西华大学实验报告模板
1西华大学实验报告-2010
序号:学生实验报告课程名称:多媒体信息基础选课课号:2002001学生所在学院:管理学院年级/专业/班:2008级工商管理1班学生姓名:沈发萍学号:312008*********实验总成绩:任课教师:阳宪章实验中心名称:信息科学与技术教学部实验一MPC系统配置设计姓名:沈发萍学号:312008*********实验时间: 2010-3-18 成绩:实验目的:1、掌握MPC硬件系统的构成2、掌握MPC软件系统的构成3、掌握多媒体计算机的各个部件的功能协调配置实验内容:a) 说明设计主题、思路、实现的策略、设计分析;b) 按照教程上所讲的计算机各个部件的特征、实现功能,在网络上找出对应的部件和软件;c) 根据比较分析各个部件及软件,组合成一套完整的多媒体计算机系统。
操作步骤:第一步MPC硬件信息搜索第二步MPC软件信息搜索第三步功能比较分析第四步硬件配置设计第五步软件配置设计第六步配置设计的功能说明[注] 每位学员至少各作一套低端和一套高端MPC系统配置设计,并体现在“MPC硬件配置表(低端)”、“MPC软件配置表(低端)”和“MPC硬件配置表(高端)”、“MPC硬件配置表(高端)”中。
配置设计说明(一):1、满足多媒体信息处理的基本要求;2、满足大多数多媒体信息再现的基本需要。
设计者:沈发萍 2010年03 月18日配置设计说明:1、满足一般多媒体信息普通处理的需要;设计者:沈发萍 2010年3月18日配置设计说明:1、满足多媒体信息的一般处理能力,能够支持超级动画、电视电影特技处理;2、突出支持多媒体信息的处理速度和;3、突出支持多媒体信息时显示的层次感;4、支持快速处理多媒体信息时的动能供给;设计者:沈发萍 2010年3月18日配置设计说明:1、满足用户多媒体信息普通处理的需要;2、具备大多数多媒体信息爱好者所需的强大功能。
设计者:沈发萍 2010年3月18日实验二 PowerPoint 处理多媒体姓名:沈发萍学号:312008*********实验时间:2010-4-5 成绩:一、实验目的:合理地在幻灯片中插入和播放动画和多媒体视频文件,通过训练掌握PowerPoint XP 处理动画和视频方面的几项基本技术。
西华大学数学与计算机学院实验报告[001]
![西华大学数学与计算机学院实验报告[001]](https://img.taocdn.com/s3/m/8296d2495ef7ba0d4a733bae.png)
西华大学数学与计算机学院实验报告
课程名称:计算机网络指导教师:纪四维实验成绩:
实验序号:实验名称:交换机基本配
置
实验地点:计算机网络
实验室
实验日期:实验小组编号:1组小组成员姓
名:
郭华波刘召亮张珂唐梁尧奉强徐杰
小组成员学
号:
060552
234363120090
06055200605501
一、实验内容(项目)
掌握交换机命令行各种操作模式的区别,以及模式之间的切换。
二、实验设备与网络拓扑结构
交换机(1台),测试PC(1台),网络线若干。
三、实验目的及要求
(1)掌握交换机各种模式之间的切换及用途。
(2)掌握对交换机单一端口及全局之间的配置。
四、实验内容与步骤
步骤一:连接设备
步骤二:配置交换机Switch0
步骤三:交换机基本端口的配置
步骤四:查看交换机端口配置的基本信息,配置命令如下所示
步骤五:查看交换机的系统和配置信息
五、实验结果
在不同的模式下对交换机有不同的操作,可以对交换机的端口进行配置,包括速率,工作模式等。
六、分析与讨论
学习对交换机的配置,以及相关信息的查看。
PLC实验报告1
西华大学实验报告(理工类)
开课学院及实验室:机械工程与自动化学院机房实验时间:
一、实验目的
1、了解是S7-200系列PLC;
2、学会使用仿真软件SETP7-MicroWIN,掌握程序在线调试的方法;
3、掌握计时器、计数器的正确编程方法;
4、学会计时器和计数器扩张方法
二、实验设备
个人计算机、S7-200系列PLC、通讯电缆、STEP7 for MicroWIN编程软件
三、实验内容及结果
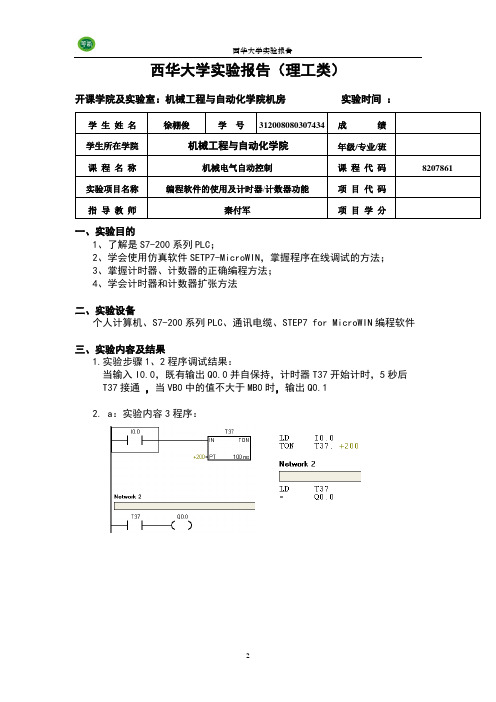
1.实验步骤1、2程序调试结果:
当输入I0.0,既有输出Q0.0并自保持,计时器T37开始计时,5秒后 T37接通,当VB0中的值不大于MB0时,输出Q0.1
2. a:实验内容3程序:
b:实验内容4程序:
3.思考题
1):实验内容4中,T37的PT值改为+50后,T38的PT值应改为+150;
因为100+100=200=50+150,才能使输入I0.0 20秒后,才有输出Q0.0
2):实验内容5中,T37的PT值改为+20后,C0、C1 的预置值均为:+10;
对加法计数器,每2秒来一个脉冲,当前值增加一个单位,当前值
等于预置值时,计时器为on,即20秒on一次,可以理解为:
20*10=10*20=200
200*100=20000ms=20s
3):实验内容6中,不能省略“O C0”,因为当C0计满两个脉冲后,需
要对其立即进行复位,接受再一次的脉冲,使其冲off变为on,为
C1提供脉冲输入,否则C1只会有一个脉冲输入,则不会有Q0.0输
出。
西华大学实习报告和任务书模板
