Modeling and numerical simulation of solar chimney power plants
AMESim_液压系统建模引发的数字挑战s
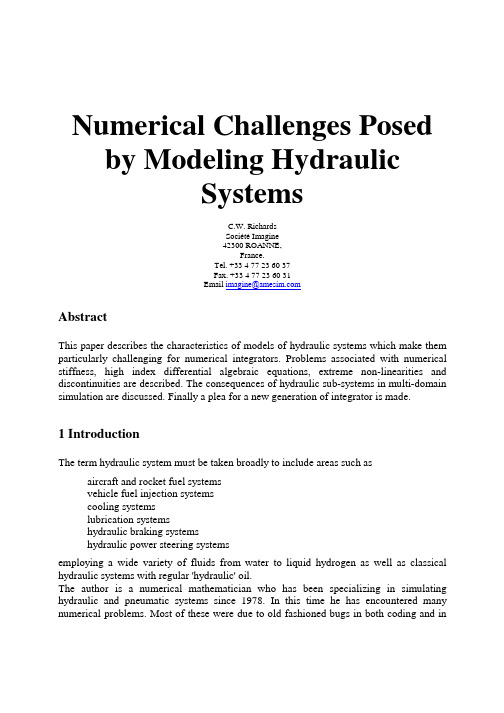
Numerical Challenges Posed by Modeling HydraulicSystemsC.W. RichardsSociété Imagine42300 ROANNE,France.Tel. +33 4 77 23 60 37Fax. +33 4 77 23 60 31Email imagine@AbstractThis paper describes the characteristics of models of hydraulic systems which make them particularly challenging for numerical integrators. Problems associated with numerical stiffness, high index differential algebraic equations, extreme non-linearities and discontinuities are described. The consequences of hydraulic sub-systems in multi-domain simulation are discussed. Finally a plea for a new generation of integrator is made.1 IntroductionThe term hydraulic system must be taken broadly to include areas such asaircraft and rocket fuel systemsvehicle fuel injection systemscooling systemslubrication systemshydraulic braking systemshydraulic power steering systemsemploying a wide variety of fluids from water to liquid hydrogen as well as classical hydraulic systems with regular 'hydraulic' oil.The author is a numerical mathematician who has been specializing in simulating hydraulic and pneumatic systems since 1978. In this time he has encountered many numerical problems. Most of these were due to old fashioned bugs in both coding and inthe underlying model. However, there have been other persistent problems which have to be attributed to the intrinsic nature of hydraulic systems. What are these special characteristic of models of hydraulic systems from a numerical point of view? Briefly the governing equations are numerically stiff, very non-linear, can have high index differential algebraic equations and are often modeled with discontinuities.It is interesting that during meetings for the Toolsys project [1], the author in conversation with designers of multi-body and electrical software has heard almost identical characteristics attributed to these domains. Does this mean that there is no significance difference between the numerical characteristics of these domains? In the following sections the author attempts to show that there is.Problems related to pneumatic systems are also mentioned briefly.2 Hydraulic systems are multi-domainA hydraulic system in isolation is singularly useless. It is necessary to do something with the hydraulic power. In practice this means moving some mechanical system. In addition it is necessary to control the hydraulic system. As a consequence even the simplest hydraulic systems will normally contain multi-body and control elements as well as hydraulic elements.In consequence the solver must to some extent have a multi-domain capability. However, the 'foreign' domain elements are normally relatively simple. In the AMESim hydraulic software produced by Imagine, much effort has been extended in tuning the integrator to hydraulic systems.3 Fluid PropertiesFundamental to the modeling of hydraulic systems are the fluid properties density, bulk modulus and viscosity. The hydraulic fluid will almost always contain air. This may be dissolved and/or free in the form of bubbles. At higher pressures the air will eventually become dissolved. At low pressure bubbles will form leading to a phenomenon known as air release. The process is relative slow (compared with cavitation) and with many systems the fraction of the air that is free can be taken to be constant.Cavitation occurs when the pressure in the hydraulic fluid reaches the saturated vapor pressure. This is a much faster process than air release. Cavitation is very important because when it occurs, extensive damage can be done. Previously it was enough forsimulation to predict that cavitation occurred. Now users ask that it be quantitatively correct --- a very demanding requirement. If cavitation is present but not at too serious a level, a company may have a strong price advantage over a competitor that has chosen to eliminate cavitation completely and a strong reliability advantage over another that has severe cavitation.Figures 1 to 3 show fluid properties of diesel fuel between 0 and 1000 bar gauge pressure. The fractional air content is 0.1 % by volume. In fig. 2, the plot of bulk modulus, the presence of the air greatly modifies the value.Figure 1 DensityFigure 2 Bulk modulusFigure 3 Absolute viscosityFigures 4 to 7 show the plots for the pressure range -1 to 0 bar gauge. The dramatic effect of cavitation is evident in all these graphs. In particular the zoomed view in fig. 7 shows how as the liquid changes to vapor the bulk modulus becomes almost zero. As the integrator negotiates this region a lot of step size reductions and Jacobian re-evaluations will be necessary.Figure 4 DensityFigure 5 Bulk modulusFigure 6 Absolute viscosityFigure 7 Bulk modulusNote that, since all normal hydraulic liquids are not chemically pure, the boiling of the liquid does not take place at a single pressure but over a range of pressures. However, this range can be very narrow giving very non-linear fluid properties. Without careful rewriting, integrators cannot deal with these conditions.4 Implicit and explicit systemsWe can normally express the governing equations for a hydraulic system either by a system of ordinary differential equations (ODEs)),(y t f dtdy =or by a system of differential algebraic equations (DAEs) of the form0,,(=dtdy y t Fwhere t is time and y is the vector of state variables. For DAEs there is an important measure known as the index of nilpotency. In simple terms we can always convert DAEs to ODEs by differentiation and manipulation. The smallest number of differentiations required is the index of nilpotency. ODEs have index 0. Normally index 1 problems are easy to solve, index 2 problems more difficult and index 3 problems very difficult. This is because the Jacobian matrices employed to solve the systems of equations become progressively more badly conditioned as the index increases. With high index problems (certainly 3 and perhaps 2) it is not a good idea to employ very small integration steps.As will be shown in the next section, hydraulic system governing equations can be very stiff. This means that during the initial transient behavior, very small integration steps must be used. If there is also a high index, there is a natural conflict and failure is possible.At Imagine, where the AMESim fluid power software is produced, modelers take a pride in reducing the number of DAEs used to a minimum. Other AMESim users show no such restraint and the DAE solver DASSL is used almost all the time.For a discussion of nilpotency and the DASSL integrator see reference [2].5 Hydraulic systems as electrical circuitsIt is very easy to see the analogy between hydraulic systems and electrical systems. Engineering courses often stress this point. It is not surprising, therefore, to see attempts to deal with modeling and simulation of the two domains in the same way. Pressure is the same as voltage and flow rate the same as current. However, problems arise very quickly with this approach.When we join two hydraulic components we use a pipe or hose. The walls of this will expand with pressure (especially hoses) and the fluid has some compressibility (especially if it contains significant quantities of air). The most commonly used equation in hydraulic modeling is probablyV Q B dt dP ∑= 1where the time derivative of pressure is expressed in terms of the effective bulk modulus B, the volume V and the sum of the inflow Q . This equation is often used to model the compressibility effects in the pipe. Since B for a hydraulic fluid is of the order 91017x Pa, a very small time constant is introduced and the equations are numerically very stiff.In contrast we join electrical components by a wire. There is very little compressibility which is like saying B in equation 1 is infinity. Hence we use∑=0i2 This is a constraint equation whereas 1 is an ODE.Figure 8 Electrical system in AMESimFigure 8 shows an electrical system modeled using AMESim. (Some AMESim users do simulate electrical systems using AMESim.) By performing a linearization it is possible to compute the index of nilpotency which turns out to be 1.The hydraulic equivalent of equation 2 is∑=0Q 3This can be thought of as a pipe in which the effective bulk modulus is infinity or the volume is zero. This model is not without merit as using equation 1 with a very large value of B/V can give very slow simulation whereas switching to equation 3 speeds things up. Figure 9 shows an injection system in which there is a small volume, called the sac and indicated by V in the figure, next to the actual injection holes. It can be useful to model this using equation 3 resulting in faster simulation. The equations are index 2.Figure 9This model has been used internally at Imagine but has never been released as a standard AMESim model because it gets into big trouble when cavitation occurs. The problem is not just that it is index 2. Other index 2 problems are solved with contemptuous ease. The problem is that other factors are involved.If we determine a voltage V such that such that equation 2 is satisfied, there are no special restrictions on the voltage. Before convergence is obtained on an integration step, V may gets some quite extreme values. As long as convergence is obtained in the end, this is not a problem.In contrast if a pressure P is obtained using equation 3, there are fundamental restrictions on the values that P may have. We cannot have a pressure less that 0 absolute. Thus we have a combination ofan index 2 problem for which a very small step size is not a good idea;severe non-linearities in the fluid properties due to cavitation tending to reduce the integration step;restriction on the admissible value of pressure.These in combination reduce the reliability of the model.Pressure ultimately is not like voltage.6 Causal and acausal modelingThere has been some interest in recent years in acausal modeling and acausal libraries of hydraulic libraries have been proposed. Unfortunately many hydraulic components are not acausal by nature. The relief valve and check valve are good examples. If all we know is that the flow rate through them is zero, we cannot compute the pressure drop across them.A acausal model tries to get over this by assuming that these valves always leak [3]. However, real units do not suffer from this incontinent behavior and hence such modeling techniques are best avoided in hydraulic systems.7 Get the physics rightOne of the most common errors in modeling hydraulic system occurs in an orifice. All good text books on hydraulic systems give the flow rate Q through the orifice in terms of the pressure drop P ∆, density ρ, cross-sectional area A and a flow coefficient flow C asρ∆P C A Q flow 2.= 4The numerical problem with this formula is that the graph of Q against P ∆ has an infinite slope at the origin. This shows up as problems when P ∆ crosses zero. If a linearization is made at the equilibrium point, very strange results are obtained.It is often true with hydraulic systems that, if you get the physics wrong, you end up with numerical problems. The solution is simple. An orifice has linear behavior when P∆ is small. By modifying the model good results can be obtained.8 DiscontinuitiesIt is very convenient to include discontinuities in models of hydraulic and associated components. Strictly speaking a discontinuity involves a jump change in the value of a state variable and we could call this a hard discontinuity. These discontinuities will normally kill an integrator unless very careful coding is employed.An example of a hard discontinuity is in the model of a hydraulic jack in which, when the piston reaches the end of its stroke, the velocity comes instantaneously to rest. This implies a perfectly inelastic collision.Models where there is a jump change in the first or second derivative of a state variable are also used in models of hydraulic components. These 'soft' discontinuities can also give problems for the integrator.Most simulation software except multi-body software now have refined methods for handling discontinuities. For a description of running a mixed hydraulic multi-body system in a multi-body software see reference [4].9 Pneumatic systemsIn some respect modeling of pneumatic systems is easier than hydraulic systems since the governing equation are less stiff. The fluid properties are also less non-linear but the restrictions on pressures described in section 5 apply equally to pneumatic systems. In addition there are similar restrictions on temperature values.It is interesting that there is an ISO 6358 standard on the modeling of pneumatic orifices. Unfortunately the model described introduces precisely the problems described in section 7.10 Domain Specific IntegratorsAs mentioned in section 2 the integrator of AMESim has been extensively tuned for solving systems models of the domain for which it was designed. This is probably true of all electrical and multi-body software.In work for the Toolsys project the author has imported and run multi-body systems within AMESim. These were developed in COMPAMM [5]. Very simple examples ran with no problems but bigger systems required much manual adjustment to run parameters. The problem was that the multi-body sub-system model contained an iterative procedure employing a Newton type method to solve iteratively non-linear equations. The incomplete convergence of these iterations was seen by the AMESim integrator as noise which lead to much reduction in the step size, re-evaluation of Jacobians and very slow simulation. Some re-tuning of the integrator lead to very fast runs. Unfortunately this new state of tune proved very unsuitable for regular hydraulic systems.Experience running hydraulic systems created in AMESim within the Adams software [4] lead to a conflict in the needs of the two domains. The multi-body sub-system needed to avoid small integration steps whereas the hydraulic sub-system needed small step sizes. In addition all hard discontinuities had to be eliminated from the hydraulic sub-system model and in particularvalves which were normally 'stepped' open had to be 'ramped' open;cavitation had to be either avoided completely or a much simpler model had tobe employed;if actuator models employed hard discontinuities due to end-stop modelingeither great care had to be taken to ensure that there was no contact with end-stops or a difficult form of end-stop modeling had to be employed;sometimes hydraulic volumes had to be increased somewhat to 'de-stiffen' theequations.11 ConclusionsThere are numerical difficulties peculiar to hydraulic systems and these impose a severe test on the solver employed in simulation software. These solver tend to be highly tuned to a specific domain and problems occur when a non-trial foreign system is imported. Tomake multi-domain a routine activity, a new generation of numerical integrators need to be developed capable of coping efficiently with multi-body, hydraulic, pneumatic, electrical and electronic sub-systems.Development of these new range of integrators is a real challenge. If this task is left to the software suppliers, a lot of state of the art numerical analysis may be lost. If it is done by specialist numerical analysts working in universities or research institutes, contact with real industrial problems may be lost. The author believes that the best solution is for specialist numerical analysts to work very close with the simulation software suppliers.12 References[1] Toolsys, Open Toolset For Mixed Simulation of Multi-domain Systems, BRITE-EURAM Project CEC Ref No: BRPR CT96 0303[2] Brenan K.E., S.L. Campbell and L.R. Petzold, Numerical Solution of Initial-value Problems in Differential-Algebraic Equations, North Holland, 1989[3] Beater P., Object-orientated Modeling and Simulation of Hydraulic Drives, Simulation News Europe, No. 22, March 1998[4] Jansson A.J., M. Yahiaoui and C.W. Richards, Running Combined Multi-Body Hydraulic System Simulations within Adams, Proceedings of International Adams User Conference, Ann Arbor, July 1998[5] COMP uter A nalysis of M achines and M echanisms, Centro de Estudios e Investigaciones Técnicas, San Sebastian, Spain.。
Modeling power line icing in freezing precipitation
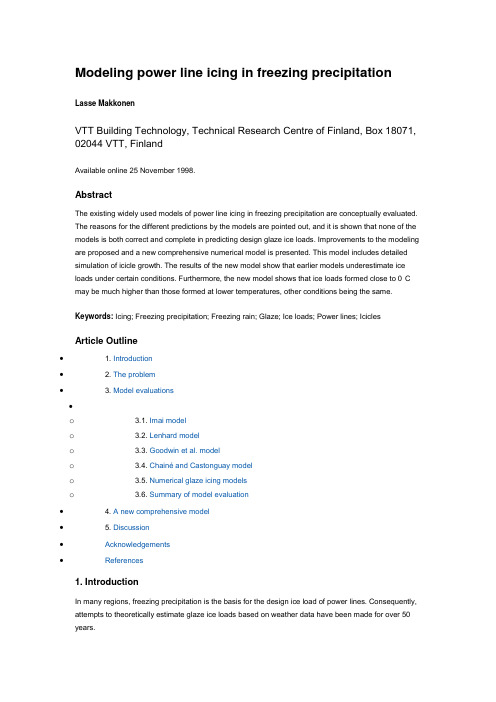
Modeling power line icing in freezing precipitationLasse MakkonenVTT Building Technology, Technical Research Centre of Finland, Box 18071, 02044 VTT, FinlandAvailable online 25 November 1998.AbstractThe existing widely used models of power line icing in freezing precipitation are conceptually evaluated.The reasons for the different predictions by the models are pointed out, and it is shown that none of the models is both correct and complete in predicting design glaze ice loads. Improvements to the modeling are proposed and a new comprehensive numerical model is presented. This model includes detailed simulation of icicle growth. The results of the new model show that earlier models underestimate ice loads under certain conditions. Furthermore, the new model shows that ice loads formed close to 0°C may be much higher than those formed at lower temperatures, other conditions being the same.Keywords: Icing; Freezing precipitation; Freezing rain; Glaze; Ice loads; Power lines; IciclesArticle Outline∙ 1. Introduction∙ 2. The problem∙ 3. Model evaluations∙o 3.1. Imai modelo 3.2. Lenhard modelo 3.3. Goodwin et al. modelo 3.4. Chainé and Castonguay modelo 3.5. Numerical glaze icing modelso 3.6. Summary of model evaluation∙ 4. A new comprehensive model∙ 5. Discussion∙Acknowledgements∙References1. IntroductionIn many regions, freezing precipitation is the basis for the design ice load of power lines. Consequently, attempts to theoretically estimate glaze ice loads based on weather data have been made for over 50 years.This period has, however, not been sufficient to show which of the proposed freezing precipitation models is preferable. Still today, there are various models used operationally and in theoretical studies (Imai, 1953; Lenhard, 1955; Chainé and Castonguay, 1974; Anon, 1984; Goodwin et al., 1983; Lozowski et al., 1983; Makkonen, 1984; Finstad et al., 1988; Szilder, 1994; [Anon, 1977. Ontario Hydro wind and ice loading model. Meteorology Research Report MRI 77 FR-1496, (unpublished)]). Attempts have recently been made to systematically compare the models as `black boxes' against specially collected data for individual icing events (Krishnasamy and Brown, 1986 and Krishnasamy et al., 1993;Felin, 1988; McComber et al., 1993; Yip, 1993). However, the models require different and sometimes missing input parameters, which makes objective comparisons by this method difficult. Also, the data sets seldom include the extreme situations. The models that behave well in limited tests of this kind may not be the ones that predict correctly in the rare extreme conditions that are of interest in structural design. Thus, it is necessary to `open the black boxes' and consider the expected applicability of the various models from a theoretical point of view.In this paper the existing models of power line icing in freezing precipitation are conceptually evaluated. The essential assumptions, the logical concepts, the correctness of mathematical formulas and the completeness of the physics described are considered. A new comprehensive numerical model is then proposed.2. The problemWhen significant liquid precipitation occurs at freezing temperatures glaze ice will form. We consider here the physics of the icing process. A discussion of the meteorological conditions resulting in freezing precipitation can be found elsewhere (e.g., Stallabrass, 1983). It is noteworthy, however, that the structure of the atmospheric boundary-layer is exceptional in these conditions, so that model results may not be readily extrapolated to other heights in the case of tall structures or hilly areas.The process to be modelled is schematically shown in Fig. 1. In order to simulate the process theoretically, one obviously needs to know at least the cable radius R0, the precipitation intensity I, and the wind speed V. More detailed modeling requires the angle θ between the cable orientation and thewind, and the fall speed of the drops V d, so that the drop impact velocity vector can be determined.Using , the flux density F=WV i of impinging water may be calculated if the liquid water content W in the air is known. The latter can be calculated from W=ρW I/V d, where ρW is the water density. The drop fall velocity V d can be determined from empirical expressions relating V d, the drop size distributionand I (e.g., Stallabrass, 1983).Full-size image (9K) Fig. 1.Icing in freezing rain.In freezing rain the drops are so big that the drop collision efficiency may be taken as unity. However, the water collected by the cable may not freeze on the surface, but may be partly lost by shedding. On the other hand, all the run-back water is not typically lost directly. Instead, icicles will grow. The icicles, in turn, offer an additional surface for collecting the wind driven drops, thus increasing the total impinging flux. Simulation of these processes requires the use of air temperature T.The problem description above shows that the most necessary input parameters are rather basic and usually available for weather stations. The precipitation intensity I and duration t of the freezing rain events are the most difficult ones to obtain, but using observers' log-books data can be found. Furthermore, routine weather observations include a code for precipitation type, and these may be used to derive the required input (Haldar et al., 1988; Makkonen and Ahti, 1995) Thus, successful operational modelling of the ice load in the situation of Fig. 1. depends primarily on our ability to describe correctly the physics of the process. The most widely utilized attempts to do this are next critically reviewed.3. Model evaluations3.1. Imai modelImai (1953)proposed that the growth rate of glaze mass per unit length of cable is(1)where C1 is a constant. Integrating Eq. (1)gives(2)where a fixed value (of 0.9 g cm−3) is assumed for the ice density and t is time.Eq. (1)is based on the idea that the icing intensity is controlled by the heat transfer from the cylinder, i.e., the icing mode is wet growth. Therefore, d M/d t is proportional to −T and the precipitation intensity I has no effect.This simple model is, in principle, conceptually correct. However, more recent studies (e.g., [Makkonen, 1984] and [Makkonen, 1985] ) have shown that the heat transfer (controlled by constant C2) is also affected by surface roughness and evaporative cooling, and that wet growth conditions do not always prevail down to −5°C, as assumed by Imai. Because of these deficiencies, the model overestimates ice loads under typical icing conditions, where the water flux F rather than the heat transfer controls icing, and underestimates ice loads in extreme icing conditions because the value of C2 is too small and because icicles are neglected. The underestimation is particularly severe if the air temperature of the design glaze event is close to 0°C.3.2. Lenhard modelLenhard (1955)proposed, based on empirical data, that the ice weight per meter M is(3)where H g is the total amount of precipitation during the icing event and C3 and C4 are constants. It follows from Eq. (3)that(4)In the light of the discussion above (Section 2), this model is very simplistic. It neglects all effects of wind and air temperature, for example. It has also been shown empirically (Lenhard, 1955; McKay and Thompson, 1969; Snitkovskii, 1977) that the correlation between the precipitation amount and ice load is very low.3.3. Goodwin et al. modelThe Goodwin et al. model (Goodwin et al., 1983) assumes that all the drops collected freeze on the cable. In other words, the growth mode is dry. Then, the accretion rate per unit length of the cable is(5)Here, R is the radius of the iced cylinder, W is the liquid water content in air and V i is the drop impact speed. The mass per unit length M at time t, equals πδi (R2−R02), where R is the radius of the iced cylinder, R0 is the radius of the cable and δI is the density of accreted ice. Substituting for M in Eq.