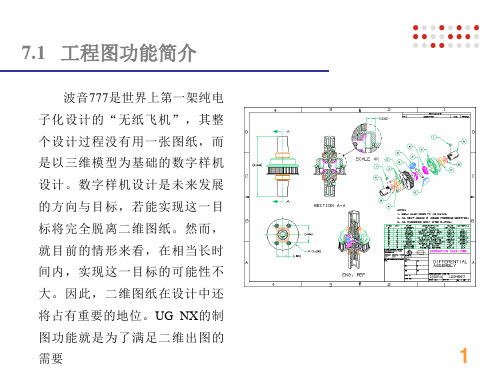
第7章 几何建模
UGNX8 基础学习 第七章
35
7.5.6
编辑组件
通过下拉菜单中的【编辑】 | 【组件】命令,可以
删除以前创建的制图对象的某些部分。可删除的组件包 括箭头、手工创建的剖面线、尺寸和延伸线等。除了删
3
7.1.3 UG出图的一般过程
利用UG生成工程图,有两种方法:
主模型方法:新建一个图纸(【新建】|【图纸】),通过引 用主模型(三维模型)生成工程图文件。
非主模型方法:在建模环境中,通过选择【制图】命令切换 到【制图】环境,然后定义工程图。
这两种方法在具体绘制工程图时的步骤和过程是一样的。
4
7.1.3 UG出图的一般过程
17
7.3.4 删除工程图纸
删除工程图纸的方法大致有2种:
在部件导航器中,在所需的图纸名称上右击,系统弹 出快捷菜单,选择【删除】。
将光标放置在图纸边界虚线部分,当虚线变为红色, 右键单击,在弹出的快捷菜单中选择【删除】。
18
7.4 视图的创建
视图是二维工程图最基本也是最重要的组成部分,在一个工 程图中可以包含多种视图,通过这些视图的组合可以来描述三维 实体模型。 如下图所示,【图纸】工具条上包含了创建视图的所有命令。 另外,通过下拉菜单中的【插入】|【视图】下的子命令也可以创 建视图。
5
7.1.3 UG出图的一般过程
【非主模型方法】出图的一般流程
添加基本视图。例如主视图、俯视图、左视图等
添加其他视图。例如局部放大图、剖视图等 视图布局。包括移动、复制、对齐、删除以及定义视图边 界等视图编辑包括添加曲线、修改剖视符号、自定义剖面线等 插入视图符号。包括插入各种中心线、偏置点、交叉符号 等 标注图纸。包括标注尺寸、公差、表面粗糙度、文字注释 以及建立明细表和标题栏等 保存或者导出为其它格式的文件 关闭文件
ADAMS的简单教程(上)
Settings | Gravity
3: 环境介绍 H
16
3.2 ADAMS/View 视窗布置
ADAMS/View…
主工具箱
建模与仿真
单击鼠标右 键可打开其 它工具
控制工具箱 显示功能的 变更决定于 你在主工具 箱中所选取 的指令而具 有不同的画 面
标题
工作栅格
下拉菜单
坐标系 状态栏
坐标视窗
3: 环境介绍 H
17
3.3 ADAMS/View 2005 主工具箱
12 34 56
1 几何建模 4 运动副
78
9 10
5 颜色
11 12 13 14 15 16
2 测量 3 恢复/重做
6 驱动
2005版
7 移动
9 动态浏览 14 背景颜色
10 动态旋转 11 前后视图
• 零件的局部坐标系 也称零件坐标系。在建立零件的同时产生,随零件一起运动,它在全局坐 标系中的位置和方向决定了零件在全局坐标系中的位置和方向。
标记坐标系 可以把标记分为固定标记和浮动标记两类。固定标记相对零件静止,可用 于定义零件的形状、质心位置、作用与约束的位置与方向等。浮动标记相 对零件运动,某些情况下要借助浮动坐标系来定义作用与约束。
ADAMS/Insight
试验设计与分析模块 ADAMS/Engine Chain
ADAMS/Durability
耐久性分析模块
Accessory Drive Module
ADAMS/DMU Replay 数字化装配回放模块 ADAMS/Rail
接口模块
ADAMS/Pre(现改名为 Chassis)
ANSYS APDL命令流详解-7几何建模技巧
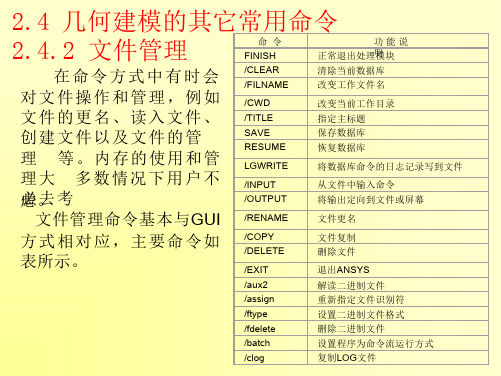
⑶ 改变工作文件名 GUI:Utility Menu>File>Change Jobname 命令:/FILNAME, Fname, Key Fname---工作文件名称,不能超过32个字符。
缺省值为FILE或用户自己定义的名称。 Key---LOG和ERR文件是否改名。如为0或OFF则使用既有的
⑷ 改变当前工作目录 GUI:Utility Menu>File>Change Directory 命令:/CWD, DIRPATH 其中DIRPATH为新工作目录的全路径名。当指定的新工作路 径不存在时,则不会改变路径,且给出错误信息。该命令可以 使用系统认可的任何目录,包括中文命名的目录。
⑸ 指定主标题 GUI:Utility Menu>File>Change Title 命令:/TITLE, Title 其中Title为主标题,最多72个字符,用%将参数或表达式括起 来也可进行替换。该主标题可显示在屏幕上的图形区,还可用 /STITLE指定子标题。
ROTX,ROTY,ROTZ);
DISP(U,ROT);
TEMP。FX,FY, FZ ;
F (FX,FY, FZ);
MX,MY,MZ;
M (MX,MY, MZ);
FORC (F and M)等。
该命令所选择的自由度为其它命令所使用,例如可被D或F
命令使用。例如:
DOFSEL,S,UZ
!选择UZ自由度
