IAI的软件使用(RCEC)
IAI样机操作手册

IAI 样 机 操 作 手 册南京三迪自动化设备有限公司 2013年11月25日1、样机准备:电缸、电缆、控制器、电源、通信线、装软件的电脑或者手编器,I/O电缆看情况而定2、演示前接线联机电源和控制器端子的连接马达电缆连接到控制器通信线缆连接到控制器和电脑控制器开关拨到MANU(带刹车的注意刹车的解除)3、确认接线正常后,开启电源首次使用的电缸,首先要找到端口,选择正确的端口才能连接(端口号在 计算机‐属性‐设备管理器里面)如果在客户电脑上用,第一次安装软件的时候,可能找不到端口,要注意安装驱动确认好端口号,按确定键后就可以进行连接:这样就显示连接上,然后会跳出以下页面示教模式1的最高速度是100mm/s, 示教模式2可以按照电缸参数标定的速度动作如果是脉冲型控制器,第一次用时会显示如下功能表:在这个页面下,先按伺服键,再按原点键,电缸的初始动作完成;可以按前进和后退键来进行电缸的动作。
JOG时候的速度可以进行调整。
当前位置是表示电缸的滑块所处的位置,在前进和后退的时候数值是实时变化的! (下表是操作后的页面情况)因为脉冲型控制器还有点位型的功能,可以通过25号参数来设置,数值从0‐5的定义如下表:打开参数‐编辑25号参数的初始值是6,可以改成0‐5(PIO模式见前表)每个脉冲值的设定:25号参数初值是6的时候是脉冲模式,可以根据你自己的需要来设定每个脉冲的距离(单位移动量):电子齿轮分子、分母分别是65、66号参数,编码器脉冲数是800,滚珠丝杠的导程根据电缸而定。
这一步在电脑里无法演示,客户用PLC来控制做的时候要能给客户介绍设定方法!25号参数设置成0(保存参数、重启控制器后),显示页面如下:伺服和原点按键确认后电缸完成原点动作,根据需要的数值输入到位置表格:保存数据后,按连续移动键,电缸就可以循环动作。
左边的键是单步动作键,右边是暂停键。
该位置数据表里的速度、加减速度是可以设定的,区域位置也可以设定,还有调压模式和增量模式等功能(参看控制器的操作手册) 点位型控制器有三种位置输入法:1、直接把位置数值写入位置数据表2、用JOG功能把滑块动作到相应的位置,然后按下位置写入键3、把伺服键OFF,拨动滑块,可以把当前位置写入位置数据表里的数值对应的是I/O线上的一个个端口,I/O线的端口功能如下:(详细功能需要参看PCON说明书)。
iai手持编程器rcme

6.3 各部分说明LCD最大为横向 16 字符/行、纵向2行的液晶显示。
可显示各类设定值的编辑及示教内容等。
② EMERGENCY STOP(急停按钮开关)本开关是按锁旋转复位的蘑菇形开关。
本开关与控制器的急停信号线串联,按下后将进入急停状态,并切断电机的供电。
(本开关为“常闭触点:b触点”)(*关于急停信号线及其状态,请另行参阅“控制器使用说明书”。
)解除急停状态时,将本开关的操作部位沿箭头方向转动。
注意 : 使用链路电缆连接多个轴的控制器时,EMERGENCY STOP仅对连接示教器的控 制器所在轴生效。
: 在 RCP2-CG(外接断路继电器型)、ERC、ERC2系列中,EMERGENCYSTOP 仅在外部设有急停回路时生效。
请务必仔细阅读控制器的使用说明书。
返回主画面显示简易示教器的操作中包括多层嵌套,通过本按键可以返回上一层(主画面)。
简易示教器处理结束及重新连接长按约 2.5 秒以上,切换至“开始/结束”画面,可以结束简易示教器的处理并重新进行轴连接。
使用数字键输入数值时,中途取消清除错误、警报发生错误时,会在显示画面的最下方显示错误提示信息,按本键可解除错误并清除提示信息。
用于选择模式、数据内容及更改位置No.。
定位列表的项目:在定位宽度等可以输入减号的区域中,初次按下此键则输入“-”(减号),在其他情况下则输入“.”(小数点)。
用于输入数值。
用于确定数据输入及模式选择。
7. 连接/断开控制器7.1 连接简易示教器①将简易示教器的电缆连接至控制器正面的主通信端口连接器上。
对于有 PORT 开关的控制器,务必将控制器的 PORT 开关拨至“OFF”一侧再进行连接。
关于主通信端口连接器和 PORT 开关的位置,请参阅使用的控制器使用说明书。
②下一步,请将有 PORT 开关的控制器的 PORT 开关拨至“ON”一侧。
7.2 断开简易示教器接下来,对于有 PORT 开关的控制器,应将控制器正面的 PORT 开关拨至 OFF 一侧,然后拔出简易示教器的连接器。
IAI安全说明书

安全指南1、在使用本产品之前,请仔细阅读本指南2、请遵照此指南,采取必要的措施确保设计和生产中产品的安全3、请确保本指南最终交付到用户手中* 未经批准不得使用、部分复制或完全复制本手册。
产品安全预防措施以下为产品使用过程中常见的预防措施:一、选型1、该产品不能在高安全水平要求环境中使用(在此环境下不能保证人的生命安全),因此产品在以下情况中不适用:(1)保障人生命安全的医疗设备;(2)用来运载、运输人的机械装置或者设备(公路、铁路、航空航天设施);(3)设备中重要的安全部分(安全装置等)。
2、不能在说明书以外的情况下进行使用,否则会缩短产品寿命。
3、不能在以下环境使用本产品(1)存在易燃气体、易燃物或易爆物的区域;(2)有潜在辐射的区域;(3)温湿度超出规定范围的区域;(4)阳光直射或大热源会增加辐射热的区域;(5)温度突变能导致产品收缩的区域;(6)存在腐蚀性气体(硫酸或者盐酸)的区域;(7)有大量灰尘、盐屑、铁沫的区域;(8)有直接震动或有冲击的区域。
4、如果产品在垂直方向上使用时,应选择带抱闸的型号,如果选择的产品不带抱闸,断电时,滑块部分可能会跌落,导致事故发生,比如使人受伤或工作平台损坏。
二、运输1、在设备较重时,应两人或两人以上共同搬运,或者使用类似起重机等设备进行搬运。
2、多人搬运产品时,要分清主次,相互间配合默契确保大家的人身安全。
3、当运输过程中,要考虑产品放置的位置、设备的重量、整体的平衡,应特别注意搬运过程中产品不得碰伤或跌落。
4、采用合理的传输方式进行运输。
起重机的传送设备有吊环螺栓或有装螺栓的孔。
按照每个型号相应的说明书进行相关操作。
1、不要踩在包装上或者坐在包装上;2、不要在包装上放任何可使其变形的重物3、当使用载重量在1吨及以上的起重机时,操作者必须要有专门的资格证书4、当用起重机或其它类似设备时,不要让其搬运的物体超过其载重量5、根据负载选择合适的挂勾,要考虑到挂勾的安全因素比如承载能力6、当负载挂在起重机上时不要站到负载上面7、不要把负载长时间挂在起重机上8、不要站在挂有负载的起重机下三、存储和防护注意事项:1、存储和防护的环境应符合安装环境。
2019年最新-工具软件IARC-CHECK的使用-PPT课件-精选文档

2019年4月
南京
软件的获得
软件可从如下网址下载:
cicams.ac/web/detail.aspx?nodeID=507
肿瘤登记工具软件(IARC/IACR Tools for Cancer Registries)可以免费使用
1-2
1-3
IARC/IACR Cancer Registries Tools
生殖器官,未特指),而非卵巢癌的C56 。
1-13
Tools——工具
1-14
IARCcrg Tools软件工具
IARC CHECK 程序
Check程序对登记的病例记录的变量分二步进行审核, 一 是检查变量是否完整并在编码范围内的有效性检查,二是 对不同变量之间是否合乎逻辑的一致性进行检查。
1-5
软件的运行
程序安装完毕后,在
windows 开 始 菜 单 ,
点
击
:
IARCcrgTools 运 行
程序。
1-6
Conversions——编码转换
1-7
肿瘤分类编码历史发展
以解剖学为主
以形态学为主
解剖学和形态学
ICD-6 1946
MOTNAC 1951
SNDO 1951,1961
ICD-7 1955 ICD-8 1965 ICD-9 1975 ICD-10 1992
ICD-O-1 (1976) to ICD-O-2 (1990) ICD-O Field Trial Edition (1988) to
ICD-O-2 (1990) ICD-O-2 (1990) to ICD-O-3 (2000) ICD-O-2 (1990) to ICD-9 (1975) ICD-O-2 (1990) to ICD-10 (1992) ICD-O-3 (2000) to ICD-10 (1992)
iai 规则

iai 规则IAI规则是指以人工智能为基础的一种规则系统。
IAI是Intelligent Artificial Intelligence的缩写,意为智能人工智能。
IAI规则是一种用于规范和指导人工智能行为的规则系统,能够帮助人工智能系统更好地理解和处理各种任务和问题。
IAI规则的核心思想是将人类的知识和经验转化为可执行的规则,以指导人工智能系统的决策和行为。
IAI规则包含了条件和结果两部分,条件部分描述了触发规则执行的条件,结果部分描述了规则执行的结果。
通过使用IAI规则,人工智能系统可以根据不同的条件做出相应的决策和行动。
IAI规则的优势在于其灵活性和可扩展性。
人工智能系统可以根据实际需求和场景定义和修改IAI规则,从而适应不同的任务和问题。
而且,IAI规则可以与其他技术和算法相结合,形成综合的人工智能系统。
IAI规则的应用范围非常广泛。
在智能交通领域,IAI规则可以用于交通信号灯的控制,根据不同的交通流量和需求调整信号灯的时间间隔,优化交通流动性。
在医疗领域,IAI规则可以用于辅助医生诊断和制定治疗方案,根据患者的症状和疾病特征推荐最佳的治疗方法。
在金融领域,IAI规则可以用于风险控制和投资决策,根据市场情况和投资者的需求制定合理的投资策略。
IAI规则的应用还面临一些挑战和限制。
首先,IAI规则的制定和维护需要大量的人力和时间成本。
其次,IAI规则可能存在冲突和歧义,需要通过合理的冲突解决机制和语义分析技术解决。
此外,IAI规则可能会受到数据质量和完整性的限制,需要对数据进行清洗和预处理,以提高规则的准确性和可靠性。
为了更好地应用IAI规则,需要进一步研究和发展相关技术和方法。
首先,需要研究规则的自动化生成和学习算法,以减少人工制定规则的工作量。
其次,需要研究规则的评估和优化方法,以提高规则的效果和性能。
此外,还需要加强IAI规则与其他人工智能技术的融合,形成更加综合和强大的人工智能系统。
IAI规则是一种基于人工智能的规则系统,可以帮助人工智能系统更好地理解和处理各种任务和问题。
IXIA测试仪使用手册

IXIA测试仪使用手册一、设备开机、关机(一)开机打开IXIA测试仪电源,等待设备启动完成,需将测试客户端IP设置为192.168.1.200,测试仪IP地址为192.168.1.100,开IxNetwork或IxLoad可连接测试仪表明设备完成开机。
(二)关机在运行中输入mstsc进入远程桌面,连接到计算机192.168.1.100,在运行中输入shutdown.exe -s -t 3让设备在3秒内关闭,让系统自动关闭。
二、二三层测试配置(IxNetwork)使用IxNetwork配置测试基本流程如下图所示。
(一)添加测试端口点击标题栏中的或Overview表页中的连接192.168.1.100测试板卡添加测试用端口然后点击OK键,完成测试端口添加。
(二)配置端口、协议启用测试端口Ping及ARP,如下图所示。
添加测试端口IP地址、网关,并使能端口,如下图所示,添加的网关地址需是实际存在的,可以是交换机的网关地址或测试端口对端IP地址。
(三)配置流量选择配置流量。
Type of Traffic选项可选择Raw、Ethernet/vlan、IPV4分别对应原始报文流(需手动编辑,用来打广播包流)、二层流、三层流(需配置IP地址及网关),Bi-Directional表示流是双向流。
