机械原理第十二章(我做)
西工大机械原理第八版课后练习题7-12

必发88 https:/// 必发88;
澳门皇冠金沙网站 https:/// 澳门皇冠金沙网站;
接下来的几天,方平一边保持气血修炼等待实测考到来,一边开始认真看专业考资料。 中途,方平也给老王打了几次电话,结果都无法接通。 考虑到老王可能办事去了,比如类似上次追击黄斌的事,方平也没再继续打。 他现在气血还在 稳定增长,没到无法增长的地步,暂时也不用急。 …… 一转眼,在方平修炼、看书中,时间到了7号。 5月7号。 实测考开始。 比起体检,实测考的人要少的多。 瑞阳报名武科考的学生一万多人,经过政审关、体检关,进入实测考的 只有千人左右。 市体育馆。 吴志豪虽然没彻底放松,不过还是比之前轻松的多。 等待考试的期间,吴志豪笑呵呵道:“其实只要不是气血太低,又完全靠吃药补上去的,平时坚持锻炼的话,过实测考不难。” 杨建也较为自信,笑容满 面道:“这一关我过考核应该没问题。 不过不仅要过,还要以最好的成绩过,这样才有希望考上武大。” 他气血不算太高,只能在其他项目上加分。 武大录取学生,不单纯的看气血。 当然,气血占比比较高,按照以往的惯例,气血起码 占50%,文化课25%,专业课15%,实测考10%。 不过也有个基础,比如气血要达到标准线,文化课也要如此。 这时候,其他项目考的越好,可供挑选的学校也越多。 他们自信,方平也不心虚。 实测考不是比实战,高中生没实战这个考核。 主要还是体能方面的考核,气血超过150卡,站桩达到站稳境的方平,体能不是一般的强。 实测考,他也不太在意。 (4)班几人,刘若琪是女生,实测考的时候比男生稍微有些优待,可优待有限。 这时候的刘若琪也没心思说话,她气血最低, 比杨建还低1卡,接下来的考试她都要考的特别优秀才有考上武大的希望。 不过她本来就是个闷葫芦,说不说话大家都不在意。 …… 考试,很快就正式开始。 第一个项目就是3000米的田径测试。 有最低要求,男子3000米要在10分 钟以内,超出10分钟直接淘汰。 女子则是放宽到12分钟以内。 用时越短,最终成绩越好,计入武科考总分。 这要求说高不高,说低绝对不算低。 普通人,国家三级运动员也就这标准了。 不过进入实测考的,最低气血都在112卡,比起 普通人气血都充足许多。 这种情况下,保持锻炼的话,跑出这成绩不算难。 方平这些人不是第一批测试的,不过几人都旁观了几轮。 进入实测考的水货不是太多…… 当然,不是没有。 几轮下来,检测了300多人,还是有20多人被淘 汰了,相对来说也不算太少了。 对这些水货,也没几个同情的。 气血这么高,又过了体检,说明身体没毛病。 身体没病的情况下,持续锻炼,过考核难度不大。 没过,要不状态不好。 要不就是纯粹嗑药怼上去的,对这种纯嗑药的,大 家嘴上不说,心里那是羡慕嫉妒恨。 现在被淘汰了,大家也乐得看到。 甚至巴不得多淘汰一些才好,这样一来,气血低的一些学生,也有希望考上武大。 很快,也轮到了方平这些人。 杨建第一个出场,这家伙别看块头大,却不是笨重。 成绩出来,杨建跑了9分08秒,都能达到二级运动员标准了。 第二个便是方平,方平跑长跑的时间不如杨建他们长,也可以看做是嗑药嗑上去的。 可他气血太高,骨骼又被淬炼了一次,桩功更是到了站稳境。 这种全方位的提升,哪怕他锻 炼的时间不如其他人,最后也跑出了8分25秒的成绩。 吴志豪几人看他的眼神,那叫一个羡慕嫉妒恨! 方平则是不在乎这些,而是有些感慨,前世的世界纪录,放在这辈子,分分钟就被那些武者给破了。 就连他自己,要是能多锻炼一段 时间,在跑步的时间全力爆发气血,他也能破世界纪录。 接下来没多久就到了吴志豪他们,也都轻松过关。 刘若琪跑步的时候也拼了命,最后她一个女生,居然跑进了10分钟以内。 实际上,女生能进入这一关的都不弱,方平发现,淘汰的 多的居然还是男生,女生反而没几个。 …… 跑步结束,接下来方平又参加了引体向上、仰卧起坐几个项目。 对方平而言,这些项目都很轻松。 其他人也大多数都是如此,气氛要比体检的时候轻松的多。 …… 上午9点的考试,一直 到12点多才彻底结束。 一出体育馆。 吴志豪就轻松道:“接下来都是动笔的事了,都是靠脑子,不靠气血和蛮力的事。 