捷,使用更方便;与此同时,通过本次实验对单片机的I/O控制有了更深入的了接,同时加深入对单片机I/O编程的理解;实验三串转并I/O口实验一、实验目的熟悉并掌握串转并的I/O口扩展方法;二、实验设备及器件IBMPC机一台DP-51PRO单片机仿真器、编程器、实验仪三合一综合开发平台一台三、实验内容1.写程序,通过单片机的P1口控制74HC164的串行输入端口,实现串并转换;2.验证串并转换数据的正确性;四、实验要求熟悉串并转换芯片的工作原理,学会使用串并转换芯片扩展单片机的I/O口资源;表3-174HC164真值表五、实验步骤1.短接C5区JP10接口,将C5区J43接口与A2区J61接口的P10~P13对应相连CLK对P10等等;如图3-1所示;图3-1实验三原理图2.运行编写好的软件程序,完成一次串并转换;实验程序见实验参考程序;2.使用C2区的逻辑笔或D1区的J52接口LED指示灯测试并行输出数据Q0~Q7数据的正确性;调试运行结果:通过观察LED的亮灭情况可判断完成一次串并转换,且转换结果正确无误;六、实验参考程序CLK EQU P1.0DINA EQUP1.1DINB EQU P1.2CLR164 EQUP1.3ORG 0000HLJMP MAINORG 0100HMAIN: MOV SP,60HNOPCLR CLKSETB DINBCLR CLR164SETB CLR164MOV A,0FFHMOV R4,08HSLCHG: RLC AMOV DINA,CSETB CLKNOPCLR CLKNOPDJNZ R4,SLCHGSJMP$END七、实验思考题参考图3-2电路图,尝试编写软件程序,实现8位LED流水灯的控制;图3.2实验原理图可利用单片机的定时计数器通过选择定时计数器工作方式和预置初值设定延时时间,通过定时计数器产生的中断在中断程序中对A进行移位;程序如下所示:CLK EQU P1.0DINA EQUP1.1DINB EQU P1.2CLR164 EQUP1.3ORG 0000HLJMP MAINORG 000BH ;定时器0中断服务程序LJMP SLCHGMAIN: MOV SP,60HNOPCLR CLKSETB DINBCLR CLR164SETB CLR164MOV A,0FFHMOV TMOD,01H ;定时器0工作方式1MOV TH0,18H ;送2ms时间常数MOV TL0,0FCHSETB TR0 ;开中断SETB ET0SETB EASJMP $SLCHG: MOV TH0,18HMOV TL0,0FCHRLC AMOV DINA,CSETB CLKNOPCLR CLKRETIEND八、实验总结及相关问题由于具有之前实验的基础所以本实验基本没碰到什么问题,调试运行都符合实验要求,通过本次实验对串并转化程序的编写有了一定了解,通过编写流水灯程序加深了对单片机串并口的了解;实验四继电器控制实验一、实验目的加深理解继电器的工作原理和特点,掌握利用单片机的IO口控制继电器的一般方法;二、实验设备及器件IBMPC机一台DP-51PRO单片机仿真器、编程器、实验仪三合一综合开发平台一台三、实验内容1.利用D1区的拨动开关和LED,学习继电器的工作原理和特点;2.编写一段程序,用P1.0口控制继电器,继电器控制LED的亮和灭,COM与CLOSE连通时,一盏LED亮;不连通时该LED灭;COM与OPEN连通时,另一盏LED亮,不通时该LED灭;四、实验要求学会继电器的使用和利用单片机的IO口控制继电器的方法;五、实验步骤图4-1继电器驱动控制电路图1.用短路帽短接JP7,使用导线把D1区J54接口的SW1与C7区J9接口的KJ任意一根针相连接;2.使用导线把D1区J52接口的LED1、LED2与C7区J103接口的OPEN1,CLOSE1分别相连,另外C7区J103接口的COM1接地GND;3.接好线后,同学可以拨动D1区的SW1拨动开关,观察现象拨到1时LED2亮,拨到0时LED1亮,并得出结论;运行结果:拨到1时LED2亮,拨到0时LED1亮,说明每拨动一次开关改变一次继电器的状态;4.然后把C7区J9接口的KJ改接到A2区的J61接口的P10;再编写一个程序程序参考实验二,使P1.0口延时一段时间后改变电平值,来控制继电器的开关;实验程序见实验参考程序;调试运行结果:两个LED交替变亮,继电器状态不断改变;六、实验参考程序ORG 0000HLJMP MAINORG 0100HMAIN: MOV R7,0LOOP: MOV R6,0DJNZ R6,$DJNZ R6,$DJNZ R6,$DJNZ R7,LOOPCPL P1.0SJMP MAINEND七、实验思考题1.请同学思考一下,改由OPEN2、COM2、CLOSE2时本实验如何进行;同使用OPEN1、COM1和CLOSE1时连接方法类似,把D1区J52接口的LED1、LED2与C7区J103接口的OPEN2,CLOSE2分别相连,另外C7区J103接口的COM2接地GND即可;2.请同学再思考一下,继电器的用途,并举例说明;继电器是一种电控制,是当输入量激励量的变化达到规定要求时,在电气输出电路中使被控量发生预定的阶跃变化的一种电器;它具有又称输入回路和被控制系统又称输出回路之间的互动关系;通常应用于自动化的控制中,它实际上是用小电流去控制大电流运作的一种“自动开关”;故在电路中起着自动调节、安全保护、转换电路等作用;按照其工作原理可有以下应用:电磁继电器固体继电器温度继电器舌簧继电器时间继电器高频继电器极化继电器其他类型的继电器八、实验总结及相关问题由于具有之前实验的基础所以本实验基本没碰到什么问题,调试运行都符合实验要求,通过本次实验了解了继电器的控制方法;对继电器这一器件有了一定了解;。
Proteus仿真--51单片机串口转RS232
Proteus仿真——51单片机串口转RS232口单片机串口是单片机通信的基本途径,可以进行多单片机间的通信,也可以通过接口转换实现与计算机间的通信。
其中与计算机通信可以通过计算机的串口(232口)或USB口实现。
本文是本人做的一个小实验,内容是在Proteus ISIS中仿真51单片机串口转RS232口,实现单片机通过串行口与计算机通信。
