ZDLX4两个自由度系统的振动
两自由度系统的振动

第四章 两自由度系统的振动前两章介绍了单自由度系统的振动,它是振动理论的基础,并有重要的应用价值。
但工程中许多实际问题是不能简化为单自由度系统的振动问题,它们往往需要简化成为多自由度系统。
两自由度系统是最简单的多自由度系统,无论是模型的简化、振动微分方程的建立和求解的一般方法,以及系统响应表现出来的振动特性等等。
两自由度系统和多自由度系统没有本质上的差别,而主要是量上的差别,因此研究两自由度系统是分析多自由度系统振动特性的基础。
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
4-1 无阻尼自由振动1.系统的振动微分方程作为两自由度振系的第一个例子,现在来分析图4-1(a )所示的双弹簧系统,设弹簧的刚度分别为k 1、、 k 2,质量为m 1、m 2。
质量的位移分别用x 1、x 2表示,并以静平衡位置为坐标原点,以向下为正。
现建立系统在静平衡位置的力学条件及振动过程中的运动微分方程。
在静平衡位置,设两弹簧的伸长分别为δ1、、δ2,则由系统的受力图 4-1(b ),得系统的静平衡条件为⎭⎬⎫=-=-+0022211221δδδk g m k k g m (a )在振动过程中,设任一瞬时t ,m 1和m 2 的位置分别为x 1和x 2,此时质量上的受力图如图4-1(c )所示。
应用牛顿运动定律,得)()(11112222111x k x x k k g m x m +--++=δδ )(12222222x x k k g m xm ---=δ 整理后得222122222112212212111)(δδδk g m x k x k x m k k g m x k x k k xm -=-+-+=-++ } (b )将方程(b )的右端和方程(a)比较,就可以消去平衡项,于是得00)(1222222212111=-+=-++x k x k xm x k x k k xm } (4-1)令 ,/,/,/)(2222121m k c m k b m k k a ==+=则(4-1)式可改写成00122211=-+=-+cx cx xbx ax x } (4-2)这是联立的二阶常系数线性微分方程组。
第二部分两自由度 系统的振动

k 0
(e)
k 3k 2 2m
得特征方程
第二部分 两自由度系统的振动
1 两自由度系统自由运动
( 2 ) 2m2 4 7mk 2 5k 2 0
(f )
固有频率为
1
k, m
2 1.5811
k m
(g)
将
代入式2(d) 1
,有
2k 12m X
0 0
(a)
设
x1(t) X1 sin(t )
(b)
x2 (t) X 2 sin(t )
第二部分 两自由度系统的振动
1 两自由度系统自由运动
代入振动微分方程组,得
(k1 k2 X1
k2) 2
(k2
m1 k3 )
X1
2
k2 X 2 m2 X
sin t
第二部分 两自由度系统的振动
2 两自由度简谐激励系统强迫振动
如下图所示,梁上有一固定转速的马达,运转时由于偏心而产生受迫振动,激振力
。马达的质量为m1、梁
的质量忽略不计,梁的刚度为k1。通过附加弹簧质量(m2,k2)系统可进行动力消振,试推导消振系统应满足的条件。
Q1 sin t
第二部分 两自由度系统的振动
1 两自由度系统自由运动 ●在一般情况下,两自由度系统的自由振动是两种不同频率的固有振动的叠加,其结果通常不再是简谐振动。
●在特殊的情况下,系统的自由振动会按某一个固有频率作固有振动,其结果是简谐振动。
初始条件的响应,由
x1 x2
C1 sin(1t C1r1 sin(1t
(4.1-11)
展开得
( 2 ) m1m2 4 (m1k22 m2k11) 2 k11k22 k122 0
《理论力学 动力学》 第十一讲 两个自由度系统的自由振动
两个自由度系统的振动理论曾凡林哈尔滨工业大学理论力学教研组本讲主要内容1、两个自由度系统的自由振动2、两个自由度系统的受迫振动1、两个自由度系统的自由振动(1)模型的简化同一物体的振动可以简化为不同的振动模型。
C研究上下平移振动研究前后颠簸振动两个自由度系统的自由振动模型112122222122()00mxk k x k x m x k x k x ++-=üý-+=þ&&&&2212121m k d m k c m k k b ==+=,,令方程变为:11221200xbx cx x dx dx +-=-+=&&&&,根据微分方程理论,可设上列方程组的解为:)sin()sin(21q w q w +=+=t B x t A x ,其中:A 、B 是振幅;ω为角频率,θ是初始相位角。