莽夫在前面两关有优势,后面就是我们的优势了……” 方平见他说话的时候,看着自己,不由黑脸道:“莽夫不喜 欢动脑子,喜欢动手,你想试试吗?” 吴志豪干笑道:“算了,我就不试了,文化人动口不动手……” “……” 几人说笑了一阵,吴志豪心情不错,非要请客,众人也不客气。 都是学生,也不在乎吃的好坏。 挑了一间私人小饭店, 点了几个菜,几人边聊天边等待着菜肴上桌。 这时候,饭店墙壁上挂着的电视正在播放新闻。 方平一开始也没在意,可很快就被吸引了注意力。 “天南行省,近日地面颤动不断,有宗师级武者深入地底探测,预测可能会有地动灾害发生 ……” 方平有些发愣,宗师级强者还能打洞深入地底? 能探测到地动变化,起码要深入上千米吧? 是借助机器、岩洞之类的,还是单纯的靠人力遁地? 方平不由得深想下去,自己是不是还是小看了宗师级强者? 方平震惊,吴志 豪几人却是见怪不怪。 杨建看了一眼电视,随意道:“这几年,地动次数好像有点多了。 不止咱们国家,其他国家也这样。 好在咱们国家宗师能提前预警,人倒是没事,每次经济损失可不小。” 吴志豪也接话道:“是挺多的,不过有时 候也不太准,预测错的时候也有。 前几年,听说魔都也有宗师预测,会有地动。 结果那次听说去了二十多位宗师强者,后来也没出现地动。 也不知道预测错的那位宗师,有没有被这些救援的宗师揍一顿!” 说后面的这句话,吴志豪压 低了声音,小声调侃,不敢大声说出来。 背后诽谤宗师没关系,别被人知道就行。 不过也就熟人之间,陌生人之间这种话题最好别提。 杨建闻言笑呵呵道:“咱们华国的宗师们也够负责的,一有地震或者其他灾害,都第一个跑过去救灾。 有时候想想,这大概就是宗师气度,思想觉悟不是咱们能比的。” “那是,宗师不可猜度……” 几人随口聊着,方平则是有些意外道:“每次救灾,宗师还亲自上阵?” “也不是每次都是,不过大多数时候,有灾害发生,宗师能过去的 一般都会过去帮忙。 所以每次灾害发生,有这些大人物安抚人心,哪怕受灾了,大家也不是太担心。” 吴志豪说这话的时候,还是比较自豪和敬佩的。 敬佩这些宗师的社会责任感,佩服他们的爱心,自豪于这些人都是华国的宗师。 几 人闲聊着,方平总觉得有些怪异,不过也没多想。 只能说,这辈子的宗师们的确都气度非凡。 能被称之为“宗师”,可见也不是单纯的依靠武力。 …… 就在方平他们看新闻的时候。 瑞阳市政府。 会议室。 几位瑞阳高层正在开 会。 会议室中,坐在中间位置的老者缓缓道:“天南公开消息了,说明情况不是太好,可能会压制不住。 就算能压制,也要征调不少高端武力过去坐镇。 每到这时候,都有些魑魅魍魉跳出来煽风点火,破坏社会秩序。 张总督这次亲自 带队去了天南,也带走了不少精锐武者。 南江虽然不是这些人破坏的重点,可也不得不做好防范。 侦缉局和军部这边做好防范工作,那些跳梁小丑来瑞阳搞破坏的概率不大,但是不能不防。 最近出外的人员,都佩戴枪械…… 另外宣 传阵线要严防死守,绝不能让这些人妖言惑众,扰乱人心!” 会议室其他人纷纷点头。 老者想了想又道:“另外,最近武科考还没结束,10号才会进行专业考。 这时候,瑞阳市区集中了不少今年的优秀考生。 这些年轻人都是未来的武 者种子,他们出了事,比我们这些人出事损失还要大! 侦缉局这边调派一些人手暗中进行保护,等到考试结束再撤回来。 军部方面,我会和他们打招呼,要求他们配合……” 老者将事情都吩咐了一遍,宣布会议结束。 等人都走了,老 者揉了揉太阳穴,尽管知道自己想的不应该,可老者还是希望,那些跳梁小丑就算要捣乱要搞破坏,也别来瑞阳,去别的地方好了。 瑞阳经济、武力都不算发达,在瑞阳地界搞破坏,瑞阳有时候很难镇压下去。 想着想着,老者又有些埋怨起 来,张总督这一突破七品,就有些静极思动了。 这次张总督要是不走,南江根本不用太过担忧。 可张总督不但走了,还带走了不少精锐,连瑞阳这边,军部都有不少精锐被调走了。 南江现在实力有些空虚,谁知道那些暗中的小丑会不会 来南江捣乱。
机械原理第十二章(我做的)
第9节 万向铰链机构
1.机构的组成及特点
(1)机构的组成 单万向铰链机构是指末端各有一叉的主、从动轴和中间“十” 字构件铰接而成的。
(2)工作特点
为变角传动机构,两轴的平均传动比为1; 但角速度比却不 恒等于1,而是随时间变化的。
2.机构的运动特性
