基于OpenGL的空间目标图像生成方法
用OpenGL生成三维投影模型的研究

33发展 区域 经济 发 展民族 特色 企业 .
新 疆 经济 欠发 达 ,尤 其 是南 疆 和 北 疆、 农村 和 城 市 的 差距
业 。新 疆 的 经济 欠 发 达 ,从 内地 招 商 引 资 的企 业较 多 ,具 有 民 更是 显 而 易见 。 努 力发 展 区域 经 济 ,缩 小 南 疆与 北 疆 、农 村和 族特 色 的企 业 太 少 ,而后 者 才是 真 正 吸 引少 数 民族 大 学 生就 业 城 市 的差距 ,有 利于 缓解 大学 生集 中地域 就业 的 问题 。 的重要途 径 1 ,所 以少数 民族大 学生 到企业 就业 很难 。 3 】
3 4 家应 给予 多方面 的扶 持与 优惠政 策 .国
21 0 0年 5月 ,中 央 新 疆 工 作 座 谈 会胜 利 召 开 , 意 味着 新 疆 迎来 了新 的发 展机 遇 。国 家应 积极 推进 双语 教 学和 民 汉合校 , 大 力加 强 基础 教 育 师 资 队伍 的 建设 。加 大 对 自治 区各 高校 的投
31 . 少数 民族 大学 生应 努 力提 高 自身 的综合 素质 能力 信 息 时 代 下 ,少 数 民族 毕 业 生要 努 力 提高 自身 素质 ,同 时 应更 新观念 , 立正确 的择业 观 , 需要和 适合 自己的地 方就业 。 树 到 32转变学校教育模式 以及加强对少数 民族 大学生就业的指导 . 现 行 的 大 学教 育 模 式 应 适 应 2 1世纪 国家 人 才 培 养 的 战 略 需 要。 新 疆 高校 教 育 方 法、 考核 方法相 对 落 后 ,无 法 全面 促 进 当代 大学 生提 高 自 己的综 合素 养 。学校 在专 业 结构 、课 程设 置 、 教学 改 革 、师资 配置 、教材 选定 等 方面进 行决 策时 , 充 分征 求 应 学 校 的就 业 指 导 中 心的 建议 和 意 见 , 到信 息 畅通 , 做 对症 下 药 , 把 好质量 关 和特 色关 [。 4 1 信 息 时 代 少数 民族 学 生获 取 有效 的就业 信 息 相 对较 少 ,为 此学校应 当通过各种途径特别是现代 的信息工具为少数 民族学 生提 供 更 多有 效 的 就业 信 息 。学 校 在新 生 入 学时 ,就应 该 安 排
基于OpenGL的舰船目标红外图像生成
b s d o n r r d p y is a d h a r n f r a e n if a e h sc n e t t a se .wh c n l d s t e r d a i n.c n e t n.c n u t n b t e i e e t i h i c u e h a ito o v ci o o d c i e we n d f r n o f
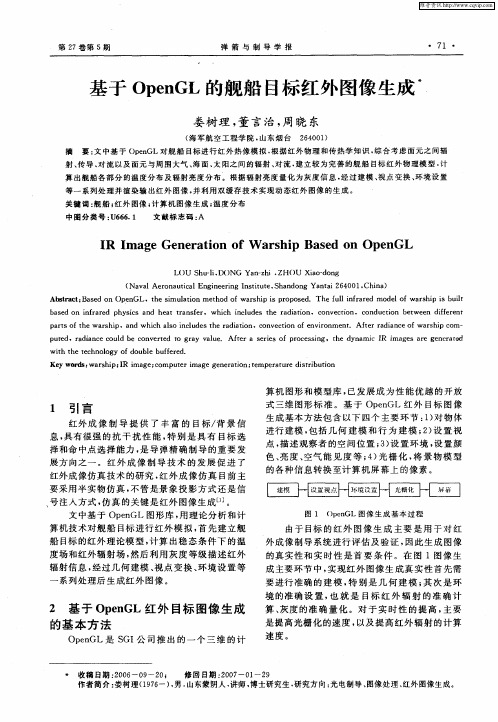
文 中基 于 Op n L 图 形 库 , 理 论 分 析 和 计 eG 用
图 1 Op n e GL 图 像 生 成 基 本 过 程
算 机技术 对舰 船 目标 进行 红外 模 拟 , 先 建立 舰 首 船 目标 的红 外理 论模 型 , 算 出稳 态条 件下 的温 计 度 场和红 外辐射 场 , 然后利 用 灰度 等级 描 述红 外
p td.r d a c o l e c n e t d t r y v l e Afe e is o r c s i g。t e d n mi R ma e r e e a e ue a i n e c u d b o v re O g a a u . tr f s re f p o e sn l h y a c I i g s a e g n r td
算 机 图形 和模 型库 , 已发 展成 为 性 能优越 的开放 式 三维 图形标 准 。基 于 0p n e GL红 外 目标 图像 生成 基本 方法 包含 以下 四个 主要 环 节 : ) 物体 1对 进行 建模 , 包括 几 何 建 模 和 行 为 建 模 ; ) 置 视 2设
OpenGL空间(坐标系)变换

OpenGL空间(坐标系)变换⽹友的《3D图形学的学习策略》⼀⽂使我深受启发,在图形学以及openGL学习⽅⾯给了我很有价值的指导性意见,在此对前辈们的不吝赐教表⽰感激,谢谢你们的⽆私分享。
如⽂章所说,API是⼯具,不是本质,OpenGL/Direct3D的本质是图形学,⽽不是OpenGL/Direct3D的本⾝,API的本⾝只是⼀些Interface⽽已。
最重要的,最根本的是,你要明⽩这些API背后的图形学的原理---因为那才是根本中的根本。
其实很多事情,包括学习也涉及到⽣活,只有抓住了本质,才能体会到其中的真谛。
带着这种希望探究本质的学习⽅法,结合图形学原理,通过阅读书⽬和⽹友们的⽂章,我对OpenGL⼏何空间变换进⾏了总结性的学习。
OpenGL处理管线的⽬的是将对象的三维描述转换为可以显⽰的⼆维图像。
为了完成这个从三维到⼆维的转换,OpenGL 使⽤了多个空间(坐标系),每个空间完成特定的任务,从⼀个空间到另⼀个空间需要进⾏空间转换。
理解OpenGL所使⽤的各种空间以及它们间的变换是⾮常重要的。
如上图所⽰,openGL中使⽤的空间依次是:对象空间、世界空间、视点空间、裁剪空间、归⼀化设备空间、窗⼝空间、屏幕空间。
