伦茨伺服电机 电子版(原ID13267024)
伦茨 SMV矢量型变频器 说明书
应用
此驱动器不可作为安全装置应用于存在人身伤害或物料损坏风险的机器。紧急停机、过速保护、加 速和减速限制等必须通过其它装置完成,以确保任何条件下的正常运转。 此驱动器的确具备许多保护性装置,目的是通过产生故障断电关停驱动器和电机以保护驱动器及受 驱动设备。电源的变化也会导致驱动器停机。当故障条件消失或被清除,驱动器会配置为自动重 启,用户和/或OEM(原始设备制造商)和/或集成商应负责将驱动器设置为安全运行模式。
13345258
SMV矢量型变频器 使用说明书
目录
1 安全信息.............................................................................................. 3
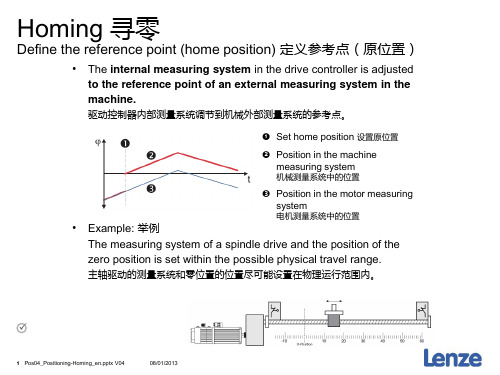
伦茨伺服回原点
7 Pos04_Positioning-Homing_en.pptx V04
08/01/2013
As easy as that.
6 Pos04_Positioning-Homing_en.pptx V04 08/01/2013
Exercise: Homing 练习:寻零
• • Change the motor control to “servo control“ 改变电机控制到”servo control” Activate a reference search mode which 激活一个参考搜索模式 a) runs in negative direction 运行在反方向 b) reference with 20 % torque 参考值为20%的转矩 c) waits at an end stop for 0.5 s 等待终点止动0.5s d) the home position is 50 mm in front of the mechanical end stop 原位置在机械终点止动前的50mm处 e) the target position after reference search is the zero point of the measurement system 参考搜索后的目标位置是测量系统的零点位置。 • Start the reference search via the handling box 通过操作箱启动参数搜索 RFR = Controller enable an simulate the mechanical end position by the hold of the driven pulley. 通过从动摩擦轮的保持来模拟机械的终点位置
伦茨说明书

%& ’ !!!!!!!!!!!!!!!!!!!!!!!!!!!! ’( ( ) !!!!!!!!!!!!!!!!!!!!!!!!!!!!! ’$
>?8 >&$
UVW X !!!!!!!!!!!!!!!!!!!!!!!!!!!!! (% YZ [ !!!!!!!!!!!!!!!!!!!!!!!!!!!!!! (’ \]^ _ !!!!!!!!!!!!!!!!!!!!!!!!!!!!! ;; OP9)‘ a !!!!!!!!!!!!!!!!!!!!!!! ;; %&8&8
gh5 i !!!!!!!!!!!!!!!!!!!!!!!!!!!!! !$ jk$;<= > !!!!!!!!!!!!!!!!!!!!!! !$ %"!"!
$"#"# $"#"$ $"#"%
&"
% - !!!!!!!!!!!!!!!!!!!!!!!!!!!! !$
%"!
%"!"# %"!"$
%&5il$_‘5 i !!!!!!!!!!!!!!!!!!! !% ! mno " KZ[S -#336768))$ $5 i !!!!!!!!!!!! !’
!’ !’ !, !. !. !!!## #$ #$ #$ #’ #,
!
! "
!"
# $ !!!!!!!!!!!!!!!!!!!!!!!!!!!!! #$
!"# !&$
!" # !!!!!!!!!!!!!!!!!!!!!!!!!!!!!! $% $%&’()*+, - !!!!!!!!!!!!!!!!!!!!!!! $’
伦茨 伺服控制器样本
带内置技术功能的伺服驱动控制器 9300 系列伺服控制器提供了令人信服的性能,操作简单且 具有高度灵活性,这使其能够适应特定的运行环境。在预配 置技术功能的基础上,可对单个功能块的连接方式进行修 改,以使驱动器能够为当前的驱动操作提供正确性能。有六 种基本形式可用,使得伦茨提供了各种潜在应用程序的全面 支持: ƒ 9300 伺服控制器 ƒ 9300 伺服定位控制器 ƒ 9300 伺服凸轮 ƒ 9300 伺服套准控制器 ƒ 9300 伺服 PLC ƒ 9300 伺服 PLC 技术 所有六种形式共享标准化硬件,因此,您可以根据自己的需 要自由组合各种配置。也可通过标准化设备接口,进行参数 化和相应操作。
9300 伺服控制器系列
自由连接功能块
预置技术功能 操作系统 伺服控制器
14
†
伺服控制器zh 04/2009
9300 伺服控制器
产品信息
9300 - 伺服控制器系列
9300 伺服控制器 伺服驱动中所需的最常见的基本功能都可在 9300 伺服控制 器中执行。电子减速机是该驱动中一个非常重要的技术功 能。作为机械轴的替代方案,多轴驱动可通过数频耦合实现 完全同步运行。在这个过程中,可调减速机因素可在最小扰 动和最大灵活性下实现同步减速比。反馈系统,如正弦余 弦编码器可作为标准旋转变压器方案的替代方案,以确保最 大精度。 ƒ 机器人 ƒ 搬运和分类 ƒ 运输驱动 ƒ 成型驱动 ƒ ...