1、IPV4(三层流)在设置好Type of Traffic、Traffic Mesh以及选择好端口后,点击添加Endpoint。
点击NEXT,在Packet/QoS、Flow Group Setup、Frame Setup、Rate Setup保持默认配置。
点击NEXT,进入Flow Tracking,选择Traffic Item选项。
点击NEXT,在后续Protocol Behaviors、Preview以及Validate中保持默认选项,同时检查配置的有效性。
2、RAW(二层或三层流,需手动编辑各个字段)——用来生成广播包及修改MAC地址可在已有字段中修改或通过左上角协议搜索添加所需修改的协议字段。
IAI控制器说明书
1.前言打招呼由我和我为你服务多谢您购买本公司产品。
SA系列产品使用容易.体积小,可以自在控制传动装置与周边设备。
除此之外,使用SEL语言还可实现简单的高度控制梦想。
请仔细详读『操作说明书』。
2.安全上的应注意事项请详读下列内容,充分留意安全对策。
本产品以自动化机械等的驱动零组件开发而成,因此在自动化机器驱动源的转矩或速度方面,有请勿超乎标准以外的限制。
为了防止发生事故,请严守下列事项。
并请务必参照「安全规则」。
1.本书没有记载的操作方法,原则上请以「不可操作」解释。
对於本书内容如有不明之处,请与本公司联络。
2.传动装置与控制器之间的配线,请务必使用指定之正品。
3.当机械在运动状态,或者可运动状态(打开控制器电源状态)时,请勿站立在机械的运动范围。
另外也请在周围设置栅栏,以防止外人接近机械。
4.执行机械之安装调整作业,或者维修检查作业时,请务必关闭控制器电源。
并请将「作业中」铭板放置在明显的场所。
另外,请勿缠绕电线,也避免插入来路不明的电源插座里。
5.当复数人同时作业时,必须采取一个对应方法,以确认彼此安全作业。
特别是不论开.关电源,或驱动.手动马达等移动轴的作业,都必须发出声音确定安全後再进行作业。
6.当使用者(客户)需要延长配线时,因错误配线有可能会导致错误动作,因此请充分检查配线後,并确认正确配线方式後再打开电源。
附录「安全规则」关於产业用自动装置安全的JIS规格----「产业用自动装置之安全通则」(JIS B8433)於1983年3月1日制定,另外由劳动省於同年7月1日修改一部分的「劳动安全卫生规则」,以实施产业用自动装置之定义或,安全对策等规则。
在此所介绍的是,参考「劳动安全卫生规则」之产业用自动装置安全对策上的重要规则。
●特别教育(第36条第31号,第32号)第36条第31号操纵装置及记忆装置(包含可变序列控制装置及固定序列控制装置。
),以记忆装置资讯为基础之操纵装置之伸缩.屈伸.上下移动.左右移动,或者旋转动作或复合动作等,均可自动执行之机械(除了研究开发中之其他劳动大臣所制定之装置以外。
艾比利认证计费产品快速入门手册
艾比利认证计费产品快速入门指南1概述 (2)2快速入门指南 (2)1概述本手册适用于艾比利认证计费产品。
支撑的宽带用户数能达到100万。
注意:由于艾比利产品更新较快,以下的截图可能是来自于不同的版本。
2快速入门指南步骤/方法:运营准备STEP-01:正式使用之前正式使用艾比利系统之前,请注意检查以下事项:●请确认机器系统时间正确,建议设置为系统自动同步。
系统时间不准可能会影响某些跟时间有关功能的正常使用。
●手册中黑体标注的注意事项,请仔细阅读。
●艾比利页面采用了统一框架,因此,大多数艾比利web页面的列表刷新都可以通过点击下图的“刷新”按钮完成:●关于支持分权分域的对象:产品、销售品、用户、BAS设备、操作员、工单、批次现金卡和批次帐号卡等。
●关于操作员的管理区域:操作员在创建的时候,可以指定管理范围,但他也只能看到覆盖区域内的对象,如销售品。
●关于浏览器缓存页面的问题举个例子,当没定义任何组织结构的时候,BAS的“新增”按钮是灰掉的,但我们添加组织结构之后,再回到【Radius管理】,发现BAS的“新增”仍然是灰掉的,原因就在于浏览器缓存了上次访问的内容,我们执行浏览器刷新(F5)操作之后,“新增”按钮已经可以点击了。
该问题在未定义产品之前,打开【销售品】页面也存在同样的问题。
浏览器缓存的另外一个影响就是网络。
我们点击【Radius管理】页面的【网卡管理】按钮,在成功修改网卡地址之后,我们可能会发现浏览器连不上web服务器。
原因很简单:网卡修改会重启Radius机器的网络,浏览器与web服务器的连接自然也断开了,但浏览器还缓存了连接信息。
解决办法:在新的浏览器窗口重新打开业务管理系统即可。
关于更新补丁之后清除google浏览器的缓存问题很多补丁会更改web页面,而google会缓存一些更新补丁前的web页面,因此,在打完补丁,进入艾比利的web管理页面后,建议按如下图片的指示进行缓存页面的清理:STEP-02:登录艾比利认业务管理系统艾比利产品在自动安装完成之后,第一个网卡的默认地址为192.168.0.2,请将网线连接到机器的对应网口,确保跟计费机器网络连通。
Ixia测试仪自动化创建流

Ixia测试仪手工与自动化创建流本篇的阅读对象是初学使用ixia的测试软件,也很多我也不是很了解的地方,欢迎大家一起交流学习,下面就我在工作中遇到的设置流,和编写脚本的过程,需要创建的流,进行说明--------------------by jake(QQ:491555821)2011-07-07一.手工创建:1.先说明几个常见的设置,速率设置,固定的报文数设置,如下图:2.设置接口的ip,mac地址,vlan tag等设置mac自己所需要的地址的话,在下面的mac选项里,自己可以手工设置。
3.设置各种报文:一般在这个页面里进行设置:设置arp报文,设置10.1.1.11的mac地址是0000.0000.0011,它的直连设备接口ip是10.1.1.1(即它的网关),设置如图,其中目标的mac地址不用填写设置普通的udp流:11.1.1.11---》10.0.0.3主机数递增10000个设置TCP流:11.1.1.11---》10.0.0.3主机数递增10000syn报文,前面的设置和udp一样,详细见上面,下图只是说明端口的设置设置ICM流:11.1.1.11---》10.0.0.3主机数递增10000syn报文,前面的设置和udp一样,详细见上面,下图只是说明端口的设置类型0、代码0:响应应答:我们要连接对方一个不存在的系统端口(端口号小于1024)时,将返回Type=3、Code=3的ICMP报文,它要告诉我们:“嘿,别连接了,我不在家的!”,常见的不可到达类型还有网络不可到达(Code=0)、主机不可到达(Code=1)、协议不可到达(Code=2)等类型8、代码0:响应请求:我们日常使用最多的ping,就是响应请求(Type=8)和应答(Type=0),一台主机向一个节点发送一个Type=8的ICMP报文,如果途中没有异常(例如被路由器丢弃、目标不回应ICMP或传输失败),则目标返回Type=0的ICMP报文,说明这台主机存在,更详细的tracert通过计算ICMP报文通过的节点来确定主机与目标之间的网络距离设置二层源地址,目的地址变化的报文:4.不能发送多条流,当我们设置多条流的时候,ixia条条的发,不能一起发,下面是设置一起发:勾选上即可5.当发现对应的ixia,抓包开关变暗的时候,即不能抓包的时候,设置如下:capture—》filter:6.偏移位设置设置目的端口,源端口目的变化的报文:vlan tag是2个字节36--正常偏移位---不加vlan tag38---源地址--不加vlan tag40-目的地址---不加vlan tag加了vlan tag:40目的端口变化,38是源地址变化的报文---这个在设置端口扫描攻击用到二脚本自动化部分:三种正常的TCP UDP ICMP报文:Ix_CreateStream_Tcp$SUT_PORT(0,1,2)-dma2-framesize90-rate100-saRepeatCounter 4-sa{000000001201}\-daRepeatCounter4-enable802dot1qTag vlanSingle-vlanID12-sourceIpAddr12.1.1.11 -sourceIpAddrMode0\-destIpAddr11.1.1.100-destIpAddrMode0-sourcePort1200-destPort1100 -numFrames10000-streamId1\-name"tcp_01_01"-synchronize true-da$ix_mac4创建tcp流,帧大小是90,tag12,速率100源地址12.1.1..11目的11.1.1.100源端口:1200目的端口1100Ix_CreateStream_Udp$ixia_port1-streamId1-numFrames5000-rate2000-sa{000000 001001}-daRepeatCounter4-da$ix_mac1\-enable802dot1qTag vlanSingle-vlanID1-sourceIpAddr10.0.0.2-destIpAddr30.0.0.2 -destIpAddrMode1-destIpAddrRepeatCount300\-framesize128-name"udp_01_01"-sourcePort1000-destPort2000创建tudp流,报文数5000,tag1,速率2000源地址10.0.0.2目的30.0.0.2,目的地址连续增加300个源端口1000,目的端口2000Ix_CreateStream_Icmp$ixia_port1-streamId1-dma2-framesize64-rate1000 -saRepeatCounter4-sa{000000001001}\-daRepeatCounter6-sourceIpAddr10.0.0.2-sourceIpAddrMode1-sourceIpAddrRepeatCount 500-destIpAddr30.0.0.2-daRepeatCounter4-da$ix_mac1\-enable802dot1qTag vlanSingle-vlanID1-destIpAddrMode0-destIpMask255.255.0.0-type8 -code0-id10000-sequence500-numFrames5000\-streamId1-name"icmp_01_01"创建icmp流,帧大小是64,tag1,速率1000源地址10.0.0.2目的30.0.0.2,icmp flood 攻击流详细的各个参数如下:#*-hsp""设置端口默认值#<hsp>设置端口#-write1(true)设置完后写入硬件#0(false)设置完后不写入硬件#-streamId1构造当前流所用的流ID,默认为1,必须依次递增#<1-255>流ID可用范围为1到255#-numFrames[int]发送报文的个数#-dma0(contPacket)连续发送当前报文流#1(contBurst)连续以burst方式发送当前报文流#2(stopStream)发送完该条流后端口停止发送#3(advance)发送完该条流后继续发其他流#4(gotoFirst)发送完该条流后继续发送第一条流#5(firstLoopCount)循环发送所有流的次数#-returnToId1#<1-255>当前流发送完后返回到指定流继续发送#-loopCount1#<int>循环次数(-dma firstLoopCount时)#-framesize<64-1518>发送正常报文的大小#<12-13312>发送报文的大小#-da{XX