将上式代入微分方程组,得到:)sin()sin()sin(0)sin()sin()sin(22=+++++-=+-+++-q w q w q w w q w q w q w w t dB t dA t B t cB t bA t A 整理后得到:0)(0)(22=++-=--B d dA cB A b w w ,系统振动时,方程组具有非零解, 则方程组的系数行列式必须等于零,即:22=----ww d dc b —频率行列式①固有频率1、两个自由度系统的自由振动)()(24=-++-c b d d b w w 行列式展开后得到:—系统的本征方程,又称为频率方程21,22b d w +=m 2b d +=m i ω2的两个根都是实数,而且都是正数。
ii ω2的第一个根较小,称为第一固有频率。
iii ω2的第二个根较大,称为第二固有频率。
结论:两个自由度系统具有两个固有频率,这两个固有频率只与系统的质量和刚度等参数有关,而与振动的初始条件无关。
04-1 两自由度系统的振动

2 n1, n 2
ad ad 7 3 K bc 2 2 4 4 m
2
则:
K , m
2 n1
K n1 m
5K n 2 2m
5K , 2m
2 n2
3、主振型向量与振型图
振幅比:
2 a n 1 1 b
Yanshan University
主振动:系统按某一阶固有频率和相应主振型所作的振动。
第一阶主振动:
x1(1) A1(1) sin( n1t 1 )
(1) x2
(1) (1) A2 sin( n1t 1 ) 1 A1 sin( n1t 1 )
燕山大学
Yanshan University
(a ) b 0 2 c (d )
2
将上式展开得:
ω4- (a+d)ω2+(ad-bc)=0 特征根:
称为频率方程或特 征方程
2 1, 2
ad ad (ad bc) 2 2 ad ad bc 2 2
4.1.2 固有频率与主振型
设两质量块按同频率和同相位作简谐振动,即设:
燕山大学
Yanshan University
x1 A1 sin(t ) x2 A2 sin(t )
则:
1 A1 cos( t ) x 2 A2 cos( t ) x
2 K 5K m 2m 0.5 K m
燕山大学
Yanshan University
第二阶主振型 第一阶主振型
4.1.3 无阻尼自由振动的通解 由上述分析可见:
机械动力学第二章——两自由度振动讲解
k1 c1
F1(t)
m1
x1 k2
c2
F2(t)
m2
x2 k3
c3
建立坐标:x1,x2的原点分别取在m1,m 2的静平衡位置
受力分析:
F1(t)
F2(t)
k1x1
c1 x1
k2(x2-x1) m1
k2(x2-x1) m2
c2 (x2 x1) c2 (x2 x1)
k3x2
c3 x2
8
两自由度系统的振动微分方程
特解 2: x12 (t) sin 02t 2 , x22 (t) 2 sin 02t 2
由特解线性叠加可以得到通解:
x1(t) C1 sin 01t 1 C2 sin 02t 2
x2
(t
)
1C1
sin
01t
1
2C2
sin
02t
2
20
教学内容
两自由度系统的振动微分方程 两自由度系统的无阻尼自由振动 两自由度系统的强迫振动
21
两自由度系统的强迫振动
装在梁上或者板上的的转动电机,由于转子的不 平衡,或者说转子质量不均匀,在电机高速转动下,梁 或者板将发生上下振动。试问如何减小振动。 (1)提高电机质量 (2)增加阻尼 (3)动力吸振器
14
两自由度系统的无阻尼自由振动
图示两自由度系统,无阻尼,无激励
k1
k2
k3
m1
m2
振动微分方程为:
m1x1 (k1 k2 )x1 k2 x2 0 m2 x2 (k2 k3 )x2 k2 x1 0
令:
二自由度系统振动

二自由度系统振动
两自由度
二自由度系统振动
四自由度
缺点:车轮、车身模型也相对简单(车身简化为一个 自由度,没考虑前后车轮二自的由度影系响统振)动 。
车辆悬架
二自由度系统振动
车辆悬架结构简图
七自由度
二自由度系统振动
2.1 两自由度系统的振动微分方程
建立振动微分方法: 牛顿运动定律 拉格朗日方程
2.1 两自由度系统的振动微分方程
写为矩阵形式:
m 0 1m 0 2 x x 1 2 c 1 c 2 c 2c 2 c 2 c 3 x x 1 2 k 1 k 2 k 2k 2 k 2 k 3 x x 1 2 F F 1 2 ( ( t t) )
例1:两自由度弹簧阻尼质量系统
二自由度系统振动
2.1 两自由度系统的振动微分方程
取 置
为m坐1、标m原2
静平衡位 点,水平
向右为两个坐标的正
向,根据牛顿第二定
律得到:
m1x1 k1x1 c1x1 k2 (x1 x2 ) c2 (x1 x2 ) F1(t) m2x2 k2 (x1 x2 ) c2 (x1 x2 ) k3x2 c3x2 F2 (t) 整理,得 m m 2 1 x x 2 1 c (c 2 1 x 1 c 2 (二) c x 2 自1 由 度c 系c 3 统2 )x x 振2 2 动 ( k k 2 1 x 1 k 2 () k x 2 1 k k 3 2 )x x 2 2 F F 1 2 ( (tt) )
