APM2 APM2 中文快速入门指南- 第一篇硬件和常用软件-rev1
网络管理员APM指南 电脑资料.doc
网络管理员APM指南电脑资料事实上,应用程序不再是静态的了(或者说不像其20年前的那种静态了),而这是由多方面的因素造成的,其中就包括应用程序部署和消费方式的改变,云计算和社交媒体的蓬勃开展引发了各种应用程序不断的网络连接和更新需求,甚至在某些情况下(如某些时效性敏感的“一次性”事件对应用程序的需求)的自我更新需求。
在这种背景下,软件开发商都认可“少量屡次”更新的观点来支持应用程序对于敏捷性和持续交付方面的需求,进而为用户带来更大的增量效益。
这在理论上对于那些有充分的耐心,并期待能够不断的从更新中获得一些新的或额外功能的用户而言,肯定是好。
但对于网络员和系统管理员从后台来看,这就像一个“捣蛋的人”每天早上都将您原本快要完成的拼图打乱。
鉴于大多数的IT管理系统都需要软件代理安装在需要管理的设备上,动态的应用程序也必要通过代理来进行不断的更新。
那么,如何很好的限制这种不断的更新升级需求对于资源的开销,通过APM防止其成为一个资源消耗的无底洞呢?但APM本身的开展尚有些滞后。
其是否伴随着网络云效劳的出现相应的开展出与之匹配的管理工具呢:诸如可以用来控制移动应用程序和数据landscape的工具。
因此,如何通过APM带来更好的网络连接呢?答案(或至少是答案的一局部)就在于APM在网络层面如何变得仪器管理更加智能化:仪器是如何进行测量的,数据本身是如何被提供的。
这便是荷兰性能监测公司Jinspired的创始人威廉?劳斯的看法。
“自适应的APM采用更现代的方法,进一步通过测量其自身及其所提供的相关数据的价值的间接本钱。
使用动态预算机制和价值分析技术,新的APM现在在这方面更易于管理。
”他说。
“因为这种智能测量现在已经转移到了运行阶段(而不仅仅只是停留在安装和配置阶段),新的APM解决方案更适合于连续部署。
”在他所从事的领域采用“自适应控制”技术,通过良好的应用程序管理,而不是简单地对其进行监视,APM增加的价值大大抵消了其部署本钱。
Blueware APM用户手册V3.0
BLUEWARE APM用户手册2013年7月序言本手册为Blueware APM v2.0产品资料,主要描述了Blueware APM v2.0产品的功能,架构,配置,使用及常见的问题等知识。
帮助用户快速的学习和掌握Blueware APM产品的功能和配置方法,实现Blueware APM产品的最佳体验。
本手册版权为北京蓝海讯通科技有限公司所有。
未经本公司的书面许可,不得以任何形式或手段复制或摘录本手册内容。
目录BLUEWARE APM用户手册 (1)1.Blueware简介 (5)1.1 Blueware APM产品的作用 (5)1.2 Blueware APM产品的主要优势 (6)2.Blueware APM软件产品架构 (7)2.1 BluewareAPM Agent (7)2.2可配置的Blueware APM server用户界面 (8)3.Blueware APM Agent准备及原理 (9)3.1 Blueware APM Agent安装要求 (9)3.2 Blueware APM Agent系统资源要求 (9)3.3 Blueware APM Agent操作系统支持 (9)3.4 Blueware APM Agent JRE 要求 (9)3.5 Blueware APM Agent JRE环境变量设置 (10)3.6获得Blueware APM Agent安装介质 (10)3.7 Agent如何在首次启动获得配置 (10)3.8 Agent的配置数据存储 (11)4.Blueware Apm Agent日常管理 (12)4.1 启动BLUEWARE代理 (12)4.2 停止BLUEWARE代理 (12)4.3 重启BLUEWARE代理 (12)4.4 从Windows命令行查询Agent运行状态 (13)4.5 从UNIX平台的命令行查询Agent运行状态 (13)5.Blueware APM对于IT资源的管理架构 (15)5.1 IT资源分类 (15)5.1.1 Platform、server、service (16)5.1.2 组和应用 (17)5.2 自动发现并添加资源到资源模型库中 (21)6.管理Blueware监控设置 (24)6.1 监控总览 (24)6.2 查看更改默认收集性能指标 (24)6.3 管理性能指标数据 (25)6.4 日志跟踪 (27)6.5 配置跟踪 (31)7.使用Blueware APM用户管理选项 (34)8.警报指南 (38)8.1 Blueware APM警报主要概念 (38)8.2 建立配置通知的方式 (41)8.3 查看警报及更新警报状态 (43)9.监控、分析和报表 (45)9.1 为性能指标数据生成图表 (45)9.2 报表中心 (48)10.使用资源的控制操作 (49)10.1 概述 (49)10.2 支持管理操作 (49)10.3 在Blueware APM中执行管理操作 (49)附Blueware APM一般问题 (52)1 Blueware APM Agent对被监控系统的负载如何? (52)2 网管软件与Blueware APM的异同 (52)3 可以监控多少资源? (52)4 Blueware APM服务器可与现存的管理工具的共存? (52)5 用Blueware APM监控关键生产环境是否安全? (53)6 Blueware APM支持多用户吗? (53)7 为什么使用代理?可使用无代理方式吗? (53)8 Blueware APM对触发的警报有哪些报警方式? (54)9 Blueware APM可回溯历史数据吗?如何回溯? (54)10 历史数据保存多长时间?可以设置吗? (54)11 Agent需要以root运行吗? (55)12 如何在机器启动时启动Agent? (55)1.Blueware简介Blueware APM是由北京蓝海讯通科技有限公司研发,并于2010年获得北京市科技进步二等奖,目前Blueware APM软件也已成功应用于运营商,金融,政府等多个行业。
APMS快速上手手册

第一部分目录规化1、磁盘要求①、磁盘文件系统格式必须采用NTFS格式,(FAT32格式,当文件数量多后数据会丢失)②、足够大的磁盘存储空间(说明:一般有10G的独立存储空间即可)磁盘转化NTFS格式的方法:方法1:备份原盘数据,直接选择NTFS格式化盘符。
方法2:运行命令convert X:/fs:ntfs,X命令为盘代表为扫描数据存储的盘符。
2、目录结构规化新建几个文件夹,命名为(TXT 文件、模版、图像、名册)存放数据说明:TXT 文件:存放扫描识别系统 ScanProII 导出的*.txt 文件。
模版:存放各科目的扫描模版,扩展名为 *.IRO 文件。
图像:存放各科目的图像文件,如(语文,英语,数学)等。
名册:存放学生名册,扩展名为*.xls。
第二部分 ScanProII使用方法在完成第二部分前,一定要拿一张空白答卷,在考号、客观题的第一行用笔划一横线,使其闭合,以供做模版。
如下图。
做模版之前拿一张空白试卷,把考号、客观题第一行用铅字笔划起来,使其闭合说明:模版制作所定义选项:特征点,考号、客观题识别区域,图像1、扫描仪设置在打开模版设计器时—>工具—>扫描仪选项,1.1点击下拉框,选择扫描仪驱动类型,如图1.2点击选择源选择相应的扫描仪硬件型号,1.3点击设置,按确定2、扫描模板制作2.1新建模板文件打开SCANPRO II 模板设计器点击“新建模版文件” 例如选择纸张尺寸为A3,如果是扫A4的纸张,则在纸张尺寸中选择A4尺寸,点“下一步”,将“扫描仪设置界面”,点击“导入图像”调出扫描界面后,选择相应的用户首选项 如A3ISIS会调出已设置好的参数。
A3ISIS点击确定,模版答卷扫进去后,出现“TScanPro:继续扫描吗?”点击取消。
点击确定,此时答卷只是一张A3,无需页码,如果是有两张或多张A3时,在左上角的特征点处将有所不同,做模版需要定义特征点,考号、客观题识别区域,图像四个部份2.2定义特征点点“特征点工具”将A3答卷上的四个三角形画上,三个亦可。
APM安装与配置

Network Access
DNS Server
NTP Server
Lease Pool
Active Directory Prerequisites
23
Edge Gateway: Network Access/7
Edge Gateway: Network Access Virtual Server:443
192.168.0.61
Windows XP
192.168.0.62 Windows XP
30
Active directory配置
• 在PDC上启用NTP Server:正确配置 Windows 时 间服务 (W32time) 使整个域环境中不同设备系统 时间保持一致,以满足各种服务要求(Kerbos认证 等) • 创建域用户,验证域登录正常。
25
Edge Gateway: Network Access/9
Edge Gateway: Network Access Virtual Server:443
Connectivity Profile
Access Profile
Access Policy
AAA Server
Network Access
Access Profile
Access Policy
Network Access
Lease Pool
21
Edge Gateway: Network Access/5
Edge Gateway: Network Access Virtual Server:443
Access Profile
Access Policy
bigip1 (.221)
bigip2 (.222)
APM全部参数表
ARSPD_RATIO ARSPD_SKIP_CAL
1.9936 0
ARSPD_TUBE_ORDE R
2
ARSPD_USE
0
AUTO_FBW_STEER
0
0:禁用 1:启用
AUTOTUNE_LEVEL BATT_AMP_OFFSET BATT_AMP_PERVOL T BATT_CAPACITY BATT_CURR_PIN BATT_MONITOR BATT_VOLT_MULT
603362704.doc
第 4 页 共 35 页
ARSPD_PIN
0
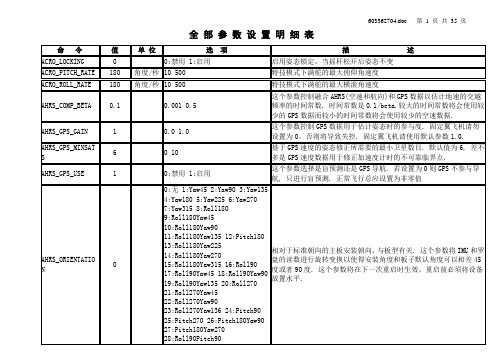
空速计连接到的模拟 IO 口. 设置这个参数为 0-9 来对应 APM2 的模拟 引脚. 使用 APM1 时设置为 64,对应于板子末端的空速计接口. 使用 PX4 时设为 11,对应于模拟空速计接口. 使用 Pixhawk 时设为 15, 对应于模拟空速计接口. 使用 EagleTree 或 MEAS I2C 空速计的 PX4 或者 Pixhawk,设置为 65. 空速计校准后的比率 这个参数允许你在皮托管里的连接顺序有影响时选择. 如果设置为 0 则顶部连接的传感器是动态压强. 如果设置为 1 则底部连接的传感 器是动态压强. 若设为 2(默认)则空速管驱动器将会接受任意一种 顺序.你可能想要指定顺序的原因在于它能够使你的空速计检测飞行 器是不是受到了过大的静压强,而这可能被解读成正空速. 1:使用 0:不使用 使用空速数据进行飞行控制 开启此项将使得在自动模式中可以使用 FBWA 的方式进行操控. 这可 以用来执行带有航点逻辑的人工增稳飞行,或可用于载荷[译注:即 飞的时候知道航点,一个个航点飞过去]. 启用后飞行员拥有和 FBWA 模式中一样的操控, 但普通的自动模式导航被完全禁用. 寻常情况 不推荐这个选项. 自动调参的激烈程度. 在较低等级的 AUTOTUNE_LEVEL 上自动调参较 为柔和, 增益较小. 对于大多数用户而言推荐 5 级. 在 0 电流情况下传感器的电压读数偏移值 当电流传感器读数为 1V 时转换得到的电流值. 对于使用 3DR 电源模 块的 APM2 或者 Pixhwak 这个值必须为 17. 对于使用 3DR 四合一电调 的 Pixhawk 这个值必须为 17. 满电电池的容量,以 mAh 计 -1:禁 用 1:A1 12:A12 2:A2 3:Pixhawk 101:PX4 设置这个参数为 0 至 13 将指定电池电流传感器的管脚对应于 A0 至 A13. 对于 APM2.5 的电源模块,这个值必须为 12. 在 PX4 上这个值 必须为 101. 对于使用电源模块的 Pixhawk 这个值必须为 3. 控制电池电流或电压监控 用来将电压传感器管脚检测到的电压值(BATT_VOLT_PIN)转换成实际 电压值(管脚电压*VOLT_MULT). 对于 APM2 或者 Pixhawk 的 3DR 电源
APM全部参数表
AHRS_YAW_P
0.2
0.1 0.4
ALT_CTRL_ALG
0
0:自动
ALT_HOLD_FBWCM
0
厘米
ALT_HOLD_RTL
10000
厘米
ALT_MIX
1
百分比 0 1
603362704.doc
第 3 页 共 35 页
空开启的 GPS, 例如你在离地几千米的地方从气球上抛下一个飞机 时. ALT_OFFSET 0 米 -32767 32767 这是在自动飞行模式下加入到目标高度数值的高度偏移量. 这可以 用来在自动模式中加入全球高度偏移ARMING_DIS_Fra bibliotekUD0
ARMING_REQUIRE
2
0:禁用 1:解锁后油门 PWM 在 THR_MIN(怠速) 2:解锁后油门 0PWM(停转)
ARSPD_AUTOCAL ARSPD_ENABLE ARSPD_FBW_MAX ARSPD_FBW_MIN ARSPD_OFFSET
0 0 22 9 833.2711
AHRS_ORIENTATIO N
0
相对于标准朝向的主板安装朝向, 与板型有关. 这个参数将 IMU 和罗 盘的读数进行旋转变换以使得安装角度和板子默认角度可以相差 45 度或者 90 度. 这个参数将在下一次重启时生效,重启前必须将设备 放置水平.