单万向铰链机构,当主动轴Ⅰ以ω1等速回转时,从动轴Ⅱ的 ω2变化范围为 ω1cosα ≤ω2≤ω1/cosα 其变化幅度与两轴夹角α有关,一般α≤30°。
α Ft
A
o2
Fr
Pn sinα L
∵ F= Pn f
>
Fcosα L
代入得:
α
pn
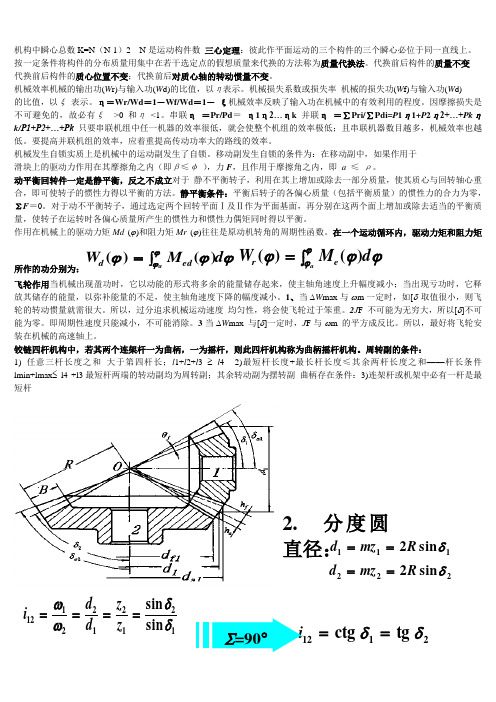
Σ =90° da
pt
α
齿偏角
tgα> f =tgφ
∴
α>φ
正压力-Pn
当 f=0.2 时,φ=11°30’ 通常取α =20°
o1
摩擦力-F
第2节 槽轮机构
1.槽轮机构的组成及工作特点
(1)机构组成 槽轮机构是由主动拨盘、从动槽 轮和机架等组成。 (2)工作特点 槽轮机构可将主动拨盘的等速回 转运动转变为槽轮时动时停的间歇运动, 并具有结构简单、外形尺寸小、 机械效率高,以及能较平稳的、间歇 地进行转位等优点,但存在柔性冲击 的缺点,故常用于速度不太高的场合。
2.螺旋机构的运动分析
当螺杆转过φ 时,螺母沿其轴向移动的距离为 s = lφ /(2π) 其中l为螺旋的导程 mm。 (1)微动螺旋机构 设螺旋机构中A、B段的螺旋导 程分别为lA、lB , 且两端螺旋的旋向 相同(即同为左旋或右旋),则当 螺杆1转过φ时,螺母2的位移s 为
螺杆 A段螺纹 螺母 2
(1)槽数z • 几何关系:
机械原理基础知识点总结,复习重点
机械原理知识点总结第一章平面机构的结构分析3一. 基本概念31. 机械: 机器与机构的总称。
32. 构件与零件33. 运动副34. 运动副的分类35. 运动链36. 机构3二. 基本知识和技能31. 机构运动简图的绘制与识别图32.平面机构的自由度的计算及机构运动确定性的判别33. 机构的结构分析4第二章平面机构的运动分析6一. 基本概念:6二. 基本知识和基本技能6第三章平面连杆机构7一. 基本概念7(一)平面四杆机构类型与演化7二)平面四杆机构的性质7二. 基本知识和基本技能8第四章凸轮机构8一.基本知识8(一)名词术语8(二)从动件常用运动规律的特性及选用原则8三)凸轮机构基本尺寸的确定8二. 基本技能9(一)根据反转原理作凸轮廓线的图解设计9(二)根据反转原理作凸轮廓线的解析设计10(三)其他10第五章齿轮机构10一. 基本知识10(一)啮合原理10(二)渐开线齿轮——直齿圆柱齿轮11(三)其它齿轮机构,应知道:12第六章轮系14一. 定轴轮系的传动比14二.基本周转(差动)轮系的传动比14三.复合轮系的传动比15第七章其它机构151.万向联轴节:152.螺旋机构163.棘轮机构164. 槽轮机构166. 不完全齿轮机构、凸轮式间歇运动机构177. 组合机构17第九章平面机构的力分析17一. 基本概念17(一)作用在机械上的力17(二)构件的惯性力17(三)运动副中的摩擦力(摩擦力矩)与总反力的作用线17二. 基本技能18第十章平面机构的平衡18一、基本概念18(一)刚性转子的静平衡条件18(二)刚性转子的动平衡条件18(三)许用不平衡量及平衡精度18(四)机构的平衡(机架上的平衡)18二. 基本技能18(一)刚性转子的静平衡计算18(二)刚性转子的动平衡计算18第十一章机器的机械效率18一、基本知识18(一)机械的效率18(二)机械的自锁19二. 基本技能20第十二章机械的运转及调速20一. 基本知识20(一)机器的等效动力学模型20(二)机器周期性速度波动的调节20(三)机器非周期性速度波动的调节20二. 基本技能20(一)等效量的计算20(二)飞轮转动惯量的计算20第一章平面机构的结构分析一. 基本概念1. 机械: 机器与机构的总称。
机械原理(第七版) 孙桓主编 第12章
八、其他常用机构1.将连续回转运动转换为单向间歇转动的机构有、、。
2.当原动件作等速转动时,为了使从动件获得间歇的转动,则可以采用机构。
(写出三种机构名称。
)3.欲将一匀速回转运动转变成单向间歇回转运动,采用的机构有、、等,其中间歇时间可调的机构是机构。
4.齿式棘轮机构制动爪的作用是。
5.径向槽均布的槽轮机构槽轮的最少槽数为。
6.槽数z=4的外啮合槽轮机构,主动销数最多应为。
7.不完全齿轮机构在运动过程中传动比是,而槽轮机构在运动过程中传动比则是。
8.单万向联轴节的转动不均匀系数随两轴夹角β的增大而。