U
1 2
k1 x12
1 2
k2 ( x1
x2 )2
1 2
k3 x22
1 2
x
1ห้องสมุดไป่ตู้
两自由度系统的振动

2 2) ad bc , 12 和 2 都是正数,两个正实根。 3)方程仅有两个正实根的事实说明,系统可能有的同步 运动不仅是简谐的,且只能以两种频率作简谐运动。
4)ω1和ω2由由系统参数确定,称为系统的自然频率。两
2 (t ) c3 x 2 (t ) c2 [ x 2 (t ) x 1 (t )] k3 x2 (t ) k 2 [ x2 (t ) x1 (t )] F2 (t ) m2 x
整理得到
1 (t ) c1 c2 x 1 (t ) c2 x 2 (t ) k1 k 2 x1 (t ) k 2 x2 (t ) F1 (t ) m1 x m2 x2 (t ) (c2 c3 ) x2 (t ) c2 x1 (t ) (k 2 k 3 ) x2 (t ) k 2 x1 (t ) F2 (t )
由两自由度系统到更多自由度系统,则主要是量的扩充,
在问题的表述、求解方法及最主要的振动特性上没有本质 的区别。
1
2
1
2
1 1 2
2 3
6.2 两自由度系统的自由振动
一、两自由度振动系统的运动微分方程
1( 1 1
)
1(
)
2 2
2(
)
2
( )
3 3
1
2
(a)
1 1 1( 1 1(
( )
1
( )
2[ 2 (
2
1
上式表明:系统按其任一自然频率作简谐同步运动时,m1 和m2运动的振幅之比由系统本身的物理性质决定,对于特 定系统,是一个确定的量。 由于m1和m2作同步运动,任意时刻的位移之比等于振幅比
两自由度系统的振动

m2
2
刚度矩阵
M
m1
0
0
m2
Kk1kk22
k2 k2 k3
q
x x
1 2
K
k11 k21
k12
k22
M加动 速力J01度耦J之合02 间或K的惯耦性合耦kkt1t称合1 为kt1 ktk1t2
q
1 2
MJmmaa2 mma
Kkk12l1l22kk21ll1 22
k2kl12kk21l1
以钢杆中点垂直位移和转角为广义坐 标,可以得到如下动力学方程
m x m ( m x e ) ( k 1 k 1 e ( k x 2 ) l x 3 ) ( k 2 k l 2 4 ( x k 1 l l 4 3 ) ) 0 0
m e J x c ( J k c 2 ( x m l 4 2 ) ) l 4 ( k k 2 1 l 4 ( x e k l 1 3 l 3 ) ) x l 3 ( m k ( 2 x l 4 2 e k ) 1 e l 3 2 ) 0 0
整理后得
m m eJ m c e 1 x k 2 k l1 4 k k 2 1 l3 k k 2 2 ll4 2 4 k k 1 1 l l3 3 2 x 0 0
两自由度系统的振动
➢ 静力耦合和动力耦合
一般情况下两自由度系统无阻尼自由振动微分方程组为
两自由度系统的振动 ➢ 双质量弹簧系统的自由振动 m 1x1(K1K2)x1K2x20 m2x2K2x1(K2K3)x20
➢双盘转子的扭振
JJ121 2kkt1 t1 11k(tk1t12k0t2)20
➢汽车车体的平面振动 广义坐标:车体随参考点O 的(上下)平动x和车体在平 面内绕O点的转动θ
第六节 两个自由度体系的自由振动全面.ppt
优选
8
要使体系按其某一主振型作简谐自由振动,只有在特定的初 始条件下才能出现。例如,对应于第一振型,应有
y2 (0) y1 (0)
A(1) 2
sin
即
y1 (t) y2 (t)
AA12ssiinn((tt))
二阶导数为
y1 (t) y2 (t)
AA1222ssiinn((tt))
将上面式子代入运动方程,消去公因子sin(ωt+ ),经整理后得
(11m1
1 2
) A1
12 m2 A2
0
12 m1 A1
(22m2
1 2 ) A2
0
优选
4
右式是以质点振幅A1和A2为未知量的齐次线性 代数方程组。其中零解对应于无振动的情况, 不是所要求的解答。为使方程组具有非零解, 则其系数行列式必须等于零,即
当ω=ω1时,此时A1用A1(1)表示,A2 用 A2(1)表示,则由式(11-46)的第一式得
1
A(1) 2
A(1) 1
2 11m1 12 m2
1
相应地,得到质点位移y1(t)、y2(t)的一个特解
y1 (t) y2 (t)
A1(1) A2(1)
sin(1t sin(1t
1
)
1 )
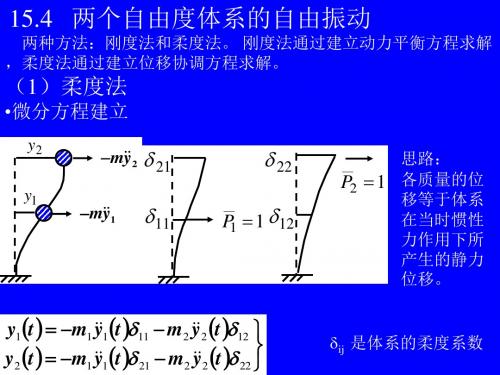
