气动系统基本回路
气动系统基本回路
路 中位封闭式
活塞杆伸出
气动系统基本回路
换向控制回路 ——双作用气缸换向回路
• 采用三位五通阀的换向控制回
路 中位封闭式
活塞杆缩回
气动系统基本回路
换向控制回路 ——双作用气缸换向回路
A1
A2
• 采用三位五通阀的换向控制回
路
中位加压式
中位时进气口与 两个出气口同时相通, 因活塞两端作用面积不相等, 故活塞杆仍然会向前伸出
微雾分离器
电气比例阀
先导式减压阀
气动系统基本回路
位置控制回路
气动系统基本回路
位置控制回路 ——多位气缸
•利用双位气缸,可以实现多达 三个定位点的位置控制
A
SD1 SD2 气 缸 行 程
-
-
0
+
-
++
A SD1
B
气动系统基本回路
B SD2
位置控制回路 ——多位气缸
•利用双位气缸,可以实现多达 三个定位点的位置控制
•电磁铁失电,由减压阀控制气缸 以较低压力返回
气动系统基本回路
压力(力)控制回路 ——多级压力控制回路
P1
•在一些场合,需要根据工件
重量的不同,设定低、中、
高三种平衡压力
P2
P3
先导式减压阀
气动基本回路(课堂PPT)
五、缓冲回路
❖ 要获得气缸行程末端的缓冲,除采用带缓冲的气缸外,特 别在行程长、速度快、惯性大的情况下,往往需要采用缓冲 回路来满足气缸运动速度的要求。
b)所示回路的特点是, 当活塞返回到行程末端时, 其左腔压力已降至打不开 顺序阀2的程度,余气只 能经节流阀1排出,因此 活塞得到缓冲。
a)所示回路能实现快进一慢进缓冲一停止快
图14-2双作用气缸换向回路
10
(三)往复动作回路
1.单往复动作回路
双气控阀的双稳态记忆功能
11
2.连续往复动作回路
12
(四)多工位控制回路
工位一:阀1控制, 右气缸杆缩回,左气缸杆缩回
工位二:阀2控制, 右气缸杆伸出,左气缸杆缩回
工位三:阀3控制, 右气缸杆伸出,左气缸杆伸出
13
三位控制回路
图14-1a单作用气缸换向回路
6
(二)双作用气缸的换向回路 ❖ 图14-1b所示为三位四通电 磁阀控制的单作用气缸上、 下和停止的回路,该阀在两 电磁铁均失电时能自动对中, 使气缸停于任何位置,但 定位精度不高,且定位时
间不长(可压缩性,泄 漏)。
图14-1b单作用气缸换向回路
7
图14-2a为简单的换向回路
图14-2b中当A有压缩空气时 气缸推出,反之,气缸退回
图14-2c中当手动按钮压 下时气缸推出,反之,气 缸退回
气压传动基本回路(飞机液压与气压传动课件)
缓冲回路
速度控制回路
3.气液联动速度控制回路 如图所示。该回路利用气液转 换器1和2将气压转换成液压, 通过液压油驱动液压缸3 运动, 从而获得平稳的运动速度。分 别调节液压缸进出油路上的两 个节流阀,即可以改变活塞杆 伸出和缩回两个方向的运动速 度。在选用气液转换器时,一 般应使其储油量大于液压缸 3 容积的1.5倍,同时应注意气、 油间的密封,避免气油互串。
气压传动基本回路概述
气压传动基本回路是由一些气动元件组成, 并且能够完成气动系统的某一特定的功能。 气动基本回路主要有压力控制回路、速度控 制回路和方向控制回路等。
方向控制回路
1 单作用气缸换向回路
图所示为单作用气缸换向回 路。图a为由二位三通电磁换向 阀控制的换向回路。当换向阀电 磁铁通电时,活塞杆在气压作用 下伸出,而断电时换向阀复位, 活塞杆在弹簧力的作用下缩回。 图b为由三位五通电磁阀控制的 换向回路。他与前者不同的是, 它能在换向阀两侧电磁铁均为断 电,即中位工作时,使气缸停留 在任意位置。但由于气体的可压 缩性,活塞的定位精度不高,而 且停止时间不能过长。