(5)gives(6)Integrating Eq. (6)gives the radial ice thickness ΔR=R−R0 accreted in a period t,The drop impact speed is(8)where V d is the fall speed of the drops and V is the wind speed. Here it is assumed that the wind is perpendicular to the cable axis. The liquid water content W can be related to the depth of liquid precipitation H g measured during the accretion time t by(9)where ρw is the water density. Inserting Eq. (8)into Eq. (7)gives(10)which using Eq. (9)equals(11)Eq. (11)is the correct analytical solution for radial ice thickness using the above mentioned assumptions, which include the assumed radial ice shape. Thus, the Goodwin et al. model is conceptually correct.However, in the equation presented originally by Goodwin et al. (1983)the factor ρw in Eq. (11)is missing, perhaps due to implicitly assumed use of the c.g.s. units. It is also missing in Goodwin's equation corresponding to Eq. (9). This may result in incorrect dimensions and numerical errors depending on the units used. This problem appears in some connections (e.g., Anon, 1984; Kolomeychuk and Castonguay, 1987) where the Goodwin et al. model has been referred to.3.4. Chainé and Castonguay modelChainé and Castonguay (1974) also assume that all impinging drops freeze on the cable, but consider an elliptical ice shape. In such a case the cross-sectional area of the ice deposit S i becomes, accordingto Chainé and Castonguay, 1974 Chainé, P.M., Castonguay, G., 1974. New approach to radial ice thickness concept applied to bundle-like conductors, Industrial Meteorology-Study IV, Environment Canada, Toronto, 11 pp..Chainé and Castonguay (1974),(12)where H v is the thickness of the water layer deposited on a vertical surface, i.e., H v=WVt/ρw. Chainé and Castonguay then define a correction factor K as the ratio of the real cross-sectional area and the one calculated from Eq. (12). Then they compare S i with the radial ice section, that is a circular cross-section with the area S i, and show that the equivalent radial ice thickness isThe shape correction factor K is determined empirically by the data in Stallabrass and Hearty (1967)as a function of R0 and air temperature T only. The experiments in Stallabrass and Hearty (1967)were made at much higher velocities and liquid water contents and with smaller drops than those characteristic of freezing rain.Suppose now, as an example, that the real shape is cylindrical. Then Eq. (11)applies. Inserting V t and V, solved from the definitions of H g and H v, into Eq. (11)gives(14)Comparing this solution for a cylindrical deposit with the elliptical concept result in Eq. (13)anddefining results in(15)Solving K from Eq. (15)gives(16)Assuming a typical glaze ice density of 0.9 g/cm3 in Eq. (16)gives(17)or(18)It can be seen from (16) and (18)that, even in the simplest case of a cylindrical real ice accretion, the shape correction factor K in the Chainé and Castonguay (1974) method depends on all the relevant parameters that affect the icing process as well as on ice density. In particular, Eq. (17)showsthat K depends on the effective ice thickness H. In other words, the method solves the ice thickness from an equation which includes a `constant' that depends on the ice thickness itself. Thus, the methodof Chainé and Castonguay (1974) is conceptually incorrect. The severity of the problem in practice can be estimated by changing the ice thickness H in Eq. (17). As an example, for R0=10 mm and H=5 mm the correction factor is K=1.53, and for R=10 mm and H=50 mm it is K=2.65. For larger cable diameters, the change in K with H is smaller. However, in the case of other real ice shapes, K may vary more.3.5. Numerical glaze icing modelsMore recently, various numerical models have been developed to simulate glaze icing on cables. These include the model by Lozowski et al. (1983)the MRI model [Anon, 1977. Ontario Hydro wind and ice loading model. Meteorology Research Report MRI 77 FR-1496, (unpublished)], the MEP model (Anon, 1984) and the models by Makkonen (Makkonen, 1984; Mitten et al., 1988) and Finstad et al. (1988). These models include the various physical processes described in Section 2to a varying extent, and have many similar components.The primary advantage of numerical modeling is that the time-dependent effects can be incorporated and, therefore, also changes in the input parameters can be easily taken into account. Moreover, all of the above mentioned models also simulate rime icing (dry growth) and the models can detect the growth mode by heat balance calculations. Thus, these models make no presumptions about the icing mode.Nevertheless, these numerical models offer little improvement over the analytical solutionof (11) and (14)in estimating design ice loads due to freezing rain. This occurs for the following reasons. First, the designer is interested in the extreme loads and cannot afford to utilize the models' ability to predict smaller ice loads close to 0°C. If he does not have measured weather data for all his sites, h will need to be estimated on the safe side assuming a temperature several degrees below 0°C, in which case these models will predict the highest ice accretion rate. Second, it was shown experimentallyby Makkonen and Stallabrass (1984)and numerically by Finstad et al. (1988)that with no water shedding, the ice accretion rate is quite insensitive to the shape, which some of these models (Lozowski et al., 1983; Finstad et al., 1988) attempt to simulate. Finally, in the case of freezing rain the drop collision efficiency is very close to unity and ice density is invariable, so that there is no need to simulatetime-dependent effects other than the growth of accretion dimensions. This effect is taken into account via time-integration already in (11) and (14).Thus, while the above-mentioned numerical models may be conceptually correct, the simpler Goodwin et al. (1983)model may be used as well in estimating design ice loads due to freezing rain. More so, because complicated numerical models may include numerical problems and software errors. This appears to be the case with the MRI and MEP models, as their predictions differ significantly from those predicted by the Goodwin et al. model as shown by model sensitivity tests (Mitten et al., 1988).Attempts to take into account the formation of icicles have also been made in numerical modeling of cable icing during freezing rain. The Makkonen model (Makkonen, 1984) was improved (Mitten et al., 1988and Makkonen, 1988a) to include icicles. The excess water, otherwise shed from the cable, was assumed to feed the growth of icicles modelled by a separate icicle growth theory (Makkonen, 1988b). However, since the direct water impingement on the icicles themselves was neglected, this model never predicts higher ice loads than in the case of no shedding, i.e., as predicted by Eq. (11). Another model including icicle simulation was presented by Szilder (1994). This is a hybrid analytical and random-walk model that includes empirically based freezing probability and shedding parameters. This model is similar to the above-mentioned version of the Makkonen model in that it does not consider direct water impingement on the icicles. The Szilder model (Szilder, 1994) is not intended for operational use, as no wind effects are included.3.6. Summary of model evaluationThe preceding evaluation of the models for icing due to freezing precipitation may be summarized by noting that the corrected form of the Goodwin model, i.e., Eq. (11)or Eq. (14), is conceptually correct while most other models either are based on deficient physics or are otherwise inapplicable. Out of the tested operational versions, only the Makkonen model (Mitten et al., 1988; Makkonen, 1988a) predicts results essentially the same as the Goodwin model according to the sensitivity tests (Mitten et al., 1988)A summary of the model evaluation is shown in Table 1. An expectation is suggested, based on this conceptual evaluation and the sensitivity tests in Mitten et al. (1988), for the accuracy of the model predictions. This is done separately for typical freezing precipitation conditions and for the extreme cases relevant to structural design. The evaluation by the author is subjective as such, but is an attempt to reflect objectively the conceptual arguments presented in this paper.The rating in Table 1 may first appear to be too critical. However, there is an additional reason, not discussed in detail here so far, for such pessimism. This is that, as long as none of the models properly simulate the growth of icicles and their significant effect in increasing the capture area of the ice deposit, the predictions by even the best of these models may be too low, particularly in extreme icing conditions. This aspect is discussed in detail in the next section.4. A new comprehensive modelThe Makkonen model (Makkonen, 1984Makkonen, 1988a; Mitten et al., 1988) is improved here to take into account direct water impingement on the growing icicles, and to simulate spongy ice growth. This model is the first comprehensive effort to include all relevant physical features, discussed in Section 2, in the modelling of icing in freezing precipitation.The foundation of the new model is the Makkonen (1984)model, which assumes a cylindrical accretion. The impinging water flux in the new model is calculated by the drop impact velocity V i (see Section 2) taking into account the impact angle. The drop fall velocity is solved following Stallabrass (1983). When the growth is wet, the ice is supposed to grow spongy with a liquid fraction of 26% (Makkonen, 1990).When the cylindrical model shows that all the water is not frozen or incorporated into the spongy matrix, then the excess water is assumed to flow onto the bottom of the cable and initiate icicle growth. The water flux from the cylinder into one icicle is obtained by dividing the excess water flux by the number of icicles. A number of 45 icicles per meter is used, based on a theoretical and experimental study of icicle spacing by Makkonen and Fujii (1993).Icicle growth is then modelled simultaneously with the radial growth. Interference between radial growth and icicle growth is addressed in such a way that no radial growth is modelled for the section covered by the root of the icicle and that the icicle length is reduced by radial growth around its root. The subroutine for icicle simulation is the Makkonen icicle model (Makkonen, 1988b) with the improvements explainedin Maeno et al. (1994). Maeno et al. (1994)also includes experimental verification of the icicle model in both calm and windy conditions. As the icicles grow in the model, they start to collect additional water from the precipitation particles which have a horizontal velocity component due to the wind. This adds to the water flux into the icicles and considerably contributes to their growth.The model is designed for operational use. Cable diameter, air temperature relative humidity, wind speed, precipitation rate, angle between wind and line orientation and event duration are needed as input. Consecutive events can be run for long simulations with changing input conditions. The output of the model is the ice load (kg/m) and the equivalent radial ice thickness (mm) on the cable, in the icicles and for the total accretion. Icicle length is also given.Final verification of the new model should be done with data from wind tunnel experiments. However, existing data directly useful for this purpose are scarce. Only four wind tunnel tests made in connection with an icicle spacing study (Makkonen and Fujii, 1993) are directly applicable to this. In these tests the liquid water contents were higher and event durations shorter than those in freezing precipitation. However, the growth conditions were otherwise similar to wet freezing rain icing. Icicles grew in all the tests. The experimental arrangements are given in reference (Makkonen and Fujii, 1993). A version of the new model, which accepts the liquid water content directly as input, was run for the test conditions. The results of the comparison are shown in Table 2. These limited results suggest that the new model predicts well the complicated process of extreme glaze icing with icicles.A fundamentally important feature of the new model presented here is that it simulates the positive feedback between the growth of icicles and the water collected by them. An example of the simulated effect of air temperature on the ice load in an extreme icing event is shown in Fig. 2. Fig. 2 demonstratesthat the biggest load occurs under conditions where the growth mode is wet and icicles grow. In other words, the new model shows that the ice load may, in otherwise fixed conditions, increase with increasing air temperature.Full-size image (6K)Fig. 2.Example of temperature dependence of ice load in freezing precipitation as predicted by the new model. The cable diameter is 15 mm, wind angle 90°, wind speed 12 m/s, precipitation rate 5 mm/h and event duration 6 h. At temperatures below about −1.3°C, all impinging water freezes. At temperatures slightly warmer than this, some water is lost by dripping in the beginning of the icing process, but the icicles do not collect much water directly from the air because they are still small. At temperatures higher than about −1.1°C, icicles grow fast and also collect water directly. At temperatures very close or above 0°C, both radial ice and icicles grow slowly. Some icing occurs above 0°C due to evaporative heat loss, as the relative humidity is assumed as 85% in these simulations.5. DiscussionThe conceptual evaluation presented in this paper indicates that, when the angle between cable orientation and wind is taken into account, the simple Goodwin et al. model or a similar numerical procedure is sufficient to simulate dry growth icing in freezing rain. The Goodwin et al. model gives the same prediction for wet growth and dry growth, because it considers no water shedding. The same applies to the Chainé and Castonguay model. In the light of the new model results presented here, this is only moderately reasonable, as is the approach in the Makkonen model, where most of the otherwise shed water is retained in the form of icicles. All the other useful models, on the other hand, assume that the water not frozen on the cable is completely lost by shedding. It has been shown in this paper that this is not reasonable at all. The excess water from the cable rather increases the total load than decreases it,because of icicle growth. This effect is due to the highly increased surface capture area of the deposit when icicles grow, and it is very important when the wind speed is high.The effect of icicles on the growth of ice loads can be properly taken into account only by numerical modelling that includes all the relevant physical processes and their interactions. A new comprehensive model was presented here and was verified by a limited wind tunnel data set. The new model predicts that in a severe icing environment icicles are an important part of the design load. It also shows that the heaviest ice load may occur at temperatures very close to 0°C and may exceed those predicted by the earlier models.AcknowledgementsI wish to thank Mr. Paul Mitten of Compusult for comments and Mr. Y. Fujii of the Hokkaido Electric Power Company for assistance in the wind tunnel tests.ReferencesAnon, 1984 Anon, 1984. Climatological ice accretion modelling. Meteorological and Environmental Planning and Ontario Hydro, Canadian Climate Centre Report No. 84-10, Atmospheric Environment Service, Downsview, 195 pp..Chainéand Castonguay, 1974 Chainé, P.M., Castonguay, G., 1974. New approach to radial ice thickness concept applied to bundle-like conductors, Industrial Meteorology-Study IV, Environment Canada, Toronto, 11 pp..Felin, 1988 Felin, B., 1988. Freezing rain in Quebec: field observations compared to model estimations. In the Proceedings of the Fourth IWAIS, pp. 119–123..Finstad et al., 1988 Finstad, K., Fikke, S., Ervik, M., 1988. A comprehensive deterministic model for transmission line icing applied to laboratory and field observations. In the Proceedings of the Fourth IWAIS, pp. 227–231..Goodwin et al., 1983 Goodwin, E.J., III, Mozer, J.D., Di Gioia, A.M., Jr., Power, B.A., 1983. Predicting ice and snow loads for transmission lines. In the Proceedings of the First IWAIS, pp. 267–273..Haldar et al., 1988 Haldar, A., Mitten, P., Makkonen, L., 1988. Evaluation of probabilistic climatic loadings on existing 230 kV steel transmission lines. In the Proceedings of the Fourth IWAIS, pp. 19–23..Imai, 1953 I. Imai, Studies on ice accretion. Res. Snow Ice, 1 (1953), pp. 35–44.Kolomeychuk and Castonguay, 1987 Kolomeychuk, R., Castonguay, G., 1987. Climatological ice accretion model implementation, data and testing strategy. Canadian Climate Centre Report No. 87-4, Atmospheric Environment Service, Downsview, 142 pp..Krishnasamy and Brown, 1986 Krishnasamy, S.G., Brown, R.D., 1986. Extreme value analysis of glaze ice accretion. In the Proceedings of the Third IWAIS, pp. 97–101..Krishnasamy et al., 1993 Krishnasamy, S.G., Tabatabai, M., Kastelein, M., 1993. A pilot field project to evaluate icing models in Ontario, Canada. In the Proceedings of the Sixth IWAIS, pp. 85–97..Lenhard, 1955 R.W. Lenhard, An indirect method for estimating the weight of glaze on wires. Bull. Am. Meteor. Soc., 36 (1955), pp. 1–5. | View Record in Scopus | | Cited By in Scopus (9)Lozowski et al., 1983 E.P. Lozowski, J.R. Stallabrass and P.F. Hearty, The icing of an unheated, non-rotating cylinder: Part I: A simulation model. J. Climate Appl. Meteor., 22 (1983), pp. 2053–2062. | View Record in Scopus | | Full Text via CrossRef | Cited By in Scopus (31)Maeno et al., 1994 N. Maeno, L. Makkonen, K. Nishimura, K. Kosugi and T. Takahashi, Growth rates of icicles. J. Glaciol., 40 (1994), pp. 319–326. | View Record in Scopus | | Cited By in Scopus (16)Makkonen, 1984 L. Makkonen, Modeling of ice accretion on wires. J. Climate Appl. Meteor., 23 (1984), pp. 929–939. | View Record in Scopus | | Full Text via CrossRef | Cited By in Scopus (52)Makkonen, 1985 L. Makkonen, Heat transfer and icing of a rough cylinder. Cold Regions Res. Technol., 10 (1985), pp. 105–116. Article | PDF (926 K) | | View Record in Scopus | | Cited By in Scopus (28)Makkonen, 1988a Makkonen, L., 1988a. The growth of icicles. In the Proceedings of the Fourth IWAIS, pp. 236–242..Makkonen, 1988b L. Makkonen, A model of icicle growth. J. Glaciol., 34 (1988), pp. 64–70. | View Record in Scopus | | Cited By in Scopus (22)Makkonen, 1990 Makkonen, L., 1990. The origin of spongy ice. In the Proceedings of the Tenth IAHR Symposium on Ice, V ol. II, pp. 1022–1030..Makkonen and Ahti, 1995 L. Makkonen and K. Ahti, Climatic mapping of ice loads based on airport weather observations. Atmos. Res., 36 (1995), pp. 185–193. Article | PDF (464 K) | | View Record in Scopus | | Cited By in Scopus (9)Makkonen and Fujii, 1993 L. Makkonen and Y. Fujii, Spacing of icicles. Cold Regions Sci. Technol., 21 (1993), pp. 317–322. Article | PDF (475 K) | | View Record in Scopus | | Cited By in Scopus (10)Makkonen and Stallabrass, 1984 Makkonen, L., Stallabrass, J.R., 1984. Ice accretion on cylinder and wires. National Research Council of Canada, DME Report TR-LT-005, 50 pp..。
