基于ARM的GPS接收机的设计.
基于ARM处理器的GPS导航系统设计报告
基于ARM处理器的GPS导航系统设计报告一.引言随着我国经济水平的快速发展,汽车行业也蓬勃发展起来。
汽车的增长速度远远超过公路的增长速度,汽车拥有量的急剧增加和城市现代化交通建设的相对滞后导致城市交通情况不断恶化。
同时,现代物流对运输车辆和货物安全与准时调运的要求、公交与出租车的运营管理、大型的企事业单位日常车辆管理也都对车辆的监控与导航有迫切的需求。
面且随着旅游行业的发展,人们急需要一种可以随时随地知道自己方位和目的地的方便设备。
GPS(全球定位系统)具有全球、全天候工作,定位精度高,功能多,应用广的特点,通过GPS 接收机可以实现精确的自主定位,这为实现车辆的定位和导航奠定了基础。
伴随ARM处理器、嵌入式操作系统、路径优化控制算法和GPS网络的成熟,车辆定位导航系统有了新的发展,可以在短时间内实现定位和最优路径导航。
本项目在信息系统终端的设计中采用了ARM处理器和嵌入式操作系统uC/OS-II作为开发平台,通过采用ARM处理器可达到最大为60MHz的CPU操作频率,使得数据处理能力大大加强,同时,基于嵌入式操作系统uC/OS-II开发设计的软件具备了很强的扩展性和稳定性。
二.方案简介1.功能简介该嵌入式GPS导航系统由GPS系统获得当时所在的位置的经纬度,通过换算和地图匹配在地图上得到当时的实际位置,然后由用户输入目的地,通过A*最短路径算法计算最短路径并在矢量地图上显示,同时提取GPS提供的速度,时间等信息显示在屏幕上。
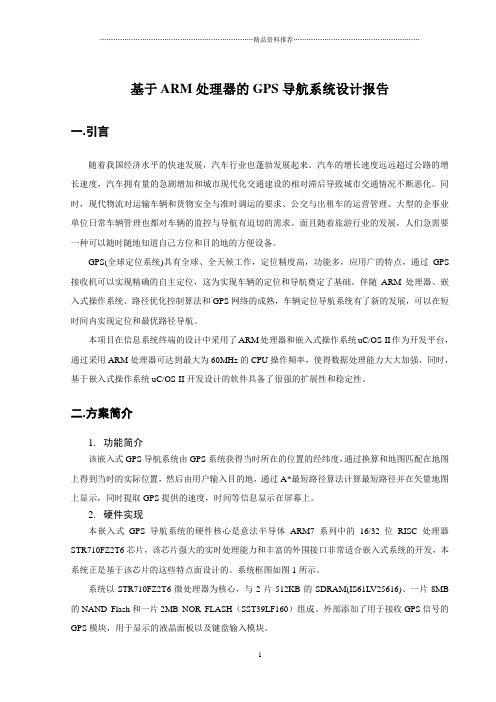
2.硬件实现本嵌入式GPS导航系统的硬件核心是意法半导体ARM7系列中的16/32位RISC处理器STR710FZ2T6芯片,该芯片强大的实时处理能力和丰富的外围接口非常适合嵌入式系统的开发,本系统正是基于该芯片的这些特点面设计的。
系统框图如图1所示。
系统以STR710FZ2T6微处理器为核心,与2片512KB的SDRAM(IS61LV25616)、一片8MB 的NAND Flash和一片2MB NOR FLASH(SST39LF160)组成。
基于ARM处理器的GPS导航系统设计报告.

基于ARM处理器的GPS导航系统设计报告姓名:班级:学号:基于ARM处理器的GPS导航系统设计报告一、需求分析1、问题的提出随着我国经济水平和时代的快速发展,汽车行业也蓬勃发展起来。
汽车的增长速度远远超过公路的增长速度,汽车拥有量的急剧增加和城市现代化交通建设的相对滞后导致城市交通情况不断恶化。
同时,现代物流对运输车辆和货物安全与准时调运的要求、公交与出租车的运营管理、大型的企事业单位日常车辆管理也都对车辆的监控与导航有迫切的需求。
面且随着旅游行业的发展,人们急需要一种可以随时随地知道自己方位和目的地的方便设备。
2.、可行性的分析GPS(全球定位系统)具有全球、全天候工作,定位精度高,功能多,应用广的特点,通过GPS接收机可以实现精确的自主定位,这为实现车辆的定位和导航奠定了基础。
伴随ARM处理器、嵌入式操作系统、路径优化控制算法和GPS网络的成熟,车辆定位导航系统有了新的发展,可以在短时间内实现定位和最优路径导航。
本项目在信息系统终端的设计中采用了ARM处理器和嵌入式操作系统uC/OS-II (专门为计算机的嵌入式应用设计的,绝大部分代码是用C语言编写的。
)作为开发平台,通过采用ARM处理器可达到最大为60MHz的CPU操作频率,使得数据处理能力大大加强,同时,基于嵌入式操作系统uC/OS-II开发设计的软件具备了很强的扩展性和稳定性。
二.规格说明二、规格说明该嵌入式GPS导航系统由GPS系统获得当时所在的位置的经纬度,通过换算和地图匹配在地图上得到当时的实际位置,然后由用户输入目的地,通过最短路径算法计算最短路径并在矢量地图上显示,同时提取GPS提供的速度,时间等信息显示在屏幕上。
1.需要采用的设备本嵌入式GPS导航系统的硬件核心是意法半导体ARM7系列中的16/32位RISC 处理器STR710FZ2T6芯片,该芯片强大的实时处理能力和丰富的外围接口非常适合嵌入式系统的开发,本系统正是基于该芯片的这些特点面设计的。
基于ARM的GPS测量数据接收系统的设计与实现
基于ARM的GPS测量数据接收系统的设计与实现中文摘要目前GPS已经在生产、生活等领域得到广泛地应用。
GPS不仅能够提供接收机的三维位置信息,而且随着电子技术的发展其测量的精度得到很大的提高,使得GPS 在现代测绘工作中发挥着重要作用。
本文研究的设备用于高精度地理位置信息的测量,设备要求测量时间45分钟以上,测量距离10公里以内的两个点之间相对精度能够达到毫米级,该设备可应用于地质勘探、测绘等方面。
GPS经过多年的发展,已向多媒体、高精度、实时性等方向发展。
嵌入式ARM 具有功能强、功耗低、先进的嵌入式操作系统等优点,能够满足GPS的发展要求,因此ARM与GPS相结合成为现代GPS设备的发展趋势。
本课题基于地质勘探与测绘对地理位置信息的需要,分析了当前基于单片机系统的GPS在测绘工作中的局限性,分析了ARM的功能及特点,设计了基于ARM的GPS 测量数据接收系统。