XX XX XX XX XX}发送报文的目的MAC #-sa{XX XX XX XX XX XX}发送报文的源MAC#-saRepeatCounter4(idle)源MAC不变#1(contIncrement)源MAC连续递增#2(decrement)源MAC递减-numSA 指定的次数#3(contDecrement)源MAC连续递减#0(increment)源MAC递增-numSA 指定的次数#5(ctrRandom)为每个报文随机一个源MAC#6(cpeMacAddress)用DUT的MAC填充#7(contJitterTestPattern)IETF802.3ae相关(10G模块适用)#8(contRandomTestPattern)IETF802.3ae相关(10G 模块适用)#-saStep1源MAC每次变化幅度,默认为1#[int]源MAC每次变化幅度#-daRepeatCounter6(daArp)用ARP响应报文的MAC填充#(其他同-saRepeatCounter)目的MAC的变化方式#-daStep1目的MAC每次变化幅度,默认为1#[int]目的MAC每次变化幅度#-numDA1目的MAC变化个数,默认为1#[int]目的MAC变化个数#-numSA1源MAC变化个数,默认为1#[int]源MAC变化个数#-frameType{XX XX}协议标记字段值#-vlanID<0-4095>报文所带的VID#-userPriority<0-7>报文中tag的用户优先级#-destMacAddr{XX XX XX XX XX XX}IP报文目的MAC地址#-fpsRate[int]指定每秒发送多少个报文,-rateMode必须制定到该模式,IfrateMode is set to streamRateModeFps,then use this value the desired frames per second. (default=148810)#-insertSignature1/0是否在报文中插入signature域#-enableInsertPgid1/0是否在报文中插入Packet group id#-signatureOffset[int]当signatureOffset由于字段增加或删除时需要传入该字段#-mpls[exp]mpls标签列表表达式#-rate[int]%以带宽百分比的速率发送#[int]fps以每秒多少个报文的速率发送#[int]bps以每秒多少比特的速率发送#-enable802dot1qTag vlanSingle在报文中加入单一的vlan标记#vlanStacked在报文中加入QinQ 的vlan标记#-vlans{[vlan exp]...}vlan标签列表表达式#-createInterface0不创建协议接口#1创建协议接口#-warnings1/0是否打印构造流时出现的警告信息(IxExplorer那边的构造流的warnings页面对应)三脚本中常用的函数,节约大量自己写函数时间:Dut_Config_Reload"dut1"11直接重启86Dut_Config_Reload"dut1"fwn1重启不保存,fwn是控制台Dut_Config_WriteReload"dut1"fwn1重启保存,fwn是控制台Dut_Config_CmdForPrompt配单个命令,并带所期望匹配到的提示符例如:测试有没有ping的通set Result[Dut_Config_CmdForPrompt"ping1.1.1.2"{!!!!!}1001fwn]Fw_Print_Log"预期结果:fw1可以ping通fw2卡"if{![regexp-nocase{!!!!!}$Result]==1}{set result"FAIL"set stepResult FAILFw_Print_Log"实测结果:不匹配规则"Fw_Print_Log"结果判断:FAIL"}else{Fw_Print_Log"实测结果:匹配规则"Fw_Print_Log"结果判断:PASS"}Judge_Show函数,只能对show的结果执行例如:1、Judge_Show-include{"vlan\s+10"}-exclude{vlan\s[0-9]+}2、Judge_Show-cmd"sho ip route"-include{"o+e2+2.2.2.0.+1.1.1.1[^\\n]+vlan+1"}3、set ip1.1.1.1;Judge_Show-include[list"ip+address+$ip"]4Judge_Show-cmd"show arp"-include{[^\\n]*1\.1\.1\.1[^\\n]*}-exclude {[0-9]+\.[0-9]+\.[0-9]+\.[0-9]+}判断回显有没有:Primary--Failover activeif{[Judge_Show-cmd"show failover"-include"{Primary--Failover active}"-cons fwn -printStepResult0-judgeId2]=="FAIL"}{set stepResult FAILFw_Print_Log"实测结果:不匹配规则"}else{set stepResult PASSFw_Print_Log"实测结果:匹配规则"}Dut_Judge_ConfigFail判断某个配置失败Dut_WaitKeyword在DUT上执行相关命令直到匹配到相应的字符Dut_ShowInfo"show arp"2011fwn直接执行,fwn是控制台Dut_ShowInfo"del config.text\ry"2011fwn直接执行,y直接输入。
iConfig软件用户手册说明书
图7.2.2.3 选择线上升级包示意图 选择升级包后,软件校验该升级包是否合法,显示设备对应的升级包信息,如图7.2.4所示,若提示“文 件类型不正确或者是空文件”,请检查文件内是否有内容,并确定选择的文件类型为.sgu或.zip,注:若 提示“请检查文件数据,或检查文件是否加密”,请检查文件是否加密;若提示“机型不匹配,请重新选 择升级包”,请检查选择的升级包和机型是否匹配(若zip包升级,当前设备需要满足zip包内所有sgu文 件才可升级);若提示“暂无可用设备”,请检查在“设备列表”页面检查是否有设备及设备是否在线;若 提示“端口忙碌”,请检查是否有其他软件占用此端口,端口有无松动或拔掉重插,重插后等待在5s
获取逆变器列表; 逆变器批量升级; 查看逆变器信息; 设置逆变器参数; 逆变器老化、信息统计; 导出逆变器故障录波; 导出逆变器历史数据; 逆变器参数批量设置; 定制化模板参数导出; 软件版本与自升级。
本文档使用 MinDoc 构建
-8-
系统要求
系统要求
系统要求
项目 系统 软件环境
推荐值 Win7&Win10 32&64bit系统以上 Framwork 4.6以上
本文档使用 MinDoc 构建
- 19 -
日志
日志
日志
本章节简要介绍了iConfig日志使用方法。
本文档使用 MinDoc 构建
- 20 -
打开文件
打开文件
打开文件
步骤1 点击“日志”- >“打开文件”,可查看当前时间日志,注:每次重新打开软件会根据当前时间新建日 志存放目录。
图6.1.1 打开文件页面示意图
图7.1.4 修改设备地址示意图 步骤5 选择指定设备,点击【删除】,删除设备列表界面选定设备,如图7.1.5所示。
IxExplorer使用方法小结

使用方法小结From IxExplorer™ User Guide(Version 1、0)刘凯波Feb、2013目录§1、什么就是IxExplorer .................................................................................................... - 1 -§2、搭建测试环境 ............................................................................................................. - 1 -§2、1、物理连接 ........................................................................................................... - 1 -§2、2、仪表加电启动 ................................................................................................... - 1 -§2、3、记下仪表的IP地址 .......................................................................................... - 1 -§2、4、启动IxExplorer客户端并接入仪表................................................................. - 2 -§3、发送您的第一个报文 ................................................................................................. - 3 -§3、1、占用端口 ........................................................................................................... - 3 -§3、2、恢复端口出厂模式 ........................................................................................... - 4 -§3、3、设置端口属性 ................................................................................................... - 5 -§3、4、创建与编辑数据流(Packet Stream) ................................................................. - 7 -§4、流构建与时延统计 ................................................................................................... - 12 -§5、配置端口协议与IP地址 .......................................................................................... - 14 -§6、自定义报文统计-基于端口的统计.......................................................................... - 19 -§7、使用IxExplorer Ping DUT 接口地址 ....................................................................... - 21 -§8、抓包分析-基于流的统计.......................................................................................... - 23 -§9、更改IxExplorer默认抓包大小................................................................................. - 27 -§10、报文回放 ................................................................................................................. - 28 -§11、统计表格计算 ......................................................................................................... - 30 -§12、强大的自定义域UDF ............................................................................................. - 32 -§12、1、什么就是UDF与Table UDF ......................................................................... - 32 -§12、2、通过表格自定义域构造EtherIP .................................................................. - 32 -§12、2、1、EtherIP协议 ........................................................................................ - 32 -§12、2、2、提出问题 ............................................................................................. - 32 -§12、2、3、解决方法 ............................................................................................. - 32 -§1、什么就是IxExplorerIxExplorer就是随Ixia机框提供的基础工具。
IAI 软件

S OFTWARE L ICENSE A GREEMENTThank you for purchasing the RC Robo Cylinder Controller PC Interface Software for Windows. Using this software constitutes the user’s acceptance of the terms of the software license agreement so please read this carefully prior to installing the software. If you cannot comply with these terms, you may return the unused software to IAI for a full refund.IAI America, Inc. (“IAI”) grants a nontransferable and nonexclusive right to use the software program (“Software) enclosed with this agreement in accordance with the conditions stated below and the purchaser (“User”) hereby agrees to the same.1.Term of AgreementThis agreement becomes effective when the User installs the Software and remains in effect until the User informs IAI otherwise or until the User terminates the agreement per Article 4 below.2.Transfer and Use RestrictionsThe User can install the Software in a single computer only. To run the software in more than one computer requires a separate license agreement. Unless the User has received the written consent of IAI, the User is not permitted to transfer or grant the use of the Software or any accompanying material to a third party. The User cannot provide this Software to anyone except employees of the User or IAI without the express written consent of IAI. The User is not permitted to print or reproduce the Software or any portion thereof except under conditions specifically stated in this agreement.3.Copying RestrictionsUnder the terms of this agreement, the User is not permitted to reproduce any printed material, or any portion thereof, provided by IAI. The User is allowed to copy the Software in machine-readable form for backup purposes only.4.Terminating the AgreementIf the User violates any provision of this agreement or if for some reason he cannot comply with the terms of this agreement, IAI has the right to terminate this agreement immediately without any prior notification. In such event, the User will destroy the Software and any copies within 10 days of the termination of this agreement and notify IAI that this action has been taken.5.Limited WarrantyIAI has the right to modify any portion of the Software specifications without prior notification to the User. IAI does not issue any warranties with respect to the Software and the User shall not be entitled to request compen-sation for any damages that may result from the use of the Software.1.Before You Begin1.1Items Supplied With This SoftwarePlease check to make sure that the following items are included in your PC software package.Operating manual3.5-inch floppy disk of the software (2)Standard RS232C cable and 9-pin adapter1.2What You Will Need (Operating Requirements)The following PC and accessories will be necessary to run this software program.A PC that runs under Windows and compatible keyboard.Enough memory to run Windows.A monitor compatible with the PC.A VGA graphic board or better.Mouse or other pointing device and mouse driver.(Windows 95, Windows 98 and Windows NT).A floppy disk drive unit that runs a 3.5-inch disk with 1.25 or 1.44MB capacity.The hard disk should have 2MB or more of free memory space. (The software is run from the hard disk).An RS232C serial port (25 or 9 pins).A printer compatible with the PC.1.3Software InstallationThis software is run from the hard disk. In this section, we explain how to install the software.Insert floppy disk 1 in the floppy disk drive.Execute Setup.EXE on disk 1.The installation program will be execute, simply follow the prompts that appear.When the installation program is complete, an item called Robo Cylinder is created in the start menu.Select this item to run the software.1.4Software StartupTurn off the power for the PC and the Robo Cylinder Controller, then connect the Robo Cylinder Controller to the PC with the standard RS232C cable that comes with the software.Turn the PC and Robo Cylinder Controller power back on, then run Windows.Run the software.