603362704.doc
第 2 页 共 35 页
ARSPD_RATIO ARSPD_SKIP_CAL
1.9936 0
ARSPD_TUBE_ORDE R
2
ARSPD_USE
0
AUTO_FBW_STEER
0
0:禁用 1:启用
APM的帮助文件中文版

练习1. 同源模建PART I. FUGUE前言HI0029是一个青霉素受体结合蛋白5前体,由393个氨基酸残基组成,复合物的结构已经被结晶出来,然而还没有关于其的三维结构信息,本教程的目标就是通过FUGUE这个序列识别工具识别其同源蛋白。
运行FUGUE1.在开始之前先清空屏幕并重置所有的显示> Delete Everything点击显示工具栏上的重置所有移动和旋转2.运行FUGUEBiopolymer > Model Proteins > FUGUE > Run FUGUEFUGUE对话框出现3.导入数据设定Input Sequence菜单为FASTA File点击旁边的[...]打开文件浏览器选择书签列表中的[$TA_DEMO],选择文件列表中的HI0029.fasta设定Profiles to Search菜单为All Profiles4.查看对话框上的选项这是一个不包含PSI-BLAST简单的FUGUE运行程序默认情况下,会报道10个默认的FUGUE家族5.执行任务在Jobname处填上HI0029点击OK开始运行程序分析FUGUE结果1.读取程序运行结果Biopolymer > Model Proteins > FUGUE > View FUGUE ResultsFUGUE Results对话框弹出点击Run Directory旁边的[...]选择文件列表中的HI0029然后点击OK对话框中的列表显示:相对于三个家族HI0029的得分比较高,这三个家族的ZSCORE都大于6,并且置信度为99%,其后由CERTAIN表示。
2.观察结果点击列表上方的View HTML Summary完成后点击OK关闭浏览窗口在FUGUE Results对话框中,选择ma叠合方式点击View alignmentma选项允许查看所有相应于HOMSTRAD家族中同源蛋白的序列叠合结果。
APM2 APM2 中文快速入门指南- 第一篇硬件和常用软件-rev1
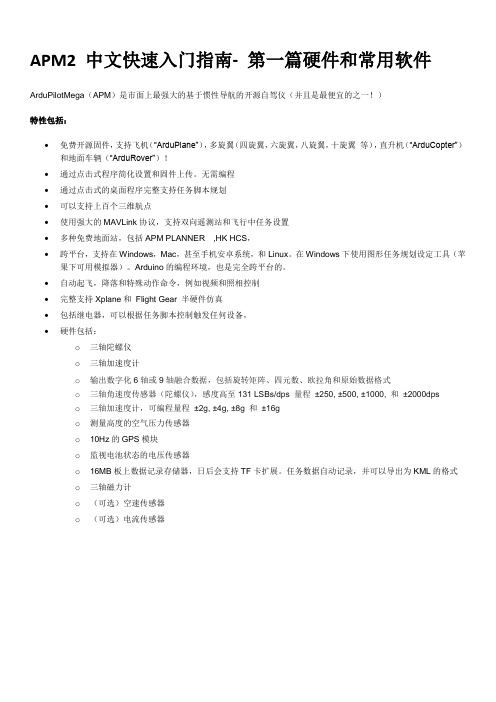
APM2 中文快速入门指南-第一篇硬件和常用软件ArduPilotMega(APM)是市面上最强大的基于惯性导航的开源自驾仪(并且是最便宜的之一!)特性包括:∙免费开源固件,支持飞机(“ArduPlane”),多旋翼(四旋翼,六旋翼,八旋翼,十旋翼等),直升机(“ArduCopter”)和地面车辆(“ArduRover”)!∙通过点击式程序简化设置和固件上传。
无需编程∙通过点击式的桌面程序完整支持任务脚本规划∙可以支持上百个三维航点∙使用强大的MAVLink协议,支持双向遥测站和飞行中任务设置∙多种免费地面站,包括APM PLANNER ,HK HCS,∙跨平台,支持在Windows,Mac,甚至手机安卓系统,和Linux。
在Windows下使用图形任务规划设定工具(苹果下可用模拟器)。
Arduino的编程环境,也是完全跨平台的。
∙自动起飞,降落和特殊动作命令,例如视频和照相控制∙完整支持Xplane和Flight Gear 半硬件仿真∙包括继电器,可以根据任务脚本控制触发任何设备,∙硬件包括:o三轴陀螺仪o三轴加速度计o输出数字化6轴或9轴融合数据,包括旋转矩阵、四元数、欧拉角和原始数据格式o三轴角速度传感器(陀螺仪),感度高至131 LSBs/dps量程±250, ±500, ±1000, 和±2000dpso三轴加速度计,可编程量程±2g, ±4g, ±8g 和±16go测量高度的空气压力传感器o10Hz的GPS模块o监视电池状态的电压传感器o16MB板上数据记录存储器,日后会支持TF卡扩展。
任务数据自动记录,并可以导出为KML的格式o三轴磁力计o(可选)空速传感器o(可选)电流传感器APM对于玩家的要求较深的航模知识玩飞控的想法符合实际有一定的电子基础略懂英文及编程APM1和APM2的差别APM1和APM2之间的主要差别在传感器。
APM环境准备帮助手册

APM环境准备帮助手册第1章需要准备的内容为实现XX客户业务资源的监控,需要XX客户提供主机信息、配置端口镜像。
具体包括:1、请填写“第2章业务系统调研表”并提交。
2、为待监控主机关联交换设备配置端口镜像,具体见“第3章交换机端口镜像方法”。
3、如果待监控主机使用VMWare服务器虚拟化方案的,需要在VMWare中配置端口镜像,具体见“第4章 VMWare端口镜像”。
4、为APM一体机及VMWare中新增的虚拟服务器规划IP地址。
第2章业务系统调研表此表格需要XX客户配合填写,默认按照业务系统划分,需要把系统名称、IP地址、用途、所安装的服务软件、物理位置都填进去。
详细参见《APM调研表.XLS》第3章交换机端口镜像方法3.1 CISCO端口镜像配置3.1.1 配置本地SPAN3.1.2 基于VLAN的SPAN3.1.3 Specifying VLANs to Filter3.2 华为配置本地端口镜像组网需求如图1所示,HostA通过接口GigabitEthernet1/0/1接入SwitchA。
Server直连在SwitchA的GigabitEthernet1/0/2接口上。
用户希望通过监控设备Server对HostA发送的报文进行监控。
图1 配置本地端口镜像组网图配置思路采用如下的思路配置:1配置SwitchA的接口GigabitEthernet1/0/2为本地观察端口,使直连的监控设备Server能够接收到镜像报文。
2配置SwitchA的接口GigabitEthernet1/0/1为镜像端口,实现对接口的报文进行监控。
操作步骤1配置观察端口2配置镜像端口3验证配置结果3.3 H3C端口镜像配置命令3.3.1display mirroring-group【命令】display mirroring-group { group-id| all | local }[ | { begin | exclude | include } regular-expression ] 【举例】# 显示所有镜像组的信息。
APM固定翼设置完整手册(方少版)

输入引脚供电,但输出引脚将需要自己的电源。如果你想在飞机上用两个独立的 电源,可以使用这种配置,一个为舵机供电,一个为其他电子设备供电。
APM2 设计要求一个清洁、良好滤波的电源。注意根据连接的插头不同,电压规 格要求是不同的。原因是有一个肖特基二极管(二极管 D1),防止 USB 端口在 连接时给 APM2 的 PWM 输出接口供电而损坏东西。因此,当 USB 未通电, 并通过 PWM 输出连接器连接电源时,横跨这个二极管有一些压降,所以要求更 高的输入电压来做补偿。因此,电力需求如下:跳线 JP-1 断开时,5.0VDC +/- 0.5V 到 PWM 输入接口。跳线 JP-1 连接时,5.37VDC +/- 0.5V 到 PWM 输出接口。
需要更快的设定及启动吗?这个导览提供了一个简单的方法。ArduPlane 还有许 多的功能需要设定,但这几篇文章可以让你尝鲜:
1. 安装驱动及 Mission Planner 2. 连接遥控设备 3. 首次设置 4. APM 开机和校准 5. 规划航点和任务
没关系,只要从 这里下载驱动程序,保存到电脑的一个文件夹里。
• 无内置电压监测。大多数人觉得电流监测比电压有用,所以我们现在推荐 Sparkfun 电流传感器,可插入到一个传感器的插座上。
APM 1 和 APM 2 的差别
APM 1 和 APM 2 之间的主要功能差异是传感器。 AMP 2 拥有先进的 InvenSense MPU-6000 陀螺仪/加速计芯片,它有自己的传感器融合处理器。它 还有一个测量海拔的高精度压力传感器。
还不要点击“Connect”! 请先将固件程序加载你的 APM。
在APM2上使用3DR电台
在APM2上使用3DR电台在APM 2 上使用3DR 电台3DRobotics 的3DR 电台是设置APM 和地面站之间的遥测连接的一个理想的方式。
它体积小,价格低,范围大,使用开源固件,允许我们做一些其他电台做不到的事情。
电台特性体积非常小重量轻(不含天线仅 4 克)可选择900MHz 或433MHz 版本接收灵敏度为-121 dBm发射功率为20dBm(100mW)透明的串行链路空中的数据传输速率高达250kbpsMAVLink 协议帧和状态报告跳频展频(FHSS)自适应时分多路复用(TDM)支持LBT 和AFA可配置占空比内建错误校正代码(可以矫正高达25% 的数据位错误)使用小全向天线可达数公里范围可用双向放大器获得更大的范围开源固件AT 命令配置数传RT 命令远程配置数传与APM 使用时自适应流量控制基于HM-TRP 无线模块,带有Si1000 8051微控制器和Si4432 无线模块。
连接3DR 电台你将需要两个3DR 电台,飞机上一个,地面站上一个。
如果你看上面的图片,会发现一些电台有一个USB接口,因此很容易连接到你的地面站上。
FTDI 的驱动可以在这里下载。
飞机上的带有一个FTDI 的连接器,可以直接连接到你的APM 遥测端口。
如下图所示,连接到APM 2 上:重要提示:在你的 APM 2 连接到 USB 上时不能连接电台(它们共享同一个端口)。
在尝试无线连接之前,确保你从APM 2 上拔下了USB 线缆。
电台预先配置的串口速率为57600,也就是APM 默认使用的遥测速率,但你可以通过AT 命令或APM Planner 的电台设置界面改变成任何你喜欢的速率。
状态LED3DR 电台有 2 个状态指示灯,一红一绿。
LED 不同状态的含义如下:绿色LED 闪烁- 寻找另一个数传绿色LED 常亮- 已经与另一个数传建立链接红色LED 闪烁- 数据传输红色LED 常亮- 固件更新模式使用Mission Planner 设置最新版本的APM Mission Planner 可以通过简单的图形用户界面设置3DR 电台。
APM2322中文资料

ANPEC reserves the right to make changes to improve reliability or manufacturability without notice, and advise customers to obtain the latest version of relevant information to verify before placing orders.APM2322Ordering and Marking InformationFeaturesApplicationsAbsolute Maximum Ratings (T A = 25°C unless otherwise noted)• 20V/1.5A , R DS(ON)=195m Ω(typ.) @ V GS =4.5VR DS(ON)=295m Ω(typ.) @ V GS =2.5V• Super High Dense Cell Design for ExtremelyLow R DS(ON)• Reliable and Rugged • SOT-23 Package• Power Management in Notebook Computer ,Portable Equipment and Battery Powered Systems.* Surface Mounted on FR4 Board, t ≤ 10 sec.Pin DescriptionGDSTop View of SOT-23N-Channel MOSFETGSAPM2322Notesa : Pulse test ; pulse width ≤300µs, duty cycle ≤ 2%b: Guaranteed by design, not subject to production testingAbsolute Maximum Ratings (Cont.) (T A = 25°C unless otherwise noted)Electrical Characteristics (T A = 25°C unless otherwise noted)APM232201234560.120.160.200.240.280.320.36012345123456-50-2502550751001251500.40.60.81.01.21.4Typical CharacteristicsI D -D r a i n C u r r e n t (A )V GS - Gate-to-Source Voltage (V)Threshold Voltage vs. Junction T emperatureTj - Junction T emperature (°C)V G S (t h )-T h r e s h o l d V o l t a g e (V )(N o r m a l i z e d )R D S (O N )-O n -R e s i s t a n c e (Ω)On-Resistance vs. Drain CurrentI D - Drain Current (A)Output CharacteristicsI D -D r a i n C u r r e n t (A )V DS - Drain-to-Source Voltage (V)0123456APM23224080120160200123456780.500.751.001.251.501.75Typical Characteristics (Cont.)On-Resistance vs. Junction TemperatureT J - Junction T emperature (°C)V DS - Drain-to-Source Voltage (V)Capacitance C a p a c i t a n c e (p F )V GS - Gate-to-Source Voltage (V)R D S (O N )-O n -R e s i s t a n c e (Ω)Gate ChargeQ G - Gate Charge (nC)V G S -G a t e -S o u r c e V o l t a g e (V )0.00.30.60.9 1.2 1.512345APM23221E-41E-30.010.11101000.010.115000.010.111010002468101214Typical Characteristics (Cont.)P o w e r (W )Single Pulse PowerTime (sec)Square Wave Pulse Duration (sec)I S -S o u r c e C u r r e n t (A )V SD -Source-to-Drain Voltage (V)N o r m a l i z e d E f f e c t i v e T r a n s i e n tT h e r m a l I m p e d a n c eNormalized Thermal Transient Impedence, Junction to AmbientAPM2322Packaging Information SOT-23APM2322Reference JEDEC Standard J-STD-020A APRIL 1999Reflow Condition (IR/Convection or VPR Reflow)Physical SpecificationsPre-heat temperature183 CPeak temperatureTime°t e m p e r a t u r eClassification Reflow ProfilesPackage Reflow ConditionsAPM2322Reliability test programCarrier TapeAPM2322Cover Tape DimensionsCustomer ServiceAnpec Electronics Corp.Head Office :5F, No. 2 Li-Hsin Road, SBIP,Hsin-Chu, T aiwan, R.O.C.T el : 886-3-5642000Fax : 886-3-5642050Taipei Branch :7F, No. 137, Lane 235, Pac Chiao Rd.,Hsin Tien City, Taipei Hsien, T aiwan, R. O. C.T el : 886-2-89191368Fax : 886-2-89191369。
智能融合2启动包快速入门指南说明书

SmartFusion2 KickStart KitGetting Started Guidefor theSmartFusion®2 KickStart KitLibero version 11.6Document version 1.0September, 2015Out-Of-Box Getting Started Guide SmartFusion2 KickStart Kit Table of ContentsOverview (3)What’s in the Box? (4)What’s on the Web? (4)Key Features of the KickStart Board (5)Board Level Block Diagram (6)Example Design Requirements (7)Software (7)Hardware (7)Optional Hardware Requirements (7)PC Setup (8)Download and Install the USB UART/JTAG Driver (8)Installing a Serial Console on a Windows 7 Host (12)Download the Windows Test Utility Software (13)Android Setup (14)Setting Up the KickStart Evaluation Board (19)Hardware Design Block Diagram (20)Windows and Android Test Utilities (21)KickStart Board Features Used with the Test Utilities (21)Windows Test Utility Operation (22)Android Test Utility Operation (24)What’s Next (29)Appendix I: Determining the Virtual COM Port (30)Appendix II: Getting Help and Support (32)Avnet Website (32)Microsemi Website (32)Revision History (33)OverviewAvnet’s SmartFusion2 KickStart Kit features the Microsemi M2S010S SmartFusion®2 SoC FPGA, a secure and integrated programmable system-on-a-chip device with 10k logic elements and a 166 MHz ARM® Cortex®-M3 processor. This low power SmartFusion2 device is flash-based and single event upset (SEU) immune. Unlike existing SmartFusion2 development boards, Avnet’s KickStart Board does not require a separate JTAG emulator or power supply, as this is now integrated onto the USB-powered board. For communications, Microchip's RN4020 Bluetooth Low Energy module is provided in addition to USB serial. Two tiny, low power on-board sensors give engineers access to ambient light, gyrometer, accelerometer, and temperature sensors. The Arduino and Pmod-compatible interfaces provide for the easy addition of existing custom modules and therefore facilitate easy and rapid prototyping.This document describes a simple SmartFusion2 SoC FPGA design implemented on the Avnet KickStart Evaluation Board. This example design integrates pushbutton switch user input to change the color of LEDs on the board and manipulate their brightness with a custom Pulse Width Modulator (PWM) block in the FPGA fabric. Other board LEDs, an ambient light sensor, a motion sensor, and Bluetooth Low Energy (BLE) are also integrated and demonstrated with the supplied Windows® and Android™ software applications. These applications demonstrate the reading of sensors and switches to display their data as well as writing to the board LEDs to change their color (red, green, amber, or off).What’s in the Box?