D,ALL,ALL
!则所有节点的UZ自由度被约束
5. 组件及其选择 ANSYS中将由同类型图素组成的集称为“元件”(component), 而由多个元件组成的集称为“组件”(assembly),多个组件也可
组成新的组件,有时不必区分元件和组件。利用组件可方便建模
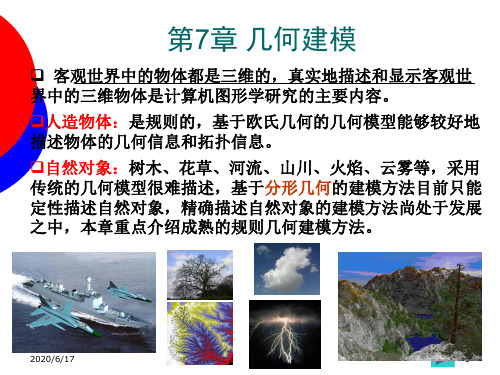
第7章 产品建模技术

7.1 几何建模
建模技术是将现实世界中的物体及其属性转化为计算 机内部可数字化表示,可分析、控制和输出的几何形体的 方法。 产品的设计过程是信息处理的过程。早期的 CAD系统 只能处理二维信息,设计人员通过这种CAD系统来设计绘 制零件的投影图,以表达一个零件的形状及尺寸,而在计 算机内部只记录了零件的二维数据,为了能让计算机内部 处理三维实体,就需要解决几何造型技术问题,即以计算 机能够理解的方式,对实体进行确切的定义及数学描述, 再以一定的数据结构形式在计算机内部构造这种描述,用 以建立该实体的模型。
7.2特征建模
1. 特征 有一定拓扑关系的一组实体体素构成的特定形体,它还 包括附加在形体上的工程信息,对应一个或多个功能,能够 被固定的加工方法加工成型。如孔、槽、凸台等,这些特定 的功能形体,不仅包含的确定的几何形状信息,而且还包含 如材料、尺寸公差和形位公差等各种属性。 2. 特征的分类 (1)形状特征:与公称几何相关的概念; (2)精度特征:可接受公称形状和大小的偏移量,包括尺 寸公差、形位公差、表面粗糙度等; (3)技术特征:性能参数; (4)材料特征:材料种类、性能、热处理和条件等; (5)装配特征:零件相关方向、相互作用面和配合关系。
3.特征建模系统 特征建模通常由特征模型、精度特征模型、材料特征模型组 成,而形状特征模型是特征建模的核心和基础。 特征建模系统的框架如下图所示:
4.特征建模的功能 (1) 预定义特征,建立特征库; (2) 特征库的智能化应用,实现基于特征的零件设计; (3) 为特征附加注释,并为用户例举参考特征; (4) 支持用户定义特征以及管理、操作特征库; (5) 特征消隐、移动; (6) 零件设计中,跟踪和提取有关几何属性。
பைடு நூலகம்
cad教程第7章_三维绘图基础知识
幻灯片1第7章三维绘图基础知识AutoCAD 2004在工程制图的应用中有一项重要的功能,即绘图零件的三维实体模型。
AutoCAD 2004提供直接绘制三维实体的功能,并支持多种三维绘制方法。
本章主要向用户介绍三维绘图的基础知识,讲解基本的三维图形绘制和编辑命令,使用户对AutoCAD 2004三维造型的特点、使用方法及使用技巧有基本的了解,掌握一定三维图形的看图和绘图能力。
幻灯片27.1 基本概念7.2 基本绘图操作7.3 绘制三维表面模型7.4 基本编辑操作7.5 观察和渲染三维图形7.6 三维典型零件绘制实例幻灯片37.1基本概念●7.1.1三维造型的分类用计算机绘制三维图形的技术称为三维几何造型。
A u t o C A D2004可绘制的三维图形有线框模型、表面模型和实体模型3种类型。
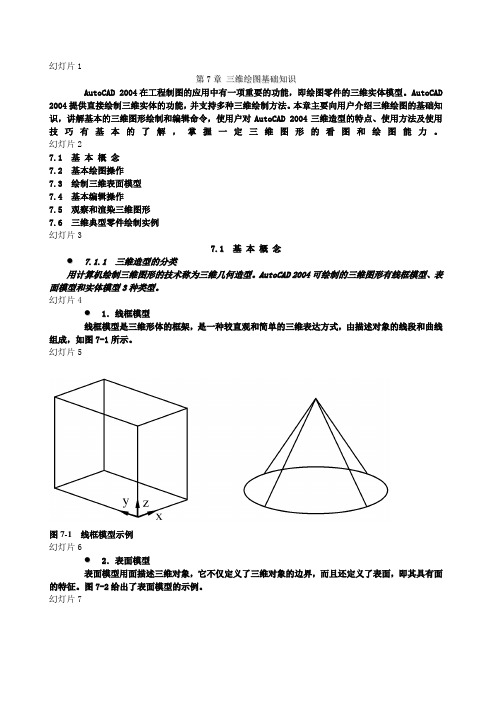
幻灯片4●1.线框模型线框模型是三维形体的框架,是一种较直观和简单的三维表达方式,由描述对象的线段和曲线组成,如图7-1所示。
幻灯片5图7-1 线框模型示例幻灯片6●2.表面模型表面模型用面描述三维对象,它不仅定义了三维对象的边界,而且还定义了表面,即其具有面的特征。
图7-2给出了表面模型的示例。
幻灯片7图7-2 表面模型示例幻灯片8●3.实体模型实体模型不仅具有线、面的特征,而且还具有体的特征。
图7-3给出了实体模型的几个示例。
幻灯片9图7-3 实体模型示例幻灯片10对于实体模型,我们可以直接了解它的体特性,如体积、重心、转动惯量和惯性矩等;可以对它进行消隐、剖切和装配干涉检查等操作,还可以对具有基本形状的实体进行并、交、差等布尔运算,以创建复杂的组合体。
此外,由于着色、渲染等技术的运用可以使实体表面表现出很好的可视性,因而实体模型还广泛用于三维动画、广告设计等领域。
幻灯片11●7.1.2用户坐标系的基本概念用户坐标系(U C S)是用来指明当前可以实施绘图操作的默认的坐标系,在任何情况下都有且仅有一个当前用户坐标系。
高考数学一轮复习 第七章 数列 7.5.3 数列建模问题课件

即 a12a22a32 =aa222002109,
a2 019
故 a12a22a32 是斐a22波019那契数列中的第2 020项.
a2 019
(方法二:归纳法)
a12 a22 a2
=122 =11a23,
a 1 2 a a 2 2 3 a 3 2 1 2 1 2 2 2 2 3 a 4 , a 1 2 a 2 2 a 4 a 3 2 a 4 2 1 2 1 2 3 2 2 3 2 5 a 5 ,
猜测 a12 a22 =aan2n+1.由此可知,
) a
.
