四节传送带(DOC)
PLC四节传送带设计
《PLC设计与实训》设计报告题目:四节传送带控制`姓名:王伟杰班级:14自动化4班学号:30指导老师:陈才学提交日期:2017年6月14日目录摘要: (3)一、总体设计方案 (3)设计题目及任务 (3)任务分析 (3)课题项目管理计划进度表 (3)设计目标 (3)设计方案及方案的合理性分析 (3)二、硬件电路设计 (3)CPU选型 (3)I/O口分配 (3)硬件电路图 (3)电路工作过程 (3)顺序启动 (3)顺序停止 (3)传送带A发生故障时的停止 (3)传送带B发生故障时的停止 (3)传送带C发生故障时的停止 (3)传送带D发生故障时的停止 (3)三、软件程序设计 (3)程序功能图设计 (3)软件程序单元设计 (3)顺序启动设计 (3)顺序停止设计 (3)顺序急停设计 (3)四、系统调试过程及结果分析 (3)硬件调试过程 (3)软件调试过程(含单独调试和联调) (3)设计实验结果及分析 (3)五、心得体会和持续改进建议 (3)附件: (3)1、系统运行和测试照片 (3)2、设计环节与课程能力对应关系 (3)3、成绩考核与评定 (3)设计题目(四节传送带控制)摘要:当今社会,科技发展迅速,在工业方面,计算机技术、半导体技术、控制技术、数字技术、通信网络技术等高新技术的发展息息相关,这些高新技术同样也推动了PLC(可编程逻辑控制器)的发展。
现在,我们的生活中有很多称为可编程控制器的小电脑在为我们服务,可编程控制器在工业控制、军工航天、信息处理、家用电器等方面的应用中表现的十分出色。
本次设计的题目是:四节传送带控制,主要以PLC来控制,使其具备顺序启动与顺序停止功能,当某条皮带发生故障时,该皮带及前面的皮带立即停止的自动控制等功能。
通过这次设计,初步掌握PLC的基本控制功能,学会使用PLC来解决一些简单的工程问题。
关键词:PLC;工业控制;四节传送带;顺序控制一、总体设计方案设计题目及任务题目2四节传送带控制(难度系数:***)控制要求1.总体控制要求:系统由传动电机M1、M2、M3、M4,故障设置开关A、B、C、D 组成,完成物料的运送、故障停止等功能。
四节传送带的模拟

I/O分配表
输入端口 外部电器 SB1 SB2 A B C D 对应输入点 I0.0 I0.1 I0.2 I0.3 I0.4 I0.5 输出端口 外部电器 KM1 KM2 KM3 KM4 对应输出点 Q0.1 Q0.2 Q0.3 Q0.4
四节传送带的模拟原理图
CPU 226 CN SB1 SB2 A B I0.0 I0.1 I0.2 I0.3 I0.4 I0.5
四节传送带的模拟
宜都市职业教育中心:蔡鹏
实验模块介绍(一)
KM1
A
KM2
B
KM3
C
SB1 SB2
KM4
启动
停止
D
KM1
KM2
KM3
KM4SB1Biblioteka SB2AB
C
D
0V
实验模块介绍(二)
SB1 SB2 A B C D 0V KM1 KM2 KM3 KM4
启动
停止
故 障
检 测 开 关
KM1
KM2
KM3
KM4
编程步骤
*根据系统控制要求划分编程步骤
1、启动; 2、停止; 3、故障停机;
编程方法小结
首先根据系统控制要求划分编程
步骤;然后根据编程步骤编写负责相 关功能的指令;最后通过调试程序对 程序进行完善。
作业
编写四节传送带的程序
输入单元电路
输出单元电路 输出单元电路 输出单元电路 输出单元电路
Q0.1
KM1 KM2 KM3 KM4
输入单元电路
输入单元电路 输入单元电路 输入单元电路 输入单元电路
Q0.2 Q0.3 Q0.4
输
C D
输 出
入
DC 24V L GND M
PLC课程设计 四节传送带的模拟

PLC课程设计四节传送带的模拟
四节传送带模拟
传送带技术是一种广泛使用的生产装置,广泛应用于物流、食品、机械制造行业,用来运送物品、材料或任何重要信息,从而提高生产效率,减少劳动力成本。
四节传送带模拟(simulating-four-chained-conveyors)由四节相互连接的传送带装置所组成,每节传送带可以自由移动,起到转移物料的作用,传送速度、载荷均可调节,广泛应用在工业生产上。
四节传送带模拟的实现原理:使用PLC(程序控制器)和传感器(如光电、按钮),通过反馈调节四节传送带的运转情况,传感器感知物料或信息,输出信号驱动电机从而运转,起到转移物料的作用,同时可以进行物料计数,增强传送精准度。
1、使用PLC来控制电机,根据传送带的载荷情况及当前物料数量等,设置电机的U、V及W相控制;
2、在传输带上安装光电传感器,实时收集物料信息,通过反馈给PLC,给出每个节点的位置信息;
3、设置PLC的输出控制信号,控制传送带的每节电机的启动、停止及变速;
4、安装在进料点上的按钮,用于调节每节传送带上物料的数量,如有必要时,还可开启手动模式,使用人工参与调速;
5、安装在出料点上的按钮,用于实现物料在出料处的控制,是否停止传送。
综上所述,四节传送带的模拟借助PLC技术和传感器,借助按钮来实现模拟操控,配合调节设备可以实现四节传送带的运行及调节,进而提高生产效率,实现生产的自动化。
PLC四节传送带资料
湖南工程学院课程设计课程名称测控技术与系统课题名称四节传送带的模拟专业班级测控技术0981班姓名YW学号指导教师谭梅、沈细群2013年1月7日湖南工程学院课程设计任务书课程名称电气控制与PLC 课题名称四节传送带的模拟专业班级测控技术0981姓名学号指导教师谭梅、沈细群审批黄峰任务书下达日期2013年01月7日课程设计完成日期2013年01月18日课题四节传送带的模拟任务描述与控制要求有一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下:启动时先起动最末一条皮带机,经过5秒延时,再依次起动其它皮带机。