本文从系统组成、前端数据采集原理、方法到采集数据后的数据分析、计算、结果评定等方面进行了详细的阐述,给出了系统各组成部分的电路原理图及系统控制软件说明等,为测试的工程化做了有益的尝试。
本文以高性能32位ARM9处理器S3C2440A为核心,以ALLSTAR测量型GPS芯片为数据来源,搭建了适用于GPS数据采集的硬件系统。
详细分析了系统的工作原理及其具体电路。
在这个硬件系统的基础上采用 5作为操作系统,进行了系统软件工作流程的设计工作。
本文使用Visual Studio 2008软件开发工具,根据数据编码、通信及存储原理编写了主机数据采集程序,然后根据GPS定位原理及计算技术编写了数据分析软件。
该系统的研究开发工作是在实践的基础上完成的,充分利用了S3C2440A芯片提供的资源,具有高性能、高可靠性、低功耗、低成本的优点,在数据采集速度、稳定性、存储空间等方面都有较大提高,对提高测绘工作的质量具有较高的实用价值,可广泛应用于高精度地理位置信息的测量。
基于ARM的弹载双模卫星导航接收机设计与实现
基于ARM的弹载双模卫星导航接收机设计与实现
近年来,随着卫星导航技术的飞速发展,人们对于高精度、高可靠性的导航接收机的需求也越来越大。
为此,本文设计并实现了一种基于ARM的弹载双模卫星导航接收机。
本文选择了ARM作为主控芯片,主要基于其低功耗、高性能以及广泛的应用背景。
首先,通过对ARM处理器的深入研究,设计了一套稳定可靠的硬件电路,包括时钟、存储器、外设接口等。
接着,根据卫星导航技术的特点,设计了一种双模导航接收机,分别支持GPS和北斗两种导航系统。
双模设计的优势在于,不仅可以提高导航的可靠性,还可以在某些场景下提供更高的精度。
在软件方面,本文采用了嵌入式操作系统,并基于ARM架构进行优化。
通过对导航算法的深入研究和实践,本文实现了一套高效、精确的导航算法。
此外,本文还通过设计合理的用户界面,使得操作和配置导航接收机变得更加简单和直观。
为了验证设计的可行性和性能,本文进行了一系列实验。
实验结果表明,基于ARM的弹载双模卫星导航接收机具有较高的定位精度和导航可靠性。
同时,在功耗方面也有不错的表现,能够满足弹载导航接收机的要求。
综上所述,本文设计并实现了一种基于ARM的弹载双模卫星导航接收机。
通过对ARM处理器的优化和导航算法的研究,实现了高精度、高可靠性的导航功能。
该设计在弹载导航领域具有广阔的应用前景,并为相关研究提供了有益的参考。
基于ARM处理器的车载GPS系统设计方案
基于ARM处理器的车载GPS系统设计方案1 引言车载GPS定位终端在过去十年内已经成为汽车工业发展的焦点。
在欧美国家和日本,车载GPS定位终端在最近几年内得以广泛的应用。
车载GPS定位终端是融全球卫星定位技术(GPS)和现代无线通信技术于一体的高科技系统。
该终端的主要功能是通过GPS模块从卫星获取GPS数据,将移动车辆的动态位臵(经度、纬度、时间、速度)等信息实时地通过无线通信链路上传至监控中心,同时接收监控中心发送的控制命令。
目前的车辆监控系统中大多采用GSM通信网以短信息的方式进行通信,不能充分满足实际应用的需要。
而GPRS(General Packet Radio Service)通用分组无线业务是一种以分组交换技术为基础,采用IP数据网络协议的高效数据传输网络,可以弥补GSM网络的不足。
车载GPS定位终端不仅在智能交通系统中担负主要作用,同时还可以提供防盗防抢劫报警,公交车报站,物流车辆调度等多种服务。
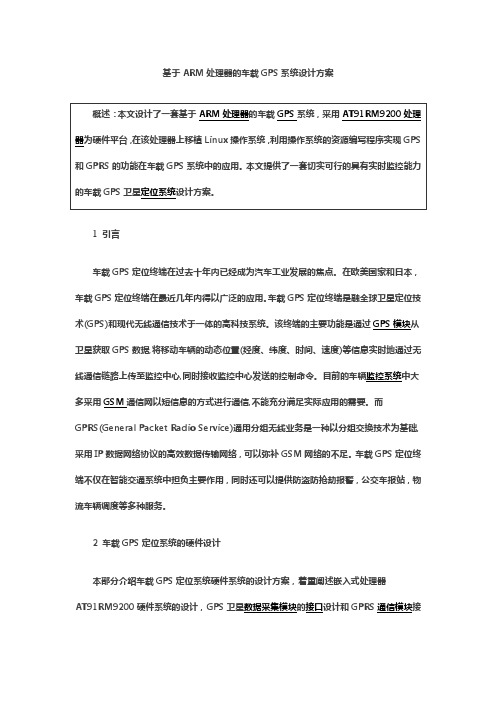
2 车载GPS定位系统的硬件设计本部分介绍车载GPS定位系统硬件系统的设计方案,着重阐述嵌入式处理器AT91RM9200硬件系统的设计,GPS卫星数据采集模块的接口设计和GPRS通信模块接口的设计。
如图1所示,车载GPS定位系统的硬件结构主要由GPRS接收模块、GPS接收模块、SDRAM,FLASH存储器模块、串口通信模块,以及外围模块组成。
图1车载GPS定位系统的硬件结构组成2.1 GPRS接收模块电路设计GPRS模块负责主电路板与监控中心的通信任务,它将处理好了的GPS数据通过网络发送给监控中心,并接收监控中心发送给主电路板的控制命令,该模块直接影响到这个车载终端的实际使用效果。
本系统选用的GPRS模块是由索尼爱立信公司推出的GR47模块,该模块的主要特点是内臵TCP/TP协议栈。
它允许一个TCP/UDP传输机制以最小的前期配臵和操作来被使用。
其内嵌控制器方便集成客户的应用,减少外部控制器的需求。
基于ARM+FPGA的GPS接收机设计
1 接 收 机 的 组成
接收机的组成可 以按 照功能划 分为两部 分 : 射频部 分 和基带处理部分 。射频部分主要 是完成 G S信号 的接 收、 P 下变频及采样 的功能 。基 带处 理部 分 主要是完 成 G S信 P
p roma c s2 0 m/ . h e ev rc n a h e e h g y a c n vg t n a d p st n n . th s s l sz ,o e r n e i 0 0 s T e r c ie a c iv ih d n mi a ia i n o i o i g I a mal ie lw f o i