本节先讨论两个自由度体系,下节再推广到n个自由度体系。 与单自由度体系一样,两个自由度体系建立运动方程也有柔度 法和刚度法,分别讨论如下。
优选
1
一、柔度法 1.运动方程的建立
优选
2
两个自由度体系的自由振动

• 引言 • 两个自由度体系的模型建立 • 两个自由度体系的自由振动分析
• 两个自由度体系的振动控制 • 实验验证与结果分析 • 结论与展望
01
引言
背景介绍
ቤተ መጻሕፍቲ ባይዱ
自由振动是物理学中一个重要的概念,它描述了系统在没有外部作用力的情况下 ,通过自身内部能量进行的振动。两个自由度体系是指具有两个独立方向的振动 体系,例如弹簧振荡器、单摆等。
02
通过理论分析和数值模拟,我 们发现某些参数条件下,两个 自由度体系可以发生共振或反 共振现象。
03
系统的能量在振动过程中会在 两个自由度之间转移,表现出 能量的分散和集中现象。
研究不足与展望
1
当前的研究主要集中在理论分析和数值模拟上, 缺乏实验验证,因此需要进一步开展实验研究。
2
对于两个自由度体系自由振动的动力学行为,仍 有许多未知领域需要探索,例如更高维度的自由 度体系、不同阻尼机制等。
3
需要进一步研究两个自由度体系在受到外部激励 或约束条件下的振动行为,以及与其他动力学现 象的相互作用。
THANKS
感谢观看
分析振动响应的特性,如频率、振幅、相位等,以 了解系统的自由振动行为。
03
两个自由度体系的自由振动分析
振动特性分析
固有频率
描述体系对振动的敏感程度,与体系的质量和刚度有关。
阻尼比
描述体系能量耗散的快慢,与阻尼系数和固有频率有关。
模态振型
描述体系在不同方向的振动形态,是振动特性的重要参数。
振动频率计算
自由振动在工程、自然界和日常生活中广泛存在,如乐器振动、地震波传播、桥 梁振动等。
研究意义
自由振动研究有助于深入理解物理现象的本质,探究系统内部能量转换和 传递机制。
两自由度系统的振动

激振力矢量
例3:转动运动 两圆盘 外力矩 M1(t), M 2 (t) 转动惯量 J1, J2 轴的三个段的扭转刚度 k1, k 2 , k 3
1
2
k 1
k 2
k 3
M 1 (t )
M 2 (t)
J1
J2
试建立系统的运动微分方程
11
解:
1、建立坐标:设某一瞬时: 角位移 1, 2
1665年2月的一天,因为身体不适,他躺在家 里休养。闲来无事只得盯着墙壁发呆。然而却意 外地在他自己发明的摆钟上,发现了一个有趣的 现象。
有趣的现象:
墙壁上并排悬挂着的两只钟,这两只钟的钟摆 竟然在按照相同的位移(拍子)摆动!经过连续 几个小时的观察之后,结果还是一样。而且就算 强行将其中一只钟的钟摆拨成相反位移的运动, 不到30分钟,也还是恢复成相同的位移。只有将 一只钟挂到另一面墙上后,两只钟的位移才开始 渐渐分出不同,到最后甚至连一天的周期也产生 了5秒左右的差别。后来,他又通过实验推断, 这两只钟的同步运动可能是由两只钟之间的空气 振动或者是墙壁的轻微振动导致的。
k2
k2 k2 k3
x1 x2
FF12
t t
M
m1
0
0
m2
质量矩阵
K
k1 k2
k2
k2
k2
k3
刚度矩阵
X
t
x1 x2
位移矢量
F
t
F1 F2
第三章 两自由度系统振动
d d( tq L j) q L jQ j - q D j (j 1 ,2 , ,n )
式D 中 1 2 C 1 x 1 2 1 2 C 2 (x 1-x 2)2 1 2 C 3 x 2 2
例题: 置于光滑平面的小车质量m1,车上质量为m2的圆柱体可作 无滑动的纯滚动。试建立该系统的运动微分方程。
两自由度与单自由度系统振动特性与分析方法的不同:
①两自由度振动系统具有两阶固有频率; ②两自由度振动系统引入主振型的概念,与系统的固
有频率一样,是系统本身的物理特性与固有特性, 与其初始条件无关。 ③一般情况下系统的振动是两种主振动的叠加,是一 种复杂的非周期运动。当满足一定条件时,系统才 作主振动。
(j1,2, ,n)
或
dd(tqLj)qLj 0 (j1,2, ,n)
(1)
其中,L=T-U称为拉格朗日函数。
2)当作用在系统上的主动力中,部分为有势力,部分 是非有势力,广义力Qj可分为两部分:
Qj Qj Q (j1,2,,n) 其中 Q是对应于非有 义势 力力 Q, j是 的对 广应于有势 广义力。 拉氏方程可写成
1
第三节 两自由度系统振动模型的建立
动力学系统振动模型的建立方法: 牛顿运动定律 定轴转动微分方程 能量法
一、拉氏方程的原理
在理想、完整约束条件下的n个自由度系统,选取广义坐 标为qj(j=1,2, ···,n),其运动可由如下拉格朗日方程来描述:
dT T d( tq j)qj Q j
取静x,平衡位置作为坐标原点,
进行受力分析,建立系统的运 动微分方程:
m1x K1(x r) I0 K1(xr)r K2r2
两个自由度体系的自由振动.