停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。
当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完后才停止。
例如M2故障,M1、M2立即停,经过5秒延时后,M3停,再过5秒,M4停。
当某条皮带机上有重物时,该皮带机前面的皮带机停止,该皮带机运行5秒后停,而该皮带机以后的皮带机待料运完后才停止。
例如,M3上有重物,M1、M2立即停,过1秒,M3停,再过5秒,M4停。
目录第 1 章概述 (1)1.1PLC的概述 (1)1.2 PLC的主要功能 (1)1.3PLC的主要特点 (2)第2 章S7-200的配置及组态概述 (3)2.1 PLC的基本结构 (3)2.2 PLC的工作原理 (4)第3章系统方案设计 (5)3.1 系统总体设计 (5)3.2 硬件系统设计 (6)3.22 选择PLC型号 (7)3.23 基本单元 (7)3.24 编程器 (8)3.25 输/入输出接线 (8)第4 章系统程序设计 (9)4.1 系统顺序功能图 (9)4.2 发生故障时的流程图 (10)4.3 梯形图设计 (11)第5 章程序调试结果与分析 (12)第6章结束语 (13)参考文献 (14)附录 (15)评分表 (16)第1章概述1.1 PLC的概述程式控制器在发表初期被称为(Programmable Logic -Controller)简称PLC, 最先的目的是取代继电器,。
四节传送带报告

CHANGZHOU INSTITUTE OF TECHNOLOGY设计说明书项目名称:PLC课程设计-四节传送带的模拟控制二级学院:电子信息与电气工程学院专业:电气工程及其自动化班级:学生姓名:指导教师:职称:讲师目录第一章概述 (1)1.1 设计背景 (1)1.2 意义 (1)第二章控制要求 (3)2.1 具体要求 (3)2.2 四节传送带的模拟实验面板图 (3)第三章控制方案 (4)3.1 PLC的选型 (4)3.2 I/O分配表 (5)3.3 系统设计流程示意图 (6)第四章电气原理图 (8)4.1 PLC控制系统设计的基本原则 (8)4.2 实验任务 (9)4.3 工作原理 (9)第五章电气柜体设计 (12)5.1 引言 (12)5.2 电气柜总体配置设计 (12)5.2.1组件的划分 (12)5.2.2 电气柜各部分及组件之间的接线 (12)5.3 电器元件布置图的设计与绘制 (13)5.4 电气部件接线图的绘制 (14)5.5 电气柜、箱及非标准零件图的设计 (14)5.6 元件清单 (15)5.7 柜体外形图 (15)5.8 柜体布置图 (17)第六章程序设计 (18)6.1 实验说明 (18)6.2 四节传送带的梯形图分析 (18)第七章四节传送带控制系统的模拟 (23)7.1 实验说明 (23)7.2 模拟步骤 (24)7.3 进行调试 (26)7.4 实验现象 (27)总结 (28)参考文献 (37)第一章概述1.1 设计背景17世纪中,美国开始用架空索道传送散状物料;19世纪中叶,各种现代结构的传送带输送机相继出现。
皮带式传送带设备1868年,在英国出现了皮带式传送带输送机;1887年,在美国出现了螺旋输送机;1905年,在瑞士出现了钢带式输送机;1906年,在英国和德国出现了惯性输送机。
此后,传送带输送机受到机械制造、电机、化工和冶金工业技术的影响,不断完善,逐步由完成车间内部的传送,发展到完成在企业内部、企业之间甚至城市之间的物料搬运,成为物料搬运系统机械化和自动化不可缺少的组成部分。
四节传送带模拟控制系统实习任务

四节传送带模拟控制系统
一、控制要求
1、有四条皮带运输机构成的传送系统,分别由四台电动机M1、M
2、M
3、M4带动。
起动时,起动最末端的皮带机M4,每隔5s在倒序依次起动其他的皮带机;停止时,先停止最前面的皮带机M1,每隔5s再依次顺寻停止其他的皮带机。
2、当某条皮带机发生故障时,该皮带机及前面的皮带机都应立即停止,以后的皮带机每隔5s顺序停止。
例如M2故障时,M1M2立即停止,经过5s延时后,M3停止,再过5s,M4停止。
3、当某条皮带机有重物时,其前面的皮带机都应立即停止,该皮带机运行5s后停止,以后的皮带机每隔5s顺序停止。
例如M3上有重物,M1、M2立即停止,经过5s延时后,M3停止,再过5s延时后,M4停止,依次类推。
4、系统运行、停止、故障需有指示灯指示。
(故障时指示灯需闪烁)
二、任务要求
1、根据控制要求搜集资料,制定I/O表,设计系统硬件接线图,设计完成后交指导老师,通过后,领取实训教材;
2、按照硬件接线图,进行实物连接;
3、接线成功后,向指导老师申请硬件连线测试;
4、在电脑上编制PLC控制程序,并下载,调制;
5、调试成功后,向指导老师申请测试;
6、测试完成后,拆线、归还设备,撰写实训报告。
PLC实验报告:四节传送带的模拟-毕业设计(论文)word格式
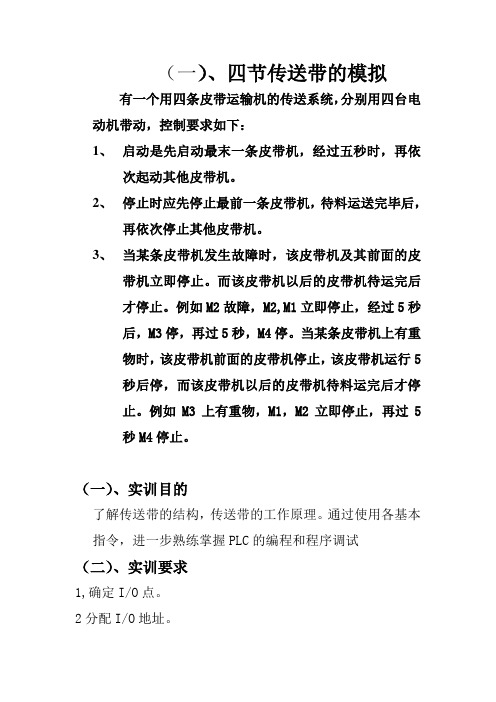
(一)、四节传送带的模拟有一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下:1、启动是先启动最末一条皮带机,经过五秒时,再依次起动其他皮带机。
2、停止时应先停止最前一条皮带机,待料运送完毕后,再依次停止其他皮带机。
3、当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止。
而该皮带机以后的皮带机待运完后才停止。
例如M2故障,M2,M1立即停止,经过5秒后,M3停,再过5秒,M4停。
当某条皮带机上有重物时,该皮带机前面的皮带机停止,该皮带机运行5秒后停,而该皮带机以后的皮带机待料运完后才停止。
