FANUC系统机床调试
FANUC数控系统轴设定参数的调试

FANUC数控系统轴设定参数的调试FANUC数控系统是目前工业自动化领域中使用较广泛的一种数控系统,其在机床控制系统中起到了至关重要的作用。
对于使用FANUC数控系统的机床,轴设定参数的调试是非常重要的一步。
本文将介绍FANUC数控系统轴设定参数的调试过程。
首先,为了进行轴设定参数的调试,需要对FANUC数控系统有一定的了解。
在进行参数调试之前,应该先了解轴设定参数的含义和功能。
FANUC数控系统中的轴设定参数主要包括轴号、速度、加速度、减速度、位置偏差等。
通过调整这些参数,可以对机床的运动轴进行控制,实现精准的加工。
在进行轴设定参数的调试之前,首先需要进行系统设置。
在FANUC数控系统中,通过对系统参数进行设置,可以调整机床的各项参数和控制方式。
例如,可以设置系统的坐标轴数、单位、各轴的运动方式等。
这些设置对轴设定参数的调试非常重要,因为它们会直接影响到轴的运动控制效果。
接下来,需要对各个轴的设定参数进行调试。
首先是轴号的设定。
在FANUC数控系统中,每个轴都有对应的编号,通过设置轴号,可以确定对应轴的设定参数。
例如,X轴对应轴号为1,Y轴对应轴号为2,以此类推。
然后是速度、加速度和减速度的设定。
在进行加工操作时,机床的速度和加速度对加工效果有很大的影响。
通过调整速度、加速度和减速度的设定参数,可以控制机床在加工过程中的速度和运动方式。
需要根据具体的加工要求和材料性质,合理设定这些参数。
此外,还需要调试位置偏差参数。
位置偏差是指机床运动轴在实际运动中与设定的位置之间存在的偏差。
通过调整位置偏差参数,可以实现机床轴的精确控制。
在调试时,可以采用示教器或者手动操作机床进行精调,使机床的实际运动与设定的位置尽可能接近。
最后,进行轴设定参数的测试和优化。
在设定完轴参数后,需要进行测试,观察机床的运动轨迹和加工结果是否符合要求。
如果发现运动不平稳、位置偏差过大等问题,需要进一步优化设定参数。
通过反复测试和优化,逐步调整轴设定参数,直到满足加工要求为止。
FANUC系统数控机床MDI操作面板按键的详细说明
FANUC系统数控机床MDI操作面板按键的详细说明
1.电源开关:用于启动或关闭数控机床的电源。
2.急停按钮:在紧急情况下按下此按钮将立即停止数控机床的运行。
3.重置按钮:用于重置数控系统,消除故障并恢复正常运行。
4.程序选择按钮:用于选择不同的数控程序或程序组。
5.零点设定按钮:用于设定工件的零点坐标。
6.轴选择按钮:用于选择控制的轴,可以单独控制X、Y、Z轴等。
7.手动模式按钮:切换至手动模式,手动控制机床移动。
8.进给率选择按钮:用于选择进给速度,通常为百分比。
9.速度选择按钮:用于选择运动速度,通常为百分比。
10.回零按钮:将机床回到初始零点位置。
11.MDI模式按钮:切换至MDI(手动数据输入)模式,可以手动输入指令运行。
13.停止按钮:停止当前的操作或程序运行。
14.启动按钮:启动当前选定的程序或操作。
15.保存按钮:保存当前的程序或数据。
16.开始/停止按钮:根据实际情况用于开始或停止运行机床。
17.确认按钮:确认输入的数据或指令。
18.清除按钮:清除输入的错误数据或指令。
以上是FANUC系统数控机床MDI操作面板上常见的按键及其功能。
这些按键的操作简单明了,但在实际操作中需要注意按键的正确使用方式,以免误操作导致机床故障或安全事故发生。
同时,熟练掌握这些按键的功能可以提高操作效率,提升数控机床的生产效率和质量。
希望以上内容对您有所帮助。
FANUC系统机床调试
FANUC系统调试第一章CNC数据传输操作第一节BOOT画面下的数据传输第二节通过所有I/O画面进行数据传输第二章常见报警分析第三章第四轴参数的设定第四章光栅尺参数的设定第五章刚性攻丝参数的设定第六章主轴与伺服轴参数的设定第一节主轴参数的设定第二节伺服轴参数的设定第七章K参数的设定第八章常用参数简介第九章机床外部报警信息第一章CNC数据传输操作基础知识介绍1:目前我们使用的系统可使用存储卡和USB共同操作,存储卡使用时把I/O通道参数NO 20改为4,用USB时改为172:在插入存储卡时,要注意方向,标签向右,注意插入时不要用力过大,以免损坏插针3:机床上电后输入的内容主要有:梯图、梯图参数、机床参数、所有程序,输出备份则多了一个螺补参数4:NC 的的存储区分为F-ROM,S-RAM 和D-RAM。
其中F-ROM 为非易失型存储器,系统断电后数据不丢失;S-RAM 为易失型存储器,系统断电后数据丢失,所以其数据需要用系统主板上的电池来保存;D-RAM 为动态存储器,是软件运行的区域5:常用的输入输出方法有两种a:通过BOOT 画面的备份,这种方法备份数据,备份的是SRAM 的整体,数据为二进制形式,在计算机上打不开,但此方法的优点是恢复或调试其他相同机床时可以迅速完成b:通过ALL I/O 画面对SRAM 里各个数据分别传入、备份这种方法也在系统的正常操作画面里的操作,有个专门的操作画面ALL I/O 画面,但必须是EDIT 方式才能操作,SRAM 里所有的数据都可以分别的被备份和恢复。