a)
b)
双作用气缸单向调速回路
a)进口节流调速回路
b)出口节流调速回路
速度控制回路
2.缓冲回路 如图所示, 当活塞向右伸出时,气缸左 端进气,右端排气通过机控 换向阀再经三位五通阀排出; 当活塞向右运动到接近行程 末端时,活塞压下了机控换 向阀,切断了机控换向阀到 三位五通阀的排气通路,气 缸右端排气只能通过节流阀 再经三位五通阀排出,起到 活塞行程末端缓冲变速的作 用。改变机控换向阀的安装 位置,即可以改变缓冲的开 始时刻,以达到良好的缓冲 效果。
气控系统基本元件和基本回路
▪ 机械控制换向阀 ▪ 人力控制换向阀
▪单向阀
▪梭阀:两个单向阀的组合,相当于
“或门”。
▪快速排气阀
产品图片
基本回路与常用回路
►气动基本回路
▪ 压力和力控制回路 ▪ 换向回路 ▪ 速度控制回路 ▪ 位置控制回路 ▪ 基本逻辑回路
▪ 气动常用回路
▪ 安全保护回路 ▪ 同步动作回路 ▪ 往复动作回路 ▪ 记数回路 ▪ 振荡回路
▪ 压力控制阀
▪ 减压阀—气动三大件之一,用于 稳定用气压力。
▪ 溢流阀—作安全阀用。 ▪ 顺序阀—由于气缸(马达)的软
特性,很难用顺序阀实现两个执 行元件的顺序动作。
流量控制阀
▪ 节流阀 ▪ 单向节流阀 ▪ 排气节流阀
方向控制阀:
换向阀 ▪ 气压控制换向阀(加压控制、
泄压控制、差压控制)
▪ 电磁控制换向阀,电、气控
气压系统基本组成
▪ 气源装置——压缩空气的发生装置以及压缩空气的 存贮、净化的辅助装置。【空压机、储气罐】
▪ 执行元件——将气体压力能转换成机械能并完成做 功动作的元件,如气缸、气马达。
▪ 控制元件——控制气体压力、流量及运动方向的元 件,如各种阀类;能完成一定逻辑功能的元件,即 气动逻辑元件等。
▪ 气动辅件——气动系统中的辅助元件,如消声器、 管道、接头等。
通过控制电磁阀的 通电个数,实现对 分段式活塞缸的活 塞杆输出推力的控 制。
气动基本回路最全的
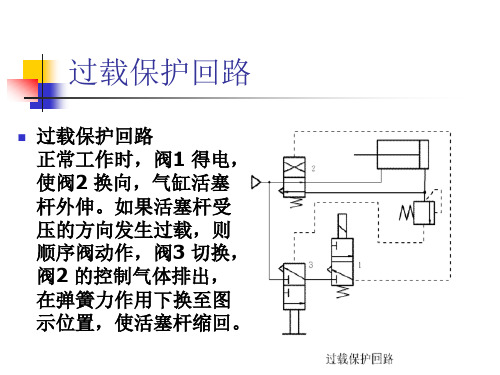
过载保护回路 正常工作时,阀1 得电, 使阀2 换向,气缸活塞 杆外伸。如果活塞杆受 压的方向发生过载,则 顺序阀动作,阀3 切换, 阀2 的控制气体排出, 在弹簧力作用下换至图 示位置,使活塞杆缩回。
力控制回路
气动系统一般压力较低,所以往往是通过改变执 行元件的受力面积来增加输出力。
连续往复动作回路
▪ 连续往复动作回路 手动阀1 换向,高 压气体经阀3 使阀 2换向,气缸活塞 杆外伸,阀3 复位, 活塞杆挡块压下行 程阀4 时,阀2 换 至左位,活塞杆缩 回,阀4 复位,当 活塞杆缩回压下行 程阀3 时,阀2 再 次换向,如此循环 往复。
换向回路
▪ 单作用气缸换向回路 用三位五通换向阀可控制单 作用气缸伸、缩、任意位置停止。
换向回路
▪ 双作用气缸换向回路 用三位五通换向阀除控制 双作用缸伸、缩换向外,还可实现任意位置停止。
速度控制回路
▪ 气阀调速回路 ▪ 单作用气缸调速回路 用两个单向节流阀分别控制活塞杆的
升降速度。
速度控制回路
▪ 单作用气缸快速返回回路活塞返回时,气缸下腔通
过快速排气阀排气。wenku.baidu.com
气液联动速度控制回路
▪ 串联调速回路 通过两个单向节流阀, 利用液压油不可压缩 的特点,实现两个方 向的无级调速,油杯 为补充漏油而设。