k11
48EI 24EI , k 21 l3 l3
24EI 24EI k12 3 ,k 22 3 l l
(k11 2 m1 )Y1 k12Y2 0 2 k21Y1 (k 22 m2 )Y2 0
k11 2 m1 k12 D 0 2 k21 k22 m2
1 11 m2 2 12 y2 1P sin t m1 y y m1 y1 21 m2 y2 22 y2 2 P sin t
(2)动位移的解答及讨论
平稳阶段的纯强迫振动 设稳态受迫振动部分位移的解答为
y1 (t ) Y1 sin t y2 (t ) Y2 sin t
M (t )max M1I1 M 2 I 2 M P
在两个自由度体系中,同一点的位移和弯矩的动力系数是不同
15 .5. 2 刚度法
1 k11 y1 k12 y2 P m1 y 1 sin t m2 y2 k21 y1 k22 y2 P2 sin t
1
21m1
0
2
令 2
1
11m1 22m2 12m2 21m1 0
11m1 22 m2 2 4 11 22 12 21 m1m2
2 11m1 22 m2 11 22 12 21 m1m2 0
15.4.4 两个自由度体系自由振动方程的一般解
两个自由度体系能够按某个主振型自由振动的条件是:初始位 移和初始速度应当与此主振型相对应。
在一般情形下,两个自由度体系的自由振动可看作是两种频率
及其主振型的组合振动,即
(1) (2) y1 t A1Y1 sin 1t 1 A2Y1 sin 2 t 2 (1) (2) y2 t A1Y2 sin 1t 1 A2Y2 sin 2 t 0 2 k21Y1 (k22 m2 )Y2 0
两个自由度系统的振动ppt课件
x1
x2
第5章 两个自由度系统的振动
5.2 振动方程
5
[M] 称 为 系 统 的 质 量 矩 阵 , [K] 称 为 刚 度 矩 阵,[C]称为阻尼矩阵,{x}为系统的位移列阵, {F(t)}为外激励列阵。
对于其它形式的两自由度振动系统同样可得 到相应的质量矩阵、刚度矩阵和阻尼矩阵。
由于矩阵[M]、 [K]、 [C]的非对角线元素不 为0,所以振动微分方程是互相耦合的非独立 方程。
第5章 两个自由度系统的振动
能量法
29
3. 阻尼矩阵的形成 线性阻尼(黏滞阻尼)的耗能函数可写为
1
Ed
2
k
ckj x&k x& j
j
1{x&}T [C]{x&} 2
[C]即为所求的阻尼矩阵,也是对称阵。
第5章 两个自由度系统的振动
能量法
30
【例5-2-3】求[M]和[K]。 解:取静平衡位置为坐 标原点和零势能位置
第5章 两个自由度系统的振动
5.2 振动方程
8
根据刚度影响系数和质量影响系 数,可以写出下列关系:
k11x1 k12 x2 m1&x&1 c1x&1 c2 (x&1 x&2 ) F1(t) k21x1 k22 x2 m2&x&2 c3x&2 c2 (x&1 x&2 ) F2 (t)
)
{x} [R]({F} [M ]{&x&} [C]{x&})
这就是以柔度矩阵表示的位移形式的振动方程。
第5章 两个自由度系统的振动
5.3 位移方程
11
因为[R]为正定矩阵,于是位移方程又可写为
机械振动第四章
第四章两自由度系统的振动当振动系统需要两个独立坐标描述其运动时,称为两自由度振动系统。
两自由度系统是最简单的多自由度系统,因此研究两自由度系统是分析和掌握多自由度系统的基础。
两自由度系统具有两个固有频率,两自由度系统以固有频率进行的振动与单自由度系统不同,它以固有频率进行的振动是指整个系统在运动过程中莫一位移形状,称为固有振型,因此两自由度具有两个与固有频率对应的两个固有振型。
在任意初始条件下的自由振动响应一般由两个固有振型的叠加得到。
受迫简谐振动的频率与激励频率相同。
两自由度系统的振动微分方程一般由两个联立的微分方程组成。
如果恰当地选取坐标,可使两个微分方程解除耦合,这种坐标称为主坐标或固有坐标。
用固有坐标建立的系统振动微分方程为两个独立的单自由度系统的微分方程。