结合⾃⼰的理解,就每个空间完成的基本任务和空间的变换关系,总结如下。
对象空间。
对象空间中完成的最⼤任务是对象建模,三维对象的属性,包括顶点位置和表⾯法线等是在这个空间内指定的。
这个空间的坐标原点⼀般在对象上,有时候也在其他地⽅,主要是为了建模⽅便。
每⼀个对象都有⼀个⾃⼰的对象空间。
就openGL⽽⾔,我⽬前还没有接触到建⽴很复杂模型的应⽤,建模⼀般在其他地⽅如3DMAX中完成,然后读⼊openGL进⾏处理。
世界空间。
对象空间之后是世界空间,我理解为世界坐标系是固定不变的。
世界空间主要是对三维场景进⾏描述,就是把已经建⽴的各种对象摆放在三维空间中,空间的转换是通过模型变换完成的。
可以通过平移、旋转、⽐例缩放等把对象摆放在需要的位置,就好像买好家具以后设计房间布局⼀样。
利用OpenGL实现三维绘图
利用OpenGL实现三维绘图前言:在三维绘图蓬勃发展的过程中,计算机公司推出了大量的三维绘图软件包。
其中SGI公司推出的OpenGL,作为一个性能优越的图形应用程序设计界面(API)异军突起,取得了很大的成就。
它以高性能的交互式三维图形建模能力和易于编程开发,得到了Microsoft、 IBM、 DEC、 Sun、 HP等大公司的认同。
因此,OpenGL 已经成为一种三维图形开发标准,是从事三维图形开发工作的必要工具。
一.初始化OpenGL绘图环境1.定义颜色格式和缓冲模式OpenGL提供两种颜色模式:RGB(RGBA)模式和颜色索引模式。
在RGBA模式下所有颜色的定义用RGB三个值来表示,有时也加上Alpha值(表示透明度)。
RGB三个分量值的范围都在0和1 之间,它们在最终颜色中所占的比例与它们的值成正比。
如:(1,1,0)表示黄色,(0,0,1)表示蓝色。
颜色索引模式下每个象素的颜色是用颜色索引表中的某个颜色索引值表示(类似于从调色板中选取颜色)。
由于三维图形处理中要求颜色灵活,而且在阴影,光照,雾化,融合等效果处理中RGBA 的效果要比颜色索引模式好,所以,在编程时大多采用RGBA模式。
OpenGL提供了双缓存来绘制图像。
即在显示前台缓存中的图像同时,后台缓存绘制第二幅图像。
当后台绘制完成后,后台缓存中的图像就显示出来,此时原来的前台缓存开始绘制第三幅图像,如此循环往复,以增加图像的输出速度。
设置窗口显示模式函数:voidauxInitDisplayMode(AUX_DOUBLE//双缓存方式|AUX_RGBA);//RGBA颜色模式2.设置光源OpenGL的光源大体分为三种:环境光(Ambient light),即来自于周围环境没有固定方向的光。
漫射光(Diffuse light)来自同一个方向,照射到物体表面时在物体的各个方向上均匀发散。
镜面光(Specular light)则是来自于同一方向,也沿同一个方向反射。
OpenGL图形库中的渲染管线与着色器编程

OpenGL图形库中的渲染管线与着色器编程OpenGL是一个用于图形渲染的开放式图形库,它提供了一个强大的渲染管线和着色器编程功能,使得开发人员能够创建复杂的图形效果。
本文将介绍OpenGL中的渲染管线和着色器编程,并深入解释它们的工作原理和实际应用。
第一部分:渲染管线的概念和原理渲染管线是一个用于在屏幕上绘制图形的过程,它是由一系列的阶段组成的,每个阶段都有特定的功能。
在OpenGL中,渲染管线主要包括几何处理、顶点处理、光栅化、片元处理等阶段。
下面是每个阶段的功能和工作流程。
1.几何处理阶段在几何处理阶段,输入的几何数据被处理和转换成屏幕空间的顶点值,这些顶点值将作为渲染管线的输入。
几何处理阶段通常包括了几何变换、裁剪和投影变换等操作。
在这个阶段,输入的顶点数据会经过一系列矩阵变换,最终转换成屏幕上的像素坐标。
2.顶点处理阶段在顶点处理阶段,每个顶点都被处理成最终的片元坐标,并根据光照和材质属性进行着色。
在这个阶段,每个顶点的位置、颜色和纹理坐标都被计算出来,并传递给下一个阶段。
这个阶段的输出将作为光栅化阶段的输入。
3.光栅化阶段在光栅化阶段,根据顶点处理阶段的输出,将图形转换成像素形式,并执行逐片元的操作。
光栅化的主要任务是确定片元的位置和颜色,并将它们送入片元处理阶段进行处理。
4.片元处理阶段在片元处理阶段,每个片元都经过光照、材质和纹理等计算,最终确定最终的颜色值。
片元处理阶段的输出将被用来绘制最终的图形。
以上是渲染管线的基本概念和流程,下面将进一步介绍着色器编程在渲染管线中的作用和实现方式。
第二部分:着色器编程的概念和实现着色器是一种在图形渲染管线中执行特定任务的计算单元,它用来对图形数据进行处理和着色,从而生成最终的图形效果。
在OpenGL 中,着色器编程是通过Shader Language(GLSL)来实现的,GLSL是一种专门用于图形着色和计算的编程语言。
在OpenGL中,有几种类型的着色器,分别是顶点着色器、片元着色器、几何着色器和计算着色器。
基于OpenGL的三维建模技术【精选】

GLUT和Open Inventor对比
GLUT
Open Inventor
汇报完毕,请批评指正
透视投影
取景体是一个 截头锥体,在这 个体积内的物体 这个锥体的顶点 也就是视点的位 置。
void gluPerspective(fovy,aspect,zNear,zFar)
正交投影
取景体是一 个各面均为矩 形的六面体
void glOrtho(left,right,bottom,top,near,far)
