匈牙利算法(bfs)
运筹学匈牙利法

运筹学匈牙利法运筹学匈牙利法(Hungarian Algorithm),也叫匈牙利算法,是解决二部图最大(小)权完美匹配(也称作二分图最大权匹配、二分图最小点覆盖)问题的经典算法,是由匈牙利数学家Kuhn和Harold W. Kuhn发明的,属于贪心算法的一种。
问题描述在一个二分图中,每个节点分别属于两个特定集合。
找到一种匹配,使得所有内部的节点对都有连边,并且找到一种匹配方案,使得该方案的边权和最大。
应用场景匈牙利算法的应用场景较为广泛,比如在生产调度、货车调度、学生对导师的指定、电影的推荐等领域内,都有广泛的应用。
算法流程匈牙利算法的伪代码描述如下:进行循环ɑ、选择一点未匹配的点a作为起点,它在二分图的左边β、找出a所有未匹配的点作为下一层节点ɣ、对下一层的每个节点,如果它在右边未匹配,直接匹配ɛ、如果遇到一个已经匹配的节点,进入下一圈,考虑和它匹配的情况δ、对已经匹配的点,将它已经匹配的点拿出来,作为下一层节点,标记这个点作为已被搜索过ε、将这个点作为当前层的虚拟点,没人配它,看能否为它找到和它匹配的点ζ、如果能匹配到它的伴侣,令它们成对被匹配最后输出最大权匹配。
算法优缺点优点:相比于暴力求解二分图最大权匹配来说,匈牙利算法具有优秀的解决效率和高效的时间复杂度,可以在多项式时间(O(n^3))内解决二分图最大权匹配问题。
缺点:当二分图较大时,匈牙利算法还是有很大的计算复杂度,复杂度不佳,算法有效性差。
此时就需要改进算法或者使用其他算法。
总结匈牙利算法是一个常见的解决二分图最大权匹配问题的算法,由于其简洁、易用、效率优秀等特性,广泛应用于学术和实际问题中。
匈牙利算法虽然在处理较大规模问题时效率不佳,但仍然是一种值得掌握的经典算法。
匈牙利算法步骤和公式
匈牙利算法是一种求解指派问题的算法,其步骤如下:对指派问题的系数矩阵进行变换,使每行每列至少有一个元素为“0”。
具体做法是让系数矩阵的每行元素去减去该行的最小元素,再让系数矩阵的每列元素减去该列的最小元素。
从第一行开始,若该行只有一个零元素,就对这个零元素加括号,对加括号的零元素所在的列画一条线覆盖该列。
若该行没有零元素或者有两个以上零元素(已划去的不算在内),则转下一行,依次进行到最后一行。
从第一列开始,若该列只有一个零元素。
就对这个零元素加括号(同样不、考虑已划去的零元素)。
再对加括号的零元素所在行画一条直线覆盖该列。
若该列没有零元素或有两个以上零元素,则转下一列,依次进行到最后一列为止。
重复上述步骤(1)和(2)可能出现3种情况:(5)按定理进行如下变换:①从矩阵未被直线覆盖的数字中找出一个最小的k;②当矩阵中的第i行有直线覆盖时,令;无直线覆盖时。
二分图匹配(匈牙利算法)
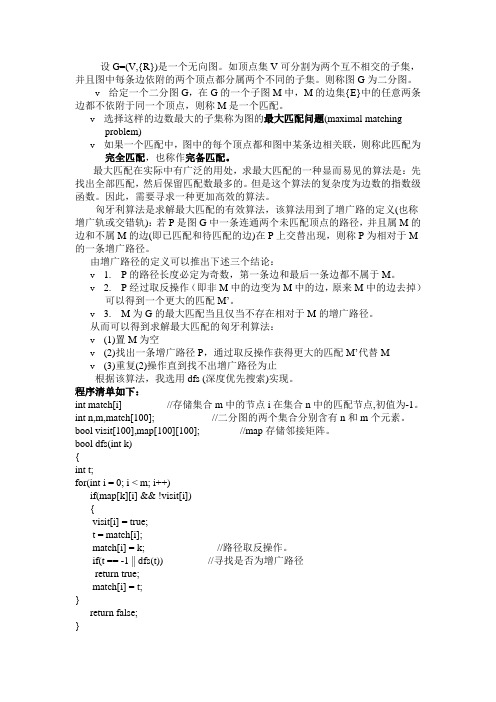
设G=(V,{R})是一个无向图。
如顶点集V可分割为两个互不相交的子集,并且图中每条边依附的两个顶点都分属两个不同的子集。
则称图G为二分图。
v给定一个二分图G,在G的一个子图M中,M的边集{E}中的任意两条边都不依附于同一个顶点,则称M是一个匹配。
v选择这样的边数最大的子集称为图的最大匹配问题(maximal matching problem)v如果一个匹配中,图中的每个顶点都和图中某条边相关联,则称此匹配为完全匹配,也称作完备匹配。
最大匹配在实际中有广泛的用处,求最大匹配的一种显而易见的算法是:先找出全部匹配,然后保留匹配数最多的。
但是这个算法的复杂度为边数的指数级函数。
因此,需要寻求一种更加高效的算法。
匈牙利算法是求解最大匹配的有效算法,该算法用到了增广路的定义(也称增广轨或交错轨):若P是图G中一条连通两个未匹配顶点的路径,并且属M的边和不属M的边(即已匹配和待匹配的边)在P上交替出现,则称P为相对于M 的一条增广路径。
由增广路径的定义可以推出下述三个结论:v 1. P的路径长度必定为奇数,第一条边和最后一条边都不属于M。
v 2. P经过取反操作(即非M中的边变为M中的边,原来M中的边去掉)可以得到一个更大的匹配M’。
v 3. M为G的最大匹配当且仅当不存在相对于M的增广路径。
从而可以得到求解最大匹配的匈牙利算法:v(1)置M为空v(2)找出一条增广路径P,通过取反操作获得更大的匹配M’代替Mv(3)重复(2)操作直到找不出增广路径为止根据该算法,我选用dfs (深度优先搜索)实现。
程序清单如下:int match[i] //存储集合m中的节点i在集合n中的匹配节点,初值为-1。
int n,m,match[100]; //二分图的两个集合分别含有n和m个元素。
bool visit[100],map[100][100]; //map存储邻接矩阵。
bool dfs(int k){int t;for(int i = 0; i < m; i++)if(map[k][i] && !visit[i]){visit[i] = true;t = match[i];match[i] = k; //路径取反操作。
匈牙利算法基本原理
匈牙利算法(Hungarian algorithm),也称为Kuhn-Munkres算法,是用于解决最大权匹配问题的一种经典算法。
它的基本原理是通过逐步改进当前匹配来寻找最优匹配。
以下是匈牙利算法的基本原理:
1. 初始化:将每个顶点的匹配状态设置为未匹配。
创建一个大小为n×n的矩阵,其中n是顶点数目。
矩阵表示图中边的权重。
2. 第一阶段:对于每个未匹配的顶点,尝试为其寻找匹配。
从该顶点开始进行深度优先搜索(DFS)或广度优先搜索(BFS)来寻找增广路径。
- 如果找到了增广路径,将路径上的顶点的匹配状态进行交替,即从未匹配转为匹配,从匹配转为未匹配。
这样可以扩展当前的匹配集。
- 如果没有找到增广路径,则转到第二阶段。
3. 第二阶段:为了找到最优匹配,需要修改图中的权重,使得原问题转化为一个完美匹配的问题。
具体步骤如下:
- 从所有未匹配的顶点中找到最小权重的边,并将该权重减去其他边的权重。
- 对于所有已匹配的顶点,将其权重加上其他边的权重。
- 重新回到第一阶段,继续寻找增广路径。
4. 重复执行第一阶段和第二阶段,直到无法找到更多的增广路径。
此时,得到了最优匹配。
匈牙利算法的时间复杂度为O(n^3),其中n是顶点数目。
它在解决二分图最大权匹配问题上表现出色,并被广泛应用于实际问题,如任务分配、资源调度等领域。
图的匹配与覆盖问题