和第二种方法一样,输出文件的格式是文本格式,电脑也可以打开,和第一种方法不一样的地方在于可以自定义输出的文件名。
这样,一张存储卡可以备份多台系统(机床)的数据,以不同的文件名保存。
第一节BOOT画面下的数据传输BOOT 画面的进入BOOT是系统在起动时执行CNC软件建立的引导系统,作用是从F-ROM 中调用软件到D-RAM 中。
FANUC车床原点设置步骤
FANUC车床原点设置步骤步骤1:机器加电首先,将车床的电源开关切换到“ON”位置,以使车床开始供电。
确保所有的电源线都正确连接,并检查车床是否按照正确的程序进行加电。
步骤2:进入参数设置模式按下车床控制面板上的“参数”按钮,进入参数设置模式。
在此模式中,您可以更改和调整各种车床参数。
步骤3:选择“系统”参数在参数设置模式下,使用方向键选择“系统”参数。
这些参数控制着整个车床系统的行为和设置。
步骤4:进入“机床坐标系设置”在“系统”参数下,使用方向键选择“机床坐标系设置”选项。
这个选项允许您设置车床的坐标系。
步骤5:选择“原点位置设置”在“机床坐标系设置”下,使用方向键选择“原点位置设置”选项。
这个选项允许您设置车床的原点位置。
步骤6:选择“原点设定”在“原点位置设置”下,使用方向键选择“原点设定”选项。
这一步骤将允许您在车床上设置原点位置。
步骤7:手动移动车床按下车床控制面板上的手动操作按钮,使车床进入手动操作模式。
使用手动操作按钮或手动操作面板上的手动操作杆,手动移动车床,将刀具或夹具移动到您希望设置为原点的位置。
步骤8:设置X、Y和Z轴的原点位置使用车床控制面板上的坐标系设定按钮,将车床的移动轴调整为您需要设置的X轴、Y轴和Z轴的原点位置。
确保每个轴都正确地调整到您希望的位置。
步骤9:确认原点位置按下车床控制面板上的“确认”按钮,以确认您设置的原点位置。
系统将会存储这些位置并进行后续的坐标计算和运动。
步骤10:退出参数设置模式在确认完原点位置后,按下车床控制面板上的“EXIT”按钮,以退出参数设置模式。
步骤11:完成原点设置现在,您已经完成了FANUC车床原点的设置。
您可以通过手动或自动模式下的程序控制来测试和确认车床的动作和运动。
总结:FANUC车床原点设置是调试车床的重要步骤。
通过正确设置车床的原点位置,可以确保车床的运动的准确性和稳定性。
以上的步骤提供了一个详细的指南,以帮助您完成FANUC车床原点设置。
FANUC数控系统接线与调试介绍
FANUC数控系统接线与调试介绍FANUC数控系统是一种广泛应用于机床、机器人等自动化设备中的控制系统,其稳定性和精准度受到广泛认可。
在使用FANUC数控系统时,接线与调试是非常重要的一环,它直接影响到设备的正常运行和性能表现。
因此,本文将介绍FANUC数控系统的接线与调试流程,帮助读者更好地了解如何正确操作与维护该系统。
一、前期准备在进行FANUC数控系统接线与调试之前,首先需要进行一些前期准备工作,包括准备好必要的工具和设备,以及了解相关的安全事项。
在准备阶段,要确保设备的电源接入正常,地线连接牢固,同时要确保设备处于停止状态,避免发生意外情况。
二、接线步骤1.查看接线图纸在进行FANUC数控系统的接线之前,首先要仔细查看接线图纸,了解设备的各个部件之间的连接关系。
接线图纸通常包括电气设备的布置图、接线图和调试表等内容,可以帮助操作人员更加直观地了解设备的接线情况。
2.接线布线根据接线图纸的指示,逐步完成各个部件之间的接线布线工作。
在进行接线时,要注意保持线路整齐,避免出现交叉、错位等问题,确保接线的稳固性和安全性。
3.接线连接完成接线布线后,接下来是进行接线连接,将各个部件之间的电线进行连接。
在连接过程中,要注意检查每个接头是否牢固,避免出现接触不良或断线等问题,确保电路的畅通。
4.电气箱内部接线接线完成后,需要打开电气箱进行内部接线工作。
在进行内部接线时,要根据接线图纸的指示,将电气元件进行正确连接,注意避免短路或接线错误等问题。
5.调试接线完成接线后,需要进行调试接线工作,检查设备各部件之间的连接是否正常,判断接线是否正确。
在调试过程中,要注意观察设备的运行情况,及时发现并解决接线问题。
三、调试工作1.电源接入检查在接线完成后,首先需要进行电源接入检查,确认电源接入正常,电压稳定,地线连接牢固,避免发生电路故障和安全事故。
2.控制系统调试接线完成后,进行控制系统的调试工作。
通过设定相关参数和程序,检查控制系统的运行情况,确保设备的正常运行。
FANUC数控系统轴设定参数的调试
0:移动指令按半径规格指令 1:移动指令按直径规格指令
X
半径 Z
直径
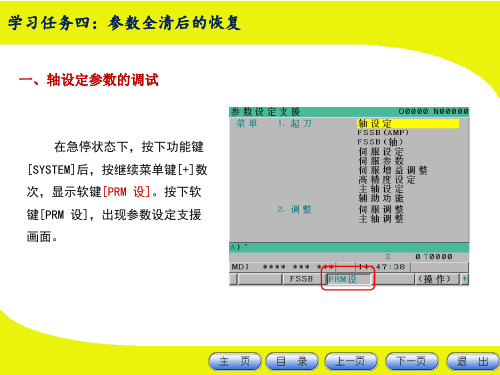
学习任务四:参数全清后的恢复
设定正 确否?
