QD77伺服参数设定
伺服参数设定

●伺服参数的初始设定1.按照下图设定“初始化设定位”。
#7 #6 #5 #4 #3 #2 #1 #0初始化设定位DGP#1:DGP 0:进行伺服参数的初始设定。
1:结束伺服参数的初始设定。
初始化设定完成后,第一位自动变为1。
这里,虽然发生000号报警,但是还不切断电源。
按下功能按键,找到伺服设定画面。
注意,请不要修改该参数的其他位参数。
2.按照下表设定“电机代码”。
读取伺服电机标签上的电机规格号(A06B-xxxx-Byyyy)的中间4位数字(xxxx)和电机型号名。
从下表中得到“电机代码”。
●αi s系列αis2/5000 0212 262αis2/6000 0234 284αis4/5000 0215 265αis8/6000 0240 240αi12/4000 0238 288αis22/4000 0265 315αis30/4000 0268 318αis40/4000 0272 322αis50/5000 0274 324 αis50/3000 FAN 0275-B□1□325αis100/2500 0285 335αis200/2500 0288 338αis300/2000 0292 342αis500/2000 0295 345 ●βi s系列βis 0.2/5000 0111 260βis 0.3/5000 0112 261βis 0.4/5000 0114 280βis 0.5/6000 0115 281βis 1/6000 0116 282βis 2/4000 0061 253βis 4/4000 0063 256βis 8/3000 0075 258βis 12/3000 0078 272βis 22/2000 0085 274所用伺服电机未列入此表中时,参见《伺服电机参数说明书》。
3.按照下表设定AMR 。
(电机的磁极对数设定) αis 电机 0 0 0 0 0 0 0 0 βis 电机4.利用CMR 使得CNC 的最小移动单位和伺服的检测单位相匹配。
伺服PID调节与域值设置

伺服电机PID控制及增益调节1、伺服电机3环电流环:最内环,此环在伺服启动器内进行,装在线圈上的霍尔元件通过检测磁场强度转化为电流,把电流负反馈给输入端。
电流环是控制的根本,任何控制都是通多电流来作为媒介控制的。
可用于转矩控制,通常有重力负载情况下使用。
例如如果10V对应5N的力,如果负载低于5N电机正转,如果高于5N电机反转。
速度环:通过检测电机编码器的信号频率来获得电机速度。
它的环内PID 输出直接就是电流环的设定输入,所以速度环包括了速度环和电流环。
用于速度控制。
位置环:最外环,通过检测电机编码器的计数并获得转动角度,通过编码器的频率获得速度。
位置环内部PID运算后的输出是速度环的设定输入,位置环的运算包括了所有环的计算,所以运算量最大。
用于位置控制,由于位置模式对速度和位置都有严格的控制,所以一般用于定位装置。
2、各环的工作计算原理和联系位置环:设定值:外部脉冲经过平滑滤波处理和电子齿轮计算后作为“设定的位置环的标准输入值”负反馈:编码器反馈的脉冲信号经过偏差计数器计算后的数值差值:设定值和负反馈之间的差值。
PID调节:将上面差值做PID调节(比例增益调节,无积分微分调节)速度环:设定值:位置环差值经PID调节后的值和位置环的设定值的和。
负反馈:编码器反馈的信号经过速度运算器的运算得到。
差值:设定值和负反馈之间的差值。
PID调节:将上面差值做PID调节(通常是比例增益调节,积分调节)电流环:设定值:速度环的差值经PID调节后的值。
负反馈:安装在线圈每相上的霍尔元件将磁场转换为电压电流信号作为反馈。
差值:设定值和负反馈之间的差值。
PID调节:将上面差值做PID调节。
最终:将上面电流环的PID调节后的值作为最终的输出值,将其电流作用在电机线圈上实现点机的控制。
3、PID调节比例控制(P):将输入的差值(误差信号)做比例放大,放大误差信号的强度值,这样作用于电机上就可以加强响应效果,使系统快速响应,减小残差。
伺服驱动器参数设置步骤

Torque/force limit value positive:400%
Torque/force limit value negative:-400%
Torque/forc/force limit value :400%
MAD160-C-0150-SA-S2-K-G-0-35-N1发动机型号
Temperature sensor:KTY84
2500Rpm需要设置
Acceleration factor: 1 需要设置
Ramp 2pitch:150rad/s与Deceleration ramp2:150rad/s需要设置
注:此软件为翻页就会保存修改数据,未提到的参数为默认制值
THANKS !!!
致力为企业和个人提供合同协议,策划案计划书,学习课件等等
打造全网一站式需求
欢迎您的下载,资料仅供参考
伺服驱动器参数
打开DriveTop软件之后出现下图画面选择“Online RS232 IndraDrive”
串口以及波特率选择如下图
参数设定首先进入“Operating mode selecting”菜单“Primary operation mode”一栏选择“velocity control”最后点击Next就可以进入以下参数设置画面
需设置
Drive Halt acceleration bipolar:800rad/s
Standstill window:5Rpm
Resolution of encoder emulat :2048 Counts/Rev
Maker pulse offset:0 Counts Maker pulse distance:2048 Counts
QD77缓冲区参数表

Cd.44 外部输入信号操作软元件 Cd.47 QD75MH的初始值设置请求 Cd.102 SSCNET控制指令 轴控制数据[Cd.3~] Cd.□ Cd.3 Cd.4 Cd.5 Cd.6 Cd.7 Cd.8 Cd.9
Cd.10 加速时间更改值 Cd.11 减速时间更改值 Cd.12 速度更改时的加减速时间更改允许/不允许选择 Cd.13 定位运行速度超驰 Cd.14 速度更改值 Cd.15 速度更改请求 Cd.16 寸动移动量 Cd.17 JOG速度 Cd.18 连续运行中断请求 Cd.19 原点回归请求标志OFF请求 Cd.20 手动脉冲发生器1脉冲输入倍率 Cd.21 手动脉冲发生器允许标志 Cd.22 转矩更改值/正转转矩更改值 Cd.23 速度·位置切换控制移动量更改寄存器 Cd.24 速度·位置切换允许标志 Cd.25 位置·速度切换控制速度更改寄存器 Cd.26 位置·速度切换允许标志 Cd.27 目标位置更改值(地址) Cd.28 目标位置更改值(速度) Cd.29 目标位置更改请求标志 Cd.43 同时启动对象轴 Cd.30 同时启动对象轴启动数据号(轴1启动数据号) 同时启动自轴启动数据号 Cd.31 同时启动对象轴启动数据号(轴2启动数据号) 同时启动对象轴1启动数据号 Cd.32 同时启动对象轴启动数据号(轴3启动数据号) 同时启动对象轴2启动数据号 Cd.33 同时启动对象轴启动数据号(轴4启动数据号) 同时启动对象轴3启动数据号 Cd.34 步模式 Cd.35 步有效标志 Cd.36 步启动信息 Cd.37 跳过指令 Cd.38 示教数据选择 Cd.39 示教定位数据号
轴号 QD77GF16 Un\G30120 Un\982556.xls/控制数据区
控制数据区
返回一览
伺服参数调节原则与方法

一.伺服驱动器对伺服电机的主要控制方式?位置控制、速度控制和转矩控制。
位置控制方式的特点:(机床设备等)是驱动器对电机的转速、转角和转矩均于控制,CNC对驱动器发脉冲串进行转速与转角的控制,输入的脉冲频率控制电机的转速,输入的脉冲个数控制电机旋转的角度。
脉冲频率f与电机转速n(rpm)、脉冲个数P与电机旋转角度β的关系参见下式:式中:G—电子齿轮比速度控制方式的特点:(传送带设备等)是驱动器仅对电机的转速和转矩进行控制,CNC对驱动器发出的是模拟量(电压)信号,范围为+10V~-10V,正电压控制电机正转,负电压控制电机反转,电压值的大小决定电机的转速。
电机的转角由CNC取驱动器反馈的A、B、Z编码器信号进行控制。
转矩控制方式的特点:(收放卷设备等)是驱动器仅对电机的转矩进行控制,电机输出的转矩不随负载改变,只听从于输入的转矩命令,CNC对驱动器发出的是模拟量(电压)信号,范围为+10V~-10V,正电压控制电机正转,负电压控制电机反转,电压值的大小决定电机输出的转矩。
电机的转速与转角由上位机控制。
二:什么是电子齿轮比(G)?当机械装置的传动比不能满足数控装置脉冲当量的要求时,用电子齿轮比,来配合数控装置与机械传动比之间的关系,满足数控装置所需要的脉冲当量。
它起到了一个输入与输出变比的作用。
电子齿轮比仅在位置控制中起作用。
电子齿轮比数值设置过大,会降低伺服电机的运行状态。
脉冲当量(M):CNC每变化一个最小数字单位时,要求相应的机械装置有一个设定的长度或角度的相应变化,称为脉冲当量,如0.001mm。
电机每转脉冲数(P):电机旋转一圈电机反馈元件反馈的脉冲数,计算方式为电机编码器的线数的4倍。
如:360×4=1440,2500×4=10000等。
丝杆螺距(L):指的是机械传动丝杆的螺纹之间的距离。
机械齿轮比(i):指的是减速机的机械齿轮比等。
电子齿轮比计算公式:G=(P ×M×i)÷L三:伺服驱动器速度环、位置环参数调整的原则是什么?伺服电机使用效果如何,除了与电机和驱动器的性能有关外,驱动器参数的调整也是一个十分关键的因素。
伺服参数调整方法
埃斯顿研发二部 2007.07.18
2021/6/21
1
一、伺服驱动器的参数调整理论基础
伺服驱动器包括三个反馈环节:位置环、速度 环以及电流环。最内环(电流环)的反应速度最快, 中间环节(速度环)的反应速度必须高于最外环 (位置环)。
如果不遵守此原则,将会造成电机运转的震动 或反应不良。伺服驱动器的设计可尽量确保电流环 具备良好的反应性能,故用户只需调整位置环与速 度环的增益即可。
数值设置太低: 速度环增益太低也会导致电机速度出现波动。比较速度
增益过高的情形可知,此时电机速度的波动频率更低。这充 分表明了速度环增益的提高使系统的工作频率得到了提高, 控制系统的快速响应性能好,能更有效地克服干扰作用的影 响。
此外,当速度环增益远小于位置环增益时,伺服的稳定 性也会被破坏,电机速度在运行过程中也会不断地波动。一 般情况下尽量保证速度环增益大于位置环增益。
图1 速度指令
2021/6/21
3
位置环增益不可超过机械系统的自然频率,否 则会产生较大的振荡。
当整个系统需要很快的反应时,仅仅确保采用 的伺服系统(控制器、伺服驱动器、电机以及编码 器)的快速反应是不够的,还必须要确保其控制的 机械系统也具有较高的刚性,这样才能使得整个系 统具有较好的刚性。
2021/6/21
通常可参照下列步骤对系统进行初步参数调整:
a)将位置环增益即先设在较低值,然后在不产生异常响声和 振动的前提下,逐渐增加速度环的增益至最大值。
b)逐渐降低速度环增益值,同时加大位置环增益。在整个响 应无超调、无振动的前提下,将位置环增益设至最大。
c)速度环积分时间常数取决于定位时间的长短,在机械系统 不振动的前提下,尽量减小此值。
数控机床-伺服参数设置
(5)关断电源,然后再打开电源. (6)进给齿轮比N/M(F.FG).
