THALES雷达ADU(方位分配单元)频繁切换通道的解决方法
Thales DME435型导航设备隐患排除实例
Thales DME435型导航设备隐患排除实例在航空器导航设备中,隐患的排除非常重要,因为它们直接关系到航空安全。
以下是Thales DME435型导航设备隐患排除的一个实例。
Thales DME435型导航设备是一种航空器上常用的测距测向设备,用于测量航空器与地面上的导航台之间的距离和方位角。
在使用Thales DME435导航设备时,一些隐患可能会出现,影响航空器的导航精确性和安全性。
一项常见的隐患是导航设备的显示屏可能出现故障。
显示屏的故障可能导致航空员无法看到相关导航信息,从而使航空器的导航变得困难甚至不可能。
为了解决这个问题,航空器的维修人员应在每次飞行前对导航设备进行仔细检查,确保显示屏的正常运行。
如果发现显示屏故障,应立即更换显示屏或进行修理。
另一个隐患是导航设备的频率可能受到干扰。
频率干扰可能来自其他电子设备、雷达设备或其他导航设备。
频率干扰可能导致导航设备测量的距离和方位角不准确,从而给导航带来风险。
为了解决这个问题,航空器的维修人员应确保导航设备的频率设置正确,并根据需要使用干扰消除技术来减轻频率干扰的影响。
导航设备的软件可能存在bug或漏洞,可能导致不正确的导航计算。
为了排除这个隐患,导航设备的制造商应经常更新软件,并及时发布修复程序。
航空器的维修人员应定期检查并更新导航设备的软件版本,以确保其安全性和准确性。
Thales DME435型导航设备在使用过程中可能会出现一些隐患。
为了排除这些隐患,航空器的维修人员应定期检查导航设备的显示屏、频率设置、天线和软件,并进行必要的维修和更新。
这样可以确保导航设备的正常运行,提高航空器的导航精确性和安全性。
浅谈THALES雷达时标板告警的消除与总结的论文

浅谈THAL ES雷达时标板告警的消除与总结的论文浅谈THAL ES雷达时标板告警的消除与总结的论文浅谈THAL ES雷达时标板告警的消除与总结的论文前言近年来,民航事业迅猛发展,民航安全也成为逐步热门的话题航管二次监视雷达在民航安全飞行过程中起着小可替代的重要作用广西空管分局技术保障部于2003年8月从法国引进THALES RSM970S一次监视雷达,安装于广西百色市境内,用以覆盖广西西北力向的高空区域该雷达技术先进,运行一直比较平稳,但随着工作时间的增加,最近开始出现一些告警,本文选择了THALES雷达时标板(TSFCARD)告警这一故障现象的出现及对其处理,并作总结,希望在以后的工作中对雷达设备维护人员碰到类似的故障能起到一定的帮助。
1THALES需达构成简介法国THALES雷达主要由LVA垂直大孔径天线系统(AS909),射频切换单元、询问机控制和监视电脑(LTM,STM),雷达维护显示系统(IRIS)、力位分配单元(ADU2000 )、天线控制机柜( AA2000 )、电源分配机柜(AE2000)、双通道应答器(SITE MONITOR)组成。
雷达包含有CH1 ,CH2两个询问通道,呈热备份关系,且在用通道遇故障后,能自动切换工作通道,以保障提供实时小间断的雷达目标2故障现象STM监控终端弹出告警窗口,提示在用的CH1通道时标模块TIME STAMPING存在故障,同时远端监控终端STM界而的该模块监控显示呈全红色告警状态,在IRIS上查看CH1通道雷达有目标显示,但没有时标信号THALES雷达自动切换至CH2通道工作,查看CH2通道监控显示该通道工作正常,雷达目标正常,时标信号也正常在STM监控电脑检查各级子模块发现只有CH1通道的TIMESTAMPING 模块存在告警,其他模块均正常工作用FAILURE RESER进行该模块的故障复位,小能清除告警,说明该故障小是虚假告警3故障初步处理、分析根据监控提示的告警信息初步推测TIME STAMPING模块可能存在故障至雷达站现场将TIME STAMPING对应的TSF片进行各件更换,告警信息仍然存在担心各件也可能存在类似的故障问题,将其换到一切均正常的CH2通道,发现工作正常,消除TSF各件板片故障的可能性因此,推断故障点还是存在于CH1通道内部的某个部件TSF - (Time Stamping Function)的主要功能有①时间接收验证;②力位处理;③提供信号输出接口;自检。
Thales DME435型导航设备隐患排除实例

Thales DME435型导航设备隐患排除实例Thales DME435型导航设备是一种常用的航空导航设备,可以用来测量飞机距离地面测向台的距离和方位角。
在使用过程中,这种设备也可能出现一些隐患,需要进行排除。
下面是一个Thales DME435型导航设备隐患排除实例。
在实际操作中,发现Thales DME435型导航设备显示的距离和方位角与实际情况有偏差,这可能是由于设备本身或者环境因素引起的。
为了找出并解决这个问题,我们需要按照以下步骤进行排除:1. 检查设备连接和电源:需要检查设备的电源和连接线是否正常。
如果发现电源故障或连接线松动,应立即修复或更换。
2. 检查天线:Thales DME435设备通过天线接收信号,并进行测量和计算。
检查天线是否正确安装,并确保天线没有损坏或杂质阻塞。
3. 检查设备设置:确认Thales DME435设备的设置参数是否正确。