international journal of simulation modelling 分区
international journal of
simulation modelling 分区
《International Journal of Simulation Modelling》是一本由DAAAM INTERNATIONAL VIENNA出版的学术刊物,主要报道ENGINEERING, INDUSTRIAL-ENGINEERING, MANUFACTURING 相关领域研究成果与实践。
该刊创刊于2002年,出版周期为每年4期。
期刊ISSN号为1726-4529,E-ISSN号为1996-8566。
根据2023年的期刊影响因子和JCR分区,该刊属于Q3级别。
2021-2022年WOS分区等级为Q3,2022年的影响因子为2.9,CiteScore指数为5.10,SJR指数为0.584。
《International Journal of Simulation Modelling》为学术机构、工业界或咨询机构中各种形式的仿真建模研究工作的出版提供了一个全球论坛。
编辑主要寻找原创、高质量、真正富有洞察力、理论和应用导向的模拟建模研究论文,主要是在生产工程或工业工程的离散事件模拟领域。
非对称双轨火箭橇动力学建模与仿真研究
第20卷第11期装备环境工程2023年11月EQUIPMENT ENVIRONMENTAL ENGINEERING·53·非对称双轨火箭橇动力学建模与仿真研究周雪鹏1,代小强1,杨珍2,陈阳1(1.西南技术工程研究所,重庆400039;2.中国兵器工业试验测试研究院,西安 714200)摘要:目的以高速非对称双轨火箭橇系统为研究对象,建立包含橇-轨相互作用的相关动力学模型,开展全轨范围内的动态特性数值模拟研究。
方法在明确火箭橇的组成和动力学过程基础上,对非对称双轨火箭橇进行受力分析,推导和建立非对称火箭橇-轨道耦合动力学模型,并对火箭橇进行自由模态分析。
分析获得火箭橇气动力时程曲线、考虑火箭发动机质量损失的附加质量时程曲线,同时重构了轨道不平顺模型作为轨道激励。
在此基础上,采用动力学软件分析火箭橇系统的动态特性。
结果及结论产品橇模态高于第二级推力橇,第二级推力橇模态高于火箭橇整体模态。
火箭橇加速度随运行速度的增加而增大,竖向加速度大于横向加速度,火箭橇高速运行过程时的危险部位位于侧边翼上,有折断的风险。
火箭橇竖向滑靴之间存在相位差,火箭橇竖向做俯仰运动,横向为往复摆动,竖向动力响应约为横向的1~2倍。
关键词:非对称;火箭橇;橇轨耦合;动力学建模;数值模拟;动态特性中图分类号:TJ013 文献标识码:A 文章编号:1672-9242(2023)11-0053-10DOI:10.7643/ issn.1672-9242.2023.11.008Dynamic Modeling and Numerical Simulation ofAsymmetric Double Orbit Rocket SledZHOU Xue-peng1, DAI Xiao-qiang1, YANG Zhen2, CHEN Yang1(1. Southwest Institute of Technology and Engineering, Chongqing 400039, China; 2. Norinco Group Test andMeasuring Academy, China North Industries Group Corporation Limited, Xi'an 714200, China)ABSTRACT: The work aims to take the high-speed asymmetric double orbit rocket sled system as the research object to estab-lish a relevant dynamic model including the sledge-rail interaction and carry out numerical simulation on the dynamic character-istics within the whole orbit. Firstly, the composition and dynamic process of the rocket sled were clarified, and the force on the asymmetric double orbit rocket sled was analyzed to deduce and establish the coupling dynamic model of rocket sled and orbit.Secondly, the free mode of the rocket sled was analyzed, showing that the product sled mode was higher than the second stage thrust sled, and the second stage thrust sled mode was higher than the overall mode of the rocket sled. Finally, the aerodynamic time history curve of the rocket sled and the additional mass time history curve considering the mass loss of the rocket engine were obtained and theorbit irregularity model was reconstructedas the orbit excitation. On this basis, the dynamics software was used to analyze the dynamic characteristics of the rocket sled system. The acceleration of rocket sled increased with the increase of running speed and the vertical acceleration was greater than the lateral acceleration. The dangerous part of the rocket sled at high speed was on the side wing, where there was a risk of breaking. There was a phase difference between the vertical slippers of the rocket sled. The rocket sled was pitching vertically and swinging back and forth laterally, and the vertical dynamic re-sponse was about 1~2 times that of the lateral one.收稿日期:2023-03-06;修订日期:2023-07-17Received:2023-03-06;Revised:2023-07-17引文格式:周雪鹏, 代小强, 杨珍, 等. 非对称双轨火箭橇动力学建模与仿真研究[J]. 装备环境工程, 2023, 20(11): 053-062.ZHOU Xue-peng, DAI Xiao-qiang, YANG Zhen, et al. Dynamic Modeling and Numerical Simulation ofAsymmetric Double Orbit Rocket Sled[J]. Equipment Environmental Engineering, 2023, 20(11): 053-062.·54·装备环境工程 2023年11月KEY WORDS: asymmetric; rocket sled; sled-orbit coupling; dynamic modeling; numerical simulation; dynamic characteristics火箭橇试验技术能够将飞行状态进行精确模拟,已广泛应用于飞机、导弹、空中飞行器等,可以解决武器装备在研制过程中有关高速度、高加速度可能带来的许多技术问题。
Advanced Mathematical Modeling Techniques
Advanced Mathematical ModelingTechniquesIn the realm of scientific inquiry and problem-solving, the application of advanced mathematical modeling techniques stands as a beacon of innovation and precision. From predicting the behavior of complex systems to optimizing processes in various fields, these techniques serve as invaluable tools for researchers, engineers, and decision-makers alike. In this discourse, we delve into the intricacies of advanced mathematical modeling techniques, exploring their principles, applications, and significance in modern society.At the core of advanced mathematical modeling lies the fusion of mathematical theory with computational algorithms, enabling the representation and analysis of intricate real-world phenomena. One of the fundamental techniques embraced in this domain is differential equations, serving as the mathematical language for describing change and dynamical systems. Whether in physics, engineering, biology, or economics, differential equations offer a powerful framework for understanding the evolution of variables over time. From classical ordinary differential equations (ODEs) to their more complex counterparts, such as partial differential equations (PDEs), researchers leverage these tools to unravel the dynamics of phenomena ranging from population growth to fluid flow.Beyond differential equations, advanced mathematical modeling encompasses a plethora of techniques tailored to specific applications. Among these, optimization theory emerges as a cornerstone, providing methodologies to identify optimal solutions amidst a multitude of possible choices. Whether in logistics, finance, or engineering design, optimization techniques enable the efficient allocation of resources, the maximization of profits, or the minimization of costs. From linear programming to nonlinear optimization and evolutionary algorithms, these methods empower decision-makers to navigate complex decision landscapes and achieve desired outcomes.Furthermore, stochastic processes constitute another vital aspect of advanced mathematical modeling, accounting for randomness and uncertainty in real-world systems. From Markov chains to stochastic differential equations, these techniques capture the probabilistic nature of phenomena, offering insights into risk assessment, financial modeling, and dynamic systems subjected to random fluctuations. By integrating probabilistic elements into mathematical models, researchers gain a deeper understanding of uncertainty's impact on outcomes, facilitating informed decision-making and risk management strategies.The advent of computational power has revolutionized the landscape of advanced mathematical modeling, enabling the simulation and analysis of increasingly complex systems. Numerical methods play a pivotal role in this paradigm, providing algorithms for approximating solutions to mathematical problems that defy analytical treatment. Finite element methods, finite difference methods, and Monte Carlo simulations are but a few examples of numerical techniques employed to tackle problems spanning from structural analysis to option pricing. Through iterative computation and algorithmic refinement, these methods empower researchers to explore phenomena with unprecedented depth and accuracy.Moreover, the interdisciplinary nature of advanced mathematical modeling fosters synergies across diverse fields, catalyzing innovation and breakthroughs. Machine learning and data-driven modeling, for instance, have emerged as formidable allies in deciphering complex patterns and extracting insights from vast datasets. Whether in predictive modeling, pattern recognition, or decision support systems, machine learning algorithms leverage statistical techniques to uncover hidden structures and relationships, driving advancements in fields as diverse as healthcare, finance, and autonomous systems.The application domains of advanced mathematical modeling techniques are as diverse as they are far-reaching. In the realm of healthcare, mathematical models underpin epidemiological studies, aiding in the understanding and mitigation of infectious diseases. From compartmental models like the SIR model to agent-based simulations, these tools inform public health policies and intervention strategies, guiding efforts to combat pandemics and safeguard populations.In the domain of climate science, mathematical models serve as indispensable tools for understanding Earth's complex climate system and projecting future trends. Coupling atmospheric, oceanic, and cryospheric models, researchers simulate the dynamics of climate variables, offering insights into phenomena such as global warming, sea-level rise, and extreme weather events. By integrating observational data and physical principles, these models enhance our understanding of climate dynamics, informing mitigation and adaptation strategies to address the challenges of climate change.Furthermore, in the realm of finance, mathematical modeling techniques underpin the pricing of financial instruments, the management of investment portfolios, and the assessment of risk. From option pricing models rooted in stochastic calculus to portfolio optimization techniques grounded in optimization theory, these tools empower financial institutions to make informed decisions in a volatile and uncertain market environment. By quantifying risk and return profiles, mathematical models facilitate the allocation of capital, the hedging of riskexposures, and the management of investment strategies, thereby contributing to financial stability and resilience.In conclusion, advanced mathematical modeling techniques represent a cornerstone of modern science and engineering, providing powerful tools for understanding, predicting, and optimizing complex systems. From differential equations to optimization theory, from stochastic processes to machine learning, these techniques enable researchers and practitioners to tackle a myriad of challenges across diverse domains. As computational capabilities continue to advance and interdisciplinary collaborations flourish, the potential for innovation and discovery in the realm of mathematical modeling knows no bounds. By harnessing the power of mathematics, computation, and data, we embark on a journey of exploration and insight, unraveling the mysteries of the universe and shaping the world of tomorrow.。
On the Modeling and Simulation of Friction

Abstract
Two new modeLs for "slp-stick ion are presented. One, called the "bristle model," is an apprxiation designed to apture the psical phenomenon of sticking. This model is relatively inefficent numericaly. The other model,called the "resetintegratormodel," does not Capture the details of the sticing phenomenon, but is numerically efficient and exhibits behavior similar to the model propoed by Karnopp in 1985. All threeof these modelsare preferable to thecassical model which poorly represents the friction force at zero velcdty. Simulation experiments show that the new models and the Karnopp model give simflar results in two examples In a dosed-loop example, the classical model predkts a mimit cycle which is not observed in the laboratory. The new modeis and the Karnopp model, on the other hand, agree with the experimental obserntio.
Computational Fluid Dynamics

Computational Fluid Dynamics Computational Fluid Dynamics (CFD) is a branch of fluid mechanics thatutilizes numerical analysis and algorithms to solve and analyze problems that involve fluid flows. It has become an essential tool in various industries, including aerospace, automotive, environmental engineering, and many more. CFD allows engineers and scientists to simulate the behavior of fluids in complex systems, providing valuable insights and predictions that are crucial for design and optimization processes. One of the key challenges in CFD is the accurate modeling of turbulent flows. Turbulence is a complex and chaotic phenomenon that occurs in many practical fluid flow situations. It is characterized by irregular fluctuations in velocity and pressure, making it difficult to predict and analyze using traditional fluid dynamics equations. CFD techniques have been developed to address these challenges, such as large eddy simulation (LES) and detached eddy simulation (DES), which aim to capture the large-scale structures of turbulence while modeling the smaller scales. In addition to turbulence modeling, another significant issue in CFD is the validation and verification of simulation results. Real-world experimental data is often limited, especially in extreme or hazardous environments, making it challenging to validate the accuracy of CFD simulations. Engineers and researchers must carefully validate their CFD models against available experimental data and continuously improve their simulation methodologies to ensure reliability and confidence in the results. Furthermore, the computational cost of CFD simulations can be a significant barrier, especially for complex and large-scale problems. High-fidelity simulations with fine spatial and temporal resolutions can require substantial computational resources and time, limiting the practicality of CFD for some applications. Researchers arecontinually developing and optimizing numerical algorithms and computational techniques to improve the efficiency and scalability of CFD simulations, enabling faster and more cost-effective analyses. From an industry perspective, CFD plays a crucial role in the design and optimization of various engineering systems. In the aerospace industry, CFD is used to analyze airflows over aircraft wings, optimize aerodynamic performance, and reduce drag. In the automotive sector, CFD helps engineers design more efficient and aerodynamic vehicles, leading toimproved fuel efficiency and reduced emissions. Moreover, in the renewable energy sector, CFD is utilized to optimize the design of wind turbines and tidal energy systems, maximizing energy extraction and minimizing environmental impact. Despite its challenges, CFD continues to advance and evolve, driven by the increasing demand for accurate and reliable fluid flow simulations. The ongoing development of high-performance computing, coupled with advancements in numerical methods and turbulence modeling, is pushing the boundaries of what is achievable with CFD. As a result, CFD is poised to play an even more significant role in shaping the future of engineering and technology, offering unprecedented insights into fluid dynamics and empowering engineers to tackle complex design and optimization challenges.。
System Modeling and Simulation
System Modeling and Simulation System modeling and simulation play a crucial role in various industries, including engineering, healthcare, finance, and many more. The process of system modeling involves creating a simplified representation of a real system, while simulation allows for the analysis of the system's behavior under different conditions. This powerful combination enables professionals to make informed decisions, optimize processes, and predict outcomes with a high degree of accuracy. From an engineering perspective, system modeling and simulation are essential for designing and testing complex systems such as aircraft, automobiles, andindustrial machinery. By creating virtual models of these systems, engineers can analyze their performance, identify potential issues, and make necessary adjustments before physical prototypes are built. This not only saves time and resources but also enhances the overall safety and reliability of the final products. In the healthcare industry, system modeling and simulation are used to improve patient care, optimize hospital operations, and advance medical research. For instance, simulation models can help healthcare providers better understand patient flow, resource allocation, and the impact of different treatment protocols. This can lead to more efficient healthcare delivery, reduced wait times, and ultimately, better patient outcomes. In the realm of finance, system modeling and simulation are employed to analyze market trends, assess risks, and develop investment strategies. Financial institutions rely on these tools to simulate various economic scenarios, stress test their portfolios, and make well-informed decisions in a rapidly changing market environment. Additionally, system modeling and simulation are integral to the development of predictive models for pricing derivatives, managing assets, and mitigating financial risks. Beyond thesespecific industries, system modeling and simulation have broader implications for society as a whole. For example, in the context of urban planning, these tools can be used to simulate traffic patterns, analyze the impact of infrastructureprojects, and optimize public transportation systems. This can lead to more sustainable and livable cities, with reduced congestion and improved accessibility for residents. Despite the numerous benefits of system modeling and simulation, there are challenges that need to be addressed. One such challenge is thecomplexity of creating accurate models that capture all relevant aspects of a system. This requires a deep understanding of the system's behavior, as well as the availability of reliable data for validation and calibration. Additionally, the computational resources required for running simulations of large-scale systems can be substantial, necessitating efficient algorithms and high-performance computing infrastructure. Furthermore, the interpretation of simulation results and the translation of findings into actionable insights can be a daunting task. It requires interdisciplinary collaboration between domain experts, data scientists, and simulation specialists to ensure that the outcomes are meaningful and applicable in real-world scenarios. Moreover, there is a need for continuous refinement and validation of simulation models to keep them relevant and accurate in dynamic environments. From a human perspective, the use of system modeling and simulation can evoke a sense of empowerment and confidence in decision-making. Professionals who leverage these tools are better equipped to anticipate challenges, explore innovative solutions, and make evidence-based choices. This can lead to a greater sense of control over complex systems and a reduced fear of the unknown, ultimately fostering a culture of continuous improvement and resilience. In conclusion, system modeling and simulation are indispensable tools that have far-reaching implications across various industries and societal domains. While they offer tremendous potential for innovation and progress, it is essential to acknowledge the challenges associated with their application and to work towards overcoming them through collaboration, innovation, and a commitment to excellence. As technology continues to advance, the future of system modeling and simulation holds great promise for shaping a more efficient, sustainable, and prosperous world.。
simulation parameters and results
simulation parameters and resultsSimulation parameters and results are two important aspects of computational modeling and simulation studies. Simulation parameters refer to the values and settings used in a simulation model, while simulation results represent the output of the model based on these parameters.Simulation parameters can include various inputs such as initial conditions, boundary conditions, and numerical techniques used to solve the underlying equations. These parameters determine the behavior of the model and influence the accuracy and reliability of the simulation results.Some common simulation parameters include:1. Time step: The amount of time between successive calculations in the simulation.2. Time horizon: The total time span of the simulation.3. Initial conditions: The starting point of the simulation, usually represented by the values of the variables at the beginning of the time horizon.4. Boundary conditions: The values of the variables at the boundaries of the domain of interest.5. Numerical method: The technique used to solve the underlying equations, such as finite difference methods, finite element methods, or numerical integration methods.Simulation results represent the output of the model based on the chosen parameters. These results can take various forms, such as graphs, tables, or visualizations, and are used to analyze the behavior of the model and validate its accuracy.Some common simulation results include:1. Time series plots: Graphs showing the evolution of variables over time.2. Phase space plots: Graphs showing the evolution of multiple variables in a two or three-dimensional space.3. State space diagrams: Graphs showing the evolution of a system's states and inputs over time.4. Statistical quantities: Quantities such as mean, median, and standard deviation of the simulated variables.By analyzing simulation results, researchers can gain insights into the behavior of the model and identify patterns, trends, or underlying mechanisms. This can help inform decision-making processes, design improvements, or validate the effectiveness of a particular strategy or policy.In conclusion, simulation parameters and results are crucial components of computational modeling and simulation studies. They allow researchers to explore complex systems, analyze their behavior, and make data-driven decisions. Careful selection and analysis of simulation parameters and results can lead to valuable insights and improved understanding of the underlying processes.。
全球半导体晶体生长仿真
Stream
function
psi 7.4E-05 7.1E-05 6.8E-05 6.5E-05 6.2E-05 5.8E-05 5.5E-05 5.2E-05 4.9E-05 4.6E-05 4.3E-05 4.0E-05 3.6E-05 3.3E-05 3.0E-05 2.7E-05 2.4E-05 2.1E-05 1.7E-05 1.4E-05 1.1E-05 8.0E-06 4.8E-06 1.7E-06 -1.5E-06 -4.7E-06
1. Numerical strategy (cont’d)
Heat shield
Typical FEMAG-CZ global unstructured
mesh
- crystal quality ? - process yield ? - energy consumption ? - production rate ?