的等比数列,{bn}是首项为
12/11/2021
所以经过n年,该市被更换的公交车总数为
S(n)=Sn+Tn=25[ ( 632 ) n- 1 ]
+400n+n
(
n
-1
) a
.
2
(2)若计划7年内完成全部更换,
则S(7)≥10 000,
所以256[ ( 3 ) 7-+1 ]400×7+
2
7 a6≥10 000,
利润率bn= 这 n 天 第 的 n 天 投 的 入 利 资 润 金 总 和 .例 如 , b 3 = 8 1 a a 1 3 a 2 . (1)求b1,b2的值. (2)求第n天的利润率bn.
12/11/2021
【解题导思】
12/11/2021
12/11/2021
【解析】(1)当n=1时,b1=8 1 1 ; 当n=2时,b2=8 1 2 .
12/11/2021
命题角度3 递推关系模型 【典例】意大利著名数学家斐波那契在研究兔子繁殖问题时,发现有这样的数 列:1,1,2,3,5,8,…,该数列的特点是:从第3个数起,每一个数都等于它前面两 个数的和,人们把这样的一列数所组成的数列{an}称为“斐波那契数列”, 则 a12a22a32a22019 是斐波那契数列中的第________项. 世纪金榜导学号
几何建模概述课件
欧拉公式仍然成立。
几何建模技术的发展
➢20世纪60年代:几何建模技术发展 的初始阶段—线框模型,仅含有顶点 和棱边的信息。 ➢20世纪70年代:表面模型。在线框模型的基础上增加面的信息 ,使构造的形体能够进行消隐、生成剖面和着色处理。后来又出 现曲面模型,用于各种曲面的拟合、表示、求交和显示。 ➢20世纪70年代末:实体造型。通过简单体素的几何变换和交、 并、差集合运算生成各种复杂形体的建模技术,实体模型能够包 含较完整的形体几何信息和拓扑信息。 线框模型、表面模型、实体模型统称为几何模型。实体模型是目
形体的定义
形体在 计算机内常 采用六层拓 扑结构来定 义,如果包 括外壳在内 则为六层。 分别是:体、 壳、面、环、
形体的定义在计算机内常采用六层拓扑结构来
边、点。
①体 体是由封闭表面围成的有效空间,其边界是有限个 面的集合,而外壳是形体的最大边界,是实体拓扑结构中 的最高层。 正则形体——
具有良好边界 的形体定义为正则 形体。正则形体没 有悬边、悬面、或 一条边有二个以上的邻面。 ②壳 壳由一组连续的面围成,实体的边界称为外壳,如 果壳所包围的空间是个空集则为内壳。 ③面 面是形体表面的一部分,且具有方向性,它由一个 ①体是由封闭表面围成的有效空间,其边界限个集合 外环和苦干个内环界定其有效范围。面的方向用垂直于面 的法矢表示,法矢向外为正向面。
该公式的含义为:如果一集合S的内部闭包与原来的集 合相等,则称此集合为正则集。空间点的正则集就是正则 几何形体,也就是有效几何形体。
能够产生正则集的集合运算称为正则集合运算。
相应的正则集合算子有:
正则并 U*
正则交 ∩*
正则差 —*
数学上正则集定பைடு நூலகம்为:S=Ki合运算
五轴联动加工中心操作与基础编程 第七章 叶轮零件五轴加工
多轴数控加工技术
7.2叶轮零件五轴加工刀路设计
训练:对含叶轮特征件设计综合五轴加工刀路。训练档:叶轮加工.MCX 训练方法:多种五轴综合加工刀路定义的讲解和现场练习。(模型已建)
五轴加工的CAM刀路设计
一、口部锥面的平行到曲线五轴加工刀路定义。
要点1:选择锥底 曲面边线为边界曲 线,选择锥面为加 工面
关闭叶轮基体所在图层,然后按图所示,将封闭的叶型线框绕回转轴心线旋 转360º生成叶片柱筒实体
按图示构建截面外形轮廓,再绕叶轮轴心旋转切割已构建的叶片柱筒实体, 即可得到单个叶片的雏形。切割用线框轮廓主要用于获得叶轮上部及侧面的 叶型边界,辅助线框以能将柱筒残料全部切割掉而绘制
按图示在前视面构建挤出切割用线框,对超出基体范围的另一侧和底部实施 双向贯穿切割,仅保留叶片有效部分
槽底曲面
刀轴侧倾0゜ 底刃切削
刀轴侧倾90゜ 侧刃切削
第七章 多轴数控加工技术
7.2叶轮零件图样的几何建模
先学习叶轮模型的构建,再处理其它结构特征
按图示在前视面绘制一封闭线框后,以绕旋转轴线旋转360º构建实体的方 法即可得到叶轮基体的3D实体模型
如图所示,先找到Ф150直径柱切面与基体曲面的交线,以正前方与-Y轴交 点处正切面为构图面(前视面Z=75),按b图所示在新层中绘制叶截面的中 线、叶背和叶面型线,同时以100的距离在左上绘出中线的平行线,作为叶 型建模用的回转轴心线
七、叶轮槽槽底曲面五轴加工刀路定义-刀轴控制。
五轴加工的CAM刀路设计
七、叶轮槽槽底曲面五轴加工刀路定义-刀轴控制路径线的构建。
五轴加工的CAM刀路设计
八、叶轮槽五轴加工刀路定义-粗切分层及多槽变换。
两曲面之间
两曲线之间
CG教案几何建模
体素间的交、并、差运算
体素: 球和柱
交
并
差
球-柱
2020/6/17
柱-球
14
物体的 CSG树
➢一个复杂物体可由一些比较简单、规则 的物体经过布尔运算而得到。因而,这个 复杂的物体可描述为一棵树。这棵树的终 端结点为基本体素(如立方体、圆柱、圆 锥),而中间结点为正则集合运算结点。 这棵树叫做CSG树,如图所示。
2020/6/17
5
实体造型技术
造型技术:是研究如何在计算机中建立恰当的模型来表 示真实世界中千姿百态的物体的技术。
实体造型技术(solid modeling): 着重研究如何在计算机中定义、表示一个三维的物体。 关注表示实体的信息的完备性和可操作性。
常用的表示三维实体模型的方法:
空间单元表示法(空间分割表示法):以一组简单物 体通过“粘合”来构造新的物体。
2020/6/17
以一个过程和相应 的控制参数描述,以 一个数据文件和一段 代码的形式存在。 包括——粒子系统、 L系统、迭代函数系 统、FBM等。 例如:用一些控制 参数和一个生成规则 描述的植物。
2
线框模型
➢是早期模型。将形体表示成一组轮廓线的集合,用顶点 和棱边来描述物体。 ➢表示简单,所占的存贮空间较少,处理速度快。 ➢但没有包含全部的信息,与形体之间不存在一一对应关 系,是真实物体的高度抽象,定义的物体存在多义性,不 适合真实感显示。