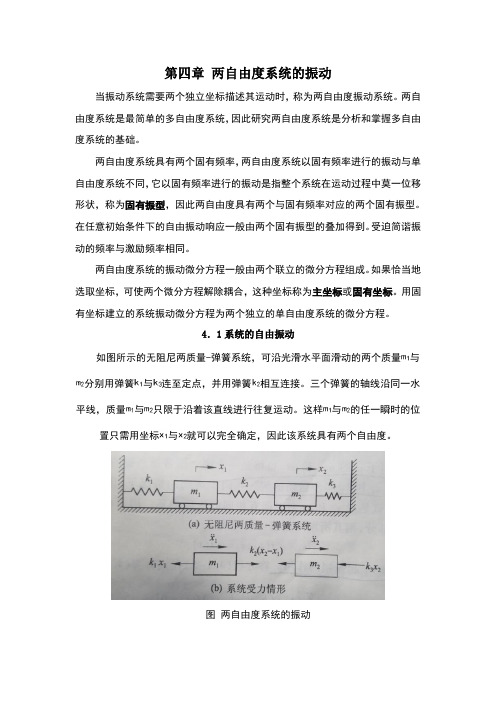
4.1系统的自由振动如图所示的无阻尼两质量-弹簧系统,可沿光滑水平面滑动的两个质量与分别用弹簧与连至定点,并用弹簧相互连接。
三个弹簧的轴线沿同一水平线,质量与只限于沿着该直线进行往复运动。
这样与的任一瞬时的位置只需用坐标与就可以完全确定,因此该系统具有两个自由度。
图两自由度系统的振动取与的静平衡位置为坐标原点。
在振动过程中任一瞬时t,与的位置分别为与,作用于与的重力于光滑水平面的法向反力相平衡,在质量的水平方向作用有弹性恢复力和,质量的水平方向则受到和作用,方向如图所示。
取加速度和力的正方向与坐标正方向一致,根据牛顿运动定律有移项得方程()就是图所示的两自由度系统自由振动的微分方程,为二阶常系数线性齐次常微分方程组。
方程()可以使用矩阵形式来表示,写成由系数矩阵组成的常数矩阵m和k分别称为质量矩阵和刚度矩阵,向量x 称为位移向量。
因此设分别为刚度矩阵k中的元素,因而方程()可以写成方程()为系统自由振动的微分方程。
方程()是齐次的,如果和位方程()的一个解,那么与其相差一个因子的和也将是一个解。
通常感兴趣的是一种特殊形式的解,也就是和同步运动的解。
第四章两自由度系统的振动介绍

第四章两自由度系统的振动介绍第四章是关于两自由度系统的振动的介绍。
在这一章中,我们将探讨两自由度系统的振动模型、动力学方程,并讨论其解析解和数值解。
此外,我们还将介绍两自由度系统的模态分析、共振现象以及一些相关的应用。
两自由度系统是一种具有两个自由度的振动系统,它由两个具有质量和弹性的物体通过柔性连接件或刚性连接件相互连接而成。
这些物体可以是质点、弹性体或刚体等,而连接件可以是弹性杆、弹簧、细梁等。
在两自由度系统中,每个物体都可以做平动或转动运动,因此系统具有两个自由度。
例如,双摆锤、双弹簧振子等都属于两自由度系统。
两自由度系统的动力学方程可以由拉格朗日方程或牛顿第二定律得到。
得到动力学方程后,我们可以通过解方程得到系统的解析解,以获得系统的振动特性。
在分析解时,通常要求系统的运动是简谐振动或近似简谐振动。
另一种求解两自由度系统的方法是数值解法。
数值解法可以通过数值积分来近似求解动力学方程,这种方法常用于求解复杂的系统,或者对系统参数进行优化等情况。
分析解和数值解法可以用来研究两自由度系统的固有振动频率、振型和动态响应等。
通过模态分析,我们可以得到系统的固有频率,并确定每个模态的振型。
对于实际工程问题,模态分析可以帮助我们了解系统的共振情况,并设计出合适的控制策略,以求减小共振现象的发生。
共振是两自由度系统中一个重要而常见的振动现象。
当外力的频率与系统的固有频率接近时,系统会发生共振现象。
共振的发生会导致系统振幅的急剧增加,并且可能对系统的稳定性产生不利影响。
因此,在设计过程中,需要避免共振现象的发生,并采取合适的措施来控制共振。
此外,两自由度系统的振动也有许多实际应用。
例如,双摆锤可以用来研究天体运动和天文学现象;双弹簧振子可以用来研究建筑物或桥梁的振动特性;双振子可以用来研究分子振动和分子动力学等。
总而言之,两自由度系统的振动是一种普遍且重要的物理现象。
通过对两自由度系统进行建模和分析,我们可以深入了解系统的振动特性,并在实际应用中进行优化和改进。
两自由度系统的振动

x1 (t ) = x1(1) + x1( 2) = A1(1) sin(ω1t + α1 ) + A1( 2) sin(ω2t + α 2 ) (1) ( 2) (1) ( 2) x2 (t ) = x2 + x2 = A2 sin(ω1t + α1 ) + A2 sin(ω2t + α 2 )
m1 &&1 + 2kx1 − kx 2 = 0 x 2m&&2 − kx1 + 2kx 2 = 0 x
Theory of Vibration with Applications
k3 x2
返回首页
两自由度系统的振动
