LHT-Ⅱ型谐波减速器西门子伺服电机松下伺服电机
绿的谐波——领跑机器人精密谐波减速器

1)齿高较低,不需要很深的啮合距离就可以获得 较大的啮合量,可承受较大的扭矩;
LHS/LHSG—III中空系列谐波减速器LHS/LHSG—IV实轴系列谐波减速器
2)齿宽较大,齿根弧度增大,减少发生断裂失效 的风险; 3)由于所需柔轮变形量较小,可使柔轮的寿命得
曲⑨
LHS/LHSG—CL—III系,0轻量型谐波减速器 三组件型谐波减速嚣
arcsec;
绿的谐波所有谐波减速器出厂时的背隙均≤10 arcsec(绝大部分产品为0背隙);结合国内市场的实 际情况,免费为客户根据伺服电机输m轴尺寸定制波发 生器输入轴孑L;免费向客户提供输入、输出端密封用0 型圈和润滑脂;常规产品的交货周期不超过一个月。
四、技术优势 1.对谐波减速齿轮啮合原理的独到认识 公司跳出了传统上以willis定理v¨:。:o为基础
到极大提高; 4)多达20%~30%的齿参与啮合,齿面比压较小。 3.性能参数优势
绿的谐波生产的谐波减速器除具有高精度、高可靠
性、大扭矩、大速比、小体积、长寿命等特性外,与国 内外同类型产品比较,还具备以下优势: 1)承载扭矩大幅提升,是国内同类产品2倍以上, 极限载荷优于国外产品; 2)体积小、重量轻,体积是国内同类产品1/2以下; 3)高效率、低背隙,可实现零误差精确传动,所 有产品出厂时的背隙≤lO aresec(绝大部分产品均为。 背隙),空程误差≤40
囝j。参
LHS/LHSG系列礼帽形谐波减速器LHD系列超扁平谐波减速器
Robot
Technique and AppIicalion2014 3“P型齿”克服了谐波啮合齿形的缺点,通过一系 列创新性的设计,可极大提高柔轮的使用寿命,与国外 同类产品齿形比较,绿的谐波的产品有以下优点:
华大系列伺服电机选型手册

LB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~27额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):220LBB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~19.1额定功率(Kw):0.4~3.0额定转速(rpm):1500、2000、3000最高转速(rpm):3000、5000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):220HB系列机座号(mm):110、130、150额定转矩(Nm):2~27额定功率(Kw):0.6~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):380HBB系列机座号(mm):110、130、150额定转矩(Nm):2.4~28.7额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000最高转速(rpm):3000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):380请您关注以下伺服电机为自冷式散热方式,安装时请选择足够大的安装板。
伺服电机长期工作,机体本身会有一定的温度,这是正常情况。
装配了失电制动器的伺服电机,其失电制动器的电源必须由驱动器控制开闭,否则会造成工作状态不佳。
伺服电机内装精密反馈元件,严禁重力敲击电机轴伸端及后部。
请注意电机轴伸端的最大径、轴向力的限值。
严禁随意更改、拆装及加工电机部件。
请您将需求告之我们,我们来为您服务。
电机电联接器转矩转速曲线示意图LB 、HB系列 LBB 、HBB 系列LB、LBB 、HB 、HBB 系列伺服电机的Mmax=3Mn ;Mmax 输出状态为短时工作。
西门子伺服电机_蜗轮蜗杆减速机 西门子伺服电机选型手册

西门子伺服电机_蜗轮蜗杆减速机西门子伺服电机选型手册性能特点1.ANRV系列采用单级蜗轮蜗杆传动,也可由两种机座号配合成双级减速传动。
2.箱体、法兰盘、端盖等零件采用优质铝合金压铸而成,外形轻巧美观、结构紧凑、体积小、重量轻,节省安装空间,且不易锈蚀。
3.配套电机采用铝壳电机,散热性能好,安全可靠、效率高、传动平稳、振动小、噪音低。