▪ 气液缸串联变速回路 当活塞杆右行到撞块A 碰到机动换向阀后开始 作慢速运动。改变撞块 的安装位置,即可改变 开始变速的位置。
气动基本回路
气动程序控制回路:应用实例一
一台切割机,工作循环 要求:脚踏开关一次则 完成一次切割动作(铡 刀切下—返回),为保 证切断工件,铡刀必须 在切断位置停留数秒。 另外要求切割速度可以 调节以及为避免事故, 工作之前需盖防护罩。
气动程序控制回路:切割机实例分析
该设备组成-执行元件:双作用气缸A控制铡刀(回路图 中元件命名方法); 执行元件初始状态:A伸出、A+ 执行元件工作过程:A-、A+,如何描述?
2、气动常用回路
12、带行程检测的压力控制回路
如图12-21所示回路,按下按钮阀1S1,主控阀1V1换向,活塞前进,当活塞杆碰到行 程阀1S2时,如活塞腔气压达到顺序阀的调定压力时,则打开顺序阀1V2,压缩空气经过 顺序阀1V2、行程阀1S2使主阀1V1复位,活塞后退。这种控制回路可以保证活塞到达行 程终点且活塞腔压力达到预定压力值时,活塞才后退。
2、气动常用回路
4、利用双压阀的控制
最常用的双手操 作回路还有如图12-12 所示的回路 ,常用于 安全保护回路。
2、气动常用回路
5、单作用气缸的速度控制
如图12-13为利用单向节流 阀控制单作用气缸活塞速度的 回路。单作用气缸前进速度的 控制只能用入口节流方式,如 图12-13(a)所示。单作用气 缸后退速度的控制只能用出口 节流方式,如图12-13(b)。 如果单作用气缸前进及后退速 度都需要控制,则可以同时采 用两个节流阀控制,回路如图 12-13(c)所示。活塞前进时 由节流阀1V1控制速度,活塞 后退时由节流阀1V2控制速度。
第一节 气动基本回路
1
图13-1 一次压力控制回路
1.溢流阀 2.点触点压力表
张家界航院
8.1 气动基本回路
2)二次压力控制回路 二次压力控制回路的主要作用是控制气动系统的气源压力, 如图8-2所示,调节减压阀就可得到所需的工作压力。
1
图13-2 二次压力控制回路
1. 减压阀
张家界航院
8.1 气动基本回路
3)高低压转换回路 利用两只减压阀和换向阀间或输出低压或高压气源。
张家界航院
8.1 气动基本回路
4)气-液联动回路 (1)采用气-液转换器的速度 控制回路 图8-9所示为采用气—液转换 器的速度控制回路,它利用气-液 转换器1和2将气体压力变成液体 的压力,利用液压油驱动液压缸3 运动,从而得到平稳且容易控制 的活塞的运动速度。单向节流阀 用来改变活塞的运动速度。该回 路充分发挥了气动供气方便和液 压速度容易控制的特点,但气、 油之间密封性要好,以防止空气 混入液压油,从而保证运动速度 的平稳。
3)互锁回路
在该回路中 ,四通阀的 换向受三个 串联的机动 三通阀控制 ,只有三个 机动阀都接 通,主换向 阀才能换向 。
张家界航院
8.1 气动基本回路
张家界航院
8.1 气动基本回路
张家界航院
或
1
2
由减压阀控制输出高低压力
由
阀控制输出高低压力
气动控制基本回路
气缸速度受外界负载变化影响小的特点,所以应用较普遍
双向调速回路
双作用气缸的速度控制回路 图17-28
缓冲回路
功能: 可降低或避免气缸行程末端活塞与缸体的撞击。 场合: 在行程长、速度快、惯性大的场合,除采用缓冲气缸外,
一般还采用缓冲回路
缓冲回路 图17-29
非门:S=à 禁门:S=÷B
A P(B)
双稳元件:记忆