图的匹配与覆盖问题图的匹配与覆盖问题是图论中的重要研究领域,涉及到在给定的图中找到特定的图形结构或边的选择,以满足特定的条件或要求。
本文将探讨图的匹配与覆盖问题的基本概念、算法和应用。
一、图的基本概念图由节点和边组成,表示对象之间的关系。
在图的匹配与覆盖问题中,我们主要关注两种图形结构:匹配和覆盖。
1. 匹配图的匹配是指在给定的图中选择一些边,使得这些边两两不相邻。
换句话说,匹配是图中没有共享节点的边的集合。
2. 覆盖图的覆盖是指选择一些节点,使得图中的每条边至少与其中一个选定的节点相邻。
简单来说,覆盖是指包含所有边的节点集合。
二、图的匹配与覆盖问题的算法图的匹配与覆盖问题可以通过不同的算法来求解。
以下是几种常见的算法:1. 匈牙利算法匈牙利算法是解决二分图最大匹配问题的经典算法之一。
它基于增广路径的思想,通过不断寻找增广路径来增加匹配数,直到无法找到增广路径为止。
2. KM算法KM算法是解决带权二分图最佳匹配问题的经典算法。
它通过建立一个交错树和一个势函数来寻找最佳匹配,不断进行增广和修改势函数的操作,直到找到最佳匹配。
3. Hopcroft-Karp算法Hopcroft-Karp算法是解决二分图最大匹配问题的改进算法,相比于匈牙利算法具有更好的时间复杂度。
它通过构建一个图的层次结构,不断使用BFS搜索增广路径来增加匹配数。
三、图的匹配与覆盖问题的应用图的匹配与覆盖问题在实际应用中有广泛的应用,其中一些重要的应用领域包括:1. 组合优化图的匹配与覆盖问题可以用于解决组合优化问题,例如任务分配、资源调度等。
通过合理选择节点和边的匹配关系或覆盖关系,可以优化系统的整体性能。
2. 电子设计自动化在电子设计中,图的匹配与覆盖问题可以应用于布线、逻辑合成等方面。
通过匹配或覆盖边或节点,可以满足电路连接的要求,提高电路设计的效率和性能。
3. 社交网络分析图的匹配与覆盖问题在社交网络分析中也起到重要的作用。
指派问题匈牙利算法最大值
指派问题匈牙利算法最大值
匈牙利算法(匈牙利算法,也被称为“插入-删除算法”或“排序算法”)是一种整数排序算法,在指派问题中可以将一个整数数组按照一定规则排序,使得所有指派中最大的元素出现的位置都不相同。
以下是匈牙利算法在解决指派问题的最大值问题的步骤:
1. 将数组分为两个部分,左半部分尽可能地小,右半部分尽可能地大。
2. 从右半部分开始,将一个元素与它的指派对象的最大值进行
比较。
如果两个元素之间的指派关系不符合要求,就将它们交换位置。
3. 接下来,从左边半部分开始,将一个元素与它的指派对象的最大值进行比较。
如果两个元素之间的指派关系不符合要求,就将它们交换位置。
4. 重复步骤2和步骤3,直到左半部分的最大值与右半部分的最大值相等。
5. 在最右半部分找到最大的元素,将它与左半部分的最大值交换。
6. 重复步骤1到步骤5,直到数组中的所有元素都被排序。
匈牙利算法的时间复杂度为O(nlogn),其中n为数组的长度。
在实际应用中,该算法通常用于小规模数据的排序,对于大规模数据的
排序则需要使用更高效的算法。
munkres函数