FEMAGSoft © 2013
Introduction (cont’d)
Main difficulties:
– Multi-physics: heat and mass transport in the melt and the gas, turbulence, radiation transfer, etc., all interact and strongly affect species incorporation and defect formation in the crystal
• b) Time-dependent modeling: use of various simulation modes (ex: quasi-steady, quasi-dynamic, inverse or direct dynamic models in Cz growth)
毕业论文-电机圆筒外壳模具设计

摘要随着计算机技术和数值计算技术的发展完善,计算机在铸造领域得到了广泛的研究和应用。
它可以在不进行实际浇注的情况下,模拟铸造的充型、凝固、传热、应力场、微观组织分布、缩孔及缩松的形成等过程,可以大大提高生产效率和经济效益,对于铸造生产具有十分重要的意义。
本论文中,首先用高级绘图软件UG实现电机圆筒外壳的三维实体造型,并导出*.stl格式的文件;然后利用数值模拟软件AnyCasting,对其进行一系列的参数设置,选择优化的网格剖分数量,完成对铸件的前处理后,开始模拟电机外壳铸造的整个过程。
最后输出结果并对其分析。
本文着重分析了充型、凝固过程,及其速度场、温度场的变化情况。
主要结论如下:(1)利用高级绘图软件对三维实体造型的设计,这是数值模拟的前期准备阶段。
绘制的准确与否,直接影响到后期的模拟结果。
(2)Anycasting软件对铸件的充型、凝固过程数值模拟能比较准确地反映铸件的实际状况,预测可能产生的铸造缺陷及产生缺陷的部位。
(3)对电机圆筒外壳铸件解剖和宏观观察,结果显示边缘处尚存在一定程度的缩孔,缩松缺陷,但缺陷较少,说明这个设计工艺较为合理。
关键词:三维实体造型,数值模拟,充型IAbstractWith the development of the computing technology and the numerical calculating technology, the compute was applied to the casting field more and more. The numerical simulation technology can simulate the forming process of mold filling, the solidification, the conduct heat, the stress field, the distribution of micro-organization and the shrinkage cavity and so on in the casting without experiencing practical molding, and improve greatly the yield efficiency and economic benefits. Therefore, the compute technology has become important meanings in casting production.In this thesis, firstly, the three-dimensional solid modeling of motor shell should be achieved by the advanced graphics software UG and then export it the *.stl file format. Secondly, carry out a series of parameter settings and select the optimal number of mesh using software "Anycasting". Thirdly, after completion of the pre-casting, this paper starts to investigate the whole simulative process of casting. Besides the numerical simulation of the filling and solidification process, the paper investigates the changing of the velocity field and temperature field. The main research work and conclusions are presented as follows.1. The three-dimensional solid modeling of motor shell should be achieved by the advanced graphics software UG which is the pre-preparation phase of the numerical simulation. The accuracy of the molding directly impact on the results of simulation.2. The numerical simulation of the filling and solidification process can reflect the actual condition of the casting, and can predict the possible foundry defect and its position in the cast product.3. The three-dimensional solid modeling of motor shell was sectioned and observed macroscopically. The results showed that the position of shrinkage porosity defects was close to the edge of the casting. But It was found that that the trend of shrinkage porosity defects increased slightly which shows that This process is reasonableKey words: three-dimensional solid modeling, numerical simulation, the fillingII目录摘要 (I)Abstract (II)目录 (III)第一章引言 (1)1.1Unigraphics 介绍 (1)1.2两种铸造模拟软件介绍 (2)1.2.1 Anycasting软件 (2)1.2.2 ProCAST软件 (3)1.3铸件充型凝固数值模拟的研究进展 (6)1.4本文研究内容 (7)第二章电机圆筒外壳三维实体造型 (8)2.1电机外壳铸造工艺设计 (8)2.1.1工艺方案的分析 (8)2.1.2浇口设计 (8)2.1.3冒口设计 (9)2.2电机圆筒外壳造型特点及三维实体造型方法 (9)2.3电机圆筒外壳的绘制 (9)2.4 STL文件的导出 (15)第三章电机圆筒外壳铸造工艺数值模拟 (16)3.1电机外壳的实体造型 (16)3.2数值模拟前处理 (16)3.2.1仿真铸件的有限差分网格划分 (16)3.2.2设定铸造工艺参数 (18)3.3运行求解 (20)第四章铸件充型过程数值模拟结果及分析 (22)4.1充型过程 (22)4.2铸件凝固过程 (26)4.3传感器输出曲线及分析 (31)III第五章结论 (40)参考文献 (41)致谢 (43)IV第一章引言1.1Unigraphics 介绍Unigraphics(简称UG)最早应用于美国麦道飞机公司,1997年10月将微机版的Solid Edge软件统一到Parasolid平台上,形成了较为完善的企业级集成系统。
MS程序简介-材料设计与计算机模拟
应用实例 4
Study of the Effect of Alloying on the Surface Reactivity of Catalysts The CASTEP simulations resulted in the following : CO 优先吸附在Pt表面的顶位 Oxygen 优先吸附在Cu3Pt(111) 表面Cu原子间的空心位 CO (or Oa) 在合金表面的吸附能比两种纯金属表面的吸附能低。 合金表面上CO 氧化的势垒比在纯金属表面低. 表明Cu3Pt 可能是比
the charge density Physical Review Letters, 91, (2003) 105502
应用实例 3
Understanding the Properties (structural, mechanical, vibrational, and electronic) of Carbon and Boron-nitride Nanotubes
Materials Studio的主要模块
CASTEP典型的应用包括表面化学、键结构、态密度和光学性质等研 究,CASTEP也可用于研究体系的电荷密度和波函数的3D形式。此外, CASTEP可用于有效研究点缺陷(空位,间隙和置换杂质)和扩展缺陷(如 晶界和位错)的性质。
研究表面分子吸附的单包(左) 研究点缺陷的单包(右)
材料设计与计算机模拟
Material designing & Computer simulation
Materials Studio 模块简介
Introduction of Materials Studio’s Moduls
Ansoft Maxwell介绍与应用

03
Introduction to Ansoft Maxwell Software Features
Geometric modeling and mesh partitioning
要点一
Geometric modeling
要点二
Mesh partitioning
Ansoft Maxwell provides a powerful geometric modeling tool that allows users to create complex 3D models It supports various modeling operations such as extrusion, rotation, and Boolean operations
Getting started with Ansoft Maxwell
This section provides a step by step guide on how to get started with using Ansoft Maxwell, including installation, interface overview, and basic operations
Electrical Wave Promotion
Understand the promotion of electrical waves in different media and the associated concepts of reflection, reflection, and diffusion
Boundary Coior of electromagnetic fields at the interface between different media, essential for accurate field calculations
simulation modelling practice and theory sci
simulation modelling practice and theory sci全文共四篇示例,供读者参考第一篇示例:仿真建模实践与理论科学是一门旨在研究仿真技术在不同领域中的应用和发展的学科。
它涵盖了模型建立、仿真实验、数据分析等方面的内容,是一门跨学科的综合性学科。
仿真建模实践与理论科学的发展源远流长,它的发展史可以追溯到数学、物理学等领域的建模实践。
在当今信息化、数字化的时代,仿真建模已经成为了许多领域的重要工具,为我们认识和解决现实世界中的问题提供了新的途径。
在仿真建模实践与理论科学领域中,科学家们通过数学和计算机技术建立模型,通过对模型的仿真实验来观察和分析系统行为,并从中获取有关系统的信息。
这些信息可以帮助我们更好地理解系统的运行机理,指导我们做出相应的决策,提高系统的效率和性能。
在不同领域中,仿真建模都发挥着重要的作用,比如在工程领域中,仿真建模可以帮助工程师们设计和优化产品,提高产品的质量和性能;在医学领域中,仿真建模可以帮助医生们理解疾病的发生和发展机理,指导他们制定治疗方案等。
除了在实践中发挥着重要作用外,仿真建模实践与理论科学也在理论上不断地得到拓展和深化。
科学家们运用数学模型和计算机技术,探索系统的动力学行为、性质、规律等方面的规律,推动了系统科学和计算科学的发展。
仿真建模的理论也逐渐由简单的数学模型扩展到了包括多尺度、多模态、多组分等多种因素的复杂系统建模,使仿真建模更加贴近实际问题,更具有针对性和预见性。
在仿真建模实践与理论科学的研究中,还存在着一些困难和挑战。
复杂系统的建模和仿真需要大量的计算资源和数据支持,这对仿真建模的算法和技术提出了更高的要求;仿真建模需要在实际系统的基础上建立模型,并进行验证和验证,这对科学家们的理论功底和经验积累提出了更高的要求;不同领域之间的交叉和融合也需要科学家们具备跨学科的知识和思维能力,这为仿真建模的发展带来了更多的机遇和挑战。
Introduction_to_Modeling_and_Simulation[1]
![Introduction_to_Modeling_and_Simulation[1]](https://img.taocdn.com/s3/m/25c398d8b14e852458fb571b.png)
INTRODUCTION TO MODELING AND SIMULATIONAnu MariaState University of New York at Binghamton Department of Systems Science and Industrial Engineering Binghamton, NY 13902-6000, U.S.A.ABSTRACTThis introductory tutorial is an overview of simulation modeling and analysis. Many critical questions are answered in the paper. What is modeling? What is simulation? What is simulation modeling and analysis? What types of problems are suitable for simulation? How to select simulation software? What are the benefits and pitfalls in modeling and simulation? The intended audience is those unfamiliar with the area of discrete event simulation as well as beginners looking for an overview of the area. This includes anyone who is involved in system design and modification - system analysts, management personnel, engineers, military planners, economists, banking analysts, and computer scientists. Familiarity with probability and statistics is assumed.1WHAT IS MODELING?Modeling is the process of producing a model; a model is a representation of the construction and working of some system of interest. A model is similar to but simpler than the system it represents. One purpose of a model is to enable the analyst to predict the effect of changes to the system. On the one hand, a model should be a close approximation to the real system and incorporate most of its salient features. On the other hand, it should not be so complex that it is impossible to understand and experiment with it. A good model is a judicious tradeoff between realism and simplicity. Simulation practitioners recommend increasing the complexity of a model iteratively. An important issue in modeling is model validity. Model validation techniques include simulating the model under known input conditions and comparing model output with system output.Generally, a model intended for a simulation study is a mathematical model developed with the help of simulation software. Mathematical model classifications include deterministic (input and output variables are fixed values) or stochastic (at least one of the input or output variables is probabilistic); static (time is not taken into account) or dynamic (time-varying interactions among variables are taken into account). Typically, simulation models are stochastic and dynamic.2WHAT IS SIMULATION?A simulation of a system is the operation of a model of the system. The model can be reconfigured and experimented with; usually, this is impossible, too expensive or impractical to do in the system it represents. The operation of the model can be studied, and hence, properties concerning the behavior of the actual system or its subsystem can be inferred. In its broadest sense, simulation is a tool to evaluate the performance of a system, existing or proposed, under different configurations of interest and over long periods of real time.Simulation is used before an existing system is altered or a new system built, to reduce the chances of failure to meet specifications, to eliminate unforeseen bottlenecks, to prevent under or over-utilization of resources, and to optimize system performance. For instance, simulation can be used to answer questions like: What is the best design for a new telecommunications network? What are the associated resource requirements? How will a telecommunication network perform when the traffic load increases by 50%? How will a new routing algorithm affect its performance? Which network protocol optimizes network performance? What will be the impact of a link failure?The subject of this tutorial is discrete event simulation in which the central assumption is that the system changes instantaneously in response to certain discrete events. For instance, in an M/M/1 queue - a single server queuing process in which time between arrivals and service time are exponential - an arrival causes the system to change instantaneously. On the other hand, continuous simulators, like flight simulators and weather simulators, attempt to quantify the changes in a system continuously over time in response toProceedings of the 1997 Winter Simulation Conferenceed. S. Andradóttir, K. J. Healy, D. H. Withers, and B. L. Nelson7controls. Discrete event simulation is less detailed (coarser in its smallest time unit) than continuous simulation but it is much simpler to implement, and hence, is used in a wide variety of situations.Figure 1 is a schematic of a simulation study. The iterative nature of the process is indicated by the system under study becoming the altered system which then becomes the system under study and the cycle repeats. In a simulation study, human decision making is required at all stages, namely, model development, experiment design, output analysis, conclusion formulation, and making decisions to alter the system under study. The only stage where human intervention is not required is the running of the simulations, which most simulation software packages perform efficiently. The important point is that powerful simulation software is merely a hygiene factor - its absence can hurt a simulation study but its presence will not ensure success. Experienced problem formulators and simulation modelers and analysts are indispensable for a successful simulation study.Figure 1: Simulation Study Schematic The steps involved in developing a simulation model, designing a simulation experiment, and performing simulation analysis are:Step 1.Identify the problem.Step 2.Formulate the problem.Step 3.Collect and process real system data.Step 4.Formulate and develop a model.Step 5.Validate the model.Step 6.Document model for future use.Step 7.Select appropriate experimental design.Step 8.Establish experimental conditions for runs.Step 9.Perform simulation runs.Step 10.Interpret and present results.Step 11.Recommend further course of action. Although this is a logical ordering of steps in a simulation study, many iterations at various sub-stages may be required before the objectives of a simulation study are achieved. Not all the steps may be possible and/or required. On the other hand, additional steps may have to be performed. The next three sections describe these steps in detail.3HOW TO DEVELOP A SIMULATION MODEL?Simulation models consist of the following components: system entities, input variables, performance measures, and functional relationships. For instance in a simulation model of an M/M/1 queue, the server and the queue are system entities, arrival rate and service rate are input variables, mean wait time and maximum queue length are performance measures, and 'time in system = wait time + service time' is an example of a functional relationship. Almost all simulation software packages provide constructs to model each of the above components. Modeling is arguably the most important part of a simulation study. Indeed, a simulation study is as good as the simulation model. Simulation modeling comprises the following steps:Step 1.Identify the problem. Enumerate problems with an existing system. Produce requirements for a proposed system.Step 2.Formulate the problem. Select the bounds of the system, the problem or a part thereof, to be studied. Define overall objective of the study and a few specific issues to be addressed. Define performance measures - quantitative criteria on the basis of which different system configurations will be compared and ranked. Identify, briefly at this stage, the configurations of interest and formulate hypotheses about system performance. Decide the time frame of the study, i.e., will the model be used for a one-time decision (e.g., capital expenditure) or over a period of time on a regular basis (e.g., air traffic scheduling). Identify the end user of the simulation model, e.g., corporate management versus a production supervisor. Problems must be formulated as precisely as possible.Step 3.Collect and process real system data. Collect data on system specifications (e.g., bandwidth for a communication network), input variables, as well as8Mariaperformance of the existing system. Identify sources of randomness in the system, i.e., the stochastic input variables. Select an appropriate input probability distribution for each stochastic input variable and estimate corresponding parameter(s).Software packages for distribution fitting and selection include ExpertFit, BestFit, and add-ons in some standard statistical packages. These aids combine goodness-of-fit tests, e.g., χ2 test, Kolmogorov-Smirnov test, and Anderson-Darling test, and parameter estimation in a user friendly format.Standard distributions, e.g., exponential, Poisson, normal, hyperexponential, etc., are easy to model and simulate. Although most simulation software packages include many distributions as a standard feature, issues relating to random number generators and generating random variates from various distributions are pertinent and should be looked into. Empirical distributions are used when standard distributions are not appropriate or do not fit the available system data. Triangular, uniform or normal distribution is used as a first guess when no data are available. For a detailed treatment of probability distributions see Maria and Zhang (1997).Step 4.Formulate and develop a model. Develop schematics and network diagrams of the system (How do entities flow through the system?). Translate these conceptual models to simulation software acceptable form. Verify that the simulation model executes as intended. Verification techniques include traces, varying input parameters over their acceptable range and checking the output, substituting constants for random variables and manually checking results, and animation.Step 5.Validate the model. Compare the model's performance under known conditions with the performance of the real system. Perform statistical inference tests and get the model examined by system experts. Assess the confidence that the end user places on the model and address problems if any. For major simulation studies, experienced consultants advocate a structured presentation of the model by the simulation analyst(s) before an audience of management and system experts. This not only ensures that the model assumptions are correct, complete and consistent, but also enhances confidence in the model.Step 6.Document model for future use. Document objectives, assumptions and input variables in detail.4 HOW TO DESIGN A SIMULATION EXPERIMENT?A simulation experiment is a test or a series of tests in which meaningful changes are made to the input variables of a simulation model so that we may observe and identify the reasons for changes in the performance measures. The number of experiments in a simulation study is greater than or equal to the number of questions being asked about the model (e.g., Is there a significant difference between the mean delay in communication networks A and B?, Which network has the least delay: A, B, or C? How will a new routing algorithm affect the performance of network B?). Design of a simulation experiment involves answering the question: what data need to be obtained, in what form, and how much? The following steps illustrate the process of designing a simulation experiment.Step 7.Select appropriate experimental design. Select a performance measure, a few input variables that are likely to influence it, and the levels of each input variable. When the number of possible configurations (product of the number of input variables and the levels of each input variable) is large and the simulation model is complex, common second-order design classes including central composite, Box-Behnken, and full-factorial should be considered. Document the experimental design.Step 8.Establish experimental conditions for runs. Address the question of obtaining accurate information and the most information from each run. Determine if the system is stationary (performance measure does not change over time) or non-stationary (performance measure changes over time). Generally, in stationary systems, steady-state behavior of the response variable is of interest. Ascertain whether a terminating or a non-terminating simulation run is appropriate. Select the run length. Select appropriate starting conditions (e.g., empty and idle, five customers in queue at time 0). Select the length of the warm-up period, if required. Decide the number of independent runs - each run uses a different random number stream and the same starting conditions -by considering output data sample size. Sample size must be large enough (at least 3-5 runs for each configuration) to provide the required confidence in the performance measure estimates. Alternately, use common random numbers to compare alternative configurations by using a separate random number stream for each sampling process in a configuration. Identify output data most likely to be correlated.Step 9.Perform simulation runs. Perform runs according to steps 7-8 above.5 HOW TO PERFORM SIMULATION ANALYSIS?Introduction to Modeling and Simulation 9Most simulation packages provide run statistics (mean,standard deviation, minimum value, maximum value) on the performance measures, e.g., wait time (non-time persistent statistic), inventory on hand (time persistent statistic). Let the mean wait time in an M/M/1 queue observed from n runs be n 21W ...,,W ,W . It is important to understand that the mean wait time W is a random variable and the objective of output analysis is to estimate the true mean of W and to quantify its variability.Notwithstanding the facts that there are no data collection errors in simulation, the underlying model is fully known, and replications and configurations are user controlled, simulation results are difficult to interpret. An observation may be due to system characteristics or just a random occurrence. Normally, statistical inference can assess the significance of an observed phenomenon, but most statistical inference techniques assume independent, identically distributed (iid) data. Most types of simulation data are autocorrelated, and hence, do not satisfy this assumption. Analysis of simulation output data consists of the following steps.Step 10.Interpret and present results. Compute numerical estimates (e.g., mean, confidence intervals) of the desired performance measure for each configuration of interest. To obtain confidence intervals for the mean of autocorrelated data, the technique of batch means can be used. In batch means, original contiguous data set from a run is replaced with a smaller data set containing the means of contiguous batches of original observations.The assumption that batch means are independent may not always be true; increasing total sample size and increasing the batch length may help.Test hypotheses about system performance.Construct graphical displays (e.g., pie charts, histograms)of the output data. Document results and conclusions.Step 11.Recommend further course of action. This may include further experiments to increase the precision and reduce the bias of estimators, to perform sensitivity analyses, etc.6AN EXAMPLEA machine shop contains two drills, one straightener, and one finishing operator. Figure 2 shows a schematic of the machine shop. Two types of parts enter the machine shop.in sequence. Type 2 parts require only drilling and finishing. The frequency of arrival and the time to be routed to the drilling area are deterministic for both types of parts.Step 1.Identify the problem. The utilization of drills, straightener, and finishing operator needs to be assessed. In addition, the following modification to the original system is of interest: the frequency of arrival of both parts is exponential with the same respective means as in the original system.Step 2.Formulate the problem. The objective is to obtain the utilization of drills, straightener, and finishing operator for the original system and the modification . The assumptions include:♦The two drills are identical♦There is no material handling time between the threeoperations.♦Machine availability implies operator availability.♦Parts are processed on a FIFO basis.