单片机串行口有四种不同的工作方式:方式0:移位寄存器输入/出方式,波特率固定为:fosc/12。
方式1:10位UART(通用异步接口电路),一帧数据包括1位起始位(0),8位数据位和1位停止位(1)。
波特率可变,公式为:其中X为定时器T1的初值,当然我们一般都是先确定波特率然后算初值的,所以我们更想知道X等于多少。
把上面的式子变一下就可以得到初值X了:方式2/3:这两种方式都是11位的UART,它们比方式1多了一个第9位数据。
他们不同的是:方式2波特率固定为fosc/32或fosc/64,由SMOD位决定。
方式3:波特率同方式1;本例中采用方式1,波特率为9600(计算机默认值),根据波特率算出初值X=253(定时器T1工作方式2)。
我们以9600的波特率向计算机循环发送00H;proteus中的接口转换电路如下:计算机端用串口调试软件接收;不过我们要说明一下,为了实现串口的连接,我们要用计算机串口模拟软件模拟出两个232口,模拟出的这两个232口是设计为连接着的。
我们用Virtual Serial Port Driver这个软件(到网上去搜,很容易找到)。
安装好后打开,界面如下:在上图里可以看出我的机器有一个物理口COM1,现在已经模拟出了两个口COM2和COM3,而且他们是一组是连接着的。
我们在proteus中的compim默认是连到com1的,在我们这边改成com2,然后在串口调试软件中测试com3,如下两个图现在硬件连接已经到位,下面就是软件了:通过串口以波特率为9600的速度发送00H,程序如下:ORG 0000HLJMP STARTORG 0030HSTART: SETB EASETB ESSETB ET1CLR SM0;串行口工作于方式1:sm0=0,sm1=1SETB SM1MOV PCON,#00H;波特率不加倍MOV TMOD,#20H;T1定时器方式2MOV TL1,#253MOV TH1,#253SETB TR1MOV A,#00HLOOP: MOV SBUF,AJNB TI,$;等待发送完CLR TI;清除中断标志LJMP LOOP;循环END结果如下:说明一下:发送00H,收到FFH是因为电平转换电路MAX232对数据进行了取反。
51单片机常见汇编程序实验代码

51单片机常见汇编程序实验代码1. 将片外8000H-80FFH单元写入数据AB 32. 将片内RAM20H单元中数据在数码管上显示出来 (3)3. 将片内ARM30H-40H单元清零 54. 将六位数显示在数码管上 55. 8255并口芯片的应用:交通灯控制系统的设计 (6)6. 将交通灯点亮 (7)7. AD转换实验 (8)8. DA转换实验 (10)9. 定时器的应用 ·· 1110. 开关控制LED的亮灭及速度 1211. 计数器实验 (12)12. 串并转换实验 · 1413. 直流电机速度检测1514. 8255PB外接8个开关,编程将开关状态显示在数码管上(串并转换动态扫描方式)17 15. P3.4接开关K,编程将开关拨动次数,通过串并转换的方式进行显示1816. 比较片内RAM30H、31H两个单元值的大小,将较大的数显示在数码管上1917. 单片机P1口接8个开关,编程将开关状态显示在数码管上(串并转换动态扫描方式) (21)18. 将片内50H单元的值显示在数码管上2219. 开关K1接P1.0,K2接P1.1,编程实现当按下K1时在数码管上显示50H单元的值,按下K2在数码管上显示51H单元的值231. 将片外8000H-80FFH单元写入数据ABORG 0000H ;程序从0000H开始执行AJMP MAIN ;跳转到主程序ORG 0030H ;以免覆盖中断MAIN: MOV SP,#60H; 避免堆栈和工作寄存器区冲突MOV DPTR,#8000HMOV R0,#0LOOP: MOV A,#0ABHMOVX @DPTR,AINC DPTRINC R0CJNE R0,#0,LOOP ; 判断AJMP $; 等待END ;调试-视图-M存储器(输入X:8000H)2. 将片内RAM20H单元中数据在数码管上显示出来ORG 0000H ;程序从0000H开始执行AJMP MAIN ;跳转到主程序ORG 0030H ;以免覆盖中断MAIN: MOV SP,#60H ;避免堆栈和工作寄存器区冲突MOV DPTR,#0E100H ;指向命令口MOV A,#03H ;PA、PB口输出MOVX @DPTR,A ;所有并口显示程序先进行8155初始化MOV 20H,#34HMOV A,20HACALL CHAILOOP: MOV R0,#10H ;第一个显示数的送R0MOV R1,#2 ;显示2个数MOV R2,#1 ;从倒数第一个数码管开始显示ACALL DISPLAYLJMP LOOP ;判断CHAI: MOV B,#10HDIV ABMOV 10H,BMOV 11H,ARETDISPLAY: MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND3. 将片内ARM30H-40H单元清零ORG 0000H ;程序从0000H开始执行AJMP MAIN ;跳转到主程序ORG 0030H ;以免覆盖中断MAIN: MOV SP,#60H ;避免堆栈和工作寄存器区冲突MOV R0,#30HMOV A,#0LOOP: MOV @R0,AINC R0CJNE R0,#41H,LOOP ;判断AJMP $ ;等待END ;D:30H4. 将六位数显示在数码管上ORG 0000H ;程序从0000H开始执行AJMP MAIN ;跳转到主程序ORG 0030H ;以免覆盖中断MAIN: MOV SP,#60H ;避免堆栈和工作寄存器区冲突MOV DPTR,#0E100H ;指向命令口MOV A,#03H ;PA、PB口输出MOVX @DPTR,A ;所有并口显示程序先进行8155初始化LOOP: MOV R0,#10H ;第一个显示数的送R0MOV 10H,#0HMOV 11H,#3HMOV 12H,#1HMOV 13H,#2HMOV 14H,#1HMOV 15H,#1HMOV R1,#6 ;显示6个数MOV R2,#1 ;从倒数第一个数码管开始显示ACALL DISPLAYLJMP LOOPDISPLAY: MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND5. 