例如M3上有重物,M1,M2立即停止,再过5秒M4停止。
(一)、实训目的了解传送带的结构,传送带的工作原理。
通过使用各基本指令,进一步熟练掌握PLC的编程和程序调试(二)、实训要求1,确定I/O点。
2分配I/O地址。
3画出PLC与I/O的链接线图。
4编程,上机调试。
(三)、实训设备1、THSMS-A型、THSMS-B型实验装置一台2、安装了STEP7-Micro/WIN32编程软件的计算机一台3、PC/PPI编程电缆一根4、锁紧导线若干(四)实验内容:1,确定I/O点6个I点分别为:SB1(启动),SB2(停止),A(M1故障输入),B(M2故障输入),C(M3故障输入),D(M4故障输入)。
4个O点分别为:M1,M2,M3,M42,分配I/O地址。
3,PLC与I/O的连接线图4,程序(梯形图,语句表)ORGANIZATION_BLOCK 主程序:OB1TITLE=程序注释BEGINNetwork 1 // 网络标题// 网络注释LPSTON T37, 50LRDTON T38, 100 LPPTON T39, 150 Network 2TON T40, 50 Network 3LD T40TON T41, 50 Network 4LD T41TON T42, 50 Network 5LD T42Network 6LD T37Network 7LD T38Network 8LD T39END_ORGANIZATION_BLOCK SUBROUTINE_BLOCK SBR_0:SBR0TITLE=子程序注释BEGINNetwork 1 // 网络标题// 网络注释END_SUBROUTINE_BLOCK INTERRUPT_BLOCKINT_0:INT0TITLE=中断程序注释BEGINNetwork 1 // 网络标题// 网络注释END_INTERRU PT_BLOCK5、程序设计及工作过程分析按下启动按钮SB1,动合触点闭合,保持闭合,皮带机M4运动,此时T37开始计时,5s后皮带机M3起动,依次通过计时器T38,T39控制皮带机M2,M1的起动。
plc四节传送带课程设计
plc四节传送带课程设计一、课程目标知识目标:1. 学生能理解PLC(可编程逻辑控制器)的基本工作原理及其在工业自动化中的应用。
2. 学生能够掌握传送带系统的基本组成部分及其功能。
3. 学生能够运用PLC编程实现对传送带启停、方向控制及速度调节的指令编写。
技能目标:1. 学生能够运用所学知识,设计简单的PLC传送带控制系统,并进行模拟调试。
2. 学生能够通过团队协作,解决实际PLC传送带控制过程中遇到的问题。
3. 学生能够运用工程思维,优化传送带控制系统的设计方案。
情感态度价值观目标:1. 学生能够认识到PLC技术在工业自动化中的重要性,增强对工业自动化技术的兴趣。
2. 学生通过团队协作,培养沟通与协作能力,增强团队意识。
3. 学生能够在学习过程中,关注工程伦理问题,树立正确的价值观。
课程性质:本课程为实践性课程,旨在帮助学生将理论知识应用于实际工程案例中,提高学生的实践操作能力。
学生特点:学生为高中二年级学生,具备一定的物理和数学基础,对新鲜事物充满好奇,喜欢动手实践。
教学要求:教师应注重理论与实践相结合,引导学生通过实际操作,掌握PLC 传送带控制系统的设计方法。
同时,关注学生的情感态度价值观培养,提高学生的综合素质。
在教学过程中,将课程目标分解为具体的学习成果,以便进行教学设计和评估。
二、教学内容1. 理论知识:- PLC基本原理与结构- 传送带系统的组成及其工作原理- PLC编程基础,包括逻辑运算、梯形图、指令系统等2. 实践操作:- PLC传送带控制系统的设计流程- 编程软件的使用与操作- PLC与传送带系统的连接与调试3. 教学大纲:- 第一周:PLC基本原理与结构学习,了解传送带系统组成- 第二周:PLC编程基础,学习梯形图及指令系统- 第三周:设计简单的PLC传送带控制系统,进行模拟调试- 第四周:实际操作,连接PLC与传送带系统,优化设计方案4. 教材章节:- 《自动化控制技术》第三章:PLC及其应用- 《自动化控制技术》第四章:PLC控制系统设计教学内容安排注重科学性和系统性,理论与实践相结合。
四节传送带控制系统
实验报告要求
• 1.列出输入/输出地址分配表。 • 2、画出控制系统主电路、控制电路(PLC 外部接线图),要求主电路画出实际控制 系统图,器件的实际选型。 • 3、写出PLC控制程序(梯形图),阐述调 试过程。 • 4、阐述PLC控制程序与电气控制系统控制 原理,重点利用所学的专业知识分析观察 到的的现象、实验中出现的问题、解决的 方法及实验的结果。
四节传送带起停控制
• 指导老师:付邦胜
控制要求
一个由四条皮带运输机组成的传送系统,分别用 四台三相笼型异步电动机带动。 ① 工作时应按照M4—M3—M2—M1逆序启动,启动 时间间隔为5秒;停机时应依照M1—M2—M3—M4顺 序停机,且必须待各皮带机上的料运送完毕(延时8 秒)后才能停。 ② 当某条皮带机发生故障时,该皮带机及其前面的皮带 机应立即停止,而后面的皮带机必须待物料运送完毕 (延时8秒)后顺序停止。如M2故障,M1、M2立即 停机,延时8秒后,M3停,再延时8秒,M4停机。
题目分析
• 输入: 启动按钮,停 车按钮,M1故障,M2 故障,M3故障;M4故 障。 • 输出:M1指示灯,M2 指示灯,M3指示灯, M4指示灯。 • 顺序启动电机,逆序 停止电机
题目要点
• • • • • • 按照要求,实现传动带的启动、停止功能。 在某条皮带机发生故障时,相关动作的实现。 思考并实现下面的功能: 如果在启动的过程中,某台电机故障,如何处理? 如果在停止过程中,某台电机故障,如何处理? 如果故障停车后,是否允许马上启动,如何保证 正确的工作状态?