d sg x li e ,n l d n e c p u e e g n ,r c ig e g n , e d lt n me s g s a d p st n r s l t n e in i e p a n d i cu i g t a tr n i e ta k n n i e d mo u a i s a e , n o i o e ou i . s h o i o
T ruht e etter e e ’ oioigpeio s6 1 gt e / m (a t e ,n h ya i hog ef l ts, e i r Sp si n rcs n i m(o i d ) 8 h id h cv tn i n u 1i d ) ad t d nmc tu e
接收机 的射频前端 采用 G 2 1 片 , 带处理部 分采用 A M P 0 5芯 基 R 9内核 的 A 9 S M 2 1芯片 和 C c n I T 1A 96 yl eI o 系列 的 E 2 7F 71 P C 0 628芯片 。同时 阐述来接收机的软件设计 , 括捕获 引擎 、 包 跟踪 引擎 、 解凋 电文 , 位解 定 算等 。该接收机通过现场实验定位精度为 6 经度 ) 8 纬度 ) 动态性 能达 2 0 m s可 以实现 高动态 m( / m( , 00 /, 导航定位 , 同时体 积小 , 功耗低 。
基于arm的GPS导航定位系统设计
基于arm的GPS导航定位系统设计江苏科技大学本科毕业设计(论文)基于ARM的GPS导航定位系统设计ARM-based GPS navigation system design摘要GPS(全球定位系统)是一种全方位的实时定位技术,随着GPS技术的发展,以ARM处理器作为主CPU的嵌入式硬件平台几乎已经成为信息产业的硬件标准。
一方面,它具有体积小、性能强、功耗低、可靠性高等特点;另一方面,它为高速、稳定地运行嵌入式操作系统提供了硬件基础。
本文以Windows CE为嵌入式操作系统,对基于ARM的GPS 定位系统的开发进行了研究与实现。
硬件平台设计以三星公司的ARM920T核的S3C2410为微处理器,对以下三个方面的技术进行了研究:一是对GPS及嵌入式技术进行了介绍,介绍了GPS技术原理、特点、和定位方式;二是搭建基于ARM的硬件平台,对电源电路,存储电路等进行了设计;三是对GPS模块及通讯接口进行了设计。
关键字:GPS ARM Windows CE操作系统AbstractGPS (Global Positioning System) is a comprehensive real-time positioning technology, with GPS technology to ARM processor as the main CPU of the embedded hardware platform has almost become the information industry hardware standards.On the one hand ,it has a small,strong performance,low power,high reliabity:on the other hand,it is high speed,stable operation and provides a hardware based embedded operatingsystem.In this paper, Windows CE embedded operating system, ARM-based GPS positioning system and implementation of development studied.Platform designed to Samsung S3C2410 ARM920T microprocessor core, on the following three techniques were studied: one on the GPS and embedded technologies are introduced, introduced the principle of GPS technology, features, and positioning means ; Second, ARM-based hardware platform built on the power supply circuit, memory circuit design, etc.; Third, GPS module and the communication interface is designed.Keywords: GPS ARM Windows CE Operation System目录第一章绪论 01.1嵌入式技术研究背景 01.2GPS技术研究背景 (1)第二章 GPS技术基本原理 (2)2.1GPS基本原理 (2)卫星的位置 (2)卫星与用户间的相对距离 (3)卫星信号的解算 (3)的定位方式 (4)2.2GPS发展前景 (5)第三章嵌入式系统设计 (7)3.1嵌入式系统 (7)3.2W INDOWS CE嵌入式操作系统 (7)3.3W INDOWS CE系统框架 (8)3.4嵌入式软件平台开发 (9)开发 (9)开发 (10)3.5ARM技术介绍 (12)处理器的体系结构 (12)微处理器概述 (13)第四章系统硬件及GPS模块设计 (14)4.1总体硬件设计方案 (14)系统硬件的选择 (14)处理器 (15)4.2系统硬件电路设计 (15)电源电路 (18)串口电路 (19)电路 (19)电路 (21)显示电路 (21)4.3GPS模块电路设计 (23)模块选择 (23)模块与主机的串口通信 (23)第五章系统软件设计 (25)5.1NEMA0183协议 (25)5.2GPS程序设计 (25)5.3用户界面 (30)总结 (32)致谢 (33)参考文献 (34)附录 (35)第一章绪论1.1 嵌入式技术研究背景随着计算机和通信技术的快速发展,嵌入式系统己经广泛渗透到人们的工作、生活中,从家用电器、手持通讯设备、信息终端、仪器仪表到汽车、军事装备、制造工业、过程控制等。
基于ARM的无人车GPS导航系统的设计与实现

基于ARM的无人车GPS导航系统设计与实现
各模块之间的连接和互动关系如下:ARM微控制器作为主控单元,负责接收 GPS模块、车速传感器和方向传感器的数据,进行处理后通过串口通信将控制信 号发送给车辆控制系统。同时,微控制器还将车辆状态信息和定位信息显示在液 晶显示屏上,方便驾驶员或控制中心进行监控。
基于ARM的无人车GPS导航系统 的设计与实现
基于ARM的无人车GPS导航系统设 计与实现
基于ARM的无人车GPS导航系统设计与实现
随着科技的快速发展,无人驾驶汽车已成为人们的焦点。而GPS导航系统作为 无人驾驶汽车的重要组成部分,为车辆的精确控制和路径规划提供了基础。本次 演示将基于ARM(Advanced RISC Machines)架构,探讨无人车GPS导航系统的 设计与实现。
基本内容
同时,为了提高自主导航的可靠性和鲁棒性,可以采用滤波算法(如卡尔曼 滤波算法)对定位信息进行处理和分析,以提高定位信息的准确性和可信度。
基本内容
对于系统测试与结果验证,通常需要进行以下步骤: 1、测试场景设计:为了测试无人驾驶车GPS自主导航系统的性能,需要设计 不同的测试场景,包括城市道路、高速公路、隧道、桥梁等多种路况和环境,以 检验系统的全方位性能。
基本内容
在具体应用中,可以根据实际需求选择合适的定位技术。 2.地图构建:无人 驾驶车GPS自主导航系统需要构建高精度地图,以便于导航控制器根据地图信息 计算出车辆应该行驶的路径。地图构建主要包括地图数据的采集、处理和存储。 地图数据可以来源于现有的地图数据商,也可以通过自身采集数据进行构建。在 地图构建过程中,需要考虑实时地图更新问题,以保证地图信息的准确性和实时 性。
具体硬件设计包括电路连接和硬件模块的选型。首先,我们需要搭建一个包 括GPS模块、车速传感器、方向传感器等硬件的电路板,并使用ARM微控制器对其 进行控制。其中,GPS模块负责获取经纬度信息,车速传感器和方向传感器则分 别检测车辆的速度和方向。此外,为方便调试和程序下载,还需选用一款具有串 口通信功能的液晶显示屏。
基于ARM的静态测量型GPS接收机设计.

基于ARM的静态测量型GPS接收机设计全球卫星定位导航系统(GPS)是随着现代科学技术的迅速发展而建立起来的以接收导航卫星信号为基础的非自主式导航定位系统,该系统最初只用于军方,向民用开放后快速渗透到各行各业。
自上世纪80年代引入我国以来的使用表明,GPS定位技术以观测站间无需通视、测量组人员投入少等优势,给测绘领域带来了一场深刻的技术革命。
GPS技术在地球物理勘探中的应用是其一个重要的应用领域。
地球物理勘探野外工作,在进行地球物理场测量的同时,须进行点位及其高程测量,GPS技术相对传统测地方法而言具有高精度及高效率的优势,使用更方便。
对于地球物理勘探,一般要求水平高程精度都在1米左右,而重力勘探要求高程定位精度在厘米级水平。
对于现有单机定位精度为3~5米手持型GPS接收机而言,精度常常不能满足要求;而重力勘探的测地工作中一般需要使用双频差分GPS技术,仪器价格昂贵。
而且,市场上还没有专门为满足物探工作需要设计的低成本GPS接收机产品。
专业级的差分GPS接收机的测量基线长度一般要求达到数十公里,而工程地球物理勘察及其他相关应用往往并不需要达到如此大的测量范围。
本论文以设计低成本、用于短基线测量的较高精度的差分GPS接收机为目标。
出于野外工作效率的考虑,提出在测量基线长度不超过3km,观测时间不超过10分钟的前提下,以ARM微处理器为系统控制器,采用快速静态差分技术,获得平面定位及高程测定精度达到厘米级水平设计要求。
将ARM嵌入式技术与GPS技术相结合,充分发挥ARM微处理器功耗低、体积小、功能多等特点,利用ARM微处理器配合合适的GPS-OEM模块,开发适用于物探专业需求的GPS接收机具有重要的实用意义。
本文正是从这种思想出发,设计开发基于GPS-OEM板的静态测量型GPS接收机。
本文首先提出了静态差分测量型GPS接收机的总体设计方案,接下来重点阐述了系统的设计方法,系统设计分为硬件部分和软件部分。
基于ARM9嵌入式GPS定位系统

该算法利用神经网络对地图进行训练,得到地图特征与GPS数据的映射关系, 从而获得更精确的定位结果。此外,我们还开发了上位机软件,方便用户对系统 进行管理和监控。