滑块
A
P
双稳元件 图17-36
延时回路
延时输出和延时切换
延时回路 图17-37
过载保护回路
过载保护回路 图17-38
互锁回路
互锁回路 图17-39
双手同时操作回路
使用两个启动用 的手动阀,只有同 时按动两个阀才动 作的回路。 主要为了安全。 在锻造、冲压机械 上常用来避免误操 作,以保护操作者 的安全。
液压缸缓冲原理及结构
液压传动
方向阀与方向控制回路
单向阀、换向阀的图形符号、工作原理、结构 换向阀的中位机能 方向控制回路:锁紧回路、换向回路
液压传动
压力阀与压力控制回路
溢流阀、减压阀、顺序阀的图形符号、工作原理、结 构、功能、应用、区别、计算 调压回路、减压回路、压力控制顺序动作回路 卸荷回路 平衡回路
一次压力控制回路 图17-19
第十章 气动系统基本回路讲解
液压与气动技术--气动系统基本回路
二、增压回路
液压与气动技术--气动系统基本回路
第三节 速度控制回路
一、节流调速回路 1.采用单向节流阀实
现排气节流的速度控 制回路。
液压与气动技术--气动系统基本回路
一、双控换向回路
采用有记忆作用的双控换向阀的换向回路
液压与气动技术--气动系统基本回路
三、差动控制回路
差动控制是指气缸的无杆腔进气活塞杆 伸出时,有杆腔的排气又回到进气端的 无杆腔。
差动控制回路 1-手拉阀;2-差动缸
液压与气动技术--气动系统基本回路
第二节 压力控制回路
液压与气动技术--气动系统基本回路
一、节流调速回路
2.采用双向节流阀实现排气节流的速度控 制回路。
液压与气动技术--气动系统基本回路
二、缓冲回路
获得气缸行程末端的缓冲,除采用带缓冲的气缸外,在行程长、 速度快、惯性大的情况下,往往需要采用缓冲回路来满足气缸运 动速度的要求。
液压与气动技术--气动系统基本回路
液压与气动技术--气动系统基本回路
第十章 气动系统基本回路
了解气动系统常用回路的类型和 功能,合理选择各种气动元件并 根据其功能组合成气动回路,实 现预定的方向控制、压力控制和 位置控制等功能。
液压与气压传动气动基本回路

二、多缸顺序动作回路(两只以上气缸按一定顺序动作的回路。 在一个循环顺序里,若气缸只作一次往复,称为单往复顺序。
若某些气缸作多次往复,就称为多往复顺序。 ☺若用A、B表示气缸,仍用下标1、0表示活塞的伸出和缩回,两 只气缸的基本顺序动作有A1B0A0B1、A1B1B0A0和A1A0B1B0三种。 ☺若三只气缸的基本动作,有十五种之多,如A1B1C1A0B0C0、 A1A0B1C1C0B0、A1A0B1C1B0C0、A1B1C1A0C0B0、……等等。这 些顺序动作回路,都属于单往复顺序。即在每一个程序里,气缸 只作一次往复,多往复顺序动作回路,其顺序的形成方式,将比 单往复顺序多得多。在程序控制系统中,把这些顺序动作回路, 都叫做程序控制回路。
五、缓冲回路
要获得气缸行程末端的缓冲,除采用
带缓冲的气缸外,特别在行程长、速度快、
惯性大的情况下,往往需要采用缓冲回路
来满足气缸运动速度的要求。图14-7利用 行程阀(a图)或顺序阀(b图)来实现。
图14-6速度换接回路
§14.3压力控制回路 功用:是使系统保持在某一规定的压力范围内。常用的有一次压 力控制回路,二次压力控制回路和高低压转换回路。 一、一次压力控制回路
图14-16过载保护回路
二、互锁回路 图14-17是互锁回路,在该回路中,四通阀的换向受三个串
联的机动三通阀控制,只有三个都接通,主控阀才能换向。