Munkres算法,也称为匈牙利算法,是一种用于解决二分图最大匹配问题的线性时间复杂度算法。
二分图最大匹配问题是在一个二分图中寻找最大的匹配,即找到最大的子集,使得图中的每条边都有一个与之匹配的顶点。
Munkres算法的基本思想是通过在原图中构造增广路径,并在增广路径上不断进行增广操作,最终得到最大匹配。
具体步骤如下:
1. 初始化:将所有未匹配的点标记为0,已匹配的点标记为无穷大。
2. 寻找增广路径:从任意一个未匹配的点开始,进行DFS或BFS 等搜索方法,直到找到一个增广路径。
增广路径是指从起点开始,沿着一条路径可以一直匹配到终点,但终点尚未匹配。
3. 进行增广操作:在增广路径上,将路径上的所有点与对应的未匹配点进行匹配,并将这些点标记为已匹配。
4. 重复步骤2和3,直到所有的点都已匹配或者找不到增广路径为止。
Munkres算法的时间复杂度为O(V^3),其中V是顶点的数量。
这是因为在最坏的情况下,需要枚举所有可能的增广路径,而每条增广路径最多包含V个顶点。
因此,Munkres算法是一种非常高效的算法,被广泛应用于解决二分图最大匹配问题。
匈牙利算法详解

匈牙利算法详解
匈牙利算法是一种解决二分图最大匹配问题的经典算法,也叫做增广路算法。
它的基本思想是从左侧一端开始,依次匹配左侧点,直到无法添加匹配为止。
在匹配过程中,每次都通过BFS 寻找增广路径,即可以让已有的匹配变得更优或添加新的匹配。
增广路的长度必须为奇数,因为必须从未匹配的左侧点开始,交替经过已匹配的右侧点和未匹配的左侧点,最后再到达未匹配的右侧点。
当没有找到增广路径时,匹配结束。
匈牙利算法的具体实现可以使用DFS 或BFS,这里以BFS 为例。
算法步骤如下:
1. 从左侧一个未匹配的点开始,依次找增广路径。
如果找到,就将路径上的匹配状态翻转(即已匹配变未匹配,未匹配变已匹配),并继续找增广路径;如果找不到,就说明已经完成匹配。
2. 使用BFS 寻找增广路径。
从左侧的某个未匹配点开始,依次搜索路径中未匹配的右侧点。
如果找到右侧未匹配点,则说明找到了增广路径;否则,将已搜过的左侧点打上标记,以免重复搜索。
如果找到增广路径,就将路径的左侧和右侧点的匹配状态翻转。
3. 重复步骤1 和2,直到找不到增广路径为止。
匈牙利算法的时间复杂度为O(VE),其中V 和E 分别为二分图中的左侧点数和右侧点数。
实际运行效率很高,可以处理百万级别的数据。
匈牙利法求最优解步骤

匈牙利法求最优解步骤匈牙利法是一种用于求解二分图最大匹配问题的算法,其基本思想是通过交替路径的方法不断增大匹配的数量,直到无法找到更多的交替路径为止。
以下将详细介绍匈牙利法的步骤:1.建立二分图:首先,将给定的问题转化为二分图的形式。
二分图由两个不相交的点集U和V组成,边连接U中的点和V中的点。
其中,U中的点表示左侧的元素,V中的点表示右侧的元素。
2. 初始化匹配:开始时,所有的边都没有匹配,称为未配对边。
可以用一个数组match[]来表示,match[u]表示与点u匹配的点。
将match数组初始化为-1,表示没有匹配。
3.查找增广路:对于U中的每个未配对点u,从点u出发,尝试找到一条路径,路径的边交替进入和离开匹配数,直到无法找到路径为止。
a) 如果点u未匹配,说明找到了一条增广路。
将路径上的边加入匹配中,并更新match数组。
b) 如果点u已匹配,需要从与之匹配的点v出发,继续寻找增广路。
这时,需要用dfs或bfs进行递归或迭代的路径查找,直到找到增广路或者无法找到为止。
4.更新匹配:通过查找增广路,可以找到一条新的增广路径,将其加入匹配中。
重复上述步骤,不断更新匹配,直到无法找到增广路径为止。
5.返回最大匹配:所有增广路径都找不到时,匹配就已经达到最大,并且无法再增加匹配数量。
此时,将匹配数返回作为最大匹配。
匈牙利法是一个比较高效的算法,其时间复杂度为O(V*E),其中V和E分别表示二分图中的点和边的数量。
需要注意的是,匈牙利法中可能存在多个不同的最大匹配,具体的匹配结果可能与初始点的顺序有关。
不同的初始点可能找到不同的增广路,从而得到不同的最大匹配。
因此,在实际应用中,可以多次运行匈牙利法,以得到不同的匹配结果,并从中选择最优解。
匈牙利算法(bfs)