∙Avnet KickStart Board∙USB-A to USB micro-B cable∙Quick Start CardWhat’s on the Web?∙Avnet Design Resource Center KickStart Kit Home Page/SmartFusion2-KickStart∙Avnet Support Forum/t5/SmartFusion2-KickStart-Board/bd-p/SmartFusion2-KickStart ∙Getting Started Guide (this document)∙Hardware User Guide∙Test utilities for Windows and Android∙Tutorials and Reference Designs∙Schematics∙Errata∙Board BOMKey Features of the KickStart BoardFPGA SoC∙Microsemi SmartFusion2 M2S010S secure SoC FPGA Communication∙USB FlashPro5 JTAG programming/debug & serial port∙Bluetooth LE using Microchip RN4020 module with MLDP profile Expansion connectors∙Arduino compatible interface for custom and development shields ∙ 3 Pmod compatible interfaces for pluggable peripheralsGeneral Purpose I/O∙ 4 user LEDs∙ 2 pushbutton switches∙ 6 test pinsSpecial Function Peripherals∙Maxim MAX 44009 ambient light sensor∙Motion and temperature sensorClocking∙50MHz LVCMOS oscillatorPower∙Maxim MAX20022 Power management ICBoard Level Block DiagramExample Design RequirementsThe following items are required for proper completion of this getting started guide tutorial. SoftwareThe software requirements for this guide are:∙Windows 7, Windows 8.1∙USB UART/JTAG drivers∙Windows SmartFusion2 KickStart Tester utilityThe software requirements for the Android Test Utility are:∙Android 4.4 (KitKat) and laterHardwareThe hardware setup used by this example design includes:∙Avnet KickStart board∙USB-A to USB-micro B cableOptional Hardware RequirementsThe Android hardware setup used by this example design includes:∙Android tablet or smartphone with Bluetooth LE / BT Smart / BT 4.0 (or later)PC SetupDownload and Install the USB UART/JTAG DriverThe USB UART/JTAG drivers must be installed prior to running the Windows SF2 KickStart Tester utility. These drivers are included with the Microsemi Libero SoC tools installation and are also installable separately. If the Libero tools have not been installed yet, follow the instructions below to install these drivers. See Appendix I: Determining the Virtual COM Port for information on identifying the COM port in use on the host PC.e a web browser to navigate to /SmartFusion2-KickStart. Click on thelink to enter the Avnet DRC page for the SmartFusion2 KickStart Kit.You will be prompted to either register or provide your login credentials:2.Scroll to the bottom of the page and click to download the USB Drivers. Download and extract thezip archive to a folder of your choice. Do not close the browser window.ing Windows Explorer, navigate to the <installation>\USB_Drivers folder and double-click theFPDrivers.exe application executable.4.If prompted, click Yes to allow the application to make changes to the computer.5.You will see a couple of status windows as the installer prepares and installs the files.6.Click Next to continue the installation:7.Windows will complain that it can’t verify the publisher of the drivers. This is OK. Click Install thisdriver software anyway to continue:8.Click Finish to complete the installation. The USB UART drivers are now ready to use.9.The FTDI USB chip on the KickStart board provides four COM ports, but only two are used. Port A isused for JTAG communication with the SmartFusion2 SoC FPGA and Port C is a standard serial UART:10.However, all four ports are displayed in the Windows Device Manager. The Libero tools (Port A) andthe Windows Test Utility (Port C) are designed to know which COM port to connect to. Theremaining ports are phantom with no system connection:←←Installing a Serial Console on a Windows 7 HostStarting with Windows 7, Microsoft no longer includes the HyperTerminal terminal emulator software.A suitable free and open-source replacement for HyperTerminal is TeraTerm. Download and install instructions for TeraTerm can be found at http://en.sourceforge.jp/projects/ttssh2.Download the Windows Test Utility Software1.Open the web browser you used earlier. If you closed the browser then open a new one andnavigate to /SmartFusion2-KickStart. Click on thelink to enter the Avnet DRC page for the SmartFusion2 KickStart Kit.You may be prompted to either register or provide your login credentials:2.Scroll to the bottom of the page and click to download the Windows Test Utility. Download andextract the zip archive to a folder of your choice where you have permissions to create folders. Note the location of the extracted SF2KickStartTester.exe software application. You will need this later.Do not close the browser window.Android SetupThe KickStart Board is equipped with a Bluetooth 4.1 Low Energy (BLE) module from Microchip, making the board a great platform for prototyping low bandwidth wireless applications. If you have an Android tablet or smartphone you can download and install the Android Test Utility and interact with the LEDs, switches, and sensors on the KickStart Board over the Bluetooth interface.1.Make sure your Android device supports Bluetooth Low Enegery (LE) 4.0 or later as described in theOptional hardware Requirements.2.Open the web browser you used earlier. If you closed the browser then open a new one andnavigate to /SmartFusion2-KickStart. Click on thelink to enter the Avnet DRC page for the SmartFusion2 KickStart Kit.You will be prompted to either register or provide your login credentials:3.Scroll to the bottom of the page and click to download the Android Test Utility. Download andextract the zip archive to a folder of your choice. Note the location of the extracted softwareapplication. You will need this later. Do not close the browser window.4.The easiest way to install the Android Test Utility on your Android device is via email attachment.Using your favorite PC email client, send an email to an account accessible by your Android device with the <installation>\Android_Test_Utility\KickStartAndroid.apk file as an attachment.5.Once the email has been received on the Android device, tap on the KickStartAndroid.apk fileattachment and you should be prompted to open the file with the Package Installer. Tap thePackage Installer icon to install the application.6.For security reasons your Android device may be blocked from installing applications from unknownsources. You may need to edit your device settings to allow the application to be installed. The specific procedure for doing this varies among Android vers ions and also depends on the phone’s manufacturer, but will be similar to the following steps. Select Settings to go directly to the Security Settings.7.Look for a setting named Unknown sources or something similar and tap to enable installation fromboth trusted and unknown sources:8.You may be prompted to verify that you know what you are doing, and to enable this setting for thisinstallation only. Tap OK to continue:9.Tap INSTALL to install the application:10.You may see a status window as the application installs. Tap DONE to close the installer. We arenot ready to use the Android Test Utility yet.Setting Up the KickStart Evaluation BoardRefer to the following figure and perform the following steps to set up the board for running the example design.J8JTAG & UART1.Plug a USB cable into the PC and the combination JTAG & UART port (J8) (this will also power theboard).Hardware Design Block DiagramThe following figure shows a high-level block diagram of the hardware design:Windows and Android Test UtilitiesKickStart Board Features Used with the Test UtilitiesRefer to the figure below when running the Windows or Android Test Utility software applications. Note the location of the pushbutton switches, DIP switches, LEDs, and sensors.Windows Test Utility Operation1.Be sure you have downloaded the test utility as described in Download the Windows Test UtilitySoftware.ing Windows Explorer, navigate to the <installation>\Windows_Test_Utility folder and double-click the SF2KickStartTester.exe application executable.3.When the application starts it will ping the available serial COM ports to identify the port connectedto the USB UART port on the KickStart Board (COM22 in the screenshot below). Recall from the Download and Install the USB UART/JTAG Driver instructions that four COM ports are reported in Windows Device Manger but only two are connected to the SmartFusion2 SoC FPGA device on the KickStart board. Click on Open Port to open the Test Utility Dashboard:4.The Test Utility will default to displaying the Dashboard tab:e this tab to interact with the LEDs