体素构造表示法(构造实体几何表示法):将实体表 示成基本体素的组合,所不同的是,这里可以采用更 多的运算,如并、交、差等。
边界表示法:通过描述构成实体边界的点、边、面而 达到表示实体的目的。
2020/6/17
6
实体的定义
COMSOLMultiphysics操作手册丛书——几何建模指南

COMSOLMultiphysics操作⼿册丛书——⼏何建模指南“第⼀款真正的任意多物理场直接耦合分析软件”COMSOL Multiphysics操作⼿册丛书⼏何建模⽤户指南中仿科技公司(CnTech Co., Ltd.)前⾔COMSOL Multiphysics是⼀款⼤型的⾼级数值仿真软件,由瑞典的COMSOL公司开发,⼴泛应⽤于各个领域的科学研究以及⼯程计算,被当今世界科学家称为“第⼀款真正的任意多物理场直接耦合分析软件”,适⽤于模拟科学和⼯程领域的各种物理过程,COMSOL Multiphysics以⾼效的计算性能和杰出的多场直接耦合分析能⼒实现了任意多物理场的⾼度精确的数值仿真,在全球领先的数值仿真领域⾥得到⼴泛的应⽤。
在全球各著名⾼校,COMSOL Multiphysics已经成为教授有限元⽅法以及多物理场耦合分析的标准⼯具,在全球500强企业中,COMSOL Multiphysics被视作提升核⼼竞争⼒,增强创新能⼒,加速研发的重要⼯具。
2006年COMSOL Multiphysics再次被NASA技术杂志选为“本年度最佳上榜产品”,NASA技术杂志主编点评到,“当选为NASA科学家所选出的年度最佳CAE产品的优胜者,表明COMSOL Multiphysics是对⼯程领域最有价值和意义的产品”。
COMSOL Multiphysics集前处理器、求解器和后处理器于⼀体,在同⼀个图形化操作界⾯中可以完成⼏何建模、⽹格剖分、⽅程和边界参数设定、求解以及后处理。
COMSOL Multiphysics提供丰富的⼯具,供⽤户在图形化界⾯中构建⾃⼰的⼏何模型,例如1D中通过点、线,2D中可以通过点、线、矩形、圆/椭圆、贝塞尔曲线等,3D中通过球/椭球、⽴⽅体、台、点、线等构建⼏何结构,另外,通过镜像、复制、移动、⽐例缩放等⼯具对⼏何对象进⾏⾼级操作,还可以通过布尔运算⽅式进⾏⼏何结构之间的切割、粘合等操作。
几何建模方法完美版文档
几何建模方法完美版文档摘要:几何建模是计算机图形学和计算机辅助设计领域的一项重要技术,它用于描述和表示三维物体的形状和结构。
本文介绍了几何建模的主要方法,包括实体建模、曲面建模和体素建模,并讨论了它们各自的优点和应用领域。
1.引言在计算机图形学和计算机辅助设计领域,几何建模是一个重要的研究方向。
它用于描述和表示三维物体的形状和结构,广泛应用于虚拟现实、游戏开发、工业设计等领域。
几何建模方法可以分为实体建模、曲面建模和体素建模三大类。
本文将介绍这三种方法的基本原理、优点和应用领域。
2.实体建模实体建模是一种基于物体的实际几何体的表示方法。
它通过定义物体的边界和内部结构,来描述物体的形状和结构特征。
实体建模方法包括边界表示和体素表示两种主要技术。
边界表示方法使用曲面、多边形等几何元素来表示物体的边界。
体素表示方法将物体划分成一系列小的体素,然后根据体素的属性来描述物体的形状。
实体建模方法的优点是能够准确地描述物体的形状和结构,适用于需要精确建模的应用场景,如工业设计、模具设计等。
但是实体建模方法的计算复杂度较高,不适合用于大规模三维物体的建模。
3.曲面建模曲面建模是一种基于物体表面的表示方法。
它通过定义物体的曲线和曲面来描述物体的形状和特征。
曲面建模方法包括参数化曲面、贝塞尔曲线和NURBS曲线等技术。
参数化曲面是通过给定一组参数方程来定义曲面的形状。
贝塞尔曲线是一种通过控制点来定义曲线的方法,可以灵活地控制曲线的形状。
NURBS曲线是一种通过控制点权重来定义曲线的方法,可以更精确地描述曲线的形状。
曲面建模方法的优点是能够灵活地控制物体的形状和结构,适用于需要灵活调整模型的应用场景,如艺术设计、角色建模等。
但是曲面建模方法需要较高的技术要求,对建模人员的专业知识要求较高。
4.体素建模体素建模是一种基于离散网格的表示方法。
它通过将物体划分成一系列小立方体网格单元来表示物体的形状和结构。
体素建模方法包括体素化和体素网格化两种技术。
第7章 CADCAM系统开发
CAD/CAMCAD/CAM第7章CAD/CAM —第7章CAD/CAM系统开发CAD/CAM系统开发7.1 CAD/CAM系统体系结构 7.2 CAD/CAM几何建模开发平台 7.3 图形显示开发平台 7.4 Creo系统二次开发天津大学机械工程系 陈永亮CAD/CAM系统开发1CAD/CAM系统开发2CAD/CAM CAD/CAM系统开发概述从事数字化设计与制造方面的软件开发,有两 条路可供选择: • 一是进行二次开发,如PRO/E或者是 SOLIDWORKS, • 二是采用HOOPS和ACIS进行模型底层代码 的创建与开发CAD/CAM 7.1 CAD/CAM系统体系结构• 典型的CAD/CAM系统体 系结构包括四层结构: • 数据结构、 数据结构 • 几何建模函数、 几何建模函数 • 应用编程接口 • 用户界面 其中数据结构和几何建模 函数是系统的核心。
CAD/CAM系统体系结构CAD/CAM系统开发3CAD/CAM系统开发4CAD/CAM• CAD/CAM开 发平台,也 称几何建模 内核,他提 供了表达实 实 体模型的数 据结构,以 据结构 及操作实体 模型所需的 几何建模函 数几何模型的数据结构:包括 点、线、面、体等多层结构 几何模型的数据结构CAD/CAM系统开发5CAD/CAM几何建模操作函数 : • 1)3D 几何建模:包括拉伸/旋转/2D曲线扫 描,倒角和倒圆,几何阵列,混成, 曲线、 曲面和实体交/差/并运算; • 2)3D模型管理:包括在任何模型层次上添 加用户定义数据,跟踪几何和拓扑变更,计 算质量和体系,反悔和重做; • 3)3D 模型可视化; • 4)存储 存储/调入CAD/CAM系统开发61CAD/CAM 7.2 CAD/CAM系统开发平台几何建模内核: 几何建模内核 • 达索公司的ACIS • 西门子公司的 