气动基本回路

气液动控制技术
&
(a)二位运动控制;(b)三位运动控制 图1.8 单作用气缸换向回路
&
图1.9 双作用气缸换向回路
&
图1.10 过载保护回路
&
图1.11 气压降低保护回路
&
图1.12 互锁回路
&
图1.13 与逻辑控制回路
&
图1.14 或逻辑控制回路
&
图1.15 刚性连接的同步回路 图1.16 气-液转换的同步回路
气液动控制技术
气动基本ቤተ መጻሕፍቲ ባይዱ路
1-溢流阀、2-压力表 图1.1 一次压力控制回路
&
图1.2 二次压力控制回路
&
图1.3 单作用气缸速度控制回路
&
(a)单向节流阀调速;(b)排气节流阀调速 图1.4 双作用气缸速度控制回路
&
图1.5 快速往复动作回路
&
图1.6 速度换接回路
&
(a)行程阀的缓冲回路;(b)快速排气阀、顺序阀和节流阀的缓冲回路 图1.7 缓冲回路
气动基本回路 气动常用回路
气动基本回路气动常用回路
气动基本回路是指通过气动元件和管路构成的气动系统中的基本回路。气动常用回路是指在工业自动化控制系统中经常使用的一些气动回路。本文将介绍气动基本回路和气动常用回路的一些概念和应用。
气动基本回路主要包括气源回路、执行回路和控制回路。气源回路是指气动系统中提供压缩空气的部分,通常包括压缩空气发生器、气源处理装置和储气设备。执行回路是指通过气动执行元件来实现机械运动的部分,通常包括气缸和气动执行阀等。控制回路是指用来控制执行元件的控制系统,通常包括开关、传感器和控制阀等。气动常用回路包括单向气缸回路、双向气缸回路、速度控制回路、位置控制回路、压力控制回路等。单向气缸回路是指通过一个气缸来实现单个工作机构的运动控制,常用于一些简单的工作场合。双向气缸回路是指通过两个气缸来实现工作机构的正反转运动控制,常用于一些需要双向运动的工作场合。
速度控制回路是通过调节气缸的进气量来实现对气缸运动速度的控制,常用于一些对速度要求较高的工作场合。位置控制回路是通过使用位置传感器来检测工作机构的位置,并通过控制阀来调节气缸的进气量,从而实现对工作机构位置的控制。压力控制回路是通过使用压力传感器来检测气缸的压力,并通过控制阀来调节气缸的进气量,从而实现对气缸压力的控制。
气动基本回路和气动常用回路在工业自动化控制系统中具有广泛的应用。其优点包括响应速度快、动力强、结构简单、成本低廉等。因此,在许多工业领域中,气动系统被广泛应用于各种自动化生产线、机械设备和工艺控制系统中。
气动基本回路和气动常用回路是工业自动化控制系统中常用的回路类型。通过对气源回路、执行回路和控制回路的合理设计和配置,可以实现对工作机构的运动控制、速度控制、位置控制和压力控制等功能。气动系统具有快速响应、动力强大、结构简单、成本低廉等优点,因此在工业领域中具有广泛的应用前景。
气动基本回路的原理和应用
双手操作回路
只有同时按下两个启动用手 动换向阀,气缸才动作,对 操作人员的手起到安全保护 作用。应用在冲床、锻压机 床上。
互锁回路
该回路利用梭阀1、2、3 和 换向阀4、5、6 实现互锁, 防止各缸活塞同时动作,保 证只有一个活塞动作。
同步动作回路
简单的同步回路
采用刚性零件把两尺寸相同 的气缸的活塞杆连接起来。
速度控制回路
气液联动速度控制回路 由于气体的可压缩性,运动速度不稳定,定位精度不高。在气动调速、定位不能满足要求 的场合,可采用气液联动。