实验四-四节传送带的模拟控制
实验四-四节传送带的模拟控制实验背景传送带是一种在工业生产中广泛使用的机械设备,主要用于运输物品或产品。
在实际生产中,传送带的控制通常是自动化的,可以通过编程或电路设计来实现。
本次实验旨在模拟控制四节传送带的运动,以加深对传送带的控制理解。
实验内容实验器材•Arduino Uno开发板•USB数据线•4个直流电机•4个 TIP120功率三极管•面包板•杜邦线•连线工具实验原理本实验的四节传送带模型如下图所示:---------------| ① |---------------|| |||| |||| ||---------------| ② |---------------|| |||| |||| ||---------------| ③ |---------------|| |||| |||| ||---------------| ④ |---------------其中,①、②、③、④分别代表四节传送带。
四节传送带均由一个直流电机驱动,电机的控制采用PWM控制方式,由Arduino板的数字输出口控制。
TIP120功率三极管用于驱动电机,保证电机能够得到足够的电流。
根据传送带的物料流转实际,本实验采用了如下控制方式:1.最开始,四节传送带均停止运动,物品位于第一节传送带上。
2.首先,第一节传送带启动运动,将物品向第二节传送带上运动。
3.当物品运动到第二节传送带上时,第一节传送带停止运动,第二节传送带启动运动,将物品向第三节传送带上运动。
4.当物品运动到第三节传送带上时,第二节传送带停止运动,第三节传送带启动运动,将物品向第四节传送带上运动。
5.当物品运动到第四节传送带上时,第三节传送带停止运动,第四节传送带启动运动,将物品运出实验器材。
根据上述控制方式,可以实现四节传送带的物料流转。
具体的控制代码将在下一节中介绍。
实验步骤1.连接电路将4个电机分别连接到TIP120功率三极管的基极上。
将每个TIP120功率三极管的集电极连接到Arduino Uno开发板的GND上,隔离二极管的发射极和Arduino Uno的数字引脚。
四节传送带梯形图

系统开始程序网络 1I0.0接通,KM4立即运转//STONIN100 msPT I0.0I0.5T39Q0.41M0.0M0.0T3710网络 2KM4运转1秒后KM3运转S TONIN100 msPT T37Q0.31T3810网络 3KM3运转1秒后KM2运转S TONIN100 msPT T38Q0.21T3910网络 4KM2运转1秒后KM1运转S T39Q0.11系统停止程序网络 5I0.5接通,KM1立即运转//RTONIN100 msPTI0.5I0.0T42Q0.11M1.0M1.0T4010网络 6KM1停转1秒后KM2停转R TONIN100 msPT T40Q0.21T4110网络 7KM2停转1秒后KM3停转R TONIN100 msPT T41Q0.31T4210网络 8KM3停转1秒后KM4停转R T42Q0.41KM1故障处理程序网络 9KM1出现故障,KM1立即停转R I0.1Q0.11TONIN100 msPT T4310网络 10KM1停转1秒后KM2停转R TONIN100 msPT T43Q0.21T4410网络 11KM2停转1秒后KM3停转R TONIN100 msPT T44Q0.31T4510网络 12KM3停转1秒后KM4停转R T45Q0.41KM2故障处理程序网络 13KM2出现故障,KM1、KM2立即停转R TONIN100 msPT I0.2Q0.12T4610网络 14KM2停转1秒后KM3停转R TONIN100 msPT T46Q0.31T4710网络 15KM3停转1秒后KM4停转R T47Q0.41KM3故障处理程序网络 16KM3出现故障,KM1、KM2、KM3立即停转R TONIN100 msPT I0.3Q0.13T4810网络 17KM3停转1秒后KM4停转R T48Q0.41KM4故障处理程序网络 18KM4出现故障,KM1、KM2、KM3、KM4立即停转R I0.4Q0.14。
专业综合设计(四节传送带)

PLC作为通用工业控制计算机,是面向工矿企业的工控设备。它接口容易,编程语言易于为工程技术人员接受。梯形图语言的图形符号与表达方式和继电器电路图相当接近,只用PLC的少量开关量逻辑控制指令就可以方便地实现继电器电路的功能。为不熟悉电子电路、不懂计算机原理和汇编语言的人使用计算机从事工业控制打开了方便之门。
(6)PLC的应用领域
目前,PLC在国内外已广泛应用于钢铁、石油、化工、电力、建材、机械制造、汽车、轻纺、交通运输、环保及文化娱乐等各个行业。 开关量的逻辑控制是PLC最基本、最广泛的应用领域,它取代传统的继电器电路,实现逻辑控制、顺序控制,既可用于单台设备的控制,也可用于多机群控及自动化流水线。如注塑机、印刷机、订书机械、组合机床、磨床、包装生产线、电镀流水线等。
集成modem支持:内置modem功能,可进行远程编程、诊断或数据传输编程不需MPI转换器,直接通过PC上的RS232口现场总线通讯功能.控制器功能中已集成了Profibus DP Master / Slave, Profibus FMS和LONWorks。
3.2 下位机编程
首先需要编程的部分为启动程序,由启动开关输入I0.0和结束开关输入I0.5构成启保停程序,然后在此程序中插入上位机输入断点M2.0和M2.5来实现上位机的控制,输出四号带启动信号,并且为存储器M0.1置一;启动四号带后进入5s延时,5s过后启动三号带,再进入5s延时,5s后启动二号带,延时5s,5s后启动一号带。启动程序编辑完,编程结束程序,与启动程序类似,反方向依次关闭。启动和结束程序完成后,进行故障判定反应程序,当故障输入开关I0.1输入时,一号带输出Q0.1输出置零,延时5s二号带输出Q0.2置零,延时5s三号带输出Q0.3置零,延时5s四号带输出Q0.4置零;当故障输入开关I0.2输入为1时,一二号带输出Q0.1、Q0.2同时置零,延时5s三号带输出Q0.3置零,延时5s后四号带输出Q0.4置零,故障I0.3I0.4的输入时与故障I0.1I0.2同理,整体程序如下图:
四节传送带PLC控制系统设计设计
湖南工业职业技术学院Hunan Industry Polytechnic类别毕业设计控制系统设计题四节传送带目PLC系名称电气工程系专业及班级S2012-8机电班奇冯生学姓名09 学号指导教师张老师摘要可编程逻辑控制器,它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。
现今的社会,科技发展迅速,在工业方面,计算机技术、半导体技术、控制技术、数字技术、通信网络技术等高新技术的发展息息相关,这些高新技术推动了PLC的发展。
今天,我们的生活环境和工作环境有越来越多称之为可编程控制器的小电脑在为我们服务,可编程控制器在工业控制,尖端武器,通信设备,信息处理,家用电器等各测、控制领域的应用中独占鳌头。
本四级传送带电路采用PLC为控制核心,具备顺序起动和顺序停止功能,当某条皮带机发生故.障时,该皮带机及其前面的皮带机立即停止的自动控制等功能。