学习任务四:参数全清后的恢复
学习任务四:参数全清后的恢复
学习任务四:参数全清后的恢复
学习任务四:参数全清后的恢复
学习任务四:参数全清后的恢复
轴名称设定
参数 1020
X:88 Y:89 Z:90
#2
#1
#0
CTBx CTLx
学习任务四:参数全清后的恢复
参数 1620 各轴快速移动直线型加减速时间常数T或铃型加减速时间常数T1 各轴快速移动加减速时间常数。
设定值:50-200
直线加减速
学习任务四:参数全清后的恢复
参数 1621
各轴快速移动铃型加减速时间常数T2
各轴快速移动铃型加减速时间常数T2。
学习任务四:参数全清后的恢复
学习任务四:参数全清后的恢复
学习任务四:参数全清后的恢复
学习任务四:参数全清后的恢复
学习任务四:参数全清后的恢复
无挡块回零参数设定
1.设置如下参数
1005#1=1:选择返回参考点方式。0:有挡块。1:无挡块 1006#5=0:选择返回参考点方向。0:正方向,1:负方向 1428=1000:每个轴的参考点返回速度 2.将参数1815#5设为1。此时系统会报警“PW0000必需关断电源”,切断NC电
各轴点动进给加减速时间常数 各轴点动进给指数加减速的FL速度
20分钟
学习任务四:参数全清后的恢复
学习任务四:参数全清后的恢复
参数 1825
各轴位置环增益(0.01sec )
• 设定伺服响应,标准值设定为3000。
FANUC 0I-MD机床调试及验收
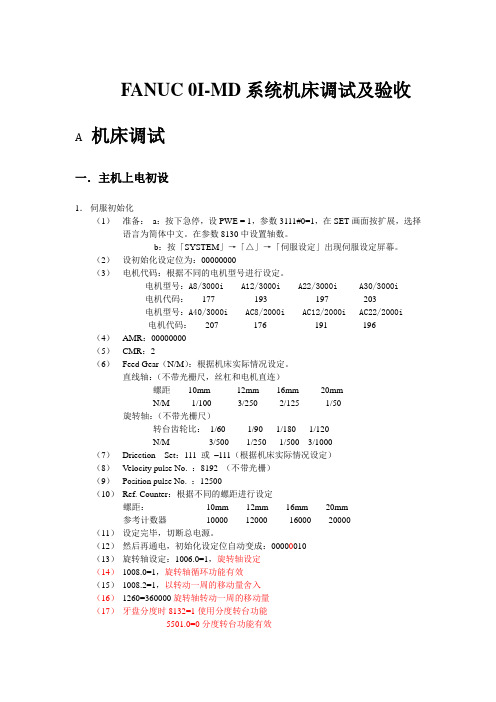
FANUC 0I-MD系统机床调试及验收A机床调试一.主机上电初设1.伺服初始化(1)准备:a:按下急停,设PWE = 1,参数3111#0=1,在SET画面按扩展,选择语言为简体中文。
在参数8130中设置轴数。
b:按「SYSTEM」→「△」→「伺服设定」出现伺服设定屏幕。
(2)设初始化设定位为:00000000(3)电机代码:根据不同的电机型号进行设定。
电机型号:A8/3000i A12/3000i A22/3000i A30/3000i电机代码:177 193 197 203电机型号:A40/3000i AC8/2000i AC12/2000i AC22/2000i电机代码:207 176 191 196 (4)AMR:00000000(5)CMR:2(6)Feed Gear(N/M):根据机床实际情况设定。
直线轴:(不带光栅尺,丝杠和电机直连)螺距10mm 12mm 16mm 20mmN/M 1/100 3/250 2/125 1/50旋转轴:(不带光栅尺)转台齿轮比:1/60 1/90 1/180 1/120N/M 3/500 1/250 1/500 3/1000(7)Driection Set:111 或–111(根据机床实际情况设定)(8)Velocity pulse No. :8192 (不带光栅)(9)Position pulse No. :12500(10)Ref. Counter:根据不同的螺距进行设定螺距:10mm 12mm 16mm 20mm参考计数器10000 12000 16000 20000 (11)设定完毕,切断总电源。
(12)然后再通电,初始化设定位自动变成:00000010(13)旋转轴设定:1006.0=1,旋转轴设定(14)1008.0=1,旋转轴循环功能有效(15)1008.2=1,以转动一周的移动量舍入(16)1260=360000旋转轴转动一周的移动量(17)牙盘分度时8132=1使用分度转台功能5501.0=0分度转台功能有效5512=1最小分度数2.FSSB 设定(1)参数No.1902 设为00000000(2)参数No.1020:X:88Y:89Z:90B:66参数No.1022:X:1Y:2Z:3B:0参数No.1023:X:1Y:2Z:3B:4(按照实际顺序设置)(3)按功能键「SYSTEM」,按数次扩展键「△」,直至出现「FSSB」.(4)按软键「AMP」,出现放大器设定画面,给连接到放大器的轴设定一个顺序号,按照连接放大器的顺序设定号码。
FANUC系统数控机床调试参数

FANUC数控机床调试参数系统第一次通电,必须把参数写保护打开(设定画面第一项PWE=1),否则参数无法写入。
在MDI方式下,按软键盘上的SYSTEM,在参数画面下将参数3190#6(CH2)设成1,断电重启,画面上的文字转换成中文。
注:无特殊情况下,第一次通电最好不要进行全清。
一、FSSB设定先把参数8130和1010的值设为3,表示3个轴;参数1023设成1;2;3,参数1902#0=0(当参数1902#1 ASE=1时,表示当选择FSSB自动设定方式时,自动设定完成)。
进入SYSTEM,按显示器下的键,画面进入伺服设定,初始化位设为0,将在表5中查得的电机代码输入(0i-Mate系列的Z轴电机代码要比X、Y两轴的代码大1)。
进入伺服调整画面,按照调试手册P15的图中设定X、Y、Z的各项,断电重启。
如果启动后不出现调试手册中P16表1的报警,则FSSB设定完成,否则重新设定FSSB(线路正常情况下)。
如果出现466号报警,将参数2165设为25、25、45(0i-Mate);45、45、45(0i-MC),复位即可消除此报警。
二、主轴设定在参数4133中输入主轴电机代码(表6中查得电机代码),把4019#7设定为1进行自动初始化。
断电重启,设定参数3736为4095,3741号参数为电机的最高转速(即主轴电机的额定转速)。
注:参数4020与3741的值必须一致,否则主轴的转速将与倍率开关的档位不对应三、各种功能对应的参数设定0i-Mate系列按照调试手册中P25-P26的AI先行控制中的参数设定;0i-MC 系列按P26-P27的AI轮廓控制中的参数设定。
其中参数1432为4000~10000、1620为150、1621为80。
四、其它参数的设定当以上的参数设好之后,如无出现报警现象,将下面参数输入。