±When you start the software, on-line or off-line mode is determined by whether the Robo Cylinder Controller and thePC are connected. If you connect the controller and the PC after the software has been started, you will be able toreconnect it in an on-line mode.The main menu (initial screen) will be displayed. Select the desired operation, then follow the screen prompts and input the appropriate data.2.Check for Connected Axis“Check for connected axis” is executed during application start. When axis is connected normally, the “connecting”column will display “connection” and displays “---” when abnormal connection occurs (see diagram 2.1 below).Note: On-line operation will not be executed until all axes (0~15) are checked.Check for Connected Axes Window(Diagram 2.1)3.Main Software WindowMain Software Window (Diagram 3.1)3.1Operation According to Main Software WindowAfter you start the software, the main window appears and you will see a menu bar with 7 items and a speed bar with 12 icons displayed (initial screen: main menu).(1)File (off-line operations)New File Create new point data file.Open Select and open an existing point data file.Close Closes active point file window.Exit Exits the application.(2) Position (on-line operations)Edit/Teaching Reads in the position data from the controller and executes data edit • teaching.Save to CTL.Transfers (writes in) the edited position data to the controller.Print Outputs the position data to the printer.(3) Parameter (on-line operations)Edit Reads in the parameters from the controller and executes data edit.Transfer to controller Transfers (writes in) the parameters to the controller.Print Outputs the parameter data to the printer.3.Main Software Window(4)Monitor (on-line operation)Axis Status Shows the status of each axis (axis status, internal flag, I/O Port)(5)SettingCommunications Executes communications setting(communication speed, communication port)Controller SettingCheck for connected axes Executes axis reconnectAddressing axis number Sets the axis number of an integrated controller (models RSI, EMI).Note:When a detached type controller is used, this menu holds no significance.Addressing on detached controller is accomplished via dip switches.When connecting multiple axes using a controller link cable:Upon power-up of a controller not directly connect to the teaching pendant,make sure to reconnect.(6)WindowCascade Lines up the windows in an angle so they overlapTile Horizontal Arranges the windows horizontally without any overlapTile V ertical Arranges the windows vertically without any overlapArrange icon Lines up the icons along the bottom of the screenMinimizing Minimizes the windowsNormalizing Expands the windows(7)HelpAbout Displays the software copyright and version number3.Main Software Window3.2Operation According to Tool ButtonMain Menu4.Axis SelectionThe following tasks require selecting the axis number that applies using the Axis Select Screen.(1)Open the Position Data Edit Window using the on-line mode (note).(2)Transfer the Position Data which was edited in the off-line mode to the controller.(3)Open Parameter Edit Window using the on-line Mode (note).(4)Transfer the parameter that was edited in off-line mode.(5)Open the status monitor window.(6)Save all data (caution).(7)Transfer all data (caution).The Axis Selection Screen will display during each of the above modes. In addition, the axis number capable of execution will bedisplayed in the “connected axes.” Press the “ OK” button after pressing the “ >” button and selecting the axis. When selecting all axes, press the “ >>” button, followed by the “OK” button.Axis Selection Screen (Diagram 4.1)Caution: You cannot display the axis number that is already being edited with either the “Position Edit Window”or “Parameter Edit Window.” If you wish to select this axis, please close the edit window before proceeding.5.Position DataTopics covered:Executing Position data edit in either on-line or off-line status.5-1On-line ModeThis is a mode which reads in and edits data from the controller (see diagram below). In this mode, you may composeposition data according to [MDI (Value direct input)], [direct teach], [jog] and [increments]. In addition, at the same time, you may also check a taught position according to the test operation modes (Position Move and Easy Program).Position Edit Window (Diagram 5.1)(On-line)Caution:When opening Position Edit Window using the on-line mode, you cannot open the Parameter Edit Window of the same axis.5.Position Data(1) Save to fileSaves file on floppy or hard disk.(2)Save to CTL Transfers (writes) the data into the controller.(3)PrintOutputs the position data to the printer.(4)CutCuts the data selected in the position table to the clipboard.* Selection is per row.(5)CopyCopies the data selected from the position table to the clipboard.