利用本次设计,初步掌握PLC的基本控制功能,学会运用PLC,控制基本工业控制。
关键词: PLC 传送带皮带机控制技术基于PLC控制四节转送带设计目录 (1).摘要前言 (3).第1章;四节传送带的说明 (5)1.1PLC概述…………………………………………………….5-61.2 四节传送带的发展………………………………….1.3 四节传送带的概述……………………………………….6-8第2章;材料的选择及清单 52.1 PLC的选型 (5)2.2 电器元件的选择 (5)第3章;系统的硬件设计 (6)3.1 主电路设计 (6)3.2 I/O分配表及接线图 (7)3.3 梯形图设计 (8)3.4 指令语句表程序 (13)3.5 系统调试 (18)总结 (21)致谢 (22)参考文献 (22)前言随着科技的飞速发展,无论在日常生活中,还是在工农业发展中,PLC 具有广泛的应用。
四节传送带工作过程

四节传送带工作过程嘿,咱今儿就来说说这四节传送带的工作过程。
你想想啊,这四节传送带就好像是四条不知疲倦的小毛驴,驮着货物不停地跑呀跑。
先看第一节传送带,它就像是个急先锋,总是第一个冲上去迎接货物。
货物一到,它就“嘿哟”一声,稳稳地接住,然后马不停蹄地往前送。
接着呢,货物就来到了第二节传送带。
这第二节呀,就像是个沉稳的大哥,不慌不忙地接着,稳稳地运输着。
它可不像第一节那么着急,而是慢悠悠地,仿佛在说:“急啥呀,咱稳稳地来。
”然后呀,货物就到了第三节传送带。
这第三节可有意思啦,它就像是个调皮的孩子,有时候速度快,有时候速度慢,把货物逗得晕头转向的。
但它也是很重要的一环呀,没了它可不行。
最后呢,就是第四节传送带啦。
它就像是个大功告成的胜利者,把货物安全地送到目的地。
它会得意地说:“嘿嘿,看我多厉害,把货物都送到啦!”这四节传送带呀,它们各自有着自己的特点和作用,少了谁都不行。
它们就像是一个团队,紧密合作,共同完成运输货物的任务。
你说这像不像我们生活中的团队呀?大家都有自己的分工,一起为了一个目标努力。
在这个过程中,要是哪一节传送带出了问题,那可就麻烦啦!就好像一个团队里有人掉了链子,整个工作都会受到影响呢。
所以呀,我们得好好爱护这四节传送带,让它们能一直好好工作。
而且你想啊,如果这四节传送带能一直顺顺利利地工作,那能为我们带来多大的便利呀!工厂里的生产效率不就大大提高了吗?这可都是它们的功劳呢!咱再回过头来想想,这看似简单的四节传送带工作过程,其实蕴含着很多道理呢。
就像我们做事情一样,要一步一个脚印,每个环节都不能马虎。
只有这样,才能把事情做好,不是吗?你说这四节传送带是不是很神奇呀?它们每天都在那里默默地工作着,为我们的生活和生产贡献着自己的力量。
咱可得好好珍惜它们呀!总之呢,这四节传送带的工作过程虽然看起来简单,但是却有着大大的学问。
我们要仔细去观察,去体会,才能发现其中的奥秘和乐趣。
怎么样,你是不是对这四节传送带的工作过程有了更深的了解啦?。
四节传送带PLC模拟控制系统

电机
驱动传送带运转的动力来源, 通常采用三相异步电机。
传送带
承载物料,通过连续运动将物 料从一个位置输送到另一个位 置。
控制系统
由PLC、继电器、接触器等组 成,用于控制电机启停、调节 传送带速度等。
工作原理
当物料放置在传送带上时,传感 器检测到物料的数量和位置信息。
PLC控制系统根据传感器反馈的 信息,控制电机的启停和转速,
进入20世纪后,随着自动化技术的不断发展,PLC等控制系 统的出现,传送带的发展也进入了新的阶段。四节传送带 PLC模拟控制系统就是其中的代表之一,它能够实现对传送 带的精确控制,提高了生产效率和产品质量。
02
四节传送带系统
系统构成
减速器
降低电机转速,增大扭矩,使 传送带能够平稳运行。
传感器
检测传送带上物料的数量、位 置等信息,为PLC控制系统提 供反馈。
特点
高可靠性、灵活性、易于编程和易于扩展等。
PLC的工作原理
输入采样
PLC读取输入端子的状态,并将 其存储在输入映像寄存器中。
程序执行
PLC按照从上到下的顺序扫描用户 程序,并根据输入映像寄存器中的 数据执行相应的逻辑运算或指令。
输出更新
在程序执行完成后,PLC将输出映 像寄存器中的数据写入到输出模块, 从而控制外部设备。
模拟控制系统的搭建
确定系统规模和要求
选择合适的PLC
根据实际需求,确定控制系统的规模和功 能要求,如控制节数、传送带速度、物料 检测等。
根据系统规模和要求,选择合适的PLC型号 和规格,确保其具有足够的输入输出点数 、处理速度和通讯能力。
配置输入输出模块
编写控制程序
根据实际控制需求,配置适当的输入输出 模块,如限位开关、传感器、电磁阀等。
四节传送带控制

摘要在四节传送带设计中,用四个电动机来控制传送带的运行,每一个电动机分别控制一节传送带,传送带的上升和下降靠电动机的正转和反转来实现。
在每一时刻只能有一个电动机运行,达到节能的作用。
四个电动机间的转换用定时器来控制。
在此四节传送带模拟控制设计中,用M1—M4四个按键分别表示传说带的启动、停止、下降、上升,当按下M3或M4时,用绿灯的移动方向来表示传说带上升或下降,用M5—M8四个按键的按下分别表示第一到第四接传送带上的物体,当相应的按键按下时,对应的红灯亮表示那一节传送带上有物体。
在传送的过程中,绿灯的流动方向表示了传送带的上升或下降,红灯的流动方向表示物体此时传到的位置。
关键字:PLC,传送带,顺序启动,模拟控制目录前言 (3)一、四节传送带PLC控制系统设计方法 (4)二、设计内容及工作原理分析 (4)1、设计方案: (4)2、流程图设计: (5)3、四节传送带模拟控制原理图的设计: (5)4、I/O接口图设计 (6)5、主电路图 (8)6、状态图设计 (8)7、梯形图设计 (9)8、传送带的工作原理 (18)三、心得体会 (19)四、参考文献 (19)五、附录 (20)附录一:程序指令表 (20)前言20世纪末期,可编程控制器的发展特点是更加适应于现代工业的需要。
从控制规模上来说,这个时期发展了大型机和超小型机;从控制能力上来说,诞生了各种各样的特殊功能单元,用于压力、温度、转速、位移等各式各样的控制场合;从产品的配套能力来说,生产了各种人机界面单元、通信单元,使应用可编程控制器的工业控制设备的配套更加容易。
可编程控制器是微机技术与传统的继电接触控制技术相结合的产物,它克服了继电接触控制系统中的机械触点的接线复杂、可靠性低、功耗高、通用性和灵活性差的缺点,充分利用了微处理器的优点,又照顾到现场电气操作维修人员的技能与习惯,特别是PLC的程序编制,不需要专门的计算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使用户程序编制形象、直观、方便易学;调试与查错也都很方便。
3实验三四节传送带模拟实验
实验三四节传送带模拟实验一、实验目的1、熟悉和掌握SET(置位)、RST(复位)的使用方法。
2、复习定时器/计数器指令的使用方法。