参数如下:参数号功能设定值范围0020 I/O通道选择(同设定画面中的设定)0——RS2324——卡138#7=1 MDN=1:使用存储卡进行DNC操作有效1002#0 JAX=1:手动和回参考点同时控制轴数为3轴1006#5 ZMI=1:回零时停在负方向1020 各轴的编程名称X——88Y——89Z——901022 基本坐标系中各轴的属性X——1Y——2Z——31023 各轴的伺服轴号X——1Y——2Z——31241 第二参考点的设定1300#2 存储式行程检测切换信号EXLM有效LMS=11320 机床正向软限位1321 机床负向软限位1401#4 进给率为0时快速移动停止RF0=11410 空运行速度5000mm/min1420 各轴快速移动速度8000 mm/min1421 各轴快速移动倍率的F0速度500 mm/min1422 最大切削进给速度6000 mm/min1423 各轴手动连续(JOG)进给速度1000 mm/min1424 各轴手动快速移动速度3000 mm/min1425 各轴返回参考点减速后(FL)的速度300 mm/min1622 插补后切削进给时间常数150 ms1624 插补后JOG进给时间常数20 ms1800#1 位置控制就绪信号PRDY接通之前,速度控制就绪信号VRDY先接通时,不出现伺服报警CVR=11821 各轴的参考计数器容量80001825 各轴的伺服位置环增益3000~50001851 各轴反向间隙补偿量2022 电机旋转方向(根据实际情况调整正负值)X——-111Y——111Z——1113003#0 互锁无效ITL=13003#2 各轴互锁无效ITX=13003#3 各轴方向互锁无效DIT=13003#5 限位开关零点触头接常闭DEC=0限位开关零点触头接常开DEC=13105#0 MDI方式显示DPF=13105#2 实际主轴速度和T代码显示DPS=13108#7 显示手动连续进给速度JSP=13111#0 显示伺服设定画面SVS=1 #1 显示主轴调整画面SPS=1#2 显示同步误差值是峰值SVP=13117#0 在程序检查画面显示打开或关闭主轴速度表和负载表SMS=13190#6 显示简体汉字CH2=13202#4 程序O9000~9999的编辑禁止(刀库用)NE9=13210加密3211解密3605#0 使用双向螺补功能BDP=13620~3627 螺距补偿的设定4077 主轴定位5001#5 刀具补偿用H代码TPH=1当5001#2 OFH=0时有效6071=6 当设为0时无效,M00不能调用9001~9009子程序6711加工零件数6712加工零件总数参数6711和6712的设定只有当6700#0 为0时有效7113 手轮进给倍率1008131#0 使用手轮进给HPG=1注:如果软键盘上的键值不对应,将参数3100#2置1,3100#3置0即可如果在手动和回参考点是不能同时控制3轴,将1002#0 JAX置1即可栅格量的调整:在诊断画面中,参数302号可以看到各轴的栅格量,最好应在4000~5000之间,栅格量的调整只要调整零点开关的位置当参数4020和3741不一致时,显示出来的主轴转速与主轴倍率选定的不对应攻丝参数设定5200#4(DOV)=1 刚性攻丝退刀时倍率有效(倍率值在参数NO.5211中设定)5200#5(PCP)=1 刚性攻丝不使用高速深孔攻丝循环5201#0(NIZ)=1 进行刚性攻丝的平滑处理5204#0(DGN)=1 在诊断画面上显示主轴和攻丝轴的偏差量的偏差值5210=29 指令刚性攻丝的M代码5211=200 刚性攻丝退刀时的倍率值5241=3000 刚性攻丝时主轴的最高转速(第1档)5242=3000 刚性攻丝时主轴的最高转速(第2档)5243=3000 刚性攻丝时主轴的最高转速(第3档)5261=2000 主轴和攻丝轴的直线加减速时间常数(第1档)5262=2000 主轴和攻丝轴的直线加减速时间常数(第2档)5263=2000 主轴和攻丝轴的直线加减速时间常数(第3档)5280=1000 刚性攻丝时主轴和攻丝轴的位置控制回路增益5300=20 刚性攻丝时攻丝轴的到位宽度5301=20 刚性攻丝时主轴的到位宽度5310=32000 刚性攻丝时攻丝轴移动时位置偏差的极限值5311=32000 刚性攻丝时主轴移动时位置偏差的极限值5312=800 刚性攻丝中攻丝轴停止时的位置偏差极限值5313=800 在刚性攻丝中主轴停止时的位置偏差极限值5314=32000 在刚性攻丝中攻丝轴移动时位置偏差的极限值。
FANUC高速高精度控制的调整步骤
根据实际情况选择合适的控制算法,如PID控制、模糊控制等,以满 足系统对高速和高精度的要求。
控制策略
根据实际需求,制定合适的控制策略,如轨迹规划、动态补偿等,以 提高系统性能和稳定性。
调试与优化
在软件配置过程中,需要进行系统调试和优化。通过调整软件参数和 算法参数,不断优化系统性能,提高控制精度和稳定性。
软件升级
及时升级fanuc控制系统软件,获取 最新的功能和性能优化,提高加工过 程的控制精度和稳定性。
05 结论
fanuc高速高精度控制的优势
高速高精度控制能够提高加工效率和 加工质量,减少加工误差,提高产品 的一致性和可靠性。
fanuc高速高精度控制能够适应各种 复杂和高效的加工需求,提高了加工 过程的灵活性和适应性。
伺服增益是影响系统动态特 性的重要参数。通过调整伺 服增益,可以改善系统响应 速度和跟踪性能。需要根据 实际情况,通过试验确定最 佳的伺服增益值。
为了消除系统中的噪声和振 动,需要设置合适的滤波器 。通过调整滤波器的参数, 可以优化系统的低通和高通 特性,提高控制精度和稳定 性。
轴参数包括位置环增益、速 度环增益、加速度等,这些 参数对轴的控制性能产生重 要影响。需要根据实际情况 ,对轴参数进行合理配置, 以保证轴的高速和高精度运 动。
硬件配置
硬件配置
伺服电机
编码器
传动机构