伺服控制器
动力十足、强大而轻巧
这就是我们所代表的 您是否在寻求完善并简化机器、提高工厂 效率,优化现有理念减少成本的方法?那 么Lenze就是您正在寻找的合作伙伴。60多 年以来驱动和自动化系统一直都是我们的 核心竞争力。
伦茨自动化技术在各行各业的应用-物流行 业,纺织印染行业,汽车行业,工业机器 人等。
13.伦茨减速电机说明书
8
接线板上的电源连接
单旋转电机
变极电机
Υ
Δ
双压电机 ΥΥ
图例说明
Υ
iNLiOLiP
q_NLq_O
ΥΥ
Υ
温度监控连接
接线排L接线板 含义 热触点 q`l mq` 热敏电阻
热敏元件 Hhqv 热敏元件 Jhqv
名称(bk SMMPQJU) q_N q_O qmN qmO oN oO
可用于所有热敏元件的接线板或端子
jq|juuuu|MMNKáëçLÇãë
电源连接 热触点 J q`l 低速度 高速度 低速度 高速度 mb连接E可选F
注释 最大 ORM sú 最大 NKS ^ú
注意极性
MA 33.0005 ZH/EN 5.0
9
反馈系统的连接
旋转变压器 端子 _N _O _P _Q _R _S _T _U
标识 H oÉÑ J oÉÑ
Ä.OIeä
MA 33.0005 .OIe
安装指导 Mounting Instructions
M....
MMA, MERA... V1
交流电机
AC motors
_JNQ 法兰螺纹孔尺寸
C
Screw-on dimensions for B-14 flange
S
MDERA056 V1 MDERA063 V1 MDERA071 V1 MDERA080 V1 MDERA090 V1 MDERA100 V1 MDERA112 V1 MDERA132 V1
ƒ Hazardous voltage at the power terminals, even if the plug is removed: residual voltage >60 V!
伦茨gdc序列号 -回复

伦茨gdc序列号-回复您好!很高兴收到您的主题,请允许我为您准备一篇关于伦茨GDC 序列号的文章。
【伦茨GDC序列号】——了解伦茨变频器的独一无二身份引言:伦茨变频器是一种常见的工业设备,用于控制电动机的转速和扭矩。
在伦茨变频器的每个产品上都有一个独一无二的GDC(General Drive Control)序列号。
本文将为您介绍伦茨GDC序列号的定义、作用以及如何应用。
第一部分:GDC序列号的定义和结构伦茨GDC序列号是由一系列字符和数字组成的标识码。
这个序列号主要用于区分不同的伦茨变频器产品,并且能够为每个个体设备赋予一个独一无二的身份。
GDC序列号一般由8到12个字符组成,包括数字和大写英文字母。
GDC序列号结构通常是按照以下方式组织的:[厂商代码]-[产品代码]-[年份代码]-[序列号]厂商代码代表伦茨变频器的制造商,通常是一个字母或一组字母,用于唯一标识该厂商。
产品代码代表具体的伦茨变频器型号,它可以是一串字母或数字的组合。
年份代码代表生产日期,一般是两个数字表示的年份。
序列号是为伦茨变频器产品分配的连续数字,用于区分同一型号不同设备的标识。
第二部分:GDC序列号的作用GDC序列号是伦茨变频器产品的重要标识码,具有以下作用:1. 产品追溯性:GDC序列号可以追溯到每个具体的伦茨变频器产品的制造过程和历史。
厂商可通过序列号了解设备的零部件配备和生产记录,以及质量控制过程的可追溯性。
2. 售后服务:GDC序列号为售后服务提供了重要依据。
用户在维修或更换零件时,向厂商提供GDC序列号可以使其更快地找到相关产品信息,提供准确的技术支持和保修服务。
3. 反盗版和与伪劣产品的斗争:伦茨作为知名品牌,GDC序列号可以用于防止盗版和伪劣产品的流通。
通过检查产品的GDC序列号是否真实有效,业主可以保证购买到正品的伦茨变频器。
4. 市场监管和统计分析:GDC序列号也对市场监管和数据统计具有重要意义。
厂商可以通过对销售产品GDC序列号的收集和分析,了解其产品的市场占有率、运行情况和售后需求,以便做出更好的产品决策及市场推广策略。
伦茨 伺服PLC(9400)

伦茨9400ServoPLC2010-09-02 伦茨(上海)传动系统有限公司供稿●卓越的性能⏹高效利用驱动功率⏹有效降低总线系统负载⏹PLC与伺服控制器之间无需通讯,缩短了总线扫描时间,提高了响应速度,改善了控制特性⏹强大的联网能力⏹低成本,高效益●完整的系统构成⏹PLC编程与驱动控制同时进行⏹系统调试简便,快捷⏹预装功能集丰富,完善⏹便于构建更合理,灵活性更高的驱动控制系统⏹内部集成制动斩波器-可直接连接制动电阻⏹电机制动模块可选-内部集成制动器控制功能块●技术参数⏹程序存储量8M⏹E2PROM缓存128kB⏹内部RAM 曲线数据128KB⏹内展数字输入 8个(均可作为探针使用)⏹数字输入、输出可使用CAN扩展⏹数字输出4个⏹模以输入2路(11位+符号)输入形式:+/-10V,1路可切换为:+/- 20mA⏹模以输出2路(10位+符号),-10V 到+10V⏹数字频率输入0~500KHz⏹数字频率输出0~500KHz⏹编码器增量编码器或正/余弦编码器⏹接口PROFIBUS-DP,ProfiNet,INTERBUS,系统总线(CANOpen), DeviceNet ,EthernetPowerlink,Digital Frequency●软件功能⏹L-Force Engineer◆示波器功能,最小采样周期为1ms◆维护日志,可记录所有故障信息◆功能块编程,即插即用方便高效⏹PLC_Desinger◆CodeSys 编程环境◆IEC 61131-3 LAD/IL/FBD/ST/SFC 标准编程语言。
伦次变频器说明书