8255并口芯片的应用:交通灯控制系统的设计ORG 0000HAJMP STARTORG 0030HSTART: MOV DPTR,#0AC03HMOV A,#80HMOVX @DPTR,A //8155初始化(所有并口显示中都要先8155初始化)MOV R5,#0F0HACALL DENGMOV R1,#20ACALL DELAYMOV R0,#1LOOP01: MOV R5,#5AHACALL DENGMOV R1,#100ACALL DELAYDJNZ R0,LOOP01MOV R0,#3 // LED_2闪烁次数LOOP02: MOV R5, #0FAHACALL DENGMOV R1,#10ACALL DELAYMOV R5,#50HACALL DENGMOV R1,#10ACALL DELAYDJNZ R0,LOOP02MOV R5,#0A5HACALL DENGMOV R1,#100ACALL DELAYMOV R0,#3LOOP03: MOV R5, #0F5HACALL DENGMOV R1,#10ACALL DELAYMOV R5,#0A0HACALL DENGMOV R1,#10ACALL DELAYDJNZ R0,LOOP03AJMP LOOP01DENG: MOV DPTR,#0AC00H //8155 PA口输出MOV A,R5MOVX @DPTR,A //8155 PA口送出显示参数RET //100ms延时子程序DELAY: MOV R7,#200DEL: MOV R6,#229DJNZ R6,$DJNZ R7,DELDJNZ R1,DELAYRETEND6. 将交通灯点亮ORG 0000HAJMP STARTORG 0030HSTART: MOV DPTR,#0AC03HMOV A,#80HMOV DPTR,#0AC00HMOV A,#05AHMOVX @DPTR,AAJMP $END7. AD转换实验ORG 0000AJMP STARTORG 000BHAJMP INT_0ORG 0030H START: MOV SP,#60HMOV TMOD,#01HMOV TH0,#4BHMOV TL0,#0FDHMOV R4,#2SETB EASETB ET0SETB TR0MOV DPTR,#0E100HMOV A,#3MOVX @DPTR,AMOV 22H,#9MOV 23H,#0MOV 24H,#8MOV 25H,#0 LOOP: MOV R0,#20HMOV R1,#6MOV R2,#1ACALL DISPLAYSJMP LOOPINT_0: MOV TH0,#4BHMOV TL0,#0FDHDJNZ R4,EXITPUSH ACCPUSH DPHPUSH DPLMOV DPTR,#0A000HMOVX A,@DPTRMOV B,#10HDIV ABMOV 21H,AMOVX @DPTR,AMOV R4,#2POP DPLPOP DPHPOP ACCEXIT: RETIDISPLAY: MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND8. DA转换实验ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV A,#0LOOP1: MOV DPTR,#0B000HMOVX @DPTR,AACALL XSACALL DELAYINC ACJNE A,#0FFH,LOOP1LOOP2: MOV DPTR,#0B000HMOVX @DPTR,AACALL XSACALL DELAYDEC ACJNE A,#0,LOOP2SJMP LOOP1XS: PUSH ACCMOV DPTR,#TABMOV B,#51DIV ABMOV R1,AXCH A,BMOV B,#5DIV ABMOVC A,@A+DPTRMOV R4,#8ACALL S164MOV A,R1MOVC A,@A+DPTRMOV R4,#8ACALL S164MOV A,#0CLR CMOV R4,#16ACALL S164POP ACCRETS164: RRC AMOV P1.0,CCLR P1.1SETB P1.1DJNZ R4,S164RETDELAY: MOV R7,#200DEl: MOV R6,#229DJNZ R6,$DJNZ R7,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND9. 定时器的应用ORG 0000HAJMP STARTORG 00BHAJMP INT_0ORG 0030HSTART: MOV TMOD,#01HMOV TH0,#4BHMOV TL0,#0FDHMOV R0,#20MOV R1,#0SETB ET0SETB TR0SETB EAAJMP $INT_0: MOV TH0,#4BHMOV TL0,#0FDHDJNZ R0,EXITMOV R0,#20MOV A,R1MOV DPTR,#TABMOVC A,@A+DPTRMOV P1,AINC R1CJNE R1,#8,EXITMOV R1,#0EXIT: RETITAB: DB 0FFH,0FAH,0F5H,0AFH,05FH,0AAH,55H,0H,0FFH END10. 开关控制LED的亮灭及速度ORG 0000H ;程序从0000H开始执行AJMP START ;跳转到主程序ORG 0030H ;以免覆盖中断START: MOV R4,#1 ;立即数传送到累加器LOOP: CLR P3.3 ;进位标志位清零LOOP1: JNB P3.5,LOOP ;直接寻址位为0则转移JB P3.4,LOOP2 ;直接寻址位为1则转移JNB P3.4,$INC R4 ;寄存器增1LOOP2: CPL P3.3 ;累加器求反MOV A,R4 ;寄存器内容传送到累加器AMOV R5,A ;累加器内容传送到累加器ACALL DELAY ;调用延时函数AJMP LOOP1 ;循环DELAY: MOV R6,#200DEL: MOV R7,#229DJNZ R7,$DJNZ R6,DEL ;寄存器减1,不为0则转移DJNZ R5,DELAYRET ;子程序返回END11. 