系统测试与结果分析
为了验证本系统的可靠性和有效性,我们进行了大量的实验测试。首先,我 们对系统的硬件进行了测试,包括GPS接收器的定位精度、数据传输速度等指标。 其次,我们对系统的软件进行了测试,包括地图匹配算法的精度、运行时间等指 标。
实验结果表明,本系统的硬件和软件均具有较高的性能和可靠性,能够满足 实际应用的需求。同时,我们也发现了一些问题,如地图数据的精度不够高、神 经网络的训练时间较长等,这些问题需要进一步加以改进和完善。
结论与展望
本次演示研究和实现了一种基于ARM嵌入式系统的GPS地图匹配系统。该系统 利用ARM嵌入式处理器作为主控芯片,采用了一种基于的地图匹配算法,获得了 较高的定位精度。该系统还具有体积小、功耗低、成本低等优点,具有广泛的应 用前景。
具有广泛的应用前景。未来发展方向可以包括提高定位精度、优化功耗控制、 拓展多模态定位技术等方面。
参考内容
引言
随着全球定位系统(GPS)的普及,基于GPS的技术在各个领域得到了广泛的 应用。在嵌入式系统中,GPS地图匹配技术具有重要的意义和作用,它可以将GPS 定位数据与地图数据库进行匹配,得到更精确的定位结果,提高导航和定位的精 度。
GPS地图匹配技术可分为基于规则的匹配、基于特征的匹配和基于人工智能 的匹配等。其中,基于人工智能的匹配方法具有自适应性、鲁棒性和高精度等优 点,是未来的研究趋势。
系统设计
基于ARM嵌入式系统的GPS地图匹配系统主要包括硬件和软件两部分。在硬件 方面,我们选择了一款低功耗、高性能的ARM嵌入式处理器作为主控芯片,并配 备了高精度的GPS接收器和Flash存储器。在软件方面,我们采用了一种基于人工 智能的地图匹配算法,
基于ARM的GPS定位系统设计的开题报告

基于ARM的GPS定位系统设计的开题报告一、选题依据随着智能手机、车载电脑等智能设备的普及,GPS定位技术得到了广泛的应用。
基于ARM的GPS定位系统,是一款能够实现定位功能的智能设备,具有高效、低功耗的特点。
目前,市场上已经有不少GPS定位系统产品,但是在细节上还有很多可以改进的地方。
因此,设计一款基于ARM的GPS定位系统,无疑是具有很大的市场潜力和开发前景的。
二、研究目的本设计的目的是通过开发一款基于ARM的GPS定位系统,解决市场上已有产品在使用过程中存在的不足之处,从而提高GPS定位系统的性能、实用性和稳定性。
三、研究内容(1)GPS定位技术的原理与应用。
研究GPS定位技术的基本原理,了解GPS定位技术在实际应用中的操作流程。
(2)ARM处理器的原理与应用。
研究ARM处理器的架构,了解ARM处理器在各种应用中的优势和局限性。
(3)GPS定位系统的硬件设计。
设计GPS定位系统的硬件部分,包括GPS接收器、ARM处理器、存储器、显示器等。
(4)GPS定位系统的软件设计。
设计GPS定位系统的软件部分,包括GPS定位算法、数据存储与处理、图形界面等。
(5)GPS定位系统的测试与实验。
对设计的GPS定位系统进行测试和实验,验证其性能和稳定性。
四、研究意义(1)基于ARM的GPS定位系统将能够满足人们对定位功能的需求,提高其实用性和便捷性,实现更精准的定位。
(2)本设计的研究结果能够为现有的GPS定位系统技术提供一个完善和优化的方案,从而使GPS定位技术在各个领域得到更广泛的应用。
(3)研究GPS定位系统,不仅为我们深入了解GPS定位技术的原理提供了一个机会,也有利于我们提升对GPS定位技术的理论研究和应用开发能力。
五、研究方法(1)文献调研法。
对GPS定位技术、ARM处理器等相关领域的基础理论和实际应用进行系统分析和综合研究。
(2)实验法。
通过搭建GPS定位系统的硬件和软件平台,对系统进行测试和实验,验证与改进设计的正确性和实用性。
基于ARM的静态测量型GPS接收机设计的开题报告

基于ARM的静态测量型GPS接收机设计的开题报告一、研究背景及研究目的全球定位系统(GPS)接收机是测量地球上位置的重要设备,广泛用于导航、军事、航空、农业、气象等领域。
近年来,随着科技的发展和应用场景的不断扩大,对GPS接收机的要求也越来越高,尤其是对精度、灵敏度、低功耗等方面的提升。
在这种背景下,静态测量型GPS接收机成为了人们密切关注的研究领域。
静态测量型GPS接收机在传统意义上的定义是指在接收GPS信号的同时,不进行任何位置变动,而是将接收到的GPS信号进行处理,从而测量出接收机所处的精确位置。
在实际应用中,静态测量型GPS接收机通常用于地形测量、地质勘探、建筑测量、边坡监测等领域。
这种类型的GPS接收机相较于动态GPS接收机,其测量精度更高,信号处理更为复杂。
本论文旨在基于ARM平台设计一种高精度、低功耗的静态测量型GPS接收机,其主要研究内容如下:(1)研究现有静态测量型GPS接收机的性能指标,确定设计需求。
(2)设计GPS信号前端接收模块,实现对信号的可靠采集。
(3)设计数据处理模块,实现对信号的码伪距解算和位置解算。
(4)调试与测试,验证设计的GPS接收机的性能和可靠性。
二、研究内容与重点1、研究现有GPS接收机的性能指标,掌握静态测量型GPS接收机的处理方式、信号采集、数据处理等方面的关键技术。
2、设计GPS信号前端接收模块,选用合适的硬件设备,实现对GPS信号的可靠采集。
