四驱系统详细介绍
全时四驱的原理

全时四驱的原理
全时四驱是一种车辆驱动系统,它能够根据路况自动调节四个轮子的驱动力分配,以提供更好的车辆稳定性和牵引力。
全时四驱的原理基于三个主要组成部分:驱动力分配器、差速器和传动系统。
驱动力分配器是全时四驱系统的核心部件,它能够根据车辆的实时状况调节驱动力分配。
在正常行驶情况下,驱动力分配器将大部分的驱动力传输到前轮,以提供更好的操控性和燃油经济性。
然而,当车辆检测到前轮打滑或路面附着力不足时,驱动力分配器会自动将一部分驱动力传输到后轮,以增加牵引力和稳定性。
差速器是另一个关键部件,它能够将驱动力分配到不同的车轮上。
在全时四驱系统中,差速器分为中央差速器和前后差速器。
中央差速器位于前后轴之间,它使得前后轮能够以不同的转速运转,并确保驱动力合理地分配。
前后差速器则将驱动力分配到同一轴上的两个轮子上,以确保两个轮子能够以不同的转速运转,以适应曲线行驶等情况。
传动系统是全时四驱系统的动力传输装置,它将发动机的动力传递到四个轮子上。
在全时四驱系统中,传动系统通常采用液力偶合器、多片湿式离合器或电子控制多片湿式离合器等技术,以实现驱动力的快速和精确的分配。
这些传动系统能够根据车辆的需要,快速地响应并调整驱动力的分配,以最大程度地提高车辆的操控性和稳定性。
综上所述,全时四驱的原理是通过驱动力分配器、差速器和传动系统的配合,根据车辆的实时状况来动态地调节驱动力的分配,以提供更好的车辆稳定性和牵引力。
这种系统能够在不同的路况和驾驶环境下,提供更好的操控性和行驶性能。
四驱系列(一):四驱系统的分类

四驱系列(一):四驱系统的分类我们知道,车厂通常会将自己最骄傲的技术贴在汽车的屁股上,就像以前常见的“ABS”、“ESP”及现在比亚迪的“4.9s”一样。
而我们经常可以在宝马的屁股上看到“xDrive”、奔驰的屁股上看到“4MATIC”、奥迪的屁股上看到“Quattro”,这分别代表了BBA三家各自的四驱技术。
由此可见,四驱是一项非常有技术难度的,可以一定程度上代表车厂研发能力的技术。
一、四驱的定义及分类传统意义上的四驱系统,一般是指将发动机动力传递给四个车轮的传动装置,属于传动系统的一部分。
四驱系统最初安装在卡车和具有越野性能的特殊用途车辆上可用于牵引和运载重物,也能够在包括爬坡在内的任何地形上无障碍地驾驶。
在越野环境下工作时,四轮驱动车通常在低摩擦系数路面上以低速驱动,如灰土地、泥泞地、沙砾地、沙地、冰雪路以及上下坡,汽车能转过障碍物或困难路况倍描述为“机动性”。
除机动性外,四驱系统开发时还需考虑越野路况及正常工况时的操纵稳定性。
随着新能源技术的不断发展,能够实现四轮驱动的技术路径越来越多,四驱系统已逐步超越传动装置这个概念。
目前来说,可以认为能使四个车轮均产生驱动扭矩的系统都可以成为四驱系统。
而根据动力源形式、动力源数量、传动装置结构等因素,可以将四驱系统做如下分类:图 1 四驱系统分类二、机械四驱机械四驱通常匹配传统燃油车(也可匹配新能源车),可分为分时四驱、全时四驱、适时四驱三大类,每类系统具备各自特征和工作模式:1)分时四驱分时四驱系统通常应用在卡车/SUV车上,常见结构如图2所示,核心部件为分动器。
图2 分时四驱系统分时四驱系统通常具备若干不同操作挡位(高挡位、低挡位和空挡位)和模式(两轮和四轮),司机可选择2H、4H、4L和空挡位。
在铺装、干燥路面行驶时,通常使用2H模式。
在2H模式下,仅驱动一个车桥(两轮驱动)。
当需要额外驱动时,如在冰雪路况下行驶,或在相对平坦路面并无特别异常的越野路况下行驶,可选择4H模式。
家用车的四驱系统使用与注意事项

家用车的四驱系统使用与注意事项随着汽车行业的不断发展,四驱系统已经成为越来越多家用车型的标配或选装配置。
四驱系统可以提供更好的操控性能和安全性,特别是在恶劣的路况或复杂的地形下。
然而,对于大部分家用车主来说,对四驱系统的了解可能还不够深入。
本文将介绍家用车的四驱系统使用与注意事项,帮助车主更好地使用和维护四驱系统。
一、四驱系统的工作原理四驱系统是通过将动力传输到车辆的四个车轮上,以提供更好的牵引力和操控性能。
一般来说,家用车的四驱系统分为全时四驱和可变驱动模式两种。
1. 全时四驱:全时四驱系统会在车辆行驶时持续工作,将动力平均分配到四个车轮上。
这种系统适用于各种路况,无需人工干预,能够提供较好的操控性能和稳定性。
2. 可变驱动模式:可变驱动模式的四驱系统通常具有两种模式,即前驱模式和四驱模式。
前驱模式下,车辆只有前轮驱动,适用于普通的道路行驶,能够节省燃油。
当遇到路面湿滑或需要更好的牵引力时,可以切换至四驱模式,将动力传输到四个车轮上。
二、四驱系统的使用注意事项虽然四驱系统可以提供更好的操控性能和安全性,但车主在使用时也需要注意以下几点。
1. 合理使用四驱系统:四驱系统在一些特定的路况下发挥最大的作用,如泥泞、雪地或崎岖山路等。