设定半闭环α脉冲编码器 (注1) F.FG分子(≤32767) F.FG分母(≤32767) = 电机每转所需的 位置反馈脉冲 1,000,000 (注2) (不能约分小数)
(7)移动方向
(8)速度脉冲数,位置脉冲数 ①串行αi脉冲编码器或串行α脉冲编码器时:
(10)FSSB显示和设定画面 通过一个高速串行总线(FANUC 串行伺服总线,或FSSB)连接CNC控制单 元到伺服放大器,只用用一根光缆,可显著减少机床电气的电缆使用量. 轴设定会根据轴和放大器内部之间关系自动计算并输入到FSSB设定画面.参 数1023,1905,1910-1919,1936和1937会按计算结果自动定义. ●显示 FSSB画面显示基于FSSB的放大器和轴 的信息 这个信息也可以通过操作指定. 1.按功能键 SYSTEM . 连续按向右软键几次,直到显示[FSSB]. FSSB设定画面包括:AMP SET,AXIS SET,和AMP MAINTENANCE. 按软键[AMP],则能显示AMP SET画面. 按软键[AXIS],则能显示AXIS SET画面. 按软键[MAINTE],则能显示AMP MAINTENANCE画面. 1.放大器设定画面 放大器设定画面包括两个部分:第一部分是显示通道号信息,第二部分显示脉冲 模块的信息.
�
SVS (#0)=1 (显示伺服画面)
伺服画面中的报警,对应相应的诊断画面如下表所示:
5.1 伺服参数的 初始化始设定数字伺服参数进行说明. 1.在紧急停状态,接通电源. 2.设定显示伺服设定调整画面的参数.
#0(SVS) 0:不显示伺服调整画面. 1:显示伺服调整画面. 3.暂时切断电源,再次开通电源. 4.按下面顺序,显示伺服参数的设定画面.按
伺服参数设置
4Байду номын сангаас
P1-44
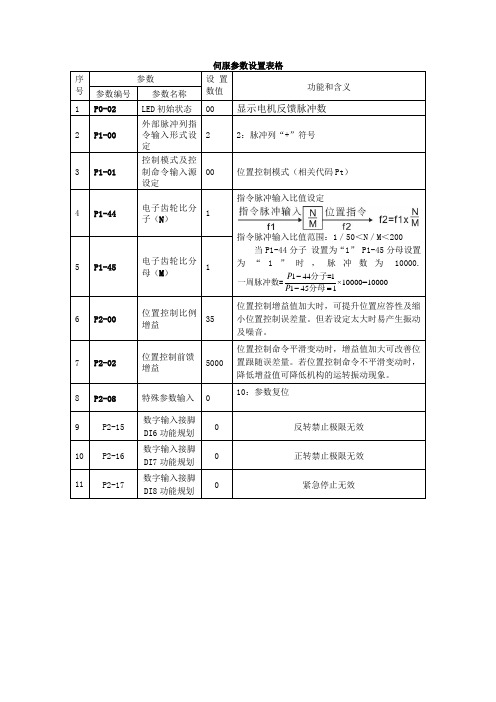
1 指令脉冲输入比值范围:1/50<N/M<200 当 P1-44 分子 设置为“1” P1-45 分母设置 为 “ 1 ” 时 , 脉 冲 数 为 10000.
一周脉冲数= P1 44分子=1 × 10000=10000 P1 45分母 1
5
P1-45
电子齿轮比分 母(M)
伺服参数设置表格 序 号 1 2 参数 参数编号 P0-02 P1-00 参数名称 LED 初始状态 外部脉冲列指 令输入形式设 定 控制模式及控 制命令输入源 设定 电子齿轮比分 子(N) 设 置 数值 00 2 功能和含义
显示电机反馈脉冲数
2:脉冲列“+”符号
3
P1-01
00
位置控制模式(相关代码 Pt) 指令脉冲输入比值设定
5000
8 9 10 11
P2-08 P2-15 P2-16 P2-17
0 0 0 0
反转禁止极限无效 正转禁止极限无效 紧急停止无效
1
6
P2-00
位置控制比例 增益
35
位置控制增益值加大时,可提升位置应答性及缩 小位置控制误差量。但若设定太大时易产生振动 及噪音。 位置控制命令平滑变动时,增益值加大可改善位 置跟随误差量。若位置控制命令不平滑变动时, 降低增益值可降低机构的运转振动现象。 10:参数复位
7
P2-02
位置控制前馈 增益 特殊参数输入 数字输入接脚 DI6 功能规划 数字输入接脚 DI7 功能规划 数字输入接脚 DI8 功能规划
(推荐)伺服驱动器参数设置方法
伺服驱动器参数设置方法在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
1.位置比例增益:设定位置环调节器的比例增益。
设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。
但数值太大可能会引起振荡或超调。
参数数值由具体的伺服系统型号和负载情况确定。
2.位置前馈增益:设定位置环的前馈增益。
设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
不需要很高的响应特性时,本参数通常设为0表示范围:0~100%3.速度比例增益:设定速度调节器的比例增益。
设置值越大,增益越高,刚度越大。
参数数值根据具体的伺服驱动系统型号和负载值情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较大的值。
4.速度积分时间常数:设定速度调节器的积分时间常数。
设置值越小,积分速度越快。
参数数值根据具体的伺服驱动系统型号和负载情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较小的值。
5.速度反馈滤波因子:设定速度反馈低通滤波器特性。
数值越大,截止频率越低,电机产生的噪音越小。
如果负载惯量很大,可以适当减小设定值。
数值太大,造成响应变慢,可能会引起振荡。
数值越小,截止频率越高,速度反馈响应越快。
如果需要较高的速度响应,可以适当减小设定值。
6.最大输出转矩设置:设置伺服驱动器的内部转矩限制值。
设置值是额定转矩的百分比,任何时候,这个限制都有效定位完成范围设定位置控制方式下定位完成脉冲范围。
伺服电机的调试方法

1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,山洋是设置1V 电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
菱机妙用伺服系统QD77模块基本设置方法

菱机妙用伺服系统QD77模块基本设置方法
欢迎来到《菱机妙用》栏目!
短视频形式授课,
一视频一功能,内容精炼直观。
控制产品、驱动产品、机器人......
全系列FA主流产品都在这里!
新功能、常用功能和典型应用,
你想要的全都有!
碎片时间学习系统知识,
随时随地自我提升!