伦茨(Lenze)变频器8200Vector系列使用说明注:本说明适用于梳棉机FA231A所使用 Lenze E82EV系列变频器包括内容:1.标准接线及安装1.1 400V控制器的主电源接线1.2 电机接线1.3符合EMC标准的安装1.4控制端子接线及说明2. 用操作面板进行参数设定2.1访问,设定所有参数2.2拷贝参数到操作面板2.3从操作面板复制参数到变频器2.4 输出转速的在线调整--用操作面板输入频率(hz)与其他给定值相加3.重要参数代码说明3.1 C0014代码可设置控制模式3.2 电机数据的输入/自动检测(C0087;C0088;C0089;C0090;C0091;C0084;C0092;C0148)3.3 JOG固定频率给定值(C0037,C0038,C0039)3.4 给定值选择(C0001)3.5 模拟输入给定的调整(C0026;C0027)3.6 PTC电机温度监控(C0119)3.7 数字输入信号配置(C0007)3.8 最小输出频率(C0010)3.9 最大输出频率(C0011)3.10 主加速时间(C0012)3.11主减速时间(C0013)3.12快停减速时间(C0105)3.13数字输入信号E1-E6电平反相(C0114)3.14 模拟量输入范围设定(C0034)3.15电流极限设定(C0022,C0023)4.故障诊断及排除4.1运行状态显示4.2故障查询5. 梳棉机FA231A变频器参数设定表5.1 E82EV222S4B参数设定表5.2 E82EV751S4B参数设定表6.变频器调试程序表7.产品维护,保养要点1.标准接线及安装1.1 400V控制器的主电源接线1.2 电机接线见上图注:BR1,BR2外部制动电阻T1,T2电机温度监控PTC热敏电阻或热继电器1.3符合EMC标准的安装注:将控制线及电源线与电机电缆分开使用低寄生电容电缆。
每单位长度电容值:●芯/芯≤75pF/m●芯/屏蔽层≤150pF/mEMC电缆密封垫按铭牌进行电机接线使用表面导电的安装板以尽可能大的导电表面将电缆屏蔽层连到PE上。
伦茨变频器电脑操作软件《GDC操作入门》ppt课件
Help
打开该代码的在线帮助
依赖于参数类型的参数值指表达式: 选择型(列表)
你可以在设定参数值列表之中选择一个新的设定值;当打开输入对 话框时黄色光亮背景对应的设定值为当前选定值。
24
8、GDC软件的用户界面——输入对话框
二进制型
每位及其对应的意义均 被列出;
该参数值是二进制代码; 可以通过鼠标左键或键
在程序第一次启动后,如果未连接相应的通讯硬件或在GDC中相 应的通讯配置不对,将出现以下的对话框
4
2、启动软件
此时可以点击Options → Communication…出现以下对话框
5
2、启动软件
如果采用的Lecom A/B协议,点击Lecom A/B ,使蓝色图标位于Lecom A/B上, 在点击Parameter…对该协议的通讯口进行设定。现在以选择Systembus(CAN) 为例介绍通讯参数的设定, 点击Parameter…,并激活PC system bus adapter 2173即出现如下对话框;这就完成了2173通讯模块组态;点击该对话框中的 Setting菜单, 可以对总线参数进行修改。
F7 将参数从目标系统转到PC(在线)
F8 目标系统开始运行(在线) (控制器使能 C0135)
F9 目标系统运行停止(在线) (静止控制器使能 C0135)
调用功能块编辑器
调用示波器功能
调用电机输入助手
19
8、GDC软件的用户界面——状态条
①
控制器相关信息
⑥ IMP:控制器禁止脉冲输出
②/③ 控制器相关对话框的 ⑦ 当前模式(在线/离线) 状态信息
29
8、GDC软件的用户界面——示波器功能
伦茨402变频器中文说明书
伦茨402变频器中文说明书CNLenze伦茨伦茨传动系统伦茨秉承“一站式服务”理念.致力子为用户提供上至电网.下至机器输出轴的完整的工业自动化传动系统解决方案.这其中包括性能卓越的变频器.交流伺服控制器.电机.减速机以及制动器.离合器.直至通讯及自动化产品。
伦茨传动产品的开发.制造.销售及服务完全符合德国工业标准(DIN)和国际标准化组织(ISO)标准.并己获得相关证书完整的产品体系及其强大的普适性使伦茨传动产品广泛应用子几乎所有工业领域。
凭借其遍布全球的销售和服务网络.伦茨可为用户提供从产品选型.安装.调试.系统维护.技术培训.直到专家咨询的全套服务。
同时,多年的工业传动专业应用经验使伦茨能够提供传动系统的交钥匙工程。
选择伦茨一优势尽在掌握,S0Wlli)王电源电压主电流电流额定输出电流最大输出电流ACDC父流电直流电DIN德国工业标准PrkW电机额定功率EMCP lossW变频器功耗MrNm电机额定转矩ENLmH电感值IECRn电阻值IPUGV 直流母线电压srkVA变频器输出功率NEMAchkHz斩波频率VDEmaxHz最大频率CEfdHz输出频率IM电磁兼容性欧洲标准国际电工委员会国际保护代码国家电气制造商协会德国电气工程师协会欧洲委员会国际安装代码命名方式E VF|93|xx|-|E|V||1 I1Lr11L1ii1傲MELHH傲电气产品变频器。
技术特性1.1通用数据31丄1 0.37-90kW变频器31丄2 110-400kW变频器41.2控制特性5第二章选型参数2.1 0.37-90kW变频器选型参数72.1.1 0.37-90kW变频器常规运行(150%过载)额定数据72丄2 0.37-90kW变频器过载运行(120,过载)额定数据112.2 110-4 00kW变频器选型参数152.2.1主电源电压为400VAC,无直流母线运行152.2.2主电源电压400V,允许直流母线运行172.2.3主电源电压为500VAC 19第三章机械安装3.1安装规范213.2 0.37-90kW变频器的安装223.2.1固定导轨安装223.2.2。
伦茨伺服电机 电子版(原ID13267024)
14
A 0.018
0.04 A
221.4
Mn
MPS0304203
4.18
Nm
Mo
Mmax
Nn
Nmax
Io
In
Imax
Pn
Pole
5.2
27.7
1995
2500
2.36
2.00
14.21
0.87
8
Nm
Nm
RPM
RPM
A
A
A
kW
Ke
Kt
Ls
Rs
Fn
Cos
Un
Jm
M
IP
MPS0304203
138.61
2.29
Rated current A
0.45 2.02 0.98 1.53 2.00 1.77 2.75 1.4
4 2.1 4.1 2.9 3.2 4.34 8.3 6.4 11.6 8.5 14.0
Rated power kW
0.20 0.77 0.43 0.57 0.87 0.52 0.88 0.6 1.2 0.9 1.67 1.2 1.67 2.63 3.78
Any.