例题
x m 0 &&1 பைடு நூலகம் 2k 0 2m && + − k x2
&& m1 x 1 + ( k 1 + k 2 )x 1 − k 2 x 2 = 0 && m2 x 2 − k 2 x 1 + k 2 x 2 = 0
m1 &&1 = − k 1 x 1 + k 2 ( x 2 − x 1 ) x m2 &&2 = − k 2 ( x 2 − x 1 ) x
m 0 质量矩阵 M = 0 2m
− k x1 0 x = 0 2k 2
2k K = − k − k 2k
刚度矩阵
(2)解频率方程,求ωi 将M和K代入频率方程,得
第5讲 两自由度系统的振动

(4)
,式中常数u1和u2起振幅的作用。 请
将方程(4)代入方程(3),得
m1u1 f(t)+ (k11u1 + k12u2 ) f (t ) = 0 m2u2 f (t)+ (k21u1 + k22u2 ) f (t ) = 0
2015/3/24 机械系统动力学-多自由度系统的振动
现在关心的问题是,在初值条件下,如何求解 这个方程。这里,有两个问题需要确定: 1、坐标x1和x2是否有相同的随时间的变化规律 2、x1和x2是否是简谐函数
2015/3/24
机械系统动力学-多自由度系统的振动
14
有趣的“同步化” 现象
最早观察到同步化现象的科学家是
课 件荷兰的物理学家克里斯蒂安 · 惠更斯 仅 供(Christian Huygens 1629-1695)。根据 学 习伽利略(Galileo Galilei 1564-1642)发现 复 习 的钟摆的等时性原理,他于1656年把单 之 用 ,摆引入了机械钟,研制成第一个摆钟。 请
勿标,它们能够完全描述了系统在任何时刻的运动:x1和 它 用x2不仅表示出质量m1和m2的运动,而且也描述了
弹簧
。 曹k 、k 和k 的运动。因此,该系统是一个两自由度系统。 1 2 3
2015/3/24 机械系统动力学-多自由度系统的振动 8
两自由度系统的自由振动(微分方程)
f1 f2
课 件 仅 供 x1 x2 学 k2 (x2 − x1 ) 习 k1 x1 m1 m2 k3 x2 复 习 f1 f2 之 用 设运动x1和x2是微幅的,振动系统是线性的。由牛 ,顿定律建立运动微分方程 :
引言
2015/3/24
机械系统动力学-多自由度系统的振动
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s
(Fx
x qi
qi
Fy
y qi
qi
Fy
z qi
qi
)ds
n
Qiqi
i1
其中
Qi
s (Fx
x qi
Fy
y qi
Fy
z qi
)ds
( i=1 , 2 , ……n )
——称为与广义坐标qi对应的广义外力(若外力是 集中力,不必积分,只须求Σ )
二、达朗伯尔原理
达朗伯尔提出了惯性力概念,使虚位移原理 的应用范围从静力学扩展到动力学。他指出:一 个具有理想约束的系统其主动力及惯性力在任何 虚位移上所做虚功之和为零。即:
Wu We U 0 (1)
式中:Wu ——惯性力在虚位移上所做的功。
我们看到,对于静力问题,Wu 0 ,(1)式 为虚位移原理。所以说虚位移原理是达朗伯尔原 理的特例(在静力学方面的应用)。
一、虚位移原理——如果一个具有理想约束的系 统在外力作用下处于平衡状态,则主动力在任意虚位 移上所做虚功之和为零。
虚位移——约束允许的任意微小位移。
虚功——力在虚位移上所做的功。
表达式:
We U 0
其中,We ——全部外力所作虚功;
U ——全部内力所作虚功,因内力永远 与位移相反,故前加负号。
保守力有重力、万有引力、弹性力等。但摩擦力 及我们这里经常讲的阻尼力都不是保守力。
保守系统——只有保守力做功的系统称为保守系 统。保守系统的特征是遵循机械能守恒定律(即 T+U=C)。
非保守系统当然也应遵守能量守恒定律(这是普 遍性定律),但其机械能不守恒,而是有一部分由于 摩擦或阻尼转换成了热能。