glEnd();
2 利用MFC实现
MFC是一种应用程 序框架。我们可以利 用它非常快速的开发 Windows程序。简单的 说,MFC是Win API与 C++的结合。它具有 完善的消息处理机制。
3 高级图形库
OpenGL提供的功能是比较基本和底层,直接利用 OpenGL来构建复杂的3D图像是很困难的。在 OpenGL的基础上还有Open Inventor、Cosmo3D、 Optimizer等多种高级图形库,来适应不同应用。 Open Inventor 广泛地应用于机械工程设计与仿真、 医学和科学图像、地理科学、石油钻探、虚拟现实 、科学数据可视化等领域。
return 0;
}
glBegin(GL_TRIANGLES); glColor3f(1.0,1.0,1.0); glVertex3f(-1,-1,0.0); glColor3f(0.0,1.0,0.0); glVertex3f(1,0.0,0.0); glColor3f(0.0,0.0,1.0); glVertex3f(0.0,1,0.0);
需要特别指出的是,实际的变换顺序与 指定的顺序是相反的。
程序代码顺序: 旋转变换 平移变换 绘制模型
基于OpenGL的三维可视化技术研究与实现

基于OpenGL的三维可视化技术研究与实现随着计算机技术的飞速发展,三维可视化技术也逐渐成为计算机领域的热门研究方向。
其中,基于OpenGL的三维可视化技术因其高效、易用、跨平台等特点,成为了广泛应用的一种技术。
一、OpenGL概述OpenGL是一种跨平台、开放源代码的图像渲染API,是由Silicon Graphics Inc.开发的一套图形程序接口。
OpenGL在3D图形方面的优越性能以及跨平台特性,使得其得到了广泛应用。
OpenGL的发展也比较迅速,在OpenGL 2.0中加入了可编程管线,使得OpenGL可通过GLSL(OpenGL Shading Language)进行高级图形渲染。
二、基于OpenGL的三维可视化技术基于OpenGL的三维可视化技术可以用于各种领域,例如计算机游戏、虚拟现实、医学、建筑设计等等。
其中,计算机游戏是三维可视化技术应用较早的领域之一。
基于OpenGL的游戏开发可以在各种平台上实现高效、流畅的游戏体验。
虚拟现实也是基于三维可视化技术的重要应用领域。
使用基于OpenGL的虚拟现实技术,可以实现逼真的虚拟环境,使用户产生身临其境的体验。
在医学方面,基于OpenGL的三维可视化技术可以用于医学图像重建、医学模拟、手术演示等。
通过可视化技术,医生可以更直观地了解病患情况,选择更合理的治疗方案。
基于OpenGL的三维可视化技术也被广泛应用于建筑设计领域。
使用可视化技术,设计师可以更清晰地了解设计效果,更快速地进行设计调整。
三、基于OpenGL的三维可视化技术实现基于OpenGL的三维可视化技术需要使用OpenGL的相关库函数进行开发。
其中,可以使用GLUT库进行OpenGL窗口的创建和事件处理。
使用OpenGL的矩阵操作函数可以进行三维模型的旋转、缩放、平移等操作。
通过对三维模型的合理组合,可以实现更为复杂的场景效果。
此外,基于OpenGL的三维可视化技术也可以结合其他技术进行应用。
空间目标和背景的辐照特性仿真技术研究
空间目标和背景的辐照特性仿真技术研究王磊;张涛;崔文楠;吕银环【摘要】对空间目标和空间背景的辐照特性进行分析,建立物理计算模型.在此基础上采用计算机图形学相关的仿真方法,对不同辐照特性天体采用不同仿真手段,建立了辐照特性和仿真灰度之间的对应关系.应用表明,设计的仿真方法能可靠地仿真目标和背景的辐照特性,并且为目标和背景的外型几何特性和运动特性提供了灵活的参数控制方法.设计的仿真技术保留多个可调的参数接口,扩展性强,便于应用推广.【期刊名称】《科学技术与工程》【年(卷),期】2010(010)015【总页数】5页(P3610-3614)【关键词】空间目标;空间背景;辐照特性;地面仿真OpenGL【作者】王磊;张涛;崔文楠;吕银环【作者单位】中国科学院上海技术物理研究所,上海,200083;中国科学院上海技术物理研究所,上海,200083;中国科学院上海技术物理研究所,上海,200083;中国科学院上海技术物理研究所,上海,200083【正文语种】中文【中图分类】TP391.9随着人类进入空间、利用空间能力的不断增强,空间态势感知成为各国发展重点。
美国、加拿大等国都开展建立天基目标监视系统的计划,我国也在逐步开展天基目标监视系统建设。
光电探测是天基目标监视常用的方法之一。
卫星搭载的光电探测载荷在发射之前要进行大量的地面实验,以验证载荷各项性能满足要求。
为了保证地面实验的有效性和经济时间可行性,要对仿真技术进行深入的分析和研究。
国内已有大量文献针对空间目标和背景的轨道姿态动力学特性的仿真方法,然而对于辐照特性的分析和仿真研究甚少。
本文在对空间目标和背景的辐照特性分析和计算的基础上,结合虚拟现实技术,设计实现了基于 OpenGL的空间场景的仿真方法,根据目标和天体的不同辐照特点采用不同的仿真手段实现仿真。
文末给出了仿真结果,并讨论了空间场景仿真技术的扩展性。
1 空间目标和背景辐照特性为了更逼真地模拟空间目标和背景的辐照特性,本文对其辐照特性进行分析。
基于OpenGL的图像动画应用研究
是,只对现实中的旗帜进行了比较简单的模拟,考虑的现实生活