v1.0 可编辑可修改数学与计算机学院实习报告课程名称: 计算机科学与技术专业毕业实习课程代码: 8429910 题目: 系统维护与数据恢复年级/专业/班: 2009级/计算机科学与技术/4班学生姓名: XXX 学号: XXXXXXXXXX 开始时间: 2012 年 10 月 7 日完成时间: 2013 年 3 月 7 日实习地点: XXXXXXXXXXXXXXXXXXXXXXX实习成绩:专业综合技能(30)报告书质量(50)综合表现(出勤、纪律)(20)总分(100)指导教师签名:年月日西华大学数学与计算机学院实习报告实习任务书学院名称:数学与计算机学院实习名称:系统维护和数据恢复课程代码: 8429910 专业:计算机科学与技术年级: 2009级指导教师:陆园学生姓名:蒋华云实习时间:一、实习目的为了将理论和实践结合起来,同时为了毕业后能更好的融入工作当中,在毕业前进行了实习。
了解公司电脑系统的日常维护、重装和对误删数据的恢复二、主要内容及具体要求1掌握windows XP系统的重装2能够对XP系统进行日常的维护3能够恢复硬盘里的误删文件三、主要技术路线提示对于崩溃电脑进行windows xp系统的重装和日常的xp系统的维护,对于误删硬盘文件的恢复四、进度安排第一个月,多观察公司前辈们怎么操作和日常工作第二个月,随着前辈们以前参与日常的工作第三个月,自己开始独立的开始工作,能独立的完成日常的工作第四个月,加强学习,了解更多的知识,和前辈们探讨技术的改进五、实习完成后应上交的材料任务书、实习报告、实习回执、实习鉴定表六、推荐参考资料(不少于3篇)刘彦舫《计算机组装与维护(第四版)》电子工业出版社,2010谭浩强《C语言程序设计》清华大学出版社,2008廖建明《汇编语言程序设计》清华大学出版社,2009指导教师签名日期年月日主管领导审核日期年月日11。
西华大学实习报告
西华大学实习报告篇一:西华大学毕业实习报告2、实习任务及要求本次实习我们分为两个阶段。
第一个阶段,我们选择了位于“水电城”——宜昌的葛洲坝水利枢纽工程,实习主要包括参观、听讲座、答辩等形式;第二个阶段,我们选择的是位于成都金堂的国电金堂火电厂。
这次实习,要求我们:(1)、全面了解发电厂主设备及生产流程,全面了解变电站主设备及操作规程;(2)、了解并学习一定得现场实操技能;(3)、利用专业知识分析生产实际中的相关技术问题;(4)、学习实践工作中的团队协作精神,树立正确劳动观。
3、实习时间及地点20XX年12月14日~21日,葛洲坝水力发电厂; 20XX 年3月12日,中国国电金堂火力发电厂。
4、实习情况及完成情况20XX年12月14日下午,我们登上了去宜昌实习的旅途,老式的绿皮列车载着青春的我们,旅途的奔波与艰苦没有怎么影响到我们快乐的心情,实习就真的要去学点东西,大家都在心里暗暗地捏了把劲,原来学的东西都是书本上的东西,这次能有这么好的机会,一定要学到实际的东西。
终于来到江滨城市--宜昌。
然后我们被安排到在葛洲坝附近的一个饭店,--梦圆大酒店住下。
当天晚上就开始上课了,虽然大家刚下火车都非常的疲惫,本来还在抱怨不让大家好好休息,但是电站工程师精彩的一课就像是一剂兴奋剂给大家注入了活力,大家听得津津有味,自从大学之后这样的景象已经很少见了,老师上课诙谐幽默,时而引经据典,有时也把葛洲坝里一些不好的现象拿出来抨击,讽刺。
老师给我们上了重要的一课,不论是专业上的还是人生上的,成为我们值得用一生去珍藏的宝藏。
根据葛洲坝工人师傅时间安排,虽然只有短短的一个星期,但紧凑、充实的安排,仍让我们大开眼界、受益匪浅。
整个葛洲坝工程体系包括大江电厂、二江电厂、二江电厂200kV开关站、葛洲坝500kV开关站、换流站等工程组成,本次的实习亦主要围绕这些工程展开。
本次实际实习安排如表4-1:安全教育及葛洲坝、三峡水利枢纽工程介绍实习的安全与纪律1、电力生产企业在安全上遵循的原则:1)、安全第一、预防为主。
西华大学机器人创新设计实验报告(工业机械手模拟仿真)(新)
实验报告(理工类)课程名称: 机器人创新实验课程代码: 6003199 学院(直属系): 机械学院机械设计制造系年级/专业/班: 2010级机制3班学生姓名: 学号: 实验总成绩: 任课教师: 李炜开课学院: 机械工程与自动化学院实验中心名称: 机械工程基础实验中心一、设计题目工业机器人设计及仿真分析二、成员分工:(5分)三、设计方案:(整个系统工作原理和设计)(20分)1、功能分析工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
本次我们小组所设计的工业机器人主要用来完成以下任务:(1)、完成工业生产上主要焊接任务;(2)、能够在上产中完成油漆、染料等喷涂工作;(3)、完成加工工件的夹持、送料与转位任务;(5)、对复杂的曲线曲面类零件加工;(机械手式数控加工机床,如英国DELCAM公司所提供的风力发电机叶片加工方案,起辅助软体为powermill,本身为DELCAM公司出品)2、总体方案设计按机械手手臂的不同形式及组合情况其活动范围也是不同的,基本上可以分为四种运动形式:直角坐标式、圆柱坐标式、球坐标式、关节坐标式。
plc实验报告西华

四、实验步骤(按照实际操作过程)
1、绘制如图所示监控窗口。2、定义中间变量:ewgreen:东西绿灯,离散型ewred:东西红灯,离散型ewyellow:
东西黄灯,离散型ewflux:东西向车流量,整型ewposition_lr:东西向车辆由左向右行驶位置控制变量,整型ewposition_rl:东西向
能正常运行。程序运行后,t37从0开始计时,计时到100时,t38从0开始计时,当t38
计时满100后,t38=on,指示灯亮,t37、t38一直计时,直到32767停止计时。当
恢复为0后,t37和t38复位,计数恢复0。试验内容5程序
network 1
ld
an t37
ton t37,+10
network 2
开始计时,当计时到200时,t37=on,指示灯亮,计时器则继续计时,一直到32767才
会停止。
试验内容4程序
network 1
ld
ton t37,+100
network 2
ld t37
ton t38,+100
network 3
ld t38
=
运行程序后,经过程序调试,只有当强制为“1”后计时器才会正常工作,程序才
灯均黄灯闪烁,两个方向车辆均可以通行,同时保证不能碰车;3.按下“系统启动按钮”,
则南北向、东西向只能有一个方向有车辆通行,不能通行方向车辆停靠在停车线以外;每一
方向按照绿灯、黄灯闪烁、红灯循环变化;4.指示灯只能通过plc控制;5.每个方向按照
图十字路口车辆监控系统示意图
三、实验设备、仪器及材料计算机、力控pcauto或以上版本、s7-200系列plc、step 7 for microwin编程
西华大学统计学实验报告

课程实验报告题目:社会经济统计学学生姓名:学号:专业:年级:学院:指导教师:教务处制实验一:EXCEL的数据整理与显示一、实验目的及要求:(一)目的1.了解EXCEL的基本命令与操作、熟悉EXCEL数据输入、输出与编辑方法;2.熟悉EXCEL用于预处理的基本菜单操作及命令;3.熟悉EXCEL用于整理与显示的基本菜单操作及命令。
(二)内容及要求1.根据下面的数据。
1.1用Excel制作一张组距式次数分布表,并绘制一张条形图(或柱状图),反映工人加工零件的人数分布情况。
从某企业中按随即抽样的原则抽出50名工人,以了解该企业工人生产状况(日加工零件数):117 108 110 112 137 122 131 118 134 114 124 125 123127 120 129 117 126 123 128 139 122 133 119 124 107133 134 113 115 117 126 127 120 139 130 122 123 123128 122 118 118 127 124 125 108 112 135 1161.2整理成频数分布表,并绘制直方图。
1.3 假设日加工零件数大于等于130为优秀。
二、仪器用具硬件:计算机(安装Windows2003 、Windows2007 或Windows XP或以上)软件:EXCEL三、实验原理统计中数据整理与显示的相关理论。
四、实验方法与步骤1.点击“数据”→“透视图”,选定区域为日加工零件数一列,输出区域为空白地方,完成,修改一下形成。
2.点击“图表向导”→“条形图”,数据区域为复制的数据,再修改系列、名称、X轴、Y 轴,完成,再修改一下图表。
3.分组后,点击“工具”→“数据分析”→“直方图”,输入区域为体育一列,接受区域为分好的组,标志打钩,输出区域为空白地方,累计百分比和图表输出打钩,完成,在对表和图进行一系列的修改,形成所需要的表和图。
西华大学信息检索实验报告

填写检索条件后的检索界面截图
检索结果
数量
657000
一条相关信息(参考文献格式).高等数学课件(完整版)详细/link?url=tBKcN7KSS7h-Zh5eDbVgE5Mx1_QM3N47jZKjnOqeQOMB-2mmSe3VASacYAj9zc
中国科学院文献情报中心中国科学院成都文献情报中心中国科学院国家授时中心图书馆
获取全文
获取全文(原文)方式
文献传递
2.4期刊论文检索小结。
检索工具(5种以上)以及特征
CNKI SDOS WOS万方数据只是服务平台维普数据库读秀发现
常用检索字段(利用逗号分隔)
篇名,作者,主题,关键词,分类,刊名
获取全文方式
获取全文
获取全文(原文)方式
下载在需求分析
检索词
高等数学完整版课件
词间逻辑关系表示
高等数学课件*完整版
信息来源
电子文献
其他条件与范围检索工具名称地址https:///
检索词
高等数学PPT
词间逻辑关系表示
高等数学*PPT
信息来源
电子文献
其他条件与///
实施检索
填写检索条件后的检索界面截图
检索结果
数量
71300
一条相关信息(参考文献格式)
管平.高等数学./link?url=AHNv9SG7kmi_5IASBGjk4hI4Es1-9A52RIFyHuLngEwBRidecFaPqUy
实施检索
填写检索条件后的检索界面截图
检索结果
数量
17
一条相关信息(参考文献格式)
GB 18068.1-2012金属矿物制品业卫生防护距离 第1部分:水泥制造业
西华大学实习报告模板