在调整fanuc高速高精度控制 时,需要考虑系统的硬件配置 。硬件配置包括伺服电机、编 码器、传动机构等,这些部件 的性能对系统控制效果产生直 接影响。
选择合适的伺服电机是实现高 速高精度控制的关键。需要根 据实际需求,选择具有高动态 响应和高精度的伺服电机。
高速加工
通过优化加工路径和切削参数, fanuc高速高精度控制能够实现高 速加工,从而提高生产效率和降低 生产成本。
发那科(FANUC)CNC系统与机床的连接及调试

发那科(FANUC)CNC系统与机床的连接及调试发那科计算机数控系统是最畅销的机床控制系统。
目前在国内主要使用0系统和0i系统,针对广大用户的实际情况,本文简要叙述这两种系统的连接及调试,掌握了这两种系统,其它FANUC系统的调试则迎刃而解。
1.调机步骤:⑴.接线:按照设计的机床电柜接线图和系统连接说明书(硬件)中(书号:B-61393或B-63503)绘出的接线图仔细接线。
⑵.拔掉CNC系统和伺服(包括主轴)单元的保险,给机床通电。
如无故障,装上保险,给机床和系统通电。
此时,系统会有#401等多种报警。
这是因为系统尚未输入参数,伺服和主轴控制尚未初始化。
⑶.设定参数:①. 系统功能参数(既所谓的保密参数):这些参数是订货时用户选择的功能,系统出厂时FANUC已经设好,0C和0i不必设。
但是,0D(0TD和0MD)系统,须根据实际机床功能设定#932--#935的参数位。
机床出厂时系统功能参数表必须交给机床用户。
②. 进给伺服初始化:将各进给轴使用的电机的控制参数调入RAM区,并根据丝杠螺距和电机与丝杠间的变速比配置CMR和DMR。
方法如下:·设参数SVS,使显示器画面显示伺服设定屏(Servo Set)。
0 系统设参数#389/0位=0;0i系统设参数#3111/0位=1。
然后在伺服设定屏上设下列各项:·初始化位置0。
此时,显示器将显示P/S 000报警,其意义是要求系统关机,重新启动。
但不要马上关机,因为其它参数尚未设入。
应返回设定屏继续操作。
·指定电机代码(ID)。
根据被设定轴实际使用的电机型号在“伺服电机参数说明书(B—65150)”中查出其代码,设在该项内。
·AMR设0。
·设定指令倍比CMR。
CMR=命令当量/位置检测当量。
通常设为1。
但该项要求设其值的1倍,所以设为2。
·设定柔性变速比(N/M)。
根据滚珠丝杠螺距和电机与丝杠间的降速比设定该值。
FANUC系统调试说明
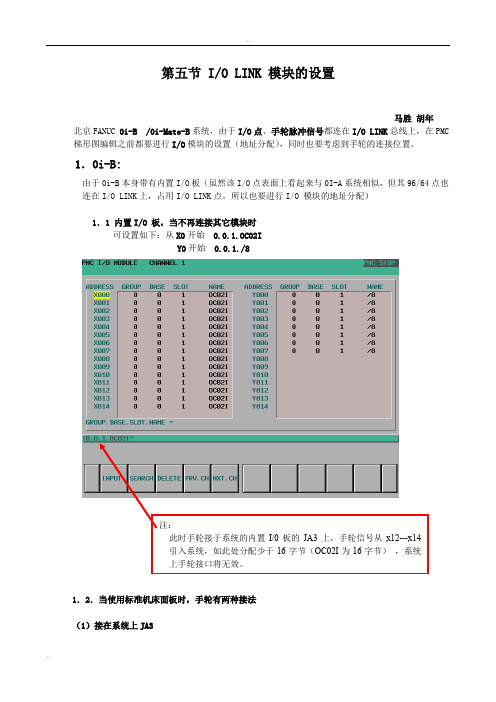
第五节 I/O LINK 模块的设置马胜胡年北京FANUC 0i-B /0i-Mate-B系统,由于I/O点、手轮脉冲信号都连在I/O LINK总线上,在PMC 梯形图编辑之前都要进行I/O模块的设置(地址分配),同时也要考虑到手轮的连接位置。
1.0i-B:由于0i-B本身带有内置I/O板(虽然该I/O点表面上看起来与0I-A系统相似,但其96/64点也连在I/O LINK上,占用I/O LINK点。
所以也要进行I/O 模块的地址分配)1.1 内置I/O 板,当不再连接其它模块时可设置如下:从X0开始 0.0.1.OC02IY0开始 0.0.1./81.2.当使用标准机床面板时,手轮有两种接法(1)接在系统上JA3可设置如下:系统侧的I/O点从X0开始 0.0.1.OC02IY0开始 0.0.1./8面板侧的I/O点从X20开始 1.0.1. OC02I(或OC01I)Y24开始 1.0.1./8*此种设法可使面板上x/y数值上一样(X24对应Y24的信号名称,如此类推,如:X24.0为MEM 方式的X地址, Y24.0为MEM方式输出灯),便于编写梯形图,且注意此时面板后JA3无效(2)接在面板后JA3可设置如下:系统侧的I/O点从X0开始0.0.1.OC01IY0开始0.0.1./8面板侧的I/O 点从X20开始 1.0.1. OC02I (OC02I 对应手轮)Y24开始 1.0.1./81.3 分线盘I/O 模块的设定对于分线盘(分散型)I/O 模块,要将所有的模块(基本模块加扩展模块)作为一个整体一起设定。
因为可以连接一个基本模块,最多3个扩展模块,每个模块单元占用3个字节的输入点,2个字节输出点,总共占用12字节输入/8字节输出(96/64点),和上述的内装I/O 相似,也可以连接手轮,设定方法相似可设置如下:不带手轮 输入X0开始 0.0.1.OC01I输出 Y0开始 0.0.1./8带手轮:输入X0开始1.0.1. OC02I (OC02I对应手轮)Y0开始1.0.1./8下面图中的地址m就是此处的0,n就是此处的0(首地址)*模块的连接顺序(安装位置)接手轮注意:1。
FANUC30i同步轴调试方法
FANUC 30i同步轴调试方法摘要:本文在对Fanuc系统同步轴功能研究的基础上,就同步轴功能相关参数的意义进行了说明,总结了发那科数控系统同步轴的调试方法。
关键词:同步轴主从控制零点栅格栅格偏移1.引言大型龙门机床多采用同步驱动的方式,日常维修中经常发生由于龙门轴不同步引起的机床抖动现象,解决此类问题的关键是在确保龙门轴机械位置的前提下,如何快速建立主、从电机的参考点。
同步轴功能在不同的数控系统中叫法各异,Fanuc系统称之为Tandem功能,西门子系统则称为Gantry(龙门)轴。
该功能的原理是主动轴用于定位;从动轴只提供力矩,没有位置控制和速度控制,在实际应用中主要有两种结构。
1.FANUC30i数控系统同步轴调试步骤在进行调试前首先要对主、从轴进行定义来明确各轴的主从地位及对应关系,其次是进行齿轮变比、进给速度等参数进行设定。
法那科系统同步轴调试可按照以下步骤进行:一、电机参数的基本设定对将作为主、从电机配置的坐标进行基本设定,方法与普通电机基本设定一样。
如果采用全闭环结构,对主动电机反馈相关参数进行设置。