的因 素不完 全 ,没 有将 飘动 物体 与周 围物 体 的关 系表现 出来 , 以 及在 其 飘动 的时 候 ,有些 失真 效果 。
参 考文 献 :
[] o a er,M.al eBs r 算机 图形 学 ( 三版 )M] 1D nl H an d Pui a e计 n k. 第 [ .
一
gM tiM d l a r x o e函数 。
、
( )视 口变 换 。 当一切 工作 已经 就绪 ,只 需要 把像 素绘 制 四 到屏 幕上 了。这 时候 还剩 最后 一个 问题 :应 该把 像素 绘制 到 窗 口 的哪 个 区域 呢 ?通 常情 况 下 ,默认 是完 整 的填充 整个 窗 口,但 完 全可 以只 填 充一 半 。( :把 整个 图象 填充 到一 半 的窗 口内 ) 即 。使 用 g V e p r 来 定义视 口。 中前两 个参数 定义 了视 口的左下脚 l ivo t c 其 ( ,0 示最 左下 方 ) O 表 ,后 两个 参数 分别 是宽 度和 高度 。 二 、0 S P L图像动 画的应 用 实例 ( ) 一 初始 化 0 G P L场 景 。 成功 的载 入纹 理之 后 ,开始旗 帜 在 飘动 工作 之前 ,我们 需要对 O e G p n L场 景,也就是 飘动 具体 实现 的 场所 ,进 行相 对 的初始 化 。 ( )载 入 纹理 。在追 求 更具 有真 实感 的图像方 面 ,纹理 映 二 射技 术是 一个 产 生复杂 表面 的相 对有 效 的手 段 ,并且 不需 要沉 闷 的建 模和 绘制 表 面的每 一个 三维 细节 。通过 纹理 空 间与物 体空 间 之 间的坐 标变 换 ,可 以把纹 理 映射 到物 体表 面 。本文采 用 离散法 做为 纹理 的映射 方 式 。 ( )旗 帜飘 动 。该部 分 的实现 可 分为 两个 部分 ,绘 图与控 三 制绘 图 。绘 图的责任 就 是往 屏幕 上打 印 出预 先 设置好 了的大 量的 四边 形 ,这些 四边 形组 合成 为 旗帜 飘动 过程 中的一 个轮 廓 :而控 制绘 图部 分 的任务 就是 ,控 制好 绘 图时 不是 单调 的用一 种 固 定的 方式往 屏 幕上 打 印 ,而 是有 规律 有 组织 的打 印, 它们组 合起 来 ,就可 以使 在人 眼看 来是 一面 旗 帜在 空间 内飘 动 ,而 不是 幅幅 图片 在屏 幕上 单 调的显 示 。 三、结 束语 O e O 是 三维 技术 的代表 , 且 已经成 为最广 泛采 用 的图形 pnL 并 标准 。它 能 够 生成 逼 真 的三 维 图像 。本篇 文 章就 是运 用 O e G p nL 的逼 真效 果分 三个步 骤 对现 实生 活 中旗 帜的 飘动进 行了 模拟 。但
opengl使用方法教程

使用GDI和WGL函数的方法。
使用OpenGL实用函数库glut的方法。
OpenGL 使用介绍第10页
OpenGL编程方法
OpenGL与Windows的绘图方式是不同的,其区别主要
表现在以下三个方面:
Windows用GDI绘图。
OpenGL用图形操作描述表(着色描述表、绘制描
wglDeleteContext(hglrc);
OpenGL编程方法
管理像素格式的函数
函数功能
ChoosePixelFormat() 返回与制定像素格式最相
近的像素格式
DescribePixelFormat() 得到指定制定像素格式的
信息
GetPixelFormat() 得到指定像素格式
它。
OpenGL 使用介绍第11页
OpenGL 使用介绍第12页
OpenGL编程方法
Windows提供了5个函数管理图形操作描述
表。这5个函数都有前缀“wgl”,各函数的功能 本文来GIS公园
如下所示。
wglCreateContext() 建立一个图形操作描述表
wglDeleteContext() 删除一个图形操作描述表
OpenGL 使用介绍第6页
OpenGL命令语法和规范
OpenGL包含了近200个函数,分为5类:
核心函数:115个,以gl开头。
实用函数:43个,以glu开头。
辅助函数:31个,以aux开头。
专用函数:6个,以wgl开头。
Win32API函数:5个,无特定前缀。
hglrc:指定一个图形操作描述表。
基于OpenGL的建筑物三维建模技术_贾甲
2009年1月第14卷第1期 西 安 邮 电 学 院 学 报JOURNAL OF XI ’AN UN IV ERSIT Y OF POST AND TEL ECOMMUN ICA TIONS Jan.2009Vol 114No 11收稿日期:2008-09-16作者简介:贾 甲(1984-),男,陕西宝鸡人,武警工程学院研究生大队硕士研究生;王 涛(1977-),男,陕西西安人,武警工程学院基础部讲师;刘大伟(1980-),男,山东潍坊人,武警工程学院基础部讲师。
基于Open G L 的建筑物三维建模技术贾 甲1,王 涛2,刘大伟2(1.武警工程学院研究生大队,陕西西安 710086;2.武警工程学院基础部,陕西西安 710086)摘要:建筑物三维模型的构建是数字城市三维可视化的主要内容,采用成熟的商业软件可以提高开发速度,但同时带来价格昂贵、移植性差、硬件要求高等缺点。
采用基于二维地理数据库或摄影影像提取建筑物框架,结合Open G L 丰富强大的三维绘图功能,可以快速的实现对建筑物的三维建模,同时避免了使用商业软件所带来的诸多困难。