西华大学实习报告模板篇一:西华大学食品工程实习报告样板实习报告(理工类)题目: 成都市大王酿造食品有限公司生产实习报告学院:班级:食品科学与工程2班学生姓名:赵丽杰学号:XX05010207指导教师: 徐坤开始时间:月完成时间: XX 8 月 9 日实习地点:成都市大王酿造食品有限公司目录0前言 ................................................ ................... - 2 - 实习目标及性质 ................................................ ...... - 2 - 公司简介 ............................................................ - 2 - 公司概况 ................................................ ....... - 2 - 企业文化 ................................................ ....... - 3 - 产品介绍 ................................................ ....... - 3 - 公司组织机构图 ................................................. - 4 - 1 酱油生产工艺 ................................................ .......... - 7 -该厂现有生产工艺及详解 .............................................. - 7 -原料种类 ................................................ ....... - 8 -蒸煮(原料处理) ................................................. - 9 -大曲的制作方法及质量要求: ..................................... - 9 -拌曲 ................................................ .......... - 11 -发酵 ................................................ .......... - 11 -酱油淋油 ................................................ ...... - 12 -后处理 ................................................ ........ - 12 -成品感官指标 ................................................ ....... - 12 -酱油生产使用的米曲霉( ASPERGILLUS ORYZAE )菌种 ....................... - 12 -酱油种类及特点 ................................................ ..... - 13 -酱油生产工艺流程中的设备简图 ....................................... - 14 - 2腐乳生产工艺 ................................................ ......... - 15 -腐乳生产工艺流程 ................................................ ... - 15 -腐乳生产过程中的注意事项 ........................................... - 17 -浸泡 ................................................ .......... - 17 -磨浆 ................................................ .......... - 18 -滤浆 ................................................ .......... - 18 -煮浆 ................................................ .......... - 19 -点浆 .......................................................... - 20 -压榨 ................................................ .......... - 20 -发酵 ................................................ .......... - 21 -腐乳厂的质量目标及关键控制点 ....................................... - 22 - 3中国调味品发展动态 ................................................ .... - 22 - 4实习体会 ................................................ .............. - 24 -实习感受 ................................................ ........... - 24 -对工厂的建议 ................................................ ....... - 24 - 5 致谢 ................................................ ................. - 25 -0前言实习目标及性质生产实习是教学计划中一个十分重要的实践性教学环节,是大学四年学习中最重要的一次实习,学生在掌握了一定的专业基础知识,尚未学习专业课之前,对本专业的任务、作用、涉及范围等最直接的一次感性认识。
西华大学毕业实习报告范本

游戏实习指导书课程名称:毕业实习课程代码: 5215519 学时: 2周学分: 2编写单位:艺术学院动画系年级/专业/班:学生姓名:学号:指导教师:罗纲系(部) 主任:罗纲实习地点:极触科技有限公司大三下期的时候,课业相对没有那么繁重,班里很多同学都报补习班的报补习班,去公司实习的实习,我通过好友兼同学的推荐和几个朋友一起去一家手机游戏公司实习。
我一直的就业意向就是做偏向2维的设计,而极触科技有限公司主打的是海外市场,做的都是一些有趣的小游戏,这极大的提升了我的兴趣,我非常热爱具有创造性的工作,然后我在公司里也通过前辈的指导和鼓励开始设计,这当中我发现了非常多自己所存在的问题和对设计理解的误区,我之前以为设计就是随心所欲按自己的来没有任何约束,可是不然,所有的商业设计都是面向市场的,面向大众,要符合大众的审美,要符合游戏的理念,要符合厂家的要求等,要在非常多的条条框框里来发挥自己的创造性,我发现设计没有我理解的那么简单和轻易,更多的是有了一份苦逼的感觉。
不过我很感谢我的实习经验,让我学到了很多,吸取了很多教训,认识到自己之前的理解误区,这是一个很好的体验,实践是检验真理的唯一标准。
实习目的通过社会实习实践,熟练专业技能,把平时学到的的知识运用到实际工作中,了解游戏公司,其部门、日常业务活动、整体状态。
并从中认识到游戏公司活动与人力、资金、社会的关系,为以后进入社会做好准备。
实习时间2013 年04月— 05月实习单位极触科技有限公司实习岗位2D 游戏角色设计师动画师实习内容大三上学期的时候我通过同学的介绍去极触科技有限公司面试,公司给我出了设计主界面的测试题目,我和几个同学回到学校后都积极的去完成这个测试,后面很遗憾的我的测试遭到了淘汰,我当时的想法是想知道自己的测试作品中存在的问题,所以我很冒失的问了公司的老板,没想到老板人很好的为我耐心解答,次日让我到公司和他面谈。
和我面谈的是一个美术部的负责人,负责人与我说了我的问题,她说她根本没有看到我的作品,那些程序员没有给她看,她说她很喜欢我嬉皮式的设计。
西华大学汽车理论实验报告

交通与汽车工程学院实验报告课程名称: 汽车理论A 课程代码: 8244880 年级/专业/班: 2009级车辆工程汽电4班学生姓名:龙强学号:6530实验总成绩:任课教师:吴涛开课学院: 交通与汽车工程学院实验中心名称: 汽车交通实验中心西华大学实验报告开课学院及实验室:实验时间:年月日2、实验设备、仪器及材料3、实验内容3.1 一般实验(非上机实验):3.1.1实验方案设计与选择(设计性、创新性实验需写该项内容)3.1.2实验原理及实验步骤(实验工作原理或实验的主要操作过程)3.1.3实验记录(核心代码及调试过程)3.2 上机实验:3.2.1上机实验的内容及要求3.2.2算法设计思想与算法实现步骤3.2.3程序核心代码,程序调试过程中出现的问题及解决方法3.2.4程序运行的结果注解:理工科实验需记录实验过程中的数据、图表、计算、现象观察等,实验过程中出现的问题;其它如在计算机上进行的编程、仿真性或模拟性实验需记录程序核心代码以及程序在调式过程中出现的问题及解决方法;记录程序执行的结果。
4、实验总结4.1实验结果分析及问题讨论4.2实验总结心得体会注解:实验总结的内容根据不同学科和类型实验要求不一样,一般理工科类的实验需要对实验结果进行分析,并且对实验过程中问题进行讨论;在计算机上进行的编程、仿真性或模拟性实验需要对上机实践结果进行分析,上机的心得体会及改进意见。
其它实验应总结实验过程写出心得体会及改进意见。
说明:各门实验课程实验报告的格式及内容要求,请按照实验指导书的要求手工书写。