二、实验器材1、ZY17PLC12BC型可编程控制器实验箱 1台2、PC机或FX-20P-E编程器 1台3、编程电缆 1根4、连接导线若干三、实验原理1、置位和复位(SET/RST)说明:(1)SET指令中,X0一接通,Y0马上接通,即使X0再变成断开,Y0也保持接通。
(2)RST指令中,X1接通后,Y0马上断开,即使X1再变成断开,Y0也将保持断开。
对于M、S也是同样。
(3)对同一元件可以多次使用SET、RST指令,顺序可任意,但在最后执行的一条才有效。
(4)如果要使数据寄存器D,变址寄存器V、Z的内容清零,也可用RST指令(用常数为K0的传送指令也可得到同样的结果)。
说明:(1)使用PLS指令,元件Y、M仅在驱动输入接通后的一个扫描周期内动作(置1)。
(2)使用PLF指令,元件Y、M仅在驱动输入断开后的一个扫描周期内动作(置1)。
(3)特殊继电器不能用作PLS或PLF的操作元件。
(4)在驱动输入接通时,PLC由运行→停机→运行,此时PLS M0动作,但PLS M600(断电时由电池作后备的辅助继电器)不动作。
这是因为M600是保持继电器,即使在断电停机时也能保持。
3、控制要求本实验利用PLC控制四节传送带的运行。
传送系统由四条传送带构成,YM1,YM2,YM3,YM4分别模拟传送带1,传送带2,传送带3,传送带4并由四台电动机带动,控制要求如下:(1)给一个“启动”脉冲,起动最末一条传送带(即第4条传送带),依次延时5秒,起动其它传送带。
(2)给一个“停止”脉冲,停止最前一条传送带(即第1条传送带),依次延时5秒,停止其它传送带。
(3)若某条发生故障,“传送带N故障”有输入信号,则该传送带及其前面的传送带立即停止,以后的传送带依次延时5秒停止。
例如YM2故障,YM1,YM2立即停止,延时5秒后,YM3停,再延时5秒,YM4停。
plc四节传送带
摘要可编程序控制器,英文称Programmable Controller,简称PC。
但由于PC 和个人计算机(Personal Computer)混淆,故人们仍习惯地用PLC作为可编程序控制器的缩写。
它是一个以微处理器为核心的数字运算操作的电子系统装置,专为在工业现场应用而设计,它采用可编程序的存储器,用以在其内部存储区域执行逻辑运算、顺序控制、定时/计数和算术运算等操作指令,并通过数字式或模拟式的输入、输出接口,控制各种类型的机械或生产过程。
PLC是微机技术与传统的继电接触控制技术相结合的产物,它克服了继电器控制系统中的机械触点的接线复杂、可靠性低、功耗高、通用性和灵活性差的缺点,充分利用了微处理器的优点,又照顾到现场操作维修人员的技能与习惯,特别是PLC程序的编制,不需要专门的计算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使用户程编制形象、直观、方便易学;调试与查错也都很方便。
用户在购到所需的PLC后,只需按说明书的提示,做少量的接线和简易的用户程序的编制工作,就可灵活方便地将PLC应用于生产实践。
本课题是用PLC模拟四节传送带的工作。
用PLC控制传送带具有程序设计简单、易于操作和理解、能够实现多种功能等优点。
此系统能够实现四节传送带的倒序启动和顺序停止以及故障、重物处理等功能。
关键字:可编程序控制器四节传送带启动和停止故障和重物处理目录1 概述 (1)1.1 课程设计的目的 (1)1.2 PLC的概述 (1)1.2.1 PLC的起源 (1)1.2.2 PLC的基本组成和各部分的作用 (1)1.2.3 PLC的功能 (2)1.3 四节传送带系统的历史 (3)1.3.1 四节传动带的起源 (3)1.3.2 四节传送带系统的发展 (3)2 硬件设计 (3)2.1 控制要求 (3)2.2 四节传送带的模拟实验面板图 (4)2.3 选择PLC型号 (4)2.3.1 基本单元 (5)2.3.2 编程器 (5)2.4 系统设计流程示意图 (6)2.5 I/O分配表 (8)2.6 I/O接线图 (8)3 软件设计 (9)3.1 设计梯形图 (9)3.2 设计指令表 (18)4 调试 (22)5 结束语 (24)6 参考文献 (25)1概述1.1 课程设计的目的PLC课程设计是自动化专业的重要的实践性教学环节。
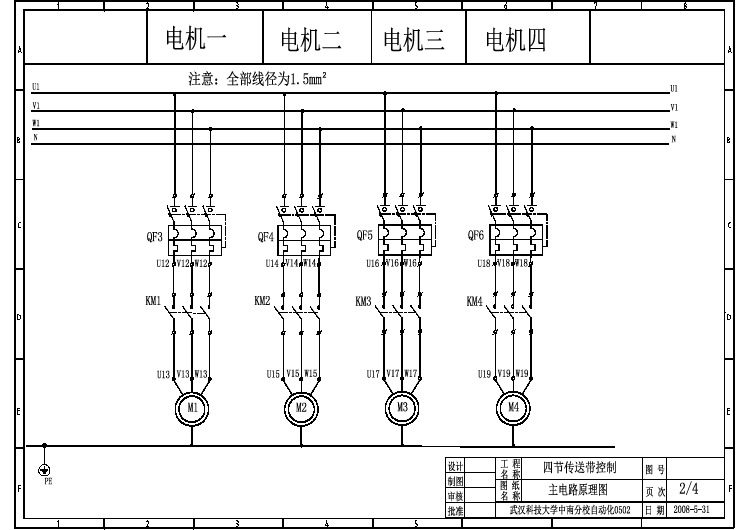
四节传送带控制主电路图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四节传送带目录一、设计目的及意义 (3)二、题目分析 (5)2.1设计目的 (5)2.2设计过程 (5)2.3设计要求 (5)三、任务要求 (6)四、总体设计 (7)1、PLC控制流程图 (7)2、PLC外部接线图 (7)3、PLC芯片型号选择 (8)4、PLC 四级传送带I/O分配表 (9)5、具体流程 (9)(1)连接I/O (9)(2)设计PLC程序 (9)(3)运行程序,查看成果 (13)(4)设计MCGS组态模拟画面 (13)(5)调试并运行 (16)6、结果分析 (18)7、出现的问题 (18)五、分工安排 (20)六、课程设计总结 (21)七、参考文献 (22)附录 (23)一、设计目的及意义可编程控制器简称PLC,是以微处理器为基础,综合了计算机技术、自动控制技术和通讯技术发展而来的一种新型工业控制装置。
它具有结构简单、编程方便、可靠性高等优点,已广泛用于工业过程和位置的自动控制中。
PLC的功能扩展也极为方便,硬件配置相当灵活,根据控制要求的改变,可以随时变动特殊功能单元的种类和个数,再相应修改用户程序就可以达到变换和增加控制功能的目的。
据统计,可编程控制器是工业自动化装置中应用最多的一种设备。
专家认为,可编程控制器将成为今后工业控制的主要手段和重要的基础设备之一,PLC、机器人、CAD/CAM将成为工业生产的三大支柱。
随着工业生产的迅速发展,市场竞争的激烈,产品更新换代的周期日益缩短,工业生产从大批量、少品种,向小批量、多品种转换,继电器—接触器控制难以满足市场要求,此问题首先被美国通用汽车公司(GM公司)提了出来。
通用汽车公司为适合汽车型号的不断翻新,满足用户对产品多样性的需求,公开对外招标,要求制造一种新的工业控制装置,取代传统的继电器—接触器控制。
其对新装置性能提出的要求就是著名的GM10条,即:(1) 编程方便,现场可修改程序;(2)维修方便,采用模块化结构;(3)可靠性高于继电器控制装置;(4)体积小于继电器控制装置;(5)数据可直接送入管理计算机;(6)成本可与继电器控制装置竞争;(7)输入可以是交流115V;(8)输出为交流115V,2A以上,能直接驱动电磁阀,接触器等;(9)在扩展时,原系统只要很小变更;(10)用户程序存储器容量至少能扩展到4K。
这十项指标就是现代PLC的最基本功能,值得注意的是PLC并不等同于普通计算机,它与有关的外部设备,按照“易于与工业控制系统连成一体”和“便于扩充功能”的原则来设计。
在大三上学期学了S7-200PLC编程及应用这门课程,了解了PLC控制的实际运用,对于PLC控制有了比较深入的了解。
通过课程设计,重新温习了一下平时上课被忽略的知识,更清楚的认识和了解PLC,对PLC的工作原理、设计方法都有了深刻的认识,对于PLC产品在生活中的运用也有了更多的了解。