♦All times are in minutes.Step 3.Collect and process real system data. At the job shop, a Type 1 part arrives every 30 minutes, and a Type 2 part arrives every 20 minutes. It takes 2 minutes to route a Type 1 part and 10 minutes to route a Type 2 part to the drilling area. Parts wait in a queue till one of the two drilling machines becomes available. After drilling, Type 1parts are routed to the straightener and Type 2 parts are10Mariarouted to the finishing operator. After straightening, Type 1 parts are routed to the finishing operator.The operation times for either part were determined to be as follows. Drilling time is normally distributed with mean 10.0 and standard deviation 1.0. Straightening time is exponentially distributed with a mean of 15.0. Finishing requires 5 minutes per part.Step 4.Formulate and develop a model. A model of the system and the modification was developed using a simulation package. A trace verified that the parts flowed through the job shop as expected.Step 5.Validate the model. The utilization for a sufficiently long run of the original system was judged to be reasonable by the machine shop operators.Step 6.Document model for future use. The models of the original system and the modification were documented as thoroughly as possible.Step 7.Select appropriate experimental design. The original system and the modification described above were studied.Step 8.Establish experimental conditions for runs. Each model was run three times for 4000 minutes and statistical registers were cleared at time 1000, so the statistics below were collected on the time interval [1000, 4000]. At the beginning of a simulation run, there were no parts in the machine shop.Step 9.Perform simulation runs. Runs were performed as specified in Step 8 above.Step 10.Interpret and present results. Table 1 contains the utilization statistics of the three operations for the original system and the modification (in parentheses).Table 1: Utilization StatisticsDrilling Straightening Finishing Mean Run #1 0.83 (0.78) 0.51 (0.58) 0.42 (0.39) Mean Run #2 0.82 (0.90) 0.52 (0.49) 0.41 (0.45) Mean Run #3 0.84 (0.81) 0.42 (0.56) 0.42 (0.40) Std. Dev. Run #1 0.69 (0.75) 0.50 (0.49) 0.49 (0.49) Std. Dev. Run #2 0.68 (0.78) 0.50 (0.50) 0.49 (0.50) Std. Dev. Run #3 0.69 (0.76) 0.49 (0.50) 0.49 (0.49) Mean utilization represents the fraction of time a server is busy, i.e., busy time/total time. Furthermore, the average utilization output for drilling must be divided by the number of drills in order to get the utilization per drill. Each drill is busy about 40% of the time and straightening and finishing operations are busy about half the time. This implies that for the given work load, the system is underutilized. Consequently, the average utilization did not change substantially between the original system and the modification; the standard deviation of the drilling operation seems to have increased because of the increased randomness in the modification. The statistical significance of these observations can be determined by computing confidence intervals on the mean utilization of the original and modified systems.Step 11.Recommend further course of action. Other performance measures of interest may be: throughput of parts for the system, mean time in system for both types of parts, average and maximum queue lengths for each operation. Other modifications of interest may be: the flow of parts to the machine shop doubles, the finishing operation will be repeated for 10% of the products on a probabilistic basis.7 WHAT MAKES A PROBLEM SUITABLE FOR SIMULATION MODELING AND ANALYSIS?In general, whenever there is a need to model and analyze randomness in a system, simulation is the tool of choice. More specifically, situations in which simulation modeling and analysis is used include the following:♦ It is impossible or extremely expensive to observe certain processes in the real world, e.g., next year's cancer statistics, performance of the next space shuttle, and the effect of Internet advertising on a company's sales.♦ Problems in which mathematical model can be formulated but analytic solutions are either impossible (e.g., job shop scheduling problem, high-order difference equations) or too complicated (e.g., complex systems like the stock market, and large scale queuing models).♦ It is impossible or extremely expensive to validate the mathematical model describing the system, e.g., due to insufficient data.Applications of simulation abound in the areas of government, defense, computer and communication systems, manufacturing, transportation (air traffic control), health care, ecology and environment, sociological and behavioral studies, biosciences, epidemiology, services (bank teller scheduling), economics and business analysis.8 HOW TO SELECT SIMULATION SOFTWARE?Although a simulation model can be built using general purpose programming languages which are familiar to the analyst, available over a wide variety of platforms, and less expensive, most simulation studies today are implemented using a simulation package. TheIntroduction to Modeling and Simulation 11advantages are reduced programming requirements; natural framework for simulation modeling; conceptual guidance; automated gathering of statistics; graphic symbolism for communication; animation; and increasingly, flexibility to change the model. There are hundreds of simulation products on the market, many with price tags of $15,000 or more. Naturally, the question of how to select the best simulation software for an application arises. Metrics for evaluation include modeling flexibility, ease of use, modeling structure (hierarchical v/s flat; object-oriented v/s nested), code reusability, graphic user interface, animation, dynamic business graphics, hardware and software requirements, statistical capabilities, output reports and graphical plots, customer support, and documentation.The two types of simulation packages are simulation languages and application-oriented simulators (Table 2). Simulation languages offer more flexibility than the application-oriented simulators. On the other hand, languages require varying amounts of programming expertise. Application-oriented simulators are easier to learn and have modeling constructs closely related to the application. Most simulation packages incorporate animation which is excellent for communication and can be used to debug the simulation program; a "correct looking" animation, however, is not a guarantee of a valid model. More importantly, animation is not a substitute for output analysis.Table 2: Simulation PackagesType OfSimulationPackageExamplesSimulation languages Arena (previously SIMAN), AweSim! (previously SLAM II), Extend, GPSS, Micro Saint,SIMSCRIPT, SLXObject-oriented software: MODSIM III, SIMPLE++ Animation software: Proof AnimationApplication -Oriented Simulators Manufacturing: AutoMod, Extend+MFG,FACTOR/AIM, ManSim/X, MP$IM,ProModel, QUEST, Taylor II, WITNESS Communications/computer: COMNET III,NETWORK II.5, OPNET Modeler, OPNETPlanner, SES/Strategizer, SES/workbench Business: BP$IM, Extend+BPR, ProcessModel, ServiceModel, SIMPROCESS, Time machine Health Care: MedModel9BENEFITS OF SIMULATION MODELING AND ANALYSISAccording to practitioners, simulation modeling and analysis is one of the most frequently used operations research techniques. When used judiciously, simulation modeling and analysis makes it possible to:♦Obtain a better understanding of the system by developing a mathematical model of a system ofinterest, and observing the system's operation in detail over long periods of time.♦Test hypotheses about the system for feasibility.♦Compress time to observe certain phenomena over long periods or expand time to observe a complex phenomenon in detail.♦Study the effects of certain informational, organizational, environmental and policy changes on the operation of a system by altering the system's model; this can be done without disrupting the real system and significantly reduces the risk of experimenting with the real system.♦Experiment with new or unknown situations about which only weak information is available.♦Identify the "driving" variables - ones that performance measures are most sensitive to - and the inter-relationships among them.♦Identify bottlenecks in the flow of entities (material, people, etc.) or information.♦Use multiple performance metrics for analyzing system configurations.♦Employ a systems approach to problem solving.♦Develop well designed and robust systems and reduce system development time.10WHAT ARE SOME PITFALLS TO GUARD AGAINST IN SIMULATION?Simulation can be a time consuming and complex exercise, from modeling through output analysis, that necessitates the involvement of resident experts and decision makers in the entire process. Following is a checklist of pitfalls to guard against.♦Unclear objective.♦Using simulation when an analytic solution is appropriate.♦Invalid model.♦Simulation model too complex or too simple.♦Erroneous assumptions.♦Undocumented assumptions. This is extremely important and it is strongly suggested that assumptions made at each stage of the simulation modeling and analysis exercise be documented thoroughly.♦Using the wrong input probability distribution.♦Replacing a distribution (stochastic) by its mean (deterministic).♦Using the wrong performance measure.♦Bugs in the simulation program.♦Using standard statistical formulas that assume independence in simulation output analysis.♦Initial bias in output data.♦Making one simulation run for a configuration.12MariaIntroduction to Modeling and Simulation 13♦ Poor schedule and budget planning.♦ Poor communication among the personnel involvedin the simulation study.REFERENCESBanks, J., J. S. Carson, II, and B. L. Nelson. 1996.Discrete-Event System Simulation, Second Edition,Prentice Hall.Bratley, P., B. L. Fox, and L. E. Schrage. 1987. A Guideto Simulation, Second Edition, Springer-Verlag.Fishwick, P. A. 1995. Simulation Model Design andExecution: Building Digital Worlds, Prentice-Hall.Freund, J. E. 1992. Mathematical Statistics, Fifth Edition,Prentice-Hall.Hogg, R. V., and A. T. Craig. 1995. Introduction toMathematical Statistics, Fifth Edition, Prentice-Hall.Kleijnen, J. P. C. 1987. Statistical Tools for SimulationPractitioners, Marcel Dekker, New York.Law, A. M., and W. D. Kelton. 1991. SimulationModeling and Analysis, Second Edition,McGraw-Hill.Law, A. M., and M. G. McComas. 1991. Secrets ofSuccessful Simulation Studies, Proceedings of the1991 Winter Simulation Conference, ed. J. M.Charnes, D. M. Morrice, D. T. Brunner, and J. J.Swain, 21-27. Institute of Electrical and ElectronicsEngineers, Piscataway, New Jersey.Maria, A., and L. Zhang. 1997. Probability Distributions,Version 1.0, July 1997, Monograph, Department ofSystems Science and Industrial Engineering, SUNYat Binghamton, Binghamton, NY 13902.Montgomery, D. C. 1997. Design and Analysis ofExperiments, Third Edition, John Wiley.Naylor, T. H., J. L. Balintfy, D. S. Burdick, and K. Chu.1966. Computer Simulation Techniques, John Wiley.Nelson, B. L. 1995. Stochastic Modeling: Analysis andSimulation, McGraw-Hill.AUTHOR BIOGRAPHYANU MARIA is an assistant professor in the departmentof Systems Science & Industrial Engineering at the StateUniversity of New York at Binghamton. She receivedher PhD in Industrial Engineering from the University ofOklahoma. Her research interests include optimizing theperformance of materials used in electronic packaging(including solder paste, conductive adhesives, andunderfills), simulation optimization techniques, geneticsbased algorithms for optimization of problems with alarge number of continuous variables, multi criteriaoptimization, simulation, and interior-point methods.。
Numerical Modeling of Hydraulic Fractures Interaction in Complex Naturally Fractured Formations
ORIGINAL PAPERNumerical Modeling of Hydraulic Fractures Interaction in Complex Naturally Fractured FormationsOlga Kresse •Xiaowei Weng •Hongren Gu •Ruiting WuReceived:11December 2012/Accepted:14December 2012/Published online:10January 2013ÓSpringer-Verlag Wien 2013Abstract A recently developed unconventional fracture model (UFM)is able to simulate complex fracture network propagation in a formation with pre-existing natural frac-tures.A method for computing the stress shadow from fracture branches in a complex hydraulic fracture network (HFN)based on an enhanced 2D displacement disconti-nuity method with correction for finite fracture height is implemented in UFM and is presented in detail including approach validation and examples.The influence of stress shadow effect from the HFN generated at previous treat-ment stage on the HFN propagation and shape at new stage is also discussed.Keywords Hydraulic fracture network ÁNaturalfractures ÁUnconventional fracture model ÁStress shadow1IntroductionMulti-stage stimulation has become the norm for uncon-ventional reservoir development.However,one of the primary obstacles to optimizing completions in shale res-ervoirs has been the lack of hydraulic fracture models that can properly simulate complex fracture propagation often observed in these formations.Different modeling approaches recently have been developed to simulate complex fracture networks in natu-rally fractured formations (Xu et al.2009;Meyer andBazan 2011;Rogers et al.2010,2011;Dershowitz et al.2010;Nagel et al.2011;Nagel and Sanchez-Nagel 2011).Simulation of equivalent fracture network of parallel fractures developed by Xu et al.(2009)and Meyer and Bazan (2011)with simplified network geometry does not model complex interaction between fractures.Discrete fracture networks (DFNs)(Rogers et al.2010,2011;Der-showitz et al.2010)use simplified approach to model hydraulic fractures (HF)and natural fractures (NF)inter-action without considering stress shadow.More complex 3D simulators developed by Nagel et al.(2011),Nagel and Sanchez-Nagel (2011),and Fu et al.(2011)though being able to capture effects of hydraulic fracture interactions are CPU-intensive and not suitable for day-to-day engineering design and evaluations at the job site.More detailed description and comparison of existing models are given in Weng et al.(2011)and Kresse et al.(2011).A complex fracture network model,referred to as unconventional fracture model (UFM),had recently been developed (Weng et al.2011;Kresse et al.2011).The model simulates fracture propagation,rock deformation,and fluid flow in the complex fracture network created during a treatment.The model solves the fully coupled problem of fluid flow in the fracture network and elastic deformation of the fractures,based on similar assumptions and governing equations as conventional pseudo-3D (P3D)fracture models.Transport equations are solved for each component of the fluids and proppant pumped.A key dif-ference between UFM and the conventional planar fracture model is being able to simulate the interaction of hydraulic fractures with pre-existing natural fractures,i.e.,determine whether a hydraulic fracture propagates through or is arrested by a natural fracture when they intersect and subsequently propagates along the natural fracture.The branching of the hydraulic fracture at the intersection withO.Kresse (&)ÁX.Weng ÁH.Gu Schlumberger,Sugar Land,TX,USA e-mail:okresse@R.WuChevron,ETC.,Houston,TX,USARock Mech Rock Eng (2013)46:555–568DOI 10.1007/s00603-012-0359-2the natural fracture gives rise to the development of a complex fracture network.The natural fractures are cur-rently treated as closed weak planes.A crossing model that is extended from the Renshaw and Pollard(1995)interface crossing criterion,applicable to any intersection angle,has been developed(Gu and Weng2010)and validated against the experimental data(Gu et al.2011)and is integrated in the UFM.To properly simulate the propagation of multiple or complex fractures,the fracture model must take into account the interaction among adjacent hydraulic fracture branches,often referred to as‘‘stress shadow’’effect.It is well known that when a single planar hydraulic fracture is opened under afinitefluid net pressure,it exerts a stress field on the surrounding rock that is proportional to the net pressure.In the limiting case of an infinitely long vertical fracture of a constantfinite height,the analytical expres-sion of the stressfield exerted by the open fracture was provided by Warpinski and Teufel(1987),and Warpinski and Branagan(1989).It shows that the net pressure(or more precisely,the pressure that produces the given frac-ture opening)exerts a compressive stress in the direction normal to the fracture on top of the minimum in situ stress, which is equal to the net pressure at the fracture face,but quickly falls off with the distance from the fracture.At a distance beyond one fracture height,the induced stress is only a small fraction of the net pressure.Thus,the term ‘‘stress shadow’’is often used to describe this increase of stress in the region surrounding the fracture.If a second hydraulic fracture is created parallel to an existing open fracture,and if it falls within the‘‘stress shadow’’(i.e.,the distance to the existing fracture is less than the fracture height),the second fracture will in effect see a closure stress greater than the original in situ stress.As a result,it will require a higher pressure to propagate the fracture, and/or the fracture will have a narrower width,as com-pared to the corresponding single fracture.One application of stress shadow is for design and optimization of the fracture spacing between multiple fractures propagating simultaneously from a horizontal wellbore.In ultra low permeability shale formations,it is desirable to have fractures closely spaced for effective reservoir drainage.However,the stress shadow effect may prevent a fracture propagating in close vicinity of other fractures(Fisher et al.2004).The interference between parallel fractures has been studied since1980’s(Meyer and Bazan2011;Warpinski and Teufel1987;Narendran and Cleary1983;Britt and Smith2009;Cheng2009; Roussel and Sharma2010).Most of the studies are for parallel fractures under static conditions.A well known effect of stress shadow is that fractures in the middle region of multiple parallel fractures have smaller width because of the increased compressive stresses from neighboring fractures(Germanovich and Astakhov2004; Olson2008).When multiple fractures are propagating simultaneously,theflow rate distribution into the frac-tures is a dynamic process and is affected by the net pressure of the fractures.The net pressure is strongly dependent on fracture width,and hence,the stress shadow effect onflow rate distribution and fracture dimensions warrants further study.The dynamics of simultaneously propagating multiple fractures also depends on the relative positions of the initial fractures.If the fractures are parallel,e.g.,in the case of multiple fractures that are orthogonal to a horizontal wellbore,the fractures tend to repel each other,resulting in the fractures curving outward.However,if the multiple fractures are arranged in an en echelon pattern,e.g.,for fractures initiated from a horizontal wellbore that is not orthogonal to the fracture plane,the interaction between the adjacent fractures may be such that their tips attract each other and even connect(Olson1990;Yew et al.1993; Weng1993).When a hydraulic fracture intersects a secondary frac-ture oriented in a different direction,it exerts an additional closure stress on the secondary fracture proportional to the net pressure.Nolte(1991)derived this stress and takes it into account in thefissure opening pressure calculation in the analysis of pressure-dependent leakoff infissured formation.For more complex fractures,a combination of various fracture interactions as discussed above is present.To properly account for these interactions,while still being computationally efficient so it can be incorporated in the complex fracture network model,a proper modeling framework needs to be constructed.This article describes a method that is based on an enhanced2D displacement discontinuity method(DDM)by Olson(2004)for com-puting the induced stresses on any given fracture and in the rock from the rest of the complex fracture network.Frac-ture turning is also modeled based on the altered local stress direction ahead of the propagating fracture tip due to the stress shadow effect.The simulation results from the UFM model that incorporates the fracture interaction modeling are presented.2UFM Model DescriptionTo simulate the propagation of a complex fracture network that consists of many intersecting fractures,the equations governing the underlying physics of the fracturing process must be satisfied.The basic governing equations include equation governing thefluidflow in the fracture network, the equation governing the fracture deformation,and the fracture propagation/interaction criterion.556O.Kresse et al.Continuity equation assumes that fluid flow propagates along fracture network with the following mass conservationo q o s þo ðH fl "wÞo tþq L ¼0;q L ¼2h L u Lð1Þwhere q is the local flow rate inside the hydraulic fracturealong the length,"wis an average width or opening of the fracture at position s =s (x,y ),H fl(s,t )is the local height of the fracture occupied by fluid,and q L is the leak-off volume rate through the wall of the hydraulic fracture into the rock matrix per unit length (leak-off height h L times velocity u L at which fracturing fluid infiltrates into surrounding per-meable medium),which is expressed through Carter’s leak-off model.The fracture tips propagate as sharp front and the total length of the entire hydraulic fracture networks (HFNs)at any given time t is defined as L (t ).The properties of injected fluid are defined by power-law exponent n 0(fluid behavior index)and consistency index K 0.The fluid flow could be laminar,turbulent,or Darcy flow through proppant pack,and is described cor-respondingly by different laws.For the general case of 1D laminar flow of a power-law fluid in any given fracture branch,the Poiseuille law (Mack and Warpinski 2000)can be appliedo p o s ¼Àa 01"w 2n 0þ1q H fl q H fl n 0À1ð2Þwitha 0¼2K 0u n 0ðÞn0Á4n 0þ2n 0 n;u n 0ðÞ¼1H fl Z H flw ðz Þ"w2n 0þ1n 0d z ð3ÞHere,w (z )represents fracture width as a function of depth at the current position s (x,y ).Fracture width is related to fluid pressure through the elasticity equation.The elastic properties of the rock (considered as isotropic linear elastic material)are defined by Young’s modulus E and Poisson’s ratio m .For a vertical fracture in a layered medium with variable minimum and maximum horizontal stresses (r h (x,y,z )and r H (x,y,z ))and fluid pressure p ,the width profile can be determined from an analytical solution given as w ðx ;y ;z Þ¼w ðp ðx ;y Þ;h ;z Þð4ÞBecause the height of the fractures h varies,the set of governing equations also include the height growth calculation based on the approach described in Kresse et al.(2011).K Iu ¼ffiffiffiffiffiffip h 2r p cp Àr n þq f g h cp À34h !þffiffiffiffiffiffi2p h r X n À1i ¼1ðr i þ1Àr i Þh 2arccosh À2h ih Àffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffih i ðh Àh i Þp !K Il ¼ffiffiffiffiffiffip h 2r p cp Àr n þq f g h cp Àh4 !þffiffiffiffiffiffi2p h r X n À1i ¼1ðr i þ1Àr i Þh 2arccosh À2h ihþffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffih i ðh Àh i Þp !ð5Þwhere r i and h i are the minimum stress and distance fromtop of the i th layer to fracture bottom tip,p cp is the fluid pressure at a reference (perforation)depth h cp measured from the bottom tip,and K Iu and K Il are the stress intensity factors at the top and bottom tips of the fracture.The equilibrium model,which calculates fracture height based on the pressure at each position of the fracture by matching Stress Intensity Factors K Iu and K Il ,given by Eq.(5),to the fracture toughness of the corre-sponding layer containing the tips,is extended to a non-equilibrium model.The non-equilibrium height growth calculation takes into account the pressure gradient due to the fluid flow in the tip regions in the vertical direction by adding apparent toughness proportional to the fracture’s top and bottom velocities.Then fracture width w (z )at any position z measured from the bottom tip is given by Eq.