注意事项:a 、主从电机的速度增益必须设置相同的值b 、参数1023必须设定为:主动电机为奇数,从动电机为加1的偶数c 、在屏蔽同步轴功能时,只允许主从电机微动,防止机械损坏d 、在进行下一步设定前,再次确认参数 No .2022,确认主、从电机的转向是否致。
方法:从脉冲编码器一侧看,主动电机沿顺时针方向旋转(设定为111),主动电机沿逆时针方向旋转(设定为-111)。
二、主、从电机同步轴功能基本设定设置主、从电机参数( No .1817#6)设定为"1",使能同步轴功能,在从动轴参数设定以下参数:No.8311中设定主控轴的轴号,确定同步轴控制功能的构成;No .8303#4设定为"1",从动轴参数自动设定功能有效;No .8302#7和 No .8304#7设定为"1"。
FANUC调试参数(精)

FANUC机床调试参数系统第一次通电,必须把参数写保护打开(设定画面第一项PWE=1),否则参数无法写入。
在MDI方式下,按软键盘上的SYSTEM,在参数画面下将参数3190#6(CH2)设成1,断电重启,画面上的文字转换成中文。
注:无特殊情况下,第一次通电最好不要进行全清。
一、FSSB设定先把参数8130和1010的值设为3,表示3个轴;参数1023设成1;2;3,参数1902#0=0(当参数1902#1 ASE=1时,表示当选择FSSB自动设定方式时,自动设定完成)。
进入SYSTEM,按显示器下的键,画面进入伺服设定,初始化位设为0,将在表5中查得的电机代码输入(0i-Mate系列的Z轴电机代码要比X、Y两轴的代码大1)。
进入伺服调整画面,按照调试手册P15的图中设定X、Y、Z的各项,断电重启。
如果启动后不出现调试手册中P16表1的报警,则FSSB设定完成,否则重新设定FSSB(线路正常情况下)。
如果出现466号报警,将参数2165设为25、25、45(0i-Mate);45、45、45(0i-MC),复位即可消除此报警。
二、主轴设定在参数4133中输入主轴电机代码(表6中查得电机代码),把4019#7设定为1进行自动初始化。
断电重启,设定参数3736为4095,3741号参数为电机的最高转速(即主轴电机的额定转速)。
注:参数4020与3741的值必须一致,否则主轴的转速将与倍率开关的档位不对应三、各种功能对应的参数设定0i-Mate系列按照调试手册中P25-P26的AI先行控制中的参数设定;0i-MC 系列按P26-P27的AI轮廓控制中的参数设定。
其中参数1432为4000~10000、1620为150、1621为80。
四、其它参数的设定当以上的参数设好之后,如无出现报警现象,将下面参数输入。
参数如下:参数号功能设定值范围0020 I/O通道选择(同设定画面中的设定)0——RS2324——卡138#7=1 MDN=1:使用存储卡进行DNC操作有效1002#0 JAX=1:手动和回参考点同时控制轴数为3轴1006#5 ZMI=1:回零时停在负方向1020 各轴的编程名称X——88Y——89Z——901022 基本坐标系中各轴的属性X——1Y——2Z——31023 各轴的伺服轴号X——1Y——2Z——31241 第二参考点的设定1300#2 存储式行程检测切换信号EXLM有效LMS=11320 机床正向软限位1321 机床负向软限位1401#4 进给率为0时快速移动停止RF0=11410 空运行速度5000mm/min1420 各轴快速移动速度8000 mm/min1421 各轴快速移动倍率的F0速度500 mm/min1422 最大切削进给速度6000 mm/min1423 各轴手动连续(JOG)进给速度1000 mm/min1424 各轴手动快速移动速度3000 mm/min1425 各轴返回参考点减速后(FL)的速度300 mm/min1622 插补后切削进给时间常数150 ms1624 插补后JOG进给时间常数20 ms1800#1 位置控制就绪信号PRDY接通之前,速度控制就绪信号VRDY先接通时,不出现伺服报警CVR=11821 各轴的参考计数器容量80001825 各轴的伺服位置环增益3000~50001851 各轴反向间隙补偿量2022 电机旋转方向(根据实际情况调整正负值)X——-111Y——111Z——1113003#0 互锁无效ITL=13003#2 各轴互锁无效ITX=13003#3 各轴方向互锁无效DIT=13003#5 限位开关零点触头接常闭DEC=0限位开关零点触头接常开DEC=13105#0 MDI方式显示DPF=13105#2 实际主轴速度和T代码显示DPS=13108#7 显示手动连续进给速度JSP=13111#0 显示伺服设定画面SVS=1 #1 显示主轴调整画面SPS=1#2 显示同步误差值是峰值SVP=13117#0 在程序检查画面显示打开或关闭主轴速度表和负载表SMS=13190#6 显示简体汉字CH2=13202#4 程序O9000~9999的编辑禁止(刀库用)NE9=13210加密3211解密3605#0 使用双向螺补功能BDP=13620~3627 螺距补偿的设定4077 主轴定位5001#5 刀具补偿用H代码TPH=1当5001#2 OFH=0时有效6071=6 当设为0时无效,M00不能调用9001~9009子程序6711加工零件数6712加工零件总数参数6711和6712的设定只有当6700#0 为0时有效7113 手轮进给倍率1008131#0 使用手轮进给HPG=1注:如果软键盘上的键值不对应,将参数3100#2置1,3100#3置0即可如果在手动和回参考点是不能同时控制3轴,将1002#0 JAX置1即可栅格量的调整:在诊断画面中,参数302号可以看到各轴的栅格量,最好应在4000~5000之间,栅格量的调整只要调整零点开关的位置当参数4020和3741不一致时,显示出来的主轴转速与主轴倍率选定的不对应攻丝参数设定5200#4(DOV)=1 刚性攻丝退刀时倍率有效(倍率值在参数NO.5211中设定)5200#5(PCP)=1 刚性攻丝不使用高速深孔攻丝循环5201#0(NIZ)=1 进行刚性攻丝的平滑处理5204#0(DGN)=1 