开环伯德图绘制
典型环节的Bode图
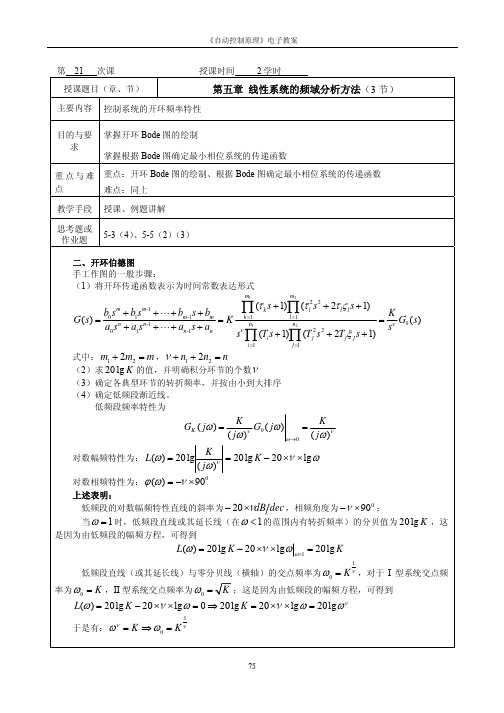
控制系统的开环频率特性目的:掌握开环Bode 图的绘制根据Bode 图确定最小相位系统的传递函数 重点:开环Bode 图的绘制、根据Bode 图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK 的值,并明确积分环节的个数ν 3)通过(1,20lgK )绘制斜率为-20vdB/dec 低频段 4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义: 递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
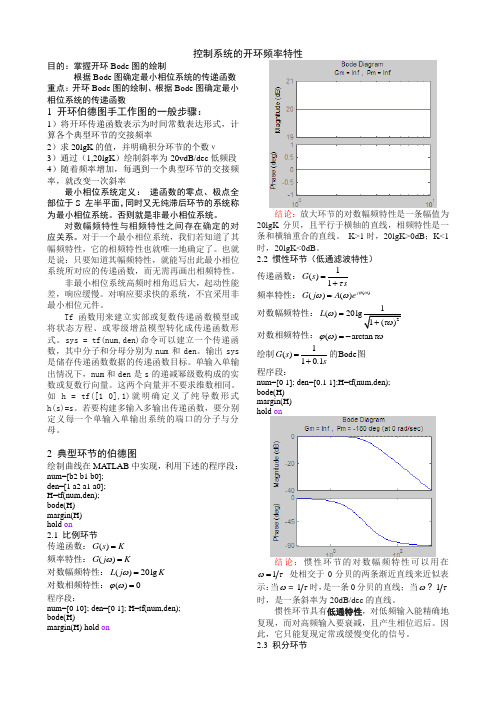
2 典型环节的伯德图绘制曲线在MA TLAB 中实现,利用下述的程序段:num=[b2 b1 b0]; den=[1 a2 a1 a0]; H=tf(num,den); bode(H) margin(H) hold on2.1 比例环节传递函数:()G s K = 频率特性:()G j K ω=对数幅频特性:()20lg L j K ω= 对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den); bode(H)margin(H) holdon结论:放大环节的对数幅频特性是一条幅值为20lgK 分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
K>1时,20lgK>0dB ;K<1时,20lgK<0dB 。
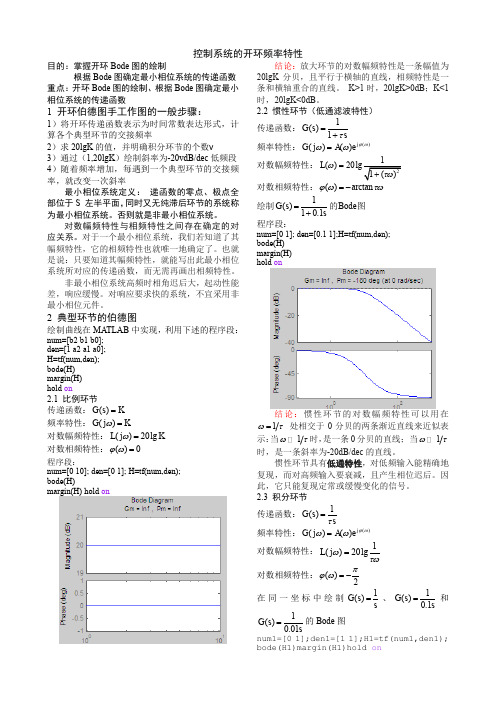
2.2 惯性环节(低通滤波特性)传递函数:1()1G s sτ=+频率特性:()()()j G j A e ϕωωω=对数幅频特性:21()20lg 1()L ωτω=+对数相频特性:()arctan ϕωτω=-绘制1()10.1G s s=+的Bode 图程序段:num=[0 1]; den=[0.1 1];H=tf(num,den); bode(H) margin(H) holdon结论:惯性环节的对数幅频特性可以用在1ωτ= 处相交于0分贝的两条渐近直线来近似表示:当1ωτ时,是一条0分贝的直线; 当1ωτ时,是一条斜率为-20dB/dec 的直线。
如何绘制伯德图
5-14,可知,一阶微分 环节与惯性环节的对数 幅频特性和相频特性是
900 ( )
度
1 1 100
1 1 10
1 1 10 渐近特性
100
1
450
00
45o / dec
1 1 100
1 1 10
1
10
1
100
1
以横轴(ω 轴)为对称的。
图5-16 一阶微分环节的Bode图
振荡环节对数幅频特性的渐近线,它们的转折频率为
幅频特性曲线的渐近线如图5-17所示。
T
。对数
14
dB
L( )
1 1 10 T 1 T
低频渐近线
10
0
1 T
40 dB /dec
20
40
高频渐近线
图5-17 振荡环节渐进线对数幅频特性
•振荡环节的相频特性是 2 T G ( j ) arctg 2 2) • ( 5-83 1 T
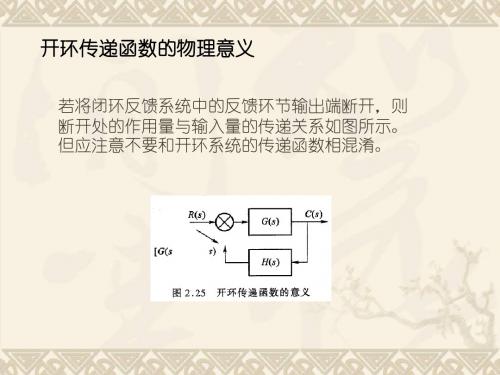
(三) 惯性环节 惯性环节的频率特性是
G ( j)
其对数幅频特性是
1 jT 1
(5-73)
1
20 lg G ( j ) 20 lg 20 lg 1T22
典型环节的Bode图
控制系统的开环频率特性目的:掌握开环Bode图的绘制根据Bode图确定最小相位系统的传递函数重点:开环Bode图的绘制、根据Bode图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK的值,并明确积分环节的个数ν3)通过(1,20lgK)绘制斜率为-20vdB/dec低频段4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义:递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