4.配套动力输出及转矩输出的多种连接结构,满足各种连接需要;箱体外形设计及底脚孔设置布局适应多种安装方式,通用性强。
5.箱体上设置加油孔和放油孔,润滑油定期更换,不宜损耗变质,便于维护保养。
6.由单级蜗杆减速器组合而成的双级蜗杆减速机,具有单级蜗杆减速机的一切优点,可获得较大的传动比。
7.根据用户需要可提供本样本之外的速比和结构形式。
场所条件1.环境温度在-40℃~50℃条件下额定运行。
(0℃以下启动时润滑油要加热到0℃以上)2.海拔不超过1000m。
3.输入转速不大于1500r/min。
4.可用于正反运转,无行业限制ANRV系列蜗轮蜗杆减速电动机型号说明型号说明1.ANRV—蜗轮蜗杆减速机产品代码。
2.整机结构:无代码…单级 E…双级。
3.入轴连接方式:无代码…单输入轴 B…双输入轴 D…带电机输入法兰DB…一端带输入轴,一端带电机输入法兰。
4.产品规格:单级以蜗轮副中心距表示,如75。
双级以两对蜗轮副中心距表示,如40/63。
5.安装型式:单级有B3、B6、B7、B8、V5、V6六种。
双级有AS1、AS2、BS1、BS2、VS1、VS2、PS1、PS2八种。
6.电机功率:配用Y2、YS系列电机,由B5、B14两种安装型式,如2.2(B14)。
(如带输入法兰而没有电机,只填写电机安装型式)。
7.理论传动比:如i=20。
8.附件:A…单输出轴 B…双输出轴 D…防护罩E…转矩臂 F…输出法兰(ANRV40、50、63有F、FB、FL三种形式)。
型号标记选型说明1.为正确选用ANRV系列蜗轮蜗杆减速机,首先应了解以下几点:●负荷条件●使用转速范围或传动比●工作运转情况及环境●安装空间2.确定工作情况系数K1及工作情况修正系数K2根据表一,决定机械负荷种类A、B、C根据运转时间(小时/日)和启动频率(次/小时)从图1中求得工作情况系数K1根据表二,查取工作情况修正系数K23.选定减速机用户须确定工作机输入机械负荷T(转矩),以T乘以工作情况系数K1,再乘以工作情况修正系数K2,即获得减速机应有的输出转矩值,以此为依据,并结合传动比值或输出转数值,选定所需减速机规格。
伺服电机的选择原则
伺服电机的选择原则 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】1、机电领域中伺服电机的选现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
伺服驱动装置核心,因此,伺服电机的选择就变得尤为重要。
首先要选出满足给定负载要求的电动机,然后量、体积等技术经济指标选择最适合的各种电机的T-(1)传统的选择这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表用角速度 (t),角加速度 (t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他然。
电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。
用峰值,T峰值表示最电机的最大速度决定了减速器减速比的上限,n上限= 峰值,最大/ 峰值,同样,电机的最大的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不合适的。
反每种电机的广泛类比来确定上下限之间可行的传动比范围。
只用峰值功率作为选择电机的原则传动比的准确计算非常繁(2)新的选择一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。
这种方法的优点:况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种需要用大量的类比来检查电机是否能够驱动某个特定在电机和负载之间的传动比会改变电机提供的动力荷载参数。
比如,一个大的传动比会减小外的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电扭矩。
选择一个合适的传动比就能平衡这相反的两个方面。
通常,应用有如下两种方法可以找它会把电机与工作任务很好地协调起来。
一是,从电机得到的最大速度小于电机自身的最大速二是,电机任意时刻的标准扭矩小于电机额定扭矩2、一般伺服电机选择考虑(1)电机的最高电机选择首先依据机床快速行程速度。