and switches on the KickStart Board.a.Select different colors for the tri-color LEDs to display, and alter their brightness and blink rate:b.Press the pushbutton switches on the KickStart Board and watch the status of each switchchange in the Dashboard:c.Click on Continuous Read to determine the status of the Light and Motion Sensors:This concludes the description of the Windows Test Utility application.Android Test Utility Operation1.Be sure you have downloaded and installed the Android application as described in Android Setup.2.Do not try and use your phone’s Bluetooth settings to connect to the KickStart board directly. Thiswill cause connection issues with the Android Test Utility application.3.Go to your Android device where the test utility application is installed and look for the applicationicon. Tap the icon to open the application.4.If the Bluetooth interface is currently disabled you will be prompted to allow the application to turnit on. Tap YES to continue:5.When the application starts it will automatically scan and find the KickStart Board. Tap on theDevice name to open the dashboard similar to the Windows Test Utility application youprobably used earlier. If the application does not connect, or if it quits unexpectedly, you may need to restart your Android device.6.Much like the Windows Test Utility, the Android Test Utility allows you to set the color of the tri-color LEDs, read the pushbutton switches, and read the status of the light and motion sensors:e the application to interact with the LEDs and switches on the KickStart Board.a.Select different colors for the tri-color LEDs to display:b.Press the pushbutton switches on the KickStart Board and watch the status of each switchchange:c.Tap on Continuous to read the status of the light and motion Sensors:8.You will notice that as the application reads the sensors and switches the communication messagesare displayed at the bottom of the screen:9.When finished tap DISCONNECT to close the Bluetooth connection and close the application.This concludes the description of the Android Test Utility application.What’s NextNow that you have taken some time to explore the Windows and Android Test Utilities and interacted with the example design programmed into the SmartFusion2 SoC FPGA device on the KickStart Board, it is time to explore how to modify this design or create a new design of your own. Please refer to the SF2 KickStart Reference Design Tutorial (included in the SF2 KickStart Reference Design files available online at /SmartFusion2-KickStart) to learn more about this design and how to perhaps customize it for your own application using the SmartFusion2 SoC FPGA device.This concludes this Getting Started Guide.Appendix I: Determining the Virtual COM PortNow you can connect the evaluation board’s USB-to-UART port to one of the USB ports on your PC. The new hardware detection will pop up and enumeration of the driver will be started. Once finished a virtual COMx port is created and you are ready to setup a connection using Windows HyperTerminal or comparable serial terminal emulation utility. Follow these instructions to determine the COMx port assigned to the USB-to-UART bridge:1.Open the Device Manager by right-clicking on , select Properties, then click on theDevice Manager.2.In the Device Manager, scroll down to Ports and expand the list. You will see the USB Serial Port andits assigned COM port. Recall from the Download and Install the USB UART/JTAG Driver instructions that four COM ports are reported in Windows Device Manger but only two are connected to the SmartFusion2 SoC FPGA device on the KickStart board. In the example below, the JTAG interface is COM20 and the UART is COM22. Make note of this COM port number for use with the Windows Test Utility that you will use elsewhere in this design tutorial. This concludes these USB UART driver and virtual COM port installation instructions.← Port A, JTAG← Port C, UARTAppendix II: Getting Help and SupportAvnet Website∙Evaluation Kit home page with Documentation and Reference Designs/SmartFusion2-KickStart∙Avnet support forum/t5/SmartFusion2-KickStart-Board/bd-p/SmartFusion2-KickStart Microsemi Website∙More information about the SmartFusion2 KickStart Board:/products/fpga-soc/design-resources/dev-kits/smartfusion2/kickstart-kit ∙Helpful web links for more information about the SmartFusion2 family of SoC FPGA devices o Family Overview/products/fpga-soc/soc-fpga/smartfusion2#overview o Product Tables/products/fpga-soc/soc-fpga/smartfusion2#product-tables o Documentation/products/fpga-soc/soc-fpga/smartfusion2#documentation o Design Resources/products/fpga-soc/soc-fpga/smartfusion2#design-resources∙Details on the SmartFusion2 SOC FPGA family are included in the following documents: o Product Brief (PB0115)o Data Sheet (DS0451)o Configuration User Guide (AC401)∙Microsemi SmartFusion2 product support/products/fpga-soc/design-support/fpga-soc-support。
APM使用Copter(直升机和多轴)固件的中文参数表

0
度
-10 -- 10
不用
AHRS_WIND-MAX
0
米/秒
0 -- 127
設置風速的最大值,即空速與地速的速差,如果為0,則始終以空速作為參考
AHRS_YAW_P
0.1
0.1 -- 0.4
羅盤或GPS對AHRS航姿系統中航向控制的P值
ANGLE_MAX
4500
限制所有飛行模式中飛機的最大傾斜角
6
0 -- 10
AHRS航姿系統中,GPS起作用的最小搜星數量,默認6顆,低於6顆,航姿系統中的GPS不起作用
AHRS_GPS-USE
1
0,1
AHRS航姿系統的GPS開關,0:關閉,1;開啟
AHRS_ORIENTATION
0
0 -- 37
AHRS航姿系統中,飛快安裝方向與標準方向的偏轉矯正,0-無,1-偏航45度,2-偏航90度,…………37-橫滾90度+偏航270度
COMPASS_EXTERNAL
1
0,1
羅盤選擇,0-內置羅盤,1-外置羅盤
COMPASS_LEARN
0
0,1
啟動或關閉羅盤的自學習偏移量
COMPASS_MOT_X
0
-1000 -- 1000
對油門值進行偏移並融合到羅盤的X軸上,用來抵消大油門時電機導線磁場對羅盤X軸的干擾,需開啟COMPASS_MOTCT
BATT_CAPACITY
3300
毫安培時
設置電池容量,APM將根據電流大小和放電時長計算剩餘容量
BATT_CURR_PIN
12
-1,1,2,3,12,101
設置電流感測器使用的埠,-1不使用;1-A1;2—A2;3- Pixhawk用;12-A12;101-PX4用
apm飞控基础学习知识入门基础教学教育资料

Apm 飞控较为详细的入门教程最近发现很多模友在看了泡泡老师的视频有很多细节没有看懂在群上提问,为了能使刚用上apm的模友一步到位,再来一个文字教程帮助你们快速使用。
在此也感谢apm2.8交流群中的冷风群主提供的教程~废话不多说了硬件安装1、通过USB接口供电时,如果USB数据处于连接状态,APM会切断数传接口的通讯功能,所以请不要同时使用数传和USB线连接调试APM,USB接口的优先级高于数传接口,仅有供电功能的USB线不在此限;2、APM板载的加速度传感器受震动影响,会产生不必要的动差,直接影响飞控姿态的计算,条件允许请尽量使用一个减震平台来安装APM主板;3、APM板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。
另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。
使用建议对于初次使用APM自驾仪的用户来说,建议你分步骤完成APM的入门使用:1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能;2、仅连接USB线学会固件的下载;3、连接接收机和USB线完成APM的遥控校准、加速度校准和罗盘校准;4、完成各类参数的设定;5、组装飞机,完成各类安全检查后试飞;6、PID参数调整;7、APM各类高阶应用地面站调试软件Mission Planner安装首先,MissionPlanner的安装运行需要微软的Net Framework 4.0组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0并安装安装完NetFramework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载,下载页面中每个版本都提供了MSI版和ZIP版可供选择。
MSI 为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB 线即可使用。
APM for PX4飞控使用手册-第一章:起步-中文翻译

APM for PX4飞控使用手册第一章:起步——sw笨笨翻译1.介绍:3D Robotics的开源飞控技术解决方案APM:Copter,带有高级组织形式的个人自动导航仪技术,能够为飞行器带来易用的自主飞行能力。
本手册可以带领您进行第一次的设置、调参和飞行活动。
2.什么是APM:Copter系统APM:Copter是一种基于APM飞控板和Mission Planner地面站软件的多用途无人系统。
APM飞控通过内置的陀螺仪、加速度计和其他电子元件控制多旋翼的飞行。
在地面站计算机上使用Mission Planner定制飞行任务并下载到APM。
一旦飞行器进入自主飞行模式,APM从GPS模块读取位置信息并执行任务脚本。
为了安全起见,APM需要连接一个遥控器,用于对飞行器进行人工遥控。
飞行器使用锂电池作为电源,每次飞行要至少带两块电池。
要使得飞行更加有趣,你可以搭载有效载荷:空中拍照,视频片段,或者你自己需要的任务设备。
试飞APM的基本步骤如下:1)起步:了解APM:Copter以及无人机系统组成。
2)组装:建立你的旋翼系统,包含飞控和GPS模块。
3)地面站设置:在地面站计算机上安装Mission Planner,并向飞控板上传固件。
4)设置遥控器:建立遥控器与飞控的连接,设置飞行模式,启动传感器。
5)调参(DIY需要):校准电调,核对电机的旋转以及旋转方向,校准性能并调参。
6)建立飞行任务:Mission Planner介绍,创建导航点,下载任务。
7)飞行:启动测试飞行,安全飞行,飞行策略,飞行检验,和应急程序。
3.系统构成要使用APM:Copter你需要如下设备:1)多旋翼飞行器(前两句广告略——译者注)新手比较适合使用四旋翼飞行器,相关需求成本较低,使用简单。
六旋翼飞行器比四旋翼飞行器稳定,带载荷能力较强。
Y6型六旋翼飞行器飞行效率较常规六旋翼略低,但是更加稳定,设计更加有利于前置摄像机,并且能够在单发动机失效的情况下提供裕度。
《APM调试步骤》整理版
《APM调试步骤》整理版最近一直在研究APM,现在对APM不能说完全懂但也是略知7 8了,(所以说没有什么是学不会的,只要你肯学)因为我也要入多轴坑啦,欢迎我吧,之前一直玩固定翼、飞翼FPV,但是这种飞机场地要求性比较高,没有多轴好随时随地起飞,而且天气越来越冷了风也大了飞的话肯定没有多轴稳定在此把我自己在网上搜索的一些APM知识整理了以下在此跟大家分享,一些常见的重要的问题已经在内容中加粗希望对大家有所帮助当一个全新的固件下载进APM板以后,你首先需要做的是三件事:一是遥控输入校准,二是加速度校准,三是罗盘校准,如果这三件事不做,后续的解锁是不能进行的,MP的姿态界面上也会不断弹出红色提示:PreArm: RC not calibrated(解锁准备:遥控器没有校准)file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/Temp/mso html1/02/clip_image004.jpgPreArm: INS not calibrated(加速度没有校准)file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/Temp/mso html1/02/clip_image006.jpgPreArm: Compass not calibrated(罗盘没有校准)file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/Temp/mso html1/02/clip_image008.jpg遥控校准遥控校准需要连接你的接收机,具体连接请查看APM连接安装图,连接好后连接APM的USB数据线(也可以通过数传进行连接),然后打开遥控器发射端电源,运行MP,按下图步骤选择好波特率与端口后点击connect连接APM,接着点击Install setup(初始设置)——MandatoryHardware——Radio Calibrated(遥控校准)——点击窗口右边的校准遥控按钮file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/T emp/msohtm l1/02/clip_image010.jpg点击校准遥控后会依次弹出两个提醒:分别是确认你遥控发射端已经打开and接收机已经通电连接,确认你的电机没有通电(这点非常重要,做这步工作的时候建议你的APM只连接USB和接收机两个设备)file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/T emp/msohtm l1/02/clip_image012.jpgfile:///C:/DOCUME~1/ADMINI~1/LOCA LS~1/Temp/msohtml1/02/clip_image014.jpg然后点击OK开始拨动遥控开关,使每个通道的红色提示条移动到上下限的位置最后点击CLICK WHEN DONE 保存当每个通道的红色指示条移动到上下限位置的时候,点击Click when Done保存校准时候,弹出两个OK窗口后完成遥控器的校准。
APM中文使用手册Word版
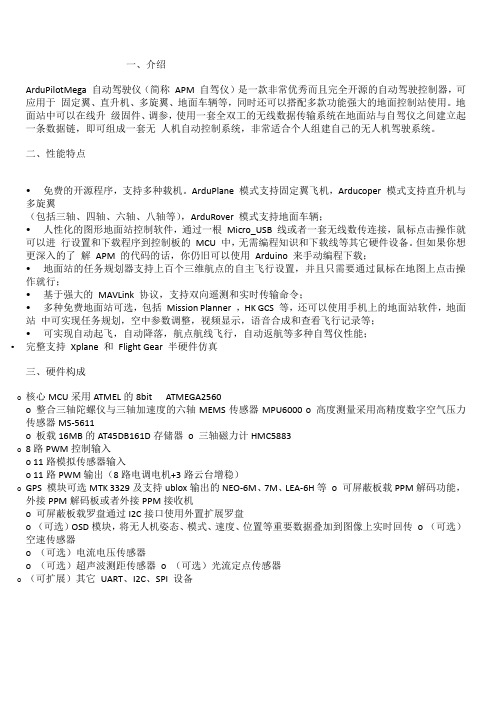
一、介绍ArduPilotMega 自动驾驶仪(简称APM 自驾仪)是一款非常优秀而且完全开源的自动驾驶控制器,可应用于固定翼、直升机、多旋翼、地面车辆等,同时还可以搭配多款功能强大的地面控制站使用。
地面站中可以在线升级固件、调参,使用一套全双工的无线数据传输系统在地面站与自驾仪之间建立起一条数据链,即可组成一套无人机自动控制系统,非常适合个人组建自己的无人机驾驶系统。
二、性能特点•免费的开源程序,支持多种载机。