9.传动两相交轴间的运动而又要求两轴间夹角经常变化时可以采用机构。
10.能实现间歇运动的机构有、、。
11.在棘轮机构中,为使棘爪能自动啮紧棘轮齿根不滑脱的条件是。
12.在齿式棘轮机构中,棘轮的模数m是与之比;槽轮的运动系数k是指在主动拨盘的内,时间t与时间t之比。
13.图示棘轮机构棘爪自动啮入的条件是。
14.四槽单销的外槽轮机构的运动系数为。
15.轮齿式棘轮机构的转角可以调整。
(A)有级;(B)无级16.在单销四槽的外槽轮机构中,槽轮转动的时间与静止的时间之比为。
17.有一外槽轮机构,已知槽轮的槽数z=4,转臂上装有一个圆销,则该槽轮机构的运动系k,静止系数k=。
数18.径向槽均布的外槽轮机构,其径向槽数最少数为,利用槽轮上的作为槽轮机构中的定位装置,齿式棘轮机构棘齿齿面的偏角φ应棘爪与棘齿间的摩擦角。
19.槽轮机构是由、、组成的。
对于原动件转一周槽轮只运动一次的单销外槽轮机构来说,槽轮的槽数应不小于;机构的运动特性系数总小于。
20.主动盘单圆销、径向槽均布的槽轮机构中,槽轮的最少槽数为个,槽数愈多柔性冲击将;在一个运动周期中,其时间与之比称为槽轮机构的运动特性系数k。
21.用单万向节传递相交轴之间的运动时,其瞬时角速比,平均角速比。
22.双万向节传递相交轴之间的运动,在满足下列条件时其主、从动轴角速比为1:193(1);(2)。
机械原理
机构中瞬心总数K=N (N-1)2 N 是运动构件数 三心定理:彼此作平面运动的三个构件的三个瞬心必位于同一直线上。
按一定条件将构件的分布质量用集中在若干选定点的假想质量来代换的方法称为质量代换法。
代换前后构件的质量不变 代换前后构件的质心位置不变;代换前后对质心轴的转动惯量不变。
机械效率机械的输出功(W r)与输入功(W d)的比值,以η表示。
机械损失系数或损失率 机械的损失功(W f)与输入功(W d) 的比值,以ξ 表示。
η=Wr/Wd =1-Wf/Wd =1- ξ机械效率反映了输入功在机械中的有效利用的程度。
因摩擦损失是不可避免的,故必有ξ >0和η <1。
串联η =Pr/Pd = η1η2…ηk 并联η =∑Pri/∑Pdi=P 1η1+P 2η2+…+Pk ηk/P1+P2+…+Pk 只要串联机组中任一机器的效率很低,就会使整个机组的效率极低;且串联机器数目越多,机械效率也越低。
要提高并联机组的效率,应着重提高传动功率大的路线的效率。
机械发生自锁实质上是机械中的运动副发生了自锁。
移动副发生自锁的条件为:在移动副中,如果作用于 滑块上的驱动力作用在其摩擦角之内(即β≤φ ),力F ,且作用于摩擦角之内,即 a ≤ ρ。
动平衡回转件一定是静平衡,反之不成立对于 静不平衡转子,利用在其上增加或除去一部分质量,使其质心与回转轴心重合,即可使转子的惯性力得以平衡的方法。
静平衡条件:平衡后转子的各偏心质量(包括平衡质量)的惯性力的合力为零,ΣF =0。
对于动不平衡转子,通过选定两个回转平面Ⅰ及Ⅱ作为平面基面,再分别在这两个面上增加或除去适当的平衡质量,使转子在运转时各偏心质量所产生的惯性力和惯性力偶矩同时得以平衡。
作用在机械上的驱动力矩Md (ϕ)和阻力矩Mr (ϕ)往往是原动机转角的周期性函数。
在一个运动循环内,驱动力矩和阻力矩所作的功分别为:飞轮作用当机械出现盈功时,它以动能的形式将多余的能量储存起来,使主轴角速度上升幅度减小;当出现亏功时,它释放其储存的能量,以弥补能量的不足,使主轴角速度下降的幅度减小。
机械原理(PDF)孙桓 复习笔记chapter12
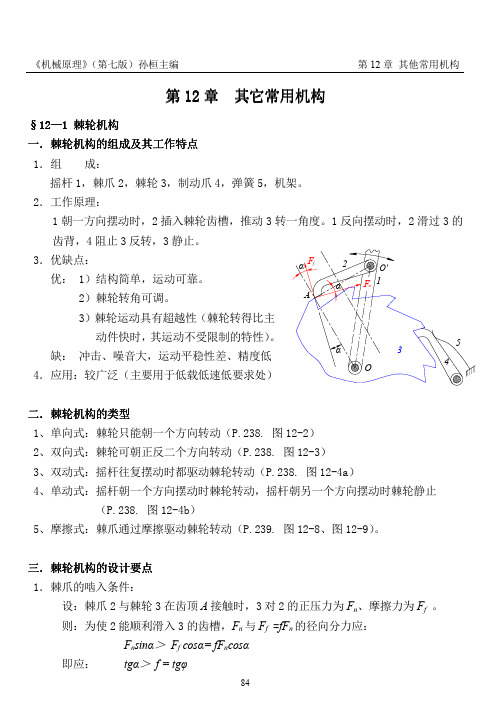
第12章 其它常用机构其它常用机构其它常用机构§12—1 1 棘轮机构棘轮机构棘轮机构一.棘轮机构的组成及其工作特点棘轮机构的组成及其工作特点1.组 成:摇杆1,棘爪2,棘轮3,制动爪4,弹簧5,机架。
2.工作原理:1朝一方向摆动时,2插入棘轮齿槽,推动3转一角度。
1反向摆动时,2滑过3的齿背,4阻止3反转,3静止。
优: 1)结构简单,运动可靠。
2)棘轮转角可调。
3)棘轮运动具有超越性(棘轮转得比主动件快时,其运动不受限制的特性)。