NMRV050-30-370w松下伺服电机蜗轮减速机
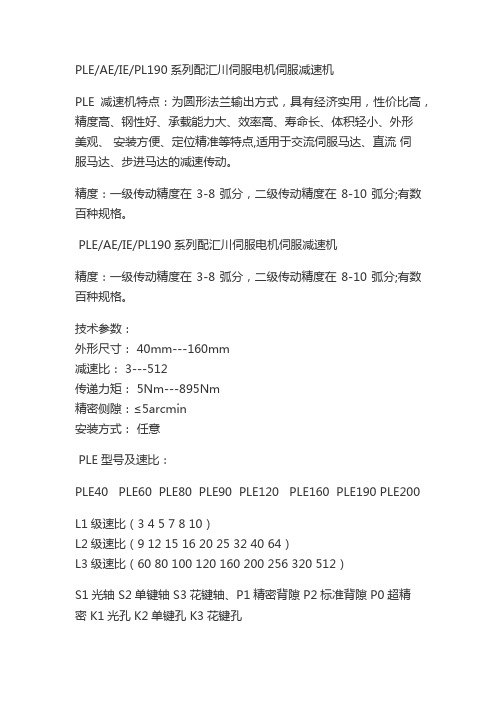
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
伺服电机如何进行选型

伺服电机选型技术指南1、机电领域中伺服电机的选择原则现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。
首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
各种电机的T-ω曲线(1)传统的选择方法这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度ω(t),角加速度α(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。
很显然。
电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。
用ω峰值,T峰值表示最大值或者峰值。
电机的最大速度决定了减速器减速比的上限,n上限=ω峰值,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不合适的。
反之,则可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。
只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐。
(2)新的选择方法一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。
这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机。
因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。
在电机和负载之间的传动比会改变电机提供的动力荷载参数。
比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。
盘点国内机器人行业谐波减速机主要厂商

盘点国内机器人行业谐波减速机主要厂商(图)导读:目前全球机器人行业,75%的精密减速机被日本的Nabtesco和Harmonic Drive两家垄断(业界俗称RV减速机和谐波减速机),其中Harmonic Drive在工业机器人关节领域拥有15%的市场占有率。
OFweek机器人网讯:目前应用于机器人领域的减速机主要有两种,一种是RV减速器,另一种是谐波减速器。
在关节型机器人中,由于RV减速器具有更高的刚度和回转精度,一般将RV减速器放置在机座、大臂、肩部等重负载的位置,而将谐波减速器放置在小臂、腕部或手部。
对于高精度机器人减速器,日本具备绝对领先优势,目前全球机器人行业75%的精密减速机被日本的Nabtesco和Harmonic Drive两家垄断(业界俗称RV减速机和谐波减速机),包括ABB、FANUC、KUKA等国际主流机器人厂商的减速器均由上述两家公司提供。
其中Harmonic Drive在工业机器人关节领域拥有15%的市场占有率。
纳博特斯克的专利产品:两级摆线减速机相对高精度RV减速机而言,国内谐波减速机研究、产业化有所看点,尽管与日本产品在输入转速、传动精度、传动效率等方面存在较大差距,但国内已有可替代产品,如北京谐波传动所、苏州绿的、中技克美等,目前中技克美对国内部分整机厂家(如广州数控)提供产品。
北京谐波传动技术研究所北京谐波传动技术研究所成立于1983年,具有长期的关于谐波齿轮传动技术的研发及为用户服务的丰富经验,是从事谐波传动及特种传动技术的研发销售的专业化企业。
主要研发销售标准谐波减速器、谐波传动组件及按用户所需设计非标电机套装。
经多年的研发实践及用户意见使用要求的总结,于1993年编写制定"谐波传动减速器国家标准",其代号为GB/T14118-93。
目前已经形成包括XB1系列谐波减速机、XB2系列谐波减速机和XB2系列谐波减速机等整机及组件产品体系,可以满足用户的各种需求。
西门子伺服电机简明样本2013