Parasolid • PTC公司的 Granite • Open CASCADE (开源 )典型的CAD/CAM系统及其几何建模内核CAD/CAM系统开发7CAD/CAMACIS ——一套小型的CAD内核系统• • • • ACIS的结构 ACIS的模型表示 ACIS的几何总线 ACIS的接口CAD/CAM系统开发8CAD/CAM• 几何造型器(Geometric Modeler) • 与核心集成的组件,称 为外壳(Husk)ACIS的结构HOOPS图形显示ACIS的模型表示 ACIS模型表示: • 属性(Attributes)、 • 几何(Geometries) • 拓扑(Topologies)组成几何是指模型的物理描述,如点 (point)、曲线(curve)、曲面(surfac e)、直线(straight)椭圆(ellipse)等; 拓扑是指各种几何实体在空间的 关联,如体(body)、线(wire)、 块(lump)、壳 (shell)、子壳 (subshell) subshell)、面(face)、环(loop)、环 边(coedge) coedge)、边(edge)和顶点 (vertex)等;CAD/CAMACIS核心结构与ACIS核心集成的外壳CAD/CAM系统开发9C++类层次CAD/CAM系统开发10属性依附 于模型实体CAD/CAMACIS的几何总线CAD/CAMACIS的接口ACIS核心提供了一个几何总线,以连接其它的 外壳与应用程序• 1.API函数 :API(Application Procedural Interface)函数是一个函数集,应用程序通过 调用这些函数可以操作模型。
第7章 几何建模

《图形学与虚拟环境》 郑州大学信息工程学院 赵新灿 18
粒子系统的模拟
在虚拟系统的场景中有许多除了建筑物、人体、车辆等规则 模型和象地形、海岸线、山峰、树木等不规则以外的例如烟、 云、火焰、水等这样的模糊景物。而模拟这些模糊景物的常 用办法就是粒子系统模型。 利用粒子系统方法描述自然景物,首先应对所要描述的对象 特性进行分析,包括对象的静态特性,动态特性等;其次是 对粒子系统进行绘制。具体步骤如下: (1)在系统中产生新的粒子; (2)赋予每个粒子一定的静态属性和动态属性; (3)删除在系统中已经存在的但超过生命周期的粒子; (4)根据剩余粒子的动态属性对粒子进行移动和变换; (5)显示具有生命的粒子所组成的图形。
正则体模型以以几何方程表示的模型欧欧氏氏图形学与虚拟环境郑州大学信息工程学院赵新灿8几何模型整数维模型分数维模型非正则体模型用分形几何方法描述对象几何特性以过程式模拟对象的模型表示形体的两大模型图形学与虚拟环境郑州大学信息工程学院赵新灿9物理建模物理建模?物理建模指的是虚拟对象的质量重量惯性表面纹理光滑或粗糙硬度变性模式弹性或可塑性等特征的建模这些特征与几何建模和行为规则结合起来形成更真实的虚拟物理模型
相互关系;表达数据间一种结构联系。 数据的逻辑结构 数据项所建立的真实存在的逻辑结构关系, 与存储介质无关。
《图形学与虚拟环境》
《图形学与虚拟环境》 郑州大学信息工程学院 赵新灿 4
几何建模
几何建模可以进一步划分为层次建模法和属主建模法。 (1)层次建模法:利用树形结构来表示物体的各个组成 部分。例如:手臂可以描述成有肩关节、大臂、肘关节、 小臂、腕关节、手掌、手指等构成的层次结构,而各手指 又可以进一步细分为大拇指、食指、中指、无名指和小拇 指。在层次建模中,较高层次构件的运动势必改变较低层 次构件的空间位置 (2)属主建模法:让同一种对象拥有同一个属主,属主 包含了该类对象的详细结构。当要建立某个属主的一个实 例时,只要复制指向属主的指针即可。每一个对象实例是 一个独立的节点,拥有自己独立的方位变换矩阵。以木椅 建模为例,木椅的四条凳腿有相同的结构,我们可以建立 一个凳腿属主,每次需要凳腿实例时,只要创建一个指向 凳腿属主的指针即可。
SOLIDWORKS零件建模操作及实例第7章绘制草图曲线、文字与3D草图
7.1.4 绘制抛物线
◆抛物线绘制的操作步骤如下:
单击草图绘制工具栏上的 (抛物线)工具,或单击菜单 【工具】∣【草图绘制实体】∣【抛物线】命令,指针形 状变为 。
在视图绘制窗口中,单击鼠标左键确定抛物线的焦点, 拖动鼠标指针,此时视图绘制窗口将出现一条虚的抛物线 。然后将鼠标指针放到虚线的某一处单击鼠标左键,移动 鼠标指针,此时抛物线将沿着虚线逐渐显示。单击鼠标键 完成抛物线的绘制,如图 所示。
图 样条曲线的绘制过程
7.1.2绘制椭圆
• 1. 绘制椭圆的方法
• 进入草绘环境后,用左键单击草图工具栏中的 (椭圆)接钮,或选 择菜单【工具】→【草图绘制实体】→【椭圆(长短轴)】命令
• 然后在绘图区的适当位置单击鼠标左键确定椭圆圆心的位置,拖动 鼠标并单击鼠标左键确定椭圆一个半轴的长度,再次拖动鼠标并单 击鼠标左键确定椭圆另一个半轴的长度,椭圆即绘制完成,如图7-3 所示。
7.1绘制草图曲线
• 7.1.1 绘制样条曲线 • 7.1.2绘制椭圆 • 7.1.3 绘制椭圆弧 • 7.1.4 绘制抛物线
7.1.1 绘制样条曲线
“样条曲线”工具可以绘制出任何复杂的曲线。在样 条曲线中,控制点具有除空间位置坐标以外的更多属性, 它赋予点以运动的特性,在位置基础上增加了方向与力度 的属性。 样条曲线的功能非常强大,我们能以有限的点来绘制复杂 的曲线,尽而构造出曲面,加速产品的开发过程及增加变 化性,本章我们只做简单介绍。
• 第4步:在椭圆圆周上单击鼠标左键确定椭圆弧的起点位置和椭圆弧另一个 轴的长度,然后移动鼠标指针,在椭圆圆周上再次单击鼠标左键确定椭圆弧的 终点位置,如图7-7所示,此时椭圆弧即创建完成。
Hale Waihona Puke 7.1.3 绘制椭圆弧• 调整椭圆弧的方法:选中椭圆弧,椭圆弧上 会出现星位,用鼠标拖动椭圆弧的星位,可 调整椭圆弧的大小,如图7-8(a) 所示。用鼠 标拖动椭圆弧的线,可调整椭圆弧的形状, 如图7-8(b)所示。用鼠标拖动椭圆弧的圆心, 可移动椭圆弧的位置,如图7-8(c)所示。
UG4.0教程第七章 装配建模基础