计数器实验ORG 0000SJMP STARTORG 001BHLJMP INT_1START: MOV SP,#60HMOV R5,#20MOV TMOD,#15HMOV TH1,#4BHMOV TL1,#0FDHMOV TH0,#0MOV TL0,#0SETB ET1SETB EASETB TR1SETB TR0MOV DPTR,#0E100HMOV A,#3MOVX @DPTR,ALOOP: MOV R0,#50H;MOV R1,#4LCALL DISPLAYSJMP LOOPINT_1: MOV TH1,#4BHMOV TL1,#0FDHDJNZ R5,CONMOV R5,#20PUSH ACCPUSH BMOV A,TL0MOV B,#10HDIV ABMOV 50H,BMOV 51H,AMOV A,TH0MOV B,#10HDIV ABMOV 52H,BMOV 53H,AMOV TH0,#0MOV TL0,#0POP BPOP ACCCON: RETIDISPLAY: MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTR P164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,ADJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND12. 串并转换实验ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV R1,#0MOV DPTR,#TABLOOP: MOV A,#0CLR CMOV R4,#24ACALL S164MOV A,R1MOVC A,@A+DPTRMOV R4,#8ACALL S164INC R1MOV R5,#10ACALL DELAYCJNE R1,#10,EXITMOV R1,#0EXIT: SJMP LOOPS164: RRC AMOV P1.0,CCLR P1.1SETB P1.1DJNZ R4,S164RETDELAY: MOV R6,#200DEL: MOV R7,#230DJNZ R7,$DJNZ R6,DELDJNZ R5,DELAYRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H, 0FEH,0F6H END13. 直流电机速度检测ORG 0000HAJMP MAINORG 001BHAJMP INT_1ORG 0030HMAIN: MOV SP,#60HMOV TMOD,#15HMOV TH1,#4BHMOV TL1,#0FDHMOV R0,#20MOV TH0,#0MOV TL0,#0SETB ET1SETB EASETB TR0SETB TR1MOV R2,#00HUP: MOV A,R2MOV DPTR,#0A000H //注意片选接YC2,非YC3MOVX @DPTR,AMOV R5,#1ACALL DELAY ;100msINC R2CJNE R2,#0FFH,UPDOWN:MOV A,R2MOV DPTR,#0A000HMOVX @DPTR,AMOV R5,#1ACALL DELAY ;100msDEC R2CJNE R2,#00H,DOWNAJMP UPINT_1: MOV TH1,#4BHMOV TL1,#0FDHDJNZ R0,EXITMOV R0,#20PUSH ACCPUSH DPHPUSH DPLMOV A,TL0ACALL XSMOV TL0,#0MOV A,TH0ACALL XSMOV TH0,#0POP DPLPOP DPHPOP ACCEXIT: RETIXS: MOV DPTR,#TAB;MOV A,R2MOV B,#10 ;显示10进制数DIV ABXCH A,B;MOV DPTR,#TABMOVC A,@A+DPTRACALL FSXCH A,B;MOV DPTR,#TABMOVC A,@A+DPTRACALL FSRETFS: MOV R1,#8YW:RRC AMOV P1.0,CCLR P1.1SETB P1.1DJNZ R1,YWRETDELAY:MOV R6,#200DEL:MOV R7,#230DJNZ R7,$DJNZ R6,DELDJNZ R5,DELAYRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND14. 8255PB外接8个开关,编程将开关状态显示在数码管上(串并转换动态扫描方式)ORG 0000AJMP STARTORG 0030HSTART: MOV DPTR,#0AC03HMOV A, #82HMOVX @DPTR, AMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,ALOOP: MOV DPTR,#0AC01HMOVX A,@DPTRMOV B,#10HDIV ABMOV 10H,BMOV 11H,AMOV R0,#10HMOV R1,#2MOV R2,#1ACALL DISPLAYSJMP LOOPDISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,ADJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND15. P3.4接开关K,编程将开关拨动次数,通过串并转换的方式进行显示ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV R5,#0LOOP: JB P3.4,$ACALL DELAYJB P3.4,LOOPINC R5ACALL XSLOOP1: JNB P3.4,$ACALL DELAYJNB P3.4,LOOP1INC R5ACALL XSSJMP LOOPDELAY: MOV R7,#200DEL: MOV R6,#229DJNZ R6,$DJNZ R7,DELRETXS: MOV DPTR,#TABMOV A,R5MOV B,#10HMOV R1,AMOV A,BMOVC A,@A+DPTRMOV R4,#8ACALL S164MOV A,R1MOVC A,@A+DPTRMOV R4,#8ACALL S164MOV A,#0CLR CMOV R4,#16ACALL S164RETS164: RRC AMOV P1.0,CCLR P1.1SETB P1.1DJNZ R4,S164RETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND16. 