确保频率、波束宽度、增益等参数都符合要求。
如果有需要,可以根据实际使用情况进行调整。
4. 检查设备环境:Thales DME435设备的工作环境也可能影响其性能。
检查设备周围是否有其他电磁干扰源的存在,例如其他导航设备、无线电台等,必要时可以将这些干扰源远离设备。
5. 检查设备软件:Thales DME435设备的软件也可能存在问题。
如果有更新的软件版本,可尝试进行软件升级。
如果问题仍然存在,可以联系设备供应商获取技术支持。
6. 检查设备使用方法:Thales DME435设备的使用方法是否正确也是一个关键因素。
操作人员需要熟悉设备的使用手册,并按照要求进行操作。
在排除隐患过程中,还需要借助其他测试工具进行辅助。
可以使用信号源模拟地面测向台的信号输入,然后观察Thales DME435设备的显示情况。
如果显示结果正确,则说明设备本身没有问题,可能是环境因素导致的隐患。
对于Thales DME435型导航设备隐患的排除,需要综合考虑设备本身、环境因素和操作方法等多个因素。
Thales DME435型导航设备隐患排除实例

Thales DME435型导航设备隐患排除实例Thales DME435型导航设备是一种常见的航空设备,用于飞机的导航和定位。
就像所有的机械设备一样,DME435型导航设备也存在着一些潜在的隐患。
在实际使用中,这些隐患可能会影响到飞机的飞行安全,因此及时排除这些隐患是至关重要的。
下面将介绍一种关于Thales DME435型导航设备隐患排除的实例。
让我们来了解一下Thales DME435型导航设备的基本原理和结构。
Thales DME435型导航设备是一种用于航空导航的设备,它主要通过测量航空器与地面DME台(距离测量设备)之间的距离,并将这些数据传输到飞行仪表中,从而帮助飞行员确定飞机的位置和航向。
该设备通常由天线、转发器、测向器和显示器等部件组成,它们共同协作完成航空导航的功能。
在使用Thales DME435型导航设备时,有时会出现一些隐患,例如无法正确测量距离、显示器出现故障、信号干扰等。
这些隐患可能会导致飞行员无法准确获得飞机位置信息,从而影响到飞行安全。
及时排除这些隐患是至关重要的。
下面我们将介绍一种关于Thales DME435型导航设备隐患排除的实例。
假设在某次航班中,飞行员发现Thales DME435型导航设备显示器出现故障,无法正确显示飞机与地面DME台之间的距离。
这时,飞行员应该立即采取以下步骤进行隐患排除:第一步,飞行员应该首先对显示器本身进行检查。
他们可以检查显示器的连接是否良好,是否存在松动或接触不良的情况。
如果发现显示器本身存在故障,飞行员可以尝试重新连接显示器,或者更换一个备用显示器进行测试。
第二步,如果显示器没有问题,飞行员可以对其他部件进行检查。
他们可以检查天线、转发器和测向器等部件是否存在故障或损坏。
如果发现其他部件存在问题,飞行员可以尝试对这些部件进行修理或更换,以排除隐患。
第三步,如果以上步骤都没有解决问题,飞行员可以尝试重新校准Thales DME435型导航设备。
THALESDVOR4000全向信标频率偏移的分析与维修

THALES DVOR4000全向信标频率偏移的分析与维修摘要:在目前航路及机场导航设备中,使用意大利THALES生产的DVOR4000设备比较多。
为了航行安全,飞机需要去接收到正确的全向信标信息。
因此,如果全向信标台的载波频率、识别码等主要参数故障,机载设备就接收不到正确的台站信号,从而影响飞行安全。
平时,在设备排故过程中,一般会采用更换板件的维修方式,将板故障板件进行替换,以保证设备快速修复,保证设备的完好率。
在往往每个台站的备件数量较少,或者常常只有一些易损备件。
而通常损坏的板件维修都需要送到厂家或者指定地维修单位,周期长,费用高,不利于配件的冗余安全性。
因此如果能自行修复备件则为“多快好省”。
本文介绍了THALES DVOR4000设备载波频率和上边带频率发生偏移,根据设备的工作原理进行分析,发现故障点并进行排除,实现设备的元件级的自主维修。
关键词:DVOR4000 全向信标频率偏移故障分析维修引言:某导航台THALES DVOR4000设备的设备载波频率和上边带频率发生故障,监控器窗口显示为“故障”,其参数为:MOD.Depth9960Hz AM 16.7% 红色告警Carrier frequency 1134857.5Hz (正常值为111.2MHz ) 红色告警Upper Sidband frequency 红色告警据此判断为设备载波频率和上边带频率发生偏移,下边带频率正常。
需要对其进行维修处理,以保证台站设备的完好率。
一,THALES DVOR4000设备工作原理介绍THALES DVOR4000设备是由意大利THALES公司生产的DVOR全向信标设备,它可以为航空器提供准确的导航台的方位信息。
通常与DME(测距仪)合装,用于定位、导航。
它目前在我国的民航导航设备中运用数量较多,在航路或机场都有安装。
DVOR4000全向信标设备,给航空器发送基准相位信号和可变相位信号,并通过信号的相位控制,在空中合成一个调制信号给飞机,飞机经过解调获知导航台的方位信息。
空管Thales二次雷达接收机设备原理与维修案例剖析

社。 2 0 0 2 .