伦茨 Global Drive smd系列变频器 说明书

2 3
安全信息……………………………………………………………2 技术数据………………………………………………………………4
3.1 3.2 通用数据 / 应用条件…………………………………………………………………………4 额定数据…………………………………………………………………………………… 5 3.2.1 3.2.2 1AC 控制器额定数据………………………………………………………………5 3AC 控制器额定数据………………………………………………………………5
!" 0.7g >3.5mA IP20 !" !"#$%&'( <0.5kW 0.5...1kW >1kW !" ! !"#$ !"# !" !
EMC !"#$%&'
!"#$%&'()*+,-. ! / !"#$%&'(
!"#$%&'()*+, EN61000-3-2
4
!
3.2 3.2.1 1AC
5 6 7 8
上电调试………………………………………………………………1 2 参数设定………………………………………………………………1 3 代码表…………………………………………………………………1 4 故障诊断与排除………………………………………………………2 0
i
1
1.1 !"#$
!"#$ smd !"#$%&' !"#$%&'( ( rev 14 !" !"#$%&'( !"#$%
伦茨变频器

ESMD1124TMF ESMD2224TMF ESMD5524TMF ESMD1134TMF ESMD2234TMF
0.37 0.75 1.5-3.0 4.0-7.5 11
SMV 变频器 0.37~22kW
8
SMVector 性能
9
6
/
- V/Hz V/Hz /
8 ID V V % (A) (%) (kW) (kWh) ( C) 10 VDC ( 20 mA
ESV251N01SX* ESV371N01SX* ESV751N01SX* ESV112N01SX*
120V
1.7 2.4 4.2 6.0
0.33 0.5 1 1.5
0.25 0.37 0.75 1.1
G1 G1 G1 G2
240V
N/A R1 R1 R2
N/A AA1 AA1 AA2
200/240V
IN [A] Hp kW
(3
NEMA 1 (IP31)
)
NEMA 4X (IP65) NEMA 4X w / Disconnect
12
ESV251N02SX*(1)(2) ESV371N02YX* (2) ESV751N02YX* (2) ESV112N02YX* (2) ESV152N02YX* (2) ESV222N02YX* (2)
1.3/1.1 0.5 2.4/2.1 1 3.5/3.0 1.5 4.0/3.5 2 5.5/4.8 3 7.6/6.3 4 9.4/8.2 5 12.6/11 7.5 16.1/14 10 24/21 15 31/27 20 39/34 25 46/40 30 480/600V
0 - 10 VDC 4 - 20 mA 0 - 10 VDC/2 - 10 VDC 10VDC 12VDC 20mA 12VDC 50 mA
lenze
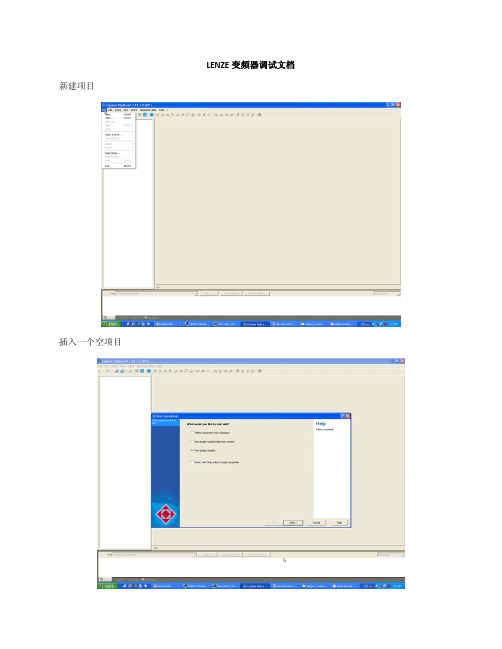
LENZE变频器调试文档新建项目插入一个空项目新建项目名称完成插入一个空项目操作完成后与变频器建立连接选择连接通讯方式选择PROFINET写入要连接变频器的IP地址连接成功后的状态显示数据上传数据上传完成选择电机型号输入电机编码检查设备名称与西门子硬件组态中的名称一致上传安全参数输入密码:Lenze SM301参数上传成功安全参数设置画面安全参数状态监控安全参数修改:Module ID 参数设定Safety address 参数设定Safe stop 参数设定SMS:Maximum speed Nmax设定为0Safety bus 设定故障复位控制字和状态字参数变频器端监控现有程序下载,打开现有程序打开完成后的9400程序界面设定通讯连接方式设定要连接的9400的IP地址连接成功后,在线的状态下载程序下载时如果出现下面的画面,有可能多台电脑监控同一个变频器,离线重新来一遍,就OK 。
、温度PTC屏蔽的步骤:(伺服电机需要屏蔽此信号,异步电机不需要屏蔽)安全状态字的含义:变频器安全程序正常状态时的各项值:即无ERROR,没有进入STO,另外,进入STO不是错误,只是说明电机禁止运行的状态,也即为安全停车。
PS_AIE为出现故障错误(比如急停双通道中,一个通道断掉时的情况,若出现这种情况,把双通道的线接好以后,再把急停按下后,再拔出,然后再按复位,这样才能把由于这种情况引发的故障复位掉,否则有可能复位不掉)停车时的复位,同时会引发系统会进入STO状态,PS_AIS为进入STO状态时,需要按个按钮确认后才能具备启动条件。
这些的前提条件要看SAFE STOP的设置,为ACKNOWLEDGED RESTART这种情况下,出现STO、急停等错误时需要先复位ERROR,然后复位STO,二者有先后顺序。
为AUTOMATIC RESTART这种情况下,只需要进行ERROR的复位,无ERROR即可自动复位STO状态STO的状态,正常状态为0,出现ERROR或安全情况等时为1,此时STO状态灯黄闪变频器正常状态:变频器进入STO状态:SIMULATION ,运行电机打开仿真程序对话框,此情况下总线发出的指令已经不起作用了。
MOTEC交流伺服电机样本
MOTECMOTEC 故障信息、故障原因及处理措施MOTEC 监视模式代码Err- 21Err- 22Err- 23Err- 24Err- 25Err- 26Err- 27Err- 30Err- 33Err- 36Err- 37Err- 38Err- 39Err- 44Err- 45Err- 46Err- 47说明编码器通信数据错误(此错误只有采用通信方式反馈形式时才生效未检测到编码器编码器信号异常位置偏差过大速度偏差过大超速报警输入脉冲频率过高缺相报警功率模块故障初始化参数错误EEPROM故障CWL正转限位保护CCWL反转限位保护电流检测存在错误如电流传感器损坏电机过热电机电流异常软件过流保护故障原因编码器通信数据受到干扰导致通信校验码不正确1编码器没有与驱动器连接2编码器与驱动器之间接触不良3编码器损坏1编码器信号受到干扰2编码器接收到异常信息1位置模式下指令脉冲频率过高2电机轴卡死,造成电机堵转3脉冲输入端子受到严重干扰4位置偏差报警值太小1电机速度运行异常 2电机被堵转3电机U,V,W接线错误,导致电机无法正常启动1电机速度超过最高限制值2电机运行速度异常1位置控制模式下输入脉冲频率过高2脉冲输入受到干扰1检测到电机缺相不转2电机运转异常模块出现保护动作检测到参数错误内部EEPROM损坏在设置为正转限位报警状态下,电机在正转时驱动器检测到CWL有信号在设置为反转限位报警状态下,电机在反转时驱动器检测到CCWL有信号检测到电流零点异常电机过热保护器动作长时间检测到电机运行在预警电流状态下(常用于监测电机保持制动器异常。
对于不带电机保持制动器的电机也可以用于监测负载运行是否正常1负载惯量突变,如电机从高速状态下急停到02电机连线或电机内部故障3电机对地短路处理措施1检测驱动器与电机连接的FG端子是否接线正确2编码器电缆布线是否合理3编码器电缆长度是否太长1接上编码器2检查编码器与驱动器之间的连线是否可靠3检查编码器电缆与驱动器之间的连接是否可靠、或定位螺丝拧得太松或太紧4若是通信方式编码器,则重点检查编码器电缆布线是否受到强干扰1检查编码器接线是否良好可靠2检查编码器电缆布线是否合理(如与电机电源线或其它大电流电缆捆绑在一起3电机编码器损坏1降低指令脉冲频率2检测电机是否堵转3减小脉冲干扰,采用差分输入4增大PA6A位置偏差报警值1检查电机接线是否正确2检查负载是否正常1检查超速限制值PA66参数值是否太小2检查PA6B参数值是否太小3检测电机U,V,W相序对应驱动器定义是否正确4若在位置模式则检测输入脉冲是否受到干扰5若在速度模式则检查输入速度指令值是否太大1检查输入脉冲频率是否过高2检查输入脉冲是否受到干扰3电子齿轮比值太大1检查电机接线是否可靠2检测电机U,V,W相序对应驱动器定义是否正确3重新连接编码器电缆和电机U,V,W接线若重新上电后仍无法清除该故障,请送厂家维修1重新上电后系统执行自动修复2执行导入缺省参数进行修复3若连续重新上电均出现此报警超过3次则应返回厂家维修若重新上电后仍无法清除该故障,请送厂家维修1检查CWL输入逻辑电平2检查控制回路是否无误1检查CCWL输入逻辑电平2检查控制回路是否无误1确认电流零漂是否太大2按厂家指导执行零点自动校正1电机过热,改善电机冷却散热条件2电机编码器电缆接触不良导致报警1电机保持制动器没有松开2电机保持制动器控制电源异常3电机保持制动器损坏4功率选型太小5负载太重或异常6电流异常检测参数值(PA6E、PA6F参数值设置太小1检查负载控制回路是否故障2检查电机是否故障,如接线和接地是否无误3电机是否对地短路1314MOTEC