比较片内RAM30H、31H两个单元值的大小,将较大的数显示在数码管上ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,AMOV 30H,#06H ;随便赋两个值,显示较大的MOV 31H,#11HMOV A,30HSUBB A,31HJC SMALLMOV B,#10HMOV A,30HDIV ABMOV 30H,BMOV 31H,ABIG: MOV R0,#30HMOV R1,#2MOV R2,#1ACALL DISPLAYSJMP BIG SMALL: MOV B,#10HMOV A,31HDIV ABMOV 30H,BMOV 31H,ASMALL1:MOV R0,#30HMOV R1,#2MOV R2,#1ACALL DISPLAYSJMP SMALL1 DISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTR P164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND17. 单片机P1口接8个开关,编程将开关状态显示在数码管上(串并转换动态扫描方式)ORG 0000HSJMP STARTORG 0030HSTART: MOV SP,#60HMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,ALOOP: MOV A,P1MOV B,#10HDIV ABMOV 20H,BMOV 21H,AMOV R0,#20HMOV R1,#2MOV R2,#1ACALL DISPLAYAJMP LOOPDISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND18. 将片内50H单元的值显示在数码管上ORG 0000HSJMP STARTORG 0030HSTART: MOV SP,#60HMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,ALOOP: MOV A,P1MOV B,#10HDIV ABMOV 20H,BMOV 21H,AMOV R0,#20HMOV R1,#2MOV R2,#1ACALL DISPLAYAJMP LOOPDISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND19. 开关K1接P1.0,K2接P1.1,编程实现当按下K1时在数码管上显示50H单元的值,按下K2在数码管上显示51H单元的值ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,AMOV 50H,#18H ;50H,51H 随便赋两个值MOV 51H,#22HLOOP:JB P1.0,D50JB P1.1,D51SJMP LOOPD51: MOV R0,#10HMOV R1,#2MOV R2,#1MOV A,51HMOV B,#10HDIV ABMOV 10H,BMOV 11H,AACALL DISPLAYSJMP LOOPD50: MOV R0,#10HMOV R1,#2MOV R2,#1MOV A,50HMOV B,#10HDIV ABMOV 10H,BMOV 11H,AACALL DISPLAYSJMP LOOPDISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164:MOV DPTR,#TABMOVC A,@A+DPTRP164_1:RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT:MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY:MOV R6,#4DEL:MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND。
51单片机16进制转10进制算法

51单片机16进制转10进制算法下面是一个将16进制转换成10进制的算法的具体步骤:步骤1:获取16进制数据首先,需要获取16进制数据。
在51单片机中,可以通过串口、外设等方式获取16进制数据。
这个数据通常是一个字符串形式的16进制数值。
步骤2:拆分数据将获取的16进制数据进行拆分。
将每位16进制字符分离出来,以便进行后续的计算。
例如,对于字符串"2A",可以将其拆分为"2"和"A"两个字符。
步骤3:转换字符为数字将拆分后的字符转换为对应的数字。
对于字符"0"~"9",可以直接将其转换为数字0~9;对于字符"A"~"F",需要将其转换为数字10~15、可以使用switch语句或者查表的方式进行转换。
步骤4:计算10进制值根据拆分并转换后的数字,计算出对应的10进制数值。
根据16进制的权值,将每位的数字乘以相应的权值,并求和得到最终的10进制值。
步骤5:输出结果将最终的10进制值输出。
可以通过串口、LED等方式将结果输出到外部设备。
这是一个简单的将16进制转换成10进制的算法,并且可以很容易地在51单片机上实现。
但需要注意的是,算法中需要考虑错误处理和异常情况,例如输入数据不合法或者超出范围等情况。
可以添加对这些情况的判断和处理,以提高算法的健壮性和可靠性。
实际上,在51单片机的开发环境中,一般会提供库函数或者API来实现16进制与10进制的转换。