匈牙利算法 by gqp1、算法原理:用找增广路的方式来解决二分图最大匹配问题。
流程大致如下。
(1)从一个点出发找增广路,直到所有点都找过。
(2)如果找到增更新路径并匹配数加1,重复(1)。
(3)如果未找到增广路则重复(1)。
这个算法很简单,就是找增广路。
所谓的增广路也就是在图中找到一条交错路(见图示,红色找过,蓝色没找过),也就是已经找过的边和未找过的边交替出现,并且开始和结尾都是没找过的。
如下图所示就是一条增广路。
我可以发现这条路一定是奇数,并且把这条路取反就可以获得一种更多匹配的方案,也就是把蓝色边取,而放弃红色边。
从实际出发就是本来是A ——C ,而现在发现D ——C 并且还有A ——B ,由于A 还可以匹配C 之外的点,而C 又可以被D 匹配,那么我们就用D 代替A ,让A 可以匹配其他点,这样显然方案变得更优。
而算法就是不断找增广路。
找到增广路就意味着我们的方案变得更优。
而当找不到方案时,一定就已经找到最优解。
我们可以这样考虑,如果没有达到最优,那么一定是有这样一种情况,有点C 已经匹配A ——C ,而这时C 还可被其他闲置点匹配且A 还可以匹配其他闲置点。
而这种情况与上图一致,我们可以发现这时一定可以找到增广路。
所以当找不到增广路时就找到了最优解。
2、算法实现,dfs 很简单,就不说了。
可以上网找代码。
不过递归总归是有缺点,于是我写了个bfs 来实现。
Dfs 实现和算法思想很一致,找到个点就增广,如果找到闲置点则找到增广路,否则看谁跟此点匹配,再继续找增广。
也就是一条路走完看是不是增广再找其他路。
而bfs 则是同时多路查找,一旦找到增广路就停止。
对于常见题目,稀疏的图,bfs 显然更好。
当然他们的复杂度差的不多,至少我跑十万点的图,时间上只差0.1以内。
不过由于栈的限制,所以还是bfs 更实用。
Bfs 的实现其实也很简单,不过要引入一个数组fa 来记录找寻的路径,因为bfs 无法回溯改路径,所以要记录每次查找的路径。
匈牙利算法原理

匈牙利算法原理
匈牙利算法是一种用于解决二分图最大匹配问题的算法。
在二分图中,将图中的节点分为两个集合,分别为左侧节点集合和右侧节点集合,且左侧节点集合中的节点与右侧节点集合中的节点之间不存在边,只有左侧节点集合中的节点与右侧节点集合中的节点之间存在边。
二分图最大匹配问题就是找到一种最优的匹配方式,使得左侧节点集合中的每个节点都与右侧节点集合中的一个节点匹配。
匈牙利算法的基本思想是:从左侧节点集合中的每个节点开始,依次寻找与其匹配的右侧节点,如果找到了一个右侧节点,就将该右侧节点与左侧节点匹配,并继续寻找下一个左侧节点的匹配。
如果找不到一个右侧节点与该左侧节点匹配,就回溯到上一个左侧节点,并尝试匹配其他右侧节点,直到找到一个能够匹配的右侧节点或者所有的右侧节点都已经尝试过。
匈牙利算法的实现过程可以分为以下几个步骤:
1. 初始化:将所有的左侧节点都标记为未匹配状态。
2. 从左侧节点集合中的每个未匹配节点开始,依次进行匹配。
3. 对于每个未匹配节点,寻找与其相连的所有右侧节点,并尝试将其与该左侧节点匹配。
4. 如果找到了一个未匹配的右侧节点,就将该右侧节点与该左侧节点匹配,并将该左侧节点标记为已匹配状态。
5. 如果找不到一个未匹配的右侧节点与该左侧节点匹配,就回溯到上一个左侧节点,并尝试匹配其他右侧节点。
6. 如果所有的左侧节点都已经匹配完成,就得到了一个最大匹配。
7. 如果还存在未匹配的左侧节点,就说明无法找到一个最大匹配。
匈牙利算法的时间复杂度为O(n^3),其中n为节点的数量。
虽然时间复杂度比较高,但是匈牙利算法在实际应用中表现良好,可以处理大规模的二分图最大匹配问题。
二分图最大匹配:匈牙利算法的python实现

