深海工程装备研发中若干共性水动力学问题
新型系泊系统的设计方法及其水动力性能分析

新型系泊系统的设计方法及其水动力性能分析一、概述随着海洋资源的日益开发和利用,系泊系统在海洋工程中的应用越来越广泛,其设计优化及性能分析成为海洋工程领域的重要研究内容。
新型系泊系统的设计及其水动力性能分析,对于保障海洋平台、船舶等海洋结构物的安全、稳定与高效运行至关重要。
传统的系泊系统设计往往基于经验公式和简化的力学模型,难以准确反映实际复杂环境下的水动力特性。
随着计算流体力学、结构动力学等学科的快速发展,以及高性能计算机和数值模拟技术的广泛应用,新型系泊系统的设计方法正在向精细化、智能化和集成化方向发展。
本文旨在探讨新型系泊系统的设计方法及其水动力性能分析。
将介绍系泊系统的基本类型和结构特点,以及其在海洋工程中的应用场景。
重点阐述新型系泊系统的设计原则、关键技术和创新点,包括材料选择、结构设计、优化算法等方面。
通过数值模拟和实验研究,分析新型系泊系统在不同海况下的水动力性能,评估其稳定性和可靠性,为实际工程应用提供理论支撑和技术指导。
1. 新型系泊系统的重要性和应用背景随着海洋工程和船舶工业的飞速发展,新型系泊系统在海上工程结构物,特别是风力发电、海洋石油开采、海上货物运输等领域的应用越来越广泛。
系泊系统的主要功能是为海上设施提供安全、稳定的定位,确保其在各种环境条件下都能正常工作。
传统的系泊系统虽然在过去几十年中得到了广泛应用,但在面对极端海洋环境,如大风、大浪、海流和潮汐等复杂因素时,其性能往往受到挑战。
研究和开发新型系泊系统,提高其在极端环境下的性能,对于保障海上设施的安全、提高经济效益、促进海洋工程的持续发展具有重要意义。
新型系泊系统的研究不仅涉及结构设计、材料选择、制造工艺等多个方面,更重要的是要对其水动力性能进行深入分析。
水动力性能是指系泊系统在海洋环境中的受力、变形、振动等特性,它直接决定了系泊系统的稳定性和安全性。
通过对新型系泊系统的水动力性能进行分析,可以预测其在不同海洋环境下的表现,为系统设计和优化提供理论依据。
海洋工程装备在海洋科研和探索中的应用研究

海洋工程装备在海洋科研和探索中的应用研究引言:海洋是地球上最大的生态系统之一,也是人类极少数尚未完全探索的领域之一。
为了更好地理解和保护海洋生态系统,以及开发其资源,海洋科研和探索变得尤为重要。
而海洋工程装备在海洋科研和探索过程中发挥着重要作用。
本文将探讨海洋工程装备在海洋科研和探索中的应用研究,并讨论其对海洋科学和社会发展的影响。
一、海洋工程装备的概述海洋工程装备是指在海洋环境中运用的各种机械设备、仪器仪表、船舶和工程建筑物等。
它们广泛应用于海洋资源开发、海底勘探、海上运输、海洋工程建设等领域。
海洋工程装备的发展与海洋科研和探索密切相关,不仅可以提高工作效率,还可以降低工作风险。
二、海洋科研中的应用1. 海洋勘测装备的应用海洋勘测装备是海洋科学家们进行海洋测量和探测的重要工具。
其中包括声学测距仪、温度和盐度测量设备、氧气测定设备、浮标和航标等。
这些设备能够提供详细的海洋底质信息、水文学数据和海洋地貌图像,为海洋科学家们提供数据支持和参考。
2. 深海探测装备的应用深海是地球上最神秘的地方之一,也是海洋科学家们迫切想要了解的领域。
深海探测装备能够帮助科学家们深入了解深海生态系统、地质构造和资源分布。
例如,潜水器、遥控水下机器人和声纳探测器等设备能够帮助科学家们进行深海地理的探测和观测,获取更多关于深海生物、岩石和矿物的信息。
三、海洋探索中的应用1. 海洋资源开发装备的应用海洋资源包括石油、天然气、矿产资源等,对于社会和经济的发展至关重要。
海洋工程装备在海洋资源开发中发挥着重要作用。
石油钻井平台和海底抽油设备等装备使得深海石油资源的开发成为可能。
同时,海洋工程装备也被广泛应用于海底矿产资源的开采和海上风电场的建设。
2. 海洋环境保护装备的应用随着人类对海洋资源的开发和利用,海洋环境保护变得尤为重要。
海洋工程装备在海洋环境保护方面也发挥着至关重要的作用。
例如,油污清除装备和海底垃圾回收装备帮助保护海洋生态系统免受污染。
深海作业型ROV水动力试验及运动控制技术研究

深海作业型ROV水动力试验及运动控制技术研究一、本文概述本文旨在深入探讨深海作业型ROV(遥控无人潜水器)的水动力试验及其运动控制技术的相关研究。
随着海洋资源的日益重要和深海探索的逐步深入,ROV作为深海作业的重要工具,其性能的优化和运动控制的精确性对深海探测、海底资源开发和海洋环境保护等领域具有重大意义。
本文将首先概述ROV的基本原理和分类,重点介绍深海作业型ROV的特点和应用领域。
随后,本文将详细分析ROV水动力试验的重要性,探讨如何通过水动力试验来优化ROV的设计,提高其性能。
在此基础上,本文将深入研究ROV的运动控制技术,包括路径规划、姿态控制、避障等关键技术,并探讨如何提高ROV在复杂海洋环境下的自主作业能力。