本 | 期 | 看 | 点
伺服系统 QD77定位控制基本设置说明
伺服系统 QD77高级同步设置说明
看点一
伺服系统 QD77定位控制基本设置说明
点击视频快速掌握设置方法
操作步骤1. 根据实际型号进行模块的添加;
2. 打开简易运动模块设置软件界面;
3. 进行系统组态配置;
4. 进行参数的设置;
5. 进行定位数据的设置;
6. 运行,进行轴状态的监视。
看点二
伺服系统 QD77高级同步设置说明
点击视频快速掌握设置方法
操作步骤
1. 根据实际型号进行模块的添加;
2. 打开简易运动模块设置软件界面;
3. 进行系统组态配置;
4. 进行参数的设置;
5. 进行输入轴参数的设置;
6. 进行各轴同步参数的设置;
7.制作凸轮数据;
8. 运行,进行轴状态的监视。
伺服驱动器重要参数的设置方法和技巧
伺服驱动器重要参数的设置方法和技巧伺服驱动器重要参数的设置方法和技巧随着市场的发展和国内功率电子技术、微电子技术、计算机技术及控制原理等技术的进步,国内数控系统、交流伺服驱动器及伺服电动机这两年有了较大的发展,在某些应用领域打破了国外的垄断局面。
笔者因多年从事数控技术工作,使用了多套日本安川、松下、三洋等数字伺服,但最近因国产伺服性价比好,使用了一些数控技术公司生产的交流伺服驱动及电动机,对使用中某些方面总结了一些简单实用的技巧。
1KNDSD100基本性能1.1基本功能SD100采用国际上先进的数字信号处理器(DSP)TM320(S240)、大规模可编程门阵列(FPGA)、日本三菱的新一代智能化功率模块(1PM),集成度高,体积小,具有超速、过流、过载、主电源过压欠压、编码器异常和位置超差等保护功能。
与步进电动机相比,交流伺服电动机无失步现象。
伺服电动机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。
调速比宽1:5000,转矩恒定,1 r和2000r的扭矩基本一样,从低速到高速都具有稳定的转矩特性和很快的响应特性。
采用全数字控制,控制简单灵活。
用户通过参数修改可以对伺服的工作方式、运行特性作出适当的设置。
目前价格仅比步进电动机高2000~3000元。
1.2参数调整SD100为用户提供了丰富的用户参数0~59个,报警参数1~32个,监视方式(电动机转速,位置偏差等)22个。
用户可以根据不同的现场情况调整参数,以达到最佳控制效果。
几种常用的参数的含义是:(1)“0”号为密码参数,出厂值315,用户改变型号必须将此密码改为385。
"(2)“1”号为型号代码,对应同系列不同功率级别的驱动器和电动机。
(3)“4”号为控制方式选择,改变此参数可设置驱动器的控制方式。
其中,“0”为位置控制方式;“1”为速度控制方式;“2”为试运行控制方式;“3”为JOG控制方式;“4”为编码器调零方式;“5”为开环控制方式(用户测试电压及编码器);“6”为转矩控制方式。
QD77缓冲区参数表

1
QD77GF16 Un\G4300 Un\G4301 Un\G4302 Un\G4303 Un\G4304 Un\G4305 Un\G4306 Un\G4307 Un\G4308 Un\G4309 Un\G4310 Un\G4311 Un\G4312 Un\G4313 Un\G4314 Un\G4315 Un\G4316 Un\G4317 Un\G4318 Un\G4319 Un\G4320 Un\G4321 Un\G4322 Un\G4323 Un\G4324 Un\G4325 Un\G4326 Un\G4327 Un\G4328 Un\G4330 Un\G4331 Un\G4332 Un\G4334 Un\G4335 Un\G4336 Un\G4337 Un\G4338 Un\G4339
Un\G4395
缓冲存储器地址Un\G■
QD77MS4
QD77MS16
-
Un\G30120
-
Un\G30121
-
Un\G30122
-
Un\G30123
轴号
QD77GF16 Un\G4351 Un\G4352
-
-
-
Un\G4359 Un\G4363 Un\G4364 Un\G4365 Un\G4374 Un\G4375 Un\G4376 Un\G4377 Un\G4378 Un\G4379 Un\G4380 Un\G4381 Un\G4382 Un\G4384 Un\G4385
Un\G1521
Un\G4321
Un\G1522
Un\G4322
Un\G1523
Un\G4323
Un\G1524
Un\G4324
Un\G1525
QD77MS16模块参数

信号名称对应地址轴一轴二轴三轴四轴五轴六轴七轴八可编程控制器就绪Y0全部伺服ON Y1准备完毕X0发脉冲置ON X10X11X12X13X14X15X16X17定位启动Y10Y11Y12Y13Y14Y15Y16Y17出错检测G 2417.D G 2517.D G 2617.D G 2717.D G 2817.D G 2917.D G3017.D G3117.D 启动完成G 2417.E G 2517.E G 2617.E G 2717.E G 2817.E G 2917.E G3017.E G3117.E 定位完成G 2417.F G 2517.F G 2617.F G 2717.F G 2817.F G 2917.F G3017.F G3117.F 轴停止G30100.0G30110.0G30120.0G30130.0G30140.0G30150.0G30160.0G30170.0JOG 正转G30101.0G30111.0G30121.0G30131.0G30141.0G30151.0G30161.0G30171.0JOG 反转G30102.0G30112.0G30122.0G30132.0G30142.0G30152.0G30162.0G30172.0信号名称对应地址轴九轴十轴十一轴十二轴十三轴十四轴十五轴十六可编程控制器就绪Y0全部伺服ON Y1准备完毕X0发脉冲置ON X18X19X1A X1B X1C X1D X1E X1F 定位启动Y18Y19Y1A Y1B Y1C Y1D Y1E Y1F 出错检测G3217.D G3317.D G3417.D G3517.D G3617.D G3717.D G3817.D G3917.D 启动完成G3217.E G3317.E G3417.E G3517.E G3617.E G3717.E G3817.E G3917.E 定位完成G3217.F G3317.F G3417.F G3517.F G3617.F G3717.F G3817.F G3917.F 轴停止G30180.0G30190.0G30200.0G30210.0G30220.0G30230.0G30240.0G30250.0JOG 正转G30181.0G30191.0G30201.0G30211.0G30221.0G30231.0G30241.0G30251.0JOG 反转G30182.0G30192.0G30202.0G30212.0G30222.0G30232.0G30242.0G30252.0QD77MS16手动数据表(1)项目设置值设置范围默认值设置值缓冲存储器地址轴一轴二轴三轴四轴五轴六轴七轴八JOG正转0至1 (状态)0G30101.0G30111.0G30121.0G30131.0G30141.0G30151.0G30161.0G30171.0 JOG反转0至1 (状态)0G30102.0G30112.0G30122.0G30132.0G30142.0G30152.0G30162.0G30172.0JOG速度JOG速度限制范围内0G4318G4319G4418G4419G4518G4519G4618G4619G4718G4719G4818G4819G4918G4919G5018G5019微动移动量0至65535 (pulse)0G4317G4417G4517G4617G4717G4817G4917G5017加速时间10至8388608(pulse)1000G36G37G186G187G336G337G486G487G636G637G786G787G936G937G1086G1087加速时间20至8388608(pulse)1000G38G39G188G189G338G339G488G489G638G639G788G789G938G939G1088G1089加速时间30至8388608(pulse)1000G40G41G190G191G340G341G490G491G640G641G790G791G940G941G1090G1091减速时间10至8388608(pulse)1000G42G43G192G193G342G343G492G493G642G643G792G793G942G943G1092G1093减速时间20至8388608(pulse)1000G44G45G194G195G344G345G494G495G644G645G794G795G944G945G1094G1095减速时间30至8388608(pulse)1000G46G47G196G197G346G347G496G497G646G647G796G797G946G947G1096G1097JOG速度限制0至200000(pulse)20000G48G49G198G199G348G349G498G499G648G649G798G799G948G949G1098G1099QD77MS16手动数据表(1)项目设置值设置范围默认值设置值缓冲存储器地址轴一轴二轴三轴四轴五轴六轴七轴八JOG运行加速时间选择K0:加速时间00G50G200G350G500G650G800G950G1100 K1:加速时间1K2:加速时间2K3:加速时间3JOG运行减速时间选择K0:减速时间00G51G201G351G501G651G801G951G1101 K1:减速时间1K2:减速时间2k3:减速时间3QD77MS16手动数据表(2)项目设置值设置范围默认值设置值缓冲存储器地址轴九轴十轴十一轴十二轴十三轴十四轴十五轴十六JOG正转0至1 (状态)0G30181.0G30191.0G30201.0G30211.0G30221.0G30231.0G30241.0G30251.0 JOG反转0至1 (状态)0G30182.0G30192.0G30202.0G30212.0G30222.0G30232.0G30242.0G30252.0JOG速度JOG速度限制范围内0G5118G5119G5218G5219G5318G5319G5418G5419G5518G5519G5618G5619G5718G5719G5818G5819微动移动量0至65535 (pulse)0G5117G5217G5317G5417G5517G5617G5717G5817加速时间10至8388608(pulse)1000G1236G1237G1386G1387G1536G1537G1686G1687G1836G1837G1986G1987G2136G2137G2286G2287加速时间20至8388608(pulse)1000G1238G1239G1388G1389G1538G1539G1688G1689G1838G1839G1988G1989G2138G2139G2288G2289加速时间30至8388608(pulse)1000G1240G1241G1390G1391G1540G1541G1690G1691G1840G1841G1990G1991G2140G2141G2290G2291减速时间10至8388608(pulse)1000G1242G1243G1392G1393G1542G1543G1692G1693G1842G1843G1992G1993G2142G2143G2292G2293减速时间20至8388608(pulse)1000G1244G1245G1394G1395G1544G1545G1694G1695G1844G1845G1994G1995G2144G2145G2294G2295减速时间30至8388608(pulse)1000G1246G1247G1396G1397G1546G1547G1696G1697G1846G1847G1996G1997G2146G2147G2296G2297JOG速度限制0至200000(pulse)20000G1248G1249G1398G1399G1548G1549G1698G1699G1848G1849G1998G1999G2148G2149G2298G2299QD77MS16手动数据表(2)项目设置值设置范围默认值设置值缓冲存储器地址轴九轴十轴十一轴十二轴十三轴十四轴十五轴十六JOG运行加速时间选择K0:加速时间00G1250G1400G1550G1700G1850G2000G2150G2300 