在诊断画面上显示主轴和攻丝轴的偏差量的偏差值5210=29 指令刚性攻丝的M代码5211=200 刚性攻丝退刀时的倍率值5241=3000 刚性攻丝时主轴的最高转速(第1档)5242=3000 刚性攻丝时主轴的最高转速(第2档)5243=3000 刚性攻丝时主轴的最高转速(第3档)5261=2000 主轴和攻丝轴的直线加减速时间常数(第1档)5262=2000 主轴和攻丝轴的直线加减速时间常数(第2档)5263=2000 主轴和攻丝轴的直线加减速时间常数(第3档)5280=1000 刚性攻丝时主轴和攻丝轴的位置控制回路增益5300=20 刚性攻丝时攻丝轴的到位宽度5301=20 刚性攻丝时主轴的到位宽度5310=32000 刚性攻丝时攻丝轴移动时位置偏差的极限值5311=32000 刚性攻丝时主轴移动时位置偏差的极限值5312=800 刚性攻丝中攻丝轴停止时的位置偏差极限值5313=800 在刚性攻丝中主轴停止时的位置偏差极限值5314=32000 在刚性攻丝中攻丝轴移动时位置偏差的极限值。
Fanuc 0i 系统数控机床参数设置小经验三则
Fanuc 0i 系统数控机床参数设置小经验三则发表时间:2017-08-07T11:43:12.157Z 来源:《高等教育》2016年10月作者:鹿昆[导读] 为防止他人误删或修改机床参数,可通过下面方法隐藏系统参数,这样按SYSTEM功能键就看不到参数显示。
菏泽技师学院鹿昆一、隐藏参数为防止他人误删或修改机床参数,可通过下面方法隐藏系统参数,这样按SYSTEM功能键就看不到参数显示。
具体方法如下:在MDI方式下,按OFF/SET键两次(或按OFF/SET键再按SETTING键),翻页至3208号参数,把第0位改为1,如图1所示。
这时在参数界面下已看不到参数。
若想让参数再正常显示,只需在MDI方式下把3208的第0位再改为1即可。
图1缩放功能的有关设置一、使用各轴同比例缩放功能,即G51 X Y Z P 方式,参数设置如下:1、将参数8132的第五位(SCL)设为1。
此位控制是否使用缩放功能,为1使用,为0则不使用。
2、将参数5400的6位(XSC)为设为0。
此位控制是否使用各轴不同倍率缩放功能。
为0时不能使用不同倍率缩放,只能使用P指令缩放3、将5400的第7位(SCR)最好也设为1。
该位控制缩放的倍率单位,为1时缩放的倍率单位为0.001倍,为0时缩放倍率单位为0.00001倍,这样会使P或I、J、K后的输入位数无谓增多。
通过这三步设置即可使用P指令对各轴进行同比例缩放,P后用不带小数点的数值表示,如P500表示缩小0.5倍。
若P后用加点的数值则报警,提示为小数点使用非法。
二、使用各轴不同比例缩放功能,即G51 X Y Z I J K 方式。
参数设置如下:1、参数8132的第五位仍然为1,2、参数5400的第六位改为1,使各轴缩放倍率功能有效,此时就不可使用P指令进行同倍率缩放。
3、把要使用不同倍率缩放轴的参数5401的第0位置1。
不设置5401的第0位或该位参数设置错误,使用I、J、K缩放时均会出现报警。
发那科系统的控制器调整

发那科系统的控制器调整发那科系统(Fanuc)的控制器是一种用于机器人和自动化应用的关键设备。
调整控制器可以帮助优化机器的性能和生产效率。
以下是一些调整发那科系统控制器的注意事项:1. 快速参考手册在进行控制器调整之前,建议参考发那科系统的快速参考手册。
该手册提供了详细的说明和步骤,可以帮助您正确地理解和操作控制器。
2. 参数设置调整控制器的参数设置对机器的性能有很大影响。
您可以根据机器的需求和操作要求调整不同的参数。
确保您具备充分的了解和知识,以便正确地调整参数,避免对机器的性能产生不良影响。
3. 微调运动程序运动程序的微调可以进一步优化机器的性能。
您可以通过调整运动程序中的加速度和减速度参数,来获得更平滑和高效的运动控制。
确保在调整过程中根据具体的应用需求进行适当的实验和测试。
4. 检查软件版本定期检查发那科系统控制器的软件版本是非常重要的。
更新软件版本可以帮助解决一些已知的问题,并提供更好的性能和新功能。
确保您了解如何正确地升级软件,并对新版本进行必要的测试。
5. 监控指标分析通过监控指标分析可以了解机器的运行状态和性能水平。
使用发那科系统提供的监控工具,可以对控制器的运行数据进行实时监测和分析。
根据分析结果,您可以识别出潜在的问题,并采取相应的措施进行调整和优化。
以上是关于发那科系统控制器调整的一些基本注意事项。
请记住,在进行任何调整之前,请详细阅读相关文档,确保您具备必要的知识和技能。
如遇到复杂或无法确认的问题,请咨询专业人士以获取进一步的帮助。
FANUC系统数控机床调试参数

FANUC系统数控机床调试参数在FANUC系统数控机床调试参数方面,有以下几个关键的参数需要注意调整和优化。
首先是加工切削参数,如进给速度、主轴转速、切削深度等。
根据工件材料和加工要求,需要根据实际情况调整这些参数,以获得最佳的加工效果。
进给速度和主轴转速的选择是根据切削力的大小和切削削屑的排出要求来确定的。
切削深度是根据工件材料的韧性和刚度、刃磨质量来确定的。
第二个参数是工具补偿参数。
工具的几何参数和偏差会影响到加工的精度和质量。
需要根据实际情况进行工具测量和补偿,确保加工结果符合要求。
在进行工具补偿时,需要考虑工具的磨损情况和工件的尺寸变化,及时进行补偿调整,以保证加工质量。
第三个参数是机床几何误差补偿参数。
机床的传动系统、导轨系统等都会存在一定的误差,这些误差会对加工结果产生影响。
通过测量和调整机床的几何误差补偿参数,可以提高加工精度和质量。
常见的几何误差包括直线度、平行度、垂直度等,需要根据实际情况进行测量和调整。
第四个参数是检测和调整系统精度的参数。
在进行调试时,需要对系统的精度进行检测和调整。
包括坐标系误差、固定循环误差、热补偿精度等。
根据实际情况进行调整和校正,以提高机床的精度和稳定性。