MOTEC α系列交流伺服MOTEC α系列SED 交流伺服驱动器安装尺寸图 (单位mm说明CanBus通信超时同步偏差角度太大代码Err- 50Err- 51在CanBus同步控制模式下,若在设定时间内没有检测到有效的主/从机则报警在CanBus同步控制模式下,若同步控制角度偏差脉冲超出设定值则报警处理措施1检测通信电缆是否连接可靠2检测CanBus同步模式相关参数是否设置正确,重点检测主从两机如下参数: PAll=8PA91(相同值?PA93是否正确 PA9A是否太小?3通信电缆外围是否存在强干扰1检查最大允许偏差参数值(PA9C是否太小2主从两机负载是否差别太大3主从两机PA55、PA56是否为相同值Err- 65Err- 67Err- 68Err- 69Err- 70Err- 71Err- 72Err- 73Err- 74Err- 75Err- 76Err- 77Err- 78Err- 79Err- 80绝对值编码器过速报警绝对值编码器计数错误绝对值编码器计数溢出绝对值编码器过热绝对值编码器多圈信息错误绝对值编码器电池报警绝对值编码器电池错误配置奇偶校验错误相位误差超过锁相范围速度超过最大跟踪速率跟踪误差过大正余弦信号降级正余弦信号降级正余弦输入信号丢失正余弦信号过大信号干扰大信号干扰大信号干扰大编码器温度过高信号干扰大电池电压低没有连接电池信号干扰大信号干扰大信号干扰大信号干扰大信号干扰大信号干扰大信号干扰大信号干扰大检测编码器电缆,FN- 15可清除绝对值编码器报警检测编码器电缆检测编码器电缆检测编码器电缆更换电池正确连接电池检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆MOTECα交流伺服系统MOTECα交流伺服系统MOTECα交流伺服系统MOTECα交流伺服系统MOTEC MOTEC α系列交流伺服4电机侧523612345管脚6驱动器侧 J P1E5V E0VPS PS/管脚定义2电机侧345112345管脚6驱动器侧 J P1E5V E0VPS PS/管脚定义3电机侧782451管脚定义管脚定义驱动器侧 J P1四线制增量式编码器接线定义40-80 规格为6PIN 塑料插头,编码器选项7旋转变压器接线定义40-80 规格为15PIN 塑料插头,120、190 规格为10PIN 航空插头,接线管脚定义相同,编码器选项2绝对值式编码器接线定义40-80 规格为9PIN 塑料插头,编码器选项6120、190 规格为7PIN 航空插头,编码器选项7增量式编码器接线定义40-80规格,电机侧为15PIN 塑料插头,编码器选项3增量式编码器接线定义120规格,电机侧为19PINF G E 5V E 0V 电池+电池-PS PS/1810191214SG E 5V E 0VPS PS/电机侧管脚定义管脚定义驱动器侧 J P1120、190 规格为7PIN 航空插头,编码器选项6 F G E 5V E 0V 电池+电池-PS PS/12367451810191214SG E 5V E 0VPS PS/电机侧管脚定义电机侧管脚管脚定义驱动器侧 J P1******* 1811、1315、176、85、71、32、4SG R1R2S1S3S2S4123681115101241491375FG +5V 0V U+U-V+V-W+W-A+A-B+B-Z+Z-电机侧管脚72389101112131617181914154561FG0V U+U-V+V-W+W-A+A-B+B-Z+Z-NC NC NC NCMOTEC α系列交流伺服驱动器电气总接线图MOTEC PPP 模式=PLC+驱动器MOTEC 网络连接NFB NF MC L非熔丝断路器(NFB用来保护电源线,过电流时切断电路噪声滤波器(NF防止外部杂波进入电源线,并减轻伺服电机产生的杂波对外界的干扰磁力接触器(MC接通/断开伺服电机的主电源,磁力接触器应与浪涌吸收联用电抗器(L减少主电源中的谐波单轴运动系统完美解决方案无需专用控制器可完成回原点、单方向定长运动、正反转定长运动、色标捕捉定长运动可选相对值、绝对值坐标内置ModBus通讯协议,可以与主流触摸屏进行连接无需编程,只需设置运动参数可通过人机界面或驱动器操作面板设置运动参数已经成功应用于切袋机、电池裁切机、抓取工件MOTEC MOTEC α系列交流伺服增量式编码器接线定义190规格,电机侧为17PIN 航空插头,编码器选项3电机动力线定义电机侧管脚定义1121367101189452316171415FG +5V 0V U+U-V+V-W+W-A+A-B+B-Z+Z-NC NC电机侧法兰规格40-- 80120190接头管脚接头类型塑料四芯插头圆形航空插头圆形航空插头U 1(红222(蓝3(黄4(黄绿散线V W FG 抱闸抱闸散线3416734167RS485最大256个轴①②③MOTEC R MOTEC α交流伺服系统MOTEC α交流伺服系统MOTEC α交流伺服系统 MOTEC 伺服参数设置软件 MOTEC 电子凸轮轨迹编辑器MOTEC α系列交流伺服 MOTEC 系列交流伺服驱动器特性项目输入电源 SED- XX23 单相220VAC 系列 SED- XX33 单 / 三相 200VAC 系列 SED- XX53 三相 380VAC 系列控制方式使用温度保存温度使用及保存湿度耐振动及耐冲击构造冷却方式最大输入脉冲频率输入信号输出信号编码器反馈信号监视输出保护机能其它面板界面监控界面再生动态制动器速度频率响应特性规格 AC200/220V[- 15~+10%],单相 50/60Hz AC200/220V[- 15%~+10%],单 / 三相 50/60Hz AC380V[- 15%~+10%], 三相 50/60Hz 单相全波整流 IGBTSVPWM 方式 0~+45℃ - 20~+85℃ <85%[ 不结霜条件 ] 0.5G/2.5G 壁挂箱体式自然冷却方式 / 风扇冷却方式 500KPPS 伺服 ON、内部速度选择、模拟指令,方向控制、制动输入伺服报警、伺服准备好、定位完成、报警清除线驱动输出(ABZ) ; 集电极开路输出(ABZ)速度监视、电流监视、位置偏差等 17 项实时数据监视过流、过负荷、过热、过速、过压、欠压、控制电源异常主电源上电后 , 延后约 2 秒,执行伺服驱动器内部初始化 6 位LED 显示, 5 个操作按键 RS232/RS485 接口可选内藏制动电阻(3KW~6KW 功率驱动器再生电阻为外置)具有动态制动功能 400Hz 基本规格控制信号机能使用条件 25 26MOTEC R MOTEC α交流伺服系统 MOTEC 家族其他成员 MOTEC 家族其他成员 ·两相/三相步进系统 ·低压智能伺服系统 ·直流空心杯伺服系统 ·直角坐标机器人 ·五轴以上数控系统 ·精密行星减速器 MOTEC 步进系统 MOTEC 步进系统分为两大类:标准型和智能型。
伦茨9400伺服使用手册