§4—2 拉格朗日方程 在处理一些简单的动力学问题时,可以用牛顿 第二定律来建立运动微分方程并求解(用动静法把 惯性力当作外力与其它力组成平衡力系的方法也属 此例),这叫做矢量力学或牛顿力学。其优点是简 单、直观。但是,对于一些较复杂的动力学问题, 用牛顿力学方法就很困难,甚至不可能,因此人们 从能量的观点去建立运动微分方程再求解之,这叫 做分析力学,我们这里研究的是动力学问题,故又 称分析动力学。在分析动力学中有一个很著名的、 经常用到的方程叫做拉格朗日方程,我们先讲它的 基本思想,然后介绍其推导过程。
y=y(q1,q2……qn)
z=z(q1,q2……qn)
若系统的虚位移δ q1,δ q2……δ qn,那么直
角坐标的虚位移表达式为:
x
x q1
q1
x q2
q2
x qn
qn
n i 1
x qi
qi
y
n i 1
y qi
qi
z
n i 1
第四章 两个自由度系统的振动
§4—1 引言 §4—2 拉格朗日方程 §4—3 两个自由度系统的自由振动 §4—4 两个自由度系统的受迫振动 §4—5 本章习题
§4—1 引言 第二章介绍了单自由度系统的振动。这是研究 机械振动的基础,也可以处理一些简单的振动问题。 但是,工程中大量出现的还是多自由度系统乃至无 限自由度系统的振动问题。而两个自由度系统的振 动则是多自由度系统中最简单的。 两个自由度系统,顾名思义,就是说:系统的 运动状态需要而且可以由两个独立坐标来描述的, 称之为两个自由度系统。 两个自由度系统虽然比单自由度系统只多一个 自由度,两者之间却有着质的区别。后者的系统固 有特性只有固有频率;而前者除了固有频率外还有 固有振型,这正是多自由度系统的共有特征。
d2 dt
x
2
,qi
d 2qi dt 2
〕
它们所做虚功总和是:
Wu
n
v(xx yy zz)dv
i1
v
(x x qi
y
y qi
z
z qi
)dvqi
为了把 Wu写成动能的表达式,要把 进行变换。
x x qi
……
注意到
x
x q1
q1
x q2
q2
x
qn
qn
n i 1
x qi
qi
于是
x x qi qi
于是
x x qi
d dt
(
x
x qi
)
x
d dt
(
x qi
)
d dt
(x
x qi
z qi
qi
下面分别计算各力的虚功,即(1)式中的各项。
1、外力虚功 W e
设 Fx(x,y,z,t) , Fy(x,y,z,t) , Fz(x,y,z,t) 是 作 用 在 系统表面单位面积上外力的三个坐标分量,则全 部外力虚功为:
We
n
s (Fxx Fyy Fzz)ds
) x x qi
d dt [qi
( x2 )] 2 qi
x 2 ()
2
同理:
y y qi
d dt
[
qi
( y 2 )] 2 qi
( y 2 ) 2
z y qi
d dt [qi
( z2 )] 2 qi
2、内力虚功 U
U
U q1
q1
U q2
q2
U
qn
qn
n i 1
U qi
qi
其中U——系统势能
3、惯性力虚功 Wu
设弹性体质量密度 (x, y, z),则作用在单位体 积上的惯性力的三个分量是:
x,y,z
〔注:x
拉格朗日方程就是在达朗伯尔原理基础上建 立起来的。
三、保守系统的拉格朗日方程
保 守 力 —— 如 果 一 个 力 所 作 的 功 只 与 运 动 物 体 (力作用点)的始末位置有关,而与运动物体所经过 的路径无关,这样的力称为保守力,又称为有势的力。
〔注:还有其他说法:在闭合路径上有势力作功为 零,其元功是某一函数的全微分,这些叫法都等价〕
我们现在来推导保守系统的拉格朗日方程。 对于有n个自由度的系统,其运动状态可以用n个
独 立 的 广 义 坐 标 q1 , q2……qn 来 完 全 描 述 。 q1 ,
q2……qn可以是角位移、线位移,甚至可以是面 积、体积等等,故称为广义坐标。它与直角坐标 有一定的关系:
x = x ( q1 , q2……qn )