ArduPlane 模式支持固定翼飞机,Arducoper 模式支持直升机与多旋翼(包括三轴、四轴、六轴、八轴等),ArduRover 模式支持地面车辆;•人性化的图形地面站控制软件,通过一根Micro_USB 线或者一套无线数传连接,鼠标点击操作就可以进行设置和下载程序到控制板的MCU 中,无需编程知识和下载线等其它硬件设备。
但如果你想更深入的了解APM 的代码的话,你仍旧可以使用Arduino 来手动编程下载;•地面站的任务规划器支持上百个三维航点的自主飞行设置,并且只需要通过鼠标在地图上点击操作就行;•基于强大的MAVLink 协议,支持双向遥测和实时传输命令;•多种免费地面站可选,包括Mission Planner ,HK GCS 等,还可以使用手机上的地面站软件,地面站中可实现任务规划,空中参数调整,视频显示,语音合成和查看飞行记录等;•可实现自动起飞,自动降落,航点航线飞行,自动返航等多种自驾仪性能;•完整支持Xplane 和Flight Gear 半硬件仿真三、硬件构成o核心MCU采用ATMEL的8bit ATMEGA2560o 整合三轴陀螺仪与三轴加速度的六轴MEMS传感器MPU6000 o 高度测量采用高精度数字空气压力传感器MS-5611o 板载16MB的AT45DB161D存储器o 三轴磁力计HMC5883o8路PWM控制输入o 11路模拟传感器输入o 11路PWM输出(8路电调电机+3路云台增稳)o GPS 模块可选MTK 3329及支持ublox输出的NEO-6M、7M、LEA-6H等o 可屏蔽板载PPM解码功能,外接PPM解码板或者外接PPM接收机o 可屏蔽板载罗盘通过I2C接口使用外置扩展罗盘o (可选)OSD模块,将无人机姿态、模式、速度、位置等重要数据叠加到图像上实时回传o (可选)空速传感器o (可选)电流电压传感器o (可选)超声波测距传感器o (可选)光流定点传感器o(可扩展)其它UART、I2C、SPI 设备四、硬件方框图五、飞控板概览正面图1、数传接口2、模拟传感器接口3、增稳云台输出接口4、ATMEGA2560 SPI 在线编程接口(可用于光流传感器)5、USB 接口6、遥控输入7、功能选择跳线8、GPS 接口9、I2C 外接罗盘接口10、ATMEGA32U2 SPI 在线编程接口11、多功能可配置MUX 接口(默认为OSD 输出)12、电流电压接口13、电调供电选择跳线14、电调输出接口背面图1、SPI 的MISO 电压选择2、PPM 输入选择3、MUX 接口功能选择六、硬件安装在APM 主板拿到手后,首先应明确自己的用途,并且熟悉了上述功能和接口再进行后续的硬件安装和连接。
APM_2_5_Arducopter_Guide_v1_4-1

Title: APM 2.5 & Arduflyer V2.5 - Guide for ArduCopter & MultiRotor’sDocument Name: APM 2.5 / Arduflyer V2.5 GuideVersion: V1.4Date: 18th Feb 2013Author: Jumpy07Please Read: This guide is written for the APM 2.5 and the Arduflyer V2.5 board by RcTimer, used in conjunction with ArduCopter.The guide details common hardware and software configurations to enable new users of the platform to get up and running with minimal effort. The guide is not intended to cover every conceivable aspect but focuses on the more popular uses and configurations. You should ensure you follow any relevant local legislation and guidelinesMost of this information can be found on various forums and wiki’s, and links to relevant sources and credits have been given where relevant.Latest versions of this file can always be found at: Disclaimer: You use this guide and information contained at your own risk. The guide is offered subject to errors and omissions and it is assumed that you have basic level understanding of MultiRotor’s and electronics.V1.0 - First releaseV1.1 –Amended motor layouts.Added version history.Added CLI Test section.V1.2 Updated GPS wiring information.Added I/O diagram from Eagle Files.V1.3 Fixed error in Attopilot pins.Added details of new APM 2.5 Power Board.Updated GPS info.Updated MinimOSD V1.0 wiring information.Updated pin out diagram to include Power Port. V1.4 PPM SUM details updatedATMega32U2 firmware details added.Updated APM Power moduleVibration issuesDiode / Fuse problemsMinor typos and updatesVersion History (3)Hardware (5)Connections (6)Board Layout (10)Installing Arducopter / Firmware (11)Status LED’s (12)Mission Planner (13)Power considerations (14)GPS (15)PPM SUM / CPPM (19)PPM ENCODER / Atmega32U2 (20)Sonar / Ultrasonic / Optical Flow (21)3DR Radio’s (24)MinimOSD (27)JD-IO Board / FrSky Telemetry (29)Buzzer (32)AttoPilot / APM Power Board (33)CLI / Testing (36)Diode / Fuse problems (36)Mounting flight controller board (38)First Tests (39)Tuning PIDS (39)Appendix - Motor Connections (40)Sources & Credits (41)Accessories & Supplies (42)The ArduPilot Mega 2.5 is a complete open source autopilot system, it allows the user to turn any MultiRotor capable of performing programmed GPS missions with waypoints. The OS / Firmware for the APM 2.5 for MultiRotor’s is Arducopter.Features:∙Arduino Compatible∙3-axis gyro, accelerometer and magnetometer, along with a high-performance barometer∙Onboard 4 MP Dataflash chip for automatic datalogging∙Digital compass powered by Honeywell's HMC5883L-TR chip, now included on the main board.∙Optional off-board GPS, (any TTL level GPS should work, main choice being the uBlox LEA-6H module).∙Invensense's 6 DoF Accelerometer/Gyro MPU-6000.∙Barometric pressure sensor, MS5611-01BA03, from Measurement Specialties.∙Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and USB functions. Datasheets:∙MPU-6000, Six-Axis (Gyro + Accelerometer) MEMS MotionTracking™.∙HMC5883L-TR, 3-Axis Digital Compass.∙LEA 6 GPS∙MS5611, MEAS High Resolution AltimeterDepending on where you purchase your board will have an effect what cables are supplied.As a minimum the board is normally supplied with the GPS and Telemetry cables, either as one ended to make your own connections, or plugs on both ends for 3DR radios and GPS.A0- Sonar/ UltrasonicA1- Voltage Sensor – Attopilot A2-Current Sensor – Attopilot A3- Optical Flow SensorA4-Motor LEDA5-Motor LED / BuzzerA6-Motor LEDA7-Motor LEDA8-Motor LED / Analogue RSSI A9-Camera ShutterA10-Camera RollA11-Camera PitchOP 1 – OP 8 – to ESC’s, (see motor mapping section)IN1 to IN 8 - from RXIN1 – Channel 1 Rx, RollIN2 – Channel 2 Rx, PitchIN3 – Channel 3 Rx, ThrottleIN4 – Channel 4 Rx, YawIN5 – Channel 5 RX, Flight Mode SwitchNote: IN5 – PPM SUM / CPPM input from RX – (See PPM SUM Section)Header Pins: Most boards are supplied without the header pins soldered to the board, this gives you the option of choosing straight or right angled headers. Soldering these although fiddly although not difficult, make sure you have a low wattage fine tipped soldering iron.Cases: Cases for the APM 2.5 will fit the Arduflyer V2.5 and vice versa.Important: You should cover your barometric sensor with a piece of foam and tape it to the board:Front BackThe APM 2.5 will normally come loaded with a boot loader. To update the board to the latest firmware this can be done within Mission Planner. To do this, connect the board with your USB cable to your PC. In most instances the drivers will auto install, if you have Windows 8, follow the guide at the end of this section. (Beta and pre-release versions of Arducopter will need to be loaded through Ardnuino).Once the drivers have installed then click on Firmware tab and update the firmware in the APM 2.5 by clicking on the relevant configuration. (Note if this fails then you will have to update via Arduino see this link /p/ardupilot-mega/wiki/Code )Windows 8 drivers installation:Windows 8 does not like unsigned drivers.. therefore many of the FC's and adapters that we use will not install automatically and trying to install the drivers will fail.. often without much indication of the reason..There is a work around that disables the driver signature enforcement... in Windows 7 youhad the option when you installed the device.. in Windows 8 it is enforced... so todisable... do the following..1. Click on the Windows Key + R2. Enter shutdown.exe /r /o /f /t 003. Click the "OK" button4. The System will then restart to a "Choose an option" screen5. Select "Troubleshoot" from "Choose an option" screen6. Select "Advanced options" from "Troubleshoot" screen7. Select "Windows Start-up Settings" from "Advanced options" screen8. Click "Restart" button9. System will restart to "Advanced Boot Options" screen10. Select "Disable Driver Signature Enforcement" (press number on keyboard foroption shown on screen)11. Once the system starts, install the APM / FTDI / Arduino drivers as you would onWindows 7The APM 2.5 has a number of status LED’s. the main ones being A,B and C, which are Green, Yellow and Red respectively. There is also a power good LED.APM Planner can be downloaded from here: /p/ardupilot-mega/downloads/listMission Planner is used to upload new firmware, for calibrating your APM 2.5 and checking and calibrating your radio.The Planner can also be used for following:∙Updating firmware∙Calibrating radio∙Calibrating horizontal and magnetic settings∙Setting up Attopilot Voltage and Current monitor∙Setting up Ultrasonic sensor∙Tuning PIDs (more on this later in the document)∙Setting flight modes∙Mission Planning∙Ground StationAnd much much more……. most of the settings are explanatory, but the Planner is quite powerful and can be used for full ground station work or setting up full autonomous flight.We suggest your refer to the Ardupilot Mega Wiki Guide here/p/ardupilot-mega/wiki/MissionThe power jumper JP1 when present connects the power from the ESC’s +5v rail to the +5v power rail on the Inputs.When JP1 is connected the board is powered from the Output Rail. When testing you will probably be powering the board via your USB cable while you set it up.On the MultiRotor you will need to power the board with your LiPo battery going through one of your ESC’s with JP1 present. If JP1 is removed then you can power the board with a suitable UBEC connected to one of the input 5v pins.If you have noisy ESC’s then powering the board and sensors via a separate UBEC or new APM Power Module may be a more preferable option.The APM 2.5 itself draws very little power, typically 200ma.Warning: Do not exceed 6.0V DC of power supply input voltage or you will damage your board.Almost any TTL GPS units will work with the APM 2.5. The GPS connects to either the old style GPS port or the new style GPS port depending on what cables you have. The APM 2.5 in Arducopter tries to configure the GPS in the first instance on boot. If this does not work, then you may have to change the baud rate in Arducopter using Arduino, or the baud rate of the GPS if it has