伦茨9400伺服使用手册Welcome Practical introduction: 实用简介 L-force 9400 Servo DrivesL-force Engineer19 January 2007 Trainer: Torsten He Markus Toeberg Markus Warnecke StefanWitte 9400 Servo Drives Target Introduction to L-force 9400 and engineer First withoutengineer L-force 9400 和 engineer 的介绍 Engineer with single drive basics of TA 9400 servo drive set-up with interfaces Structured project further TA 9400伺服的接口设置 FB editor Parameter setting with Engineer and keypad Multi axis applications Onlinealternatives 通过Engineer 和操作面板进行参数设定 Technology Applications TA 技术应用 Diagnostics and configuration of the application with the function block editor使用功能块编辑器的应用配置和诊断 Next Back Multi axis application with horizontal CAN communication 2 使用CAN总线通讯的多轴应用 9400 Servo DrivesModular set-up ? 11 kW Target First without engineer Engineer with single drive basicsof TA Mounting base Structured project 安装底板 further TA FB editor Power module Multi axis applications 功率模块 Online alternatives Extension module 扩展模块Accessories Next Back 附件 3 9400 Servo Drives Interfaces at the power module Target First without engineer Engineer with single drive basics of TA CAN on board 内置CAN Structured project further TA 24 V supply and FB editor state bus 24V和状态总线 Multi axis applications Online alternatives Analog / digital IOs 2 module receptacles模拟/数字 I/O for extensions 2个扩展模块插槽 LEDs 指示灯 Diagnostic interfaceModule receptacle for 诊断接口 memory module 存储模块插槽 Resolver input 旋转变压器接口 Module receptacle for Next Multi encoder input safety technology Back 编码器接口安全模块插槽 HighLine StateLine: 1 个扩展插槽 4 9400 Servo DrivesLEDs Target First without engineer 指示灯 Engineer with single drive basics of TA CAN RUN CAN ERROR CAN 运行 Structured project CAN 错误further TA OFFCAN inactive CAN没激活 FB editor Bus warning Pre-operational 总线报警预操作 Multi axis applications Bus off Operational 总线关闭操作 Online alternativesDRIVE READY DRIVE ERROR 驱动器投入驱动器错误 OFF Pulse inhibit OFF OK due to an error 由于错误而禁止 Error status Controller inhibited 错误状态控制器禁止 System error Controller enabled 系统错误控制器使能 USER ready 24V 用户定义 Next Applicable in the application Back 在应用中使用 5 9400 ServoDrives Keypad Target First without engineer 面板 Engineer with single drive basics of TA 4 direction keys for navigation Structured project 4个方向键用于导航 further TA 2context-sensitive function keys FB editor 2个功能键 Multi axis applications Run and stop keys configurable Online alternatives 运行和停止键(可配置) Status field 状态区 Notes: 注: Diagnostic amp parameter setting only ready 仅用于诊断和参数设定Next Application is stored in the memory module Back 应用存储在存储模块中 6 9400Servo Drives Your training set-up… Target First without engineer 你的培训设置…Engineer with single drive basics of TA 2x 9400 HighLine Single Drive type 1(2个9400HighLine Structured project 单驱动型1) further TA – Extension module Ethernet (扩展模块-以太网) FB editor – Memory module MM330 (存储模块-MM330)Multiaxis applications – Safety module SM0 (安全模块-SM0) Online alternatives –Firmware version 01.51.01 (固件版本01.51.01) 2x Motor MCS06C41 with resolverand tooth wheel(2个伺服电机带旋变和齿型轮) – left Z 72 and 32 (左Z72,32)– right Z 60 and 20 (右Z60,20) Belt 皮带– left L 600 mm Z 120(左L600mm;Z120) Next – right L 535 mm Z 107 (右L535mm;Z107) Back Active application:“Actuator –speed“ (激活应用 Actuator 7 – speed) 9400 ServoDrives Exercise 1:Detect the drive status Target First without engineer by means of LEDs and keypad 通过指示灯和面板检测驱动器状态 Engineer with single drive basics of TA 1. Switch on the supply voltages 24 V and 400 V Structured project 电源上电further TA FB editor 2.Make the left drive rotate:运转左侧驱动器 Multi axis applicationsRFR Controllerenable Reglerfreigabe控制器使能 Online alternatives DI1 Deactivation of quick stop 快停取消 DI2 Start 启动 AI1 Speed setpoint 速度设定 3. Switch off the 400 Vsupply voltage 切断400V电源 4. Find out the drive status by means of the LEDs and the keypad 通过指示灯和面板观察状态 5. Make the logbook being displayed at the keypad Next 对面板显示进行记录 Back 8 9400 Servo Drives Start assistant 启动助手Target First without engineer Engineer with single drive basics of TA Structured projectfurther TA FB editor Multi axis applications Online alternatives Next Back 9 9400 Servo Drives User interface 用户界面 Target First