关键词:Open G L ;建筑物;三维建模;纹理映射中图分类号:TP311 文献标识码:A 文章编号:1007-3264(2009)01-0142-03引言计算机图形图像、虚拟现实、数据库、可视化和海量存储等技术和相关理论的不断发展,使现实世界三维数字化已成为现实,数字城市建筑物建模过程正朝着简单化、规模化、标准化的方向发展[1-3]。
因此,如何快捷地构建仿真程度较高的建筑物三维模型成为实现数字城市的基本问题,单个建筑物的模型建立方法直接影响到数字城市三维可视化的速度和效果。
本文就从单个建筑物三维模型的构建角度详细说明一种可用于实际的操作方案。
1 利用OpenG L 构建建筑物模型的优势一直以来,由于技术和理论的制约,建筑物三维模型的构建一直是数字城市三维地理信息系统中难实现的一个环节,这也成为了制约三维GIS 发展的一个主要原因。
基于OpenGL的空间目标图像生成方法
ne nuhsaeojc iae.H w vr o a asiii psil t d xe m nsatayb s gra st — edeog pc b tm gs o ee w d y ts m os e o oepr et f ul yui l a l e n b i c l n e e
第2卷 第6 7 期
文 章 编 号 :06— 3 8 2 1 )6—0 6 0 10 9 4 (0 0 0 2 7— 4
计
算
机
仿
真
21年6 00 月
基 于 Op n L 的空 间 目标 图像 生成 方法 eG
韩 意 孙华 燕 李 迎春 樊 , , , 佳
( .装 备 指 挥 技 术 学 院 研 究 生 院 , 京 1 11 1 北 0 46; 2 .装 备 指 挥技 术 学 院 光 电 装 备 系 , 北京 1 1 1 ) 0 4 6 摘要 : 间 目标 监 视 系统 设 计 与 目标 识 别算 法 开发 需 要 有 充 足 的 图 像源 , 解 决 空 间 日标 识 别 问题 , 无 法 采 用 真 实 空 间 1 空 为 在 5 1
f r t n we e g n r td. I a mp o e t e lt nd t e fd lt fsmu ae ma e o mai r e e ae o tc n i r v he r ai a h e i o i l td i g s,c e k u n n n e t y i y h c o ta d e ha c he
( .C m ayo ot aut Maae n , cdmyo qim n o mad& T cnl y B in 0 4 6 C ia 1 o pn f s rdae n gmet A ae f u et m n P g E p C eh oo , eig1 11 , hn ; g j
基于OpenGL的目标成像仿真方法
() 6
其 中 S 比例 因 子 。根 据 ( ) ( ) , 有 为 1~ 6 式 则
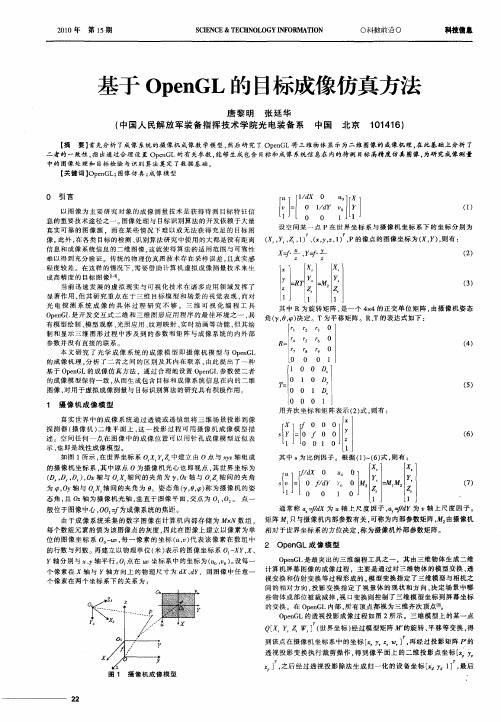
的摄 像 机 坐 标 系 , 中 原 点 0为 摄 像 机 光 心 也 即 视 点 , 世 界 坐 标 为 其 其
l
互
() 7
( , , )O ,x轴 与 0 轴 间的夹角为 y O X。 , z轴与 0 互轴间 的夹 角
【 摘 要】 首先分析了成像 系统的摄像 机成像 数学模型 , 然后研究 了 Opn L将三维物体显 示为二 维图像 的成像机理 , 此基础 上分析 了 eG 在 二 者 的 一 致 性 , 出通过 合 理 设 置 Opn L的 有 关 参 数 , 够 生 成 &4 指 eG 能 -目标 和 成 像 系统 信 息在 内的待 测 目标 高精 度 仿 真 图像 , 为研 究成 像 测 量
=
述 。空 间任 何 一 点 在 图像 中 的 成 像 位 置 可 以 用 针 孔 成 像 模 型 近 似 表 示 , 即是 线 性 成 像 模 型 。 也 如 图 1 示 , 世 界 坐 标 系 0。 y互 中建 立 由 0点 与 xz轴 组 成 所 在 , y
; ]
l
互 。
为 , y轴 与 0X。 间 的夹 角 为 0 O 。 轴 。姿 态 角 ( ,, 称 为摄 像 机 的 姿 . 0 ) y 态角 , 且 轴 为 摄 像 机 光 轴 , 直 于 图像 平 面 , 点 为 0 … 垂 交 0 点 一
的成 像 机 理 , 析 了二 者 之 间 的 区 别 及 其 内在 联 系 , 分 由此 提 出 了 一 种 基 于 O eGL的成 像 仿 真 方 法 .通 过 合 理地 设 置 O e G pn p n L参 数 使 二 者
基于OpenGL的机载图形生成算法

基于OpenGL的机载图形生成算法
常进;何援军;田海山
【期刊名称】《图学学报》
【年(卷),期】2008(029)003
【摘要】提出了基于OpenGL ES核心库的机载图形生成算法,可简洁高效地进行图形操作直至在终端屏幕上绘制出二维图形景观.研究了宽度直线、三角形的边、屏幕反走样和矢量文本显示等关键技术.宽度直线反走样实例表明算法有较好效果.电子飞行仪表绘制的实验表明图形生成算法准确高效,可以移植到专用的军工硬件平台,应用于航空图形显示等领域.
【总页数】6页(P50-55)
【作者】常进;何援军;田海山