在普通干燥的道路上使用四驱系统反而会增加燃油消耗,并对车辆的传动系统造成不必要的损耗。
因此,在晴天或普通道路行驶时,应尽量关闭四驱系统,只在需要时使用。
2. 定期检查四驱系统:四驱系统是车辆的重要组成部分,需要定期检查和保养。
车主应按照车辆使用手册上的要求,定期更换四驱系统的润滑油和过滤器。
同时,还要注意检查四驱系统的传动轴、万向节和轮胎等部件的磨损情况,及时更换或修复。
3. 谨慎使用四驱锁定功能:一些四驱系统具有锁定功能,可以将前后轮的动力分配比例固定在50:50,以提供更好的牵引力。
然而,长时间使用锁定功能会导致传动系统的过热和磨损。
因此,在使用锁定功能时,需要注意时间和路况,不宜长时间使用,避免对车辆造成损害。
汽车的四轮驱动系统的介绍
有多少种四轮驱动车辆就几乎有多少种四轮驱动系统。
似乎每一家制造商都有几种为车轮提供动力的方案。
不同制造商所用的语言有时可能会有点令人迷惑,因此在开始解释车轮驱动的工作原理之前,首先让我们来澄清一些术语:四轮驱动:通常,当汽车制造商说一辆车具有“四轮驱动”时,他们指的是“分时”系统。
就本文而言,这些系统只是针对低牵引力条件,例如越野或在雪地或冰面上行驶。
全轮驱动:这些系统有时被称作“全时四轮驱动”。
全轮驱动系统是为适合在各种类型的路面上(包括公路和越野)行驶而设计的,而且这些系统大多数都不能关闭。
分时和全时四轮驱动系统可以采用相同的标准来评估。
最佳的系统会在每个车轮上施加最恰当的扭矩,也就是说,保持轮胎不会出现打滑时的最大扭矩。
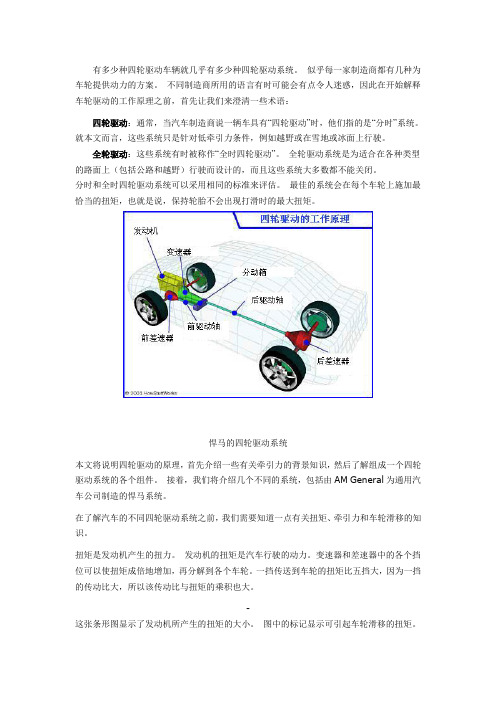
悍马的四轮驱动系统本文将说明四轮驱动的原理,首先介绍一些有关牵引力的背景知识,然后了解组成一个四轮驱动系统的各个组件。
接着,我们将介绍几个不同的系统,包括由AM General为通用汽车公司制造的悍马系统。
在了解汽车的不同四轮驱动系统之前,我们需要知道一点有关扭矩、牵引力和车轮滑移的知识。
扭矩是发动机产生的扭力。
发动机的扭矩是汽车行驶的动力。
变速器和差速器中的各个挡位可以使扭矩成倍地增加,再分解到各个车轮。
一挡传送到车轮的扭矩比五挡大,因为一挡的传动比大,所以该传动比与扭矩的乘积也大。
-这张条形图显示了发动机所产生的扭矩的大小。
图中的标记显示可引起车轮滑移的扭矩。
启动条件良好的汽车的扭矩从不会超过这个值,因此车轮不会打滑;但启动条件差的汽车会超过这一扭矩,因此轮胎会出现打滑。
只要一开始打滑,扭矩就会降到几乎为零。
有趣的是在低牵引力条件下可以产生的最大扭矩量由牵引力的大小而不是发动机决定。
即使您在车上安装了NASCAR发动机,如果轮胎不着地,再强的动力也无法利用。
在本文中,我们将牵引力定义为轮胎所能作用于地面的最大力(或者说,地面能够施加给轮胎的最大力,这两种说法都一样)。
以下是影响牵引力的因素:轮胎承重量:轮胎承重量越大,牵引力越大。
汽车四驱原理
汽车四驱原理
四驱原理是指汽车通过驱动力传递到四个车轮上,以提供更好的牵引力和操控性能。
四驱系统有多种类型,包括全时四驱、分时四驱和适时四驱。
全时四驱系统是指在车辆正常行驶时,所有四个车轮都同时受到驱动力的作用。
这种系统通常采用中央差速器将驱动力平均分配到前后两个驱动轴上,以确保各个车轮都能保持较好的牵引力。
这样可以提高车辆的稳定性和通过性能,适用于各种路况和驾驶条件。
分时四驱系统是指在正常行驶时,车辆仅通过两个轮子来驱动。
当需要更好的牵引力时,驾驶员可以手动或自动将车辆切换到四驱模式。
这时,系统会将部分驱动力传递到另外两个轮子上,以提供更好的牵引力。
这种系统适用于正常行驶时节约能源,而在需要时提供额外的牵引力。
适时四驱系统是指根据车辆行驶条件和需要自动调整驱动力的分配。
这种系统通过传感器监测车轮的滑动情况和路面条件,以确定每个车轮需要的驱动力。
然后,系统会根据这些信息调整驱动力的分配,以提供最佳的牵引力和操控性能。
适时四驱系统能够在不同的驾驶条件下自动适应,并在需要时提供额外的牵引力。
总的来说,四驱系统通过将驱动力传递到所有四个车轮上,提供更好的牵引力和操控性能。
不同的四驱系统类型能够根据车
辆行驶条件和需要,自动或手动地调整驱动力的分配,以满足驾驶员的需求。
汽车四驱系统
汽车四驱系统现代汽车行业的发展使得驾驶体验变得更加安全、舒适和有趣。
而在这个发展过程中,四驱系统起到了至关重要的作用。
四驱系统不仅可以增加车辆的牵引力和稳定性,还能够适应各种路况和天气条件,使驾驶者更加自信和放心。
本文将对汽车四驱系统进行介绍和分析。
一、四驱系统的定义和原理四驱系统是指汽车的所有驱动轮都能够获得动力的系统。
相比于传统的前驱或后驱系统,四驱系统能够将动力更均匀地分配到各个轮胎上,从而增加牵引力和操控性能。
在传统的四驱系统中,动力从发动机传输到传动轴,再由传动轴分配到各个车轮上。