本文还将总结现有的ROV水动力试验和运动控制技术的研究进展,分析当前存在的问题和挑战,并在此基础上提出新的研究思路和方法。
通过本文的研究,旨在为深海作业型ROV的设计和优化提供理论支持和实践指导,推动ROV技术在深海作业领域的广泛应用和发展。
二、水动力试验技术水动力试验技术是评估深海作业型ROV性能的关键环节,涉及到ROV在各种海洋环境下的稳定性和操控性。
ROV的水动力特性,包括其阻力、升力、侧力和力矩等,直接决定了其在深海作业中的表现。
通过水动力试验,我们可以深入了解ROV的动态行为,优化其设计,提高其在复杂海洋环境中的作业效率。
水动力试验主要包括模型试验和实船试验。
模型试验是在特定的水池或水槽中进行的,可以模拟不同海洋环境,如流速、流向、波浪等,对ROV模型进行动态测试。
这种方法具有成本低、周期短、可重复性强等优点,是ROV水动力性能研究的重要手段。
由于模型试验的缩尺效应和相似性准则的限制,其结果往往不能完全反映实船在实际海洋环境中的性能。
实船试验则是在真实的海洋环境中进行的,可以直接获取ROV在实际工作状态下的水动力性能数据。
虽然实船试验的成本高、周期长,且受到海洋环境的不确定性和安全性的限制,但其结果具有更高的可靠性和实用性。
海上风电场建设与海洋工程装备研发中若干水动力学关键技术问题

海上风电场建设与海洋工程装备研发中若干水动力学关键技术问题缪国平1,朱仁传1,程建生2,王景全2(1. 上海交通大学船舶海洋与建筑工程学院,上海 200030;2. 解放军理工大学工程兵工程学院,南京 210007)摘要:结合近年来在与海洋资源开发相关的水动力学方面开展的研究工作和对国内外研究进展的认识,以及海上风电设备研制和风电场的建设,就海洋工程装备研发中水动力学关键技术及其可能的发展方向作了简要的评述,以期引起有关方面对海洋工程装备研发中的关键技术研究的重视。
关键词:海上风电;海洋工程;水动力学中图分类号:U661.1 文献标识码:A 文章编号:1005-9962(2009) 01-0019-04Abstract: A brief state-of-the-art review is given on some key technological problems and their developing trends in hydrodynamics for the construction of offshore wind power plants and the developments of ocean engineering equipment, based on the survey on the recent research progress over the world and our own research activities in the specified field. The present review is aimed to arouse attentions to the research of the key technology in the research and development of the offshore engineering equipment.Key words: offshore wind power; ocean engineering; hydrodynamics1 落实科学发展观,提升海上风电场和海洋工程装备设计研发能力,推进我国海洋资源综合开发的全面发展当前,全球所消耗的油气中约有30%以上来自海底油田,未来人们对海洋油气资源的依赖程度越来越高。
深海采矿系统水动力技术研究综述
深海采矿系统水动力技术研究综述摘要:海洋资源丰富,是21世纪世界经济和科技发展的焦点,也是经济全球化的重要影响因素。
在国家层面,我国提出了“提高海洋资源开发能力,发展海洋经济,保护海洋生态环境,维护国家海洋权益,建设海洋强国”的发展目标。
海洋产业的快速发展为深海采矿的发展提供了基础。
在《中国制造2025》中,“海洋工程装备和高技术船舶”被列入十大重点发展领域,为深海采矿的发展奠定了良好的基础。
关键词:深海;采矿系统;研究进展;水动力技术;一、深海采矿技术难点1.海底矿区探测技术。
海底地形复杂,大部分的深海矿产资源位于海平面以下3000m至5000m的水深,且地质复杂,其岩性从软泥变化到脆性岩壳等。
需要探明海底的矿物富集情况,了解海底地形特征,对矿区的边界进行确定以明确整个矿区的范围,探测并确定海底的矿物丰度、矿泥比例等。
在此基础上对海底矿区的地形地质等环境特征进行建模,规划采矿实施的路径,实现深海的视景仿真技术与实时图像处理等技术。
2.海底采矿技术。