【作者单位】上海交通大学计算机科学与工程系,上海,200240;上海交通大学计算机科学与工程系,上海,200240;上海交通大学计算机科学与工程系,上海,200240【正文语种】中文
【中图分类】TP391
【相关文献】
1.OpenGL在自然对象真实感图形生成中的应用 [J], 秦忠宝;石怀宇;何卫平;房亚东;赵锋
2.基于IFS码的分形图形生成算法研究 [J], 陶雪娇;陶薇薇
3.基于抽象工厂模式的机载显示系统图形生成技术研究 [J], 王志乐;董军宇;胡文婷
4.基于OpenGL的机载雷达仿真系统设计 [J], 田杰荣; 王述运; 胡瑞卿
5.基于马尔可夫链的分形图形生成算法 [J], 邓贞宙;赵欣;王平;洪伟毅;陶凌;余礼苏因版权原因,仅展示原文概要,查看原文内容请购买。
OpenGL三维场景模型的建立与实现
I
华 中 科 技 大 学 硕 士 学 位 论 文
Abstract
With the development of virtual reality technology, distributing vision calculating, distributing emulator and network 3d game, it is need of 3d scenery in the manner of cooperation and antagonizing. At the same time, it needs the technology of virtual scenery more perfect. For the development of the virtual scene.This article explores much about aiming at 3D scenery of constructing model and romance of 3D and real time. In the way of constructing model: using the technology of graph based OpenGL, introducing CSG finishing the construct of entity 3D model. Based on data completeness, data redundancy, operational efficiency, and scalability considerations, using an optimized data structure, to improve the system's overall performance.This atrical mainly discussed the method of 3d scenery of constructing model and romance of 3D and real time. The content related to the following aspects: the models generation terrain, topography of the transformation, 3D features of the real-time rendering methods. Use the key technologies of OpenGL, to achieve the framework of three-dimensional scene model, as well as human-computer interaction design, user-friendly and intuitive use of texture buttons increase or remove features in objects and change the world, for the input of other three-dimensional objects, the main achievement of the 3DS file object input, Finally the scene rendering techniques and the use of technology to achieve Billboard bulletin board display a large number of similar objects. Key words:OpenGL Three-dimensional object Real-Time Rendering
基于OpenGL的空间目标图像生成方法

基于OpenGL的空间目标图像生成方法
韩意;孙华燕;李迎春;樊佳
【期刊名称】《计算机仿真》
【年(卷),期】2010(027)006
【摘要】空间目标监视系统设计与目标识别算法开发需要有充足的图像源,为解决空间目标识别问题,在无法采用真实空间目标进行试验,开展仿真成像研究尤为重要,为使仿真图像体现真实空间目标成像探测系统且有探测能力,在分析OpenGL透视投影成像模型与真实成像系统的针孔成像模型之间的关系的基础上,提出了在OpenGL平台生成空间目标图像的方法与流程,通过合理设置有关参数生成目标和成像系统信息在内的仿真图像.经仿真实验证实,提高了仿真图像的真实感和可信度,并具有图像处理算法稳定性和可靠性,为空间目标成像探测系统设计和目标识别算法研究提供了数据基础.