⼆分图最⼤匹配:匈⽛利算法的python实现⼆分图匹配是很常见的算法问题,⼀般⽤匈⽛利算法解决⼆分图最⼤匹配问题,但是⽬前⽹上绝⼤多数都是C/C++实现版本,没有python版本,于是就⽤python实现了⼀下深度优先的匈⽛利算法,本⽂使⽤的是递归的⽅式以便于理解,然⽽迭代的⽅式会更好,各位可以⾃⾏实现。
1、⼆分图、最⼤匹配什么是⼆分图:⼆分图⼜称作⼆部图,是图论中的⼀种特殊模型。
设G=(V,E)是⼀个⽆向图,如果顶点V可分割为两个互不相交的⼦集(A,B),并且图中的每条边(i,j)所关联的两个顶点i和j分别属于这两个不同的顶点集(i in A,j in B),则称图G为⼀个⼆分图。
什么是匹配:把上图想象成3位⼯⼈和4种⼯作,连线代表⼯⼈愿意从事某项⼯作,但最终1个⼯⼈只能做⼀种⼯作,最终的配对结果连线就是⼀个匹配。
匹配可以是空。
什么是最⼤匹配:在愿意从事的基础上,能够最多配成⼏对。
现在要⽤匈⽛利算法找出最多能发展⼏对。
[color=green][size=medium]匈⽛利算法是解决寻找⼆分图最⼤匹配的。
更多⼆分图最⼤匹配的图解可以参考 /5576502/1297344以下是代码,为了图省事使⽤了类,实际上并不需要这样M=[]class DFS_hungary():def__init__(self, nx, ny, edge, cx, cy, visited):self.nx, self.ny=nx, nyself.edge = edgeself.cx, self.cy=cx,cyself.visited=visiteddef max_match(self):res=0for i in self.nx:if self.cx[i]==-1:for key in self.ny: # 将visited置0表⽰未访问过self.visited[key]=0res+=self.path(i)return resdef path(self, u):for v in self.ny:if self.edge[u][v] and (not self.visited[v]):self.visited[v]=1if self.cy[v]==-1:self.cx[u] = vself.cy[v] = uM.append((u,v))return 1else:M.remove((self.cy[v], v))if self.path(self.cy[v]):self.cx[u] = vself.cy[v] = uM.append((u, v))return 1return 0ok,接着测试⼀下:if__name__ == '__main__':nx, ny = ['A', 'B', 'C', 'D'], ['E', 'F', 'G', 'H']edge = {'A':{'E': 1, 'F': 0, 'G': 1, 'H':0}, 'B':{'E': 0, 'F': 1, 'G': 0, 'H':1}, 'C':{'E': 1, 'F': 0, 'G': 0, 'H':1}, 'D':{'E': 0, 'F': 0, 'G': 1, 'H':0}} # 1 表⽰可以匹配, 0 表⽰不能匹配cx, cy = {'A':-1,'B':-1,'C':-1,'D':-1}, {'E':-1,'F':-1,'G':-1,'H':-1}visited = {'E': 0, 'F': 0, 'G': 0,'H':0}print DFS_hungary(nx, ny, edge, cx, cy, visited).max_match()结果为4,是正确的。
deepsort中的匈牙利算法和卡尔曼滤波公式解释

deepsort中的匈牙利算法和卡尔曼滤波公式解释文章标题:深入理解DeepSORT中的匈牙利算法和卡尔曼滤波公式一、引言在计算机视觉和目标追踪领域,DeepSORT(Deep learning to track multi-object in real time)是一种非常流行的多目标跟踪算法。
其中,匈牙利算法和卡尔曼滤波公式是其核心部分,对于实现高效准确的目标追踪至关重要。
在本文中,我们将深入探讨DeepSORT中的匈牙利算法和卡尔曼滤波公式,从理论到实践全方位解释其原理和应用。
二、匈牙利算法的原理和应用1. 原理解释匈牙利算法,又称匈牙利匹配算法,是一种解决指派问题的二分图最优匹配算法。
在目标追踪中,它常用于在每一帧的检测结果中,将追踪目标与检测结果进行匹配,从而建立目标的长期运动轨迹。
在匈牙利算法中,首先需要构建一个成本矩阵,用于描述每个追踪目标与每个检测结果之间的匹配成本。
通过最小化总匹配成本的方式,计算出最优的匹配结果,从而实现目标追踪过程中的关联匹配。
2. 应用场景在DeepSORT中,匈牙利算法被广泛应用于多目标追踪的匹配过程中。
通过匈牙利算法,能够高效地将不同帧之间的目标轨迹进行匹配,从而实现多目标的连续跟踪。
这种方法在实时目标追踪领域具有重要的意义,尤其是在视频监控、智能交通等领域的应用更为广泛。
三、卡尔曼滤波公式的原理和应用1. 原理解释卡尔曼滤波是一种利用线性动态系统的状态方程和观测方程,对系统状态进行估计的优化滤波算法。
在目标追踪中,卡尔曼滤波常用于对目标的位置和速度等状态进行预测和修正。
卡尔曼滤波通过不断地将实际观测值与系统状态进行比较,并结合系统的动态特性,计算出最优的状态估计值。
这种方法能够在一定程度上消除观测误差和系统噪声,从而实现对目标状态的准确估计。
2. 应用场景在DeepSORT中,卡尔曼滤波被广泛应用于多目标跟踪的状态估计过程中。
通过结合目标的运动模型和实际观测值,卡尔曼滤波能够对目标的位置、速度等状态进行持续修正,从而提高目标追踪的准确性和稳定性。
匈牙利匹配算法的原理