西门子提供免费的、功能强大的产品图纸工具软件 CAD-Creator。通过 CAD-Creator 软件可以生成电机及驱动、控制系统的 2 维尺寸 图和 3 维立体示意图。 下载网址 :/download/searchResult.aspx?searchText=cad+creator
依靠完善的产品规格体系、创新的模块化设计和上述的丰富可选项,您可以根据实际使用的需求,选择到犹如定制化的最适合电机 产品。您还可以借助西门子选型工具 Sizer 和图纸工具 CAD-Creator 来进行辅助选择,上述软件均免费使用。
请注意 :并非所电机都覆盖所有上文所述可选项。具体的使用需求可咨询西门子当地销售工程师或使用西门子标准选型大全(PM 21) 来进行更精确的选择。
10.0 15.0 18.0 3.7 5.4 8.0 6.5 6.5 2.6 3.0 4.3 5.0 0.9 2.0
15.0 4.7 6.0 8.7 10.0 1.5
堵转 转矩
M0 Nm
3.0 6.0 8.5 11.0 12.0 16.0 20.0 18.0 27.0 36.0 48.0 3.0 6.0 8.5 11.0 8.0 12.0 16.0 20.0 18.0 27.0 36.0 48.0 6.0 8.5 11.0 8.0 12.0 16.0 0.18 0.35 0.85 1.15 1.6 1.6 3.0
伺服电机用行星减速机
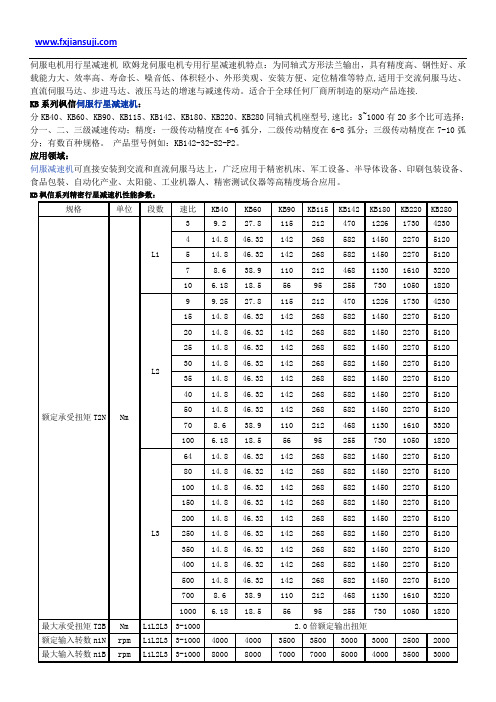
伺服电机用行星减速机欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列枫信伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB枫信系列精密行星减速机性能参数:精密背隙P1arcmin L1 3-10. ≤4≤4≤4≤4≤4≤4≤4≤4 L2 9-100 ≤6≤6≤6≤6≤6≤6≤6≤6 L3 64-1000 ≤7≤7≤7≤7≤7≤7≤7≤7标准背隙P2 L1 3-10. ≤6≤6≤6≤6≤6≤6≤6≤6 L2 9-100 ≤8≤8≤8≤8≤8≤8≤8≤8 L3 64-1000 ≤10≤10≤10≤10≤10≤10≤10≤10容许径向力F1 N L1L2L3 3-1000 780 850 2250 4700 6400 8500 40000 60000 容许轴向力F2 N L1L2L3 3-1000 390 450 1100 2350 3700 4250 20000 30000 使用寿命h L1L2L3 3-1000 20000效率η%L1 3-10. 97% 97% 97% 97% 97% 97% 97% 97% L2 9-100 94% 94% 94% 94% 94% 94% 94% 94% L3 64-1000 91% 91% 91% 91% 91% 91% 91% 91%重量kg L1 3-10. 0.5 1.4 4.2 9.2 20 34 48 90 L2 9-100 0.8 1.9 5.2 11.3 24.5 42 60 115 L3 64-1000 1.1 2.4 6.2 13.2 28 50 72 140噪音dB L1L2L3 3-1000 ≤58≤58≤65≤65≤70≤70≤75≤75使用温度℃L1L2L3 3-1000KB系列精密行星减速机转动惯量:规格单位段数速比KB40 KB60 KB90 KB115 KB142 KB180 KB220 KB280转动惯量kg.cm²L13/4/5. 0.03 0.18 0.75 2.85 12.4 15.3 34.8 44.9 7-10. 0.018 0.12 0.45 1.95 8.1 14.8 28.6 39.2 L29-50 0.023 0.15 0.52 2.15 7.6 15.2 32.2 41.8 70-100 0.018 0.072 0.38 1.85 6.9 14.6 26.7 32.6 L364-350 0.016 0.07 0.36 2.05 6.3 14.2 18.3 28.1 400-1000 0.016 0.065 0.29 1.65 4.3 12.6 13.7 22.5配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)200W 70 4-M4 ф11(F7)35 ф50(H7) 5 