( 2 ) 射频信号产生器 , 模拟 1 0 9 0 M H z 的应答信 号从接收机的射频端 口灌入 。 ( 3 ) 脉冲信号产生器 , 产生 T T L电平的脉冲信号 用 于调 制 l 0 9 0 MH z 载波 。 ( 4 ) 示 波器 , 用 于观 察接 收机 输 出的原 始视 频 。 ( 5 ) 频谱 仪 , 用 于测 量 2 0 0 MH z以上 示 波 器不 能 探 测 到 的信号 功率 值 。 ( 6 ) 万用表以及焊台等维修工具 。 T h l a e s 二次雷达接收机维修平台框图如图 4 所示。
E q u i p me n t Ma n u f a c t u r i n g T e c h n o l o g y No . 2, 2 01 5
过 数 据 选择 开关 、 A P D 电路 后 进 入 到 角 度 误 差 测 量 2 0 0 5年 ,中南 地 区 4套 T h l a e s 二次 雷 达 系统 相 ( O B A) / 对数 视频 处理 电路 。 在 该 电路 中 , 对 ∑、 △、 n 继投入使用。截止 目 前, 该 型号二次雷达已出现了 7
个接 收机故 障模块 ,我司成功快 速地修 复了其 中 6 个 接 收机 。 6个故 障接收 机 在现 场 的故 障情 况基 本 一 致 ,即雷达站本地 的雷达监控界面上显示该接收机 模块红色告警 , 告警信息为 Q R S L S 错误 , 对应通道转 维护 状态 。
通过利用本公 司 自主搭 建的维修平 台进行检测 与维修 ,发现上述发生故障的接收机其故 障原 因大 概可 分 为 以下两 类 : ( 1 ) 无 原 始 视 频 输 出 。 利 用 示 波 器 逐 级 测 量 2 0 0 M H z 以下的信号 , 未能观察到脉 冲或 1 0 M H z 以 及 1 1 0 M H z 两级中频信号的波形 。最终通过频谱仪 测 量 发 现 , ∑、 △、 Q 三 个通 道 的 1 2 0 0 MH z 第 一 级 本振信号均已发生频偏 , 且频偏超过 3 d B带宽。因此 混 频 得 到 的第 一 级 中频 信号 经 过 匹 配滤 波 器 后 已被 3 T h a l e s二次 雷 达接 收 机 故 障维 修 方 法 与 完 全 滤 除 ,最 终 导 致 无 原 始 视 频 输 出 。 由于 1 2 0 0 案例分析 M H z 的第一级本振信号来 自于频率合成部分 ,根据 T h a l e s 二 次雷 达接 收 机结 构精 致 , 光 是 整个 接 收 频率合成的工作原理进行线路跟踪 ,最终通过更换 机模块的紧固螺丝就有上百颗 。系统设计复杂, 采用 已损 坏 的芯 片来 修 复这一 类 故 障 的接 收机 。 ( 2 ) 有 原始 视 频 , 但 信号 幅 度偏 低 且 波形 杂 乱无 了大 量 的贴 片 电子 元 器件 , 维 修难 度极 高 。用 万用 表 故 障也 比较 难 于 对板上的元器件进行静态测量的传统维修手段是无 章 。发生 这一 类 故 障的情 况 比较 多 , 因为 ∑、 △、 n 三个通道都有这种情况 , 只能确 法修复该故障接收机的。因此 , 必须针对该接收机 的 定位。 设 计 特 点及 其 工 作原 理 ,利用 直 流 稳 压 电源 和相 关 认故障源处于模块 中的公共部分 。通过仔细研究 厂 的仪器仪表 ,来搭建 一套类似现场应用的接收机维 家所提供的技术资料 ,测量并分析电路 中各个参考 信号电平等参数 , 最终将故障 修平 台,结合现场出现的故障现象进行维修 。搭建 点或芯片管脚 的电压 、 通 过更 换 相关 的问 T h a l e s 二 次 雷 达 接 收 机维 修 平 台所 需 要 的 物 品及 其 源定 位 于增 益反 馈 电路 。同样地 , 题元器件也可快速地修复这一类的故障接收机 。 用 途 如下 : ( 1 ) 直 流 稳压 电源 ,为接 收 机 提供 6 V、 1 1 V和
关于雷达物位计跳变说明及解决方法

2
有凝露水汽出现在雷达防尘罩表面,也会使雷达无法全部发射物料表面。
1,去掉防罩,雷达稍微斜一点安装,2,雷达加吹扫功能、
3
被测物料堆角非常大,雷达反射面不平整。
1,ห้องสมุดไป่ตู้加软件滤波时间,
4
物料有挂壁现像,有时物料会倒塌,输出料位在下降过程中出现又变高了。
正常现像,雷达无需更改
5
安装位置不合适或仓内有其它金属干扰物
雷达检测原理
雷达物位计是利用微波反射原理,通过计算微波行程时间来测量物位的。雷达发射的电磁波信号类似手电筒照射光束一样,以光速传播,遇到物料后,电磁波信号返射回来,雷达通过计算发射信号到接收信号的时间差来计算物位的。
雷达输出跳变原因分析表:
原因
解决办法
1
粉尘较大时,雷达波无法穿透粉尘层。
1,负压、2,雷达加吹扫功能、3,按重锤。
THALES雷达受到干扰原因分析
THALES雷达受到干扰原因分析摘要雷达是一种利用电磁波探测目标的电子设备。
杂波、干扰和噪声是影响雷达工作的主要因素。
近几年无线摄像头的使用,干扰雷达设备。
从雷达探测目标的根本原理出发,找到雷达受到干扰的根本原因,根据不同雷达之间工作方式的不同,分析雷达抗干扰的能力。
关键词雷达;无线摄像头;干扰;假框架大连地区使用THALES雷达为管制员提供雷达信号,而且青岛、北京也引接该路雷达信号。
因此,这部雷达信号质量的好坏对于这三个地区的管制工作具有重要意义。