(6)PastePastes the data cut or copied from the position table to the selected position.(7)Display ChangeChanges from the normal display of the position table to the detailed display (or reverse).(8)Status MonitorDisplays the status monitor window currently being edited. The window displayed here is the same as the one executed from the main menu ( [Monitor] [Status] ).1. Tool Button2.Current Location • Alarm Code Display SectionDisplays the alarm code and current axis location (unit/mm) that are being edited.Tool Button (Diagram 5.2)Tool Button (Diagram 5.3)4.Position Move (Test Mode)You can test the position data currently highlighted by moving to it.The movement speed will be the speed set in the position data which is multiplied by the speed ratio value (The speed ratio value can be set using the track bar).5.Position Data3.Jog • Increments OperationsAfter selecting either jog or increment, select check button, then move the axis using the “ FW (+)• Bw (-)” buttons. The speed during jog is selected using the track bar from 1, 10, 30, 50, 100 (mm/sec).The incremental amount during incremental moves is selected using the radio button from 0.03, 0.10, 0.50 (mm).Once you clicking the button ON, the actuator will move at the assigned increment value. By pressing the button for more than one second, the slide will jog move at 1 [mm/sec]. And by further pressing the button , each second, jog speed will accelerates 10 30 100 [mm/sec]. Also, after homing complete status, pressing the “Teach Point”button will teach current location into the table.Note: Teaching is executed in the row of position data input which is highlighted. Please verify the point number before pressing the “Teach Point” Button.Track Bar Check ButtonRadio ButtonSpeed ratio valueTrack Bar Jog • Increment (Diagram 5.4) Position Move (Diagram 5.5)consecutive will stop the actuator at the point where the move completes.Note 1: When making permanent changes to the data read from the controller, write the data into the controller.Note 2: While test mode is active, changing jog increments and point data is prohibited.5.Position DataMultiple Axis SimultaneouslyUse the Multiple Axis Simultaneously Key to move selected axes simultaneously through the axis connected by the link cable (control axis). Press the Multiple Axis Simultaneous Start Key located in the Position Move Screen (see diagram right).Multiple Axis Simultaneously Window will be displayed (see diagram 5.7 below).Multiple Axis Simultaneously Window (Diagram 5.7)Multiple Axis Simultaneously Start Button (Diagram 5.6)Check ButtonAxis NumberPosition5.Position DataCheck Box:Click on this box to select axis to move.Axis Number:The axis number is determined by the addressing.Position:Sets position No. selection. Executes move and determines the move range in a similarmethod as the consecutive move against the assigned axis. All checked axes will move to thisposition number (if data is not available, then move will not be executed).Current Location:Displays the current position.Step Move Button:Executes consecutive move. If this button is pressed during consecutive move, the movestops at the current position in the point table.Stop Button:Cancels the current move and stops there.Application Example:When the setting is similar to the bottom diagram on the previous page, and position data of each axes set as the diagram below..Note:• Axis number 2 actuator will not move since there is no check mark in the check box.• No movement is executed when there is no data..5.Position Data5.ProgramAlthough this is same test operation mode as the continuous position move, you can assign the position in any order.Enter position number (0~15) or after “R” (repeat order assigned) into the program number input area,then click on the “Start” Button. The maximum number of step numbers that can be assigned are 17 (includes “R”).Steps will be ineffective after an empty column or after “R.”By clicking the “Start” Button,motion starts, and button changes to “Stop” Button. The move will end by clicking the button one more time, the “Start” Button will return. The motion order set in the cannot be saved the controller or a file.6.Servo, Home and Alarm Buttons(1)Servo ButtonExecutes Servo ON/OFF. During servo ON status, the button will be displayed a blue color.Before homing, the servo will be OFF status. You may move the actuator manually and teach the assigned position using the “Teach Point” button.Caution:By closing the software in a servo OFF status, the servo will remain in servo OFF status, and P I 0motion controls is not possible. To home, either restart the software in a connected status or cycle the controller power.