【总页数】5页(P267-270,289)
【作者】韩意;孙华燕;李迎春;樊佳
【作者单位】装备指挥技术学院研究生院,北京,101416;装备指挥技术学院光电装备系,北京,101416;装备指挥技术学院光电装备系,北京,101416;装备指挥技术学院研究生院,北京,101416
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.一种基于OPENGL的立体图像生成技术研究 [J], 程磊;刘海艳
2.基于OpenGL的舰船目标红外图像生成 [J], 娄树理;董言治;周晓东
3.基于 OpenGL 的空间目标监视雷达三维显示系统 [J], 沈静波;刘扬
4.基于OpenGL的空间目标图像序列仿真 [J], 高腾飞;曾朝阳;郝刚涛;吴止锾
5.基于OpenGL的空间目标观测可视化仿真 [J], 陈文彤;刘朝军;陈曾平
因版权原因,仅展示原文概要,查看原文内容请购买。
opengl 面片绘制原理

opengl 面片绘制原理
OpenGL中的面片绘制原理可以概括为以下几个步骤:
1. 顶点数据准备:首先,需要准备顶点数据。
这些数据可以是3D模型的顶点坐标、颜色、纹理坐标等。
这些顶点数据将被送入GPU进行后续处理。
2. 图元定义:在OpenGL中,图元是通过顶点定义的一组形状,例如点、线段、三角形等。
这些图元定义了将要渲染的几何形状。
3. 图元装配:在这一步,GPU将图元装配在一起,形成完整的3D模型。
这个过程包括顶点合并、三角形生成等操作。
4. 光栅化:光栅化是将几何形状转换为像素的过程。
在这个过程中,GPU 会计算每个像素的颜色值,使得3D模型在屏幕上显示得更加平滑。
5. 片段处理:在光栅化之后,每个像素被称为一个片段。
在这个阶段,GPU 会对每个片段进行各种处理,例如深度测试、模板测试、颜色混合等,以确保最终的渲染效果符合预期。
6. 输出图像:最后,经过处理的片段会被送入帧缓冲区,形成最终的图像。
这个图像随后可以被显示在屏幕上,或者保存为图像文件。
总的来说,OpenGL的面片绘制原理就是通过一系列的图形处理步骤,将3D模型转换为屏幕上显示的2D图像。
这个过程涉及到许多复杂的计算和优化技术,以保证高效的渲染和良好的视觉效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
formation were generated.It Can improve the reality and the fidelity of simulated images,checkout and enhsllce the stability and reliability of image processing algorithms,and provide data base for the design of space object imaging detection systems and the research of target identification algorithms. KEYWORDS:Image simulation;Space object;Perspective imaging;Pinhole imaging
OpenGL透视投影成像模型可用公式表达为: s·[髫。扎l r=FPRT·[置yI zI E]7 (1) 式中s为比例因子,F为视口变换矩阵,通过调用Efi数 glViewport产生;P为透视投影变换矩阵,通过调用函数gf- Frustum产生;R为依次绕龙、y、:三轴旋转a猡、',角的旋转变
换矩阵,通过调用函数鲥渤触产生;T为从原点平移至(t,
l 引言 以图像为主要研究对象的光电成像探测与识别技术是
获得空间目标特征信息的重要技术途径…。空间目标提取 与目标识别算法的研究依赖于大量的真实图像源,但由于技 术等因素的制约在现有条件下无法用真实空间目标进行试 验,这就使得算法的适用范围与可靠性难以得到充分检 验心]。因此,利用仿真技术开展空间目标成像与识别成为解 决这一问题的关键技术途径。
ABSTRACT:The design of space—based surveillance systems and the research of target identification algorithms need enough space object images.However nowadays it is impossible to do experiments factually by using real satel— IRes.So it has been very important to utilize imaging simulation technology.To solve this problem and make the sire· ulated images contain the detection performance of real optical imaging systems,the relationship between OpenGL im- aging model and the pinhole imaging model of real imaging system was researched based on the analysis of the per- spective imasing model of OpenGL,then a method of space object imaging simulation Was put forward.By setting
如图1所示,设世界坐标为[置一zl E]r的三维
模型上的某一点口经过旋转平移变换,得到该点在摄像机坐 标系中的坐标[以儿乙埘。r,再经过透视投影变换执行 裁剪操作,得到像平面上二维投影点坐标[%yp却]7,之 后经过透视投影除法生成归一化的设备坐标[幻n 1]r, 最后经过视口变换得到该点在屏幕上的对应像素坐标(扎, y。)。
L,£)的平移矩阵,通过调用函数glTranslate产生。各矩阵 表达式如图l所示。
田1 OpenGL透视投影成像过程
2Z。/(坼一≈)
0
(菇,+髫f)/(墨,一茗f)
O
O
2zv(r,一扎) (儿+Yb)/(儿一Y6)
0
P=
(2)
O
O
(Z。+刁)/(五一zf) 2Znz一0z。一z/)
O
O
一l
O
l O0 t
于世界坐标系的方位决定,且有M2=R’Tt。各矩阵表达式分
别为:
、}fdX 0 uo ol
肘l=1 0 flaY‰0 l
(6)
L0
0
l OJ
1 0 0 Dl
0 1 0 D2 r=
0 0 1 D3
(7)
O0 0 1
COS卢’C08 7’
—C08 13’sin',7
sin∥
8in a’sin芦7COt;y’+COl a’sin 7’
小一致,需要设置远、近剪裁面距0点的距离分别为zf=,、 厄---fo设近剪裁面的中心点在图像坐标系下的像素坐标为
一sin a’sin卢’sin y’+C08 a’COS 7’ 一sin a’C08∥
R’=
一嘲t'v’sin卢’c08 7’+sin a’sin y’
COS a’sin卢’sin 7’+sin a’COS’,’
咖口’COS卢’
(8)
O
O
0
3.2 OpenGL与针孔成像模型的关系 首先设置OpenGL的平移矩阵和旋转矩阵,令R=R’,T
3.1针孔成像模型 图3为现实世界中真实成像系统的针孔成像模
圈2 OpenGL透视投影视锥体 ··——268.-——
万方数据
世界坐标系
,
z
—l
.,
:~~...多,匕 01 Ⅳ|t
//k Z
∥’’
图像!§标系
,
一 ,
.’