按照规划的采矿路径在海底的矿区表层行进,连续采集海底沉积的矿物,并对所采集的矿物进行一定的处理,包括矿物脱泥、矿物破碎等流程,处理完成后将矿物输运至扬矿系统。
海底采矿系统集机械、电气、液压、控制、材料等技术于一体,海底采矿车需要在深海的恶劣环境、复杂地形地质条件下作业,同时采矿车需要具备承载、作业处理、避障越障、防沉陷等功能。
3.矿物输运技术。
将深海采集的矿物提升输运至水面母船,其作业水深达数千米,如何从6000m甚至更深的海底将矿物提升至水面需要考虑水下高压、海流、温差、腐蚀以及海面影响等因素。
另一方面,从商业化采矿的工程实现的角度,矿物输运技术需要满足输运能力、输运效率、安全性、稳定性等要求。
针对商业化采矿的管道提升式方案,矿物由管道输运,基于海洋油气工程中的立管与软管技术,需要考虑管体的结构设计技术以及海洋环境下的涡激振动问题。
深海采矿系统的管道内的流体为矿物泥水的两相流,需要针对内部流动与外部海洋条件下的管道进行深入的设计、数值计算与试验模拟,形成适合深海采矿工程的矿物输运技术。
深海采矿1000米海试系统主要部件布放中的水动力学问题研究
深海采矿1000米海试系统主要部件布放中的水动力学问题研究深海采矿系统的布放是深海采矿作业顺利进行的基础,按照系统的动力学特性,布放过程可分为两个部分,第一部分为集矿机从采矿船上吊起到集矿机入水,在集矿机入水时将出现复杂的气-固-液三相耦合过程,集矿机底部将承受瞬间出现的巨大砰击载荷,这将会影响到布放机构的工作,在极端的海况下甚至导致布放的失败;第二部分是从集矿机完全浸没在海水中开始到集矿机到达海底,在这个布放过程中,受到波浪等海洋环境以及船舶的随波运动的影响,布放中的系统处于不稳定状态,浸没在水下的设备总质量将越来越大,巨大的质量在水中随着采矿船运动,可能导致采矿系统与采矿船连接部分承受很大的载荷。
因此,深海采矿系统的布放和水动力问题研究是我国深海采矿研究领域中非常重要但又涉及较少的内容,本文以中国深海采矿1000米海试系统为研究对象,采用计算流体力学方法对采矿系统在布放中的关键阶段的动力学和水动力特性进行了探索性研究。
本文的主要研究成果分为以下几个部分:1、在RANSE (Reynolds-Averaged Navier-Stokes Equations)基础上,采用Fluent软件构建了二维数值波浪水槽。
在数值水槽的左端采用摇臂法进行造波,而在水槽的右端则设置一段消波区域采用多孔介质法用来消散波浪,减少波浪的反射。
在数值方法上,选择有限体积法,并用VOF(Volume of fluid)法追踪二维自由液面的波动。
通过适当选择多孔介质特征参数,可以造出理想的规则线性波,二阶Stokes波以及基于海浪谱的随机波。
着重对多孔介质特征参数的选择进行了研究,得到不同波高下多孔介质参数选择的方法。
通过选择合适的仿真参数得到的波浪仿真结果与1000m海试布放回收作业海洋环境下的波浪十分吻合,为集矿机模型在波浪影响下入水的研究奠定基础。
2、对集矿机在垂直方向的静水砰击进行了仿真研究。
按照入水速度性质的不同,静水砰击分为匀速入水和自由落体入水两种情况。
海洋工程中多浮体系统的水动力研究综述
海洋工程中多浮体系统的水动力研究综述许鑫;杨建民;李欣;徐亮瑜【摘要】随着深海油气开发和海洋大型装备的发展,多浮体系统越来越多地被使用.这些系统在波浪中存在着较为复杂的水动力干扰现象,在某些局部波浪会发生放大或遮蔽,从而使得其浮体间相对运动和受力的预报变得十分困难,因此对该问题的研究变得十分必要.该文对目前海洋工程中较为常见的多浮体系统进行了介绍,并就国内外在多浮体系统的水动力方面的研究进行了系统的阐述,包括水动力干扰理论研究、数值模拟研究以及模型试验研究等方面,最后对该课题未来的研究方向提出建议.【期刊名称】《中国海洋平台》【年(卷),期】2014(029)004【总页数】9页(P1-8,13)【关键词】多浮体;水动力;相互作用【作者】许鑫;杨建民;李欣;徐亮瑜【作者单位】上海交通大学海洋工程国家重点实验室,上海200240;上海交通大学海洋工程国家重点实验室,上海200240;上海交通大学海洋工程国家重点实验室,上海200240;上海交通大学海洋工程国家重点实验室,上海200240【正文语种】中文【中图分类】P75近年来, 随着深海资源的开发和利用,以及海洋工程大型装备不断地更新和完善,涌现出大量的多浮体结构。
在这些多浮体系统中,存在两个或多个浮体,且它们之间的间距较小,从而使其周围水动力相互作用变得十分显著。
多浮体系统在波浪作用下,每个浮体对波浪的作用同时也会对其他浮体造成影响,某些局部波浪会发生放大或遮掩,浮体周围流体的运动变得十分复杂,尤其是浮体之间狭窄水道中流体发生共振时,非线性和粘性的作用非常明显,使得预报其浮体的相对运动和受到的流体作用力变得非常困难。
为了解决上述难题,需要对多浮体系统进行深入地探索,研究多浮体在波浪中的水动力相互作用,以及在其它联结机构或装备下的耦合作用,在此基础上可对作业过程进行准确预报,最终为实际施工作业提供指导。