(2)Home ButtonExecutes homing. When homing is complete, the button will turn green.Start Button /Stop ButtonPosition Program Input areaProgram Mode (Diagram 5.8)Servo, Home and Alarm Buttons (Diagram 5.9)(3)Alarm ButtonReleases the alarm status. However, release is restricted to during servo OFF status or when the cause of the alarm is dissolved. During an alarm, the button will display red color.7.Position Data InputFor entering the position data. Although normal input is done using columns as “Location,” “Speed,” Acc”and “Comment,” by changing to the detail display using the “Display Change” button, you may also enter columns such as “Push,” “Positioning Band,” and “MAX ACC. ”Position Data Input -Normal Display (Diagram 5.10)Position Data Input - Detailed Display Status (Diagram 5.11)5.Position Data5.Position Data5-2 Off-line ModeWhen a new point is being edited, the software will be in the off-line status. During this mode, the sectionsrelated to axis movement will not be displayed, and only the tool bar and point data input will be active.Note:“Comment” may be saved only to file and cannot be saved to the controller.Parameter Edit6.It is possible to read in and edit the data either from the controller or a file. In addition, you may also output data to the printer.Edited data may be saved and sent to a file or the controller.6.Parameter Edit• When soft limit is modified at the customer site, please set a value which extends 0.3mm outside of the effective area. Example: When setting the effective area between 0mm~80mmSoft limit + side:80.3Soft limit - side: -0.3• After changing the homing direction, all saved position data will be cleared. As needed, please re-enter the data.• Reversed homing direction may not be done on the Rod Type Actuator (RS • RM).Caution:Please cycle the controller power after making parameter changes.Although pressing the emergency switch or port switch ON/OFF willrewrite the parameter, there may be ones that will go into effect untilpower is cycled.7.MonitorYou may monitor the following status:1.Axis Status(1)Current location(2)Current speed (speed during movement)(3)Alarm code2.Internal Flag(1)Controller main power ON/OFF status(2)Servo ON/OFF status(3)Homing complete flag ON/OFF(4)Run status ON/OFF3.P I O Input PortDisplays ON/OFF status of each input signal of P I O.4.P I O Output PortDisplays ON/OFF depending on which button is pressed.5.Display ON/OFF buttonTurns on each colum display ON/OFF depending on which button is pressed.Display ON/OFF Button (From the left axis status, internal flag, input, output)Status Monitor (Diagram 7.1)8.Version UpdateThe screen belows displays the software version.Software Version Screen (Diagram 8.1)9.Error CodesCode Error Description Common Solutions05A Transmission Error Abnormal Communication, check for noise. Inspect all serial ports and cables involved.05B Transmission Framing Error 05D Start T ext Error 05E End T ext Error 07F BCC Error061FNCCHR, W Address Error Serial string needs to be formated correctly .062 1 Operand Error Incorrect Data Command (possibly an operation not allowed with the controller type).063 2 Operand ErrorIncorrect Data Command (possibly an operation not allowed with the controller type).In case of another attached controller, there could be a setting of rotation numbers which surpasses 2000rpm from the SW7-ON, SW8-off from the controller. 064 3 Operand ErrorIncorrect Data Command Rejection(could be an operation not allowed with the controller type).070RUN-OFF, Motion Command Execution Requirement Incompatible Command Rejection (possibly due to External POP command).071No homing, PTP 073Servo ON, Error Reset 074Communication Error 075During homing, movement command givenWhen release is not possible with the controller power reinstalled, you need to either execute a common parameter edit or eset the controller.0B0Bank 30 Error (Parameter)Execute a common parameter edit or initialize the controller.0B1Bank 31 Error (Point)When release is not possible after the controller power was cycled, you need to either execute a common parameter edit or initialize the controller.1. Cycle power to controller2. Possibly , parameters need to be set correctly.Page 219.Error Codes Code Error DescriptionCommon Solutions 0BE Homing Time Out ErrorCheck the motor and encoder cables. Make sure that the slider is not jammed against the hard stop.0C0Over SpeedPlease reduce the payload or lower the velocity and ACC/DEC.0C1Servo Error0D0Excess Main Power VoltagePlease check the main power voltage.0C3Excess Circuit VoltagePlease check the payload or lower the velocity and ACC/DEC.0D1Deviation Over FlowPlease check for mechanical binding.0D8OverloadT oo much payload. Please check for mechanical binding.0E0No A and B Pulse FeedbackPlease check the encoder/cable.0E9No A Pulse Feedback0EA No B Pulse Feedback0EB No C Phase Feedback0EC No PS Phase Feedback0F8Non-Volatile Memory Failure Reset the controller.。
IACC系统应用说明

IACC系统应用说明1、软件安装关闭杀毒软件、防火墙等防御软件,防止安装过程中有进程被禁止导致安装失败。
执行.exe文件并制定路径进行安装(在本机内如安装后又卸载,再安装,路径默认无法修改,除非重装系统;如安装失败,卸载后重新装若再失败,也只能重装系统,暂时未发现好方法)。
2、环境变量修改1)多控制器数据库(即 N个控制器均在同一个IACC打开文件中)的设置:此种情况无需做任何环境变量修改(IACC-DBNAME中变量值默认IACC),且控制器指定路径也无需建立,IACC默认安装目录下的Database中的文件就是数据库内容。