without engineer Engineer with single drive basics of TA Work space Structured project 工作区 further TA Menu bar 菜单栏FB editor Tool bar Multi axis applications 工具栏 Onlinealternatives View bar 浏览栏Project tree 工程树 ready Next Back Messages and monitor panel 信息和监视盘 109400 Servo Drives Target First without engineer Going online 在线连接 Engineer withsingle drive basics of TA Diagnostic adapter 诊断适配器 Structured project further TACAN FB editor Ethernet TCP/IP 以太网 Multi axis applications Online alternatives Point-to-point- connection 点对点连接 ready Next 10-pole special cable Back RJ69 10芯RJ69电缆 11 9400 Servo Drives How to go online 如何连接 Target First withoutengineer Engineer with single drive basics of TA 1. Select the channel of communication 选择通讯通道 Structured project further TA FBeditor Multi axis applications 2. Start the search for devices 搜索驱动器 Online alternatives 3. Confirm the detected device 确认检测到的设备 4. Connect 连接 ready Next Back 12 9400 Servo Drives Colour represents online 在线的颜色表示 Target First without engineer Engineer with single drive basics of TA Value in the Structured project work space:工作区的颜色 further TAyellow modifiable FB editor Multi axis applications 黄可修改 Online alternativesgrey yellow read only 土黄只读 red communication error 红通讯错误NextBack 13 9400 Servo Drives Exercise 2: Detect the drive status Target First without engineer by means of the engineer 通过engineer检测驱动器状态 Engineer with singledrive basics of TA 1. Start the L-force Engineer. 启动 Structured project further TA 2.Create a new project by going online via diagnostic adapters and uploading the data fromthe right drive FB editor controller. Name the project “P ractical intro“. 创建一个新工Multi axis applications 程,并通过诊断电缆从右侧的驱动器上载数据,命名为”Practical Online alternatives intro” 3. Open the project tree. Click on the drive controller. Evaluate the drive status by means of the tab “Diagnostics”. 打开工程树,点击控制器,通过“Diagnostics”栏监控驱动器状态 4. Adapt the monitor window: Showthe “Device utilisation Ixt” as a log with a suitable resolution.观察设备利用率“Deviceutilisation Ixt”是否合适 Next 5. Save your project. 保存工程 Back 14 9400 ServoDrives Solution: Detect the drive status检测驱动器状态 Target First without engineerEngineer with single drive basics of TA Structured project further TA FB editor Multi axis applications Online alternatives Next Back 15 9400 Servo Drives Applications Target 应用 First without engineer Engineer with single drive basics of TA Application configured function of one device Structured project further TA 应用单个驱动器配置的功能 FB editor Multi axis applications How can applications be created如何建立应用, Online alternatives Two possible solutions:两个可能的方法: 1. Modify or extenda prefabricated technology application supplied by Lenze 修改和扩展伦茨预先提供的技术应用 2. Create the application completely by yourself insert “No Application” or just don’t insert any application. The empty application can be edited then within the function block editor 完全由用户自己创建(插入“No Application” 或不插入任何ready Next 应用,可以用功能块编辑器在空应用上编辑) Back 16 9400 Servo DrivesApplications supplied by Lenze…伦茨提供的应 Target First without engineer 用Engineer with single drive basics of TA are called technology applications e. g.我们称作“TA”,如: Structured project further TA – Actua.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ke
Kt
Ls
Rs
Fn
Cos
Un
Jm
M
MPS0302203
139.21
2.3
59.2
41.3
133
0.85
371
0.08
3.2
MPS0302503
63.55
1.05
12
8.56
240
0.88
348
0.08
3.2
V/krpm
Nm/A
mH
Ohm
Hz
Vac
mkgm2
kg
IP 65 65
7
Technical data
Code
MPS T
3
Feedback Accessories
/Accessories fields
B
/ Brake
I
/ Lip seal
T
/ Terminals box
W KTY84-130
Y:
/ Cylindrical without keyway
Z:
/ No accessories
/Feedback
Thermal protection
KTY 83-110 + PTC linear probe.