Tf函数用来建立实部或复数传递函数模型或将状态方程、或零级增益模型转化成传递函数形式。
sys = tf(num,den)命令可以建立一个传递函数,其中分子和分母分别为num和den。
输出sys 是储存传递函数数据的传递函数目标。
单输入单输出情况下,num和den是s的递减幂级数构成的实数或复数行向量。
这两个向量并不要求维数相同。
如h = tf([1 0],1)就明确定义了纯导数形式h(s)=s。
若要构建多输入多输出传递函数,要分别定义每一个单输入单输出系统的端口的分子与分母。
2 典型环节的伯德图绘制曲线在MA TLAB中实现,利用下述的程序段:num=[b2 b1 b0];den=[1 a2 a1 a0];H=tf(num,den);bode(H)margin(H)hold on2.1 比例环节传递函数:()G s K=频率特性:()G j Kω=对数幅频特性:()20lgL j Kω=对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den);bode(H)margin(H) holdon结论:放大环节的对数幅频特性是一条幅值为20lgK分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
BODE图的讲解

L() 20 lg () *90
共二十三页
( )
§5.3.1 典型环节的Bode图
§5.3.1 典型(diǎnxíng)环节的Bode图
⑶ 积分(jīfēn) G( j ) 1
环节
j
L() 20lg () 90
当 G( j) ( 1 ) j
L() 20 lg () 90*
⑷ 惯性环节
§5.3.1 典型(diǎnxíng)环节的Bode图
⑹ 节
振荡(zhèndàng)G环(s)
n2 s2 2ns n2
G(
j )
1
2
2 n
1
j2
n
L( ) 20lg
[1
2 n2
]2
[2
n
]2
( )
arctan 2
n
1 -
2
2 n
1
n
1
n
L() 0 () 0
L( ) 40lg n
第一转折频率之左 的特性及其延长线
共二十三页
内容(nèiróng)总结
1)由开环频率特性 求出幅频特性 和相频特性 ,或实频 特性 和虚频特性。不含零点时,模值和相位一般会单调收缩 ,当有零点时,曲线可能会扭曲。(4) (非直线)特性曲线可以绘制 渐近对数(duìshù)幅频特性,进一步简化绘制过程。是一条斜率为+ 20db/dec,过(1,0)点的直线,记作〔+20〕。谐振频率wr 和谐振 峰值Mr。① 两惯性环节转折频率很接近时
30dB
20( lgc
lg
2)
20 lg
c
2
lg c 30 1.5
2 20
c 2 101.5 63.2 rad s
如何绘制伯德图
。
6
设 ' 10 ,则有
20 lg 20 lg 10 20 20 lg
'
(5-68)
dB L( )
可见,其对数幅频特性是一条在 ω =1(弧度/秒)处穿过零分贝线 ( ω 轴),且以每增加十倍频降 低 20 分贝的速度( -20dB/dec ) 变化的直线。 积分环节的相频特性是
对数幅频特性为
20 lg G( j ) 20 lg K
(5-61)
当K>1时,20lgK>0,位于横轴上方;
当K=1时,20lgK=0,与横轴重合;
当K<1时,20lgK<0,位于横轴下方。
4
放大环节的对数幅频特性如图5-11所示,它是一条与角频 率ω 无关且平行于横轴的直线,其纵坐 标为20lgK。
0
100
1000
(5-63)
180
0
放大环节的相频特性是
G( j ) 0
0
图5-11 放大环节的Bode图
(5-64) 如图5-11所示,它是一条与角频率ω无关且与ω轴重合的直线。
5
(二)积分环节 积分环节的频率特性是
G ( j ) 1 j j 1
1
e
j 90
2 2 2
(5-85)
相频特性是
G ( j ) arctg 2 1
2 2
dB
40
(5-86)20
0
1 1 10
0
精确特性
40dB / dec
二阶微分环节与振荡节的Bode