目前海洋工程中常见的多浮体系统主要有:FPSO(浮式生产储卸油平台,Floating Production Storage and Offloading Units)与穿梭游轮的原油外输系统、FLNG(浮式液化天然气生产装置,Floating Liquefied Natural Gas)与LNG(液化天然气船)的外输系统、浮式平台浮托安装系统、多个起重船联合起吊作业系统、海上超大型浮体以及钻井平台与内置浮力罐耦合系统等。
水下机器人水动力特性研究

水下机器人水动力特性研究水下机器人是一种能够在水下执行特定任务的机器人。
随着科技的发展,水下机器人在海洋工程、水下勘探、海底资源开发等领域发挥了重要作用。
然而,水下机器人在水下运动过程中受到水的阻力和流动特性的影响,水动力特性的研究对于提高水下机器人的运动效能具有重要意义。
水动力学是研究流体运动规律的学科,主要涉及流体力学、运动学和动力学等方面的知识。
对于水下机器人而言,了解其水动力特性对于设计合理的机体结构、提高机器人的操控性能和运动效能有着重要意义。
下面将从流体力学、运动学和动力学三个方面来探讨水下机器人的水动力特性研究。
首先,流体力学是研究流体(包括气体和液体)静力学和动力学性质的学科。
在水下机器人的运动中,其表面与水流相互作用形成流体阻力,阻力的大小与机器人的形状、速度和水流的性质有关。
研究机器人与水流的流体力学特性可以帮助优化机器人的外形设计,减小阻力并提高机器人的运动效率。
此外,流体力学研究还可以为水下机器人的动力配置和推进系统设计提供理论指导。
其次,运动学是研究物体运动规律的学科,它涉及到位置、速度、加速度等物理量的描述和计算。
对于水下机器人而言,了解其运动学特性可以帮助我们更好地控制和规划机器人的运动路径。
通过运动学研究,可以确定机器人在水下的最佳运动轨迹和速度,从而优化机器人的操控性能和任务执行效率。
最后,动力学是研究物体运动的原因和规律的学科,它涉及到力、质量、加速度等物理量之间的关系。
研究水下机器人的动力学特性可以帮助我们了解机器人在水下的推进和操控方式,以及不同力的作用对机器人运动的影响。
了解机器人的动力学特性可以为改进机器人的动力配置和推进系统设计提供理论基础。
综上所述,水下机器人的水动力特性研究对于提高机器人的运动效能和操控性能具有重要意义。
通过流体力学、运动学和动力学的研究,可以优化机器人的外形设计、确定最佳运动轨迹和速度,改进机器人的动力配置和推进系统设计。
未来随着技术的进步,水下机器人的水动力特性研究将更加深入,为水下工程和科学研究提供更多的支持和帮助。
近海工程中水动力学研究进展探讨

《近海工程中水动力学研究进展探讨》授课老师:谭娅姓名: 魏兴龙学号:0830301060课程名称:《河口海岸水动力模拟》近海工程中水动力学研究进展探讨魏兴龙河海大学交通海洋学院0830301060摘要:水动力学是流体力学的一个重要分支,有着悠久的研究与发展历史,形成了比较完整的学科体系。
本文主要阐述水动力学在近海工程中的应用、现状及其发展趋势等,提出了近期在近海工程中水动力学的主要问题。
关键词:水动力学近海工程研究进展1. 水动力学发展与理论基础十八世纪初叶,经典水动力学有迅速的发展.欧拉、丹尼尔、伯努利是这一领域中杰出的先驱者。
十八世纪末和整个十九世纪,形成了两个相互独立的研究方向:一是运用数学分析的理论流体动力学;一是依靠实验的应用水力学。
开尔文、瑞利、斯托克斯、兰姆等人的工作使理论水平达到相当的高度,而谢才、达西、巴赞、弗朗西斯、曼宁等人则在应用水力学方面进行了大量的实验研究,提出了各种实用的经验公式。
十九世纪末,流体力学的发展扭转了研究工作中的经验主义倾向,这些发展是:雷诺理论及实验研究;雷诺的因次分析;弗劳德的船舶模型实验;空气动力学的迅速发展。
二十世纪初的重要突破是普朗特的边界层理论,它把无粘性理论和粘性理论在边界层概念的基础上联系起来。
二十世纪蓬勃发展的经济建设提出了越来越复杂的水力学问题:高浓度泥沙河流的治理;高水头水力发电的开发;输油干管的铺设;采油平台的建造;河流湖泊海港污染的防治等。
使水力学的研究方向不断发展,从定床水力学转向动床水力学;从单向流动到多相流动;从牛顿流体规律到非牛顿流体规律;从流速分布到温度和污染物浓度分布;从一般水流到产生渗气、气蚀,引起振动的高速水流。
以电子计算机应用为主要手段的计算水力学也得到了相应的发展。
水力学作为一门以实用为目的的学科将逐渐与流体力学合流。
2. 水动力研究在海洋工程上的应用海洋中蕴藏着全球70%的油气资源,在世界油气资源生产总量中,海洋油气资源产量比例与日俱增。
深海作业型ROV水动力试验及运动控制技术研究

结论