(6).w ðz Þ¼4E 0p cp Àr n þq f g h cp Àh 4Àz 2!ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiz ðh Àz Þp þ4X n À1i ¼1ðr i þ1Àr i Þðh i Àz Þcosh À1z h À2h ihÀÁþh i z Àh i j j þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiz ðh Àz Þp arccosh À2h i h2666437775ð6ÞNote that one of the limitations of UFM model,the same as for the conventional P3D models,is related to the accurate height growth calculations in the cases of complicated vertical stress profile.For the height being calculated for each fracture element,UFM model assumes that reservoir elastic properties are homogeneous,and averaged over all layers containing fracture height.Since confining stress dominates elastic properties when computing fracture width,this assumption is reasonable for many cases (Adachi et al.2007).P3D models’results are in good agreement with Planar3D models for not too complex stress profiles,and present fast and accurate engineering tools for most field applications.In addition to equations described above,the global volume balance condition must be satisfiedNumerical Modeling of Hydraulic Fractures Interaction 557Z t 0QðtÞd t¼Z LðtÞhðs;tÞ"wðs;tÞd sþZH LZ tZ LðtÞ2u L d s d t d h Lð7Þi.e.,the total volume offluid pumped during time t is equal to volume offluid in fracture network and volume leaked from the fracture up to time t.The boundary conditions require theflow rate,net pressure,and fracture width to be zero at all fracture tips.The total network consists of two major parts:Fracture Network and Wellbore.These two networks communicate through injection elements to account for perforation friction.The system of Eqs.(1)–(7),together with initial and boundary conditions,plus equations governingfluidflow in the wellbore and through the perforations represent the complete set of governing equations(Kresse et al.2011). Combining these equations and discretizing the fracture network into small elements leads to a nonlinear system of equations in terms offluid pressure p in each element,simplified as f(p)=0,which is solved by using damped Newton–Raphson method.Fracture interaction is one of the most important factors, which must be taken into account to model hydraulic fracture propagation in naturally fractured reservoirs.This includes the interaction between hydraulic fractures and natural fractures,as well as interaction between hydraulic fractures.For the interaction between hydraulic and natural fractures,a semi-analytical crossing criterion is imple-mented in UFM based on the approach described in(Gu and Weng2010;Gu et al.2011).The influence of per-meability and pore pressure effect onfluid loss into the NFs is not accounted for now,and natural fractures are treated as closed weak planes.This article focuses on modeling the interaction between hydraulic fractures.Mention that poroelastic effects currently are not included in UFM model.It is observed that in unconven-tional formations(shales)changes in pore pressure due to leakoff into the matrix are in order of inches from the fracture,so poroelastic effect may be considered negligible.3Modeling Stress ShadowFor parallel fractures,the stress shadow can be represented by the superposition of stresses from neighboring fractures. The stressfield around a2D fracture with internal pressure p can be calculated from Sneddon(1946)and Sneddon and Elliott(1946)solutions.The stress normal to the fracture is r x(Fig.1)and can be calculated from r x¼p1À"Lffiffiffiffiffiffiffiffiffiffi"L1"L2p cos hÀh1þh22À"L"L1"L2ðÞ3=2sin h sin32ðh1þh2Þ2666437775ð8Þh¼arctanÀ"x"yh1¼arctanÀ"x1þ"y;h2¼arctan"x1À"yAnd"x;"y;L;L1;L2are the coordinates and distances in Fig.1normalized by the fracture half-height h/2.Since r x varies in the y-direction as well in the x-direction,an averaged stress over the fracture height is used in the stress shadow calculation.The analytical equation(8)can be used to compute the average effective stress of one fracture on an adjacent parallel fracture and include it in the effective closure stress on that fracture.For more complex fracture networks,the fractures may orient in different directions and intersect each other.A more general approach is required to compute theeffectiveFig.2Stress shadow effect558O.Kresse et al.stress on any given fracture branch from the rest of the fracture network.In UFM,the mechanical interactions between fractures are modeled based on an enhanced2D DDM(Olson2004)for computing the induced stresses (Fig.2).In a2D,plane-strain,displacement discontinuity solu-tion,Crouch and Starfield(1983)described the normal and shear stresses(r n and r s)acting on one fracture element induced by the opening and shearing displacement dis-continuities(D n and D s)from all fracture elements.To account for the3D effect due tofinite fracture height, Olson(2004)introduced a3D correction factor to the influence coefficients C ij.The modified elasticity equations of2D DDM are as follows:r in¼X Nj¼1A ij C ijnsD jsþX Nj¼1A ij C ijnnD jnr i s¼X Nj¼1A ij C ij ss D j sþX Nj¼1A ij C ij sn D j nð9Þwhere C ij are the2D,plane-strain elastic influence coefficients,and their expressions can be found in Crouch and Starfield(1983).The matrix[C]defines the interaction between elements,e.g.,C ns ij gives the normal stress at the midpoint of the element i due to shearNumerical Modeling of Hydraulic Fractures Interaction559displacement discontinuity at the element j ,and C nn ij givesthe normal stress at the midpoint of the element i due to an opening displacement discontinuity at the element j .The 3D correction factor A ij suggested by Olson (2004)is introduced to the influence coefficients to account for the 3D effects due to finite fracture height that leads to decaying of interaction between any two fracture elements when distance between them increasesA ij¼1Àd b ijd 2ij þðh =a Þ2h i b =2ð10Þwhere h is the fracture height,d ij is the distance between elements i and j ,a =1and b =3.2are empirically derived constants (Olson 2008;Laubach et al.2004).Eq.(10)clearly shows that the 3D correction factor leads to decaying of interaction between any two fracture elements when the distance increases.In UFM model,at each time step,the additional induced stresses due to the stress shadow effects are computed.We assume that at any time,fracture width equals the normal displacement discontinuities (D n )and shear stress at the fracture surface is zero,i.e.,D n j =w j ,r s i=0.Substituting these two conditions into Eq.(9),we can find the shear displacement disconti-nuities D s and normal stress induced on each fracture element r n .The effects of the stress shadow-induced stresses on the fracture network propagation pattern are twofold.First,during pressure and width iteration,the original in situ stresses at each fracture element are modified by adding theTable 1Input data for validation against CSIRO model Injection rate 0.1m 3/s Stress anisotropy 0.9MPa Young’s modulus 391010Pa Poisson’s ratio 0.35Fluid viscosity 0.001Pa-s Fluid Specific Gravity 1.0Min horizontal stress 46.7MPa Max horizontal stress 47.6MPa Fracture toughness 1MPa-m 0.5Fracture height120m560O.Kresse et al.additional normal stress due to the stress shadow effect.This directly affects the fracture pressure and width dis-tribution,which results in a change on the fracture growth.Second,by including the stress shadow induced stresses (normal and shear stresses),the local stress fields ahead the propagating tips are also altered,which may cause the local principal stress direction to deviate from the original in situ stressdirection.Fig.6Comparison of propagation paths for two initially parallel fractures in isotropic and anisotropic stressfieldsFig.7Comparison of propagation paths for two initially offset fractures in isotropic and anisotropic stressfieldsFig.8Propagation paths for two fractures under isotropic far-field stress field depending on the relative positions of injection pointsNumerical Modeling of Hydraulic Fractures Interaction 561Thus,the local stresses around each tip elementr tip xx ;r tip yy ;r tipxy calculated by enhanced DDM approach arecombined with far-field stresses r 1xx ;r 1yy ;r 1xy r tot xx ¼r 1xx þr tip xx r tot yy ¼r 1yy þr tip yy r tot xy ¼r 1xy þr tip xyð11Þto define local principal stresses and orientation (angle a )of local maximum stress around tip elements byr 1¼r tot xxþr tot yy2þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðr tot xy Þ2þðr tot xx Àr tot yy Þ24s r 3¼r tot xx þr totyy 2Àffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðr tot xy Þ2þðr tot xx Àr tot yy Þ24s a ¼12arctan 2r tot xyr xx Àr yyð12ÞThis altered local principal stress direction may result infracture turning from its original propagation plane and further affects the fracture network propagation pattern.4Validation of Stress ShadowValidation of UFM model for the cases of bi-wing fractures has been presented before (Kresse et al.2011;Weng et al.2011).This article focuses on the validation of stress sha-dow modeling approach.4.1Comparison of Enhanced 2D DDM to Flac3D The 3D correction factors suggested by Olson (2004)contain two empirical constants,a and b .Olson calibrated the values of a and b by comparing stresses obtained from numerical solutions (enhanced 2D DDM)to the analytical solution for a plane-strain fracture with infinite length and finite height.In this work,the model is further validated by comparing the 2D DDM results to full three-dimensional numerical solutions,utilizing FLAC3D (Itasca Consulting Group Inc,2002),for two parallel straight fractures with finite lengths and heights.The validation problem is shown in Fig.3.Table 2Input parameters for case of five parallel fractures Young’sl modulus 4.591010Pa Poisson’s ratio 0.35Rate 0.032m 3/s Viscosity 0.001Pa-s Height30mLeakoff coefficient 3.9910-2m/s 1/2Stress anisotropy 1.4MPa Fracture spacing 20m No.of perfs per frac100Fig.9Transverse parallel fracture in horizontalwellFig.11Fracture geometry and width (in m)for the case of five fractures5101520253035404550F r a c t u r e l e n g t h (f t )Time (min)Fig.10Length of five parallel fractures (xf1–xf5,fracture 3is at the center,and fractures 1and 5are outmost ones)during injection.The curves with markers are calculated from the simplistic PKN model and the curves without markers are from UFM model562O.Kresse et al.The fracture in Flac3D is simulated as two surfaces at the same location but with unattached grid points.Constant internalfluid pressure is applied as the normal stress on the grids.Fractures are also subjected to remote stresses,r x and r y.Two fractures have the same length and height with the ratio of height/half-length=0.3.Stresses along x-axis (y=0)and y-axis(x=0)are compared.Two closely spaced fractures(s/h=0.5)have been simulated and compared(Fig.3).As shown in Figs.4,5,the stresses simulated from the enhanced2D DDM approach with3D correction factor closely match those from the full3D simulator results.This indicates that the correction factor allows capture of the3D effect from the fracture height on the stressfield.In the mean time,simple2D DDM approach shows significant differences from full3D simulator results due to in-ability to capture effect of fracture height(fracture height is assumed infinite and influence from elements is only due to distance between them).This can be seen by comparing Figs.4and5,showing the distribution of stresses r x and r y along y-axis,and r y along x-axis for the cases when distance between fractures is small(s/h=0.5) compared to the fractures height,and when this distance is relatively large(s/h=3.3).4.2Comparison to CSIRO ModelThe UFM model that incorporates the enhanced2D DDM approach is validated against full2D DDM simulator incorporating a full solution for coupled elasticity and fluidflow equations by CSIRO(Zhang et al.2007)in the limiting case of very large fracture height(because2D DDM approach does not consider the3D effect due to the fractures’height).The comparison of the influence of two closely propagating fractures on each other’s propagation paths has been provided.The propagation of two hydraulic fractures initiated parallel to each other(prop-agating along local maximum stress direction)has been simulated for two configurations,with initiation points aligned along the y-axis and offset from each other for isotropic and anisotropic farfield stresses.The fracture propagation path and pressure inside of each fracture has been compared for UFM and CSIRO code for the input data given in Table1.When two fractures are initiated parallel to each other with initiation points separated by d x=0,d y=10m (the maximum horizontal stressfield is oriented in the x-direction),they turn away from each other due to the stress shadow effect.The propagation paths for isotropic and anisotropic stressfields are shown in Fig.6.Compared with the isotropic case,the curvatures of the fractures in the case of stress anisotropy are smaller.This is due to the competition between the stress shadow effect, which tends to turn fractures away from each other,and the far-field stresses that push fractures to propagate in the direction of maximum horizontal stress(x-direction). The influence of the far-field stress becomes dominant as the distance between the fractures increases,in which case the fractures tend to propagate parallel to the maximum horizontal stress direction(Fig.8a,b).The same conclusion about far-field stresses is applica-ble for the case when two fractures are initiated parallel to each other with initiation points separated by d x=10m, d y=10m(Fig.7).The numerical study presented above shows that the enhanced2D DDM approach implemented in UFM model is able to capture the3D effects offinite fracture height on fracture interaction and propagation pattern,while being computationally efficient.It provides good estimation of the stressfield for a network of vertical hydraulic fractures and fracture propagation direction(pattern).5Examples5.1Influence of Stress Shadow on FracturePropagation PathMore results of UFM simulations showing the influence of stress shadow on the fracture propagation pathdepending Fig.12Fracture geometry andfluid pressure(Pa)for the cases when distance between injection points is equal to10,20,and40m Numerical Modeling of Hydraulic Fractures Interaction563。
数学模型与数学建模(Mathematical model and mathematical modeling)
数学模型与数学建模(Mathematical model and mathematicalmodeling)Edit reference materials for this competitionCompetition reference bookL, Chinese Undergraduate Mathematical Contest in modeling, edited by Li Daqian, higher education press (1998).2, mathematical modeling contest tutorials, (a) (two) (three), edited by Ye Qixiao, Hunan Education Publishing House (199319971998).3, mathematical modeling education and international mathematics modeling contest "Engineering Mathematics" album, leaves its filial., "Engineering Mathematics" magazine, 1994).Two, domestic teaching materials, books1, mathematical model, Jiang Qiyuan, higher education press (1987 edition, 1993 second edition; the first edition heldin 1992 by the National Education Committee, the second national outstanding teaching award won the "national outstanding teaching award"), mathematical model and computer simulation of.2, Jiang Yuzhao and Xin Pei love series, electronic science and Technology University Press, (1989).3, a mathematical model about selection (to mathematics from the book), Hua Luogeng, Wang Yuan, Wang Ke, Hunan education press; (1991) with the example of.4, mathematical modeling method, Shou Jilin et al, Xi'an Jiao Tong University press (1993),.5 model, Dongpu set country, edited by Tian Yuwen, Southeast University press (1994) the mathematical model of.6.., Zhu Siming, Li Shanglian, Zhongshan University press, 7 (1995), mathematical model,edited by Chen Yihua, Chongqing University press, (1995) 8, mathematical modeling analysis, edited by Cai Changfeng, Science Press,.9 (1995), mathematical modeling contest tutorials, edited by Li Shangzhi, Jiangsu Education Press, (1996).10, mathematical modeling entry, Xu Quanzhi, Yang Jinhao, Chengdu Electronic Science and Technology Press, 11. (1996), mathematical modeling, Shen Jihong, Shi Jiuyu, Gao Zhenbin Zhang Xiaowei, ed., Harbin Engineering University press, 12. (1996), mathematical models, edited by Wang Shuhe, University of Science & Technology China press, 13. (1996), mathematical model method, Jihuan edited, China University of science and Technology Press, (1996).14, mathematical modeling and experiment, Nanjing Engineering College Mathematical Modeling and Industrial Mathematics discussion class, Hohai University press, (1996).15, mathematical model and mathematical modeling, Liu Laifu and Zeng literary series, Beijing Division Fan Du University Press (1997).16. mathematical modeling, Yuan Zhendong, Hong Yuan, Lin Wuzhong, Jiang Lumin, East China NormalUniversity press, 17. Mathematical model, Tan Yongji, Yu Wenpi, Fudan University press, (1997).18, the mathematical model of practical course, Fei Peizhi, Yuan layer process editor, Sichuan University press, (1998).19, mathematical modeling the outstanding cases (Base Construction Engineering Mathematics Series), edited by Wang Guoqiang, South China University of Technology press, (1998).20, economic mathematical model (Second Edition) (construction engineering mathematics base, Hong Yi, He Dehua, Cong Books), edited by Chang Zhihua, South China University of Technology press, (1999).21, the mathematical model of lectures, Gongyan Lei, (Peking University press 1999).22,mathematical modeling cases, edited by Zhu Daoyuan, Southeast University press, (1999), 23, solve the problemof the mathematical model, Liu Laifu, once wrote, theBeijing Normal University press, (1999).24, mathematical modeling theory and practice, Wu Xiang, Ng Man Tat, Cheng Ortega ed., National University of Defense Technology press, (1999).25 analysis, mathematical modeling case, Bai Qi Ling, editor, Ocean Press,.26 (2000, Beijing) (College of mathematics experiment, the selection of teaching materials, Xie Yunsun Zhang Zhirang Series), ed., Science Press,.27 (2000), Fu Peng, Gong Lei, mathematical experiment, Liu Qiongsun, He Zhong, ed., Science Press, (2000).Three. Foreign reference books (Chinese version)1. Introduction to mathematical model, E.A. Bender, Zhu Yaochen, Xu Weixuan, Popular Science Press (1982). 2, the mathematical model, [door] Kondo Jiro, Guan Rong Zhang: Mechanical Industry Press, (1985).3, the differential equation model (model series volume first), beauty editor of]W.F.Lucas, Zhu Yumin et al., National University of Defense Technology press, (1988),.4 (political and related models, the application of mathematical model series Vol. second) [W.F.Lucas, beauty editor, Wang Guoqiu et al., National University of Defense Technology press, (1996).5, and the discrete system model (model series volume third), beauty editor of w.F.Lucas, a Ortega et al., National University of Defense Technology press, (1996) model,.6 (Life Sciences, applied mathematics model in fourth volumes), beauty editor of 1W.F.Lucas, ZhaiXiaoyan et al., National University of Defense Technology press, (1996).7, the mathematical model of continuous dynamical system, and discrete dynamical systems,1H.B.Grif6ths and A.01dknow [English, Xiao Li, Zhijun (compiler, Science Press, 1 996).8, mathematical modeling -- case study from four industries in the United Kingdom, (Applied Mathematics Series No. fourth), theBritish]D.Burglles, Ye Qixiao, Wu Qingbao, World Book Inc, (1997)Four, professional reference books1, the water environment mathematical model,de]W.KinZE1bach, Yang Rujun, Liu Zhaochang, editor, China Architecture Industry Press, (1987) the mathematical model of.2 science and technology engineering, Humphreys Anqi ed., Railway Press (1988), 3 biomedical model, Qingyi science edited by Hunan science and Technology Press (1990) model and application of.4, crop pest management mathematics, Pu Zhelong ed., Guangdong science and Technology Press (1990),.5 in system science and mathematics model, editedby Ouyang Liang E, Shandong University press, (1995) the mathematical modeling and research of.6, population ecology, Ma Temple, Anhui Education Press, 7, (1996), modeling new progress in the transformation, optimization, comprehensive method, structure of Sui Yunkang, Dalian University of Technology press, 8, (1986) the genetic model analysis method, Zhu Jun, agriculture press China (1 997). (editedby Wang Shousong, Department of mathematics, Zhongshan University, April 2001)Editing the format requirements of this paragraphA team from A,B in the optional one, group B teams from C, D choose a topic. The white A4 paper printed on one side;on each side set aside at least 2.5 cm from the left margin; binding. The first page of the paper is a commitment, and the specific content and format are shown in the secondpage of this specification. The second page number for the special page, front and back for the regional and national review of the paper number, specific content and format see page third of this specification. The title and abstract of the paper are written on the third page of the paper, starting from the fourth page, and the main body of the paper. The paper starts with third pages, the page number must be located in the middle of each page footer, with Arabia number from "1" start serial number. There is no header in the paper, and there is no sign in the paper that can show the identity of the person who answers the question. The title of this paper is "three" boldface, and the first title is in boldface No. four, and centered. This paper adopts four other Chinese characters Song typeface, with single spaced pages, print should be avoided in color printing. Abstract: draw attention should be a detailed summary of the concise and to the point (including keywords), occupies an important weight in the whole paper review, please carefully write (note the length of no more than one page, and there is no need to be translated into English). The review will first according to the quality of the paper and the overall structure of the thesis and overview of the preliminary screening. The quotation ofother's achievements or other public information (includingthe data found on the Internet) must be clearly listed in the references and references in accordance with the provisions of the reference. The reference in the text uses square brackets to mark the reference number, such as[1][3], etc., and the book must also point out the page number. The references are listed in the quotation order of the text, in which the book is expressed as: author, title, publication place, publishing house, publishing year. The methods of expression of journal articles in reference books are: author, paper name, Journal name,Volume number, page number, year of publication. The reference resources in the literature are: author, resource title, URL, access time (month, date). In the premise of not breaking the regulations, each division can increase the other requirements (such as adding other pages and other information on the first page of this specification before or at the end of this paper add blank page etc.); from the beginning to the end of the undertaking, the division shall not have any other requirements of this specification the (or null). The right of interpretation belongs to the Organizing Committee of the National Mathematical Contest for modeling students. [note] division marking the papers before the first page take preservation, and to establish "division marking numbers in the first and second pages" (by the way, "the provisions of division number) division table can be used for marking the record review (division each division to decide whether to use the form in review). After review, the division sent to the national review papers to establish a national unified numbering in the second page "(numbering by the organizingcommittee, and last year the same format), and then sent to the national review. The second page (page number) preserved by the National Organizing Committee review before take off, and the establishment of the national review number on page second". The National College Mathematical Contest in modeling was revised in September 12, 2008Edit the competition GuideWhat is mathematical model and mathematical modeling?Simply put: mathematical models are a mathematical expression of practical problems. Specifically, the mathematical model is an abstract, simplified mathematical structure of some real world for some purpose. Rather, the mathematical model is for a specific object to a specific target, according to the unique inherent laws, make some simplifying assumptions necessary, using appropriate mathematical tools, a mathematical structure is obtained. Mathematical structures can be mathematical formulas, algorithms, tables, diagrams, etc.. Mathematical modeling is the establishment of mathematical models, the process of establishing mathematical models is the process of mathematical modeling (see mathematical modeling process flow chart). Mathematical modeling is a mathematical thinking method, is the use of mathematical language and methods, through the abstract and simplify the establishment of an approximate description and "solve" practical problems of a powerful mathematical means.First, the mechanism analysis method: the model is deduced from the basic physical law and the structural data of the system. 