最后是工作参数的调试。
在调试时,需要根据实际工作情况进行合理的工作参数设定。
包括工件装夹方式、刀具刀路、切削冷却液的使用等。
根据实际情况进行调整和优化,以确保加工过程的安全和稳定。
总之,FANUC系统数控机床调试参数需要综合考虑切削参数、工具补偿参数、机床几何误差补偿参数、检测和调整系统精度的参数以及工作参数等多个方面。
通过合理的调试和优化,可以提高机床的性能和加工质量。
FANUC系统数控机床调试参数
FANUC系统数控机床调试参数FANUC系统数控机床调试参数是指在使用FANUC系统的数控机床时,根据具体加工要求和机床性能进行调试和优化的参数设置。
通过合理的参数设置,可以提高机床的加工精度、加工效率和稳定性,确保加工质量和生产效率。
本篇文章将详细介绍FANUC系统数控机床调试参数的相关内容。
首先,我们来介绍一些常见的FANUC系统数控机床调试参数。
1.加工参数:包括进给速度、快速移动速度、加速度、减速度等。
这些参数直接影响机床的加工效率和加工质量。
根据加工材料、加工工艺和加工要求的不同,可以适当调整这些参数。
一般来说,进给速度越大,加工效率越高;而快速移动速度则直接关系到机床的定位精度和快速切换速度。
2.修整参数:包括修正工具半径、琢磨刀具半径、工件和加工曲线的变化。
这些参数主要用于修剪加工过程中产生的误差,并对加工误差进行补偿。
通过调整这些参数,可以减少加工误差,提高加工精度。
3.运动参数:包括插补精度、工具半径补偿、切削速度刚度等。
这些参数直接影响机床的运动精度和切削效果。
根据加工要求和机床的性能,可以适当调整这些参数,使机床在高速运动和切削过程中保持稳定。
4.伺服参数:包括伺服增益、速度反馈环、电流反馈环等。
这些参数主要用于调节数控机床的伺服系统,保证伺服系统的稳定性和响应速度。
通过合理调整这些参数,可以提高伺服系统的性能和精度,减少振动和误差。
5.轴参数:包括轴偏差补偿、轴运行速度、坐标系转换等。
这些参数主要用于调整数控机床的各个轴的运动精度和坐标系的转换。
通过合理调整这些参数,可以减少机床的位置误差和运动畸变,提高加工精度。
在调试FANUC系统数控机床时,需要根据实际情况进行参数设置和调整。
具体的调试步骤如下:1.根据加工要求和机床性能,确定需要调试的参数和范围。
2.设置机床的调试模式和参数修改权限,确保可以进行参数设置和调整。
3.逐一调试各个参数,根据实际情况进行调整,并记录下参数值和调试结果。
FANUC数控机床的安装和调试过程
目录摘要 (2)第一章、数控机床的安装 (2)1.1机床基础 (2)1.2机床安装 (2)1.3机床电源接线要求 (3)第二章、FANUC数控机床的调试 (3)2.1 FANUC数控机床的调试 (3)2.1.1数控机床机电联调电气前期工作 (3)2.1.2加工中心的调试步骤 (3)2.1.3强电试调 (3)2.1.4电源电压准备 (4)2.1.5各控制回路的调试 (4)2.1.6弱电调试 (5)2.2 PMC梯形图(LADDER)的调试 (6)第三章、数控机床的验收 (8)3.1预验收 (8)3.2开箱检验 (8)3.3机床精度验收 (9)结语 (10)参考文献: (10)致谢 (11)FANUC数控机床的安装和调试过程摘要:数控设备的应用越来越广泛,对数控设备的安装、调试是保证设备高效工作的必要前提,是企业的一项重要管理工作。
当机床运到后,首先要进行安装、调试、并进行试运行,精度验收合格后才能交付使用。
本文详细阐述了对FANUC数控机床的安装和调试过程。
关键词:数控安装调试第一章、数控机床的安装按照工艺流程,选择好机床安装位置,然后按照机床厂家提供的机床基础图和外形图进行车间现场实际放线工作。
检查机床与周边设备、走道、设施(消防栓、低压控制柜、暖气装置、各种管道、立柱加强筋)等有无干涉,并注意天车行程极限,若有干涉需移位后再重新放线,直至无干涉为止。
1.1机床基础机床基础可按照机床厂家提供的基础图来做,基础深度要考虑土质情况。
浇注基础时,需用振捣器将混凝土振实,中间多浇注一些,防止中部下沉过多,并需将基础表面找平抹平,否则无法调整机床。
车间一般先做机床基础、预埋各种管道,后做地面。
车间地面在三合土的基础上铺200mm厚钢筋混凝土(混凝土加钢筋头)地面。
1.2机床安装机床组装前要把导轨和各滑动面、接触面上的防锈涂料清洗干净,把机床各部件,如数控系统柜、电气柜、立柱、刀库、机械手等组装成整机。
机床放置在基础上,应在自由状态下找平,然后将地脚螺栓均匀地锁紧,留出适当的调整量约1~2个螺母高度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2:
1
SELECT---YES---YES---SELECT---
面
2
(3.SYSTEM DATA LONDING)
SELECT---YES---YES---SELECT---
第二节通过ALL I/O 画面进行数据传输
1:由于上电后的状态英文, 很多人不认识,所以我们先把语言改为汉
----左
2:PLC及PLC参数的传入
a.首先选择键,出现上页左图4-----扩展2次------出现左图1---选择“PMCMNT”-----左图2,选择“I/O”-----选择“操作”-----选择“列
c. 如果使用USB经行操作的话,需要把左图 2 中装置中的光标移至”USB MEMORY”,即可对PLC和PLC参数进行操作。
3:PLC及PLC参数的备份
首先选择键
3-----选择
注
1.在传入的过程中,显示面板右下角会有
“输入”字样闪烁,在传入过程中不要有
其它页面操作,以免导致丢失数据
2.程序锁钥匙一定要打开
如果程序号8000-8999的程序无法操作,检查参数3202#0(0:不禁止编辑1:禁止编辑)
如果程序号9000--9999的程序无法操
作,检查参数3202#4 (0:不禁止编辑
1:禁止编辑)
键
有IO
303
word格式文档。