匈牙利匹配算法的原理1. 二分图的定义和表示2. 匈牙利算法的思路3. 匈牙利算法的流程4. 匈牙利算法的实现细节5. 匈牙利算法的时间复杂度和优化方法一、二分图的定义和表示二分图是指一个图的节点可以被分成两个不相交的集合A和B,并且这个图中的每一条边都连接一种类型的点到另一种类型的点。
比如下图就是一个二分图:红色的节点集合A为{1,2,3,4},绿色的节点集合B为{5,6,7},这个二分图中的边连接着节点集合A和B中的节点。
这个二分图可以用一个邻接矩阵或邻接表来表示。
二、匈牙利算法的思路匈牙利算法就是基于二分图的特点,采用增广路的思想,在该图中寻找从某个未匹配点出发,能够增加一条匹配边的路径。
具体找到的这条路径称之为增广路。
通过不断地寻找增广路,可以找到最大匹配。
1. 初始化:所有的节点都没有匹配,无数个节点都是自由节点。
初始时可以假设所有的匹配都为空。
2. 选择自由节点开始搜索:从未匹配的节点开始遍历,如果发现了一个未被检查过的自由节点,就从这个节点开始进行深度优先搜索(DFS)。
3. 搜索增广路:对于任意一个节点,如果它还没有被匹配,那么就找到和它有边连接的节点。
如果该节点没有匹配,那么就找到了一条增广路(因为这条路的两个端点都是自由节点),此时退出DFS并返回true。
否则,如果该节点已经有匹配了,就递归地尝试去找该节点的匹配节点。
这里需要注意的是,一旦某个节点尝试找到了增广路,那么后续的节点都不需要再进行探索。
4. 匹配:如果找到了增广路,就从路径上交替匹配边,这些边将变成匹配边。
如果没有找到增广路,退出DFS并返回false。
1. 如何判断节点是否为自由节点?在初始时,所有的节点都是自由节点,每次匹配成功后,匹配边的两个点都会变成非自由节点。
重点是如何判断一个非自由节点是否已经匹配。
常用的方法是使用match[i]来表示i节点已经匹配的节点编号。
匈牙利算法基本原理

匈牙利算法基本原理匈牙利算法是解决二分图最大匹配问题的一种经典算法。
该算法由匈牙利数学家Egerváry Jenő于1930年代初发现,后来由匈牙利的两位数学家Dénes Kőnig和Jenő Egerváry进行深入研究和推广,因此得名为匈牙利算法。
二分图是指图的所有顶点可以被分为两个不相交的集合,并且图的所有边连接两个集合中的顶点。
最大匹配问题是在二分图中寻找最大的边集合,使得任意两条边的顶点不相交。
1.初始化:首先,我们需要给定一个二分图,以及两个空的顶点集合U和V,分别用来存储左侧和右侧顶点的匹配状态,初始时,所有顶点均未匹配。
2.寻找增广路径:从左侧的一个未匹配顶点开始,按照深度优先(DFS)的方式,递归地寻找可能的增广路径(即一条由未匹配顶点和已匹配顶点交替组成的路径,路径的首尾顶点未匹配)。
如果找到了增广路径,则将路径上的顶点进行匹配或取消匹配。
如果无法找到增广路径,则转到第3步。
3.寻找增广轨:如果在第2步中无法找到增广路径,则可以说明当前的匹配是最大匹配,因此算法结束。
否则,我们需要进行增广轨的寻找。
-将所有的顶点标记为未访问状态。
-从左侧的任意一个未匹配顶点开始,按照广度优先(BFS)的方式,寻找增广轨。
如果找到了增广轨,则将轨上的顶点进行匹配或取消匹配,并结束算法。
否则,继续遍历直到左侧所有未匹配顶点都被访问过。
总结起来,匈牙利算法是一种解决二分图最大匹配问题的经典算法,通过交替路径的增广来不断更新匹配状态,直到达到最大匹配。
它可以通过深度优先和广度优先的方式来寻找增广路径和增广轨,时间复杂度为O(V*E)。
匈牙利算法在实际问题中有着广泛的应用和研究。
数学建模匈牙利算法

数学建模匈牙利算法
摘要:
1.数学建模与匈牙利算法简介
2.匈牙利算法的基本原理
3.匈牙利算法的应用实例
4.结论
正文:
一、数学建模与匈牙利算法简介
数学建模是一种利用数学方法解决实际问题的科学研究方法,其主要目的是通过建立数学模型,揭示问题的本质,从而为问题求解提供理论依据。
匈牙利算法是解决数学建模中整数规划问题的一种有效方法,它主要用于求解二分图的最大匹配问题。
二、匈牙利算法的基本原理
1.互斥约束
在整数规划问题中,如果约束条件是互斥约束,可以新增一个决策变量y (取值为0 或1),并新增一个无穷大M。
2.匈牙利算法的基本思想
匈牙利算法的基本思想是依次寻找图中的匹配边,并将非匹配边加入到图中,直到找不到匹配边为止。
算法的执行过程可以分为两个阶段:第一阶段是构造阶段,主要目的是找到一个可行解;第二阶段是优化阶段,主要目的是通过交替寻找匹配边和非匹配边,逐步改善解的质量,直至找到最优解。
三、匈牙利算法的应用实例
匈牙利算法在实际应用中具有广泛的应用,其中最典型的应用是求解二分图的最大匹配问题。
例如,在任务分配、资源调度、数据融合等领域,都可以通过匈牙利算法来找到最优解。
四、结论
匈牙利算法是解决整数规划问题的一种有效方法,它具有计算简便、效率高等优点。
匈牙利算法理论根据证明新探