缺: 冲击、噪音大,运动平稳性差、精度低4.应用:较广泛(主要用于低载低速低要求处)类型棘轮机构的类型二.棘轮机构的类型1、单向式:棘轮只能朝一个方向转动(P.238. 图12-2)2、双向式:棘轮可朝正反二个方向转动(P.238. 图12-3)3、双动式:摇杆往复摆动时都驱动棘轮转动(P.238. 图12-4a)4、单动式:摇杆朝一个方向摆动时棘轮转动,摇杆朝另一个方向摆动时棘轮静止(P.238. 图12-4b)5、摩擦式:棘爪通过摩擦驱动棘轮转动(P.239. 图12-8、图12-9)。
三.棘轮机构的设计要点棘轮机构的设计要点1.棘爪的啮入条件:设:棘爪2与棘轮3在齿顶A接触时,3对2的正压力为F n、摩擦力为F f。
则:为使2能顺利滑入3的齿槽,F n与F f =fF n的径向分力应:F n sinα>F f cosα= fF n cosα即应: tgα>f = tgφ也即: α>φ (φ一棘爪2与棘轮3之间的摩擦角) 2.棘爪轴心O′的位置:O′的位置应使爪与轮在齿顶A 接触时,O′A ⊥OA ,因为这样棘爪的受力最小。
3.α的大小: 通常取α= 20°∵ f = 0.2时 φ= tg -1f = 11°30′ ∴ α= 20°总能满足棘爪的啮入条件§12—2 2 槽轮机构槽轮机构槽轮机构::一.槽轮机构的组成及工作特点槽轮机构的组成及工作特点1.组 成:带圆销的主动拨盘1,从动槽轮2,机架 2.工作原理:拨盘连续转动,当圆销未进入径向槽时,槽轮上的内凹圆弧nn 被拨盘上的外凸圆弧mm′m 锁住,槽轮静止;当圆销于A 进入径向槽到于B 退出径向槽时,nn 被松开,槽轮在圆销驱动下转过2φ2。
机械原理电子教案第12章(第25讲)
一、原动机的类型和特点(续)
2. 控制电动机(伺服电动机)
伺服电动机是指能精密控制系统位置和角度的 一类电动机。
特点: Evaluation only. eated with Asp它o体se积.S小li、de重s量fo轻r ;.N具E有T宽3广.5而C平li滑en的t P调r速of范ile 5.2.0
Copyright 2004-2011 Aspose Pty Ltd.
◆了解拟定简单机械传动系统方案的过程。
第十二章 机械总体方案的设计
本章教学内容
12-1 机械总体方案设计概述
12-2 机械执Ev行a系lua统ti的on方o案nly设. 计 eated with Aspose.Slides for .NET 3.5 Client Profile 5.2.0
型式
连
凸
其
机
结
杆
轮
它
构
构
机
机
机
组
变
构
构
构
合
异
§ 12-3 原动机的选择
一、原动机的类型和特点
1. 动力电动机
电动机的类型很多,不同类型的电动机具有不同的
结负构载型特式性和要特求性。,Ev可a满lu足at不io同n 的on工ly作. 环境和机械不同的 eated with Aspose.Slides for .NET 3.5 Client Profile 5.2.0
C围均o和为p快直yr速线ig响。ht应2能00力4,-2其01理1想A的sp机o械se特P性ty和L调td节.特性
应用; 伺服电机广泛应用于工业控制、军事、航空航
天等领域,如数控机床、工业机器人、火炮随动系 统中。
一、原动机的类型和特点(续)
机械原理课后全部习题解答

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
南航机械原理课件第12章-1
F b’ (m b ,r b) (m
,r
)
(m
,r
(m
)
F2
rb )
b,
Fb
16
2)平衡原理
先将各质径积(质量) 向平衡校正面上分解。
然后在各平衡校正面上进行平衡。 17
r WbI +
∑
r WiI = 0
r miI riI = 0
r mbI rbI +
或
∑
用图解法或解析法求出所加平衡量。
WbI = (−
∑ ∑
10
讨论两个问题
1)平衡前后质心位置 平衡前:
r r r F1 + F2 + F3 ≠ 0
∑
i =1
i i
3
r m i ri ≠ 0
xC
yC
∑ m x = ∑ m r cos α = ∑m ∑m ∑ m y = ∑ m r sin α = ∑m ∑m
i i i i i i i i i i
i
i
r r 2 F = m rω
C
O
r
采取什么措施?