但无线摄像头的使用,影响了THALES雷达的正常工作,给THALES 雷达构成了干扰。
干扰强度不同,对THALES雷达的影响表现形式有所不同,严重干扰可引起接收机过载,导致雷达无法正常工作;干扰强度较弱时,仅在IRIS原始视频显示系统有信息提示,而在其他监控终端没有告警信息;而有些干扰,虽然LTM设备没有告警信息,却在自动化系统中表现为假目标过多,有掉牌现象,为了让整个系统正常工作,受干扰雷达不能引接入自动化系统。
1THALES雷达受到干扰统计自从THALES雷达投入使用至今,多次受到外界干扰,现将受到干扰的时间、干扰的现象及干扰的类型统计如表1所示。
统计数据表明,无线摄像头是干扰THALES雷达设备的主要因素,在处理过程中发现,这些干扰雷达设备无线摄像头的工作频率设置在1090MHZ附近,与二次雷达接收频率相同,造成二次雷达设备的同频率干扰。
由于所有二次雷达的接收频率都在1090MHZ,这一频率是绝对禁止其他无线电设备使用的。
当确定雷达受到干扰时,需要请当地无线电管理委员会进行排查处理,由于干扰的复杂性,需要较长的查找时间,因此很长一段时间雷达不能正常工作。
2THALES雷达干扰形成原因分析2.1无线摄像头干扰形成雷达干扰的原因多种多样,既有雷达自身元器件形成的内部干扰,又有其他雷达对其构成的异步干扰,还有其他外界环境形成的串扰。
其中,无线摄像头对雷达造成干扰是由于形成多于雷达处理能力的假框架。
关于导航设备故障排除思路及方法的探讨

关于导航设备故障排除思路及方法的探讨【摘要】根据实际工作,探讨空管导航设备在运行过程中出现故障时如何快速有效的定位故障原因,提出相应的故障排除思路与方法。
以当前主流的THALES设备为例,为相关型号以及其他相似设备的日常维护的排故提出一些参考。
【关键词】导航故障定位目前陆基导航设备仍然是国际通用的民航导航设备,它的作用是向空中发射无线电导航信号,飞机通过机载接收设备接收导航信号,并且依据该信号的指引使飞机沿正确方向飞向跑道最终实现安全着陆。
本文主要阐述了四字要诀的总体排故思路以及二分法、特征参数法和原理分析等排故方法。
1.故障排除总体思路“望闻问切四字,诚为医之纲领”。
通过总结,我们同样可以利用四字要诀来对设备故障进行整体排查。
望字诀,主要包括:查看设备的状态指示灯是否正常,查看附属设备包括UPS、空调、避雷器等是否正常,查看室外天线单元包括天线阵子、保护区草高、近场监控天线、射频电缆等是否正常,查看天气情况诸如雨天机房是否出现漏水现象,查看机房温湿度是否正常。
闻字诀,主要包括:设备机房是否有烧焦的味道,室内机房是否有死耗子的味道问字诀,主要包括:查询近期设备运行状态,查询近期天气情况,询问近期飞机接收设备信号情况。
切字诀,主要包括:利用仪器仪表对设备进行检查测量,利用设备软件监控界面及自检功能对设备进行分析检查。
2.故障排除方法及案例解析二分法,顾名思义就是将设备故障定位一分为二,目前导航设备都包括发射机部分和监控部分,所以首先我们可以确定故障原因是发射机通道部分还是监控通道部分。
对于发射通道部分我们又可以通过二分法来定位故障是在室内主机部分还是室外天线发射单元部分,同理对于监控通道部分我们也可以通过二分法来定位故障是在室内监控部分还是在室外监控单元部分。
下面我们以盲降设备为例进行分析:图1如图1所示,此时一号机正常,我们能够得出公共部分天线发射信号信号、监控器正常,而二号机监控数据和测量数据均不正常,从而可以判断故障位于室内二号机发射通道部分。
雷达信号跳变对自动化系统的影响和解决办法探讨

雷达信号跳变对自动化系统的影响和解决办法探讨雷达信号的跳变是指雷达接收到的信号在时间上发生了突变或者突然中断的现象。
这种跳变会对自动化系统产生一系列的影响,包括系统的测量精度降低、系统的稳定性下降、系统的故障率增加等。
解决雷达信号跳变问题对于自动化系统的正常运行具有重要意义。
雷达信号的跳变会导致系统的测量精度降低。
由于信号的跳变,系统在测量对象的位置、速度等参数时可能会出现误差。
这会对自动化系统的控制精度造成影响,甚至可能导致系统不能正确地进行控制。
解决这个问题的方法之一是通过增加多个雷达传感器进行测量,然后对这些数据进行融合处理,从而提高系统的测量精度。
雷达信号的跳变还会增加系统的故障率。
当雷达信号突然中断时,自动化系统可能会误判当前环境,从而产生错误的控制指令,导致系统无法正常工作。
解决这个问题的方法之一是设置备用雷达传感器,并在信号跳变时自动切换到备用传感器进行测量。
这样可以在主雷达信号发生跳变时保证系统的正常运行。
值得注意的是,以上方法只是解决雷达信号跳变问题的一些常见方案,具体的解决方法还需要根据实际情况进行调整和改进。
为了更好地解决雷达信号跳变问题,还需要关注对雷达系统的维护和调试,及时修复故障设备,确保系统能够正常工作。
雷达信号的跳变对自动化系统产生了负面影响,包括系统测量精度降低、系统稳定性下降和系统故障率增加等。
为了解决这个问题,可以采取增加传感器、引入预测控制算法和设置备用传感器等方法。
具体的解决方案还需要根据实际情况进行调整和改进。
对雷达系统的维护和调试也是保证系统正常运行的关键。
二次雷达同步窜扰问题分析及解决办法

二次雷达同步窜扰问题分析及解决办法二次雷达同步窜扰(Secondary Radar Synchronization Interference)是指雷达系统在接收到发射的主雷达信号后,由于同步系统错误导致的信号干扰问题。