实际动手设计PLC控制系统能够在以前基础上加深学生PLC的设计方法、步骤及设计原则;巩固书本知识,并将其初步运用到实际中去;从而培养和提高学生的独立工作能力;培养学生查阅书籍、参考资料、上网查询信息的能力等,从而让学生在今后解决实际工程技术问题时能够有基础。
用MCGS组态模拟软件模拟组态,通过与其他相关的硬件设备结合,可以快速、方便的开发各种用于现场采集、数据处理和控制的设备。
使我们能对工厂中对设备监控及调试有了进一步的了解。
二、题目分析2.1设计目的:1、掌握PLC功能指令的用法2、掌握PLC控制系统的设计流程2.2设计过程:1、设计一个实现四级传送带逆序启动、顺序停止的控制程序2、画出实现程序流程图。
3、列出输入、输出端口。
4、写出梯形图程序。
5、调试程序,直至符合设计要求。
6、MCGS组态设计。
7、组态调试、运行。
2.3设计要求:有一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下:启动时先起动最末一条皮带机,经过8秒延时,再依次起动其它皮带机。
停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。
当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完后才停止。
例如M2故障,M1、M2立即停,经过8秒延时后,M3停,再过8秒,M4停。
当某条皮带机上有重物时,该皮带机前面的皮带机停止,该皮带机运行8秒后停,而该皮带机以后的皮带机待料运完后才停止。
例如,M3上有重物,M1、M2立即停,经过8秒延时后,M3停,再过8秒,M4停。
传送带A、B、C、D分别为第一、二、三、四级传送带,分别由四台电机M1、M2、M3、M4带动。
三、任务要求按要求设计四节传送带程序和组态,设计并运行MCGS组态模拟界面,运行控制程序,调试程序,直到达到预定的模拟功能的要求。
具体要求如下:1、设计一个实现四级传送带逆序启动、顺序停止的控制程序2、画出实现程序流程图。
3、列出输入、输出端口。
4、写出梯形图程序。
5、调试程序,直至符合设计要求。
6、设计MCGS控制界面。
7、设计PLC控制程序。
8、设计联机调试。
四、总体设计1、PLC 控制流程图2、PLC 外部接线图2-3 外部接线图M1立即停止,M2、M3、M4每隔八秒依次停止。
M1、M2立即停止,M3、M4每隔八秒依次停止。
M1、M2、M3立即停止,M4隔八秒停止。
M1、M2、M3、M4立即停止。
M1、M2、M3、M4立即停止。
Y Y YYYM1是否故障?M2是否故障? M3是否故障?M4是否故障?是否按下停止?N N NNN开始M4、M3、M2、M1每隔八秒依次启动。
3、PLC芯片型号选择PLC的选择主要应从PLC 的机型、容量、I/O模块、电源模块、特殊功能模块、通信联网能力等方面加以综合考虑。
PLC机型选择的基本原则是在满足功能要求及保证可靠、维护方便的前提下,力争最佳的性能价格比。
选择时应主要考虑到合理的结构型式,安装方式的选择,相应的功能要求,响应速度要求,系统可靠性的要求,机型尽量统一等因素。
基本单元:S7-200系列PLC中可提供4种不同的基本型号的8种CPU供选择使用,其输入输出点数的分配如表2.1所示:S7-200系列PLC中CPU22X的基本单元表2.1 S7-200系列PLC中CPU22X的基本单元4、PLC 四级传送带I/O分配表5、具体流程(1)连接I/O (2)设计PLC程序程序如图:(3)运行程序,查看成果程序能达到预期效果增加功能:报警装置如图所示,当某个电机发生故障时,报警装置显示报警,当装置恢复正常时,报警装置自动关闭。
(4)设计MCGS组态模拟画面(5)调试并运行6、结果分析PLC程序结果:四条皮带运输机的传送系统,分别用四台异电动机M1、M2、M3、M4带动,控制过程如下:(1)启动时先按下启动按钮,起动最末一条皮带机,经过8秒延时,再依次起动其他皮带机。
(2)停止时按下I0.5按钮,这时M1皮带先停止工作,然后M2、M3、M4依次停止工作。
(3)B、C、D为故障模拟按钮,分别模拟M1、M2、M3、M4发生故障时的情况。
例如:当要模拟M1条皮带机发生故障时,只需按下按钮A即可,此时该皮带机立即停止工作,而该皮带机以后的皮带机分别间隔8秒再依次停止工作:M2在M1停止工作后8秒以后再停止(将本皮带上的货物运送待运完后才停止)。
M3在M2停止工作后8秒以后再停止。
往后依次类推。
当M2发生故障时,M1皮带机立即停止工作,而M2以后的皮带机则依次间隔8秒以后再停止工作。
M3、M4发生故障时情况与此相同。
(4)MCGS组态模拟画面实现功能与其一致。
7、出现的问题MCGS不能与PLC建立起连接,通过MCGS不能读到PLC的状态,通过更改通信口和一些数据校验方式、数据采集方式、通讯方式,最终和PLC连接了起来,而且还能进行实时通信。
模拟运行请看视频五、分工安排XXX:设计PLC程序、做PPT、答辩XXX:设计 PLC程序、设计MCGS组态、撰写项目书XXX:设计MCGS组态、撰写项目书XXX:设计 PLC程序、设计MCGS组态、答辩XXX:设计 PLC程序、撰写项目书六、课程设计总结这次课程设计在拿到题目之后,通过对题目的分析。
然后,又在网上查阅了相关资料,初步制定各个部分功能的实现方案,对各部分功能进行简单编程,完成个部分功能的独立实现;之后,将各部分程序整合到一起,进行调试,在整合和调试过程中我们未发现异常。
通过这次设计实践,我们小组成员学会了PLC的基本编程方法,对PLC的工作原理和使用方法也有了更深刻的理解。
在对理论的运用中,提高了我们的工程素质,在没有做实践设计以前,我们对知识的掌握都是思想上的,对一些细节不加重视,当我们把自己想出来的程序与到PLC中的时候,问题出现了,不是不能运行,就是运行的结果和要求的结果不相符合。
能过解决一个个在调试中出现的问题,我们对PLC 的理解得到加强,看到了实践与理论的差距。
同时,使我们的合作意识得到加强。
合作能力得到提高。
七、参考文献[1] 钟肇新. 可编程控制器原理及应用.电子工程师:计算机应用.广州:华南理工大学出版社,2000.[2] 徐世许. 可编程控制器原理. 合肥:中国科学技术出版社,2001.[3] 廖常初. PLC编程及应用[J]. 北京:机械工业出版社,2002.[4] 李景学. 可编程控制器应用系统设计方法[J]. 北京:电子工业出版社,1995.[5] 王永华. 现代电气控制及PLC应用技术[M]. 北京:北京航空航天大学出版社,2008.[6] 胡学林. 可编程控制器教程(基础篇). 北京:电子工业出版社,2004.[7] 王兆安. 电力电子设备设计和应用手册[M] 北京:机械工业出版社 2002.[8] 陈建明. 电气控制与PLC应用. 北京:电子工业出版社,2006[9] 吴作明.工控组态软件与PLC应用技术[M].北京:航空航天大学出版社,2007.0-382[10] MCGS参考手册和MCGS参考指南.