说明:如果此选项打开,则在转换显示部件时,工作部件保持不变,如步骤(9)的操作;如果此选项关 闭,则新的显示部件总是作为工作部件,如接下来步骤(11)的操作。
(11) 在装配导航器中 MB3 单击根节点 doorlatch_rodassm,在弹出菜单中选择选择“显示 父部件èdoorlatch_assembly”,则主装配成为显示部件,同时成为工作部件。
本章学习的主要知识点有: (1) 装配的基础知识和基本术语。 (2) 利用装配导航器对装配部件进行有效管理。 (3) 掌握“自下而上”的装配建模方法,主要学习添加配对约束的各种方法。 (4) 学习利用“自上而下”的装配建模方法进行零件的关联设计。 (5) 利用装配部件生成装配爆炸视图。
7.1 装配功能模块概述
180
3. 混合装配建模 将以上两种方法结合在一起的装配方法称为混合装配建模。例如首先设计几个主要的部 件模型,再将他们装配到一起,然后在装配中关联设计其它部件,这是一种最为常见的产品 设计方法。
7.2 项目一 自下而上装配建模发动机装配
7.2.1 设计背景
在前面几章中,我们已经完成了工业钻孔机的部分零部件的三维实体建模,现在需要完 成工业钻孔机的装配,以检查设计的准确性和合理性。同时,根据这些完成的装配可以进行 后续项目新组件的设计。装配爆炸图如图 7.12 所示。
7. 加载选项(Load Option)
当一个装配部件被打开时,装配需要搜索并加载所引用的组件。加载选项设置从哪里和 如何加载组件部件。选择菜单“【文件】/【选项】/【加载选项】”,系统打开如图 7.3 所示的 对话框。
缺省的情况下,系统从装配部件相同的目录加载组件,即“从目录(From Directory)”,如 果装配部件和其所引用的组件不在同一个目录下,则需要设定加载方式为“搜索目录”,然后 再“定义搜索目录…”。图 7.3 表达了定义搜索目录的一般过程。
无人机航拍摄影与三维建模作业指导书
无人机航拍摄影与三维建模作业指导书第1章无人机航拍摄影基础 (4)1.1 无人机概述 (4)1.1.1 无人机类型 (4)1.1.2 功能指标 (4)1.1.3 我国相关法规 (5)1.2 航拍摄影设备选择 (5)1.2.1 无人机选择 (5)1.2.2 相机选择 (5)1.2.3 云台选择 (5)1.2.4 镜头选择 (5)1.3 航拍摄影技巧 (6)1.3.1 飞行路径规划 (6)1.3.2 拍摄角度选择 (6)1.3.3 相机参数设置 (6)第2章三维建模基本原理 (6)2.1 三维建模概念 (6)2.2 三维建模方法 (6)2.3 三维建模软件介绍 (7)第3章无人机航拍影像数据获取 (7)3.1 航线规划 (7)3.1.1 航线设计原则 (7)3.1.2 航线设计方法 (8)3.2 影像数据采集 (8)3.2.1 飞行前准备 (8)3.2.2 飞行过程控制 (8)3.2.3 数据传输与存储 (8)3.3 影像质量评估 (8)3.3.1 影像质量评价指标 (8)3.3.2 影像质量评估方法 (9)第4章影像预处理 (9)4.1 影像校正 (9)4.1.1 畸变校正 (9)4.1.2 地理校正 (9)4.2 影像配准 (9)4.2.1 特征提取 (9)4.2.2 特征匹配 (10)4.2.3 变换模型 (10)4.2.4 配准评估 (10)4.3 影像增强 (10)4.3.1 亮度调整 (10)4.3.2 对比度增强 (10)4.3.4 颜色校正 (10)第5章三维建模流程 (10)5.1 数据准备 (10)5.1.1 数据收集 (11)5.1.2 数据筛选 (11)5.1.3 数据预处理 (11)5.2 三维重建 (11)5.2.1 特征提取 (11)5.2.2 相机标定 (11)5.2.3 空间坐标计算 (11)5.2.4 网格 (11)5.2.5 纹理映射 (11)5.3 精度评估 (11)5.3.1 控制点精度评估 (11)5.3.2 重采样精度评估 (12)5.3.3 对比分析 (12)5.3.4 用户评估 (12)第6章三维模型优化与修饰 (12)6.1 模型优化 (12)6.1.1 优化目的 (12)6.1.2 优化方法 (12)6.2 模型纹理映射 (12)6.2.1 纹理映射原理 (12)6.2.2 纹理映射方法 (12)6.3 模型修饰与渲染 (13)6.3.1 模型修饰 (13)6.3.2 渲染输出 (13)第7章无人机航拍摄影在三维建模中的应用 (13)7.1 建筑物三维建模 (13)7.1.1 数据采集 (13)7.1.2 数据处理 (13)7.1.3 应用实例 (13)7.2 道路及地形三维建模 (13)7.2.1 数据采集 (14)7.2.2 数据处理 (14)7.2.3 应用实例 (14)7.3 其他领域应用 (14)7.3.1 水利工程 (14)7.3.2 矿产资源 (14)7.3.3 环境保护 (14)7.3.4 文化遗产保护 (14)7.3.5 农林业 (14)第8章三维模型可视化与交互 (14)8.1.1 三维模型数据结构 (15)8.1.2 三维模型渲染方法 (15)8.1.3 纹理映射与材质 (15)8.2 三维模型交互操作 (15)8.2.1 交互方式概述 (15)8.2.2 旋转、平移和缩放 (15)8.2.3 剖切与测量 (15)8.3 虚拟现实与增强现实应用 (15)8.3.1 虚拟现实技术概述 (15)8.3.2 增强现实技术概述 (15)8.3.3 三维模型在虚拟现实与增强现实中的应用 (15)第9章无人机航拍摄影与三维建模的安全与法规 (16)9.1 无人机飞行安全 (16)9.1.1 飞行前准备 (16)9.1.2 飞行操作 (16)9.1.3 应急处理 (16)9.2 数据安全与隐私保护 (16)9.2.1 数据存储与传输 (16)9.2.2 数据使用与管理 (16)9.3 相关法规与政策 (17)9.3.1 法律法规 (17)9.3.2 政策文件 (17)第10章无人机航拍摄影与三维建模实践案例 (17)10.1 案例一:城市建筑群三维建模 (17)10.1.1 无人机航拍摄影 (17)10.1.2 数据预处理 (17)10.1.3 三维建模 (17)10.1.4 模型质量控制 (18)10.2 案例二:考古遗址三维建模 (18)10.2.1 无人机航拍摄影 (18)10.2.2 数据预处理 (18)10.2.3 三维建模 (18)10.2.4 模型质量控制 (18)10.3 案例三:自然灾害监测与评估 (18)10.3.1 无人机航拍摄影 (18)10.3.2 数据预处理 (18)10.3.3 灾害评估 (18)10.3.4 三维模型应用 (18)10.4 案例四:大型工程三维监测与管理 (19)10.4.1 无人机航拍摄影 (19)10.4.2 数据预处理 (19)10.4.3 三维建模 (19)10.4.4 三维模型应用 (19)第1章无人机航拍摄影基础1.1 无人机概述无人机(Unmanned Aerial Vehicle,UAV)是一种不需要载人即可远程或自主控制飞行的航空器。