这种问题可能会导致雷达系统的性能下降,甚至可能误报目标信息,对雷达工作产生负面影响。
对二次雷达同步窜扰问题进行分析并找到解决办法是非常重要的。
二次雷达同步窜扰问题主要有以下几个方面的原因:1.同步系统误差:同步系统的误差是导致二次雷达同步窜扰的主要原因之一。
同步系统误差会导致接收到的信号与主信号的同步不准确,进而引发信号的干扰。
2.干扰源:除了同步系统误差外,还有其他一些干扰源也可能引发二次雷达同步窜扰问题。
周围环境中的无线电干扰源、其他雷达系统等都可能对二次雷达信号产生干扰。
针对二次雷达同步窜扰问题,以下是一些解决办法:1.同步系统优化:改善同步系统的性能,减小同步误差,可以有效降低二次雷达同步窜扰的风险。
对同步系统进行优化可以包括改善时钟稳定性、减小时延等手段。
2.信号处理算法改进:通过改进二次雷达的信号处理算法,可以更好地抑制同步干扰。
可以采用自适应滤波器、时域滤波器等方法来滤除同步干扰。
3.增加抗干扰能力:在设计和构建二次雷达系统时,考虑到干扰源的存在,并增加一定的抗干扰能力。
可以采用干扰检测和抑制技术、全程自适应抗干扰等手段来提高系统的抗干扰性能。
4.合理规划雷达系统工作频率:合理地规划雷达系统的工作频率,避免与其他雷达系统或无线电干扰源频率发生冲突。
通过频率规划,减小同频干扰的发生,从而降低二次雷达同步窜扰的风险。
对二次雷达同步窜扰问题进行分析和解决办法的探讨可以帮助我们更好地理解和应对这一问题。
通过优化同步系统、改进信号处理算法、增加抗干扰能力以及合理规划工作频率等手段,可以有效降低二次雷达同步窜扰问题的发生,提高雷达系统的可靠性和性能。
雷神雷达方位分配单元故障维修实例
雷神雷达方位分配单元故障维修实例作者:朱鑫鑫来源:《中国新通信》2014年第03期【摘要】随着民用航空运输事业的迅速发展,国内空中交通管制方式已经由原有的计划管制逐渐发展到部分空域实行雷达管制。
雷达作为空中交通通信导航监视系统的重要组成部分,对监视空中飞行目标起着非常重要的作用。
在维修雷达设备过程中,面对雷神雷达方位分配单元故障,如何准确地分析、判断故障点,采取有效措施快速恢复雷达设备正常工作,对于确保空中交通安全有着重要的意义。
【关键词】雷达设备方位单元编码器珠海空管站目前使用的是雷神一、二次合装系统,其中一次雷达是由雷神加拿大公司生产的S-BAND ASR-10SS型监视雷达,二次雷达是由英国Cossor公司生产的CONDOR MK 2A型单脉冲二次监视雷达。
一、故障现象本次故障发生时,一次雷达系统由于某些原因处于停机状态。
值班员发现二次雷达A、B 通道不停地互相切换,当某一通道处于在线工作状态时,工作时间持续不到20秒,就会发生告警,然后自动切换到另一通道工作,如此不停的循环。
而在RMM上可以发现,在两通道切换的时间段内信号中断。
在SCDI上进行检查,发现二次雷达A/B通道的视频时钟板和应答解码器告警。
同时在APG功能模块发现方位单元的X、Y编码器均显示为灰色。
二、故障分析根据告警代码和故障现象的提示,做出如下判断:(1)虽然告警代码显示视频时钟板和应答解码器告警,但是由于A/B通道告警状态都一样,而两个通道的视频时钟板和应答解码器板同时发生故障的可能性并不大,因此初步判断故障点并不在这两块告警的板件上,而是由于其他相关故障导致了这两个板件的告警现象。
(2)APG功能模块的X/Y编码器状态显示不正常,因此应首先从方位单元进行检查。
三、故障排除根据上述判断,用示波器在方位单元输入模块I-422的输入端对X/Y编码器送来的三个方位信号进行了测量,结果发现X编码器送来的两个方位脉冲信号ACP(I)和ACP(Q)波形都严重失真,而Y编码器送来的三个信号检测都正常。
THALES雷达监控系统校时的改进方案
补了监控系统的缺陷。
关键字:监控系统;校时;STM;LTM;THALES 雷达
中图分类号:V19
文献标识码:A
文章编号:2096-4706(2021)04-0035-04
Improved Scheme of THALES Radar Monitoring System Timing
FENG Falong (China Civil Aviation Central South China Air Traffic Administration Hubei Branch,Wuhan 432200,China)
THALES 雷 达 监 控 系 统 由 STM、LTM 和 传 输 组 成, LTM 是双网卡配置,LTM 和雷达通道通过网络相连,通过 网卡 1 实现相互通信,通过网卡 2,LTM 上的 DRU 单元将 监控数据重组后通过传输发送给 STM,本文主要介绍的就
收稿日期:2021-01-09
是 RCMS 网络的时间同步过程。
Hard Disk 9A2D
VME Bus
IDSC 5A2X
to MMX
SSR MODULATOR EXTRACTOR
DATA PROCESSOR COMPUTERS
TIME STAMPING
(b)单通道告警现象
miniHub 2 9A1J
uLINES #1 9A1L
CPU #2 TriEth
CPU #1 TriEth
(c)单通道内部告警现象 图 1 告警现象实示例
1.3 故障分析