3、设计数据处理模块,包括信号的码伪距解算和位置解算等处理算法,选择合适的算法进行处理。
4、设计低功耗的系统架构,解决长时间运行时的能耗问题。
三、预期成果1、设计一种基于ARM平台的静态测量型GPS接收机,并验证其正确性和可靠性。
2、通过对GPS接收机接收到的信号进行处理,验证系统的精度、稳定性和低功耗等性能指标。
3、撰写本论文,对GPS接收机进行全面的研究,并提出今后进一步改进的实施方案。
四、研究方法与论文组织结构1、研究方法:本研究将以文献资料收集、系统设计与仿真、实验测试与数据分析等方法进行。
基于ARM核的GPS接收机的设计

文章编号:1002-8692(2006)04-0038-03基于ARM核的GPS接收机的设计*黄勋,唐慧强,陶益凡(南京信息工程大学信息与通信系,江苏南京210044)【摘要】介绍了GPS接收机的原理以及一款GPS接收机的实际设计。
该GPS接收机采用Zarlink公司生产的GP2015芯片作为接收机的射频前端,内嵌ARM7核的GP4020芯片作为接收机的数字基带处理器,并阐述了外围扩展电路及软件设计。
该GPS接收机消除了以往处理器数据处理的瓶颈效应,体积小,功耗低。
【关键词】GPS接收机;GP2015芯片;ARM技术;GP4020芯片【中图分类号】P228.4【文献标识码】BDesignofaGPSReceiverBasedonARMHUANGXun,TANGHui-qiang,TAOYi-fan(Depart.ofInformation&CommunicationofNanjingInformationScience&TechnologyUniversity,Nanjing210044,China)【Abstract】ThispaperintroducesthestructureanddesignoftheGPSreceiver.Basedonthearchitecture,thehardwareandsoft-waredesignofakindofGPSreceiverarecompleted.ForGPSreceiver,theGP2015(manufacturedbyZarlink)isasmallformatFront-endandtheGP4020withanARM7microprocessorisacompletedigitalbasebandprocessor.【Keywords】GPSreceiver;GP2015;ARM;GP4020・实用设计・1引言作为一种成熟的卫星导航系统,GPS(全球定位系统)技术已被应用在各行各业中。
基于ARM的GPS_GPRS多功能手持终端的设计与实现
基于ARM的GPS/GPRS多功能手持终端的设计与实现O引言GPS/GPRS多功能手持终端是体积小巧、携带方便、可独立使用的全天候实时定位导航设备。
它不仅能够为野外工作人员进行地图测绘、物探测量等工作提供帮助,还能够在登山探险、旅游等活动中给人们提供方便;在智能交通领域,能对车辆/船只进行监控、调配,避免或减少事故的发生,提高交通效率[“。
因此GPS/GPRS多功能手持终端的研究成为了研究的热点。
目前国内大多数GPS手持终端功能单一,并且大多采用GSM通信网以短信息的方式进行通信,不能充分满足实际应用的需要[2]。
本文开发出一种基于ARM9微处理器和嵌入式Linux操作系统的GPS/GPRS多功能手持终端。
其特点主要体现在:体积小巧,适合手持,支持车载,具有智能手机和PDA所拥有的一些数码功能;利用GPS、地理信息系统(GIs)及通信技术能够为野外作业人员提供专业的导航与调测功能;结合监控中心,能够在全国范围内同时对多个利用无线GPRS网络上网的手持终端移动目标实现超远距离的实时控制及包含超远实时图像传输在内的多项实用功能。
手持终端将所有移动目标的实时活动数据传回监控中心,以供监控中心对移动目标进行实时监控管理、调度等。
1硬件设计GPS/GPRS多功能手持终端主要包含七大功能模块:主控模块、GPS模块、GsM /GPRs模块、人机接口、外围扩展、音频模块、电源模块。
其中,电源模块保证能源动力;主控模块调控各模块工作,协调管理系统内部模块间的正常通信;GPS模块是位置数据解算功能单元,GSM/GPRS模块主要实现终端与GsM/GPRS 网络的通信;人机接口保证用户与系统进行良好的互动;音频模块以及外围扩展实现各种数码功能。
其硬件结构如图1所示。
主控模块结合音频模块、人机接口、外围扩展实现终端的各种通用数码功能以及部分PDA功能。
主控模块将GPS模块和各种传感器获取的位置信息和数据进行处理,或进行导航、测量测绘,或将其压缩打包后传给GSM/GPRS通信模块。
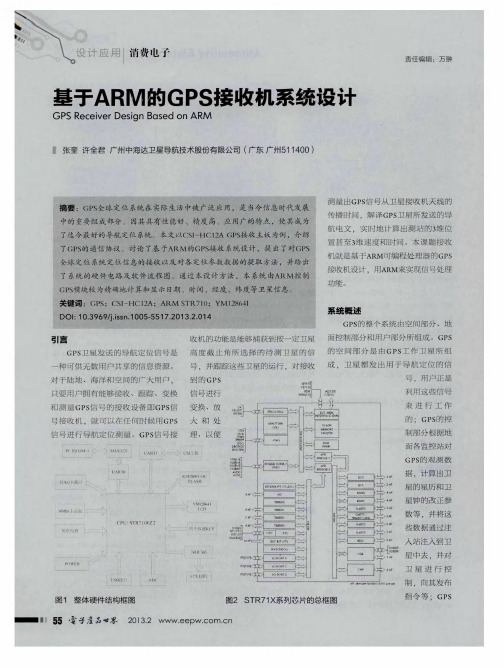
基于ARM的GPS接收机系统设计
度 ,高 度 单 位 ,大 地 水 准 面 高 度 ,高
可 靠 的 数 据 通 信 , 电路 如 图4 所 示。 显 示 电路 液 晶 显 示 是 大 多系 统 中 常 用 的 器 件 ,能 让 工 程 人 员 实 时 的 了 解 系 统 工 件情 况 及 一些 数 据 。因 为A RM器 件
S TR 7 l x F 系 列 是 含 有 嵌 入式F l a s h  ̄R A M的A R M驱 动