深海采矿系统水动力技术是实现深海矿产资源开采的关键技术之一,目前已 经取得了一定的研究成果。然而,仍存在诸多不足和挑战,例如设备的效率、稳 定性、智能化和环保等方面还有很大的提升空间。未来,需要进一步深入研究各 种水动力技术的原理和应用,发展新型的水动力技术和设备,以满足深海采矿的 需求,同时注重环保和可持续性发展。
5、深海极端环境适应性:针对深海极端环境,研究更具适应性的材料和技 术,提高ROV的可靠性和稳定性。
随着深海探测技术的不断发展,我们相信深海作业型ROV水动力试验及运动 控制技术将在未来发挥更加重要的作用,为人类深入了解和探索深海世界提供强 有力的支持。
参考内容
引言
随着人类对矿产资源的需求不断增加,深海采矿作为一种新型的矿产资源开 采方式,逐渐受到人们的。深海采矿具有广阔的发展前景,但同时也面临着诸多 技术挑战,其中水动力技术就是关键之一。本次演示将对深海采矿系统水动力技 术的现状和未来发展趋势进行综述。
结论与展望
深海作业型ROV水动力试验及运动控制技术是保障ROV在深海环境中可靠、高 效作业的关键。本次演示对这两项技术进行了全面探讨,总结了各自的发展历程 和实际应用情况。随着科技的不断进步,未来对这两项技术的研究将更加深入, 应用将更加广泛。
在未来的研究中,以下几个方面值得:
1、水动力性能优化:进一步深入研究ROV的水动力性能规律,探索更高效的 优化方法和策略,提高ROV的性能和作业效率;
3.大数据分析水动力技术
大数据分析在深海采矿中具有重要作用,可以提供全面的数据支持,帮助人 们更好地了解深海矿产资源的分布和开采状况。水动力技术是影响大数据分析的 重要因素之一,涉及到数据采集、传输和处理等方面。目前,大数据分析水动力 技术的研究主要集中在数据压缩、数据传输协议和数据处理算法等方面,以提高 数据采集、传输和处理的效率和质量。
海洋动力学理论对海洋工程的应用与分析

海洋动力学理论对海洋工程的应用与分析海洋动力学是研究海洋中水流、波浪、潮汐等运动规律的学科,它的理论与方法对于海洋工程的设计和施工具有重要意义。
本文将从海洋动力学理论的应用角度,分析其在海洋工程中的具体应用。
首先,海洋动力学理论在海洋工程中的应用主要涉及到海洋水流的研究。
海洋水流是海洋中最基本的运动形式,对于海洋工程的设计和施工具有重要影响。
通过海洋动力学理论的研究,可以了解海洋水流的速度、方向和变化规律,从而为海洋工程的定位和布局提供科学依据。
例如,在海洋风电场的设计中,需要考虑到海洋水流的影响,确定风机的布局和安装方式,以充分利用水流的动能。
此外,在海洋油气开发中,也需要考虑到海洋水流对于油气输送管道的影响,避免水流对管道造成冲刷和破坏。
其次,海洋动力学理论还可以应用于海洋工程中的波浪研究。
波浪是海洋中常见的自然现象,对于海洋工程的设计和施工具有重要影响。
通过海洋动力学理论的研究,可以了解波浪的高度、周期和传播规律,从而为海洋工程的抗波设计提供依据。
例如,在海洋桥梁的设计中,需要考虑到波浪对桥梁的冲击力和振动影响,确定桥梁的结构和材料,以确保桥梁的安全性和稳定性。
此外,在海洋码头的设计中,也需要考虑到波浪对码头的冲击力和侵蚀影响,采取相应的防护措施,延长码头的使用寿命。
此外,海洋动力学理论还可以应用于海洋工程中的潮汐研究。
潮汐是海洋中由于地球引力和月球引力的作用而产生的周期性海水起伏现象,对于海洋工程的设计和施工具有一定影响。
通过海洋动力学理论的研究,可以了解潮汐的周期、幅度和变化规律,从而为海洋工程的设计和施工提供参考。
例如,在海洋发电厂的设计中,需要考虑到潮汐对发电设备的影响,确定设备的安装位置和工作时间,以充分利用潮汐能源。
此外,在海洋堤防的设计中,也需要考虑到潮汐对堤防的冲击力和侵蚀影响,采取相应的防护措施,确保堤防的稳定性和安全性。
综上所述,海洋动力学理论在海洋工程中的应用具有重要意义。
海洋工程装备动力学考核试卷

5.海洋工程装备的稳定性可以通过增加装备的质量来提高。()
6.在深海作业中,海洋工程装备不需要考虑深海压力的影响。()
7.海洋工程装备的建造材料只限于金属材料。()
8.海洋工程装备的操纵性与其设计无关。()
9.海洋工程装备在波浪中的动力响应不会受到装备结构形式的影响。()
8.装备尺寸、设计、海洋环境、操作技能
9.深海压力、温度、生物
10.防腐蚀材料、表面涂层、阴极保护
四、判断题
1. ×
2. ×
3. ×
4. ×
5. √
6. ×
7. ×
8. ×
9. ×
10. ×
五、主观题(参考)
1.影响因素包括波高、周期、装备质量、浮体形状等。改善耐波性可以通过优化浮体设计、增加稳性翼、使用阻尼器等。
A.稳性翼
B.浮体宽度
C.增加水下体积
D.减少浮体高度
14.以下哪些技术常用于海洋工程装备的建造?()
A.焊接技术
B.预应力技术
C. 3D打印技术
D.防腐蚀技术
15.海洋工程装备的动力学模型中,以下哪些假设是常见的?()