而在现代的高级四驱系统中,通过电控系统、液压系统或电磁离合器等技术手段,车辆可以自动调整动力分配,以适应不同的路况和驾驶要求。
二、常见的四驱系统类型1. 全时四驱系统全时四驱系统是一种常见的四驱系统类型,它可以在车辆行驶的任何时候提供四驱功能。
这一系统通过通过车轮间的传动装置平衡动力分配,使得每个轮胎都能获得足够的牵引力。
全时四驱系统适用于各种路况,无论是干燥的公路还是湿滑的泥地,都能提供稳定的驾驶性能。
2. 可变四驱系统可变四驱系统是一种可以根据驾驶条件实时调整动力分配的系统。
当车辆在正常情况下行驶时,可变四驱系统会将大部分的动力分配到前轮或后轮上,以提供更好的燃油经济性和操控性能。
而当车辆遇到路面湿滑或者需要更多扭矩时,可变四驱系统会自动将动力分配到四个轮胎上,以增加牵引力和稳定性。
3. 适时四驱系统适时四驱系统是一种根据车辆需要和驾驶条件智能调配动力的系统。
它通过传感器和电控单元实时监测车辆的转向、车速、轮胎转速等信息,以确定最佳的动力分配模式。
适时四驱系统在正常行驶时可以将动力分配到前后轮胎上,以提供更好的驾驶体验。
而在路面情况变差或车辆需要更多牵引力时,适时四驱系统会自动将动力分配到四个轮胎上,以保证车辆的稳定性和安全性。
三、四驱系统的优势和应用场景1. 增加牵引力和操控性能四驱系统能够将动力分配到每个轮胎上,从而增加车辆的牵引力和操控性能。
适时四驱的工作原理

适时四驱的工作原理
四驱汽车是一种通过四个车轮驱动力来提供动力的汽车。
适时四驱系
统是四驱系统中的一种变体。
它可以根据需求,自动或手动地将驱动
力分配到一些或全部车轮上。
下面详细介绍适时四驱的工作原理。
1. 传动系统
适时四驱系统始于传动系统。
它需要一个特殊的传动系统,使动力能
够在车轮之间分配。
这种传动系统由多个驱动轴和齿轮连通组成。
2. 控制模块
适时四驱系统还需要一个控制模块,控制传动系统的驱动力分配。
这
个模块可以通过取得来自各种传感器(比如油门位置、转向、速度、
车辆倾斜等)的数据来智能调节转向力。
3. 锁定齿轮
适时四驱最独特的特点是可以手动锁定齿轮以改变动力分配。
当路况
越来越崎岖、陡峭时,驱动轮的牵引力会下降,特别是当车轮挂在空
中时,因为没有牵引力的平面接触地面。
如果单个车轮的牵引力很差,可以通过锁定四驱系统中的一个或多个齿轮,将所有车轮连接在一起,使四个车轮都发挥牵引力。
4. 车辆倾斜
适时四驱还可以通过探测车辆倾斜角度来改变四驱系统中的动力分配。
当车辆驶过一个路况较差或不平坦的区域时,车辆可能变得不稳定。
适时四驱系统可以通过探测车辆倾斜角度来自动调整动力分配,在需
要时为车辆提供额外的稳定性。
总体而言,适时四驱通过传动系统和控制模块协同工作,能有效地将
驱动力分配到适当的车轮上。
经过优化与设计,适时四驱能够为驾驶提供额外的稳定性和牵引力,让驾驶感到更加稳定和舒适。
丰田混动四驱工作原理
丰田混动四驱工作原理丰田混动(Hybrid)四驱系统是一种将电动驱动与传统内燃机驱动结合在一起,以实现更高效能和更低排放的驱动系统。
混动四驱系统在市场上已经有一段时间了,在丰田车型中得到了广泛应用,许多车型,如普锐斯和RAV4,都采用了这一技术。
混动四驱系统的工作原理是在车辆上同时使用电动驱动和内燃机驱动。
系统由一个电动机、一个电池组和一个燃油引擎组成。
当汽车需要动力时,电动机会从电池组中提取电能,以驱动车辆。
当电池组电量不足时,或者需要更多动力时,燃油引擎会自动启动并运行。
混动四驱系统通过控制电动机和燃油引擎的工作来实现四驱功能。
在正常行驶的情况下,系统会优先使用电动驱动,这可以提供更好的燃油经济性和低排放。
当需要更多的牵引力时,系统会启动燃油引擎,这样两个驱动系统可以合作工作,以提供额外的动力。
通过燃油引擎的辅助,车辆的四驱性能得到了提升。
混动四驱系统还可以通过电动机和燃油引擎的协同工作来提供更好的悬挂控制。
在特定情况下,电动机可以提供扭矩矢量控制,用于提供更好的车辆稳定性和悬挂性能。
这使得车辆在驾驶过程中更加稳定和易于操控,尤其在弯道行驶或复杂的路况下。
此外,混动四驱系统还具有能够利用回收能量充电电池的功能。
在汽车刹车或减速时,电动机可以将动能转化为电能,并储存在电池组中。
这些回收的能量可以用于之后的电动驱动,从而节省燃料并减少对环境的影响。
总之,丰田混动四驱系统通过将电动驱动和传统内燃机驱动结合在一起,以提供更高效能和更低排放的驱动系统。
这一系统具有切换驱动模式、协同工作和回收能量的功能,从而实现更好的动力性能和驾驶操控性。
这一技术的应用使得丰田的汽车在市场上得以卓越的地位,并且成为了未来可持续交通的一部分。
适时四驱的工作原理

适时四驱的工作原理
适时四驱系统是一种能够根据车辆行驶状况自动调节驱动力分配的技术,它可以在保证车辆行驶稳定性的同时,提供更好的牵引力和操控性能。
那么,适时四驱系统是如何实现这一功能的呢?