64 126 145 164400W 70 4-M4 ф14(F7)35 ф50(H7) 5 64 126 145 164配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)400W 70 4-M4 14F7 35 50(H7) 5 90 165 188 211 750W 90 4-M5 19F7 35 70(H7) 5 90 165 188 211 1000W 115 4-M8 19F7 55 95(H7) 5 130 185 208 231配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)750W 90 4-M6 19F7 55 70(H7) 10 130 203 235 259 1500W 145/130 4-M8 22/24F7 65 110(H7) 10 130 213 245 269 2000W 165 4-M10 32F7 65 130(H7) 10 150 233 265 389配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
伺服电机台达伞齿轮减速机
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
台达安川松下5.5KW伺服电机减速机180电机边框减速机AB180单级
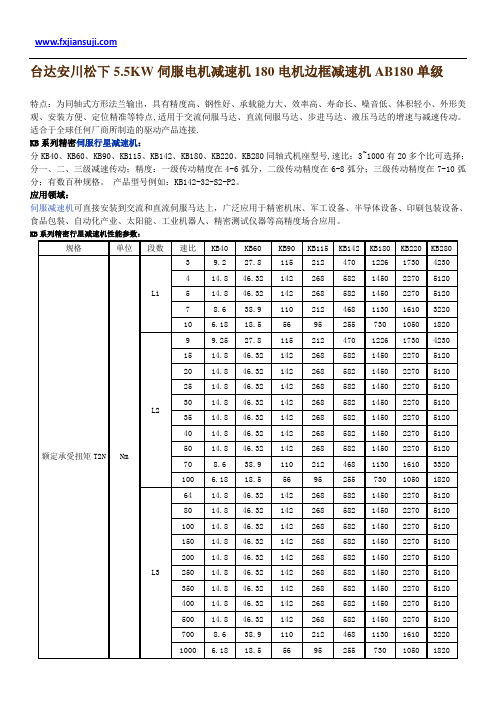
特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列精密伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB系列精密行星减速机性能参数:KB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
机器人常用的减速机

1
机器人常用的减速机
谐波减速器功能及特点 5. 结构简单、零件数少、安装方便。仅有三个基本构件,且输入与输出轴同轴 线,所以结构简单,安装方便。 6. 体积小、重量轻。与一般减速机比较,输出力矩相同时,谐波齿轮减速机的 体积可减小2/3,重量可减轻1/2。 7. 可向密闭空间传递运动。利用柔轮的柔性特点,轮传动的这一可贵优点是现 有其他传动无法比拟的。
2/9
1
机器人常用的减速机
RV减速器功能及特点 1. 如果传动机构置于行星架的支撑主轴承内,那么这种传动的轴向尺寸可大大 缩小。 2. 采用二级减速机构,处于低速级的摆线针轮行星传动更加平稳,同时由于转 臂轴承个数增多且内外环相对转速下降,其寿命也可大大提高。 3. 只要设计合理,就可以获得很高的运动精度和很小的回差。 4. RV传动的输出机构是采用两端支撑的尽可能大的刚性圆盘输出结构,比一般 摆线减速器的输出机构具有更大的刚度,且抗冲击性能也有很大提高。 5. 传动比范围大。因为即使摆线齿数不变,只改变渐开线齿数就可以得到很多 的速度比。其传动比i=31—171。 6. 传动效率高,其传动效率η=0.85—0.92
谐波减速器 工业机器人中安装的谐波减速器,它主要由刚轮,也就是带有内齿圈的刚性
齿轮,相当于行星系中的中心轮;柔轮,带有外齿圈的柔性齿轮,相当于行星齿 轮;波发生器H,相当于行星架,这三个基本构件组成的。三个构件中可任意固 定一个,其余两个一为主动,一为从动,可实现减速或增速(固定传动比),也 可变成两个输入,一个输出,组成差动传动。作为减速器使用,通常采用波发生 器主动、刚轮固定、柔轮输出形式。
0/9
1
机器人常用的减速机
RV减速器
1 2
7 3
4
浙江来福谐波减速器
2016年5月合研制开发多款适用不同工况的专用谐波一般工作温度:0℃~40℃润滑效果好、轮齿表面附着力高等特点。
可的最小力矩一体式波发生器上的轴向力发生运动。
向力向柔轮内部方向运动。
方向相反。
波发生器轴向力的设计定时,请务必咨询授权代理商波发生器的标准孔径如各外形尺寸图所示,但可以在表上所示的效长度尺寸,请设计成38394041LHT-IV型谐波减速器性能参数表LHT-IV系列柔轮为中空翻边型标准筒结构,减速器 内孔设计有支撑轴承,全密封结构,安装简便,为轴输入 形式,适用于同步带连接及需要轴输入的场合使用。