匈牙利算法理论根据证明新探匈牙利算法是一种经典的图论算法,被广泛应用于解决最大二分匹配问题。
其算法核心思想是通过增广路径来不断扩展匹配,直至无法增广为止。
本文将从算法原理、证明根据和新的拓展领域三个方面对匈牙利算法进行探讨。
一、算法原理匈牙利算法是由匈牙利数学家Dénes Kőnig于1931年首次提出,也因此得名。
该算法主要用于解决二分图的最大匹配问题,即对于一个二分图G=(V, E),求解能够使得匹配边的数量达到最大的匹配。
算法步骤如下:1. 初始化:将所有点的匹配状态设为未匹配,并设置一个空的匹配集。
2. 遍历每个顶点v属于V中的左部顶点,对每个顶点进行如下操作:a. 若v未匹配,则构造增广路径,找到一条v为起点的增广路径。
b. 若找到增广路径,将路径上的所有未匹配边和已匹配边进行交换,同时将该顶点加入到匹配集合中。
3. 重复第二步直至所有顶点都被匹配或无法找到增广路径。
二、证明根据匈牙利算法的正确性是基于以下定理进行证明的:定理1:对于一个二分图G=(V, E),M为其最大匹配,P为其所有增广路径的集合,则满足|M|=|P|。
首先,证明M是G的一个匹配是显然的。
其次,假设存在一条未匹配边e不属于M,但e可以通过增广路径与M中的匹配边相交换,将e纳入匹配集合M中。
由此可知,对于任意一条增广路径,总存在一种方式将其加入到匹配集合中,从而使得|M| >= |P|。
而对于M的任意一个增广路径P',通过将P'中匹配边与未匹配边相互交换,可以得到一个新的匹配集合M',其中|M'| = |M| + 1。
这表明,对于每条增广路径,总存在一种方式将其加入到匹配集合中,并且得到的新匹配集合M'的大小比M大1。
综上所述,根据该定理的证明,匈牙利算法能够得到二分图的最大匹配。
三、新的拓展领域除了应用于二分图的最大匹配问题,匈牙利算法还可以在其他领域进行拓展应用。
匈牙利算法

第二种就是我现在要讲的匈牙利算法。
这个算法说白了就是最大流的算法,但是它跟据二分图匹配这个问题的特点,把最大流算法做了简化,提高了效率。
最大流算法的核心问题就是找增广路径(augment path)。
匈牙利算法也不例外,它的基本模式就是:初始时最大匹配为空while 找得到增广路径do 把增广路径加入到最大匹配中去可见和最大流算法是一样的。
但是这里的增广路径就有它一定的特殊性,下面我来分析一下。
(注:匈牙利算法虽然根本上是最大流算法,但是它不需要建网络模型,所以图中不再需要源点和汇点,仅仅是一个二分图。
每条边也不需要有方向。
)图1是我给出的二分图中的一个匹配:[1,5]和[2,6]。
图2就是在这个匹配的基础上找到的一条增广路径:3->6->2->5->1->4。
我们借由它来描述一下二分图中的增广路径的性质:(1)有奇数条边。
(2)起点在二分图的左半边,终点在右半边。
(3)路径上的点一定是一个在左半边,一个在右半边,交替出现。
(其实二分图的性质就决定了这一点,因为二分图同一边的点之间没有边相连,不要忘记哦。
)(4)整条路径上没有重复的点。
(5)起点和终点都是目前还没有配对的点,而其它所有点都是已经配好对的。
(如图1、图2所示,[1,5]和[2,6]在图1中是两对已经配好对的点;而起点3和终点4目前还没有与其它点配对。
)(6)路径上的所有第奇数条边都不在原匹配中,所有第偶数条边都出现在原匹配中。
(如图1、图2所示,原有的匹配是[1,5]和[2,6],这两条配匹的边在图2给出的增广路径中分边是第2和第4条边。
而增广路径的第1、3、5条边都没有出现在图1给出的匹配中。
)(7)最后,也是最重要的一条,把增广路径上的所有第奇数条边加入到原匹配中去,并把增广路径中的所有第偶数条边从原匹配中删除(这个操作称为增广路径的取反),则新的匹配数就比原匹配数增加了1个。
(如图2所示,新的匹配就是所有蓝色的边,而所有红色的边则从原匹配中删除。
两个点集配对问题 匈牙利算法