A.流体为理想流体
B.忽略流体的粘性
C.装备为刚体
D.波浪为规则波
16.以下哪些方法可以用于减小海洋工程装备在波浪中的运动?()
A.钢材
B.塑料
C.木材
D.玻璃
17.海洋工程装备在波浪中的运动响应分析中,以下哪个模型主要用于描述波浪的随机特性?()
A.波浪谱模型
B.确定性波浪模型
C.线性波浪模型
D.非线性波浪模型
18.以下哪个海洋工程装备主要用于海洋油气资源的开发?()
水下机器人水动力学性能研究
水下机器人水动力学性能研究水下机器人已成为近年来海洋航行领域的重要研究课题。
水下机器人具有大量的应用领域,如海洋探测、水域救援等。
然而,在许多情况下,水下机器人的性能表现并不如人们所期望的那样。
水下机器人的水动力学性能是它们如何控制、导向和保持稳定的重要影响因素。
因此,水下机器人水动力学性能的研究有着非常重要的意义。
水动力学性能可以帮助研究人员更好地了解水下机器人在水中的行为。
水下机器人的水动力学性能包括摩擦、阻力、推力和流体力学等方面。
这些因素都对水下机器人的控制和稳定性产生着重要的影响。
水动力学性能对水下机器人的设计、生产和控制等方面都有着深远的影响。
一般而言,水下机器人的水动力学性能研究需要进行一系列实验,以获取相关数据来验证模型。
在进行实验时,研究人员需要考虑许多因素,如水温、水深、水质、控制系统和水下机器人的形状等。
另外,为了准确地研究水下机器人水动力学性能,研究人员还需要探究水流和水流动的物理规律,以便确保实验的可重复性并提高实验数据的精度。
在研究水下机器人的水动力学性能时,需要考虑许多不同的因素。
其中,最重要的是流体力学参数,如阻力系数、升力系数和摩擦系数等。
这些参数对水下机器人的性能有着深刻的影响。
例如,当水下机器人在水中运动时,会受到水对其运动的阻力,这种阻力会影响水下机器人的稳定性和操纵性。
在水下机器人的设计和制造中,需要考虑如何降低这种阻力,以便提高水下机器人的运动速度、降低噪音等。
此外,升力系数和摩擦系数也是研究水动力学性能的关键参数,它们可以影响水下机器人的浮力和航行稳定性等。
如今,随着科技的不断发展,有许多新的水下机器人水动力学性能的研究方法和技术。
例如,计算流体力学(CFD)和数值模拟等技术,已经被广泛应用于水下机器人的性能研究中。
这些技术可以帮助研究人员模拟水流和水下机器人的行为,提高实验结果的准确性和可信度。
同时,这些技术还可以帮助设计师们更好地设计和制造水下机器人,提高其水动力学性能。
海洋工程装备深海科学研究考核试卷
19.深海油气开采过程中,以下哪些措施可以提高作业效率?()
A.高效的钻头设计
B.自动化控制系统
C.优化的作业流程
D.先进的浮式生产储油装置
20.以下哪些是深海潜水器上常见的科研设备?()
A.摄影机
B.声纳系统
C.化学分析仪器
D.生物采样器
三、填空题(本题共10小题,每小题2分,共20分,请将正确答案填到题目空白处)
答题括号:__________和________
5.深海油气开采过程中,______技术是防止油污染的关键。
答题括号:__________
6.深海生物研究中,______生物在极端环境中具有特殊的生态适应机制。
答题括号:__________
7.深海潜水器的导航定位主要依赖于______和______技术。
A.海洋生物多样性
B.海底地质结构
C.海洋环流
D.海洋矿产资源
5.深海环境对海洋工程材料的影响主要包括?()
A.腐蚀
B.疲劳
C.水合
D.生物降解
6.以下哪些技术可用于深海探测?()
A.声学探测
B.遥感探测
C.电磁探测
D.光学探测
7.深海生物的研究对以下哪些领域具有重要意义?()
A.生物技术
B.新药开发
1.深海潜水器按照有无搭载人员可以分为____潜水器和____潜水器。
答题括号:__________和________
2.深海环境中的压力随深度的增加而______。
答题括号:__________
3.深海工程装备中,______材料因其轻质和高强度被广泛应用。
答题括号:__________
4.深海科学研究对于了解地球的______和______具有重要意义。
波浪作用下钻井船月池内流体水动力性能研究

波浪作用下钻井船月池内流体水动力性能研究波浪作用下钻井船月池内流体水动力性能研究随着海洋工程的发展,钻井船在海上作业的需求日益增加。
而月池技术则成为钻井船在海上作业中最受欢迎的技术之一。
月池技术是利用钻井船内部的池子来控制和维持钻探作业的平稳进行。
然而,月池内部的流体水动力性能问题一直是钻井船海上作业中需要解决的课题之一。
钻井船月池内的流体水动力性能问题是影响钻探作业正常进行的主要因素之一。
钻井船海上作业过程中,受到海浪的影响,钻井船内部的月池也会受到波浪的作用。
波浪对月池内的流体水动力性能产生不可忽视的影响,容易引起池液的剧烈波动,进而影响钻探平稳进行。