这些库函数或API会更加高效和方便,推荐使用它们来进行16进制转换,而不是自己编写算法。
总结:本文介绍了在51单片机中如何实现将16进制转换成10进制的算法。
算法的步骤包括获取16进制数据、拆分数据、转换字符为数字、计算10进制值和输出结果。
在实际开发中,可以使用库函数或API来实现这个转换,以提高效率和方便性。
对于特殊情况,还需要添加错误处理和异常情况的判断和处理,以提高算法的健壮性和可靠性。
51单片机串口通信

51单片机串口通信串行口通信是一种在计算机和外部设备之间进行数据传输的通信方式,其中包括了并行通信、RS-232通信、USB通信等。
而在嵌入式系统中,最常见、最重要的通信方式就是单片机串口通信。
本文将详细介绍51单片机串口通信的原理、使用方法以及一些常见问题与解决方法。
一、串口通信的原理串口通信是以字节为单位进行数据传输的。
在串口通信中,数据传输分为两个方向:发送方向和接收方向。
发送方将待发送的数据通过串行转并行电路转换为一组相对应的并行信号,然后通过串口发送给接收方。
接收方在接收到并行信号后,通过串行转并行电路将数据转换为与发送方发送时相对应的数据。
在51单片机中,通过两个寄存器来实现串口通信功能:SBUF寄存器和SCON寄存器。
其中,SBUF寄存器用于存储要发送或接收的数据,而SCON寄存器用于配置串口通信的工作模式。
二、51单片机串口通信的使用方法1. 串口的初始化在使用51单片机进行串口通信之前,需要进行串口的初始化设置。
具体的步骤如下:a. 设置波特率:使用波特率发生器,通过设定计算器的初值和重装值来实现特定的波特率。
b. 串口工作模式选择:设置SCON寄存器,选择串行模式和波特率。
2. 发送数据发送数据的过程可以分为以下几个步骤:a. 将要发送的数据存储在SBUF寄存器中。
b. 等待发送完成,即判断TI(发送中断标志位)是否为1,如果为1,则表示发送完成。
c. 清除TI标志位。
3. 接收数据接收数据的过程可以分为以下几个步骤:a. 等待数据接收完成,即判断RI(接收中断标志位)是否为1,如果为1,则表示接收完成。
b. 将接收到的数据从SBUF寄存器中读取出来。
c. 清除RI标志位。
三、51单片机串口通信的常见问题与解决方法1. 波特率不匹配当发送方和接收方的波特率不一致时,会导致数据传输错误。
解决方法是在初始化时确保两端的波特率设置一致。
2. 数据丢失当发送方连续发送数据时,接收方可能会出现数据丢失的情况。
基于51单片机的网口串口转换模块设计

基于51单片机的网口串口转换模块设计随着计算机技术的高速发展,网络已经成为人们日常工作和生活中不可缺少的一部分。
在此基础上,各种网络设备和网络应用如雨后春笋般出现,成为我们日常工作和生活中不可或缺的工具。
因此本文将介绍一款基于51单片机的网口串口转换模块的设计原理及其应用。
一、设计原理1、硬件设计该网口串口转换模块的硬件设计主要是由51单片机单片机控制器、ENC28J60 网络控制器及 MAX2323 串口控制器组成。
其中51单片机作为控制芯片,控制ENC28J60 和 MAX2323的工作。
ENC28J60 网络控制器是一种专门用于网络通信的单片机控制芯片。
它可以通过网络端口直接连接互联网,可以实现TCP/IP 协议栈的功能。
ENC28J60 处理网络中传输的数据,然后将处理后的数据发送给 51 单片机处理或将 51 单片机需要发送的数据传输到网络中。
MAX2323 串口控制器是一款主控芯片,它在 rs-232 串口和TTL 串口之间起到转换的作用。
该芯片的内部电路结构包含了一组电荷泵电路,可以将 rs-232 的电平转换成 TTL 电平,以适应 51 单片机的与其他设备的串口通信。
2、软件设计1. 网络通信部分(1) 网络初始化:该模块初始化时需要设置IP地址、子网掩码、默认网关等网络参数;(2) TCP连接:TCP连接是和目标主机建立连接,以便发送数据。
服务器端必须打开相应的端口进行侦听,也就是绑定目标主机的IP地址和端口信息,等待客户端连接;(3) 传输数据:该部分主要是通过发送TCP数据包,将51单片机上产生的数据传送到网络中。
2.串口通信部分该部分主要是控制51单片机和外部设备之间的串口通信,比如串口数据传输的速率、数据位、停止位、奇偶校验等参数。
二、应用1、工控基于51单片机的网口串口转换模块可以应用于工控系统的远程监控、控制和通讯等方面。
通过这个模块,可以实现工控系统和互联网的连接,实现远程监控和控制。
51单片机原理及应用实验指导书
51单片机原理及应用实验指导书天津大学仁爱学院2010年10月实验须知一、预习要求1.实验前认真阅读实验教程中有关内容,明确实验目的和实验任务。
2.每次实验前应有预习报告,未预习者不允许参加实验。
3.预习报告中:对软件实验,要求画出程序流程图,编好上机程序。
二、实验要求1.实验是学习“汇编语言程序设计”这门课程的重要环节,实验课请勿迟到,缺席。
2.爱护设备,保持清洁,不随意更换设备。
3.认真完成实验任务,实验结果经教师检查,教师对实验内容提问,对完成者做记录。
4.做实验时,发生事故,应立即切断电源,并马上向教师报告,检查原因,吸取教训。
5.实验完毕,请整理实验设备,再离开实验室。
三、报告要求每次实验后,应递交一份实验报告,报告中应包括下列内容:1.实验名称、实验人姓名、学号、班级、所用的设备号。
2.实验目的、任务。
3.程序流程图、程序清单(应加适量注释)。
4.记录和分析实验结果。
5.根据实验目的认真做小结第一章51单片机实验系统简介1.1实验系统的特点EL-MUT-III 型单片机/微机教学实验系统具有开发、应用、实验相结合的高科技实验设备,系统具有以下特点:1、CPU可选用80C31、8086、中任一种CPU,系统功能齐全,涵盖了微机/单片机教学实验课程的大部分内容。
(本课程选用80C31 CPU)2、系统采用开放式模块化结构设计,通过两组相对独立的总线最多可同时扩展2块应用实验板,用户可根据需要购置相应实验板,降低了成本,提高了灵活性,便于升级换代。
3、配有两块可编程器件:EPM7128被系统占用。
另一块EPM7032供用户实验用。
两块器件皆可通过JTAG接口在线编程。
使用十分方便。