1
图关于ω 轴对称,如图5-21 。
系统开环频率特性的绘制
20lg G1( j)
v 20 lg
Kv
j
20lg Kv 20lg v 0
v
和
20lg G2 ( j)
a
20 lg
Ka
2
a
20 lg
Ka
20 lg
2 a
0
(5-95)
(5-96)
8
由上面两式分别得到
v Kv
(5-97)
a
Ka 或Ka
2 a
(5-98)
通过上面的分析,在绘制传递函数为式(5-93)和(5-94) 的对数幅频特 性时,可用下述两种方法之一进行。
1
一、绘制系统开环频率特性极坐标图的步骤
1. 将系统开环传递函数分解成若干典型环节的串联形式; 2.典型环节幅频特性相乘得到系统开环幅频特性, 3.典型环节相频特性相加得到系统开环相频特性; 4.如幅频特性有渐近线,则根据开环频率特性表达式的实部和
虚部,求出渐近线; 5.最后在G(jω)H(jω)平面上绘制出系统开环频率特性的极坐标图。
dB
dB
a
A
20dB / dec
0 20log KV
1
V
图5-26 KV与V的关系
a
A
0 20log Ka
40dB / dec
1 a
图5-27 Ka 与 a的关系
9
方法一:对于式(5-93),先过横轴上ω=1点作横轴的垂 直线,过纵轴上20lgKv点作横轴的平行线,这两条直线交于A 点,然后过A点作斜率为 -20dB/dec的直线即为所求的对数幅 频特性(图5-26);对于式( 5-94),过横轴上ω=1 点作横 轴的垂线过纵轴上20lgKa 点作横轴的平行线,这两条直线交 于A点,然后过A点作斜率为-40dB/dec的直线即为所求的对数 幅频特性(图5-27)。
第五章_开环伯德图
ω tg1ω T
11
L ( )
dB
20
20 0
( )
90
1 10T
1 T
10 T
45 0
1 10T
1 T
10 T
一阶微分环节高频渐近线的斜率是+20dB/dec,其 相位变化范围由0°(ω=0)经+45°至90°(ω=∞)
0.7
0.3 0.2
( )
180 90 0
0.7
0.3 0.2
1 10T
1 T
10 T
20
8.延迟环节
幅频特性 相频特性
( )
0 100 200 300 400
1 10T
e jω
T
Lω 20lgG jω 20lg1 0 dB
1 T 2ω 2
即二阶微分环节的幅频和相频特性分别与振 荡环节的相应特性是关于横轴对称。此时, 其对数幅频特性的高频渐近线的斜率为 +40dB/dec而相频由0°(对应ω=0)经 1 90°ω ω T ,最后趋于180°(ω→∞)。
n
19
L( )
40 20
0dBBiblioteka 409000.1
1
10
6
4. 惯性环节
惯性环节的幅频特性为
G jω 1 1 jω T
惯性环节的幅频特性
20 lg 1 1 20 lg 20 lg 1 2T 2 1 jT 1 2T 2
1 在 ω T 时(低频段):
20lg 1 ω2T 2 20lg1 0 dB
§5-3系统开环频率特性的绘制(精)
(T1 T2 ) G ( j ) H ( j ) arctgT1 arctgT2 arctg 1 T1T2 2
4
(1)极坐标图
当 0 时, G( j ) H ( j ) K , G( j ) H ( j ) 00 当
1 1 1 1 和 ,且 T1 T2 T2 T1
L ( ) dB L ( )
A
20 log K
0
B
渐近特性
,将它们
20dB / dec
1 T1
精确特性
在ω 轴上标出(图5-25); 在纵坐标上找到 20lgK 的点 A , 过 A 点作平行于横轴 的直线 AB ,这 条平行线对应放大环节的幅频特 性;
C
1 T2
40dB / dec
(1)
度
( 2)
D
(3)
0 1 在交接频率 T 处作ω 轴的垂线 1 450
(虚线)交平行线AB于B点,以B 为起点作斜率为-20dB/dec的斜
1 线BC,C点对应交接频率 ,折线 T2
( 4)
ABC对应放大环节K和惯性环节 1 的叠加; Ts 1
图5-25 开环系统Bode图
8
由上面两式分别得到
v Kv
a
2 K a 或K a a
(5-97)
(5-98)