附录脚本程序:脚本程序1:if M1=1 and x1<246 and x>=231 and y>=0 thenx1=x1+8if M1=0 and x1<246 thenx1=x1y1=y1endifif x1>=246 and y1<105 theny1=y1+2x1=x1+1endifif y1>=105 and x1<426 and x1>=246 and M2=1 theny1=105x1=x1+8endifif y1>=105 and x1<426 and x1>=246 and M2=0 thenx1=x1y1=y1endifif x1>=426 and y1<220 and y1>=100 thenx1=x1+1y1=y1+2endifif y1>=220 and x1<656 and x1>=426 and M3=1 theny1=220x1=x1+8endifif y1>=220 and x1<656 and x1>=426 and M3=0 thenx1=x1y1=y1endifif x1>=656 and y1<330 and y1>=220 thenx1=x1+1y1=y1+2endifif y1>=330 and x1<876 and x1>=656 and M4=1 theny1=330x1=x1+8endifif y1>=330 and x1<876 and x1>=656 and M4=0 thenx1=x1y1=y1endifif x1>=876 and y1<441 and y1>=330 and x1<=931 then y1=y1+2x1=x1+1if x1>=931 thenx1=931+8+tt=t+8y1=440endifif t>=164 and x1>=950 thenx1=0y1=0t=0endif脚本程序2:if M1=1 and x2<261 and x1>=246 and y1>=0 thenx2=x2+8endifif M1=0 and x2<261 thenx2=x2y2=y2endifif x2>=261 and y2<105 theny2=y2+2x2=x2+1endifif y2>=105 and x2<441 and x2>=261 and M2=1 then y2=105x2=x2+8endifif y2>=105 and x2<441 and x2>=261 and M2=0 then x2=x2y2=y2endifif x2>=441 and y2<220 and y2>=100 thenx2=x2+1y2=y2+2endifif y2>=220 and x2<671 and x1>=441 and M3=1 then y2=220x2=x2+8endifif y2>=220 and x2<671 and x2>=441 and M3=0 then x2=x2y2=y2endifif x2>=671 and y2<330 and y2>=220 thenx2=x2+1y2=y2+2endifif y2>=330 and x2<891 and x2>=671 and M4=1 theny2=330x2=x2+8endifif y2>=330 and x2<891 and x2>=671 and M4=0 thenx2=x2y2=y2endifif x2>=891 and y2<441 and y2>=330 and x2<=946 then y2=y2+2x2=x2+1endifif x2>=946 thenx2=946+8+tt=t+8y2=440endifif t>=164 and x2>=950 thenx2=0y2=0t=0endif脚本程序3:if M1=1 and x3<276 and x2>=246 and y2>=0 thenx3=x3+8endifif M1=0 and x3<276 thenx3=x3y3=y3endifif x3>=276 and y3<105 theny3=y3+2x3=x3+1endifif y3>=105 and x3<456 and x3>=276 and M2=1 theny3=105x3=x3+8endifif y3>=105 and x3<456 and x3>=276 and M2=0 thenx3=x3y3=y3endifif x3>=456 and y3<220 and y3>=100 thenx3=x3+1y3=y3+2endifif y3>=220 and x3<686 and x3>=456 and M3=1 theny3=220x3=x3+8endifif y3>=220 and x3<686 and x2>=456 and M3=0 thenx3=x3y3=y3endifif x3>=686 and y3<330 and y3>=220 thenx3=x3+1y3=y3+2endifif y3>=330 and x3<906 and x3>=686 and M4=1 theny3=330x3=x3+8endifif y3>=330 and x3<906 and x3>=686 and M4=0 thenx3=x3y3=y3endifif x3>=906 and y3<441 and y3>=330 and x3<=961 then y3=y3+2x3=x3+1endifif x3>=961 thenx3=961+8+tt=t+8y3=440endifif t>=164 and x3>=980 thenx3=0y3=0t=0endif脚本程序4:if M1=1 and x<231 thenx=x+8endifif M1=0 and x<231 thenx=xy=yendifif x>=231 and y<105 theny=y+2x=x+1endifif y>=105 and x<411 and x>=231 and M2=1 then y=105x=x+8endifif y>=105 and x<411 and x>=231 and M2=0 then x=xy=yendifif x>=411 and y<220 and y>=100 thenx=x+1y=y+2endifif y>=220 and x<641 and x>=411 and M3=1 then y=220x=x+8endifif y>=220 and x<641 and x>=411 and M3=0 then x=xy=yendifif x>=641 and y<330 and y>=220 thenx=x+1y=y+2endifif y>=330 and x<861 and x>=641 and M4=1 then y=330x=x+8endifif y>=330 and x<861 and x>=641 and M4=0 then x=xy=yendifif x>=861 and y<441 and y>=330 and x<=916 then y=y+2x=x+1endifif x>=916 thenx=916+8+tt=t+8y=440endifif t>=164 and x>=1000 then x=0y=0t=0endifMCGS组态模拟界面:。