Ⅵ, E , 1 8 n WE 0
的1 6 / 3 2 位 微 处 理 器 , 内部 资
源框图如图2 所示 。
D7
4 4
1 2
王 , o7
V CC
RE =
S TR7 1 X与PC机接 口电路
本设 计 用MA X3 2 2 1 进 行 电 平 转 换 , 匹配 P c 和 主板 的 电 压 ,实现 正确
它 的 作 用 是 接 收 GP S  ̄ _ 星 所 发 出 的 信 经 度 ,经 度 半 球 ,定 位 质 量 指 示 ,使
号 ,利 用 这 些 信 号 进 行 导 航 定 位 等 工 用 卫 星 数 量 , 水 平 精 确 度 ,海 拔 高
S GP GGA, < 1 > J < 2 > , < 3 > J < 4 > J < 5 > J <
因此 本次 设计 通过 G P I O口通 信 ,并
没 有 采 用 总 线 驱 动 。该 电路 模 式 完成
用 户 一 股 需 要 利 用 此 导 航 信 息 来 计 算
某一 时 ̄ I J GP S 卫 星 在 地 球 轨 道 上 的 位
是 高 速 器 件 ,而 液 晶 通 常 时 序 较 慢 .
基于ARM的GPS定位系统的设计与实现
11
2.3 本章总结 ........................................................................................................... 13
12 第三章 嵌入式系统设计
13
3.1 软件平台搭建 .................................................................................................... 15
18
3.2.1 Linux 驱动程序开发流程..........................................................................25
19
3.2.2 驱动程序设计........................................................................................... 27
33 data dealer deal with the received location information , to achieve the purpose of positioning
34 the object distance .
35
GPS positioning system based on ARM bulit up the data receiver and a data dealer. The
6 好的社会效益、经济效益。
7
基于 ARM 的 GSP 定位系统,将其数据接收装置安装在待跟踪的物体上,数据接收
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ARM的GPS接收机的设计
摘要:实现了一种全集成可变带宽中频宽带低通滤波器,讨论分析了跨导放大器-电容(OTA—C)连续时间型滤波器的结构、设计和具体实现,使用外部可编程电路对所设计滤波器带宽进行控制,并利用ADS软件进行电路设计和仿真验证。
仿真结果表明,该滤波器带宽的可调范围为1~26 MHz,阻带抑制率大于35 dB,带内波纹小于0.5 dB,采用1.8 V电源,TSMC 0.18μm CMOS工艺库仿真,功耗小于21 mW,频响曲线接近理想状态。
关键词:Butte
0 引言
全球定位系统(GPS)作为一种成熟的导航定位技术,以其全天候、高精度、自动化、高效率等显著特点及所独具的定位导航、授时授频、精密测量等多方面的强大功能,使其用途越来越广泛。
传统的使用8位单片机设计的GPS接收机,在数据处理、系统性能提升以及功能扩展等方面存在较大的不足。
随着嵌入式技术的发展,以ARM为代表的32位微处理器凭借其高性能、低功耗、低成本、体积小等优点,在现实中获得了广泛的应用。
本文介绍了一种GPS接收机的整体设计方案,该方案采用Atmel公司生产的ATR0600和ATR0620芯片。
其中ATR0600芯片作为接收机的射频前端,内嵌ARM7TDMI处理器核的ATR0620芯片作为接收机的数字基带处理器。
该方案具有低功耗、高性能、尺寸小、成本低的特点。
1 GPS接收机的基本组成
GPS接收机的主要任务是跟踪可见GPS卫星,对接收到的卫星无线电信号经过数据处理后获得定位所需的测量值和导航信息,最后完成对用户的定位运算和可能的导航任务。
GPS接收机的内部结构沿其工作流程的先后顺序,通常分为射频(RF)前端处理、基带数字信号处理(DSP)和定位导航运算三大功能模块。
其基本组成如图1所示:
2 GPS接收机的硬件设计
卫星信号由天线接收,直接进入射频前端。
射频前端具有变频作用,将射频信号转换为中频信号。
中频信号经采样信号采样、量化后,转换为数字中频信号。
数字中频信号进入基带数字处理器,基带数字处理器完成卫星信号的处理后,解调出导航电文,进行相应的处理后给出所需的定位信息或提供特定的应用服务。
2.1 接收天线