通过上面的分析,在绘制传递函数为式(5-93)和(5-94) 的对数幅频特 性时,可用下述两种方法之一进行。
dB
dB
a
0
20 log KV
A
20dB / dec
开环伯德图的绘制
0.1
arctg
20
g 20
幅值裕度 c 1
(c ) 90 arctg
177.15
c
0
90
0.1
arctg
c
20
180 (c ) 2.85
180
270
相角裕度 g 1.5
1 1 h 2.26 A(g ) G( j1.5)
60dB / dec
开环伯德图(习题五)
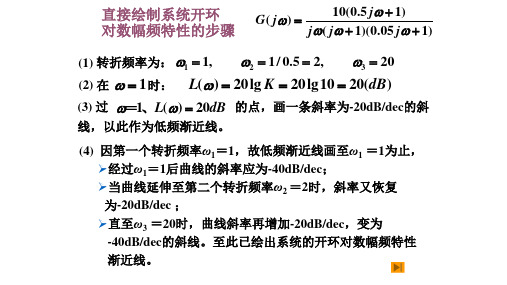
单位负反馈系统传递函数如下,画出幅相曲线,并求稳定裕度 s 100( 1) 100(0.5 j 1) 2 G( j ) G( s) j( j 1)(0.1 j 1)(0.05 j 1) s s s( s 1)( 1)( 1) L( ) 10 20
相频特性曲线的绘制
1. 在确定转角频率之后,找到对应转角频率的相位角
2.
在中间选出一些特殊点,计算对应相位角,最后画 出草图
2
开环伯德图的绘制 L( )
G( s) 50( s 2) s( s 1)
50( j 2) j ( j 1)
40 20
20dB / dec
40dB / dec 20dB / dec
60dB / dec
7
L( )
40
0
40
开环伯德图(习题二)
G( j ) 10 1 1 1 10 j (10 j 1)(0.05 j 1) j (10 j 1) (0.05 j 1)
(c ) 90 arctg
( )
0.1
自动控制原理
潘剑飞
2653-4850(办公室)
伯徳图的画法和在判稳中的应用
例:开环特征方程有两个右根,P=2,试判定闭环系统的稳定性。 解:
P=2
正负穿越数之差(N+-N-)为1
Z=P-2N=2-2=0 系统闭环稳定
例:开环特征方程无右根,P=0,试判定闭环系统的稳定性。 解:
P=0
正负穿越数之差为0
系统闭环稳定
§ 5.4 稳定裕度
♣ ♣ ♣
K值较小时,系统稳定; K值较大时,系统不稳定的; K取某个值时,Nyquist曲线通过 (-1,j0)点,系统处于临界稳定状态。
c ——Nyquist曲线与单位圆交点处(此处幅值为1)的 称为 截止频率(又称剪切频率),记为 c 。
G( jωc ) H ( jωc ) 1
相角裕度 180 G( jc ) H ( jc ) 含义:如果系统对频率为截止频率的信 号的相角滞后再增大 度,则系统处于临界 稳定状态。稳定系统的 > 0 , 越大,系统相 对稳定性越高。
(5) 系统开环对数相频特性表达式为
( ) arctan0.5 900 arctan arctan0.05
逐点计算结果
系统开环相频特性数据
-20dB/dec
20
-20dB/dec -40dB/dec -40dB/dec
例:
L(1) 20lg 7.5 17.5
2. Bode图上的稳定判据
闭环系统稳定的充要条件是:当ω 由0变到 +∞ 时,在开环 对数幅频特性 L(ω)≥0 的频段内,相频特性φ(ω) 穿越-π线的次 数(正穿越与负穿越次数之差)为p/2,p为s平面右半部的开 环极点数。 若开环传递函数无极点分布在S右半平面,即 P 0 , 则闭环系统稳定的充要条件是:在L(ω)≥0 的频段内,相频 特性φ(ω) 在-π线上正负穿越次数代数和为零,或者不穿越 -π线 。 Nyquist图 Bode图
bode图 nyquist图
系统开环Bode图的绘制
单回路开环系统Bode图的绘制步骤
确定各环节的转折频率并由小到大标示在对数频率轴上; 计算20lgK,在ω=1 rad/s处找到纵坐标等于20lgK 的点, 过该点作斜率等于 -20v dB/dec的直线,向左延长此线至所 有环节的转折频率之左,得到最低频段的渐近线。 向右延长最低频段渐近线,每遇到一个转折频率改变一次 渐近线斜率; 对惯性环节,- 20dB/dec 振荡环节, - 40dB/dec 一阶微分环节,+20dB/dec 二阶微分环节,+40dB/dec 对渐近线进行修正以获得准确的幅频特性; 相频特性曲线由各环节的相频特性相加获得。
延迟环节 是不是 最小相位环节 ?