1.3.1 THALES 技术手册校时原理 经过查阅 RCMS 手册,手册上介绍 RCMS 网络的时间 是由 DRU 单元统一管理的,定期更新 RCMS 网络上主机 的时间 [1],即 STM 和 LTM 的系统时间,保证时间的一致 性,不需要人工去对 RCMS 网络上的时间进行人工对时。 经过实际测试发现,STM 和 LTM 时间偏差不大的情况下, DRU 可以对 RCMS 网络上的时间进行对时,但是如果时间 偏差过大,DRU 不能对 RCMS 网络上的时间进行对时,时 间偏差过大就会出现监控告警或者远程监控中断的现象; 如果时间偏差过大,需要人工去对 RCMS 网络上的时间进
Thales DME435型导航设备隐患排除实例

Thales DME435型导航设备隐患排除实例Thales DME435型导航设备是飞行器上常用的一种导航设备,它可以通过一系列的信号来确定位置并进行导航。
在实际使用中,有时候会出现一些隐患问题,影响设备的正常使用。
本文将介绍一些关于Thales DME435型导航设备隐患排除的实例。
1. 隐患问题描述Thales DME435型导航设备通常由于长时间的工作或者是过于频繁的使用导致一些隐患问题的出现。
常见的隐患问题包括设备反应速度变慢、信号接收不稳定、导航准确性下降等。
这些问题会直接影响到飞行器的安全性和准确性,因此需要及时排除。
2. 排除方法2.1 清洁维护Thales DME435型导航设备通常使用一段时间后会积累一些灰尘或者污垢,导致设备的信号接收不稳定。
定期进行清洁维护是非常重要的。
可以使用专门的软刷和擦拭布对设备进行清洁,清除设备表面和接口的灰尘。
可以使用专门的清洁剂对设备进行清洁,清洁剂不仅能够去除污垢,还可以保护设备表面。
2.2 调整信号接收Thales DME435型导航设备在接收信号时需要确保信号的稳定性和准确性,因此需要对信号进行调整。
可以检查设备的天线和接收器是否有松动或者损坏的情况,并及时修复或更换。
可以尝试对设备进行信号接收的调整,根据设备的说明书进行相应的操作。
2.3 硬件升级有时候Thales DME435型导航设备的隐患问题是由于硬件老化或者设备版本过低所导致的。
需要进行硬件升级。
可以联系设备厂家或者相关服务商,进行设备的硬件升级,提高设备的性能和稳定性。
3. 实例分析某飞行器上的Thales DME435型导航设备出现了信号接收不稳定的问题,经过检查发现是设备表面和接口积累了大量的灰尘,导致了信号的不稳定。
为了解决问题,飞行器上的维护人员首先进行了清洁维护,并使用了专门的清洁剂进行清洁,清除了设备表面和接口的灰尘。
随后对设备进行了信号接收调整,确保信号的稳定和准确。
Thales DME435型导航设备隐患排除实例

Thales DME435型导航设备隐患排除实例Thales DME435型导航设备是一种距离测量仪(Distance Measuring Equipment),用于航空器的导航和定位。
这种设备在使用过程中可能存在一些隐患,需要进行排除以确保导航的准确性和安全性。
一种可能的隐患是设备的电源故障。
如果电源不稳定或供电中断,DME435就无法正常工作,导航信息将无法获取。
为了排除这个问题,我们需要检查电源线是否连接良好,电源系统是否正常工作,并且可以考虑备用电源系统以确保在电源故障的情况下设备的正常运行。
另一个潜在的问题是设备的接收性能。
如果设备的天线与其他设备或结构物之间的距离过近,可能会发生信号干扰,导致导航数据的失真。
为了解决这个问题,我们需要确保天线安装位置正确,并且与其他设备和结构物保持适当的距离。
设备的频率稳定性也是一个重要的问题。
如果设备的频率不稳定,将导致测量结果不准确。
为了解决这个问题,我们可以定期校准设备的频率,并进行必要的维护和修理,以确保设备的正常运行。
另一个可能的问题是设备的显示屏故障。
如果设备的显示屏损坏或故障,导航员将无法正确读取导航数据。
为了避免这个问题,我们需要定期检查和维护设备的显示屏,并在需要时更换故障的部件。
设备的接口问题也是需要注意的。
如果与其他设备或系统的接口出现问题,设备可能无法正常工作或获取正确的导航数据。
为了解决这个问题,我们需要确保设备的接口与其他设备和系统兼容,并定期进行测试和校准。
Thales DME435型导航设备在使用过程中可能存在一些隐患,需要进行排除以确保导航的准确性和安全性。
这需要对设备的电源供应、接收性能、频率稳定性、显示屏故障和接口进行检查和维护,以确保设备的正常运行。
雷达液位计常见故障及解决方法及维护和修理保养

雷达液位计常见故障及解决方法及维护和修理保养雷达液位计属于通用型雷达液位计,它基于时间行程原理的测量仪表,雷达波以光速运行,运行时间可以通过电子部件被转换成物位信号。
探头发出高频脉冲并沿缆绳传播,当脉冲碰到物料表面时反射回来被仪表内的接收器接收,并将距离信号转化为物位信号。
在生产过程中,人们每每会由于对这种新型仪表缺乏充分的谙习以及故障处理方法,在不能适时有用解决雷达液位计的故障的时候加剧雷达液位计的故障,本文就是依据雷达液位计故障常见的题目提出了一些解决方案,接受理论分析和现场试验结合的方法,简要阐述了造成液位计故障的原因起因,通过分析论证了故障产生的原因起因,zui终总结出一些雷达液位计故障处理的方法。
1、测量值存在误差故障表现为实际液位和测量值的变化趋势一致,但数值不相等。
这是一种常见的、较单纯又简单除去的故障。
接受传统的绳测法测量真实的上空距离,假照实测值与仪表显示上空距离相一致,证明仪表本身品质没有问题。