两个点集配对问题匈牙利算法摘要:1.两个点集配对问题简介2.匈牙利算法的基本原理3.匈牙利算法的应用场景4.匈牙利算法的优缺点5.实际案例分析正文:在我们的生活中,经常遇到需要将两个点集进行配对的问题,例如在线约会平台为用户推荐匹配的伴侣,或者学校为学生分配宿舍等。
为了解决这类问题,匈牙利算法应运而生。
本文将详细介绍两个点集配对问题、匈牙利算法的基本原理、应用场景以及优缺点。
一、两个点集配对问题简介两个点集配对问题,是指在给定两个点集A和B的情况下,寻找一种最优的配对方式,使得A中的每个点都与B中的一个点配对,且配对数量最大化。
这是一个典型的组合优化问题,可以用图论中的匹配概念来表示。
二、匈牙利算法的基本原理匈牙利算法(Hungarian algorithm),又称霍夫曼编码算法,是由匈牙利数学家Alfréd Rényi和Miklós匈格尔于1957年独立发现的。
该算法基于图论中的最大匹配问题,通过不断地交换相邻顶点来实现最优匹配。
1.将A、B两个点集分别表示为两个矩阵A和B,其中A[:, i]表示A中第i个点的坐标,B[:, j]表示B中第j个点的坐标。
2.计算A和B的匹配矩阵C,C[:, i]表示A中第i个点与B中哪个点匹配。
3.初始化一个长度为A中点数的空矩阵,用于存放已匹配的点。
4.遍历A中的每个点,判断其相邻点是否已匹配,若未匹配,则尝试与B 中未匹配的点进行配对,并更新匹配矩阵C。
5.重复步骤4,直到A和B中的所有点都完成匹配。
6.输出匹配矩阵C,即为最优配对结果。
三、匈牙利算法的应用场景1.任务分配:将一组任务分配给多个人完成,使得每个人的任务量尽量均衡。
2.资源调度:在多个资源供应者和需求者之间分配资源,使得供需平衡且整体效益最大化。
3.生产线调度:将多个生产任务分配给生产线上的机器,使得生产效率最大化。
4.配对问题:如在线约会平台为用户推荐匹配的伴侣,学校为学生分配宿舍等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
匈牙利算法 by gqp
1、算法原理:用找增广路的方式来解决二分图最大匹配问题。
流程大致如下。
(1)从一个点出发找增广路,直到所有点都找过。
(2)如果找到增更新路径并匹配数加1,重复(1)。
(3)如果未找到增广路则重复(1)。
这个算法很简单,就是找增广路。
所谓的增广路也就是在图中找到一条交错路(见图示,红色找过,蓝色没找过),也就是已经找过的边和未找过的边交替出现,并且开始和结尾都是没找过的。
如下图所示就是一条增广路。
我可以发现这条路一定是奇数,并且把这条
路取反就可以获得一种更多匹配的方案,也就是把蓝色边取,而放弃红色边。
从实际出发就是本来是A ——C ,而现在发现D ——C 并且还有A ——B ,由于A 还可以匹配C 之外的点,而C 又可以被D 匹配,那么我们就用D 代替A ,让A 可以匹配其他点,这样显然方案变得更优。
而算法就是不断找增广路。
找到增广路就意味着我们的方案变得更优。
而当找不到方案时,一定就已经找到最优解。
我们可以这样考虑,如果没有达到最优,那么一定是有这样一种情况,有点C 已经匹配A ——C ,而这时C 还可被其他闲置点匹配且A 还可以匹配其他闲置点。
而这种情况与上图一致,我们可以发现这时一定可以找到增广路。
所以当找不到增广路时就找到了最优解。
2、算法实现,dfs 很简单,就不说了。
可以上网找代码。
不过递归总归是有缺点,于是我写了个bfs 来实现。
Dfs 实现和算法思想很一致,找到个点就增广,如果找到闲置点则找到增广路,否则看谁跟此点匹配,再继续找增广。
也就是一条路走完看是不是增广再找其他路。
而bfs 则是同时多路查找,一旦找到增广路就停止。
对于常见题目,稀疏的图,bfs 显然更好。
当然他们的复杂度差的不多,至少我跑十万点的图,时间上只差0.1以内。
不过由于栈的限制,所以还是bfs 更实用。
Bfs 的实现其实也很简单,不过要引入一个数组fa 来记录找寻的路径,因为bfs 无法回溯改路径,所以要记录每次查找的路径。
当然还需要记录匹配路径的数组f ,为了避免重复查找,我还弄了个标记数组ff 。
核心代码如下。
Procedure Bfs(i : Longint);
Var
op, ed, t, k : Longint;
Begin
op := 0;{没必要写循环队列,由于标记数组每个点一定只进一次}
ed := 1;
q[1] := i;
Repeat
Inc(op);
t := q[op];
k := last[t];
A C
B
D
While k<>-1 do begin
If ff[e[k].y] Then Begin
ff[e[k].y] := False;
If f[e[k].y]=0 Then Begin
temp := e[k].y;
fa[e[k].y] := t;{注意当直接找的时fa数组也要更新}
Exit;{这个exit很重要,否则他会继续找其他增广路,对时间影响很大}
End Else Begin
if ff[f[e[k].y]] Then Begin
inc(ed);
q[ed] := f[e[k].y];
fa[e[k].y] := t;
fa[q[ed]] := e[k].y;
End;
End;
End;
k := e[k].next;
End;
Until op>=ed;
End;
调用部分
Fillchar(f, Sizeof(f), 0);
For i:=1 To n Do Begin
Fillchar(ff, Sizeof(ff), True);{我试过用fa代替ff的功能,看似节省了空间,可实际上时间差很多,因为fa会自动更新所以不用初始化,但如果代替ff则要初始化,这样慢很多} ff[i] := false;
Bfs(i);
While fa[temp]<>0 Do Begin
f[temp] := fa[temp];
temp := fa[temp];
If temp=0 Then Break;
temp := fa[temp];
End;
End;。