首先,适时四驱系统通过车辆传感器实时监测车辆的行驶状态,包括车速、转向角度、轮胎抓地力等信息。
这些数据会被传输到车辆控制单元(ECU)中进行处理。
其次,ECU会根据传感器获取的数据,通过复杂的算法计算出每个车轮所需的驱动力,并通过电控液压系统调节传动系统的工作状态。
在普通路面行驶时,系统会将驱动力主要分配给前轮,以提高燃油经济性和操控性能;而在遇到低附着路面或者急剧加速时,系统会自动调节驱动力分配,将更多的驱动力传递到后轮,以提供更好的牵引力。
此外,适时四驱系统还可以根据车辆转向角度和横向加速度来实现动态转向功能。
当车辆转向时,系统会根据转向角度和车速调节每个车轮的驱动力分配,以提供更好的操控性能和稳定性。
总的来说,适时四驱系统通过实时监测车辆行驶状态,并根据车辆需要自动调节驱动力分配,以提供更好的牵引力和操控性能。
这种智能化的驱动力分配技术,不仅提高了车辆的适应能力,还提升了车辆的行驶稳定性和安全性,是现代汽车动力系统中的重要技术之一。
分时适时全时 四种特殊四驱系统详解
分时?适时?全时? 四种特殊四驱系统详解其实判断四驱类型,从前后桥动力分配的结构上就能一目了然:1、典型的分时四驱,比如说吉普牧马人,动力从变速箱出来后,硬连接后桥,平常就是个后驱,需要四驱的时候,前桥靠齿轮或链条直接和后桥挂成一个整体,前后桥转速相同。
它的分动箱,就像个开关,前桥只有硬连上和分开两种状态,操作的时候必须停车。
分时四驱的名称就是这么来的:要么分开,要么连上。
这种四驱,平常公路行驶时可以后驱行驶节省燃油,越野时挂上前桥,前后桥转速相同越野能力强大无比,而且这种结构连接强度大,越野时长时间高强度使用也没问题。
缺点呢,就是没中央差速器,四驱时前后桥硬邦邦连在一起,拐不过弯,公路上四驱根本没法用。
2、适时四驱,比如说奇骏、途观、RAV-4、CR V,动力从变速箱出来后,硬连接前桥,后桥的动力是从前桥上取的。
不过和分时四驱有个区别,后桥从前桥取动力的时候,要通过一个装置,这个装置种类比较多,有的是电控多片离合器,有的是粘性联轴节等等。
奇骏的这个电控多片离合器可人工和自动控制,彻底分开就是前驱、彻底结合就是LOC K模式。
这两种模式和分时四驱的2驱和4驱模式相同,但是通过多片离合器的半结合状态,可以给后桥适当分配一些动力,而且是可以动态调整的。
适时四驱的名称也是这么来的:车辆行驶的时候可以根据情况动态调整四驱。
可这种四驱,结构非常简单,能实现的四驱功能全面。
而且后桥就是个单独的附加装置,所以这种车型简单地去掉后桥驱动装置就变成两驱型号,适应更多的客户需求。
缺点就是能实现的四驱功能虽然全面,但样样都不精,锁定的时候没有分时四驱强度大,越野时根本不抵用。
公路时电控多片离合器和粘性联轴节调节后桥转速反应太慢。
只适合偶尔的低强度使用,用在城市SUV上倒是比较合适。
上面说的这两种四驱,有5个重要注意点:1、前后桥在动力分配上不是平等的,某个桥(分时四驱大部分是前桥,适时四驱大部分是前桥)是从变速箱直接取来动力,我们称之为驱动桥。
四轮驱动系统分类
很多人都以为四轮驱动的汽车可在任何地面上跑,想去哪里就去哪里。
实际上这是夸大了四驱车的能耐,就算是我的HUMMER,也不敢单独在野外行驶。
开过四驱越野车的朋友可能都知道,在恶劣的路面上,汽车差速器使得每一轴只有一个轮可以得到驱动,而且是在不停地打滑。
所以四驱车并非万能车,你必须知道四驱系统是怎么一回事。
一、四驱系统分类四轮驱动顾名思义就是汽车四个车轮都能得到驱动力。
这样一来,发动机的动力被分配给四个车轮,遇到路况不好才不易出现车轮打滑,汽车的通过能力得到相当大地改善。
四驱系统主要分成两大类:半时四驱(Part Time 4WD)和全时四驱(Full Time 4WD)。
现时,我们使用的四驱车大多是半时四驱。
只要车上有专门的两驱、四驱切换拨杆或按钮,那么,这辆就是使用半时四驱的四驱车。
半时四驱是四驱车最常使用的四驱系统,基本型号(一辆四驱车可能有4-6种型号,如Pajero的五种型号的引擎、变速箱和车内饰完全不一样,车价可相差近一倍)的三菱帕杰罗、L300、L400、基本型号的陆地巡洋舰PRADO、LC100、LC70、LC75、美国JEEP、五十铃TROOPER、RODEO、铃木VITARA、JIMNY等都使用半时四驱。
半时四驱的使用可分两种状态:一种是两驱,汽车只有两个车轮得到动力,与普通汽车没有区别;另一种则是四驱,此时汽车前后轴以50:50的比例平均分配动力。
半时四驱历史悠久,其优点是结构简单、可靠性大,加装自由轮毂(Free Wheel Hub)后更加省油。
全时四驱是使汽车四个车轮一直保持有驱动力的四驱系统。
若要细分全时四驱系统,可分成固定扭矩分配(前后50:50比例分配)和变扭矩分配(前后动力分配比例可变)两大类。
全时四驱也有很长的历史,可靠性更大,但其耗油量较大。
二、两种四驱系统比较半时四驱靠操作分动器实现两驱与四驱的切换。
由于分动器内没有中央差速器,所以半时四轮驱动的汽车不能在硬地面(铺装路面)上使用四驱,特别是在弯道上不能顺利转弯。
几种四驱车工作原理

几种四驱车工作原理
1. 四驱车的机械连接式四驱系统:这种系统通过一个传输箱将动力从发动机传递到前后两个传动轴上。
传输箱中有一个差速器,可将动力平均地分配给前后两个轴,并向每个轴上的驱动轮提供相同的扭矩。
这种系统的工作原理类似于普通的后驱车辆,只是额外为前轴提供了驱动力。
2. 四驱车的全时四驱系统:全时四驱系统通过一个中央差速器和一套附加的传动装置来分配驱动力。
中央差速器能够根据不同驾驶条件自动调整前后轴上的扭矩分配比例,以确保最佳的牵引力。