1. scale analysis -- the most basic and most commonly used method to establish the functional relationship among variables. 2. algebraic method -- the main method for solving discrete problems (discrete data, symbols and graphs). 3. logic method is an important method of mathematical theory research. It is widely used in the fields of sociology and economics, in decision-making, countermeasures and other disciplines. 4. ordinary differential equation - to solve the law of variation between two variables, the key is to establish the expression of "instantaneous rate of change". 5. partial differential equation -- solving the law of variation between dependent variable and more than two independent variables. Two. Data analysis method establishes mathematical model by using statistical method from a large number of observation data. 1. regression analysis - a set of observations (Xi, FI) i=1,2 for function f (x)... N, which determines the expression of a function, is called a mathematical statistical method because it is a static independent data. 2. time series analysis deals with dynamic related data, also known as process statistics. 3. regression analysis - a set of observations (Xi, FI) i=1,2 for function f (x)... N, which determines the expression of a function, is called a mathematical statistical method because it is a static independent data. 4. time series analysis deals with dynamic related data, also known as process statistics. Three, simulation and other methods 1. computer simulation (simulation) - essentially statistical estimation method, equivalent to the sampling test.Discrete system simulation - there is a set of state variables. Continuous system simulation with analytic expression or system structure diagram. 2. factor test method -- local test on the system, then according to the test results for continuous analysis and modification,The required model structure is obtained. 3. artificial reality method, based on the understanding of the past behavior of the system and the desired future goals, and taking into account the possible changes in the relevant factors of the system, artificially forming a system. (see: Qi Huan, mathematical modeling method, Huazhong University of science and Technology Press, 1996)IV. types of questionsMatch questions structure has the following parts: background, problems involving wide 1. - social, economic, management, life, environment, natural phenomena, engineering technology, modern science in the new issue. 2. generally, there is a definite practical problem. Two, some assumptions are as follows: 1. only the process and rules of qualitative assumptions, no specific quantitative data;2. are some survey or statistics;3. gives a number of parameters or graphics;4. contains some assumptions of mobility, can play, or players can according to their own collection or simulated data. Three, asked to answer the question often have several problems (generally not only answer: 1.) more definitive answers (basic answers); 2. more detailed or high-level discussion results (often is the optimal scheme formulation and results).Competition answer paperTo submit a paper, the basic content and format is roughly divided into three parts: first, the title, abstract part:1. topics - write a more precise topic (not only write A,B). 2. Abstract --200-300 words, including the main features of the model, modeling methods and main results.3., when there is more content, it is better to have a directory. Two, the central part: 1. problem raised, problem analysis. 2. models: the complementary hypothesis, clear concept, the introduction of the model parameters; form (with multiple models); for the model; the model of nature; the realization of computer design and calculation method of the 3.4. result analysis and test.5. discuss the advantages and disadvantages of the model, improve the direction, and promote new ideas.6. references -- attention format. Three. Appendix: 1. calculation program, block diagram. 2. solving the calculus and calculating the intermediate result. 3. various graphics and forms.Edit this paragraph competition questions collection1992 (A) fertilizer effect analysis problem (Ye Qixiao: Beijing Institute of Technology) (B) experimental data decomposition (East China University of Science and Technology: Yu Wen; Fudan University: Tan Yongji) 1993 (A) frequency design problem of nonlinear intermodulation (Peking University: Xie Zhongjie) (B) football ranking problem (Tsinghua University: Cai Dayong) 1994 (A) of cut paths through mountains (He Dake: Xi'an Electronic andScience University) (B) the problem of packing locks (Fudan University: Tan Yongji, East China University of Scienceand Technology: Yu Wenci) 1995 (A) flight management problems (Fudan University: Tan Yongji, East ChinaUniversity of Science and Technology: Yu Wenci) (B) scheduling problem of crane and smelting furnace (Zhejiang University: Liu Xiangguan, Li Ji Luan) 1996 (A) the problem of optimal fishing strategy (Beijing Normal University: Liu Laifu) (B) of water-saving washing machine ask Question (Chongqing University: Fu Li) in 1997 (A) design parameters of parts (Tsinghua University: Jiang Qiyuan) (B) cutoff problem (Fudan University: Tan Yongji,East China University of Science and Technology: Yu Wenci) 1998 (A) risk and return of investment (Chen Shuping: Zhejiang University) (B) routing problem (disaster tour of Shanghai Maritime University: Ding Songkang) 1999 (A) automatic lathe management problems (Peking University: Sun Shanze) (B) drilling layout problem (Zhengzhou University: Lin Yixun) (C) of coal accumulation gangue (Taiyuan University of Technology: Jia Xiaofeng) (D) drilling layout (Zhengzhou University: Lin Yixun) 2000 (A) DNA sequence classification (Meng Dazhi: Beijing University of Technology) (B) order and transportation of steel tubes (Wuhan University: Fei Fusheng) (C) over the Arctic problem (Fudan University: Tan Yongji) (D) (Northeast Dianli University: the problem of detecting cavity the letter of 2001) (A) 3D reconstruction of vessels (Zhejiang University, Wang Guozhao) (B) bus scheduling problem (Tsinghua University: Tan Zeguang) (C) the problem of using funds (Southeast University: Chen Enshui) (D) bus schedulingproblem (Tsinghua University: Tan Zeguang) 2002 (A) the optimization problem of the headlight design (Tan Yongji: Fudan University, East China University of Science and Technology: Yu Wenci) (B) (mathematical problems in lottery The PLA Information Engineering University: Han g) (C) the optimization problem of the headlight design (Tan Yongji: Fudan University, East China University of Science and Technology: Yu Wen) (D) schedule problem (Tsinghua University: Jiang Qiyuan) 2003 (A) spread SARS (LOC) (B) vehicle scheduling problems in open-pit mine production (the Jilin University: Peichen (party) the problem of SARS (C) communication committee) (D) crossing Yangtze River (Huazhong Agricultural University: Yin Jiansu) 2004 (A) Temporary Supermarket Design Problems (Beijing University of Technology: Meng Dazhi) (B) power transmission congestion management (Zhejiang University: Liu Kangsheng) (C) drunk driving problem (Tsinghua University: Jiang Qiyuan) (D) recruitment problem (The PLA Information Engineering University: Han Zhonggeng) 2005 (A) evaluation of water quality of Yangtze River and prediction problem (Han Zhonggeng: The PLA Information Engineering University) (B) DVD online leasing problem (Tsinghua University: Xie Venus) (C) evaluation of rainfall forecast methods (Tan Yongji: Fudan University) (D) DVD online leasing problem (Tsinghua University: Xie Venus, 2006) (A) (Beijing University of Technology press the issue of resource allocation: Meng Dazhi) (B) the prediction problem of AIDS therapy evaluation and the effect of (Tianjin University: Fu Ping) (C) to optimize the cans The problem of designing (Beijing Institute of Technology: Ye Qixiao) (D) monitoring and control of coal mine gas and coal dust (The PLAInformation Engineering University: Han Zhonggeng) 2007 (A) China population growth forecast (B) bus, look at the Olympic Games (C) mobile phone packages preferential geometric (D) body test schedule in 2008 (A) digital camera positioning (B), the standard of higher education tuition, ground search (C), (D) analysis and evaluation of the NBA Calendar 2009 (A) control method of the brake test rig (B) reasonable arrangement for ophthalmic beds (C) satellites and spacecraft tracking control (D) Conference 2010 (A) storage tank the identification and calibration of tank capacity table (B) quantitative assessment of World Expo's influence in Shanghai in 2010 (C) pipeline layout (D) for students The evaluation of dormitory design: C, D is the junior college group competitionEdit this paragraph competition significance1, cultivate innovative consciousness and creative ability of rapid access to information and data of 2, 3, exercise training to quickly understand and master new knowledge and skills training 4, teamwork and team spirit 5, enhance writing skills and typesetting technology of 6, won the National Award for Paul sent 7 graduate students, won the international level the reward is beneficial to apply for studying abroad 8, more important is the training oflogical thinking and open way of thinkingThe social application of editing the mathematical modeling contestThe application of mathematical modeling is a great impetusand impetus for the contest of mathematical modeling. At present, the first domestic mathematical modeling company - Beijing Noah Mathematical Modeling Technology Co., Ltd. was established in Beijing. Wei Yongsheng, a doctoral student, worked with two other like-minded students in the field of entrepreneurial modeling, from the domain of mathematical modeling that they were familiar with. Wei Yongsheng three people set up a mathematical modeling contest team in April 2003, then won the two prize of state, in 2005 won thefirst prize in the international contest of mathematical modeling, the same year in October registered the mathematical modeling in mathematical modeling enthusiasts website, to society, to the direction of the application, they formally established in June last year to the application mathematical modeling for entrepreneurial direction, the formation of entrepreneurial team, opened the road of entrepreneurship. Earlier this month, Beijing's mathematical modeling technology limited company officially registered, Wei Yongsheng entrepreneurial team officially on track. At present, Noah mathematical modeling is its specialization from the perspective of business to expand its strength, mathematical modeling and mathematical model and actively involved in the railway transportation, highway transportation, logistics management and other related solutions and consulting services. Wei Yongsheng explained to reporters, maybe a lot of people do not understand what is the use of mathematical modeling, he cited an example of a train station, to calculate how long a car can not only ensure the passengers were taken away, and to the greatest degree of cost savings, the mathematical model can be calculated by the optimal scheme.Wei Yongsheng said that their mathematical modeling team has been 6 years of history, with each other, very tacit understanding, but also made dozens of large and small projects. Their business philosophy is to provide a hitherto unknown mathematical modeling and mathematical model of optimal solutions for the direct and potential customers, minimize production cost, realize investment income for the customers. More Atlas。
AMESim Proportional Reversing Valve模型与仿真分析说明书

The Modeling and Simulation of Proportional Reversing Valve Basedon AMESimLin Chuang 1, a , Fei Ye 2,b1-2 School of Mechanical Engineering, Shenyang Jianzhu University, No.9, Hunnan East Road,Hunnan New District, Shenyang City, Liaoning, P.R. China, 110168a *********************,b ***************Keywords: AMESim ;Proportional Reversing Valve ;Modeling and SimulationAbstract . In some models of proportional reversing valve as an example, by Ansoft software andAMESim software respectively establishes the finite element analysis model of proportional solenoidand the proportional reversing valve with simulation model, the output characteristic parameterswhich are obtained by Ansoft software import AMESim proportional solenoid model, settingsimulation parameters, comparing theoretical characteristic curve and the sample parameter, todetermine the proportional solenoid model is correct.By analyzing the proportional reversing valvemodel simulation of the proceeds of the pilot valve to control pressure curve and the main valve coredisplacement curve, known pilot valve for the main valve has good controllability, proportionalreversing valve model to meet the corresponding functional requirement, for it can be used in liftinghydraulic circuit simulation model provides an important reference.1 IntroductionAt present, it is an important means of analysis of the hydraulic system operating characteristicswith the help of AMESim simulation, when the software simulates the truck crane hoisting circuitcontaining the proportional reversing valve,it need the help of HCD function to model the simulationof the proportional reversing valve[1]. Single using HCD to set up the simulation model of theproportional reversing valve,it usually simplifys the proportional electromagnet,uses piecewisefunction simulation of its drive on valve core according to the sample provided parameters,and ishard to ensure the simulation accuracy.The author attempts to use the finite element analysis softwareAnsoft Maxwell to model the proportional electromagnet, through the simulation input/outputcharacteristic of proportional electromagnet, as a proportional directional valve AMESim simulationmodeling of the input signal,to ensure the accuracy of hydraulic system simulation containingproportional control valve.Fig.1 Pilot proportional direction valve structure diagramThis paper is based on the structure and working principle of proportional directional valve, usesAMESim software for modeling and simulation, analysis of the simulation of pilot valve to controlInternational Conference on Automation, Mechanical Control and Computational Engineering (AMCCE 2015)pressure curve and the main valve core displacement curve, knowing pilot valve for the main valve has good controllability,proportional directional valve model meeting the corresponding functional requirement, is an important reference for it can be used in lifting hydraulic circuit simulation model provides.2 The working principle of the proportional directional valveFig.1 is the structure diagram of the guide type proportional directional valve, this valve is mainly consisting of two parts, proportion of pilot valve and main valve ,the pilot valve's internal structure includes integrated proportional amplifier, proportional electromagnet and the centring spring, etc.Proportional amplifier amplifys the power of the command signal,inputs proportional current to the proportional electromagnet, proportional electromagnetic outputs electromagnetic force and promotes the forerunner in proportion valve core, at this point, generating a control pressure at the outlet of the pilot valve,it pressd on the one end of both sides of the main valve core, under the action of the pressure,main valve core gradually overcomes the force of the reset spring and begins to move, and forming a valve mouth opening, and the oil flow rate can be changed proportionally and the flow direction can be changed,so to realize the control of the position and speed of the actuator.3 The proportional electromagnet modeling and simulationIn order to study the dynamic output characteristics of proportional electromagnet working alone,it is built in the AMESim simulation model as shown in Fig.2, the main part of its proportional electromagnetic valve is composed of signal input, and the quality of block and the reset spring, the quality of block M is according to the proportional electromagnet armature putting total quality to set, and design of the friction coefficient and reset spring pre-tightening force and stiffness reasonably.Fig.2 Proportional electromagnet AMESim simulation model3.1 AMESim proportional electromagnetic valve is created in the output fileProportional electromagnet GH263-060 as sample, the rated current of 1.11[A] and rated travel 4[mm], suction 145[N] [2], proportional electromagnetic valve is built by using Ansoft software model, when the input rated current is 1.11[A], steady-state output proportional electromagnet force changes between 137 ~ 161[N], the mean value of 148.4[N], 145[N] sample value and the error is only 2.3%, the model correctly reflects the proportional electromagnet output characteristic[3].Proportional electromagnetic valve is set up in the AMESim simulation model, need the electromagnetic force and inductance output characteristics as the data support, through AMESim table edit module will Ansoft Maxwell 2D analysis of the proceeds of the proportional electromagnet electromagnetic force and inductance related data, in the form of a 2D table in AMESim are stored for Diancitie. The data and Dianganxin data format file, so that the proportional electromagnet simulation parameters when imported.3.2 The simulation parameters settingselectromagnet coil inside an electrical current, electromagnetic loop formation on the armature make its output electromagnetic force, after reaching reset spring pre-tightening force, under the impetus of the armature push-rod spring began to shrink.In AMESim environment parameter settings, set parameters for the model on the basis of the above conditions, the main parameter such as Table 1.3.3 Run the simulationAfter setting simulation parameters, operation simulation, get proportional electromagnet simulation results are as follows:(1) The input voltage and current curvesCan be seen from the Fig.3, the input voltage coil is the input voltage proportional solenoid, that is, between 0 and 1 seconds, a linear growth trend, the voltage change range is 0 ~13[V].At this point, as the input voltage, current also increases gradually, in the 1[s] current peak of 1.104[A].The numerical samples with proportional electromagnet rated current numerical 1.11[A] very close.Fig.3 Input voltage and current curve over time(2) The armature current push rod - force change curvesFig.4 Putting armature current - force characteristic curve Fig.5 Theoretical curve Current - power output characteristics of proportional electromagnetic valve is an important index of evaluating its control performance, can be seen in Fig.4 armature putter output force changing with the current, before 0.58[A], electromagnetic force approximation to grow by a certain slope, in 0.58 [A] place, putting electromagnetism appeared inflection point, 0.58[A] and 0.93[A] stage, and electromagnetic force in another slope increase slowly, in 1.1[A] output reach maximum electromagnetic force 144.932[N].Electromagnetic force in the middle stage of slow increase of the reason is that when the armature inductance increases after putting a displacement, the obstacles of thrust increases have played a role, with the increase of current, push rod after a certain stage in electromagnetic force increases rapidly, in the end when the current is 1.1[A], putting the output force is 144.932[N], the sample value and the proportional electromagnet suction numerical rating 145[N] almost unanimously. Armature putter output force rapid rise, slow increase, rapid rise in three stages, and the current proportional electromagnetic valve is shown in Fig.5 - theory of power output characteristic curve, in contrast, the trend and numerical difference is not big, in the range of allowable error.Appear afore-mentioned difference possible factors is: in the process of proportional electromagnet modeling and simulation, to the simplified model, the parameters of the individual module default assumptions, will also introduce a small error[4].Simulation results in view of the above analysis, the proportional solenoid current - force characteristic curve is close to the theoretical analysis, the curves in its value and sample parameter is very close, so after the proportional electromagnet model can be applied to the study.4 The proportional directional valve with the modeling and simulationAs shown in ing AMESim software model pilot proportional directional valve.Fig.6 Pilot proportional directional valve with the simulation model4.1 The simulation parameters settingsPilot valve as the premise of proportional directional valve, the manual input signals accurately convert proportional electromagnet force output signal, and then passed to the control valve core, with the help of drive valve core movement to achieve the goal of controlling the oil is loaded into the main valve core on each control cavity.As drive carrier output proportional electromagnetic valve isthe whole process, the electromagnetic force, putting through the armature effect on pilot valve