K1:加速时间1K2:加速时间2K3:加速时间3JOG运行减速时间选择K0:减速时间00G1251G1401G1551G1701G1851G2001G2151G2301 K1:减速时间1K2:减速时间2k3:减速时间3QD77MS16OPR数据表格(1)项目设置值设置范围默认值设置值缓冲存储器地址轴一轴二轴三轴四轴五轴六轴七轴八回原方法K0:近点狗方法0G70G220G370G520G670G820G970G1120 K1:限位器1K2:限位器2K3:限位器3K4:计数1K5:计数2回原复归方向K0:正向0G71G221G371G521G671G821G971G1121 K1:反向原点完成地址-2147483648至2147483647(脉冲)0G72G73G222G223G372G373G522G523G672G673G822G823G972G973G1122G1123回原高速 1 至 200000 pulse/s1G74G75G224G225G374G375G524G525G674G675G824G825G974G975G1124G1125爬行速度 1 至 200000 pulse/s1G76G77G226G227G376G377G526G527G676G677G826G827G976G977G1126G1127原点复归重试K0:不通过极限开关进行原点复归重试0G78G228G378G528G678G828G978G1128 k1:通过极限开关进行原点复归重试QD77MS16OPR数据表格(1)项目设置值设置范围默认值设置值缓冲存储器地址轴一轴二轴三轴四轴五轴六轴七轴八近点狗ON后的移动量设置0~2147483647(pulse)0G80 G81G230G231G380G381G530G531G680G681G830G831G980G981G1130G1131原点复归加速时间选择K0:加速时间00G82G232G382G532G682G832G982G1132 K1:加速时间1K2:加速时间2K3:加速时间3原点复归减速时间选择K0:减速时间00G83G233G383G533G683G833G983G1133 K1:减速时间1K2:减速时间2k3:减速时间3QD77MS16OPR数据表格(2)项目设置值设置范围默认值设置值缓冲存储器地址轴九轴十轴十一轴十二轴十三轴十四轴十五轴十六回原方法K0:近点狗方法0G1270G1420G1570G1720G1870G2020G2170G2320 K1:限位器1K2:限位器2K3:限位器3K4:计数1K5:计数2回原复归方向K0:正向0G1271G1421G1571G1721G1871G2021G2171G2321 K1:反向原点完成地址-2147483648至2147483647(脉冲)0G1272G1273G1422G1423G1572G1573G1722G1723G1872G1873G2022G2023G2172G2173G2322G2323回原高速 1 至 200000 pulse/s1G1274G1275G1424G1425G1574G1575G1724G1725G18G674G1875G2024G2025G2174G2175G2324G2325爬行速度 1 至 200000 pulse/s1G1276G1277G1426G1427G1576G1577G1726G1727G1876G1877G2026G2027G2176G2177G2326G2327原点复归重试K0:不通过极限开关进行原点复归重试0G1278G1428G1578G1728G1878G2028G2178G2328 k1:通过极限开关进行原点复归重试QD77MS16OPR数据表格(2)项目设置值设置范围默认值设置值缓冲存储器地址轴九轴十轴十一轴十二轴十三轴十四轴十五轴十六近点狗ON后的移动量设置0~2147483647(pulse)0G1280G1281G1430G1431G1580G1581G1730G1731G1880G1881G2030G2031G2180G2181G2330G2331原点复归加速时间选择K0:加速时间00G1282G1432G1582G1732G1882G2032G2182G2332 K1:加速时间1K2:加速时间2K3:加速时间3原点复归减速时间选择K0:减速时间00G1283G1433G1583G1733G1883G2033G2183G2333 K1:减速时间1K2:减速时间2k3:减速时间3项目控制模式设置值默认值轴一轴二轴三轴四轴五轴六轴七轴八运行模式定位结束000000H G6000G7000G8000G9000G10000G11000G12000G13000连续定位控制01连续轨迹控制11控制方法ABS 直线 101H INC 直线02定距进给 103H 正转 速度 104H 反转 速度 105H 正转 速·位06H反转 速·位07H正转 位·速08H反转 位·速09HABS 直线 20AHINC 直线 20BH定距进给 20CHABS 圆弧插补0DH项目控制模式设置值默认值轴一轴二轴三轴四轴五轴六轴七轴八控制方法INC 圆弧插补0EH0000H G6000G7000G8000G9000G10000G11000G12000G13000 ABS 圆弧右0FHABS 圆弧左10HINC 圆弧右11HINC 圆弧左12H正转速度 213H反转速度 214HABS 直线 315HINC 直线 316H定距进给 317H正转速度 318H反转速度 319HABS 直线 41AHINC 直线 41BH定距进给 41CH正转速度 41DH项目控制模式设置值默认值轴一轴二轴三轴四轴五轴六轴七轴八控制方法反转 速度 41EH 0000H G6000G7000G8000G9000G10000G11000G12000G13000NOP80H 当前值更改81H JUMP 指令82H LOOP(次数)83H LEND84H 加速时间加速时间 000加速时间 101加速时间 110加速时间 311减速时间减速时间 000减速时间 101减速时间 210减速时间 311项目控制模式设置值默认值轴九轴十轴十一轴十二轴十三轴十四轴十五轴十六运行模式定位结束000000H G14000G15000G16000G17000G18000G19000G20000G21000连续定位控制01连续轨迹控制11控制方法ABS 直线 101H INC 直线02定距进给 103H 正转 速度 104H 反转 速度 105H 正转 速·位06H反转 速·位07H正转 位·速08H反转 位·速09HABS 直线 20AHINC 直线 20BH定距进给 20CHABS 圆弧插补0DH项目控制模式设置值默认值轴九轴十轴十一轴十二轴十三轴十四轴十五轴十六控制方法INC 圆弧插补0EH0000H G14000G15000G16000G17000G18000G19000G20000G21000 ABS 圆弧右0FHABS 圆弧左10HINC 圆弧右11HINC 圆弧左12H正转速度 213H反转速度 214HABS 直线 315HINC 直线 316H定距进给 317H正转速度 318H反转速度 319HABS 直线 41AHINC 直线 41BH定距进给 41CH正转速度 41DH项目控制模式设置值默认值轴九轴十轴十一轴十二轴十三轴十四轴十五轴十六控制方法反转 速度 41EH 0000H G14000G15000G16000G17000G18000G19000G20000G21000NOP80H 当前值更改81H JUMP 指令82H LOOP(次数)83H LEND84H 加速时间加速时间 000加速时间 101加速时间 110加速时间 311减速时间减速时间 000减速时间 101减速时间 210减速时间 311项目指定插补轴设置值默认值轴一轴二轴三轴四轴五轴六轴七轴八插补对象轴轴 1 指定0H0000H G6003G7003G8003G9003G10003G11003G12003G13003轴 2 指定1H轴 3 指定2H轴 4 指定3H轴 5 指定4H轴 6 指定5H轴 7 指定6H轴 8 指定7H轴 9 指定8H轴 10 指定9H轴 11 指定AH轴 12 指定BH轴 13 指定CH轴 14 指定DH轴 15 指定EH轴 16 指定FH项目指定插补轴设置值默认值轴九轴十轴十一轴十二轴十三轴十四轴十五轴十六插补对象轴轴 1 指定0H0000H G14003G15003G16003G17003G18003G19003G20003G21003轴 2 指定1H轴 3 指定2H轴 4 指定3H轴 5 指定4H轴 6 指定5H轴 7 指定6H轴 8 指定7H轴 9 指定8H轴 10 指定9H轴 11 指定AH轴 12 指定BH轴 13 指定CH轴 14 指定DH轴 15 指定EH轴 16 指定FH轴一启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G43001G6000G6003G6004 (双字)G6006 (双字)G6008 (双字) 2G6010G6013G6014 (双字)G6016 (双字)G6018 (双字) 3G6020G6023G6024 (双字)G6026 (双字)G6028 (双字) 4G6030G6033G6034 (双字)G6036 (双字)G6038 (双字) 5G6040G6043G6044 (双字)G6046 (双字)G6048 (双字) 6G6050G6053G6054 (双字)G6056 (双字)G6058 (双字) 7G6060G6063G6064 (双字)G6066 (双字)G6068 (双字) 8G6070G6073G6074 (双字)G6076 (双字)G6078 (双字) 9G6080G6083G6084 (双字)G6086 (双字)G6088 (双字) 10G6090G6093G6094 (双字)G6096 (双字)G6098 (双字)轴一启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G430011G6100G6103G6104 (双字)G6106 (双字)G6108 (双字) 12G6110G6113G6114 (双字)G6116 (双字)G6118 (双字) 13G6120G6123G6124 (双字)G6126 (双字)G6128 (双字) 14G6130G6133G6134 (双字)G6136 (双字)G6138 (双字) 15G6140G6143G6144 (双字)G6146 (双字)G6148 (双字) 16G6150G6153G6154 (双字)G6156 (双字)G6158 (双字) 17G6160G6163G6164 (双字)G6166 (双字)G6168 (双字) 18G6170G6173G6174 (双字)G6176 (双字)G6178 (双字) 19G6180G6183G6184 (双字)G6186 (双字)G6188 (双字) 20G6190G6193G6194 (双字)G6196 (双字)G6198 (双字)轴二启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G44001G7000G7003G7004 (双字)G7006 (双字)G7008 (双字) 2G7010G7013G7014 (双字)G7016 (双字)G7018 (双字) 3G7020G7023G7024 (双字)G7026 (双字)G7028 (双字) 4G7030G7033G7034 (双字)G7036 (双字)G7038 (双字) 5G7040G7043G7044 (双字)G7046 (双字)G7048 (双字) 6G7050G7053G7054 (双字)G7056 (双字)G7058 (双字) 7G7060G7063G7064 (双字)G7066 (双字)G7068 (双字) 8G7070G7073G7074 (双字)G7076 (双字)G7078 (双字) 9G7080G7083G7084 (双字)G7086 (双字)G7088 (双字) 10G7090G7093G7094 (双字)G7096 (双字)G7098 (双字)轴二启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G440011G7100G7103G7104 (双字)G7106 (双字)G7108 (双字) 12G7110G7113G7114 (双字)G7116 (双字)G7118 (双字) 13G7120G7123G7124 (双字)G7126 (双字)G7128 (双字) 14G7130G7133G7134 (双字)G7136 (双字)G7138 (双字) 15G7140G7143G7144 (双字)G7146 (双字)G7148 (双字) 16G7150G7153G7154 (双字)G7156 (双字)G7158 (双字) 17G7160G7163G7164 (双字)G7166 (双字)G7168 (双字) 18G7170G7173G7174 (双字)G7176 (双字)G7178 (双字) 19G7180G7183G7184 (双字)G7186 (双字)G7188 (双字) 20G7190G7193G7194 (双字)G7196 (双字)G7198 (双字)轴三启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G45001G8000G8003G8004 (双字)G8006 (双字)G8008 (双字) 2G8010G8013G8014 (双字)G8016 (双字)G8018 (双字) 3G8020G8023G8024 (双字)G8026 (双字)G8028 (双字) 4G8030G8033G8034 (双字)G8036 (双字)G8038 (双字) 5G8040G8043G8044 (双字)G8046 (双字)G8048 (双字) 6G8050G8053G8054 (双字)G8056 (双字)G8058 (双字) 7G8060G8063G8064 (双字)G8066 (双字)G8068 (双字) 8G8070G8073G8074 (双字)G8076 (双字)G8078 (双字) 9G8080G8083G8084 (双字)G8086 (双字)G8088 (双字) 10G8090G8093G8094 (双字)G8096 (双字)G8098 (双字)轴三启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G450011G8100G8103G8104 (双字)G8106 (双字)G8108 (双字) 12G8110G8113G8114 (双字)G8116 (双字)G8118 (双字) 13G8120G8123G8124 (双字)G8126 (双字)G8128 (双字) 14G8130G8133G8134 (双字)G8136 (双字)G8138 (双字) 15G8140G8143G8144 (双字)G8146 (双字)G8148 (双字) 16G8150G8153G8154 (双字)G8156 (双字)G8158 (双字) 17G8160G8163G8164 (双字)G8166 (双字)G8168 (双字) 18G8170G8173G8174 (双字)G8176 (双字)G8178 (双字) 19G8180G8183G8184 (双字)G8186 (双字)G8188 (双字) 20G8190G8193G8194 (双字)G8196 (双字)G8198 (双字)轴四启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G46001G9000G9003G9004 (双字)G9006 (双字)G9008 (双字) 2G9010G9013G9014 (双字)G9016 (双字)G9018 (双字) 3G9020G9023G9024 (双字)G9026 (双字)G9028 (双字) 4G9030G9033G9034 (双字)G9036 (双字)G9038 (双字) 5G9040G9043G9044 (双字)G9046 (双字)G9048 (双字) 6G9050G9053G9054 (双字)G9056 (双字)G9058 (双字) 7G9060G9063G9064 (双字)G9066 (双字)G9068 (双字) 8G9070G9073G9074 (双字)G9076 (双字)G9078 (双字) 9G9080G9083G9084 (双字)G9086 (双字)G9088 (双字) 10G9090G9093G9094 (双字)G9096 (双字)G9098 (双字)轴四启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G460011G9100G9103G9104 (双字)G9106 (双字)G9108 (双字) 12G9110G9113G9114 (双字)G9116 (双字)G9118 (双字) 13G9120G9123G9124 (双字)G9126 (双字)G9128 (双字) 14G9130G9133G9134 (双字)G9136 (双字)G9138 (双字) 15G9140G9143G9144 (双字)G9146 (双字)G9148 (双字) 16G9150G9153G9154 (双字)G9156 (双字)G9158 (双字) 17G9160G9163G9164 (双字)G9166 (双字)G9168 (双字) 18G9170G9173G9174 (双字)G9176 (双字)G9178 (双字) 19G9180G9183G9184 (双字)G9186 (双字)G9188 (双字) 20G9190G9193G9194 (双字)G9196 (双字)G9198 (双字)轴五启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G47001G10000G10003G10004 (双字)G10006 (双字)G10008 (双字) 2G10010G10013G10014 (双字)G10016 (双字)G10018 (双字) 3G10020G10023G10024 (双字)G10026 (双字)G10028 (双字) 4G10030G10033G10034 (双字)G10036 (双字)G10038 (双字) 5G10040G10043G10044 (双字)G10046 (双字)G10048 (双字) 6G10050G10053G10054 (双字)G10056 (双字)G10058 (双字) 7G10060G10063G10064 (双字)G10066 (双字)G10068 (双字) 8G10070G10073G10074 (双字)G10076 (双字)G10078 (双字) 9G10080G10083G10084 (双字)G10086 (双字)G10088 (双字) 10G10090G10093G10094 (双字)G10096 (双字)G10098 (双字)轴五启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G470011G10100G10103G10104 (双字)G10106 (双字)G10108 (双字) 12G10110G10113G10114 (双字)G10116 (双字)G10118 (双字) 13G10120G10123G10124 (双字)G10126 (双字)G10128 (双字) 14G10130G10133G10134 (双字)G10136 (双字)G10138 (双字) 15G10140G10143G10144 (双字)G10146 (双字)G10148 (双字) 16G10150G10153G10154 (双字)G10156 (双字)G10158 (双字) 17G10160G10163G10164 (双字)G10166 (双字)G10168 (双字) 18G10170G10173G10174 (双字)G10176 (双字)G10178 (双字) 19G10180G10183G10184 (双字)G10186 (双字)G10188 (双字) 20G10190G10193G10194 (双字)G10196 (双字)G10198 (双字)轴六启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G48001G11000G11003G11004 (双字)G11006 (双字)G11008 (双字) 2G11010G11013G11014 (双字)G11016 (双字)G11018 (双字) 3G11020G11023G11024 (双字)G11026 (双字)G11028 (双字) 4G11030G11033G11034 (双字)G11036 (双字)G11038 (双字) 5G11040G11043G11044 (双字)G11046 (双字)G11048 (双字) 6G11050G11053G11054 (双字)G11056 (双字)G11058 (双字) 7G11060G11063G11064 (双字)G11066 (双字)G11068 (双字) 8G11070G11073G11074 (双字)G11076 (双字)G11078 (双字) 9G11080G11083G11084 (双字)G11086 (双字)G11088 (双字) 10G11090G11093G11094 (双字)G11096 (双字)G11098 (双字)轴六启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G480011G11100G11103G11104 (双字)G11106 (双字)G11108 (双字) 12G11110G11113G11114 (双字)G11116 (双字)G11118 (双字) 13G11120G11123G11124 (双字)G11126 (双字)G11128 (双字) 14G11130G11133G11134 (双字)G11136 (双字)G11138 (双字) 15G11140G11143G11144 (双字)G11146 (双字)G11148 (双字) 16G11150G11153G11154 (双字)G11156 (双字)G11158 (双字) 17G11160G11163G11164 (双字)G11166 (双字)G11168 (双字) 18G11170G11173G11174 (双字)G11176 (双字)G11178 (双字) 19G11180G11183G11184 (双字)G11186 (双字)G11188 (双字) 20G11190G11193G11194 (双字)G11196 (双字)G11198 (双字)轴七启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G49001G12000G12003G12004 (双字)G12006 (双字)G12008 (双字) 2G12010G12013G12014 (双字)G12016 (双字)G12018 (双字) 3G12020G12023G12024 (双字)G12026 (双字)G12028 (双字) 4G12030G12033G12034 (双字)G12036 (双字)G12038 (双字) 5G12040G12043G12044 (双字)G12046 (双字)G12048 (双字) 6G12050G12053G12054 (双字)G12056 (双字)G12058 (双字) 7G12060G12063G12064 (双字)G12066 (双字)G12068 (双字) 8G12070G12073G12074 (双字)G12076 (双字)G12078 (双字) 9G12080G12083G12084 (双字)G12086 (双字)G12088 (双字) 10G12090G12093G12094 (双字)G12096 (双字)G12098 (双字)轴七启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G490011G12100G12103G12104 (双字)G12106 (双字)G12108 (双字) 12G12110G12113G12114 (双字)G12116 (双字)G12118 (双字) 13G12120G12123G12124 (双字)G12126 (双字)G12128 (双字) 14G12130G12133G12134 (双字)G12136 (双字)G12138 (双字) 15G12140G12143G12144 (双字)G12146 (双字)G12148 (双字) 16G12150G12153G12154 (双字)G12156 (双字)G12158 (双字) 17G12160G12163G12164 (双字)G12166 (双字)G12168 (双字) 18G12170G12173G12174 (双字)G12176 (双字)G12178 (双字) 19G12180G12183G12184 (双字)G12186 (双字)G12188 (双字) 20G12190G12193G12194 (双字)G12196 (双字)G12198 (双字)轴八启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G50001G13000G13003G13004 (双字)G13006 (双字)G13008 (双字) 2G13010G13013G13014 (双字)G13016 (双字)G13018 (双字) 3G13020G13023G13024 (双字)G13026 (双字)G13028 (双字) 4G13030G13033G13034 (双字)G13036 (双字)G13038 (双字) 5G13040G13043G13044 (双字)G13046 (双字)G13048 (双字) 6G13050G13053G13054 (双字)G13056 (双字)G13058 (双字) 7G13060G13063G13064 (双字)G13066 (双字)G13068 (双字) 8G13070G13073G13074 (双字)G13076 (双字)G13078 (双字) 9G13080G13083G13084 (双字)G13086 (双字)G13088 (双字) 10G13090G13093G13094 (双字)G13096 (双字)G13098 (双字)轴八启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G500011G13100G13103G13104 (双字)G13106 (双字)G13108 (双字) 12G13110G13113G13114 (双字)G13116 (双字)G13118 (双字) 13G13120G13123G13124 (双字)G13126 (双字)G13128 (双字) 14G13130G13133G13134 (双字)G13136 (双字)G13138 (双字) 15G13140G13143G13144 (双字)G13146 (双字)G13148 (双字) 16G13150G13153G13154 (双字)G13156 (双字)G13158 (双字) 17G13160G13163G13164 (双字)G13166 (双字)G13168 (双字) 18G13170G13173G13174 (双字)G13176 (双字)G13178 (双字) 19G13180G13183G13184 (双字)G13186 (双字)G13188 (双字) 20G13190G13193G13194 (双字)G13196 (双字)G13198 (双字)轴九启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G51001G14000G14003G14004 (双字)G14006 (双字)G14008 (双字) 2G14010G14013G14014 (双字)G14016 (双字)G14018 (双字) 3G14020G14023G14024 (双字)G14026 (双字)G14028 (双字) 4G14030G14033G14034 (双字)G14036 (双字)G14038 (双字) 5G14040G14043G14044 (双字)G14046 (双字)G14048 (双字) 6G14050G14053G14054 (双字)G14056 (双字)G14058 (双字) 7G14060G14063G14064 (双字)G14066 (双字)G14068 (双字) 8G14070G14073G14074 (双字)G14076 (双字)G14078 (双字) 9G14080G14083G14084 (双字)G14086 (双字)G14088 (双字) 10G14090G14093G14094 (双字)G14096 (双字)G14098 (双字)轴九启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G510011G14100G14103G14104 (双字)G14106 (双字)G14108 (双字) 12G14110G14113G14114 (双字)G14116 (双字)G14118 (双字) 13G14120G14123G14124 (双字)G14126 (双字)G14128 (双字) 14G14130G14133G14134 (双字)G14136 (双字)G14138 (双字) 15G14140G14143G14144 (双字)G14146 (双字)G14148 (双字) 16G14150G14153G14154 (双字)G14156 (双字)G14158 (双字) 17G14160G14163G14164 (双字)G14166 (双字)G14168 (双字) 18G14170G14173G14174 (双字)G14176 (双字)G14178 (双字) 19G14180G14183G14184 (双字)G14186 (双字)G14188 (双字) 20G14190G14193G14194 (双字)G14196 (双字)G14198 (双字)轴十启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G52001G15000G15003G15004 (双字)G15006 (双字)G15008 (双字) 2G15010G15013G15014 (双字)G15016 (双字)G15018 (双字) 3G15020G15023G15024 (双字)G15026 (双字)G15028 (双字) 4G15030G15033G15034 (双字)G15036 (双字)G15038 (双字) 5G15040G15043G15044 (双字)G15046 (双字)G15048 (双字) 6G15050G15053G15054 (双字)G15056 (双字)G15058 (双字) 7G15060G15063G15064 (双字)G15066 (双字)G15068 (双字) 8G15070G15073G15074 (双字)G15076 (双字)G15078 (双字) 9G15080G15083G15084 (双字)G15086 (双字)G15088 (双字) 10G15090G15093G15094 (双字)G15096 (双字)G15098 (双字)轴十启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G520011G15100G15103G15104 (双字)G15106 (双字)G15108 (双字) 12G15110G15113G15114 (双字)G15116 (双字)G15118 (双字) 13G15120G15123G15124 (双字)G15126 (双字)G15128 (双字) 14G15130G15133G15134 (双字)G15136 (双字)G15138 (双字) 15G15140G15143G15144 (双字)G15146 (双字)G15148 (双字) 16G15150G15153G15154 (双字)G15156 (双字)G15158 (双字) 17G15160G15163G15164 (双字)G15166 (双字)G15168 (双字) 18G15170G15173G15174 (双字)G15176 (双字)G15178 (双字) 19G15180G15183G15184 (双字)G15186 (双字)G15188 (双字) 20G15190G15193G15194 (双字)G15196 (双字)G15198 (双字)轴十一启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G53001G16000G16003G16004 (双字)G16006 (双字)G16008 (双字) 2G16010G16013G16014 (双字)G16016 (双字)G16018 (双字) 3G16020G16023G16024 (双字)G16026 (双字)G16028 (双字) 4G16030G16033G16034 (双字)G16036 (双字)G16038 (双字) 5G16040G16043G16044 (双字)G16046 (双字)G16048 (双字) 6G16050G16053G16054 (双字)G16056 (双字)G16058 (双字) 7G16060G16063G16064 (双字)G16066 (双字)G16068 (双字) 8G16070G16073G16074 (双字)G16076 (双字)G16078 (双字) 9G16080G16083G16084 (双字)G16086 (双字)G16088 (双字) 10G16090G16093G16094 (双字)G16096 (双字)G16098 (双字)轴十一启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G530011G16100G16103G16104 (双字)G16106 (双字)G16108 (双字) 12G16110G16113G16114 (双字)G16116 (双字)G16118 (双字) 13G16120G16123G16124 (双字)G16126 (双字)G16128 (双字) 14G16130G16133G16134 (双字)G16136 (双字)G16138 (双字) 15G16140G16143G16144 (双字)G16146 (双字)G16148 (双字) 16G16150G16153G16154 (双字)G16156 (双字)G16158 (双字) 17G16160G16163G16164 (双字)G16166 (双字)G16168 (双字) 18G16170G16173G16174 (双字)G16176 (双字)G16178 (双字) 19G16180G16183G16184 (双字)G16186 (双字)G16188 (双字) 20G16190G16193G16194 (双字)G16196 (双字)G16198 (双字)轴十二启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G54001G17000G17003G17004 (双字)G17006 (双字)G17008 (双字) 2G17010G17013G17014 (双字)G17016 (双字)G17018 (双字) 3G17020G17023G17024 (双字)G17026 (双字)G17028 (双字) 4G17030G17033G17034 (双字)G17036 (双字)G17038 (双字) 5G17040G17043G17044 (双字)G17046 (双字)G17048 (双字) 6G17050G17053G17054 (双字)G17056 (双字)G17058 (双字) 7G17060G17063G17064 (双字)G17066 (双字)G17068 (双字) 8G17070G17073G17074 (双字)G17076 (双字)G17078 (双字) 9G17080G17083G17084 (双字)G17086 (双字)G17088 (双字) 10G17090G17093G17094 (双字)G17096 (双字)G17098 (双字)轴十二启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G540011G17100G17103G17104 (双字)G17106 (双字)G17108 (双字) 12G17110G17113G17114 (双字)G17116 (双字)G17118 (双字) 13G17120G17123G17124 (双字)G17126 (双字)G17128 (双字) 14G17130G17133G17134 (双字)G17136 (双字)G17138 (双字) 15G17140G17143G17144 (双字)G17146 (双字)G17148 (双字) 16G17150G17153G17154 (双字)G17156 (双字)G17158 (双字) 17G17160G17163G17164 (双字)G17166 (双字)G17168 (双字) 18G17170G17173G17174 (双字)G17176 (双字)G17178 (双字) 19G17180G17183G17184 (双字)G17186 (双字)G17188 (双字) 20G17190G17193G17194 (双字)G17196 (双字)G17198 (双字)轴十三启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G55001G18000G18003G18004 (双字)G18006 (双字)G18008 (双字) 2G18010G18013G18014 (双字)G18016 (双字)G18018 (双字) 3G18020G18023G18024 (双字)G18026 (双字)G18028 (双字) 4G18030G18033G18034 (双字)G18036 (双字)G18038 (双字) 5G18040G18043G18044 (双字)G18046 (双字)G18048 (双字) 6G18050G18053G18054 (双字)G18056 (双字)G18058 (双字) 7G18060G18063G18064 (双字)G18066 (双字)G18068 (双字) 8G18070G18073G18074 (双字)G18076 (双字)G18078 (双字) 9G18080G18083G18084 (双字)G18086 (双字)G18088 (双字) 10G18090G18093G18094 (双字)G18096 (双字)G18098 (双字)轴十三启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G550011G18100G18103G18104 (双字)G18106 (双字)G18108 (双字) 12G18110G18113G18114 (双字)G18116 (双字)G18118 (双字) 13G18120G18123G18124 (双字)G18126 (双字)G18128 (双字) 14G18130G18133G18134 (双字)G18136 (双字)G18138 (双字) 15G18140G18143G18144 (双字)G18146 (双字)G18148 (双字) 16G18150G18153G18154 (双字)G18156 (双字)G18158 (双字) 17G18160G18163G18164 (双字)G18166 (双字)G18168 (双字) 18G18170G18173G18174 (双字)G18176 (双字)G18178 (双字) 19G18180G18183G18184 (双字)G18186 (双字)G18188 (双字) 20G18190G18193G18194 (双字)G18196 (双字)G18198 (双字)轴十四启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G56001G19000G19003G19004 (双字)G19006 (双字)G19008 (双字) 2G19010G19013G19014 (双字)G19016 (双字)G19018 (双字) 3G19020G19023G19024 (双字)G19026 (双字)G19028 (双字) 4G19030G19033G19034 (双字)G19036 (双字)G19038 (双字) 5G19040G19043G19044 (双字)G19046 (双字)G19048 (双字) 6G19050G19053G19054 (双字)G19056 (双字)G19058 (双字) 7G19060G19063G19064 (双字)G19066 (双字)G19068 (双字) 8G19070G19073G19074 (双字)G19076 (双字)G19078 (双字) 9G19080G19083G19084 (双字)G19086 (双字)G19088 (双字) 10G19090G19093G19094 (双字)G19096 (双字)G19098 (双字)轴十四启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G560011G19100G19103G19104 (双字)G19106 (双字)G19108 (双字) 12G19110G19113G19114 (双字)G19116 (双字)G19118 (双字) 13G19120G19123G19124 (双字)G19126 (双字)G19128 (双字) 14G19130G19133G19134 (双字)G19136 (双字)G19138 (双字) 15G19140G19143G19144 (双字)G19146 (双字)G19148 (双字) 16G19150G19153G19154 (双字)G19156 (双字)G19158 (双字) 17G19160G19163G19164 (双字)G19166 (双字)G19168 (双字) 18G19170G19173G19174 (双字)G19176 (双字)G19178 (双字) 19G19180G19183G19184 (双字)G19186 (双字)G19188 (双字) 20G19190G19193G19194 (双字)G19196 (双字)G19198 (双字)轴十五启动编号定位编号运行模式控制方法加速时间减速时间插补对象指令速度定位地址圆弧地址G57001G20000G20003G20004 (双字)G20006 (双字)G20008 (双字) 2G20010G20013G20014 (双字)G20016 (双字)G20018 (双字) 3G20020G20023G20024 (双字)G20026 (双字)G20028 (双字) 4G20030G20033G20034 (双字)G20036 (双字)G20038 (双字) 5G20040G20043G20044 (双字)G20046 (双字)G20048 (双字) 6G20050G20053G20054 (双字)G20056 (双字)G20058 (双字) 7G20060G20063G20064 (双字)G20066 (双字)G20068 (双字) 8G20070G20073G20074 (双字)G20076 (双字)G20078 (双字) 9G20080G20083G20084 (双字)G20086 (双字)G20088 (双字) 10G20090G20093G20094 (双字)G20096 (双字)G20098 (双字)。
伺服电机调试步骤及操作规程

伺服电机调试步骤及操作规程伺服电机调试步骤伺服电机可使掌控速度,位置精度特别精准,可以将电压信号转化为转矩和转速以驱动掌控对象。
伺服电机转子转速受输入信号掌控,并能快速反应,在自动掌控系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其紧要特点是,当信号电压为零时无自转现象,转速随着转矩的加添而匀速下降。
以下是关于其调试的步骤说明:1、初始化参数在接线之前,先初始化参数。
在掌控卡上:选好掌控方式;将PID参数清零;让掌控卡上电时默认使能信号关闭;将此状态保存,确保掌控卡再次上电时即为此状态。
在伺服电机上:设置掌控方式;设置使能由外部掌控;编码器信号输出的齿轮比;设置掌控信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的掌控电压。
比如,山洋是设置1V电压对应的转速,出厂值为500,假如你只准备让电机在1000转以下工作,那么,将这个参数设置为111、2、接线将掌控卡断电,连接掌控卡与伺服之间的信号线。
以下的线是必需要接的:掌控卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和掌控卡(以及PC)上电。
此时电机应当不动,而且可以用外力轻松转动,假如不是这样,检查使能信号的设置与接线。
用外力转动电机,检查掌控卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环掌控系统,假如反馈信号的方向不正确,后果确定是祸害性的。
通过掌控卡打开伺服的使能信号。
这是伺服应当以一个较低的速度转动,这就是传说中的“零漂”。
一般掌控卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)掌控。
假如不能掌控,检查模拟量接线及掌控方式的参数设置。
确认给出正数,电机正转,编码器计数加添;给出负数,电机反转转,编码器计数减小。
技术说明资料伺服调整参数的说明