这种系统通常以自动模式工作,但也可以选择手动模式来锁定前后轴的扭矩分配。
3. 四驱车的电子控制式四驱系统:这种系统使用电子控制单元(ECU)来监测车辆的驾驶动态和路况,并根据需要调整前后轴上的扭矩分配。
ECU可以根据车轮的转速和滑移情况,实时调整扭矩分配,以提供最佳的牵引力和稳定性。
这种系统通常与车辆的稳定控制系统集成在一起,以提供更高的驾驶安全性。
4. 四驱车的气压控制式四驱系统:这种系统使用气压控制装置来控制四个车轮上的扭矩分配。
气压控制装置可以根据驾驶员的需求和路况,调整每个车轮上的扭矩分配比例,以提供最佳的牵引力和操控性能。
这种系统通常适用于越野车辆,在复杂的路况下提供更好的悬挂和驾驶性能。
请注意,这只是几种常见的四驱车工作原理,实际上还有其他不同的四驱系统,每种系统的工作原理和操作方式都有所不同。
四驱车的基本知识

四驱车的基本知识目录一、四驱车概述 (2)1.1 四驱车的定义 (3)1.2 四驱车与传统两驱车的比较 (4)1.3 四驱车的分类 (4)二、四驱系统的基本原理 (5)2.1 全时四驱系统 (7)2.2 分时四驱系统 (8)2.3 混合四驱系统 (9)2.4 四驱系统的工作原理 (10)三、四驱车的驱动方式 (11)3.1 全时四驱 (13)3.2 分时四驱 (14)3.3 混合四驱 (15)3.4 驱动方式的优缺点 (16)四、四驱车的越野性能 (18)4.1 四驱车的越野原理 (19)4.2 四驱车的越野能力 (21)4.3 影响四驱车越野性能的因素 (22)4.4 提高四驱车越野性能的方法 (23)五、四驱车的维护与保养 (24)5.1 四驱车的日常保养 (25)5.2 四驱车的定期保养 (26)5.3 四驱车的常见故障及解决方法 (28)六、四驱车的驾驶技巧 (28)6.1 四驱车的起步与停车 (30)6.2 四驱车的加速与减速 (30)6.3 四驱车的转向技巧 (31)6.4 四驱车的刹车技巧 (32)七、四驱车在日常生活和工作中的应用 (33)7.1 四驱车在家庭用车中的应用 (34)7.2 四驱车在商务用车中的应用 (35)7.3 四驱车在户外活动中的应用 (36)八、四驱车的发展趋势与新技术 (37)8.1 四驱车的发展趋势 (39)8.2 新技术在四驱车中的应用 (40)8.3 四驱车的未来展望 (41)一、四驱车概述全称为四轮驱动车辆,是一种具有高性能越野能力的车辆类型。
与传统的两轮驱动车辆相比,四驱车最大的特点在于其四轮均具备驱动能力,能够在复杂多变的路况下提供更好的牵引力和稳定性。
四驱车广泛适用于越野驾驶、赛车竞技、户外探险以及特殊环境的工作场景。
四驱车的出现,主要源于对更高越野性能和更稳定行驶状态的需求。
在复杂或恶劣的路况下,如泥泞、砂石、雪地、陡坡等,四驱车的四轮驱动系统能够提供更强大的动力输出和更好的抓地力,从而确保车辆的安全和稳定。
awd流程
awd流程AWD是指All-wheel drive(全时四驱),是一种汽车驱动形式。
相较于传统的两驱(前驱或后驱)汽车,AWD汽车能够更好地应对各种路况,并提供更好的稳定性和操控性能。
下面将详细介绍AWD的原理、优势以及一些常见的AWD系统。
1. AWD的原理AWD是通过车辆的传动系统来驱动四个车轮,以实现更好的牵引力和操控性。
传统的两驱汽车通常只有两个车轮受力,而AWD汽车可以通过不同的方式使四个车轮都受到驱动力的作用。
1.1 分配驱动力AWD系统通常采用不同的方式来分配驱动力。
最常见的方式是将驱动力按比例分配给四个车轮,以提供最佳的牵引和操控。
此外,还有一些AWD系统可以主动根据驾驶条件动态调整驱动力的分配。
1.2 检测驾驶条件AWD系统通常会通过传感器检测车辆的行驶条件,例如车轮的滑动情况、转向角度以及车辆的加速度等。
根据这些信息,系统可以实时调整驱动力的分配,以确保车辆始终保持最佳的牵引和稳定性。
2. AWD的优势AWD系统相较于传统的两驱系统,在特定的驾驶条件下具有明显的优势。
下面列举了一些AWD的优势:2.1 更好的牵引力由于四个车轮都受到驱动力的作用,AWD汽车在湿滑、冰雪等路面条件下具有更好的牵引力。
这意味着车辆可以更好地通过陡坡、泥泞路面或者崎岖的山路等复杂地形。
2.2 更好的操控性AWD汽车的四个车轮受到驱动力的支配,可以提供更好的操控性能。
在转弯时,AWD汽车可以更好地抓地,并且具有更好的平衡性,让驾驶者更容易控制车辆。
2.3 提高行驶稳定性AWD系统的特性可以增加车辆的稳定性。
在突发情况下,例如遇到紧急制动或者避让障碍物,AWD系统可以更好地分配驱动力,提供更好的稳定性,减少车辆跑偏的风险。
3. 常见的AWD系统AWD系统有很多种不同的设计和工作原理。
下面列举了几种常见的AWD系统:3.1 全时全驱系统(Full-time AWD)全时全驱系统是指始终将驱动力分配给四个车轮,并且无法关闭。
4wd名词解释
4wd名词解释摘要:一、4wd的含义与起源二、4wd的分类与特点三、4wd在不同领域的应用四、我国4wd市场现状与前景五、如何选择合适的4wd产品六、4wd的保养与维护七、结语正文:一、4wd的含义与起源4wd,全称四轮驱动,是一种汽车的驱动方式。
它起源于19世纪末,起初主要用于越野车型,以提高车辆在复杂路况下的行驶性能。
随着技术的发展,4wd系统逐渐普及到轿车、SUV等多种车型,成为现代汽车工业的重要组成部分。
二、4wd的分类与特点4wd系统主要分为两种:全时四驱(FWD)和分时四驱(4x4)。
全时四驱指车辆在任何时候都保持四轮驱动,具有良好的抓地力和操控性能;分时四驱则根据路况和驾驶需求,可在两轮驱动和四轮驱动之间切换,兼顾燃油经济性和越野性能。