4
措施:采取改变构件质量的 分布,达到减小或消除各构 件的惯性力所引起的运动副 中动压力和振动目的,这就 是机械的平衡。
ω
r r 2 F = mrω
C
O
r
5
二、机械平衡可分为以下两类
1)转子的平衡 转子:绕固定轴回转的构件。 一阶临界转速:转子第一次出现强烈振动时的转速。 刚性转子:工作转速低于此一阶临界转速的转速。 柔性转子:工作转速高于其一阶临界转速的转子。 2)机构的平衡 对机构惯性力的合力的平衡。
27
以铰链四杆机构为例说明机构静平衡的原理。
超全机械原理动图解析,让你一次看明白

超全机械原理动图解析,让你一次看明白1.棘轮机构1将驱动轴的连续旋转直接转换成驱动轴的间断性旋转的设备。
2.棘轮机构2此机制直接将驱动轴的连续旋转转换成驱动轴的间断性旋转。
通过下移蓝色棘爪无需改变输入的运动方向即可改变被驱动轴的运动方向。
3.钣金棘轮传动11)适用于轻负载2)低成本3)适用于大规模生产4)棘爪与棘轮的永久性接触由棘爪的重量维持4.钣金棘轮传动21)适用于轻负载2)低成本3)适用于大规模生产4)棘爪与棘轮的永久性接触由棘爪的重量维持5.棘轮机构3通过调整粉色后盖的位置可以得到绿色轮的不同旋转角度。
拉动橙色棘爪并使其旋转180°可以改变绿色轮的旋转方向。
此机制用于成形器。
6.棘轮机构4棘轮有内齿。
7.棘轮机构5自行车自由轮。
蓝色链轮从脚踏自行车接收运动。
黄色轮毂仅在蓝色链轮顺时针旋转时旋转。
黄色轮毂顺时针旋转对蓝色链轮没有影响。
由于弹簧的作用,红色棘爪总是压向链轮的内齿。
现实中使用了两个棘爪。
8.棘轮机构8绿色输入圆盘通过蓝色棘爪使得输出棘轮间断性旋转。
粉色和黄色销控制棘轮的停止时间。
每一个销使得棘轮在输入圆盘旋转1/8周期间停止。
由于弹簧(未显示)的作用,蓝色棘爪总是压向棘轮齿。
9.棘轮机构9有两个棘爪。
粉色棘爪推动棘轮。
绿色棘爪在粉色棘爪反向运动时维持棘轮静止。
10.棘轮机构12有两个棘爪。
绿色棘爪推动粉色齿轮,且不是一直与其接触(不同于普通棘轮机构)。
蓝色棘爪在绿色棘爪不推动齿轮时维持棘轮静止。
11.销齿轮棘轮机构1输入:粉色曲柄持续性旋转输出:黄色销齿轮12.棘轮机构13黄色输入圆盘通过橙色棘爪使得绿色输出棘轮间断性旋转。
蓝色凸轮的长度调节棘轮的运动时间。
13.棘轮机构15有两个棘爪。
粉色棘爪推动棘轮。
绿色棘爪在粉色棘爪反向时维持棘轮静止。
黄色凹槽凸轮为输入。
14.棘轮机构16输入:粉色曲柄的持续性恒速旋转。
15.棘轮机构31输入:绿色曲柄震荡输出:棘轮间断性旋转特点:内齿棘轮、外棘爪16.棘轮机构17输入:绿色偏心轴输出:灰色棘轮重力维持棘爪和棘轮的接触。
机械原理第十二章课后答案

第12章其他常用机构12-1棘轮机构除常用来实现间歇运动的功能外,还常用来实现什么功能?答:棘轮机构除了常用的间歇运动功能外,还能实现制动、进给、转位、分度、趙越运动等功能。
12-2某牛头刨床送进丝杠的导程为6mm,要求设计一棘轮机构,使每次送进呈可在0.2〜之间作有 级调整(共6级)。
设棘轮机构的棘爪由一曲柄摇杆机构的摇杆来推动,试绘出机构运动简图,并作必姜的计算 和说明。
解:牛头刨床送进机构的运动简图如图12-1所示,牛头刨床的横向进给是通过齿轮1、2,曲衲摇杆机构2、 3、4,練轮机构4、5、7来使与棘轮固连的丝杠6作间歇转动,从而使牛头刨床工作台实现横向间接进给。
通过 改变曲柄长度刃的大小可以改变进给的大小。
当棘爪7处于图示状态时,棘轮5沿逆时针方向作间歇进给运 动。
若将棘爪7拔出绕自身轴线转180°后再放下•由于棘爪工作面的改变.棘轮将改为沿顺时针方向间接进给。
G=^X360° = 12°O棘轮的齿数为360° 360° “0 12°设牛头刨床横向进给的初始位置如图12-1 (a)所示,则曲柄摇杆机构0。
2皿的极限位置为初始位置左右 转0/2,其中0为摇杆的摆角,极限位置如图12-1 (b)所示。
半-次进给量为0.2mm 时,帀为虽短,即得棘轮最小转角.2久 2穴 rac0 =〒仏二石".2 = 72。
每次送进量的调整方法:① 采用隐蔽棘轮罩来实现送进駅的调格:② 通过改变棘爪摆角來实现送进就的调整。
当一次进给虽为\.2tnm 时 即得棘轮最人转角当进给最为0.2/n/n 时,棘轮每次转过的角度为=—x0.2 = 6图(a)中所示,三个楝爪尖在練轮齿圈上的位置相互磅个齿風图(b)中所示,三个棘爪尖在練轮齿圈上的位買相互差I个齿距。
(a) (b)图12-212-4当电钟电压不足时,为什么步进式电钟的秒针只在原地震荡,而不能作整周回转?答:如图12-3所示为用于电钟的棘轮机构。
《机械原理》课件 第12章 其它常用机构
为棘轮的单向间歇运动
当主动件作逆时针方向摆动时,驱动 棘爪便插入棘轮的齿槽中,使棘轮跟 着转过一定角度,此时,制动爪在棘 轮的齿背上滑动。当主动件顺时针方 向转动时,制动爪便阻止棘轮发生顺 时针方向转动,而驱动棘爪却能够在 棘轮齿背上滑过,当主动件作连续的 往复摆动时,棘轮便作单向的间歇运 动。
二、槽轮机构的类型(续) 球面槽轮机构
动画
特点: 主动轮1和拨销3的 轴线均通过球心。