an onboard EEPROM. The default baud rate for the GPS port is 38400 baud.LEA 6A cable is available to connect the LEA 6 to the APM 2.5 with ready made ends. Rctimersupplies this cable with all new boards as from Nov 2012. (cables are also available fromsources at the end of this guide).A special configuration TXT file is available from 3DR to optimise the LEA 6 for MultiRotoruse.To enable you to upload the config file to the GPS you will need an FTDI adapter and make a suitable cable to connect to the LEA 6.Download the 3DR config from here : http://ardupilot-/git/libraries/AP_GPS/config/3DR-Ublox.txtYou will need a copy of UCentre which you can download from here: http://www.u-/images/Support/Support_Products/EvaluationSoftware/u-centersetup-7.0.2.1.zipTo upload the text file to the GPS you can do this from the MENU.. as shown below:You then hit "Send to GPS", you will get some errors, and eventually it will complete, then go back into U-Centre and make sure you save the config in the configuration view to EEPROM. Note: The baud rate will now have been changed to 38400.After this has been done, you will no longer see information on number of Sats etc, butshould see a position fix.You can now connect the GPS to the APM 2.5The config turns off a lot of GPS sentences that are not required to minimise the overhead on the APM. It also optimises the GPS for the APM and changes refresh rate, baud rate, lock refresh etc.Please note if you load this file onto your GPS then it may not work with other non APMFC’s until you have reset it.The original APM 2.5 from RcTimer came with two cables with plugs with bare ends…. theyare both the same, the GPS plugs into the "New Style GPS" port on the APM 2.5.The latest RCtimer APM 2.5 from Nov 2012, comes with plugs on both ends of the cables and you will either need to cut this to add your FTDI adapter or source an additional cable.(Sources for these are shown at the end of the guide).Now power your APM by the USB socket and the red light on the GPS should light up, theblue status light on the APM will flash and then go solid when it has a 3D fix, you may notice in Mission Planner that you will get a location fix before it says fix in the HUD as the HUD will only say fix when it has a 3D fix, whereas the Google map will show a location when it has a2D fix.Neo 6 V1The NEO 6 V1 has now been replaced with the V2, however the original GPS will work withthe APM 2.5 with a suitable cable. The main issue with the V1 is that it had a small batteryand no EEPROM for saving settings. Therefore after a few days the GPS would do a cold start taking longer to get a fix,Neo 6 V2This is normally the GPS supplied by Rctimer in its latest Arduflyer V2.5 & GPS bundles, theGPS should be plug and play with the latest cables supplied. You should not need to changeany settings on the GPS.The V2 NEO 6 has very similar performance to the V1 but has the added advantage of having an external EEPROM for saving settings and a large antenna. It also has a slightly largerbattery saving current position for quicker warm starts. The Neo 6 V2 offers very good price performance.The 3DR TXT file config although written for the LEA-6 can be used on the NEO 6, althoughsome errors are reported the file works in much the same way.MediaTek MT3329 V2.0This is normally the GPS supplied by 3DR at this time for the APM 2.5. The new MediaTekMT3329 GPS unit has custom firmware which allows the unit to output an efficient and very compressed binary protocol. (This firmware will only work with the ArduPilot MegaAutoPilots). By default the baud rate set to 38400 bps and custom binary protocol.There are two methods of configuring the board for PPM SUM / CPPM. Some people have reported that method 1 works fine in most instances, but if you are having problems then Method 2 should be employed.Method 1:Link the signal pins on channels 2 & 3 and use channel 1 as PPM SUM input.Method 2:On the APM 2.5, if you look with a magnifier you will see the little trace between the <-PPM and -> PPM pads. You need to cut this and then solder the ->PPM and <-CH5 pads together. You then connect your PPM SUM / CPPM receiver then connects to IN5 / Channel 5.Note: It is recommended that you do a manual ESC calibration when using PPM Sum / CPPM.There has been much debate about the PPM Encoder firmware on Rcgroups with reference to the Arduflyer V2.5 board.Early boards were not installed with the latest firmware in the Atmega32U2. This made it difficult to update the firmware in the Atmega32U2, this has since been rectified in latest boards made from Jan 2013 on wards.No upgrade of the Atmega32U should be necessary unless you have a Futaba receiver, which is known to have problems with some versions of the firmware.A very useful thread on the subject including effected receivers can be found here:/forum/topics/is-it-necessary-to-update-flash-the-atmega32u2-ppm-encoder-on-an?id=705844%3ATopic%3A1069690&page=3#comments/p/ardupilot-mega/wiki/EncoderThe APM 2.5 is NOT compatible with the cheap HC-SR04 ultrasonic sensors as used on many other Flight Controllers.APM 2.5 supports the MaxSonar sensors for low altitude hold, typically the sensor works below 10 metres and above 10 metres the barometric sensor is used. The MaxSonar sensors are far superior to the HC-SR04 sensors.The Sonar sensor most commonly used on the APM 2.5 is the MB1000 LV-MaxSonar-EZ0 High Performance Ultrasonic Range Finder. The LV-EZ0 and the higher performance XL-EZl0 are also supported by the APM 2.5.∙Resolution of 1 inch∙20Hz reading rate∙42kHz Ultrasonic sensor measures distance to objects∙Virtually no sensor dead zone, objects closer than 6 inches range as 6 inches∙Maximum Range of 254 inches (645 cm)∙Operates from 2.5-5.5V∙Low 2.0mA average current requirement∙Small, lightweight module∙Designed for easy integration into your project or product∙Widest beam of the LV-MaxSonar-EZ sensorsThe sensor requires only three connections to the APM 2.5, 5V, Ground and signal from AN on the sensor to the signal pin of A0 as shown in the diagram below. The sensor comes without a cable connected and you will have to solder your own connections.Datasheet: /documents/MB1000_Datasheet.pdfOnce you have connected the sonar sensor then you have to enable it in Mission Planner as shown below. Once enabled you can test the sensor in the terminal view > Test > Sonar.Optical Flow SensorTo improve position hold an optical flow sensor is supported, the sensor is essentially a small camera with a fixed lens.Input for the sensor in the APM 2.5 is A3.Support for this was released for the APM 2.5 in version 2.8+ of ArduCopter. A special flight mode OF_LOITER is available to enable the sensor.There are a number of known limitations and issues you should be aware of:¶•T he sensor does not work well in dull lighting environments•A fixed-focus lens is used meaning it cannot focus on objects closer than 30cm.•Rotating the sensor will confuse the sensorI do not intent to detail any more in the guide as I believe it has a limited application, but if you wish to find out more about the Optical flow sensor see this link:/p/arducopter/wiki/AC2_OptFlow.3DR Radios will work for Ground Station Support and connection to APM Planner. There are currently two frequencies available 900Mhz and 433Mhz and you should choose the one that meets your countries regulations. 433 Mhz is recommend for UK and Europe.The 3DR Radios connect to the telemetry port on the APM 2.5, some of the clone radios now appearing on the market have different connections from shown above, the units currently supplied by Rctimer in their latest bundles have a socket similar to the GPS. The cable supplied by Rctimer as part of their bundle offer makes the radios wiring plug and play. If you source your radios elsewhere or use genuine radios then you will need to make a suitable cable.The 3DR radios consist of a Remote and Local unit, the Local Unit is the USB one and the Remote is the smaller module.Before you can use the modules they will need configured, to do so you will need to plug the USB one into your PC and the remote one will need powered by 5V + and Ground connection from the Crius.Remember and connect the antennas first as not doing so will damage the modules.Plugging the USB local module into your PC should auto install the drivers and a comm port will be configured automatically. If ensure check your ports in Devices. (Control Panel > System > Devices). If you need drivers they can be found here /Drivers/D2XX.htmThere are two ways to configure the modules, either using APM Planner or the 3DR tool available. The 3DR tool can be found here http://vps.oborne.me/3drradioconfig.zipThe First step is to configure the baud rate of both devices, then the 3DR’s should be set at 57600 baud. Most 3DR’s are set up as default at 57,600 so to connect first time try this first.If you have changed the baud rate the and saved the baud rate on the local and remote you will need to reconnect at the new baud rate.Caution: Make sure you change the settings for both remote and local at the same time. If the two are not the same