三、4wd在不同领域的应用4wd系统在汽车领域有着广泛的应用,尤其在越野、SUV、轿车等车型中。
此外,4wd技术还被应用于工程机械、农业机械等领域,提高设备在恶劣环境下的工作性能。
四、我国4wd市场现状与前景近年来,我国汽车市场对4wd车型的需求不断上升,尤其是在SUV领域。
众多汽车品牌纷纷推出搭载4wd系统的车型,以满足消费者对驾驶性能和越野性的需求。
随着我国汽车市场的持续发展,4wd技术在未来仍有很大的发展空间。
五、如何选择合适的4wd产品在选择4wd产品时,消费者需关注以下几点:1.了解自己的驾驶需求,判断是否需要4wd系统;2.考虑车型和预算,全时四驱和分时四驱各有优缺点,需根据实际需求权衡;3.了解不同品牌和车型的4wd系统性能,参考权威评测和用户评价;4.注意售后服务和保养成本,确保车辆的正常使用。
六、4wd的保养与维护为确保4wd系统的正常运行,车主需定期检查以下部件:1.传动轴、万向节等传动部件,确保连接紧固;2.差速器,检查油量及油质,定期更换;3.轮胎,保持合适的胎压,定期更换磨损严重的轮胎;4.刹车系统,检查刹车片、刹车盘的磨损情况;5.保持车辆清洁,避免泥沙等杂物进入传动系统。
四驱系统浅析
发动机
电 子 辅 助
前传动轴
变速箱 分 动 箱 差速器
电控多片离合器 后传动轴
电控 单元
四驱 控制 模块
电 子 辅 助
差速器
电 子 辅 助
四、四驱系统比较-全时四驱
全时四驱就是任何时间,四个轮子都能获得驱动力,具
有很好的越野性与操控性,因为搭载这种四驱形式的SUV
往往都是大型SUV,全时全轮驱动车辆会比两驱车型拥有
特点:带有分动箱的汽车, 都是动力先由传动轴传递到 分动箱,在由分动箱来分别 传递到前轴和后轴,并且可
以在后驱和四驱之间切换,
多使用在硬派越野车上。
分动箱<二>
分时四驱分动箱--硬链接机构
分时四驱汽车就是平时可以为两驱车,越野路况转为四驱的汽车。 分时四驱分动箱是一种纯机械的装置。这种结构的分动箱在挂上4驱 模式的时候,前后轴是钢性连接,可以实现前后动力50:50的分配, 对于提高车辆的通过性非常有利。另外由于它的纯机械结构,可靠 性很高,这对于经常在缺少救援的荒野行驶的车型是至关重要的。 即使到现在,仍然有大量的硬派越野车采用这种分动箱。
差速器按其工作特性分为齿轮式
差速器和防滑差速器
按照安装位置可分为轮间差速器 与轴间差速器(中央差速器)
托森差速器
托森差速器是一个全自动纯机械差速器,即不需要人为控制+100%可靠 +传动直接的限滑差速器,从某个角度来说是一种很均衡的设计。
它可以根据行驶状态使动力输出在前后桥间以25:75~75:25连续变 化,而且反应十分迅速,几乎不存在滞后,而且有电子稳定程序的支 持,更进一步提高了动力分配的主动性。
四驱系统4WD

ZSUN4
3709
4WD
1.1 四驱系统的优点
• 通过性强 • 加速性好 • 操控性好
4WD
四驱系统的优势不仅仅体现在通过性上,其加速性也优于两驱车 辆,因为四个轮子都是驱动轮,可以充分利用轮胎与地面的附着力。 有些赛车为了取得更好的比赛成绩,就采用了四驱系统。同时由于四 轮驱动的良好循迹性,车辆的操控性和高速过弯能力非常好,所以有 些轿车的性能版和越来越多的超级跑车、高级轿车,也在使用四驱系 统,如三菱EVO、斯巴鲁翼豹、法拉利FF、布加迪、奥迪A8、奔驰S 级等等。
前传动轴 发动机 变速器 分动器 后传动轴 前轮 后轮
ZSUN4
3709
4WD
4WD
ZSUN4
3709
4WD
3. 适时四驱
4WD
适时四驱简单说就是只有在特定情况下车辆才是四轮驱动,而正常情况下则 是靠前轮或者后轮驱动。实现方式是在原本前驱或者后驱的传动系统中,通过取 力器(PTU)/智能分动器(TOD)向后桥/前桥传递一部分动力,传递扭矩的大 小由扭矩管理器(ITM)/智能分动器(TOD)来控制。ITM/TOD中的传力部件一 般为多片离合器,通过电磁或者液压来控制离合器片的压紧程度,进而调节传递 扭矩的大小。扭矩管理器也有极其简单的,如本田CR-V的粘性耦合器。 基于前驱传动系统的适时四驱动力传动路线图:
4WD
粘性耦合器
本田CRV 本田 Haldex: VW、Cadillac SRX、 、 、 Volvo、SAAB 、 宝马 xDrive GKN
扭矩管理器结构 液压式 多片离合器
转鼓式 凸轮压盘式 电磁式
GKN、 、 Borgwarner: 日韩系SUV 、保时捷等 日韩系 JTEKT:日韩系 :日韩系SUV与 与 四驱轿车
汽车四驱系统原理全解读

汽车四驱系统原理全解读四驱基础现在的四驱系统主要分成分时四驱、适时四驱、全时四驱三大类。
我们先从最早的四驱系统说起——分时四驱。
分时四驱什么是分时四驱?就是你想4驱就4驱,想2驱就2驱。
通过启闭差速器来实现驱动模式切换,这是最简单、也是最早的四驱系统。
分时四驱优点是结构简单,稳定性高,坚固耐用;但缺点是必须车主手动操作,有时还需要停车操作,这样不仅操作起来比较麻烦,而且当陷入恶劣路况时不能迅速反应,可能错过脱困的最佳时机,所以当要进入恶劣路况时,要提前切入四驱模式。
需要注意的是,分时四驱没有中央差速器,在摩擦力较好的铺装路面上使用四驱系统,会因为前后轴的转速差导致转弯不畅,所以在铺装路面上一定要切回到两驱模式。
代表车型:铃木吉姆尼、JEEP牧马人等适时四驱适时四驱只在合适的时候才会切换到四驱模式,什么时候合适一般由电脑控说了算。
这种驱动模式下,动力通常传递至一个驱动轴,当车轮打滑时,中央差速器锁止,此时会有一部分动力分配给另一个驱动轴。
但适时四驱缺点是要在打滑之后才会介入,所以它的响应速度较慢。