4、灵活的电源接口:配有PC机电源插座,可由PC提供电源。
另外还配有外接开关电源,提供所需的+5V,±12V,其输入为220V的交流电。
5、系统的联机运行模式:即配有系统调试软件,系统调试软件分DOS版和WINDOWS 版两种,均为中文多窗口界面。
51单片机实验心得体会5篇

51单片机实验心得体会5篇(经典版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的经典范文,如述职报告、演讲发言、汇报材料、对照材料、心得体会、策划方案、规章制度、教学资料、作文大全、其他范文等等,想了解不同范文格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!Moreover, our store provides various types of classic sample essays for everyone, such as job reports, speeches, presentation materials, reference materials, insights, planning plans, rules and regulations, teaching materials, complete essays, and other sample essays. If you want to learn about different sample formats and writing methods, please pay attention!51单片机实验心得体会5篇心得体会是内在世界的翻译,将情感的语言变为思考的文字,重视体会的写作,我们才能让自己的观点影响更多人,本店铺今天就为您带来了51单片机实验心得体会5篇,相信一定会对你有所帮助。
51单片机C语言实验及实践教程1
51单片机C语言实验及实践教程第一章:硬件资源模块第二章:keil c 软件使用at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅1.闪烁灯at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅2.模拟开关灯at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅3.多路开关状态指示at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅4.广告灯的左移右移at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅5.广告灯(利用取表方式)at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅6.报警产生器at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅7.I/O并行口直接驱动LED显示at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅8.按键识别方法之一at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅9.一键多功能按键识别技术at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅10.00-99计数器at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅11.00-59秒计时器(利用软件延时)at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅12.可预置可逆4位计数器at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅13.动态数码显示技术at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅14.4×4矩阵式键盘识别技术at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅15.定时计数器T0作定时应用技术(一)at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅16.定时计数器T0作定时应用技术(二)at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅17.99秒马表设计at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅18.“嘀、嘀、……”报警声at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅19.“叮咚”门铃at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅20.数字钟(★)at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅21.拉幕式数码显示技术at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅22.电子琴at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅23.模拟计算器数字输入及显示at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅24.8×8LED点阵显示技术at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅25.点阵LED“0-9”数字显示技术at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅26.