系统开环Bode图的绘制
Bode图的绘制举例
系统开环Bode图的绘制
单回路开环系统Bode图的绘制
系统开环Nyquist图的绘制
概述
K ( n s 1) ( k s 2 k k s 1)
2 2
G( s) s
v
n 1
k 1
2 2 i 1 j 1
系统开环Nyquist图的绘制
概述
G( s ) G1 ( s )G2 ( s )...Gn ( s )
G( j ) A1 ( )e
j1 ( )
A2 ( )e
j 2 ( )
.. An ( )e
j n ( )
A( ) A1 ( ) A2 ( )... An ( )
系统开环Bode图的绘制
最小相位环节的频率特性
(1)定义
凡在右半S 平面上有开环零点或极点的系 统,称为非最小相位系统。 “最小相位” 是指,具有相同幅频特性的 一些环节,其中相角位移有最小可能值的,称 为最小相位环节;反之,其中相角位移大于最 小可能值的环节称为非最小相位环节;后者常 在传递函数中包含右半S平面的零点或极点。
典型环节的Bode图

典型环节的B o d e图-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN控制系统的开环频率特性目的:掌握开环Bode图的绘制根据Bode图确定最小相位系统的传递函数重点:开环Bode图的绘制、根据Bode图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK的值,并明确积分环节的个数ν3)通过(1,20lgK)绘制斜率为-20vdB/dec低频段4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义:递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
2 典型环节的伯德图绘制曲线在MATLAB中实现,利用下述的程序段:num=[b2 b1 b0];den=[1 a2 a1 a0];H=tf(num,den);bode(H)margin(H)hold on比例环节传递函数:()G s K=频率特性:()G j Kω=对数幅频特性:()20lgL j Kω=对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den);bode(H)margin(H) hold on结论:放大环节的对数幅频特性是一条幅值为20lgK分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
K>1时,20lgK>0dB;K<1时,20lgK<0dB。
典型环节的Bode图
控制系统的开环频率特性目的:掌握开环Bode图的绘制根据Bode图确定最小相位系统的传递函数重点:开环Bode图的绘制、根据Bode图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK的值,并明确积分环节的个数ν3)通过(1,20lgK)绘制斜率为-20vdB/dec低频段4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义:递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
Tf函数用来建立实部或复数传递函数模型或将状态方程、或零级增益模型转化成传递函数形式。
sys = tf(num,den)命令可以建立一个传递函数,其中分子和分母分别为num和den。
输出sys 是储存传递函数数据的传递函数目标。
单输入单输出情况下,num和den是s的递减幂级数构成的实数或复数行向量。
这两个向量并不要求维数相同。
如h = tf([1 0],1)就明确定义了纯导数形式h(s)=s。
若要构建多输入多输出传递函数,要分别定义每一个单输入单输出系统的端口的分子与分母。
2 典型环节的伯德图绘制曲线在MA TLAB中实现,利用下述的程序段:num=[b2 b1 b0];den=[1 a2 a1 a0];H=tf(num,den);bode(H)margin(H)hold on2.1 比例环节传递函数:()G s K=频率特性:()G j Kω=对数幅频特性:()20lgL j Kω=对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den);bode(H)margin(H) holdon结论:放大环节的对数幅频特性是一条幅值为20lgK分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
典型环节传递函数及伯德图
( )(度)
0
0.1
1
10
2.积分环节
积分环节的特点:输出量与输入量的积分成正比例,即输出量取 决于输入量对时间的积累过程。 积分环节的微分方程:
积分环节的传递函数:
积分环节的单位阶跃响应:
2.积分环节
积分环节也是自动控制系统中最常见的环节之一,凡是输出量对输入量具有 贮存和积累特点的元件一般都含有积分环节,例如机械运动中位移与转速、 转速与转矩、速度与加速度、电容的电压与电流、水箱的水位与水流量等。 下面介绍几个常见的积分环节。 (1)电动机
6.振荡环节