而且,由于最多只有50%的动力传递给第二驱动轴,这使它在主动安全控制方面,没有全时四驱的调整范围那么大,所以这种四驱系统跑跑乡下泥路还行,一旦遇到难度大一些的越野路段就无能为力了。
不过相比于全时四驱,适时四驱的结构简单而且省油,也有利于降低成本;相对于分时四驱,适时四驱则操作简单,作为只需要轻越野的城市SUV的四驱系统还是很合适的。
代表车型:CR-V、RAV4等。
全时四驱全时四驱是指汽车在行驶过程中,发动机输出扭矩以一定的比例分配到前后轮,四个轮子都能获得驱动力,具有很好的越野性与操控性。
全时四驱没有两驱和四驱之间切换的响应时间,所以相对而言会有更优异的通过性和安全性。
理论上,全时四驱是将发动机的动力输出分配到四个车轮上,所以能获得更为平稳的牵引力,因此车辆的可控性、通过性以及稳定性均会得到提升。
车辆在复杂路面行驶时,驾驶员能够更好的控制每一个行迹动作。
博格华纳四驱工作原理

博格华纳四驱工作原理详解博格华纳四驱系统是一种用于汽车的四轮驱动系统,它能够提供更好的牵引力和操控性能,使车辆在各种路况下都能够稳定行驶。
本文将详细解释博格华纳四驱系统的工作原理,包括其基本原理、组成部分以及工作过程。
一、博格华纳四驱系统的基本原理博格华纳四驱系统采用了一种称为“可变扭矩分配”的技术,通过不同的传动方式将动力分配给前轮和后轮,从而实现四轮驱动。
它能够根据车辆的行驶状态和路面情况,自动调整前后轮的动力输出,以达到最佳的牵引力和操控性能。
博格华纳四驱系统的基本原理可以总结为以下几点:1.动力传输:博格华纳四驱系统通过传输装置将发动机的动力传输给前轮和后轮。
传输装置通常由传动轴、差速器和驱动轴组成。
传动轴将动力从发动机传输到差速器,差速器再将动力分配给前后轮。
驱动轴负责将动力传输到车轮上。
2.动力分配:博格华纳四驱系统的关键是如何将动力分配给前轮和后轮。
它采用了一种称为“可变扭矩分配”的技术,通过控制中央差速器和前后差速器之间的扭矩分配,将动力分配给不同的车轮。
根据车辆的行驶状态和路面情况,系统可以实现前后轮的动力分配。
3.车辆操控:博格华纳四驱系统不仅可以提供更好的牵引力,还可以提高车辆的操控性能。
通过调整前后轮的动力输出,系统可以实现车辆的主动转向和稳定行驶。
在转弯时,系统会自动调整前后轮的动力输出,使车辆更容易转向。
在高速行驶时,系统会将更多的动力分配给后轮,以提高车辆的稳定性。
二、博格华纳四驱系统的组成部分博格华纳四驱系统由以下几个主要组成部分组成:1.发动机:发动机是博格华纳四驱系统的动力来源,它通过传输装置将动力传输给前轮和后轮。
2.传输装置:传输装置负责将发动机的动力传输到前轮和后轮。
它通常由传动轴、差速器和驱动轴组成。
传动轴将动力从发动机传输到差速器,差速器再将动力分配给前后轮。
驱动轴负责将动力传输到车轮上。
3.中央差速器:中央差速器位于前后轮之间,负责控制前后轮的动力分配。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
奥迪Quattro ——结构
扭 矩奥 分迪 配 方 方 式属 。于 全 时 四 轮 驱 动 系 统 的 变 动
Quattro
差速器-轮间
Torsen差速器-轴间
Torsen差速器
Torsen差速器
Torsen差速器 —— 结构 差速器壳体
后驱动轴
前驱动轴
蜗杆/前轴
蜗轮/前轴 正齿轮/前轴 空心轴 前 驱 动 轴
① 固定扭矩分配方式利用 轴间差速器把扭矩分配到前 后车轮,扭矩分配比取决于 轴间差速器的结构,多数为 50:50。常配置于一般的 越野吉普车上。
3.适时四轮驱动系统 ——Real-Time 4WD
适时四轮驱动,是指只有在需要的时候才 会选择四轮驱动模式,而在其他情况下仍 然是两轮驱动的驱动系统。适时四轮驱动 是一些多功能城市SUV、CRVo
奥迪Quattro ——含义
1980年奥迪公司研发了quattro四轮驱动系 统,并把它装备在一辆基于奥迪80底盘的 双门轿车上,这辆轿车的名字也叫quattro。 另外奥迪旗下还有一家名叫quattro的子公 司,专门实验和研发高性能车型。 因此,quattro既代表着奥迪四驱技术,又 代表一种车型,还是一家公司的名字。
电控四轮驱动系统分类
及奥迪Quattro
四轮驱动技术(4WD) ——什么是4WD
4 Wheel Drive,四个车轮都能得到驱 动动力,发动机的动力分配给四个车轮, 在复杂的道路条件下,汽车的通过能力得 到极大提高,在无路或越野条件下行驶时, 能发挥出极强的越野能力。 四轮驱动汽车通常标有4X4、4WD或 AWD字样,表示其具有四轮驱动功能。
Torsen差速器 ——原理
蜗杆
蜗轮、蜗杆传动
传动逆效率低
内摩擦力矩高
锁紧系数K值为0.56 转矩比Kb值为3.5
蜗轮
螺旋线升角越小K越大
Torsen差速器 ——原理
100% 75% 25%
在前、后轴地面附着力差异较大时,托森差速器的Kb 值最大可达到3.5,即处于地面附着力大的车轴获得的扭 矩比地面附着力小的车轴所获得的扭矩大3.5倍。这有利 于车辆驱动行驶。
全时四轮驱动系统 ——组成
全时全时四轮驱动系 统采用3个差速器,除了 前后桥各有一个差速器 外,在前后驱动桥之间 还有一个差速器,称为 轴间差速器。轴间差速 器是全时四轮驱动的重 要标志。 轴间差速器一般还带 有差速锁止功能,也称 差动限制。
全时四轮驱动系统 ——差速器的特点
差速器具有平均分配力矩特点
THANKS
蜗杆/后轴
正齿轮/后轴
正齿轮
蜗轮/后轴 蜗杆/前轴
蜗杆/前轴 蜗 轮 蜗轮轴
后驱动轴
Torsen差速器 ——原理
差速器的锁紧系数:K= Mr /MA 转矩比:Kb= M2/M1=(1+K)/(1-K)