气液缸并联且有中间位置停止的变速回路 气缸活塞杆端滑块空套在液压阻尼缸活 塞杆上,当气缸运动到调节螺母 6 处时, 气缸由快进转为慢进。液压阻尼缸流量 由单向节流阀2 控制,蓄能器能调节阻 尼缸中油量的变化。
连续往复动作回路
手动阀1 换向,高压气体经阀3 使阀2 换向,气缸活塞杆外伸,阀3 复位,活 塞杆挡块压下行程阀4 时,阀2 换至左 位,活塞杆缩回,阀4 复位,当活塞杆 缩回压下行程阀3 时,阀2 再次换向, 如此循环往复。
计数回路
由气动逻辑元件组成的一位二进制计数回路
设原始状态双稳SW1的“0”端有输出 s0,”1”端无输出。其输出反馈使禁门 J1有输出,J2无输出。因此,双稳SW2 的“1”端有输出,“0”端无输出。当有脉 冲信号输入给与门时,y1有输出并切换 SW1至“1”端,使s1有输出。当下一个 脉冲信号输入时,又使SW1呈现s0输出 状态,就这样使SW1交替输出,起到分 频计数的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
换向控制回路
——双作用气缸换向回路
• 采用二位五通阀的换向控制回
路 使用双电控阀具有记忆功能, 电磁阀失电时,气缸仍能保持在 原有的工作状态
得电
换向控制回路
——双作用气缸换向回路
电磁阀仍然 保持在失电前 的位置, 因此气缸始终 处于伸出状态
• 采用二位五通阀的换向控制回
路 使用双电控阀具有记忆功能, 电磁阀失电时,气缸仍能保持在 原有的工作状态
——入口节流和出口节流
入口节流
易产生低速爬行 没有比例关系 对调速特性有影响 小 小 大 小
出口节流
好 有比例关系 对调速特性影响很小 与负载率成正比 大 约等于平均速度 大
速度控制回路
——高速驱动回路
•利用快速排气阀,减少排气 背压,实现高速驱动
速度控制回路
——双速驱动回路
• 利用高低速两个节流阀实现 高低速切换
P≤Ps
Ps
压力(力)控制回路
——工作压力控制回路
•为保持稳定的性能,应提供 给系统一种稳定的工作压力, 该压力设定是通过三联件 (F.R.L)来实现的
压力(力)控制回路
——双压驱动回路
•在气动系统中,有时需要提 供两种不同的压力,来驱动 双作用气缸在不同方向上的 运动
•采用减压阀的双压驱动回路
——双作用气缸换向回路
• 采用三位五通阀的换向控制回
路 中位封闭式
活塞杆伸出
换向控制回路
——双作用气缸换向回路
• 采用三位五通阀的换向控制回
路 中位封闭式
活塞杆缩回
换向控制回路
——双作用气缸换向回路
A1
A2
• 采用三位五通阀的换向控制回
路 中位加压式
中位时进气口与 两个出气口同时相通, 因活塞两端作用面积不相等, 故活塞杆仍然会向前伸出
——多位气缸
•利用双位气缸,可以实现多达 三个定位点的位置控制
SD1 + + SD2 +
A B
气缸行程 0 A B
SD1
SD2
位置控制回路
——多位气缸
•利用双位气缸,可以实现多达 三个定位点的位置控制
SD1 + + SD2 +
A B
气缸行程 0 A B
SD1
SD2
位置控制回路
——多位气缸
•利用双位气缸,可以实现多达 三个定位点的位置控制
SD1 + + SD2 +
A B
气缸行程 0 A B
SD1
SD2
位置控制回路
——制动气缸
•利用制动气缸,可以实现中间 定位控制
• 二位三通电磁阀SD3失电,制 动气缸缩紧制动;得电,制动 解除
SD1
SD2
SD3
速度控制回路
速度控制回路
特性
低速平稳性 阀的开度与速度 惯性的影响 起动延时 起动加速度 行程终点速度 缓冲能力