当只有一个拨销时, 动停时间相等;
当对称布置两个拨 销时,可以实现连 续转动。
二、槽论机构应用
一般用于转速不很高的自动机械、轻工机 械或仪器仪表中。 电 影 放 映 机 的 送 片 机 构
动画
12-3 凸轮式间歇运动机构
12-2 槽轮机构
一、槽轮机构的组成及工作特点
动画演示
典型槽轮机构的组成:由主动 拨盘、从动槽轮和机架等组成。
槽轮机构的工作原理:主动拨 盘连续转动,当主动拨盘的圆 销A未进入槽轮径向槽时,槽 轮在锁,静止不动;当主动拨 盘的圆销A进入槽轮径向槽时, 槽轮受圆销A驱动而转动。从 而使槽轮做间歇运动。
一、 万向联轴节机构的组成和应用 万向联轴节
万向联轴节机构用于传递两相交轴间的运动和动力, 广泛用于汽车、机床等机械中;
二、万向联轴节机构的类型
传动过程中,两轴 夹角可以变动,为 变角传动机构。
动画
◆单万向联轴节机构
两轴瞬时角速 比随时变化,并 不恒等于1
单万向联轴节机构两特殊位置的机构运动简图
2' = 1 / cos
本章教学内容
12-1棘轮机构 12-2槽轮机构螺旋机构 12-3凸轮式间歇运动机构 12-4不完全齿轮机构 12-5万向联轴节机构 12-6组合机构
《机械原理》(于靖军版)第12章习题答案
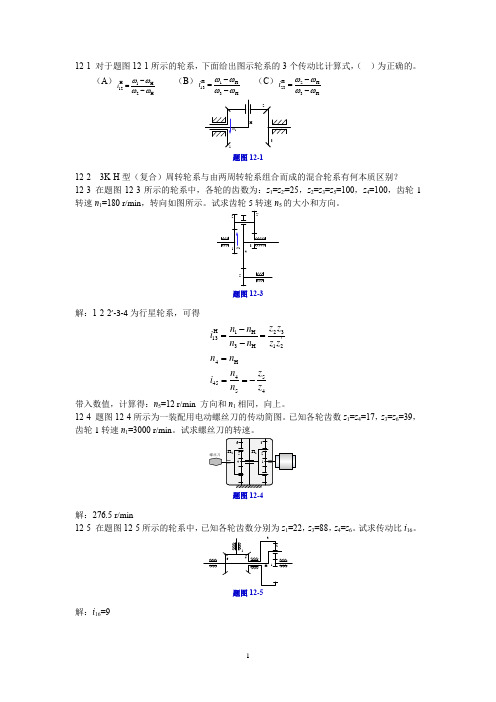
12-1 对于题图12-1所示的轮系,下面给出图示轮系的3个传动比计算式,( )为正确的。
(A )H 1H 122H i ωωωω-=-(B )H 1H 133H i ωωωω-=-(C )H 2H 233H i ωωωω-=-题图12-112-2 3K-H 型(复合)周转轮系与由两周转轮系组合而成的混合轮系有何本质区别?12-3 在题图12-3所示的轮系中,各轮的齿数为:z 1=z 2'=25,z 2=z 3=z 5=100,z 4=100,齿轮1转速n 1=180 r/min ,转向如图所示。
试求齿轮5转速n的大小和方向。
题图12-3解:1-2-2’-3-4为行星轮系,可得H 231H 13'3H 124H 544554z z n n i n n z z n n z n i n z -==-===-带入数值,计算得:n 5=12 r/min 方向和n 1相同,向上。
12-4 题图12-4所示为一装配用电动螺丝刀的传动简图。
已知各轮齿数z 1=z 4=17,z 3=z 6=39,齿轮1转速n 1=3000 r/min 。
试求螺丝刀的转速。
题图12-4解:276.5 r/min12-5 在题图12-5所示的轮系中,已知各轮齿数分别为z 1=22,z 3=88,z 4=z 6。
试求传动比i 16。
题图12-5解:i 16=912-6在题图12-6所示的轮系中,已知各轮齿数z1 =40,z2=z3=100,z4=z5=30,z6=20,z7=80,齿轮1转速n A=1000r/min,方向如图。
试求n B大小及方向。
解:n B=240 r/min 方向向上12-7 下题图12-7所示的轮系中,已知各齿轮的齿数分别为:z1 =80,z2=60,z2'=20,z3=40,z3'=20,z4= 30,z5=80。
轴A和轴B的转速分别为n A=50r/min,n B=60r/min,方向如图所示。
牛头刨床机械原理课程设计5、12点
课程设计说明书—牛头刨床1.机构简介牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨刀每次削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减少主轴的速度波动,以提高切削质量和减少电动机容量。
图1-11.导杆机构的运动分析已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。
要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。
以上内容与后面动态静力分析一起画在1号图纸上。
1.1设计数据牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作切削。
此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
为此刨床采用急回作用得导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需装飞轮来减小株洲的速度波动,以减少切削质量和电动机容量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.机构的恒等速条件
主动轴
1 α 中间轴 2
3
α
从动轴
O1
α
1 2 3
α
O3
双万向铰链机构的主、从动轴的角速度恒等的条件为 轴1、3和中间轴2应位于同一平面内; 轴1、3的轴线与中间轴2的轴线之间的夹角相等; 中间轴的两端的叉面应位于同一平面内。
说明:以上有极少部分内容参照网络课件(第10、 18、19、25页)
机械原理
第十二章 其他常用机构