显然,对于普通差速器K ≈ 0,M1≈M2 然而,Torsen差速器: 锁紧系数K值为0.56 转矩比Kb值为3.5
Torsen差速器 ——原理
锁紧系数K值为0.56 转矩比Kb值为3.5
假如差速器壳体静止不动 前驱动轴转速大于后驱动轴
从而实现了全时可 变扭矩分配方式的 四轮驱动方式
Torsen差速器 ——特点
Torsen差速器同时实现了差速,动态扭矩分配及自动锁止。
优点在于纯机械方式,能保证提供瞬间的响应和 产生渐进的锁止力(曲线更平滑),实现连续扭矩 输出管理,没有时间上的延迟 ;另外,差速机构 和锁止设备合二为一,使得结构更加紧凑,同时 与传统的摩擦盘式自锁差速器相比,磨损更小, 使Torsen 具有优异的可靠性。 但缺点是价格昂贵;在高负荷状态下易发热;另 外,生产组装的难度也较大。
分时四轮驱动系统 ——组成
主要用于越野或在 光滑的路面上行驶的 情况,所以是越野车 采用的驱动布置方案, 通常由变速器、分动 器、前传动轴、前桥 差速器和后传动轴、 后桥差速器等组成, 一般不设有轴间差速 器。
分时四轮驱动系统 ——特点
分时四轮驱动的特点是人工操作,由驾 驶员根据路面情况通过接通或断开分动器 来选择两轮驱动或四轮驱动模式,优点就 是可以根据实际情况来选取驱动模式,比 较经济。
全时四轮驱动系统 ——轴间差动限制装置
轴间差动限制装置多采用黏性耦合器、液压多片式离 合器或直接采用托森式差速器(Torsen LSD)。
黏液耦合器又称粘性联 轴节, 汽车上自动分配动力 的的装置,通常安装在以 前轮驱动为基础的四轮驱 动汽车上。这种汽车平时 按前轮驱动方式行驶。粘 性联轴节的最大特点就是 不需驾驶员操纵,可根据 需要自动把动力分配给后 驱动桥。
适时四轮驱动系统 ——结构
于可 驱 降以 动 相 低有 的 比 车效 结 全 身的 构 时 重减 要 四 量低 简 轮 。成 单 驱 本得动 ,多, 而,适 且这时 有不四 利仅轮
4.电控四轮驱动系统 ——优缺点
① 提高通过性。由于四轮驱动车辆的4个车轮都传递动力, 所以车辆所获得的驱动力是两轮驱动的2倍。且前后轮相互 支持,大大提高了在湿滑冰雪路面和凹凸不平路面的通过性。 ② 提高爬坡性。同理,四轮驱动的车辆可以爬上两轮驱动车 辆爬不上去的陡坡。 ③ 转弯性能极佳。轮胎的附着力与传输至道路的动力大小有 密切的关系,随动力的增大,轮胎的转弯力趋向减小。动力 减小,转弯力升高,提高湿滑路面与变换车道时的性能。 ④ 启动和加速性能极佳。四轮驱动的车辆,发动机功率平均 传递至所有4个车轮,4个车轮的附着力都可以被有效利用。 所以即使猛然将加速踏板踩到底,车轮也不可能空转,从而 提高了车辆的启动和加速性能。
黏液耦合器由一个内装若干紧密配合 的薄圆钢盘并充满粘稠液体硅油的圆筒 组成。
全时四轮驱动系统 ——轴间差动限制装置
液压多摩擦片式离合器是液 压多摩擦片接通系统的核心。 图为应用于VOLVO的液压多摩 擦片接通系统。液压多摩擦片 式离合器是当今最流行的限滑 技术,这套装置的主要组成部 分就是液压系统和摩擦片。摩 擦片分为两组,分别安装在差 速器壳与一侧半轴上。当液压 系统对摩擦片作用时,两组相 邻的摩擦片就会紧紧挤压在一 起,从而将差速器锁死,从而 达到限滑的目的。
同档次比较
Vs.
4MATIC
缺点: 1. 固定的扭矩分配缺乏灵活性; 2. 易造成动力流失降低驾驶乐 趣; X5,325xi, 330xi X Drive 3. 降低安全性;
E320,E430, S320
缺点: S60R, S80R AWD 1. 液力传动有动力损失; 2. 工作滞后; 3. 不够可靠;
全时四轮驱动系统 ——Full-Time 4WD
全时四轮驱动系统按照前后扭矩分配比 例的大小可分为固定扭矩分配方式和变动 扭矩分配方式两种。
② 变动扭矩分配方式是指汽车在 行进中能适应行驶状态和路面情 况的变化,自动将不同的扭距合 理地分配给前后车轮,使车轮驱 动力及转向力达到最佳配置,具 有良好的操纵稳定性和和行驶循 迹性。变动扭矩分配方式属于高 性能传动系统,常用于一些高性 能的轿车上。
四轮驱动技术(4WD)
——4WD的发展 一战:开始使用,运送兵员和武器 二战:机动部队的交通工具 战后:军事、野营、运输、通勤,开始向 轿车、轻型车普及
电控四轮驱动系统的分类
电控四轮驱动系统
分时四轮驱动系统
全时四轮驱动系统
适时四轮驱动系统
1.分时四轮驱动系统 ——Part-Time 4WD 部分时间采用四轮驱动模式,正常 时间仍采用前轮驱动或后轮驱动模式, 是一种可以根据驾驶者的意愿在两轮 驱动和四轮驱动之间切换选择的四轮 驱动系统。
全时四轮驱动系统 ——差速器的特点
MA
快
慢
M1
Mr
M2
内摩擦力矩(Mr )=星行齿轮摩擦力矩+半轴齿轮摩擦力矩
左半轴扭矩: M1=1/2(MA-Mr) 右半轴扭矩: M2=1/2(MA+Mr) 转动快的半轴获得的力矩小 转动慢的半轴获得的力矩大
全时四轮驱动系统 ——差速器的特点
对称式锥齿轮差速器特点总结 1、总是将转矩近似平均地分配给左右驱动轮。 2、当一侧驱动车轮因地面附着力小而空转,则另 一侧驱动轮获得的转矩与打滑驱动轮上很小的转 矩近似相等,致使车辆总牵引力不足而无法前进 行驶。
2.全时四轮驱动系统 ——Full-Time 4WD
全时四轮驱动,又称全轮驱动(AWD, All Wheel Drive),即全部时间都保持四轮 驱动模式,不能选择退出四轮驱动状态, 是常啮合式四轮驱动系统。应用全时四轮 驱动系统的车型并不是为了越野行驶,而 是在不良附着力的情况下(冰雪滑溜路面) 提高汽车的行驶性。