SD1
S1
低速
速度控制回路
——双速驱动回路
• 利用高低速两个节流阀实现 高低速切换
• 图中节流阀S1调节为高速,节流阀S2调节 为低速
SD2 S2
SD1 + +
SD2 +
气缸速度 0 低速 高速
SD1
S1
高速
同步控制回路
同步控制回路
——节流阀同步回路
• 利用节流阀使流入和流出执 行机构的流量保持一致
12 2 10 3 1 2 10 3 1
Y
12
1
1
0
1
0
1
X
“与”回路
Z
X 0 0 Y 0 1 Z 0 0
12 2 1 2 10 3 1 10
Y
3
1
1
0
1
0
1
12
X
“与”回路
Z
X 0 0 Y 0 1 Z 0 0
12 2 10 3 1 2 10 1
Y
12
1
1
0
1
0
1
X
3
“与”回路
Z
X 0 0 Y 0 1 Z 0 0
12 2 1 2 10 1 10
Y
3
1
1
0
1
0
1
12
X
3
“非”回 路
X
Z
Z
12 2 10 1 3
0
1
1
0
X
“非”回 路
X
Z
Z
12 2 3 10
0
1
1
0
X
1
“或”回 路
Z
X 0 0 1 1 Y 0 1 0 1 Z 0 1 1 1
12 2 10 3 1 12 2 10
X
Y
3
1
“或”回 路
Z
X 0 0 1 1 Y 0 1 0 1 Z 0 1 1 1
同步控制回路
——机械连接的同步回路
• 气缸的活塞杆通过齿轮齿条 机构连接起来,实现同步动 作
齿轮齿条机构
同步控制回路
——气液转换缸的同步回路
气液转换缸
利用两个气液缸 实现同步动作
同步控制回路
——气液转换缸的同步回路
气液转换缸
利用两个气液缸 实现同步动作
气动逻辑回路
“与”回路
Z
X 0 0 Y 0 1 Z 0 0
换向控制回路
——单作用气缸换向回路
• 回路的初始由三通阀的弹簧控
制阀处于常闭状态 电磁阀得电,三通阀换向,单 作用气缸活塞杆向前伸出 电磁阀失电,三通阀回到初始 状态,单作用气缸活塞杆在弹簧 作用下退回
换向控制回路
——双作用气缸换向回路
• 采用二位五通阀的换向控制回
路 使用双电控阀具有记忆功能, 电磁阀失电时,气缸仍能保持在 原有的工作状态
失电
换向控制回路
——双作用气缸换向回路
• 采用三位五通阀的换向控制回
路 三种三位机能 • 中位封闭式 • 中位加压式
• 中位排气式
换向控制回路
——双作用气缸换向回路
• 采用三位五通阀的换向控制回
路 中位封闭式
能使气缸定位 在行程中间任 何位置,但因为 阀本身的泄漏, 定位精度不高
中位会有泄漏
换向控制回路
减压阀设定 较低的返 回压力
压力(力)控制回路
——双压驱动回路
•在气动系统中,有时需要提 供两种不同的压力,来驱动 双作用气缸在不同方向上的 运动
•电磁铁得电,气缸以高压伸出
压力(力)控制回路
——双压驱动回路
•在气动系统中,有时需要提 供两种不同的压力,来驱动 双作用气缸在不同方向上的 运动
•电磁铁失电,由减压阀控制气缸 以较低压力返回
其它控制回路
• 采用SSC阀来实现
——终端瞬时加压回路
P1升高
• 同样可以实现防止活塞杆高 速伸出
SSC阀,控制气缸 起动时低速伸出, 接触到工件,P1 升高,SSC阀换向, 高压驱动工件
其它控制回路
• 采用制动气缸
——落下防止回路
其它控制回路
• 采用先导式单向阀
——落下防止回路
结 束
谢谢您的ቤተ መጻሕፍቲ ባይዱ与!