G jω 1 2 2 L ω 20lg 1 T ω 2 2 T jω 2ζ T jω 1
2ζ Tω
2
2
ω t g1
2ζ Tω 2 2 1 T ω
低频段,即ω T<<1时
10
Lω 20lg1 =0 dB
1 T
10 T
式中,T为惯性时间常数。 惯性环节的传递函数:
惯性环节的单位阶跃响应:
4.惯性环节 (一阶输出的微分环节,是一个相位滞后环节)
自动控制系统中经常含有这种环节,这种环节含有一个储能元件(如储存磁场能 的电感、储存电场能的电容、储存弹性势能的弹簧和储存动能的机械负载等)和 一个耗能元件(如电阻、阻尼器等)。下面通过两个实例来加以说明。
电动机转速和转矩、角位移和转速都是积分关系。 当不考虑负载转矩时,电动机的转矩与转速的关系如下
对上式进行拉氏变换得
而电动机的角位移与转速关系如下
对上式进行拉氏变换可得
5.3.2开环系统bode图的绘制
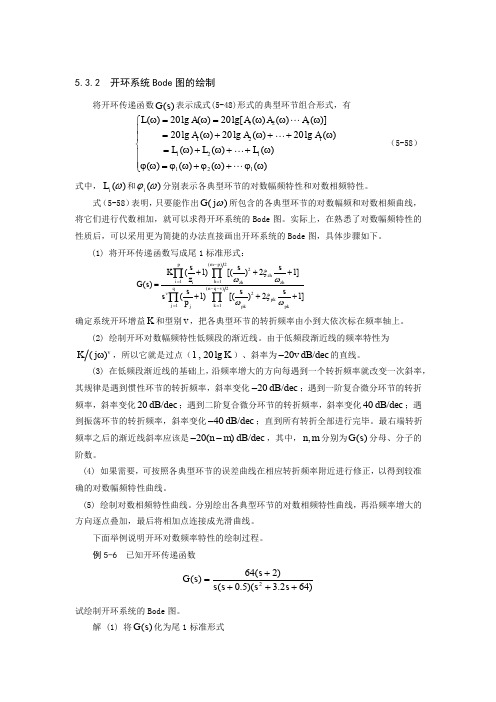
5.3.2 开环系统Bode 图的绘制将开环传递函数()G s 表示成式(5-48)形式的典型环节组合形式,有12121212()20lg ()20lg[()()()]20lg ()20lg ()20lg ()()()()()()()()l l l l L A A A A A A A L L L ω=ω=ωωω⎧⎪=ω+ω++ω⎪⎨=ω+ω++ω⎪⎪ϕω=ϕω+ϕω+ϕω⎩ (5-58) 式中,)(ωi L 和)(ωϕi 分别表示各典型环节的对数幅频特性和对数相频特性。
式(5-58)表明,只要能作出)(ωj G 所包含的各典型环节的对数幅频和对数相频曲线,将它们进行代数相加,就可以求得开环系统的Bode 图。
实际上,在熟悉了对数幅频特性的性质后,可以采用更为简捷的办法直接画出开环系统的Bode 图,具体步骤如下。
(1) 将开环传递函数写成尾1标准形式:()211()2211(1)[()21]()(1)[()21]m p pzh i h i zh zh n q v qv pk j k j pk pks s s K z G s s s s s p -==--==+++=+++∏∏∏∏ξωωξωω 确定系统开环增益K 和型别v ,把各典型环节的转折频率由小到大依次标在频率轴上。
(2) 绘制开环对数幅频特性低频段的渐近线。
由于低频段渐近线的频率特性为()v K j ω,所以它就是过点(K lg 20,1)、斜率为20dB/dec v -的直线。
(3) 在低频段渐近线的基础上,沿频率增大的方向每遇到一个转折频率就改变一次斜率,其规律是遇到惯性环节的转折频率,斜率变化20dB/dec -;遇到一阶复合微分环节的转折频率,斜率变化20dB/dec ;遇到二阶复合微分环节的转折频率,斜率变化40dB/dec ;遇到振荡环节的转折频率,斜率变化40dB/dec -;直到所有转折全部进行完毕。
最右端转折频率之后的渐近线斜率应该是20()dB/dec n m --,其中,m n ,分别为)(s G 分母、分子的阶数。
自动控制理论-19开环对数频率特性曲线的绘制
定理如下:
•如果封闭曲线 s 内有Z个F(s)的 零点,有P个F(s)的极点,则s依 s 顺时针转一圈时,在F(s)平面上, F(s)曲线绕原点反时针转的圈数R为P 和Z之差,即R=P-Z
•若R为负,表示F(s)曲线绕原点顺时针转过 的圈数。
例 已知单位负反馈系统如图所示,试做出 系统的开环伯德图。
解:作L():
(1) G s 40 40 / 4 10 K
s(s 4)
s
1 4
s
1
s
1 4
s
1
s(Ts 1)
因此, 开环增益 K=10
转折频率
1
1 T
4 (1/ s)
20lg K 20 dB
L()/dB
40
-20 dB/dec
辅助函数F(s)具有如下特点: ①其零点和极点分别是闭环和开环的特征根。 ②其零点的个数与极点的个数相同。 ③辅助函数与系统开环传递函数只差常数1。
1.辐角原理(柯西)
设S为复变量,F(S)为S的有理分式函数,对于S平面上任一变
量点,通过复变函数F(S)的映射关系,在F(S)平面上可确定关于变
量的象。
反馈控制系统
开环传递函数
GsH s
M1sM 2 s N1sN2 s
闭环传递函数
(s)
1
Gs GsH s
M1sN2 s N1sN2 s M1sM 2 s
令 Fs 1 GsH s
N1sN2 s M1sM 2 s N1sN2 s
将F(s)写成零、极点形式,有
n
s zi
F s i1 n s pi i 1
开环伯德图绘制
ν
75
《自动控制原理》电子教案
(5)绘制中频段 首先在横坐标轴上将转折频率按从低到高的顺序标出各转折频率。然后,依次在各转折频率处改变 直线的斜率 ,改变的多少取决于转折处环节的性质,如惯性环节的斜率为 − 20dB dec ,振荡环节为
− 40dB dec ,一阶微分环节为 + 20dB dec ,二阶微分环节为 + 40dB dec 等等。 例:已知单位反馈控制系统的开环传递函数为 GK ( s) = 100( s + 2) s( s + 1)(s + 20) ,试绘制其开环
ω
2
由图可知: 解得wc=4,
小结丗对最小相位系统、幅频特性与相频特性的关系
如果幅频特性的斜率为-1对应的相角为-pi/2; 如果幅频特性的斜率为-k对应的相角为-pi*k/2.