由雷达液位计的工作原理可知,实际液位由空罐距离E 减去测量参考点到介质表面的距离D 求得,因而空罐高度必需精准无误才能保证测量精准牢靠,所以,在标定前必需实地测量,以取得zui真实的数据。
假如仪表接入计算机系统,还应检查仪表满量程参数和计算机组态数据是否一致。
2、测量值明显失真故障表现为液位变化而测量值恒为常数,当储罐排空或将满时仪表保持一个明显的假料位,也或者表现为槽罐内物料将满时显示弹回一个低值。
造成这类故障的通常是以下原因:(1)天线结疤。
厚而湿的结疤会对微波产生猛烈的反射,使仪表测量值保持一个恒定的高液位值。
(2)料排空时天线或相近的凝集物产生干扰回波。
(3)物料排空时槽罐内固定组件引起猛烈回波。
针对上述情况应实行以下方法进行解决:(1)认真清理天线和天线相近的附着物。
(2)激活并合理地设置“窗口抵制”距离。
“窗口抑制”也称为“近现场抑制”,此功能用以除去安装法兰焊缝、天线或其相近挂料对测量的影响,是优化测量的一种有效手段。
雷达信号跳变对自动化系统的影响和解决办法探讨

雷达信号跳变对自动化系统的影响和解决办法探讨雷达信号跳变是指雷达接收到的信号突然发生变化,例如幅度突然增大或减小、频率突然改变等。
这种跳变可能是由于雷达系统本身的问题导致的,也可能是由外部干扰或其他因素引起的。
无论是什么原因引起的,雷达信号跳变都会对自动化系统的正常运行产生影响。
本文将探讨雷达信号跳变对自动化系统的影响以及可能的解决办法。
雷达信号跳变对自动化系统的影响是导致系统测量误差增大。
由于雷达信号突然发生跳变,系统无法准确测量目标和环境参数,进而影响对系统状态的判断和控制。
特别是在需要实时监测和控制的自动化系统中,测量误差的增大将导致系统的响应速度下降,甚至引起系统的不稳定。
雷达信号跳变还会导致系统的误报和漏报。
当雷达信号突然发生跳变时,系统可能错误地判断目标的位置、速度等参数,进而误报目标或漏报目标。
这将导致系统的准确性降低,不仅影响系统对目标的追踪和定位,也可能导致对非目标物体的误报和误判,从而干扰系统的正常运行。
雷达信号跳变的解决办法可以从多个方面来考虑。
可以对雷达系统进行校准和调试,以减小或消除系统本身引起的信号跳变。
通过仔细检查系统的硬件和软件配置,发现并修复潜在问题,可以提高系统的稳定性和精度。
可以采用信号处理技术来抑制或消除来自外部干扰的信号跳变。
通过设计和实施合适的滤波算法,可以减小外部干扰的影响,提高系统抗干扰能力。
可以采取多信号融合的方法,结合多个传感器的测量结果,以提高目标检测和跟踪的准确性和可靠性。
可以考虑采用故障诊断和容错措施来应对雷达信号跳变。
通过建立系统的故障诊断模型和容错控制策略,可以及时发现和处理信号跳变等故障,并保证系统的安全运行。
可以设置相应的检测和纠正机制,及时校正测量误差,以保持系统的稳定性和精度。
定期维护和保养雷达系统也是解决信号跳变问题的重要措施。
定期清洁和检查雷达设备,以确保其正常运行。
及时更新系统的软件和固件,以修复可能存在的漏洞和问题,提高系统的抗干扰能力和稳定性。
THALES雷达机柜供电故障排查及分析
• 46•民航重庆空管分局铁岗咀雷达站Thales RSM970S 二次雷达通道1运行期间突然故障告警并无法重启。
经雷达技术人员根据故障现象判断为供电故障,并通过分析整个供电链路,发现由于机柜温控开关故障,供电相关的某个继电器和直流供电组件损坏,导致通道无法启动的,针对此次故障并紧急采取措施使通道恢复,并分析故障原因和给出故障排查建议。
随着社会的发展,人民生活水平逐渐提高,越来越多的人将飞机作为出行的首选方式。
同时,重庆江北国际机场作为中国枢纽机场之一,航空保障任务越来越艰巨。
航管二次雷达作为空中交通管制的重要设备,管制员通过二次雷达获得飞机的位置、高度等信息,对空中飞机进行监视和指挥,保证空中飞机安全。
目前重庆机场本场仅有铁岗咀雷达站的THALES 雷达系统和一碗水雷达站的SELEX 雷达系统,雷达的安全对机场运行尤为重要。
目前,雷达系统均为双通道配置,正常工作时一通道在线运行,另一通道作为热备份,以应对在线通道出现突发故障可无缝切换至备份通道。
因此雷达系统所有组成部分最大限度实现冗余配置,来降低运行风险。
本文从重庆空管分局THALES RSM 970S 二次雷达某次故障出发,给出故障排查思路并分析故障原因,并采取应急措施,为同行针对此类问题提供一些分析思路和解决措施。
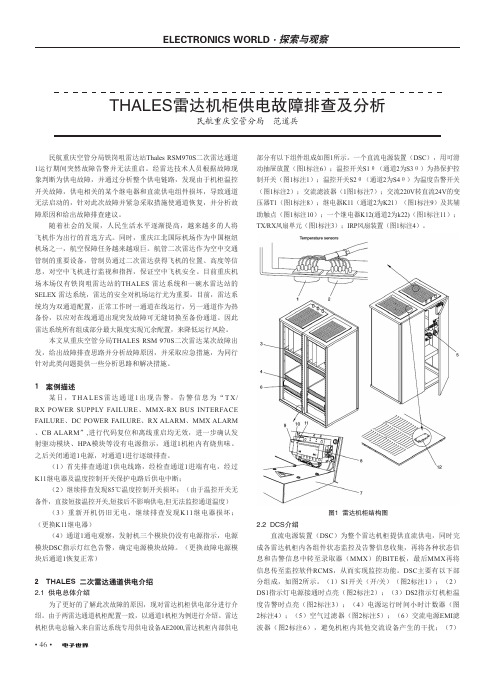
1 案例描述某日,TH A LES 雷达通道1出现告警,告警信息为“T X/RX POWER SUPPLY FAILURE 、MMX-RX BUS INTERFACE FAILURE 、DC POWER FAILURE 、RX ALARM 、MMX ALARM 、CB ALARM ”,进行代码复位和离线重启均无效,进一步确认发射驱动模块、HPA 模块等没有电源指示,通道1机柜内有烧焦味。
之后关闭通道1电源,对通道1进行逐级排查。
(1)首先排查通道1供电线路,经检查通道1进端有电,经过K11继电器及温度控制开关保护电路后供电中断;(2)继续排查发现85℃温度控制开关损坏;(由于温控开关无备件,直接短接温控开关,短接后不影响供电,但无法监控通道温度)(3)重新开机仍旧无电,继续排查发现K11继电器损坏;(更换K11继电器)(4)通道1通电观察,发射机三个模块仍没有电源指示,电源模块DSC 指示灯红色告警,确定电源模块故障。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 ・ 1故 障告 警