you will not be able to connect to the remote. If you do change the settings and get them out of sync, all is not lost but you will need an FTDi adapter to change the settings on the smaller module.Set TX power to 20 (which is equal to 100mw)The picture below shows the settings for a 433Mhz 3DR radio set in Mission Planner connected to COM13You should ensure that your radio’s, frequency and settings etc are setup legally for the country of operation. For more info see below:3DR Status LEDs¶The 3DR Radios have 2 status LEDs, one red and one green. The meaning of the different LED states is as follows:•green LED blinking - searching for another radio•green LED solid - link is established with another radio•red LED flashing - transmitting data•red LED solid - in firmware update modeMinimOSD connects to the Telemetry port, only the RX from the OSD is connected to the TX of the Telemetry port if you also have 3DR Radios connected as well.If you are not using telemetry then connect the TX and RX.Only one device can be a talker on the port at time.If you are using an early V0.1 board or one of the Chineese clones based upon its design, (Which maybe labelled as V1.0), then here is a well know design flaw on the MinimOSD and its recommended that you do not follow the guide on the Wiki as shown below:Instead the OSD should be connected as show:Note: Diagram above assumes a 12v camera.If you are using a new version V1.0 of the MinimOSD then follow the Wiki as standard:/p/arducam-osd/wiki/minimosdAnalogue RSSI is normally handled by the APM 2. 5 and passed over Mavlink to the MinimOSD. Analogue RSSi can be input on pin A8 and should not exceed 3.3v. To enable the APM to work with RSSI input on A8 then LED’s need to be disabled on this input.The APM 2.5 cannot process PWM RSSI as output by some RX’s such as FrSky. Therefore an alternative way is to modify the MinimOSD to provide an input for the OSD and use an alternative software on the MinimOSD.To date ONLY PWM RSSI as output from FrSKY Telemetry Receivers has been found to work.To work with MinimOSD and a PWM RSSI input, an alternative version of the MinimOSD is available here /p/minimosd-extra/ . You will need to configure and install as detailed in the link. (If you do not require RSSI then the standard OS Build for the MinimOSD will be fine). To configure the OSD you will need an FTDI adapter to load and configure the firmware.Note as standard MinimOSD’s baud rate is 57600 which is the default setting the Telemetry port on the APM 2.5.For more info on MinimOSD see here /p/arducam-osd/wiki/minimosdLED DrivingThe JD-IO Driver Boards is great if you need to drive LED strips, LEDs, Lamps, Relays or similar devices. This board is fully Arduino compatible and has 6 high power outputs and can handle up to 42 Volts and 500mA / output pin. For more information see this guide/jDoc/wiki:code_ioboardFrSky TelemetryThe JD-IO takes the Mavlink data and converts it into FrSky telemetry format that you can then input into the FrSky telemetry series RX’s on the telemetry serial port.The FrSky telemetry receiver then sends the data via the radio link to your FrSky 2.4Ghz telemetry Tx’s such as the DHT-U module, LCD display connected to a DHT or telemetry modified receiver with DHT and ER9X.The JD-IO is still being developed, but at the moment current messages that are already working over FrSky telemetry are:- Temperature- Accel X, Y, Z- Running time- Altitude- Groundspeed- Lat / LonFor more info on the JD-IO Board see this link: /JD-IO-board-v1-0-Driver-board-p/acq-ioboard.htmMavlink out is found on the Telemetry port, only the TX on the APM 2.5 needs connected to the JD-IO board.It is possible to connect a Piezo buzzer to indicate arming, disarming and low voltage on the APM 2.5. This can be connected between Pin A5 and using a 1k resistor to ground.An alternative and safer connection can be made using a NPN transistor to protect the APM 2.5 output on Pin A5 as shown below:You can also buy suitable buzzer and ready made circuits on Ebay.APM 2.5 is capable of measuring Voltage and Current by using the Mini Attopilot Module or by using the new APM Power Module.AttopilotArduCopter is already configured for using the Attopilot on Pins A1 and A2There are a number of Attopilot modules available in various current sizes, please pick onethat suitable for the load on your MultiRotor.This data is also passed onto Mavlink and can be viewed in Mission Planner and MinimOSD if configured.∙V-Pin of the Attopilot connected to the A1 pin of the APM 2.5 board∙I-Pin of the Attopilot connected to the A2 Pin of the APM 2.5 board∙GND of Attopilot to Ground on APM 2.5 board∙IN+ from battery∙Out + to ESC, BEC’s etc∙Heavy Ground to BatteryAttopilotAPM Power ModuleThe new APM Power module launched in late Nov 2012 provides power to the APM boardand also Voltage and Current measurement.The new module plugs into what was previously known as the mystery port or power port. It is available with XT60 or deans connectors. It is a simple way of providing the APM 2.5 with clean power from a LiPo battery as well as monitoring current consumption and battery voltage measurements.A 6-pos cable plugs in the power port on the APM and an inline battery connector to your LIPO. This will ensure that you have no brown-outs due to insufficient BEC power from your ESCs, and makes current and voltage monitoring easy.If you are using this board then you need to remove the jumper from JP1. This will isolate the power supplied f rom the BEC in the ESC’s from the output rail.The power module’s maximum load is recommended at 2 amps max, it is not intended to power servo etc.Both the Attopilot and Power Module can be configured in Mission Planner.Mission Planner has a very useful and powerful testing interface which can be found in the terminal window. Terminal / CLI only works over USB only.∙Plug in your APM to your PC with the USB cable∙Connect to the relevant comm port.∙Click on terminal on the top menu,∙Click on “Tests”∙Type “help” and hit return for a full list of test available.The tests are useful to check your GPS and motor configurations.A common problem on the APM 2.5 and Arduflyer V2.5 can be blown fuses or diodes on the input rail. This is caused normally by shorting out the 5v rail, or by spikes plugging cables in while live.In most instances this can be repaired, the components are shown in the picture below. It is important these are replaced with the correct parts as incorrect ones can cause irreparable damage to the board.A member at Multi-Rotor is offering a repair service for this if you are not confident on soldering and repairing these components. For more information and pricing Contact: gaza07@From Arducopter 2.9+ mounting of the flight controller board has become critical. The board needs to be mounted in a way that it is isolated from vibrations as best as possible. It is also important that propellers are balanced and that the frame is made as vibration free as possible. This is due to 2.9+ and use of inertial primary control for the Z axis, it is now necessary to take vibration dampening and isolation of the flight control board much more seriously.There are many ways to achieve this:∙Suspended on elastic bands between four posts∙Gel Pads∙Foam strips∙Rubber bobbinsThe effectiveness of the damping can be seen in the data logs from the APM after flight.For more information on damping please see this excellent thread:/forums/showthread.php?4251-Vibration-Dampening-amp-Isolation-Solutions-Guide DO NOT HARD MOUNT THE ARDUFLYER OR APM 2.5 TO THE MULTI CHASSISSee this great tutorial, should tell you how to get started./files/APM2_Quad_Setup_3.pdfAnother great guide and tutorial to PID tuning for APM/files/APM2_Quad_Stabilize_1.pdfPID FAQ for Arducopter 2.9.1+ http://www.multi-/index.php?topic=1385.msg11119;topicseen#newFor other layouts see: /p/arducopter/wiki/APM2_Motor_orderArduCopter /p/arducopter/Mission Planner /p/ardupilot-mega/wiki/MissionMinimOSD /p/arducam-osd/wiki/minimosdJD-IO /JD-IO-board-v1-0-Driver-board-p/acq-ioboard.htmMulti Rotor UK Forum members All the community on DIYDrones.. /And of course all of the people on RCGroups community….Current Forum Threads on APM 2.5:/forums/showthread.php?t=1820773/index.php/topic,597.0.html/forums/showthread.php?t=1752761APM 2.5/APM_2_5_Kit_p/br-ardupilotmega-05.htm/ArduPilot-Mega-2-5-Kit-p/apm-2.5.htm/index.php?gOo=goods_search_list.dwt&gcat=0&gkey=apm &image.x=0&image.y=0Ready Made Cables for APM, (GPS and Telemetry)/Cables-Connectors-s/42.htm/telemetry-adapter-cable-for-apm-2-5-radio-osd-209.htmlCases/ArduPilot-Mega-s/36.htmSonar Sensors/IMU-Sensors-s/25.htm/uav-components/uav-telemetry.html3DR Radios/uav-components/ardupilot-mega-uk/3dr-433mhz-telemetry-kit.html/view/120961/Single-TTL-3DRobotics-3DR-Radio-Telemetry-Kit-433Mhz-for-APM-APM2.htmGPS/uav-components/ardupilot-mega-uk/ublox-lea-6h-gps.html/3DR-GPS-LEA-6-p/gps-3drgpslea.htm/index.php?gOo=goods_details.dwt&goodsid=763&productn ame=。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
APM2 中文快速入门指南-第一篇硬件和常用软件ArduPilotMega(APM)是市面上最强大的基于惯性导航的开源自驾仪(并且是最便宜的之一!)