因此,钻井船月池内流体水动力性能研究对保障海上钻井作业的顺利进行至关重要。
在研究钻井船月池内流体水动力性能时,需要考虑到波浪对月池内流体的影响。
一般来说,波浪作用下月池内流体运动状态表现为液面的周期性变化和液体运动状态的剧烈波动。
这些变化直接影响海上钻井作业的质量和效率。
通过数值模拟的方式,可以模拟月池内流体受到波浪作用的情况下的运动状态,并进一步研究月池内流体水动力学性能。
例如,可以通过计算月池内流体的速度、压力等参数来探究月池内流体的运动规律。
此外,利用流体动力学模拟和可视化技术,可以直观地了解月池内流体在波浪作用下的运动规律,以及其对钻探平稳进行的影响。
总之,钻井船月池内流体水动力性能是海上钻井作业的重要问题之一。
为了保障钻探作业的正常运行,需要对月池内流体受到波浪作用的情况下的运动状态和水动力性能进行深入的研究。
该研究将有助于在海上钻井作业中提高钻探作业的效率和质量,促进海洋工程技术的发展。
钻井船月池内流体水动力性能的研究需要考虑到波浪对月池内流体的影响。
根据实际的行业数据和研究报告,可以列出以下数据并进行分析。
1. 波浪高度和周期对月池内流体的影响根据研究资料,当波高小于月池深度的1/3时,波浪对月池内流体的影响不大;当波高达到月池深度的1/2时,会引起月池内液面的振荡,对钻探作业的平稳进行产生一定的影响。
ITTC及船舶水动力学研究方向与重点分析
ITTC及船舶水动力学研究方向与重点分析中船重工集团七O二所沈泓萃摘要:本文介绍了1933年以来国际拖曳水池会议(ITTC)组织章程和技术结构的演变过程,分析了ITTC 各技术委员会的任务和研究结论,并运用系统分析的概念和方法,对第21〜25届ITTC的研究进行了梳理,指出了ITTC范围内船舶与海洋工程水动力学研究领域的重点发展方向和热点研究问题,可供国内拟制该领域的未来发展规划和计划作参考。
关键词:ITTC、水动力学、发展规划目录1 前言 (1)2 ITTC 发展史简介 (1)2.1 ITTC 组织与章程的演变 (3)22 ITTC EC 和AC的演变 (4)2.3 ITTC TC 结构的演变 (5)3 ITTC 水动力学研究任务与发展方向分析 (7)3.1 一般委员会的技术任务和结论分析 (7)3.1.1 阻力与流动研究领域 (11)3.1.2 推进研究领域 (12)3.1.3 操纵性研究领域 (14)3.1.4 耐波性研究领域 (16)3.1.5 海洋工程研究领域 (18)3.2 专家委员会的技术任务和结论分析 (20)3.2.1 功率性能专题研究方向 (25)3.2.2 非常规推进专题研究方向 (26)3.2.3 空泡与脉动压力专题研究方向 (27)3.2.4 波浪中的稳性专题研究方向 (29)3.2.5 海洋环境模拟专题研究方向 (29)3.2.6 高速船专题研究方向 (31)3.2.7 冰海航行性能专题研究方向 (32)3.2.8 共性基础技术专题研究方向 (33)4 ITTC 水动力学研究重点分析 (34)4.1 概念探索研究重点 (35)4.1.1 真实海洋风浪流环境建模 (35)4.1.2 高雷诺数下平台周围湍流流动现象和响应 (35)4.1.3 自由面现象和响应 (36)4.1.4 空化现象和响应 (36)4.1.5 学科交叉耦合 (36)4.2 试验方法研究重点 (36)4.2.1 测量技术 (36)4.2.2 模拟试验技术 (37)4.2.3 试验评估技术 (37)4.2.4 外推和换算技术 (38)4.3 数值方法研究重点 (38)4.3.1 CFD 建模技术 (38)4.3.2 CFD 验证技术 (39)4.3.3 CFD 应用技术 (39)4.4 设计应用能力研究重点 (40)4.4.1 新船型设计及其综合航行性能分析和优化 (40)4.4.2 新型推进装置设计及其性能分析和优化 (40)4.4.3 环境效应评估与安全性设计 (41)5 结语 (41)6 参考文献 (41)1 前言2008 年对于我国船舶水动力学研究群体来讲是值得庆贺的一年。
海洋能源开发装备中关键力学问题专题序

海洋能源开发装备中关键力学问题专题序
阎军
【期刊名称】《力学学报》
【年(卷),期】2022(54)4
【摘要】海洋中石油、天然气及风能、潮汐能等能源储量丰富,海洋能源的开发是当今世界各国竞相开发的关键领域.海洋能源的开发离不开一系列先进的工业装备,经过长期持续不懈的研发,我国已经基本具备了海洋能源开发装备设计、生产、测试和应用的关键技术.同时,由于研发起步相对较晚,部分技术仍未能实现完全自主可控,其中蕴含了丰富的关键力学问题的挑战.随着海洋强国战略的实施,我国的科研院所、高等学校和相关企业积极开展了海洋能源开发装备中关键力学问题的研究.部分工作已经取得了丰硕的成果,实现了技术突破,为我国海洋能源开发装备的自主可控研发与创新奠定了扎实的力学基础.