12-1 12-2 12-8 12-9
棘轮机构 槽轮机构 螺旋机构 万向铰链机构
第1节 棘轮机构
1. 棘轮机构的组成及其工作特点
组成:摇杆、棘爪、棘轮、止动爪。
工作原理:摆杆往复摆动,棘 爪推动棘轮间歇转动。
优点:结构简单、制造方便、运动可靠、转角可调。 缺点:工作时有较大的冲击和噪声,并且运动精度 较差。
(1)螺旋机构的组成 螺旋机构是由螺杆、螺母和机架组成。 通常它是将旋转运动 转换为直线运动。但当导程角大于当量摩擦角时,它还可以将直 线运动转换为旋转运动。 (2)螺旋机构的特点 主要优点:能获得很多的减速比和力的增益;选择合适的螺 旋机构导程角,可获得机构的自锁性。 主要缺点:效率较低,特别是具有自锁性的螺旋机构效率低 于50%。 因此,螺旋机构常用于起重机、压力机以及功率不大的进给 系统和微调装置中。
(1)槽数z • 几何关系:
2 22 21 22 z z 2 21 z
•运动关系(运动特性系数τ ):
21 z 2 2 2z
(2)销数K
K ( z 2) 2z
2z K z2
第8节 螺旋机构
1.螺旋机构的组成及特点
2.螺旋机构的运动分析
当螺杆转过φ 时,螺母沿其轴向移动的距离为 s = lφ /(2π) 其中l为螺旋的导程 mm。 (1)微动螺旋机构 设螺旋机构中A、B段的螺旋导 程分别为lA、lB , 且两端螺旋的旋向 相同(即同为左旋或右旋),则当 螺杆1转过φ时,螺母2的位移s 为
螺杆 A段螺纹 螺母 2
(2)摩擦式棘轮机构
优点:噪声小、转角可 无极调节 缺点:运动准确性较差
棘轮机构的应用
在牛头刨床中通过棘轮机构实现工作台横向间 歇送进功能
四、棘轮机构的设计
要求在工作时,棘爪在Pn和F的作用下,能自动滑入棘轮齿槽。
条件是两者对O2的力矩要满足 如下条件:
L F
Mpn>MF
将两个力分解成切向和径向分量
第9节 万向铰链机构
1.机构的组成及特点
(1)机构的组成 单万向铰链机构是指末端各有一叉的主、从动轴和中间“十” 字构件铰接而成的。
(2)工作特点
为变角传动机构,两轴的平均传动比为1; 但角速度比却不 恒等于1,而是随时间变化的。
2.机构的运动特性
单万向铰链机构,当主动轴Ⅰ以ω1等速回转时,从动轴Ⅱ的 ω2变化范围为 ω1cosα ≤ω2≤ω1/cosα 其变化幅度与两轴夹角α有关,一般α≤30°。
o2
M p r
α Ft
A
Fr
Pn sinα L
∵ F= Pn f
>
Fcosα L
代入得:
pn
da
α
pt
Σ =90°
α
齿偏角
tgα> f =tgφ
∴
α>φ
正压力-Pn
当 f=0.2 时,φ=11°30’ 通常取α =20°
o1
摩擦力-F
第2节 槽轮机构
1.槽轮机构的组成及工作特点
(1)机构组成 槽轮机构是由主动拨盘、从动槽 轮和机架等组成。 (2)工作特点 槽轮机构可将主动拨盘的等速回 转运动转变为槽轮时动时停的间歇运动, 并具有结构简单、外形尺寸小、 机械效率高,以及能较平稳的、间歇 地进行转位等优点,但存在柔性冲击 的缺点,故常用于速度不太高的场合。
三、槽轮机构的特点和应用
特点:
•准确控制转角,效率高;
•结构简单,制造容易,工作可靠;
•动程不可调节。
应用:
在自动机械,轻工机械和仪表中,实现间歇 送进和转位功能
• 电影放映机的卷片机构
• 刀架转位机构
四、 槽轮机构的设计
1.几何要求
• 圆销线速度方向与轮槽方向
一致
2.设计要点 • 圆柱销与锁住弧配合 3.基本参数选择
3
2
A
1
B
3.螺旋机构的设计要点 螺旋设计的关键是选择确定合适的螺旋导程角、导 程及头数等参数。根据不同的工作要求,螺旋机构应选 择不同的几何参数。 若要求螺旋具有自锁性或具有较大的减速比(微动) 时,宜选用单头螺旋,宜选用较小的导程及导程角,但效 率较低。 若要求传递大的功率或快速运动的螺旋机构时,宜 采
• 外槽轮机构
特点:主从动轮转向相反
• 内槽轮机构
特点:
• 主从动轮转向相同; • 传动较平稳,停歇时间 短,所占空间小。
2.空间槽轮机构
特点:
• 传递相交轴的运动
3. 多销槽轮机构 特点:拨盘转一圈,槽轮间 歇转动2次。当径向槽径 向尺寸不同,拨盘上销分 布不均匀。槽轮转一周, 可以实现动停时间均不相 同的运动要求。
1 3
机架
B段螺纹
s=(lA-lB)φ /(2π)
因lA、lB 相差很小时,位移s可能很小,故这种螺旋机构称 为微动螺旋机构
如用于调节 此种机构常用测微计、分度机构及调节机构中。 镗刀进刀量的螺旋机构。
(2)复式螺旋机构 如果螺旋机构的两段螺旋导 程分别为lA、lB,且两端螺旋的旋 向相反。这种螺旋机构称为复式 螺旋机构。 则 s=(lA+lB)φ /(2π) 此种螺旋机构常用于车辆的连接。
故棘轮机构适用于速度较低和载荷不大的场合。
二、棘轮机构的类型及应用
1.根据啮合方式可分为: (1)外啮合棘轮机构
(2)内啮合棘轮机构
2.根据可动方向可分为: (1)单向式棘轮机构
(2)双向式棘轮机构
3.根据可动方式可分为:
(1)单动式棘轮机构
(2)双动式棘轮机构
4.根据接触方式又可分为: (1)齿啮式棘轮机构