技术说明资料伺服调整参数的说明(总4页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--技术说明资料伺服调整参数的说明JRAT: 负荷惯性比 ,请设定为以下的算出值 JRAT1= 马达轴换算的负荷惯量( JL) ×100% 伺服马达的惯量(JM)KVP: 速度环比例增益此值设定得越高则应答性越好. 将它设定在装置的机械系统不振动,不共振的程度. 若 JRAT已正确设定,KVP设定的值就成为速度环的应答带TVI: 速度环积分时间常数因为此积分时间常数是对伺服系统延迟的要素,积分时间常数设定大时,应答性变差,定位时间延长.相反,此积分时间常数过小时,伺服系统变得不稳定,装置的机械系统振动或共振. 请将积分时间常数设定到装置的机械系统不振动或共振的程度. 伺服系统稳定的TVI目标值应确保在速度环应答带的1/4以下 TVI【ms】=1/ (KVP【Hz】/ 4 ×2π)为可以设定的最小目标值KP: 位置环比例增益位置环增益增加时,应答性提高,稳定时间减短. 但是,在装置的机械系统的刚性较低时,机械将发生振动及共振. 想把位置环增益设定高时,应充分考虑装置的机械系统的刚性,提高系统的固有振动数, 伺服系统稳定的KP(Hz)目标值应确保在速度环应答带的1/4以下 KP【1/s】=KVP/ 4×2π为可以设定的最大目标值TCFIL: 转矩指令滤波器通过对速度环内转矩指令的1次低通滤波器的剪切频率的设定,可以有抑制共振,振动,异音的效果. 因为此转矩指令滤波器是对伺服系统延迟的要素,设定过大时应答性将恶化VCFIL: 速度指令滤波器通过对速度环内速度指令的1次低通滤波器的剪切频率的设定,可以有抑制振动的效果. 在速度控制式或位置控制式全闭环控制时设定有效果. 因为此速度指令滤波器是对伺服系统延迟的要素,设定过大时应答性将恶化PCFIL: 位置指令滤波器通过对位置环内位置指令的1次低通滤波器的剪切频率的设定,可以有抑制共振,振动,异音的效果. 因为此位置指令滤波器是对伺服系统延迟的要素,设定过大时应答性将恶化FFGN: 前馈增益减小位置偏差,位置环的应答加快. 希望将稳定时间提早时有效,但在位置环比例增益已设定较大时的装置上无效. 在观测定位结束信号.速度监测的同时进行设定,使定位结束信号不被分割,速度监测信号不发生超时.FFFIL: 前馈滤波器可设定前馈时的1次低通滤波器的剪切频率. 发生了定位结束信号被分割及速度监测时产生超时的情况下,通过此设定可以进行抑制TCNFILA/B: 转矩指令陷波滤波器对装置的机械系统的共振频率设置转矩指令陷波滤波器后,可以抑制装置机械系统的共振,异音. 通过对TCNFILA TCNFILBA 的并用,可以形成2段陷波滤波器. 利用自动调整陷波滤波器功能,TCNFILA 可以被自动设定大部分交流伺服系统位置环均采用比例调节器,因为积分调节虽然可以减小系统的静差,但是会产生位置超调,在需要高跟随性能的系统中,可以增加位置前馈增益参数。
QD77缓冲区参数表
控制数据区
返回一览
系统控制数据 Cd.□ Cd.1 Cd.2 Cd.41 Cd.42 Cd.137 项目 Flash ROM写入请求 参数的初始化请求 减速开始标志有效 减速停止时停止指令处理选择 无放大器运行模式切换请求 QD77MS2 Un\G1900 Un\G1901 Un\G1905 Un\G1907 Un\G1926 Un\G1928 Un\G1909 Un\G1932 缓冲存储器地址Un\G■ QD77MS4 QD77MS16 Un\G1900 Un\G5900 Un\G1901 Un\G5901 Un\G1905 Un\G5905 Un\G1907 Un\G5907 Un\G1926 Un\G5926 Un\G5928 Un\G5929 Un\G1928 Un\G5930 Un\G5931 Un\G1909 Un\G5909 Un\G1932 Un\G5932 QD77GF16 Un\G5900 Un\G5901 Un\G5905 Un\G5907 Un\G5928 Un\G5929 Un\G5930 Un\G5931 轴号 项目 定位启动编号 定位启动点编号 轴错误复位 重新启动指令 M代码OFF请求 外部指令有效 当前值更改值 QD77MS2 Un\G1500 Un\G1501 Un\G1502 Un\G1503 Un\G1504 Un\G1505 Un\G1506 Un\G1507 Un\G1508 Un\G1509 Un\G1510 Un\G1511 Un\G1512 Un\G1513 Un\G1514 Un\G1515 Un\G1516 Un\G1517 Un\G1518 Un\G1519 Un\G1520 Un\G1521 Un\G1522 Un\G1523 Un\G1524 Un\G1525 Un\G1526 Un\G1527 Un\G1528 Un\G1530 Un\G1531 Un\G1532 Un\G1534 Un\G1535 Un\G1536 Un\G1537 Un\G1538 Un\G1540 Un\G1541 Un\G1542 Un\G1543 Un\G1544 Un\G1545 Un\G1546 Un\G1547 Un\G1548 Un\G1549 缓冲存储器地址Un\G■ QD77MS4 QD77MS16 Un\G1500 Un\G4300 Un\G1501 Un\G4301 Un\G1502 Un\G4302 Un\G1503 Un\G4303 Un\G1504 Un\G4304 Un\G1505 Un\G4305 Un\G1506 Un\G4306 Un\G1507 Un\G4307 Un\G1508 Un\G4308 Un\G1509 Un\G4309 Un\G1510 Un\G4310 Un\G1511 Un\G4311 Un\G1512 Un\G4312 Un\G1513 Un\G4313 Un\G1514 Un\G4314 Un\G1515 Un\G4315 Un\G1516 Un\G4316 Un\G1517 Un\G4317 Un\G1518 Un\G4318 Un\G1519 Un\G4319 Un\G1520 Un\G4320 Un\G1521 Un\G4321 Un\G1522 Un\G4322 Un\G1523 Un\G4323 Un\G1524 Un\G4324 Un\G1525 Un\G4325 Un\G1526 Un\G4326 Un\G1527 Un\G4327 Un\G1528 Un\G4328 Un\G1530 Un\G4330 Un\G1531 Un\G4331 Un\G1532 Un\G4332 Un\G1534 Un\G4334 Un\G1535 Un\G4335 Un\G1536 Un\G4336 Un\G1537 Un\G4337 Un\G1538 Un\G4338 Un\G4339 Un\G1540 Un\G4340 Un\G1541 Un\G4341 Un\G1542 Un\G4342 Un\G1543 Un\G4343 Un\G1544 Un\G4344 Un\G1545 Un\G4345 Un\G1546 Un\G4346 Un\G1547 Un\G4347 Un\G1548 Un\G4348 Un\G1549 Un\G4349 QD77GF16 Un\G4300 Un\G4301 Un\G4302 Un\G4303 Un\G4304 Un\G4305 Un\G4306 Un\G4307 Un\G4308 Un\G4309 Un\G4310 Un\G4311 Un\G4312 Un\G4313 Un\G4314 Un\G4315 Un\G4316 Un\G4317 Un\G4318 Un\G4319 Un\G4320 Un\G4321 Un\G4322 Un\G4323 Un\G4324 Un\G4325 Un\G4326 Un\G4327 Un\G4328 Un\G4330 Un\G4331 Un\G4332 Un\G4334 Un\G4335 Un\G4336 Un\G4337 Un\G4338 Un\G4339 Un\G4340 Un\G4341 Un\G4342 Un\G4343 Un\G4344 Un\G4345 Un\G4346 Un\G4347 Un\G4348 Un\G4349
伺服电机参数设置
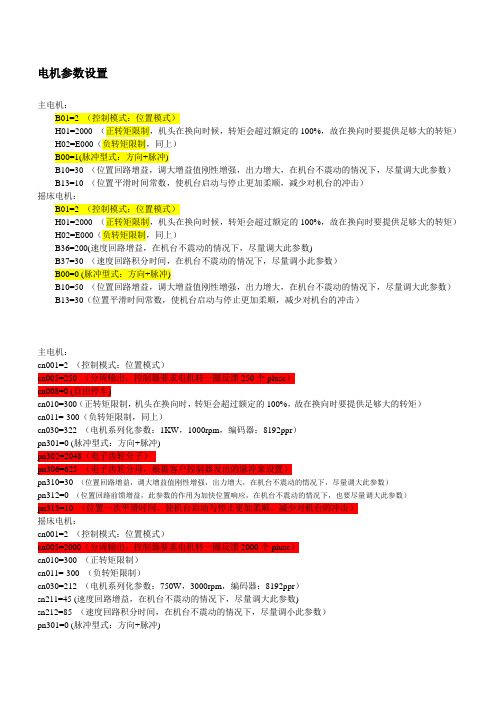
电机参数设置主电机:B01=2 (控制模式:位置模式)H01=2000 (正转矩限制,机头在换向时候,转矩会超过额定的100%,故在换向时要提供足够大的转矩)H02=E000(负转矩限制,同上)B00=1(脉冲型式:方向+脉冲)B10=30 (位置回路增益,调大增益值刚性增强,出力增大,在机台不震动的情况下,尽量调大此参数)B13=10 (位置平滑时间常数,使机台启动与停止更加柔顺,减少对机台的冲击)摇床电机:B01=2 (控制模式:位置模式)H01=2000 (正转矩限制,机头在换向时候,转矩会超过额定的100%,故在换向时要提供足够大的转矩)H02=E000(负转矩限制,同上)B36=200(速度回路增益,在机台不震动的情况下,尽量调大此参数)B37=30 (速度回路积分时间,在机台不震动的情况下,尽量调小此参数)B00=0 (脉冲型式:方向+脉冲)B10=50 (位置回路增益,调大增益值刚性增强,出力增大,在机台不震动的情况下,尽量调大此参数)B13=30(位置平滑时间常数,使机台启动与停止更加柔顺,减少对机台的冲击)主电机:cn001=2 (控制模式:位置模式)cn005=250 (分周输出:控制器要求电机转一圈反馈250个pluse)cn008=0 (自由停车)cn010=300(正转矩限制,机头在换向时,转矩会超过额定的100%,故在换向时要提供足够大的转矩)cn011=-300(负转矩限制,同上)cn030=322 (电机系列化参数:1KW,1000rpm,编码器:8192ppr)pn301=0 (脉冲型式:方向+脉冲)pn302=2048(电子齿轮分子)pn306=625 (电子齿轮分母,根据客户控制器发出的脉冲来设置)pn310=30 (位置回路增益,调大增益值刚性增强,出力增大,在机台不震动的情况下,尽量调大此参数)pn312=0 (位置回路前馈增益,此参数的作用为加快位置响应,在机台不震动的情况下,也要尽量调大此参数)pn313=10 (位置一次平滑时间,使机台启动与停止更加柔顺,减少对机台的冲击)摇床电机:cn001=2 (控制模式:位置模式)cn005=2000(分周输出:控制器要求电机转一圈反馈2000个pluse)cn010=300 (正转矩限制)cn011=-300 (负转矩限制)cn030=212 (电机系列化参数:750W,3000rpm,编码器:8192ppr)sn211=45 (速度回路增益,在机台不震动的情况下,尽量调大此参数)sn212=85 (速度回路积分时间,在机台不震动的情况下,尽量调小此参数)pn301=0 (脉冲型式:方向+脉冲)pn302=8192(电子齿轮分子)pn306=2500(电子齿轮分母,根据客户控制器发出的脉冲来设置)pn310=70 (位置回路增益,调大增益值刚性增强,出力增大,在机台不震动的情况下,尽量调大此参数)pn313=45 (位置一次平滑时间,使机台启动与停止更加柔顺,减少对机台的冲击)主电机:PA4=0(控制方式选择,0:位置控制);PA9=19(电机型号选择,不同电机此参数不一样,);PA11=1500(位置环增益,范围500—8000);PA14=1000(速度环增益,范围500——8000);PA15=2000(速度环积分时间常数,范围500——6000);PA17=8000(速度给定滤波时间常数);P25=10(编码器输出分频系数,设置电机编码器反馈输出脉冲的分频系数)P26=0/1(脉冲输出逻辑取反);P27=0/1(脉冲输入逻辑取反,可用于改变电机方向);P31=1(输入指令脉冲倍频分子);P32=1(输入指令脉冲倍频分母);PA38=1000(电流环增益,范围500——8000);P63=1(0:减速停车,1:惯性停车);摇床电机:P4=0(控制方式选择,0:位置控制);P9=5(电机型号选择,不同电机此参数不一样,5:代表750W电机);P27=0/1(脉冲输入逻辑取反,可用于改变电机方向);P31=625(输入指令脉冲倍频分子);P32=16(输入指令脉冲倍频分母);。