其它控制回路
——缓冲回路
• 利用溢流阀产生缓冲背压
中位时气缸下腔的 压力由溢流阀 设定,产生背压
其它控制回路
——防止起动飞出回路
• 在气缸起动前使其排气侧产 生背压
采用中位加压式 电磁阀使气缸 排气侧产生背压
P P
其它控制回路
• 采用入口节流调速
——防止起动飞出回路
入口节流 调速防止 起动飞出
其它控制回路
• 采用SSC阀来实现
——终端瞬时加压回路
• 同样可以实现防止活塞杆高 速伸出
SSC阀,控制气缸 起动时低速伸出, 接触到工件后 瞬时加压
其它控制回路
• 采用SSC阀来实现
——终端瞬时加压回路
P1较低
• 同样可以实现防止活塞杆高 速伸出
SSC阀,控制气缸 起动时低速伸出, 接触到工件
SMC气动培训教程
气动系统基本回路
• SMC(中国)有限公司 上海分公司
基本回路分类
1.换向控制回路
2.压力(力)控制回路
5.同步控制回路
6.气动逻辑回路
3.位置控制回路
4.速度控制回路
7.其它控制回路
换向控制回路
换向控制回路
——单作用气缸换向回路
• 回路的初始由三通阀的弹簧控
制阀处于常闭状态 电磁阀得电,三通阀换向,单 作用气缸活塞杆向前伸出 电磁阀失电,三通阀回到初始 状态,单作用气缸活塞杆在弹簧 作用下退回
12 2 10 3 1 12 2 10
X
Y
3
1
“或”回 路
Z
X 0 0 1 1 Y 0 1 0 1 Z 0 1 1 1
12 2 3 1 10 12 2 10
X
Y
3
1
“或”回 路
Z
X 0 0 1 1 Y 0 1 0 1 Z 0 1 1 1
12 2 3 1 10 12 2 10
X
Y
3
1
高压
低压
其它控制回路
压力(力)控制回路
P1
——多级压力控制回路
•在一些场合,需要根据工件 重量的不同,设定低、中、 P2 高三种平衡压力
P3
先导式减压阀
压力(力)控制回路
•利用电气比例阀进行压力无 级控制,电气比例阀的入口 应该安装微雾分离器
微雾分离器
——多级压力控制回路
电气比例阀
先导式减压阀
位置控制回路
位置控制回路
换向控制回路
——双作用气缸换向回路
• 采用三位五通阀的换向控制回
路 中位排气式
中位时两个出气口 与排气口相通 气缸活塞杆可以任意推动
压力(力)控制回路
压力(力)控制回路 ——气源压力控制回路
• 气源压力控制主要是指实空压
机的输出压力保持在储气罐所允 许的额定压力以下
溢流阀控制气罐 的最大允许压力
• 图中节流阀S1调节为高速,节流阀S2调节 为低速
SD2 S2
SD1 + +
SD2 +
气缸速度 0 低速 高速
SD1
S1
低速
高速
速度控制回路
——双速驱动回路
• 利用高低速两个节流阀实现 高低速切换
• 图中节流阀S1调节为高速,节流阀S2调节 为低速
SD2 S2
SD1 + +
SD2 +
气缸速度 0 低速 高速