4 维 修 总结
2 0 1 1年 4月 份 以 来 ,A DU频 繁 出 现 ( 1 )熟 悉雷达 系统 的工作 原理、方框 图、 以及 1 个处 理天 线方 位 角数据 的方 位接 口板 “CONFI GURATI oN CHANGE” , “ADU 功能模块的信号流程及其 内部组成 。这样将 有 ( 2 A0 2板 ),有 自动 切换 功能 ,并保 证可 连 N0G0 ”, “ E NC ODE R NOG O”等 ,影响设 利于从根本上分析出现 问题的原因所在。 续性 的工作 。每 个通道均有 一个 A DU 单元, 备的正常运行 。 ( 2 )熟悉 T H A L E S雷达设备模块 工作 性 每个 ADU包含一 个 电源卡 和一个接 口卡 ( 如 3 . 2 排 除 过 程 能监控软件的使用 。一般设备 出现 故障,监控
出现编码 器 N0GO状态 信 息即工作 状态 不正 确 :存在位 检 查或 奇偶 校验 连 续 8次 不正 确
雷达 系统 安装 调试 后默 认其 周期 容差 是
5 O %,也 就 是 说 AC P周 期 T可 以在 ( 1 2 2  ̄ S 3 6 6 r t S )之 间。但是 ,绝 对编码 器 的 AC P检
则周期容错率符合系统设置 ,若第 8 个 触发脉 冲出现才检测到编码器输 出信 号的存在 位,就 会产生很大 的误差 。故经过讨论 ,认 为修改系 统容错率来解决方位信号告警 ,由原来 的 7 5 % 改至 8 7 . 5 %,通过运行观 察, 自动切换 频率 明 显减少 ,但 是还是 时有 发生,说明并没有解决 根本 问题 。
图 1 )
界面 都会 出现 设备 告警 代码 及其 设备 错误 描
步骤 l :根据告警状态信 息,对可 能直接 引起 故障产 生的接 口板 卡 2 A0 1 , 2 A0 2接 口卡 ,
的误 差
重庆 T H A L E S雷 达 A D U( A z i
m u t h D i S t r i b u t i o n U M t) 方 位
分配单元 经常 出现 方位 信号告 警, 导致 通道 切换 频繁 并影 响 到设备 的正 常 工作 ,本 文从 雷 达方 位信 号质 量 的检 测与 实 际工作 中遇 到 的 问题 进行 分析 ,供 大 家交 流和 参考。
【 关键词】T h a l e s A D U A C P A R P
1前言
效: ( 1 )存在位检查 。 ( 2 )奇偶校验检 查,
众 所周 知, 雷达在 空 中交通 管理 中起 着 越来越 重要的作用,稍有不慎 ,就会引起管制 模式的改变,特别是在重庆江北 国际机场飞行 架 次 陡增 的情 况下 ,是坚 决不 允许 的 。然 而 T HAL E S雷 达于 2 0 1 1 年 4月 以来 陆续 出现 的 ADU频繁 自动切 换,给设 备正 常运行 带来 了 很大 的风险。本文就 AD U 出现的频繁 切换甚
0 - 1 6 3 8 4范围 内的数量变 化来实 现的,具体 调 整 的值 可 以通过 ADU单 元 2 A 0 2板上 的 S 7 一
.
2 A D U 的基本作用
2 . 1设 备 组 成
S 4四个拨码开关 来得到 ,通过 设置就可 以实
现 AC P信号与天线正北方位的匹配。
3故障 出现及发现故 障根源过程
通信技术 ・ C o mmu n i c a t i o n s T e c h n o l o g y
T H A L E S雷达 A D U( 方位分配单 元 )频繁切换通道 的解决 方法
文/ 朱东超
P OW E只SUPP L Y U NI T S
编码器没有解决,但 大致
可 以确定故障是由于系统 对 方 位 信 号 的 检测 所造 成
~
或者 出现 一次 不正确 的编 码 器零刻 度检 查 ;
而满 足下例 情况 ,编 码器 状态信 息重 新 转为
G O 即工作状态正确 信息 :连续 2次正确的零 测逻辑 是连续 8次编码 器输出信号的存在位没 刻度检验 或者连 续 1 6 次正确 的存在位 检查或 有. 才报告A C P出错,这样假若系统产生的第 1 个 触发脉冲 出现 并检测到编码 器输 出信号 , 奇偶校验检 查。
步骤 3 : 我们 知 道 ,
雷达 l 4位 绝对 式编码 器
主要使用 串行 S S I 同 步
输 出。 以两 根 数 据 线、 两 根 时 钟线 连 接 , 由接 收 设备 向编 码 器 发 出 中 断 的 时 钟脉 冲 ,绝 对 的 位 置值 由编 码 器 与 时钟 脉 冲 同 步输 出至接 收设 图1 :A D U的组成 备 。 由接 收 设 备 发 出 时 钟信 号触 发 , 编码器从低
A RP信 号 的 NO G O和接 口卡 N O G O告警 的 不正常情况进行分析和论述 ,以及论述排查 引
起频繁切换 的旋转铰链 的故 障进行 分析 。希望 本文对于今后 出现类似 的故 障能有所启 发,能 为设备维护提供一些有益的经验 。
位( L S B ) 开 始输 出与 时 钟信 号 同步 的 串行 信
号。
( 3 ) 天线每 旋转一圈的编码 器零刻度位检 查。
当下 例 情 况 出 现 时 ,A J ) U面 板和 R CMS上 会
1 4位 编 码 器 A CP 的 周 期 - 4 S / 2 1 4 =
2 4 4 1 x S。