y
,,
/
圈3真实成像系统的针孔成像模型
型【10-111。成像过程中涉及三个坐标系即世界坐标系
F=[卵Ii/2
sc,三0/2
s c r Xy/:2+ ,mbo;],r=
O O
l O
00 1£
(3)
0O0 l
COS卢COfl y
—C08 8sin7
sin卢
R=
sin ctsin肛os y+C08 trsin y
一sin asin卢sin 7+CO¥acos 7 一sin acog口
(4)
—C08 asin肛os y+sin etsin y C09 asin肛in y+sin aC08 y
致的。由此可以得出结论:通过合理设置OpenGL的有关参 数,能够仿真出成像系统所观察到的待测目标图像‘121。
=r,则有:
M=坞
(9)
对于真实成像系统,设其光学系统焦距为工面阵像探测
4基于OpenGL的成像仿真方法 通过上述分析,提出的成像仿真方法为:首先建立目标
器(CCD)成像平面的物理宽高为z。×z,,每个像素的物理尺 三维模型,然后利用0penGL仿真生成理想的目标图像,再对
(0,置r互)、相机坐标系(Oxyz)、图像坐标系(物理坐标系 0l—XY与像素坐标系0。一聊)。
设坐标系O 7,x’。r。Z’,与0,置t zI重合,将D’,x7,y,,∥, 分别绕世界坐标系的xyz轴旋转口’、卢7、7’角、再平移到世界
坐标为(D,,D2,口,)的点0后得到相机坐标系Oxyz。Oz轴 为相机光轴,垂直于图像平面且交点为0。,00。=厂为成像系
.--——267...——
系统的探测能力。 本文在研究OpenGL成像模型的基础上,分析了其与真
实成像探测系统针孔成像模型的区别及内在联系,提出了一 种基于OpenGL的空间目标图像生成方法,通过设置OpenGL 有关参数使二者的成像模璎保持一致,并仿真了噪声、模糊 等效果,最终生成了包含目标和真实成像系统信息在内的二 维图像,能够为空间目标成像探测系统设计与目标识别算法 的研究提供数据基础。
COIl crcofl卢
0
0
0
式中scrX和scrY分别为屏幕显示区域的宽和高,(me,no)为 显示区域左下角点的坐标,这些参数以像素为单位。如图2
3 OpenGL成像与针孔成像模型的关系分析
所示,乙和乃分别是观察点到OpenGL透视投影视锥体的近 裁剪面和远裁剪面的距离,(毛,y5,Z。)、(4,儿,Zn)分别为近 裁剪平面左下角和右上角的坐标。
寸为dX×dY,水平和垂直方向上的像素数目分别为lJdX、 图像添加噪声、模糊和畸变效果,仿真实际成像过程。
Z,肘y,则有uo=1./2dX,f70=ly/2dYo设像探测器距离场景中 各目标的距离的最大值为r。
4.1目标三维建模 一般来说,要构建一个复杂目标的三维模型,使用Opt.-
为保证仿真图像的分辨率与真实成像结果的分辨率大 GL基本的绘图语句工作量会非常大。3DS MAX和Creator
统焦距。在图像坐标系中,每一个像素在x轴与l,轴方向上
的世界坐标系的坐标为(置,L,互),其对应像点像素
坐标为(",口),则有: s’·[“”1]’=M。坞·[置E互E]r
。
(5)
式中s’为比例因子。矩阵M为内部参数矩阵,其只与 摄像机内部参数有关,坞为外部参数矩阵,其由摄像机相对
收稿Et期:2009一04—18修回日期:2009一05—16
万方数据
文献[3—5]等主要考虑了目标远距离成像的情况,将卫 星视为点目标,没有考虑如何生成近距离情况下的目标图 像、从而根据目标几何特征对日标进行识别。文献[6—7]等 建立了卫星运行ⅡJ视化仿真软件,但都属于三维视景层面上 的仿真,侧重于目标模型和场景的视觉表现,没有对光电探 测系统成像的具体过程进行研究。三维町视化编程工具 OpenGL作为开发交互式二维和三维图形应用程序的最佳环 境之一,具有模型绘制、模型观察、光照应用、纹理映射、实时 动画等功能,在目标可视化仿真中得到大量应用【s4’。但其 绘制和显示三维图形过程中涉及到的参数、矩阵与光学成像 系统的内外部参数并没有直接联系。另外,OpenGL仿真图 像注重的是视觉效果与真实感,而不是体现出真实成像探测