2)单控制器数据库(即每个控制器对应一个IACC打开文件)的设置:此种情况需进行环境变量修改,我的电脑右键属性-高级环境变量-系统变量内容中找到IACC-DBNAME中变量值清空,这种情况下就需要指定一个控制器集中的文档,例如:D:\FAR2DB,并在Database文档中的IACCSettings文件中设置每个IACC的路径,按文件内容的例子进行设置,例如:[DATABASES]CP2111; D:\FAR2DB\CP2111; CP2111 Database;; (单个控制器要加此分号代表多个控制器路径,这样打开IACC才会正常显示各控制器路径,原因不明,如有2个以上路径则无需此分号)3、控制器(基础控制器)建立基础控制器内容:网络、交换机、主站、控制器、数据模板、操作宏模板。
1)控制器文件建立:把Database文档中EmptyDB文档拷贝至指定路径,例如到D:\FAR2DB文档中,然后把EmptyDB文档改为要建的控制器名字,例如CP2111,然后进入文档把IACC.icd文件改名为CP2111.icd。
之后就可以执行IACC打开CP2111控制器进行其他设置了。
2)网络建立:进入控制器后,configuration右键new中选中network,建立HPS network(还可继续配置名字、地址等内容,但由于控制器卡件配置原因,此处可以不做任何配置)3)交换机建立:网络右键new中选中network component,建立交换机,根据交换机型号和交换口数选择交换机文件,例如:24口,选择SW24P,并选择交换机个数。
IAI机械手控制器设置软件

从文件读入位置数据时,点击「ファイル (F)」(文件)→「開く(O)」(打开),即打开「フ
ァイルを開く」(打开文件)窗口。或者点击「ファイル (F)」(文件)→「コントローラへ転送
(L)」(传送至控制器)→「ポジション (T)」(位置),也可打开「ファイルを開く」(打开
文件)窗口。
已存的文件
选择保存位置数据的文件
-7-
7.监视
能够监控各种状态及控制器错误列表。
7.1 状态监视画面
监视各种状态时,点击主菜单中的<Ϟχλ>(监视)ˠ<εςʔλε>(状态),或点击 键。从
选择的轴画面中,选择须监视的轴的编号。
图5.20 位置数据输入区域(普通显示状态)
图5.21 位置数据输入区域(详细显示状态)
①No. 显示位置数据编码。
②位置 输入驱动轴移动的目标位置。[mm]
ɾ 绝对坐标指定:输入从原点到目标位置的距离。
不能输入负数。
ɾ 相对坐标指定:输入从当前位置到目标位置的距离。
能输入负数。(显示坐标的负方向时)
※在联机模式下打开位置编辑窗口的同时,不能打开同轴的参数编辑窗口。(其他轴可以打开。)
-1-
各键、输入部的操作方法如下所示。
(1)工具栏
图 位置数据编辑画面工具条 ①文件保存
电缸编程软件的数据备份方法
(RCP、RCS、E-CON)
5. 位置数据编辑
在联机或非联机状态下,进行位置数据编辑。
5.1 联机模式
是利用从控制器读入的数据进行编辑的模式。 RCPɺRCSɺE-ConɺRCP2ɺERC时,如图所示模式。
将数据保存至文件。 ②传送至控制器
IAI电缸控制器MCEP_C学习摘抄
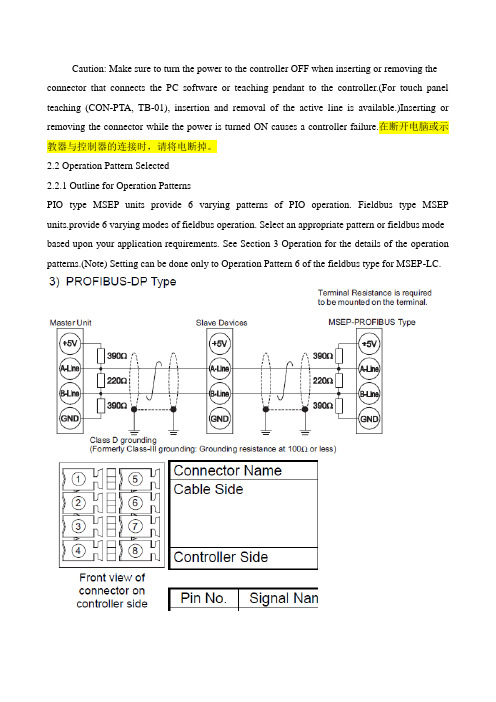
Caution: Make sure to turn the power to the controller OFF when inserting or removing the connector that connects the PC software or teaching pendant to the controller.(For touch panel teaching (CON-PTA, TB-01), insertion and removal of the active line is available.)Inserting or removing the connector while the power is turned ON causes a controller failure.在断开电脑或示教器与控制器的连接时,请将电断掉。
2.2 Operation Pattern Selected2.2.1 Outline for Operation PatternsPIO type MSEP units provide 6 varying patterns of PIO operation. Fieldbus type MSEP units.provide 6 varying modes of fieldbus operation. Select an appropriate pattern or fieldbus mode based upon your application requirements. See Section 3 Operation for the details of the operation patterns.(Note) Setting can be done only to Operation Pattern 6 of the fieldbus type for MSEP-LC.看到第37页第83页:Operation of MSEP-C(Note) Refer to 3.2 for MPEP-LC Type 3.1.1 Basic Operation MethodsThere are two types of methods for operation, one to control with PIO and the other to controlwit fieldbus. Check the model code indicated on the model code card attached on the frontpanel of the body to see which method should be applied for your product. [Refer to Section1.1.5]Operation Mode Available in Fieldbus Type。
Ixia测试RFC2889使用手册

Ixia测试RFC2889使用手册2012-2-27目录摘要 (4)一.RFC2889测试指标 (4)二.RFC2889测试项介绍 (4)2.1地址缓存容量测试(address cache size) (4)2.2地址学习速率(address rate) (4)2.3错误帧过滤(error frame filterin) (4)2.4背压(backpressure) (5)2.5广播帧转发速率(broadcast rate) (5)2.6全网状通信(fully meshed) (5)2.7线端阻塞(head of line blocking) (5)2.8部分网状吞吐量(many to one和one to many) (5)2.9部分网状多重设备(partially meshed) (6)3.0部分网状单向通信(many to many mesh) (6)三.测试需求 (6)3.1测试硬件资源 (6)3.2软件资源 (6)3.3测试拓扑图 (7)四.性能测试 (7)4.1测试步骤 (7)4.1.1IXIA的连接步骤 (7)4.1.2Traffic setup基本配置 (10)4.1.3在“Test setup”中设置测试运行的参数 (12)4.1.4option设置 (13)4.1.5执行测试 (15)4.1.6补充 (16)4.2地址缓存能力测试配置 (17)4.2.1拓扑环境配置 (17)4.2.2初始化地址配置 (18)4.2.3速率配置 (18)4.3address rate测试配置 (19)4.3.1拓扑环境配置 (19)4.3.2地址池配置 (20)4.4背压测试设置 (21)4.4.1拓扑环境配置 (21)4.5错误帧测试设置 (22)4.5.1拓扑环境配置 (22)4.5.2帧大小配置 (23)4.5.3测试结果显示配置 (24)4.6广播帧测试设置 (24)4.6.1拓扑环境配置 (24)4.6.2传输方式设置 (25)4.7全网状通信测试设置 (26)4.7.1拓扑环境配置 (26)4.7.2测试参数配置 (27)4.7.3测试结果配置 (28)4.8线端阻塞测试设置 (28)4.8.1拓扑环境配置 (28)4.8.2测试结果配置 (29)4.9部分网状吞吐量测试设置 (29)4.9.1端口速率配置 (30)4.9.2拓扑环境配置 (30)4.9.3测试结果设置 (31)4.10部分网状多重设备测试设置 (31)4.10.1拓扑环境配置 (31)4.10.2测试参数配置 (32)4.10.3测试结果配置 (33)4.11部分网状单向通信测试设置 (33)4.11.1拓扑环境配置 (33)4.10.2测试参数配置 (34)4.10.3测试结果配置 (34)摘要本文档讨论并定义了大量被用于描述网络互连设备表现特征的测试,仅供初学者使用参考;一.RFC2889测试指标Rfc2889的测试特点将已在rfc2544中定义的网络互连设备测试基准的方法扩展到局域网交换设备的测试中来。
IAI网关的用法

(6) 4 种 GateWayR 单元
为支持各类现场网络,通过使用以下 4 种 GateWayR 单元(网关功能),可以满足各种类型的
或刷新正常接收
(2) DeviceNet
符号
显示颜色
绿
STATUS 1
橙
绿/橙 绿
STATUS 0
橙
绿/橙
状态 点亮 闪烁 点亮 闪烁 交互 点亮 闪烁 点亮 闪烁 交互
说明 联机状态 联机状态(未确立 Cnx) 发生错误。 1 个以上 Cnx 超时 正在自我诊断 正常运转 无配置信息或配置信息不完整状态 故障(不可恢复) 故障(可恢复) 正在自我诊断
ROBONET 动作功能一览
项目 各轴区域
动作模式
固定区域
位置点数写入数
指定位置编号运转
直接指定位置数据
直接指定速度及加减速度
直接指定定位距离
推压动作
完成位置编号监控
区域输出监控
位置区域输出监控
示教动作
JOG 动作 微调动作
各类状态信号监控
※1
当前位置监控
※1
报警代码监控
※1
速度及电流值监控
※11)
(注)图片为轴用控制器单元或简易绝对编码器 R 单元的附件。
3.5.8 FG 端子(框架接地)
用于 GateWayR 单元接地的端子,螺丝尺寸为 M3。
3.5.9 EMG 连接器(急停用)
用于连接急停回路的连接器。所有轴统一接通或断开 (ON/OFF) 驱动源。 网关侧连接器:MC1.5/2-GF-3.81(菲尼克斯电气制造) 电缆侧连接器:MC1.5/2-GF-3.81(菲尼克斯电气制造)=附件
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(位置修改)
1
3
如果需要改程序的话, 需要把开关由auto拨到 menu,要记住最后还要 把开关拨回到auto上。
示教模式 监控模式
将数据线插入到IAI控制器插口中。
2
4
连线后,要选择动作模式, 需要修改程序时,要选择示 教模式,修改程序后应选择 监视模式
打开IAI软件“RC”,能正常连上线时, 会在驱动轴编号的状态栏显示蓝色的 “连接”。
双击左面的”轴No.0“, 会展开菜单,有几个项目:
1.位置数据, 2.参数, 3.状态, 4.控制器报警列表, 5.速度/电流Leabharlann 5 这是“位置数据”调整界面。
按“写入控制器”按钮, 会把所设电缸的位置写 入到电缸控制器。
显示的是,当前伺服 电机所在的位置。
按“加号”“减 号”按钮,电缸 会向前或向后移 动。
按此三角按钮,电缸会 走到选择的位置上。
按此按钮,电缸会自动回到原点。
6
点击如图所示按钮可以查看电缸所出现 的历史报警