接收天线是GPS接收机处理卫星信号的首个器件,它将接收到的GPS卫星所发射的电磁波信号转变成电压或电流信号,以供接收机射频前端摄取与处理。
因为GPS接收机赖以定位的信息基本上全部来自于天线接收到的GPS卫星信号,所
以接收天线的性能直接影响着整个接收机的定位性能,它对接收机所起的作用与贡献绝对不容忽视。
对GPS接收机天线的主要技术要求是:接收频率为1575.42MHz的L1信号;为了与接收到的GPS卫星信号的极化方式相匹配,从而提高接收效率,接收天线以右旋圆极化的方式工作;强度微弱的GPS卫星信号应当尽可能地先在紧靠天线的一端得到功率放大,以改善整个接收系统的噪声性能,接收机采用内置低噪声放大器(LAN)的有源天线;电线馈线的阻抗为50 。
综上所述,本文采用灵敏度高的竖直形状的四螺旋天线,且在工作时将天线采用外置的形式。
2.2 基于ATR0600的射频前端电路设计
射频(RF)前端模块位于接收机天线与基带数字信号处理模块之间,它通过天线接收所有可见GPS卫星信号,经前置滤波器和前置放大器的滤波放大后,再与本机振荡器产生的正弦波本振信号进行混频而下变频成中频(IF)信号,最后经模数(A/D)转换器将中频信号离散成包含GPS信号成分的、频率较低的数字中频信号,并在此过程中进行必要的滤波和增益控制。
本设计中射频前端主要由Atmel公司生产的ATR0600芯片及外围滤波电路构成,它是一个GPS接收机射频前端IC芯片,采用单IF结构,芯片上包含有混频器、IF放大器、2bit的模数转换器(ADC)、晶体振荡器等电路,芯片具有极高的集成度,很小的功耗(约50w)。
ATR0600通过外部的天线接收1575.42MHz的L1 GPS信号,经过低噪声放大器LNA进行第1级滤波、放大后,被外部SAW滤波器进行镜像抑制和对1800MHz GSM频带信号进行隔离。
该信号与基准频率为23.104 MHz的本振信号进行混频,混频器将GPS信号下变频到97.76MHz中频。
混频后,该信号经过LC带通滤波器和可变益放大器(VGA),与片上集成的中频带通滤波器组合,完成对GSM干扰信号的滤波。
VGA输出驱动集成的1.5bitA/D转换器,将中频信号转化成
4.35MHz的数字中频信号。
ATR0600的内部结构及其电路应用形式如图2所示:
2.3 基于ATR0620的基带处理器电路
基带数字信号处理模块是GPS接收机的核心部分,它通过处理射频前端所输出的数字中频信号,复制出与接收到的卫星信号相一致的本地载波和本地伪码信号,从而实现对GPS信号的捕获与跟踪,并且从中获得GPS伪距和载波相位等测量值以及解调出导航电文。
基带数字信号处理模块通常是硬件与软件相结合的有机体,其中载波解调和
C/A码解扩通常是由ASIC硬件形式的数字信号处理器来完成的,而在微处理器中运行的跟踪环路控制软件通过计算来调节数字信号处理器的各种操作。
由
Atmel公司生产的ATR0620 芯片包含有一个基于ARM7TDMI处理核的16通道相关器,它具有高性能的32bit RISC结构,使用16bit指令系统,能利用
ARM7TDMI微控制器核与片上RAM,完成GPS16通道相关器和外围设备接口功能;利用芯片内部大量的功能寄存器可以满足实时控制应用。
ATR0620外部接口及与ATR0600的信号连接如图3所示。
2.4 GPS接收机的电路设计
ATR0600射频前端为ATR0620提供卫星信号,主时钟信号和其它一些控制信号,而ATR0620为ATR0600提供采样信号。
图4为利用ATR0600和ATR0620芯片设计的GPS接收机方框图。
2.5 存储模块及通信接口
选用Cypress公司生产的CY7C1041,由片选信号NSCS[I]选通来扩展SRAM,容量为4 Mb。
FLASH则选用ST公司的4Mb容量的SST39VF400芯片,由片选信号NSCS[0]选通。
接收机中设计了两种通信接口:一种是JTAG调试接口,连接JTAG仿真器进行开发调试,下载用户程序;另一种是RS232通信串口,用于与主机通信。
其中JTAG调试电路连接如图5所示。
3 GPS接收机的软件设计
GPS的用户设备主要由接收机硬件和处理软件组成。
用户通过用户设备接收GPS 卫星信号,经信号处理而获得用户位置、速度等信息,最终达到利用 GPS进行导航和定位的目的。
GPS接收机软件的结构如图6所示。
程序包含两部分:汇编语言程序部分(用于引导和系统初始化)和C语言应用程序(用于主要的导航定位计算)。
软件整体采用并行任务结构,由相关器产生的累加数据IRQ中断信号进行任务切换的驱动,在中断服务程序中更新伪码、载波和数据解调环路。
GPS接收机的应用软件根据不同的用途而不同,主要包括:数据采集与分析、卫星位置计算、时间推算、差分定位和动态定位等程序。
本设计的GPS接收机上的程序主要在ARM— CLinux交叉编译环境下用C语言进行编写,通过ARM7 JTAG接口连接JAG仿真器进行调试和移植。
4 结束语
本设计的GPS接收机采用内嵌ARM7核的GP4020芯片作为接收机的数字基带处理器,通过实验调试,消除了以往微处理器的瓶颈效应,具有体积小、功耗低、性能高的特点。
实验PCB板尺寸:75 mmх50 mm xl2 mm;通道数:16;功耗:小于0.1 W;首次定位时间:小于41 s(冷启动),小于2.5s(热启动);定位精度:3 m。