高中数学一般几何模型教案

高中数学一般几何模型教案
教学重难点:一般几何模型的相关概念、性质和应用。
教学准备:课本、白板、彩色粉笔、教学辅助材料。
教学过程:
一、导入(5分钟)
教师通过展示各种几何模型的图片,引导学生思考并讨论几何模型的概念及其在生活中的应用。
二、概念讲解(10分钟)
1.介绍基本的几何模型概念,如立方体、圆柱、圆锥等,并讲解它们的性质和特点。
2.讲解各种几何模型之间的关系,如平面图形与立体几何模型之间的联系。
三、性质分析(15分钟)
1.通过实际几何模型展示,引导学生分析其性质,并进行深入讨论。
2.让学生自主解决一些几何模型的相关问题,激发他们的积极性和主动性。
四、应用练习(15分钟)
1.布置一些相关应用题,让学生通过解题来加深对几何模型的理解和掌握。
2.引导学生思考几何模型在生活中的应用,如建筑、工程、设计等领域。
五、总结与反思(5分钟)
1.让学生总结本节课所学内容,强化对一般几何模型的理解和记忆。
2.鼓励学生提出问题和建议,以便于进一步完善教学。
课后作业:完成相关练习题,加深对一般几何模型的理解和运用。
教学反思:通过本节课的学习,学生能够对一般几何模型有一个整体性的认识,同时也能够在实际生活中更好地应用几何学知识。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
郑州大学信息工程学院
赵新灿
16
规则模型
虚拟现实场景系统中包括三大类模型:规则模型和不规则 模型。 规则物体的生成是传统的计算机图形学研究的主要内容, 其技术基础是几何造型,即通过对点、线、面、体等几何 元素,经过平移、旋转、变化等几何变换以及并、交、差 等几何运算,产生实际的或想象的物体模型。借助几何造 型获取对象的精确描述,辅之以相关的光源模型、光照模 型、材质模型、真实感图形算法,可以生成真实感很强的 图形。 不规则模型是指具有不规则几何外形的物体,如地形地貌、 树木、草丛等。相对于规则物体而言,不规则模型的显著 特点是其表面包含有丰富的细节和随机变化的形状,他们 很难用传统的解析曲面来描述。
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
7
几何建模——以计算机能够表示的方式,对实体进 行准确定义(即以一定的数据结构形式对所定义的 几何实体加以描述),在计算机内部构造出实体的 几何模型。
正则体模型 整数维模型 非正则体模型
几何模型
分数维模型
以 欧 氏 几 何 方 程 表示的模型
—— 用分形几何方法描述对象 几何特性,以过程式模拟对象 的模型
即,有效的实体不能有游离的、悬挂的面、边、点。
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
26
7.2 图形数据结构
计算机所描述的形体包含两种信息(图形信 息、非图形信息),如何将它们合理地组织起来?
这就是数据结构问题。
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
27
一、数据结构概念
研究相关数据的逻辑结构和物理结构及其
《图形学与虚拟环境》 郑州大学信息工程学院 赵新灿 18
粒子系统的模拟
在虚拟系统的场景中有许多除了建筑物、人体、车辆等规则 模型和象地形、海岸线、山峰、树木等不规则以外的例如烟、 云、火焰、水等这样的模糊景物。而模拟这些模糊景物的常 用办法就是粒子系统模型。 利用粒子系统方法描述自然景物,首先应对所要描述的对象 特性进行分析,包括对象的静态特性,动态特性等;其次是 对粒子系统进行绘制。具体步骤如下: (1)在系统中产生新的粒子; (2)赋予每个粒子一定的静态属性和动态属性; (3)删除在系统中已经存在的但超过生命周期的粒子; (4)根据剩余粒子的动态属性对粒子进行移动和变换; (5)显示具有生命的粒子所组成的图形。
1)控制点:用来确定曲线和曲面的位置与形状, 而相应曲线和曲面不一定经过的点。
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
22
2)型值点:用来确定曲线和曲面的位置与形状, 而相应曲线和曲面一定经过的点。 3)插值点:为了提供曲线和曲面的输出精度, 在型值点之间插入一系列的点。 2. 边 边是1维几何元素, 由端点定界,是邻面交界线,具 有方向。
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
12
虚拟现实建模特点
虚拟现实系统强调沉浸感、逼真性,即要 求有高的真实感;强调自然的交互方式, 又要满足实时性基础上的交互性要求。总 而言之就是:在具有真实感的环境中,产 生沉浸感,并且可以满足实时性和交互性 的要求。
《图形学与虚拟环境》
郑州大学信息工程学院
第7章 几何建模
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
1
三维建模技术是整个虚拟现实系统建立的基础,是所 有应用中的一个关键的步骤和技术,是整个虚拟现实 技术的灵魂。它的研究有助于提高虚拟环境的真实感、 实时交互的速度和实际交互的可操作程度,使用户真 正地“身临其境”。因为人所感受到的大部分信息是 通过视觉获取的,而且在真实的世界里,人感受到的 是三维信息。所以三维建模技术在虚拟现实技术中就 处于非常核心和基础的地位,是虚拟现实技术所必须 的,是虚拟现实技术的底层。 而且虚拟现实世界是人 可参与并与之交互的世界。模型准确度的高低,模拟 场景的真实与否,往往直接关系到应用实例的成败。