Bearings
Heavy duty, life lubricated;
Balancing
Grade R (reduced tolerance).
Concentricity and squareness of mounting flange
Content
MPS
Content MPS Servo Motor
Specification of standard models
2
Code
3
Feedback and Accessories
4
Summary
5
Technical Data
6
Torque Characteristics
14
Safety brake specification
connection, no brake
4
Summary
Summary
Frame Size 03 05
07
Model number
MPS0301203 MPS0301603 MPS0302203 MPS0302503 MPS0304203 MPST0503403 MPST0506303 MPS0503203 MPS0503403 MPS0505203 MPS0505403 MPS0506203 MPS0506403 MPS0710403 MPS0720303 MPS0730203 MPS0730303 MPS0740203 MPS0740303
L 167.4 167.4
Mn
MPS0302203
2.04
MPS0302503
1.5
Nm
Mo
Mmax
Nn
Nmax
Io
In
Imax
Pn
Pole
2.48
13.86
1995
2500
1.19
0.98
7.10
0.43
8
2.2
4.2
3600
5000
2.25
1.53
4.00
0.57
8
Nm
Nm
RPM
RPM
A
A
A
kW
Any.
Mounting
Flanged B5.
Stray capacitance to ground
Minimized EMC impact.
Protection Class
IP 65
Color
RAL9005(Black)
Motor Series Synchronous servo Short series motor Frame size Locked rotor torque Rated speed Rated voltage 3) 380V/440Vac Feedback Accessories fields (Optional)
N° 4-6
75
75
+0.012 60j6( ) -0.007 +0.008 14j6( ) -0.003 M5 116.5 77 75
Grade R (reduced tolerance) according to IEC 72-DIN 0530.
Shaft
Keyway on shaft
Cable connection type
Plug connections
Cooling
Natural convection IC0041;
Working position
MPS Servo motor
Servo motor
General data
Байду номын сангаасMPS
MPS
/
/
MPS 72/23/CEE
EC .
IEC 72/1,34/1 34/5 34/11 EN 60034-1 +VAR A1+ VAR A2 EN60529,EN50262,CEE73/23
MPS series servo motors was conceived and designed as an advanced and homogeneous range of high performance servo actuators, in line with the evolving demands of the automation industry, and particularly suited for direct drive applications.
14
A 0.018
0.04 A
221.4
Mn
MPS0304203
4.18
Nm
Mo
Mmax
Nn
Nmax
Io
In
Imax
Pn
Pole
5.2
27.7
1995
2500
2.36
2.00
14.21
0.87
8
Nm
Nm
RPM
RPM
A
A
A
kW
Ke
Kt
Ls
Rs
Fn
Cos
Un
Jm
M
IP
MPS0304203
138.61
2.29
Signal connector
270° Rotatable connectors
60.5 35
Power connector
N° 4-6
M3
4 Optional key: 5X5X20
30 2.5
0.04 A 8
75 75
+0.012 60j6( ) -0.007 +0.008 14j6( ) -0.003 M5 116.5 77 75
2.
/ Motor Type MPS 0503403RZ
400V, 3Nm, 4005r/min
,
, KTY83-110,
,
Configure: Synchronous servo motor 400V, 3Nm, 4005r/min, reslover, KTY83-110, key connection, plug
Un
Jm
M
IP
MPS0301203
139.21
2.3
118.34
120.8
133
0.67
370
0.07
2.8
65
MPS0301603
40.5
0.67
10.5
10.3
400
0.88
371
0.07
2.8
65
V/krpm
Nm/A
mH
Ohm
Hz
Vac
mkgm2
kg
6
Technical data
Model MPS0302203 MPS0302503
MPS series servo motors reach the highest torque/size and power/size ratios in the industry. MPS series servo motors afford the best motion uniformity even at the lowest speed. With these features, the limits of mechanical transmissions are overcome and a vast range of applications can be transferred to direct drive technology.
16
Connection diagram
17
Specification of standard models
DIN0530 F DIN0530 H
PWM
KTY 83-110 + PTC
R
)
IEC 72-DIN 0530 R
IC0041
B5 EMC
IP 65 RAL9005
2
Type
Brushless PM AC servomotors, low inertia, high angular stiffness.
5 5.3 6 6.80
Mass kg
2.8 2.8 3.2 3.2 4.0 1.8 3.1 12.2 12.2 12.6 12.6 13.9 13.9 8.5 12.7 16.9 16.9 21.1 21.1