【总页数】2页(P844-845)
【作者】阎军
【作者单位】大连理工大学工程力学系;大连理工大学宁波研究院
【正文语种】中文
【中图分类】F42
【相关文献】
1.南海开放共享航次关键科学问题的思考——从多尺度海洋动力学角度出发
2.冰工程中的关键力学问题专题序
3.高速列车设计和服役关键力学问题专题序
4.发动机中的关键流体力学问题专题序
5.海洋电缆中关键力学问题的研究进展与展望
因版权原因,仅展示原文概要,查看原文内容请购买。
海洋工程装备的技术需求前沿
海洋工程装备的技术需求前沿【编者按】近期,本刊记者参加了在上海举办的“中国船舶工业与海洋工程发展国际高峰论坛”,中国工程院院士吴有生就海洋工程装备的技术需求作了精彩演讲。
演讲包括海洋工程装备的种类和技术需求,并对中国海洋工程的发展提出建议。
本刊记者对部分内容作了整理,以便让读者对海洋工程装备有所了解。
1. 深海油气资源开发平台技术我国目前勘探水深尚未突破500m,200m以下为联合开发,600m以下尚未涉及。
目前急需作业效率高的深海作业平台,可抵御海面风浪环境的不良影响,可全天候、长时间作业。
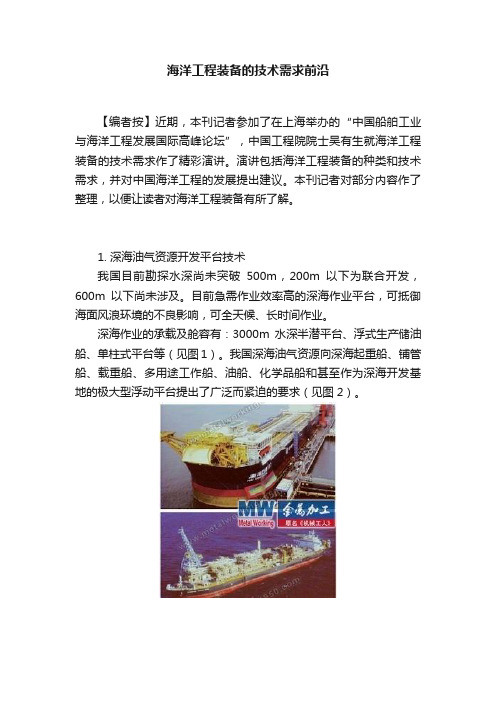
深海作业的承载及舱容有:3000m水深半潜平台、浮式生产储油船、单柱式平台等(见图1)。
我国深海油气资源向深海起重船、铺管船、载重船、多用途工作船、油船、化学品船和甚至作为深海开发基地的极大型浮动平台提出了广泛而紧迫的要求(见图2)。
2. 水面平台配套设备技术半潜式平台、浮式生产储油船、张力腿平台以及单柱式平台等各类水面平台上装有各种功能模块及复杂的动力、机械、化工、液流及电控设备,规格品种多,对技术性能、材料、精度、可靠性寿命及环境适应性的要求十分严格,专利技术多,附加值高,是我国海洋工程装备设计与制造技术中最薄弱的环节。
目前急需突破技术,实现关键设备国产化(见图3)。
3 . 水下生产系统(SUBSEA)的设备技术水下采油生产装备包括水下井口、钻井底盘、采油树及组件、海底管汇或基盘(见图4)、巨型阀门、增压泵、压缩机、水下输配电系统、湿式插头和流量计等;水下采油生产控制系统包括水面终端控制系统(主控站、水下电源和通信单元、液压动力单元、上部脐带终端和化学药剂罐等)、水下控制系统、脐带和水下分配系统;管线系统包括柔性立管,生产、回接、输气和注水管线。
4. 水下系统的安装与维修技术水下生产系统的安装难度大,效率低。
深海安装与维修作业潜器与工具的国产化极低,而生产系统水下安装施工的费用约占海洋油气田全寿命费用的36%,100m以下生产系统的安装与维修则全部采用租赁方式,每天费用高达10~15万美元。