77
L(ω ) = 20 lg K − 20 ×ν × lg ω ω =1 = 20 lg K
③低频段直线(或其延长线)与零分贝线(横轴)的交点频率为 ω0 = K ,对于 I 型系统交点频
ν
1
率为 ω0 = K ,II 型系统交点频率为 ω0 =
1
K ;这是因为由低频段的幅频方程,可得到
L(ω ) = 20 lg K − 20 ×ν × lg ω = 0 ⇒ 20 lg K = 20 ×ν × lg ω = 20 lg ων
⎧ L (ω ) = −20 lg 1 + ω 2 − 20 lg lg 1 + 4ω 2 ⎧ϕ (ω ) = arctgω − arctg 2ω ⎪ 1 1 ,⎨ ⎨ 2 2 ⎩ϕ 2 (ω ) = −arctgω − arctg 2ω ⎪ L2 (ω ) = −20 lg 1 + ω − 20 lg lg 1 + 4ω ⎩
典型环节的Bode图
控制系统的开环频率特性目的:掌握开环Bode图的绘制根据Bode图确定最小相位系统的传递函数重点:开环Bode图的绘制、根据Bode图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK的值,并明确积分环节的个数ν3)通过(1,20lgK)绘制斜率为-20vdB/dec低频段4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义:递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
Tf函数用来建立实部或复数传递函数模型或将状态方程、或零级增益模型转化成传递函数形式。
sys = tf(num,den)命令可以建立一个传递函数,其中分子和分母分别为num和den。
输出sys 是储存传递函数数据的传递函数目标。
单输入单输出情况下,num和den是s的递减幂级数构成的实数或复数行向量。
这两个向量并不要求维数相同。
如h = tf([1 0],1)就明确定义了纯导数形式h(s)=s。
若要构建多输入多输出传递函数,要分别定义每一个单输入单输出系统的端口的分子与分母。
2 典型环节的伯德图绘制曲线在MA TLAB中实现,利用下述的程序段:num=[b2 b1 b0];den=[1 a2 a1 a0];H=tf(num,den);bode(H)margin(H)hold on2.1 比例环节传递函数:()G s K=频率特性:()G j Kω=对数幅频特性:()20lgL j Kω=对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den);bode(H)margin(H) holdon结论:放大环节的对数幅频特性是一条幅值为20lgK分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
实验二:绘制控制系统的Bode图(学生用)
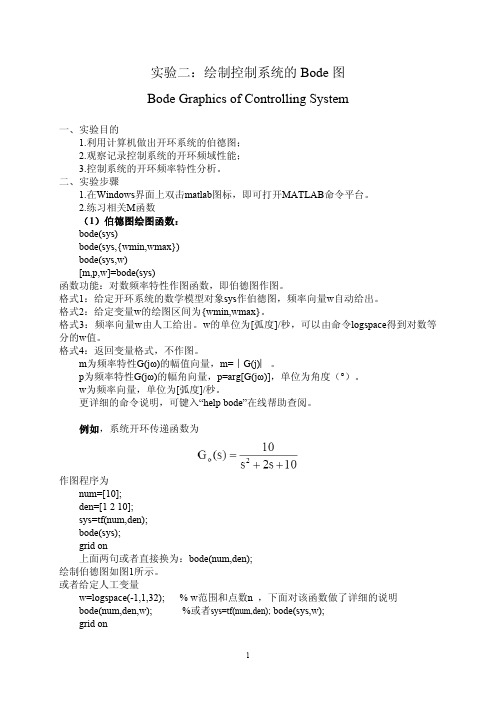
实验二:绘制控制系统的Bode图Bode Graphics of Controlling System一、实验目的1.利用计算机做出开环系统的伯德图;2.观察记录控制系统的开环频域性能;3.控制系统的开环频率特性分析。
二、实验步骤1.在Windows界面上双击matlab图标,即可打开MATLAB命令平台。
2.练习相关M函数(1)伯德图绘图函数:bode(sys)bode(sys,{wmin,wmax})bode(sys,w)[m,p,w]=bode(sys)函数功能:对数频率特性作图函数,即伯德图作图。
格式1:给定开环系统的数学模型对象sys作伯德图,频率向量w自动给出。
格式2:给定变量w的绘图区间为{wmin,wmax}。
格式3:频率向量w由人工给出。
w的单位为[弧度]/秒,可以由命令logspace得到对数等分的w值。
格式4:返回变量格式,不作图。
m为频率特性G(jω)的幅值向量,m=︱G(j)︳。
p为频率特性G(jω)的幅角向量,p=arg[G(jω)],单位为角度(°)。
w为频率向量,单位为[弧度]/秒。
更详细的命令说明,可键入“help bode”在线帮助查阅。
例如,系统开环传递函数为作图程序为num=[10];den=[1 2 10];sys=tf(num,den);bode(sys);grid on上面两句或者直接换为:bode(num,den);绘制伯德图如图1所示。
或者给定人工变量w=logspace(-1,1,32); % w范围和点数n ,下面对该函数做了详细的说明bode(num,den,w); %或者sys=tf(num,den); bode(sys,w);grid on绘制伯德图如图2所示。
图3 伯德图图4 伯德图(2)对数分度函数:logspace(d1,d2)logspace(d1,d2,n)函数功能:产生对数分度向量。
格式1:从10d1到10d2之间作对数等分分度,产生50个元素的对数等间隔向量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
100( s 1)
G(s) s(s 1)( s
2 1)( s
1)
10 20
G( j)
100(0.5 j 1)
j( j 1)(0.1 j 1)(0.05 j 1)
20dB / dec
() 90 arctan arctan arctan arctan
40
40dB / dec 20
300
1 10 100
60dB / dec
9
开环伯德图(习题四)
单位负反馈系统闭环对数幅频特性分段曲线如下,若要 求系统具有30°相位裕度,试计算开环放大倍数增益
L( ) 0 1 1.25
20dB / dec
(s) ? G(s) ? 5
() ?