型号速比输入2000r/min 时的额定转矩起动停止时的 容许峰值转矩平均负载转矩的 容许最大值瞬间容许 最大转矩容许最高 容许平均 输入转速 输入转速 (脂润滑) (脂润滑)背隙重量设计寿命Nm 50 14 80 100 50 17 80 100 50 80 20 100 120 50 80 25 100 120 50 80 32 100 120 160 87 87 99 153 178 178 178 52 52 51 82 7 10 10 21 29 31 33 44kgfm 0.7 1 1 2.1 2.9 3.1 3.3 4.5 5.3 5.3 5.2 8.4 8.9 8.9 10 16 18 18 18Nm 23 30 36 44 56 70 73 96 107 113 127 178 204 217 281 395 433 459 484kgfm 2.3 3.1 3.7 4.5 5.7 7.2 7.4 9.8 10.9 11.5 13 18 21 22 29 40 44 47 49Nm 9 14 14 34 35 51 44 61 64 64 72 113 140 140 140 217 281 281 281kgfm 0.9 1.4 1.4 3.4 3.6 5.2 4.5 6.2 6.5 6.5 7.3 12 14 14 14 22 29 29 29Nm 46 61 70 91 113 143 127 165 191 191 242 332 369 395 497 738 841 892 892kgfm 4.7 6.2 7.2 9 12 15 13 17r/minr/minArc SecKgHour70003000≤300.661000065003000≤300.95100005600 20 20 25 34 4800 38 40 51 75 86 91 91 40003000≤301.35100003000≤302.1100003000≤304.1100004243IVIV4445IVIV4647IVVLHT-V系列柔轮为中空翻边型标准结构,整机结 构紧凑,波发生器为大口径中空孔,带有交叉滚子轴 承,来承受径向与轴向的负载此结构为简易型,方便 用户定制安装。
伺服电机如何进行选型

伺服电机选型技术指南1、机电领域中伺服电机的选择原那么现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。
首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
各种电机的T-ω曲线〔1〕传统的选择方法这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度ω(t),角加速度α(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。
很显然。
电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两局部,但在实际的传动机构中它们是受限制的。
用ω峰值,T峰值表示最大值或者峰值。
电机的最大速度决定了减速器减速比的上限,n上限=ω峰值,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不适宜的。
反之,那么可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。
只用峰值功率作为选择电机的原那么是不充分的,而且传动比的准确计算非常繁琐。
〔2〕新的选择方法一种新的选择原那么是将电机特性与负载特性别离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比拟更方便,另外,还提供了传动比的一个可能范围。
这种方法的优点:适用于各种负载情况;将负载和电机的特性别离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机。
因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。
在电机和负载之间的传动比会改变电机提供的动力荷载参数。
比方,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。