特性包括:
∙免费开源固件,支持飞机(“ArduPlane”),多旋翼(四旋翼,六旋翼,八旋翼,十旋翼等),直升机(“ArduCopter”)和地面车辆(“ArduRover”)!
∙通过点击式程序简化设置和固件上传。
无需编程
∙通过点击式的桌面程序完整支持任务脚本规划
∙可以支持上百个三维航点
∙使用强大的MAVLink协议,支持双向遥测站和飞行中任务设置
∙多种免费地面站,包括APM PLANNER ,HK HCS,
∙跨平台,支持在Windows,Mac,甚至手机安卓系统,和Linux。
在Windows下使用图形任务规划设定工具(苹果下可用模拟器)。
Arduino的编程环境,也是完全跨平台的。
∙自动起飞,降落和特殊动作命令,例如视频和照相控制
∙完整支持Xplane和Flight Gear 半硬件仿真
∙包括继电器,可以根据任务脚本控制触发任何设备,
∙硬件包括:
o三轴陀螺仪
o三轴加速度计
o输出数字化6轴或9轴融合数据,包括旋转矩阵、四元数、欧拉角和原始数据格式
o三轴角速度传感器(陀螺仪),感度高至131 LSBs/dps量程±250, ±500, ±1000, 和±2000dps
o三轴加速度计,可编程量程±2g, ±4g, ±8g 和±16g
o测量高度的空气压力传感器
o10Hz的GPS模块
o监视电池状态的电压传感器
o16MB板上数据记录存储器,日后会支持TF卡扩展。
任务数据自动记录,并可以导出为KML的格式
o三轴磁力计
o(可选)空速传感器
o(可选)电流传感器
APM对于玩家的要求
较深的航模知识
玩飞控的想法符合实际
有一定的电子基础
略懂英文及编程
APM1和APM2的差别
APM1和APM2之间的主要差别在传感器。
AMP 2拥有先进的InvenSense的MCU-6000
由于芯片技术的提高,我们已经能够把更多的功能集成到更少的芯片,包括USB接口/ PPM编码器,切换到数字的传感器,省略了APM 1 的模拟-数字转换器芯片。
更少的芯片意味着更小,更便宜,东西少出问题。
如果你已经有了APM1板,你也会注意到几个外部的差异,主要是旨在使电路板上更小,更可靠:
∙原外部的传感器,如全球定位系统和磁力计,现已内置,无需焊接或电缆!
∙没有的CLI(命令行解释器)开关。
如果需要的话,CLI的现在是在软件大全- 宜配网调用(启动时在终端输入“回车”三次)。
∙没有拨码开关。
所有的拨码开关功能(通道逆转,设置舵面模式)现在都由任务规划器软件处理。
∙没有内置的稳压电源。
你必须透过USB接口(替补)或飞机上的电调(通过ArduCopter配电板)通过APM2的输出引脚供电。
∙电流传感器,可插入到一个传感器的插座上。
硬件技术参数如下:
六轴数字传感器MPU6000
三轴数字磁阻5883L
数字气压计MS5611
10HZ MTK3329GPS
16M TF CARD
11路模拟输入端(每一路都带ADC转换)
11路PWM输出
8路PWM输入
1路PPM输入
3路UART可接数传GPS OSD扩展
拥有目前开源项目上最完善的直升机固定翼多旋翼车船软件
系统构成
1.APM2主板
2.GPS(推荐mtk3329或者UBLOX LEA-5H,其他nmea GPS无法识别,需要改动代码)3.5路以上的遥控系统,推荐8通
4.数传遥测系统,推荐xbee pro900,或者空中速率可以达到57600的数传
5.载机(直升机固定翼多旋翼车或船)
首次安装
如果是未焊接套件,需要把他焊接起来
基本常用的接口,焊接如下图既可
最后把上板焊接上
小贴士:实际上面的小板只需要焊接2个插针(红色圈住),即可供电,方便以后更换不带GPS的小板或者带GPS 的小板
供电方式
国内的玩家如果是从cuav淘宝店订购的,均会有一个UEBC模块,可以用他来进行供电和电压检测
需要把接入电容焊接上,并自行焊接供电插头线然后接入APM2
请小心插,勿插反插错。
否则后果很严重哦
其他供电方式
电调供电,如果只是拿来飞多旋翼,而不需要电压检测,可以用电调进行供电,这样简单方便
把跳线帽插上,既可使用PWM输入口进行供电
请注意,一定要用万用表测量你的电调或者EBC输出电压为5V,才可以接入apm进行供电,否则可能会烧毁APM
与遥控设备连接
连接你的遥控设备
小贴士:不需要外部供电,USB供电即可带动接收机,但是与舵机输出口供电是隔离的。
要把你的遥控飞机转变成无人机,实际上只需将自动驾驶仪放入遥控接收器及飞行伺服机之间,这么一来自动驾驶仪就可以完全控制你的飞行器。
你需要下列几种设备:
∙至少5动的遥控器,建议7动以上。
∙每个频道需使用母对母接头的连接线,这个会是不错的选择。
∙电源:飞行器的ESC、仪表、电池状态、BEC,APM。
输入端
依上图所示将遥控器使用母对母连接线接到APM2的输入端,想让APM2控制的每个频道都需要连接。
一般而言,APM2的模式开关(Input 8)通常会分配给RC发射器的3段拨动开关(大多数人为channel 5)。
无论是直线或直角连接器,地线应该都在板子边縁的外侧,如下图所
示:
备注:RC接收器的前两个通道也支持副翼组,你可以透过Mission Planner的设定程序告诉APM如何操作各个副翼的动作。
输出端
将伺服机及所有需要APM控制的设备接到输出端,如下图所示:四动遥控器的设定
∙ 1. aileron
∙ 2. elevator
∙ 3. throttle
∙ 4. rudder
副翼设定
∙ 1. starboard (right) elevon
∙ 2. port (left) elevon
∙ 3. throttle
安装到你的飞行器
使用正确的方法把APM放到你的飞行器很重要。
GPS连接器要面向前方,伺服机连接器向后,控制板的右侧向上,IMU 则放控制板的上方。
如图所示(备注:以防万一有个小箭头在板子的下方指出前方的方向):
当APM放到你的飞行器时请确认它安装是否牢固不可在机体内晃动,这点相当重要,并且尽可能的与飞行方向保持水平状态。
理想的情况下,接近重心位置(振动会减至最小)并固定于一个稳定的平台。
安装APM PLANNER地面站软件
第一步:安装APM 2的USB驱动程序
下载驱动
/p/ardupilot-mega/downloads/detail?name=Arduino%20MEGA%202560.inf&can=2&q=%22
我们把他下载到一个容易找到的文件夹
把APM2插上电脑后,就会提示
但是实际会找不到驱动,
没有关系,我们需要手动安装在桌面,对着我的电脑点击右键打开设备管理器
对着他点击右键,更新驱动程序软件
下一步
再定点下一步
点从磁盘浏览安装
浏览
找到你刚刚下载的驱动文件
点打开
下一步
点是
始终安装
就安装完成了,请记住后面的串口号COM**
第二步:下载APM MP任务规划器
/p/ardupilot-mega/downloads/list
可以下载安装包
32位和64位,请按需选择
安装过程不再讲述,很简单
打开后的界面
从左到右功能如下
遥测数据–任务规划–配置PID和设置–模拟器–固件升级– CLI命令窗口–帮助和升级地面
第三步,下载你需要的载机固件
如果你已经将你的APM的接上串行端口的号码会显示在任务计划的右上角,请确认波特率为115200。
下载固件,不需要点CONNECT 直接选好串口号即可,请注意
图片很明白,需要什么固件,直接点图标即可
如果你想使用1.0的arduino,请一定要从这里下载专用版本
/p/ardupilot-mega/downloads/detail?name=arduino-0100-relax-window s.zip&can=2&q=
否则无法编译通过
常见问题是
默认情况
固件必须放在我的文档-arduino下面
库libraries文件夹,一定要放在我的文档-arduino 的根目录
Arduino主板硬件选择atmega 2560主板
如果出现莫名其妙的错误,请使用终极大法,arduino和固件都删掉,重新下载和放置,目录一定是不能有中文路径的。