1.实验目的2.实验设备、仪器及材料3.实验内容3.1程序核心代码,程序调试过程中出现的问题及调试方法Option ExplicitDim n, x, cDim Tq, ig, δDim f, GDim m, i, CdA, rDim i0, Ua, Iw, if0Dim ηt, aDim Ft, Ff, FiDim Fx, Fw, FjPrivate Sub mand1_Click() '驱动力与阻力平衡图Picture1.ClsPicture1.Scale (-10, 15000)-(130, -700)Picture1.Line (-8, 0)-(150, 0): Picture1.Line (0, 15000)-(0, -500) '画坐标轴Picture1.Line (126, -200)-(130, 0) '画横轴箭头Picture1.Line (126, 200)-(130, 0)Picture1.Line (-2, 14700)-(0, 15000) '画纵轴箭头Picture1.Line (2, 14700)-(0, 15000)For i = 1 To 12 '画横坐标刻度线和刻度Picture1.Line (10 * i, 0)-(10 * i, 200)Picture1.CurrentX = 10 * i - 2: Picture1.CurrentY = -50: Picture1.Print 10 * i Next iFor i = 1 To 14 '画纵坐标刻度线和刻度Picture1.Line (0, 1000 * i)-(2, 1000 * i)Picture1.CurrentX = -8: Picture1.CurrentY = 1000 * i + 400: Picture1.Print 1 * i Next iPicture1.CurrentX = -5: Picture1.CurrentY = -50: Picture1.Print 0Picture1.CurrentX = 115: Picture1.CurrentY = 700: Picture1.Print "Ua(km/h)"Picture1.CurrentX = 5: Picture1.CurrentY = 14600: Picture1.Print "F(kN)"Picture1.CurrentX = 5: Picture1.CurrentY = 1000: Picture1.Print "Ff"Picture1.CurrentX = 120: Picture1.CurrentY = 3000: Picture1.Print "Ff+Fw"Dim ig(4) As Singleig(0) = Val(Text18)ig(1) = Val(Text19)ig(2) = Val(Text20)ig(3) = Val(Text21)ig(4) = Val(Text22)f = Val(Text6)m = Val(Text2)G = Val(Text3) * 9.8i = 0CdA = Val(Text7)r = Val(Text4)i0 = Val(Text8)Iw = Val(Text10) + Val(Text11)if0 = Val(Text9)ηt = Val(Text5)Ff = G * fFi = G * ia = 0For n = 600 To 4000For x = 0 To 4δ = 1 + (1 * Iw) / (m * r * r) + (1 * if0 * ig(x) * ig(x) * i0 * i0 * ηt) / (m * r * r)Ua = 0.377 * (r * n) / (ig(x) * i0)Fw = (CdA * Ua * Ua) / 21.15Tq = -19.313 + 295.27 * (n / 1000) - 165.44 * (n / 1000) ^ 2 + 40.874 * (n/ 1000) ^ 3 - 3.8445 * (n / 1000) ^ 4Ft = (Tq * ig(x) * i0 * ηt) / rFj = δ * m * aPicture1.PSet (Ua, Ft), vbBluePicture1.PSet (Ua, Ff + Fw), vbRedPicture1.PSet (Ua, Ff), vbGreenIf Abs(Ff + Fw - Ft) < 1 Then Text26.Text = Ua '求最高车速UamaxNext xNext nEnd SubPrivate Sub mand2_Click() '加速度曲线Picture1.ClsPicture1.Scale (-10, 5)-(130, -0.3)Picture1.Line (0, 0)-(180, 0): Picture1.Line (0, 0)-(0, 5)Picture1.Line (126, -0.03)-(130, 0) '画横轴箭头Picture1.Line (126, 0.03)-(130, 0)Picture1.Line (-1, 4.8)-(0, 5) '画纵轴箭头Picture1.Line (1, 4.8)-(0, 5)For i = 1 To 11Picture1.Line (10 * i, 0)-(10 * i, 0.05)Picture1.CurrentX = 10 * i - 3: Picture1.CurrentY = -0.05: Picture1.Print 10 * i Next iFor i = 1 To 9Picture1.Line (0, 0.5 * i)-(2, 0.5 * i)Picture1.CurrentX = -8: Picture1.CurrentY = 0.5 * i + 0.05: Picture1.Print 0.5 * i Next iPicture1.CurrentX = -3: Picture1.CurrentY = -0.03: Picture1.Print 0Picture1.CurrentX = 110: Picture1.CurrentY = 0.2: Picture1.Print "Ua(km/h))"Picture1.CurrentX = 3: Picture1.CurrentY = 4.8: Picture1.Print "a(m/s^2)"Dim ig(4) As Singleig(0) = Val(Text18)ig(1) = Val(Text19)ig(2) = Val(Text20)ig(3) = Val(Text21)ig(4) = Val(Text22)f = Val(Text6)m = Val(Text2)G = Val(Text3) * 9.8i = 0CdA = Val(Text7)r = Val(Text4)i0 = Val(Text8)Iw = Val(Text10) + Val(Text11)if0 = Val(Text9)ηt = Val(Text5)Ff = G * fFi = G * iFj = δ * m * aFor n = 600 To 4000For x = 0 To 4δ = 1 + (1 * Iw) / (m * r * r) + (1 * if0 * ig(x) * ig(x) * i0 * i0 * ηt) / (m * r * r)Ua = 0.377 * (r * n) / (ig(x) * i0)Fw = (CdA * Ua * Ua) / 21.15Tq = -19.313 + 295.27 * (n / 1000) - 165.44 * (n / 1000) ^ 2 + 40.874 * (n / 1000) ^ 3 - 3.8445 * (n / 1000) ^ 4Ft = (Tq * ig(x) * i0 * ηt) / ra = (Ft - Ff - Fw) / (δ * m)If a < 0 Then GoTo Label1 '不画加速度小于0的部分Picture1.PSet (Ua, a), vbBlueLabel1: Next xNext nEnd SubPrivate Sub mand3_Click() '加速度倒数曲线Picture1.ClsPicture1.Scale (-8, 5)-(130, -0.3)Picture1.Line (0, 0)-(130, 0)Picture1.Line (0, 0)-(0, 5)Picture1.Line (126, -0.03)-(130, 0) '画横轴箭头Picture1.Line (126, 0.03)-(130, 0)Picture1.Line (-1, 4.8)-(0, 5) '画纵轴箭头Picture1.Line (1, 4.8)-(0, 5)For i = 1 To 11Picture1.Line (10 * i, 0)-(10 * i, 0.05)Picture1.CurrentX = 10 * i - 3: Picture1.CurrentY = -0.05: Picture1.Print 10 * i Next iFor i = 1 To 9Picture1.Line (0, 0.5 * i)-(2, 0.5 * i)Picture1.CurrentX = -8: Picture1.CurrentY = 0.5 * i + 0.05: Picture1.Print 0.5 * i Next iPicture1.CurrentX = -4: Picture1.CurrentY = 0: Picture1.Print 0Picture1.CurrentX = 110: Picture1.CurrentY = 0.2: Picture1.Print "Ua(km/h))"Picture1.CurrentX = 4: Picture1.CurrentY = 4.7: Picture1.Print "1/a"Dim ig(4) As Singleig(0) = Val(Text18)ig(1) = Val(Text19)ig(2) = Val(Text20)ig(3) = Val(Text21)ig(4) = Val(Text22)f = Val(Text6)m = Val(Text2)G = Val(Text3) * 9.8i = 0CdA = Val(Text7)r = Val(Text4)i0 = Val(Text8)Iw = Val(Text10) + Val(Text11)if0 = Val(Text9)ηt = Val(Text5)Ff = G * fFi = G * iFj = δ * m * aFor n = 600 To 4000For x = 0 To 4δ = 1 + (1 * Iw) / (m * r * r) + (1 * if0 * ig(x) * ig(x) * i0 * i0 * ηt) / (m * r * r)Ua = 0.377 * (r * n) / (ig(x) * i0)Fw = (CdA * Ua * Ua) / 21.15Tq = -19.313 + 295.27 * (n / 1000) - 165.44 * (n / 