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
23
3. 面 是2维几何元素, 是形体上一个有限、非零的区 域,由一个外环和若干个内环界定其范围。 面有方向,用其外法矢方向作为该面的正向。 4. 环 是有序、有向边组成的面的封闭边界。环中的边 不能相交,相邻两条边共享一个端点。确定面的外 界的环称为外环,逆时针方向排序。而把确定面中 内孔边界的环称为内环,顺时针方向排序。 左侧总在面内,右侧总在面外。
赵新灿
13
VR建模与动画建模区别
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿14VR建模源自主要技术指标 精确度 衡量模型表示现实物体精确度的指标。 显示速度 许多应用对显示时间有较大的限制。 操纵效率 模型的显示、运动模型的行为、冲
突检测等都是频度很高的操作必须高效实现。 易用性 建模技术应尽可能容易的构造和开发 一个好的模型。 广泛性 是指它所能表示的物体的范围。物体 的几何建模、物理建模和行为建模。 实时显示 在虚拟环境中,模型的显示必须在 某个极限帧率以上。
《图形学与虚拟环境》 郑州大学信息工程学院 赵新灿 3
几何建模
虚拟环境中的几何建模是物体几何信息的表示, 涉及表示几何信息的数据结构、相关的构造与操 纵该数据结构的算法。 虚拟环境中的每个物体包含形状和外观两个方面。 物体的形状由构造物体的各个多边形、三角形和 顶点等来确定,物体的外观则由表面纹理、颜色、 光照系数等来确定。 对虚拟对象模型的要求(交互显示能力、交互式 操纵能力和易于构造的能力)。
不同应用领域或部门,对物体的几何形状定义 与描述的要求不同。
《图形学与虚拟环境》 郑州大学信息工程学院 赵新灿
6
有的只需2D图形。特点是:描述简单、传递 快速、节省空间。
但阅读时,用户需“翻译”转换成3D实体, 提高了对用户的要求。 实际设计构形时,思维中先有真实的几何形 状/实物模型,再用视图形式表达设计结果。 仅有2D的CAD系统是不够的,需要能够处理 3D实体的CAD系统。
相互关系;表达数据间一种结构联系。 数据的逻辑结构 数据项所建立的真实存在的逻辑结构关系, 与存储介质无关。
《图形学与虚拟环境》
《图形学与虚拟环境》 郑州大学信息工程学院 赵新灿 15
VR建模流程
三维场景构建的主要步骤为: 前期准备:数据采集和预处理(确定场景 和模型的结构,并进行优化); 场景构建:自然景观、环境景观、三维实 体等模型的构建; 后期工作:模型的集成优化、场景的集成 优化、场景的调度管理等。
《图形学与虚拟环境》
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
10
运动建模
在虚拟环境中,仅仅建立静态的三维几何 体还是不够的,物体的特性还涉及到位置 改变、碰撞、捕获、缩放、表面变形等等。 这也是虚拟环境难以处理的问题之一。
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
11
行为建模
行为建模就是在创建模型的同时,不仅赋予模型外形、质 感等表观特征,同时也赋予模型物理属性和与生俱来的行 为与反应能力,并且服从一定的客观规律。换言之,就是 要使死的模型变成活的角色。 例如:桌面上的重物移出桌面,重物不应悬浮在空中,而 应当做自由落体运动。因为重物不仅具有一定的外形,而 且还具有一定的质量并且受到地心引力的作用。又如:创 建一个人体模型后,模型不仅应具有人体的表观特征,而 且还应具有在虚拟视景中呼吸、行走、奔跑等行为能力, 甚至可以做出表情反应。也就是说,模型应该具有自主性。
《图形学与虚拟环境》 郑州大学信息工程学院 赵新灿 17
不规则物体的建模方法
目前不规则模型的模拟方法主要有如下几类: (1)基于分形迭代的算法。利用整体与局部的自相似特 性,构造一种递归模式,通过无限细分来刻画景象表面的 丰富细节。 (2)基于动态随机生长的算法。利用控制大量的微小粒 子的动态特性的方法,描述模糊景物的动态性和随机性。 该算法中最典型的是粒子系统模型。 (3)基于语法规则的算法。该类算法模型的核心概念是 “重写”,即根据预先定义的重写规则不断地生成复合形 状并用它来取代初始简单物体的某些部分以定义复杂物体。 最成功的基于语法规则的算法模型是L-系统模型。 (4)基于迭代函数的算法。根据几何对象的全貌与局部 在仿射变换意义下具有相似结构这一特点,在几何对象的 整体被定义之后,选定若干仿射变换,将整体变换到局部。 随着迭代次数的增加,造型越来越精细,直到满意的图形。
赵新灿 8
《图形学与虚拟环境》
郑州大学信息工程学院
表示形体的两大模型
《图形学与虚拟环境》
郑州大学信息工程学院
赵新灿
9
物理建模
物理建模指的是虚拟对象的质量、重量、惯性、表面纹理 (光滑或粗糙)、硬度、变性模式(弹性或可塑性)等特 征的建模,这些特征与几何建模和行为规则结合起来,形 成更真实的虚拟物理模型。 物理建模是虚拟现实系统中比较高层次的建模,它需要物 理学与计算机图形学配合,涉及到力的反馈问题,主要是 重量建模、表面变形和软硬度等物理属性的表现。 分形技术和粒子系统就是典型的物理建模方法。分形技术 在虚拟现实中一般仅用于静态远景的建模;在虚拟现实系 统中粒子系统用于动态的、运动的物体建模,如常用于描 述火焰、水流、雨雪、旋风、喷泉等现象。
《图形学与虚拟环境》 郑州大学信息工程学院 赵新灿 19
7.1 几何模型基础
一、表示形体的坐标系
造型坐标系MC(Modeling Coordinate System) 右手直角坐标系。对于定义的每个形体或图素 都有各自的坐标原点和长度单位,这样可以方便形 体和图素的定义。是局部坐标系。
《图形学与虚拟环境》
《图形学与虚拟环境》 郑州大学信息工程学院 赵新灿 5