点阵式LED简单图形显示技术at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅27.ADC0809 A/D转换器基本应用技术at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅28.数字电压表at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅29.两点间温度控制at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅30.四位数数字温度计at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅31.6位数显频率计数器at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅32.电子密码锁设计at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅33.4×4键盘及8位数码管显示构成的电子密码锁at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅34.带有存储器功能的数字温度计-DS1624技术应用at89s51单片机实验及实践课题┅┅┅┅┅┅┅┅┅┅┅35DS18B20数字温度计使用第一章AT89S51单片机实验及实践系统板简介AT89S51单片机实验及实践系统板(以后简介系统板)集成多个硬件资源模块,每个模块各自可以成为独立的单元,也可以相互组合,因此,可以为不同阶层的单片机爱好者及单片机开发者提供不同的开发环境。
51单片机综合实验报告
《单片机原理与接口技术》综合实验报告实验题目:基于单片机的电子日历、数字温度计、音乐播放器学院:电子信息学院专业:12 电子信息工程实验者:潘安乐学号: 1 2 2 8 4 0 1 0 1 0前言21世纪是信息时代,电子技术发展日新月异,在电子信息发展迅猛的年代,我们不仅要掌握8051系列单片机的C语言编程,而且要掌握好按键、LCD、USB 等程序的编写,要知道几乎每一样单片机系统都要与他们打交道的。
并且单片机作为一种经典的微控制器,其技术已经涉及到我们生活、工作、科研,各个领域,已经成为一种比较成熟的技术,作为电子专业的学生,我们学习了单片机,就要将其应用到自己的日常生活中来。
电子日历:在当代繁忙的工作与生活中,时间与我们每一个人都有非常密切的关系,每个人都受到时间的影响,随着社会、科技的发展,人类得知时间,从观太阳、摆钟到现在电子钟,不断研究、创新。
为了在观测时间的同时,能够了解其它与人类密切相关的信息,比如星期、日期等,于是电子万年历诞生了,它集时间、日期、星期等功能于一身,具有读取方便、显示直观、功能多样、电路简洁等诸多优点,符合电子仪器仪表的发展趋势。
对于数字电子万年历采用直观的数字显示,可以同时显示年、月、日、周日、时、分、秒等信息,还具有时间校准等功能。
数字温度计:在科学技术不断发展的今天,温度的检测.控制应用于许多行业,随着电子行业的发展,数字仪表反应快,操作简单,对环境要求不高的优点,市场上逐渐出现越来越多的数字式温度计。
实践表明,低功耗高精度的便携式数字式温度计使用方便,工作稳定,待机时间长,具有广阔的应用前景,本实验所采用的DS18B20可以很好的转换温度值,并且直接显示温度值,它的性能优于传统的感温元件并且省去了A\D、和模拟开关的设计。
数字音乐播放器:本文设计的数字音乐播放器是以单片机为核心元件的数字音乐播放器。
单片机具有体积小、功耗低、控制功能强、扩展灵活、微型化和使用方便等优点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.实验要求
利用8031串行口,和并行输出串行移位寄存器74LS164,扩展一位数码显示在数码显示器上循环显示0-9这10个数字。
二.实验目的
1.掌握8031串行口方式0工作方式及编程方法。
2.掌握利用串行口扩展I/O通道的方法。
三.实验电路及连线
RXD接DATAIN,TXD接DCLK。
四.实验说明
串行口工作在方式0时,可通过外接移位寄存器实现串并行转换。
在这种方式下,数据为8位,只能从RXD端输入输出,TXD端总是输出移位同步时钟信号,其波特率固定为晶振频率1/12。
由软件置位串行控制寄存器(SCON)的REN后才能启动串行接收,在CPU将数据写入SBUF寄存器后,立即启动发送。
待8位数据输完后,硬件将SCON寄存器的TI位置1,TI 必须由软件清零。
五.实验程序框图
六.实验程序
TIMER EQU 01H
ORG 0000H
AJMP START
ORG 000BH ;T0 中断程序入口地址AJMP INT_T0
ORG 0040H
START:
MOV SP,#60H
MOV TMOD,#01H ;T0 方式1 MOV TL0,#00H ;延时50mS 的常数MOV TH0,#4BH
MOV R0,#0H
MOV TIMER,#20
MOV SCON,#00H ;置串口工作方式0
CLR TI
CLR RI
SETB TR0 ;开中断
SETB ET0
SETB EA
SJMP $
INT_T0: ;T0 中断子程序
PUSH ACC ;保护现场
PUSH PSW
CLR EA ;关中断
CLR TR0
MOV TL0,#00H ;延时50mS 的常数
MOV TH0,#4BH
SETB TR0
DJNZ TIMER,EXIT
MOV TIMER,#20 ;延时一秒的常数
MOV DPTR,#DATA ;置表格基址
MOV A,R0 ;置表格偏移量
MOVC A,@A+DPTR ;读表格数据
CLR TI
MOV SBUF,A ;串行发送数据
INC R0
CJNE R0,#0AH,EXIT ;判断是否到表尾
MOV R0,#00H ;调整表格偏移量
EXIT: SETB EA ;开中断
POP PSW
POP ACC ;恢复现场
RETI
;数码管显示常数表
DATA: DB 03H,9FH,25H,0DH,99H,49H,41H,1FH,01H,09H
;0 1 2 3 4 5 6 7 8 9 END。