20
1 2 10 100
G( j) 100 1 1 (0.5 j 1) j ( j 1)
一个比例环节、积分环节、一阶惯性环节
和一阶微分环节构成
转角频率分别为
2
1 T2
2
1
1 T1
1
3
开环伯德图的绘制
L() 20dB / dec
G(s) 50(s 2) s(s 1)
相频特性曲线的绘制
1. 在确定转角频率之后,找到对应转角频率的相位角 2. 在中间选出一些特殊点,计算对应相位角,最后画
出草图
2
开环伯德图的绘制 L()s(s 1)
40
40dB / dec
20dB / dec
G( j) 50( j 2) j( j 1)
( ) 0
90
180 270
G( j)
10
10 1 1
1
j(10 j 1)(0.05 j 1)
j (10 j 1) (0.05 j 1)
(c ) 90
arctg arctg
0.1
20
0.1
g 20
幅值裕度 c 1
(c ) 90
转角频率分别为
1
1 T1
0.1
2
1 T2
20
20dB / dec
20
lg
10
L(
)
20
lg
10
2
0.1 0.1 20
40dB / dec
0.1 c
20
20
lg
20
3
20
c 1
60dB / dec
7
开环伯德图(习题二)
2. 确定每一个环节的转角频率 3. 按转角频率将整个频率范围(横轴)划分成几个区域 4. 将对应的各个典型环节在相应区域内相加
6
开环伯德图(习题二)
L( )
40
0
40
G( j)
10
10 1 1
1
j(10 j 1)(0.05 j 1)
j (10 j 1) (0.05 j 1)
40dB / dec 60dB / dec
c ?
20
lg
0.5
k
L()
20
lg
1.4125 2
k
20
lg
6.25 3
k
2.825
2.825 4.425
4.425
10
开环伯德图(习题五)
L( )
40
单位负反馈系统传递函数如下,画出幅相曲线,并求稳定裕度
arctg c arctg c
0.1
20
177.15
180 (c ) 2.85
相角裕度 g 1.5
h 1 1 2.26
A(g ) G( j1.5)
8
开环伯德图(习题三)
系统对数幅频特性如图所示,确定传递函数
L( )
60
20dB / dec
自动控制原理
潘剑飞 2653-4850(办公室)
pjf@ 深圳大学 机电与控制工程系
1
开环伯德图的绘制
幅频特性曲线的绘制
1. 开环传递函数写成“标准时间”表达式,分解为各 个典型环节
2. 确定每一个环节的转角频率 3. 按转角频率将整个频率范围(横轴)划分成几个区
域 4. 将对应的各个典型环节在相应区域内相加
1 2 10 100
() -92.8 -108.4 -108.4 -95.6 -90.5
-120 4
开环伯德图(习题一)
系统对数幅频特性如图所示,确定传递函数
L() 20dB / dec
0 40
1. 确定每一个环节的转角频率 20 30
2. 找到对应的典型环节
20
3. 确定变量的值
5
0.1 1 2
20dB / dec
40dB / dec
3 4
60dB / dec
5
开环伯德图(习题一)
系统传递函数如下,画出幅频与相频伯德图, 并求稳定裕度
G(s)
10
s(10s 1)(s / 20 1)
G( j)
10
j(10 j 1)(0.05 j 1)
1. 开环传递函数写成“标准时间”表达式,分解为各个典型环 节
G( j) 50( j 2) j( j 1)
40 20
( )
-90
40dB / dec 20dB / dec
() ( j 2) j ( j 1) arctg 90 arctg
2
1 2 10 100
0.1 1 2 10 100
2
10
20
40dB / dec
L() 0 A(c ) 1
20
0
()
90
180
12
20dB / dec
40dB / dec
60dB / dec
g
c
c ? ?
g ? h?
11