core, when the output of the electromagnetic force is greater than the reset spring pre-tightening force, valve core began to move and generate the opening of valve port, control the oil into the left side spring cavity of main valve core, when pressure is enough to overcome the right after the spring pre-tightening force and the valve core friction, the main valve core movement to the right, at the same time in the main valve spool valve mouth opening, realize the main valve reversing throttling.In AMESim environment parameter settings, according to the proportional electromagnet simulation model and guiding the operation condition of the proportional directional valve set parameters for the model, main parameter such as Table 2.Table 2 Setting the main parameter of Pilot proportional directional valve Control pressure Constant Source 30[bar]Directional valvespool Piston diameter 15[mm],Rod diameter 2[mm],The rest take a defaultvalueThe main valvemass Mass 0.02[kg],Coefficient of viscous friction 15[ N/(m/s)],Higher displacement limit 15.2[mm],The rest take a default valueThe main valvespring cavityPre-tightening force 15[N],Spring rate 10000[N/m] Traffic sources Constant flow rate 2[L/min]Set the solver Simulation time 1[s],Time interval 0.001[s]4.2 Run the simulationRun the simulation, the curve can be obtained as follows:Fig.7 Pilot valve to control pressure curveFig.7 is pilot valve to control pressure output curve.Pilot valve control output by the pressure on both sides of the main valve core, under the action of the control pressure, the valve core gradually overcome the role of the reset spring and fluid dynamics, and finally formed the movement of the main valve core, forming a valve mouth opening, the main valve to realize reversing the throttle.By figure, output pressure is 0[bar] before 0.13[s], 0.13[s] control pressure output delay, between 0.13[s] to 0.7[s] time, control the pressure gradually increased, until 0.7[s], the output value of the maximum 30[bar].Fig.8 Main valve core displacement curveThe Fig.8 shows that the main valve core displacement curve and pilot control pressure curvetrend is consistent, the main valve core did not produce displacement before 0.13[s], 0.13[s] to 0.7 [s]in the main valve core control pressure, the maximum displacement of the 15.2[mm], curve reflectsthe pilot valve for the main valve with good controllability[5,6].5 SummaryIn AMESim environment, the proportional electromagnet about the working current and the clearance between the output force and the inductance data respectively by 2D table format is converted to the corresponding format file, proportional electromagnetic valve is set up in the AMESim simulation model of the 2D table data import magnet linear converter, the simulation analysis of the dynamic output characteristics in AMESim software, the result of the proceeds of thecurrent - force curve and theoretical curve contrast, verify the validity of the model, for furtherin-depth theoretical research to provide adequate basis.Set in AMESim model based on proportional electromagnet HCD, pilot proportional directional valve with HCD model, through the analysis of the simulation of the pilot valve to control pressure curve and the main valve core displacement curve,can be the guide valve for the main valve has good controllability, can be used as a directional controlvalve is used for lifting hydraulic circuit simulation model.References[1] BideauxE, SeavardaS. Pneumatic library for AMESim. Fluid Power system and technology,(1998),p.185-195.[2] GH263-060 proportional electromagnet samples. /.[3] Roccatelloa, Mancos, Nervegnan. Modeling a variable displacement axial piston pump in amultibody simulation environment [C]. American Society of Mechanical Engineers(ASME), Torino,(2006),p.456-468.[4] Wong, JY. Theory of Ground Vehicles[M].John Wiley&Sons,New York,(2001),p.169-174.[5] Stringer, John. Hydraulic system analysis [J].The Macmillan Pr.Ltd ,1976.[6] Ying Sun, Ping He,Yun qing Zhang, Li ping Chen. Modeling and Co-simulation of HydraulicPower Steering System[C]. 2011 Third International Conference on Measuring Technology andMechatronics Automation. 2011 IEEE:p.595-600.。
控制类外文期刊SCI-EI比较好投的有哪些
控制类外文期刊SCI,EI比较好投的有哪些作者: yanwei123456 发布日期: 2007-12-05控制类的SCI的都很难发,除非内容很好!如果不错就试试SIAM Journal on Control and Optimization.作者: mqlong 发布日期: 2007-12-05你研究具体哪方面?可以交流一下。
作者: Hongtan 发布日期: 2007-12-05International Journal of systems science, Internatioanl Journal of control, 应该要好中一点,atuomatica,IEEE AC, systems and control letters一般比较难中作者: ertuo104 发布日期: 2007-12-05ddfdd作者: qpl001 发布日期: 2007-12-05我现在主要做智能控制,研究随机梯度及投影算法有一段时间,研究了一种他们的快速收敛的方法,想发到国外的期刊上,速度快一点的作者: yanwei123456 发布日期: 2007-12-05建议找计算数学类的,applied numerical mathematics, Journal of computational and applied mathematics, applied mathematics and computation等等!不过现在数学类(包括控制类的)没有很快的,一般都得小半年才有审稿意见!系统与控制类投稿期刊整理AI MagazineAmerican Association for Artificial Intelligence (AAAI) PublicationsApplied Mathematical ModellingApplied Mathematics and ComputationArtificial IntelligenceArtificial Intelligence in EngineeringAutomatic control and computer sciences. 0146-4116Automatica. 0005-1098Automation and control. 0110-6295Automation and remote control. 0005-1179Chemical Design Automation NewsComputational Mathematics and Mathematical Physics Computational Statistics & Data AnalysisComputer Aided Geometric DesignComputer-Aided DesignComputers & Electrical EngineeringComputers & GraphicsComputers & Mathematics with Applications Computers in EngineeringComputers in IndustryControl ApplicationsControl Engineering PracticeControl, Optimisation and Calculus of Variations. Computing & control engineering journal.Control and instrumentation. 0010-8022Control engineering. 0010-8049Data & Knowledge EngineeringDecision Support SystemsDiscrete Applied MathematicsDiscrete MathematicsEcological ModellingEngineering Analysis with Boundary Elements Engineering Applications of Artificial Intelligence Expert Systems with ApplicationsElectronic Journal of Linear Algebra: Germany Electronic Journal of Linear Algebra: Israel Electronic Journal of Linear Algebra: Portugal Electronic Journal of Linear Algebra: USA Electronic Transactions On Numerical Analysis Future Generation Computer SystemsFuzzy Sets and SystemsIEE Computing & Control Engineering JournalIEE Proc. Control theory and applications 0143-7054 IEEE Control Systems MagazineIEEE Robotics and Automation MagazineIEEE Trans. Control Systems Technology. 1063-6536 IEEE SpectrumIEEE Transactions on Automatic ControlIEEE Transactions on Robotics and AutomationIFAC PublicationsImage and Vision ComputingIndustrial and Systems Control EngineeringInformation SystemsInstrumentation & control systemsInternational journal of adaptive control and signal processing. International journal of control.Information and Software TechnologyIntegration, the VLSI JournalInteracting with ComputersInternational journal of robotics & automation.International journal of systems automation, research & applications.Journal of Computational and Applied MathematicsJournal of Systems ArchitectureJournal of Systems and SoftwareJournal of Dynamic Systems, Measurement and ControlJournal of Dynamical and Control Systems:IsraelJournal of Dynamical and Control Systems:USAJournal of Mathematical Systems, Estimation, and ControlJournal of Process ControlJournal of Robotics and Autonomous systemsJournal of automation and information sciences.Knowledge-Based SystemsLinear Algebra and Its ApplicationsMathematics and Computers in SimulationMathematics and Computers in Simulation with Applied Numerical Math. Microprocessors and MicrosystemsMathematics of Control, Signals, and Systems:Netherlands Mathematics of Control, Signals, and Systems:USAMechatronicsModeling, Identification, and ControlNeural NetworksNeurocomputingParallel ComputingPattern RecognitionPattern Recognition LettersPerformance EvaluationRobotics and Autonomous SystemsSIAM Journal on Control and OptimizationSimulation Practice and TheorySystems and Control LettersTransactions of ASME. J. dynamic systems, measurement & control.SCI、EI收录的自动控制类期刊。
Circuital and Numerical Modeling of Electrostatic Discharge Generators
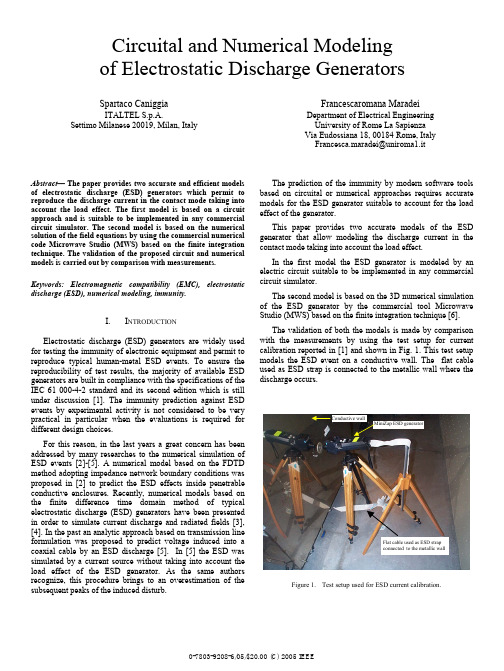
Circuital and Numerical Modeling of Electrostatic Discharge GeneratorsSpartaco CaniggiaITALTEL S.p.A.Settimo Milanese 20019, Milan, ItalyFrancescaromana Maradei Department of Electrical Engineering University of Rome La Sapienza Via Eudossiana 18, 00184 Rome, Italy Francesca.maradei@uniroma1.itAbstract— The paper provides two accurate and efficient models of electrostatic discharge (ESD) generators which permit to reproduce the discharge current in the contact mode taking into account the load effect. The first model is based on a circuit approach and is suitable to be implemented in any commercial circuit simulator. The second model is based on the numerical solution of the field equations by using the commercial numerical code Microwave Studio (MWS) based on the finite integration technique. The validation of the proposed circuit and numerical models is carried out by comparison with measurements. Keywords: Electromagnetic compatibility (EMC), electrostatic discharge (ESD), numerical modeling, immunity.I.I NTRODUCTIONElectrostatic discharge (ESD) generators are widely used for testing the immunity of electronic equipment and permit to reproduce typical human-metal ESD events. To ensure the reproducibility of test results, the majority of available ESD generators are built in compliance with the specifications of the IEC 61 000-4-2 standard and its second edition which is still under discussion [1]. The immunity prediction against ESD events by experimental activity is not considered to be very practical in particular when the evaluations is required for different design choices.For this reason, in the last years a great concern has been addressed by many researches to the numerical simulation of ESD events [2]-[5]. A numerical model based on the FDTD method adopting impedance network boundary conditions was proposed in [2] to predict the ESD effects inside penetrable conductive enclosures. Recently, numerical models based on the finite difference time domain method of typical electrostatic discharge (ESD) generators have been presented in order to simulate current discharge and radiated fields [3], [4]. In the past an analytic approach based on transmission line formulation was proposed to predict voltage induced into a coaxial cable by an ESD discharge [5]. In [5] the ESD was simulated by a current source without taking into account the load effect of the ESD generator. As the same authors recognize, this procedure brings to an overestimation of the subsequent peaks of the induced disturb.The prediction of the immunity by modern software tools based on circuital or numerical approaches requires accurate models for the ESD generator suitable to account for the load effect of the generator.This paper provides two accurate models of the ESD generator that allow modeling the discharge current in the contact mode taking into account the load effect.In the first model the ESD generator is modeled by an electric circuit suitable to be implemented in any commercial circuit simulator.The second model is based on the 3D numerical simulation of the ESD generator by the commercial tool Microwave Studio (MWS) based on the finite integration technique [6].The validation of both the models is made by comparison with the measurements by using the test setup for current calibration reported in [1] and shown in Fig. 1. This test setup models the ESD event on a conductive wall. The flat cable used as ESD strap is connected to the metallic wall where the discharge occurs.Flat cable used as ESD strapconnected to the metallic wallConductive wallMiniZap ESD generatorFigure 1. Test setup used for ESD current calibration.0-7803-9208-6/05/$20.00 (C) 2005 IEEESwitch forchargingSwitch for dischargingI Switch for charging I ESD tipI ESD strapESD gun - boxSwitch fordischargingFigure 2. Spice equivalent circuit of a typical ESD generator.II.M ODEL OF ESD G ENERATORA. Equivalent Circuit ModelThe purpose of an ESD generator is to reproduce typicalhuman-metal ESD. Considering this, a suitable circuital equivalent model could be the one shown in Fig. 2. This circuit model can be easily implemented in any SPICE based circuit simulator [7]. The lumped circuital elements are chosen as typical values that simulate the body and the arm effects of the person that causes ESD. In the circuit model of Fig. 2 there are two switches: the first one (on the left side) is used to charge the 150 pF capacitor at the typical voltage of 5 kV; the second switch (on the right side) provides the discharge. The flat cable used as ESD strap connected to the ground is modeled by the series connection of the lossless transmission line characterized by characteristic impedance 225 Ω and propagation time 3.3 ns, and a 10 nH inductance which models the wire used to connect the flat cable with the metallic wall. The 15 pF capacitance models the capacitive coupling between the ESD gun and the metallic wall (see the experimental setup shown in Fig.1). The ESD tip is modeled by the series of a 25 Ω resistance with the 0.2 µH inductance. It should be noted that the load represents the impedance of the metallic wall, and in the considered simulation is given by a 2 Ω resistance.B. Full-Wave ModelThe ESD generator is modeled by using the commercialnumerical code Microwave Studio (MWS) based on finite integration technique [6]. The model, shown in Fig. 3, contains dielectric parts, metallic parts and lumped circuital elements which permit to reproduce the physical form of a typical ESD generator and the reference discharge current proposed by IEC 77b [1], [3].Dielectric Strap ESD gun Metallic wallDielectricStrapESD gunMetallic wallFigure 3. The ESD simulator modeled in MWS.The geometrical configuration of the ESD generator adopted for the numerical simulation is similar to that of the MiniZap gun. Details on the material properties used to model the different part of the ESD gun are shown in Fig. 4. The lumped circuit elements adopted in the MWS model are shown in Fig. 5. The model is excited at Port 2 (see Fig. 5) by an ideal current source with 25Ω assuming a step rise-time of 1ns to reproduce the actual slow charging, switching and rapid discharge process of an ESD generator.(a)(b)Figure 4. Material details of the ESD simulator model in MWS: perfectelectric conductive (a) and lossy dielectric (b) regions.RL Parallel: R=2 ΩL=1nHPort 2RC Serial: R=50 ΩC=150 pFRC Serial: R=100 ΩC=10 pF RC Parallel: R=330 ΩC=2 pFFigure 5. Lumped element network and port excitation used to reproduce the physical form of a typical ESD generator and the reference discharge currentproposedIII. V ALIDATION OF THE ESD G ENERATOR M ODELS To validate the proposed models, current on the tip and strap of a commercial ESD generator called MiniZap where measured by using the setup for current calibration reported in [1] and shown in Fig. 1. The wall is a side of a shielded enclosure in which a target is mounted to measure currents by an oscilloscope within the enclosure. This configuration permits to avoid the coupling between the ESD event and the instrumentation. All the measurements were carried out at charging voltage of the ESD generator of 5 KV. The experimental setup has been arranged in the shielded room of Italtel S.p.A.The tip and strap current obtained by the two proposed models are shown in Figs 6-7. The comparison between the simulation results and the measurements reveals a very good accuracy. Moreover, the following considerations can be done:0 40 80 120 160 20051015202518283812.250A mp ere18 28 3812.5250C u r r e n t (A )Time (ns)Figure 6. Tip current: measured (solid line); Standard IEC (dot line); SPICE (dashed line); MWS (dashed-dot line).50 100 012.525A mp ereC u r r e n t (A )Time (ns)Figure 7. Strap current: measured (solid line); SPICE (dashed line); MWS (dashed-dot line).• The first fast rise time (less than 1ns) is reproduced and match well with the reference IEC current.•The measured and simulated waveforms after the first peak follow quite well with slight oscillations the reference IEC current. This is mainly due to the length and orientation of the strap.•The current on the strap has slower rise time than the current on the tip. This is due to the capacitance between the ESD generator and the environment (the metallic wall in this case, see the 15pF of Fig.2) that permits an alternative path for the first peak of the ESD current.In order to verify the generality of the developed models in terms of reproducibility of test results even using different ESD gun, the tip current has been measured several time by using the MiniZap gun (Fig. 8a), and by using the DITO gun (Fig. 8b). The measured tip currents shown in Fig.9 show that there is very little difference between two measurements performed with MiniZap gun and with that obtained using DITO gun.(a)(b)Figure 8. ESD generators: MiniZap (a) and DITO (b) guns.5010012.525A mp ere Time (ns)C u r r e n t (A )Figure 9. Measured tip current: MiniZap (solid line); MiniZap 2 (dot line); Dito (dashed line).IV.C ONCLUSIONCircuit and numerical models of the ESD generator have been proposed and discussed. The circuit model is suitable to be implemented in any commercial circuit simulator such as SPICE. The numerical model is based on the 3D simulation by the commercial tool MWS based on the finite integration technique. Both the models allow the accurate simulation of the discharge current in the contact mode taking into account the load effect. The comparison of the simulation results with measurements have revealed a very good accuracy.The proposed models are of great interest since they represent an important item in the development of software tools suitable for the prediction of ESD immunity, especially during the design stage.A CKNOWLEDGMENTThe research has been financially supported by Italtel S.p.A.R EFERENCES[1]77B/378/CDV, “IEC 61000-4-2: EMC-Part 4-2: testing andmeasurement techniques- ESD immunity test”, 2003-04-11.[2] F. Maradei, M. Raugi, “Analysis of upset and failures due to ESD by theFDTD-INBCs method”, IEEE Trans. Industry Applications, vol. 38, no.4, Jul./Aug.2002, pp.1009-1017, James Melcher Price Paper Award. [3]Kai Wang, D. Pommerenke, R. Chundru, T. Van Doren, J. Drewniak, A.Shashindranath, “Numerical Modeling of Electrostatic Discharge Generators“, IEEE Trans. on EMC, vol.45, no.2, May 2003.[4]S. Caniggia, F. Centola, D. Pommerenke, Kai Wang, T. Van Doren,“ESD Excitation Model for Susceptibility Study”, IEEE EMC Symp., Boston, 18-22 Aug. 2003.[5]G. Cerri, R. De Leo, V. Mariani Primiani, “ESD Indirect CouplingModeling“, IEEE Trans. on EMC, vol.38, no.3, August 1996.[6]Microwave Studio, Computer Simulation Technology (CST),www.cst.de[7]Spectrum Software, 1021 S. Wolfe Road Sunnyvale, CA 94086,。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. Introduction The scarcity of available energy resources has been further aggravated by the ever-increasing of the world energy demand. In addition, current energy production from coal and oil is damaging to the environment and nonrenewable. Therefore, it is urgent to develop the technologies utilizing renewable and clean energy sources to solve these problems. A solar chimney power plant offers interesting opportunities to use pollution free resources of energy. Solar chimney power technology, designed to produce electric power on a large-scale, utilizes solar energy to produce ventilation that drives wind turbines to produce electric power. The solar chimney concept was originally proposed by Professor Schlaich of Stuttgart in the late 1970s. Less than
Roozbeh Sangi ⇑, Majid Amidpour, Behzad Hosseinizadeh
Department of Mechanical Engineering, K.N. Toosi University of Technology (KNTU), Tehran, Iran Received 20 March 2010; received in revised form 1 January 2011; accepted 26 January 2011 Available online 24 February 2011 Communicated by: Associate Editor S.A. Sherif
⇑ Corresponding author.
E-mail address: roozehsangi@ (R. Sangi). 0038-092X/$ - see front matter Ó 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.solener.2011.01.011
4 years after he presented his ideas at a conference, construction on a pilot plant began in Manzanares, Spain, as a result of a joint venture between the German government and a Spanish utility. A 36-kW pilot plant was built, which produced electricity for 7 years, thus proving the efficiency and reliability of this novel technology. The chimney tower was 194.6 m high, and the collector had a radius of 122 m. Fundamental investigations for the Spanish system were reported by Haaf et al. (1983) in which a brief discussion of the energy balance, design criteria, and cost analysis was presented. Krisst (1983) demonstrated a ‘back yard type’ device with a power output of 10 W in West Hartford, Connecticut, USA. In a later study, Haaf (1984) reported preliminary test results of the plant built in Spain. Kulunk (1985) produced a micro scale electric power plant of 0.14 W in Izmit, Turkey. Sampayo (1986) suggested the use of a multi-cone diffuser on the top of the chimney to allow the operation as a high-speed chimney and to act
Subscripts a ambient c collector ch chimney e earth f fluid F friction i inner o outer T turbine
as a draft tube for any natural wind blowing. Mullet (1987) presented an analysis to derive the overall efficiency of the solar chimney. The governing differential equations were developed by Padki and Sherif (1988) to describe the chimney performance. In later studies, Padki and Sherif (1989a,b) conducted an investigation of the viability of solar chimneys for medium-to-large scale power production and power generation in rural areas. Schlaich et al. (1990) studied the transferability from the experimental data of the prototype in Manzanares to large power plants (5, 30 and 100 MW). Yan et al. (1991) reported on a more comprehensive analytical model in which practical correlations were used to derive equations for the air flow rate, air velocity, power output and thermofluid efficiency. Padki and Sherif (1992) briefly discussed the effects of the geometrical and operating parameters on the chimney performance. Kreetz (1997) presented a numerical model for the use of water storage in the collector. His calculations showed the possibility of a continuous day and night operation of the solar chimney. Pasumarthi and Sherif (1998a,b) conducted experimental and theoretical analyses on a solar chimney model built on a university campus. Padki and Sherif (1999) developed a simple model to analyze the performance of the solar chimney. Bernardes et al. (1999) presented a theoretical analysis of a solar chimney operating on natural laminar convection in the steady state. Lodhi (1999) presented a comprehensive analysis of the chimney effect, power production and efficiency and estimated the cost of the solar chimney power plant set up in developing nations. Gannon and Backstrom (2000a,b) developed an analysis of the solar chimney including chimney friction, exit kinetic losses and a simple model of the solar collector. More thorough analyses of
830