1000) ^ 2 + 40.874 * (n / 1000) ^ 3 - 3.8445 * (n / 1000) ^ 4Ft = (Tq * ig(x) * i0 * ηt) / ra = (Ft - Ff - Fw) / (δ * m)If 1 / a > 4.8 Then GoTo Label1 '不画1 / a > 4.8的部分Picture1.PSet (Ua, 1 / a), vbRedLabel1: Next xNext nEnd SubPrivate Sub mand4_Click() '动力特性图Picture1.ClsPicture1.Scale (-10, 1)-(130, -0.1)Picture1.Line (0, 0)-(130, 0)Picture1.Line (0, 0)-(0, 1)Picture1.Line (126, -0.005)-(130, 0) '画横轴箭头Picture1.Line (126, 0.005)-(130, 0)Picture1.Line (-1, 0.95)-(0, 1) '画纵轴箭头Picture1.Line (1, 0.95)-(0, 1)For i = 1 To 11Picture1.Line (10 * i, 0)-(10 * i, 0.005)Picture1.CurrentX = 10 * i - 3: Picture1.CurrentY = -0.005: Picture1.Print 10 * i Next iFor i = 1 To 9Picture1.Line (0, 0.1 * i)-(2, 0.1 * i)Picture1.CurrentX = -8: Picture1.CurrentY = 0.1 * i + 0.05: Picture1.Print "0"; 0.1 * iNext iPicture1.CurrentX = -3: Picture1.CurrentY = -0.02: Picture1.Print 0Picture1.CurrentX = 115: Picture1.CurrentY = 0.05: Picture1.Print "Ua(km/h))"Picture1.CurrentX = 4: Picture1.CurrentY = 0.95: Picture1.Print "D"Picture1.CurrentX = 10: Picture1.CurrentY = 0.05: Picture1.Print "f"Dim ig(4) As SingleDim D '引入动力因数ig(0) = Val(Text18)ig(1) = Val(Text19)ig(2) = Val(Text20)ig(3) = Val(Text21)ig(4) = Val(Text22)f = Val(Text6)m = Val(Text2)G = Val(Text3) * 9.8i = 0CdA = Val(Text7)r = Val(Text4)i0 = Val(Text8)Iw = Val(Text10) + Val(Text11)if0 = Val(Text9)ηt = Val(Text5)Ff = G * fFi = G * iFor n = 600 To 4000For x = 0 To 4δ = 1 + (1 * Iw) / (m * r * r) + (1 * if0 * ig(x) * ig(x) * i0 * i0 * ηt) / (m * r * r)Ua = 0.377 * (r * n) / (ig(x) * i0)Fw = (CdA * Ua * Ua) / 21.15Tq = -19.313 + 295.27 * (n / 1000) - 165.44 * (n / 1000) ^ 2 + 40.874 * (n / 1000) ^ 3 - 3.8445 * (n / 1000) ^ 4Ft = (Tq * ig(x) * i0 * ηt) / ra = (Ft - Ff - Fw) / (δ * m)Fj = δ * m * aD = (Ff + Fi) / G + (δ * a) / 9.8If D < 0 Then GoTo Label1 '不画D小于0的部分Picture1.PSet (Ua, D), vbBluePicture1.PSet (Ua, f), vbRedLabel1: Next xNext nEnd SubPrivate Sub mand5_Click() ' 爬坡度图Picture1.ClsPicture1.Scale (-10, 0.5)-(120, -0.1)Picture1.Line (0, 0)-(120, 0)Picture1.Line (0, 0)-(0, 0.5)Picture1.Line (116, -0.003)-(120, 0) '画横轴箭头Picture1.Line (116, 0.003)-(120, 0)Picture1.Line (-1, 0.48)-(0, 0.5) '画纵轴箭头Picture1.Line (1, 0.48)-(0, 0.5)For i = 1 To 11Picture1.Line (10 * i, 0)-(10 * i, 0.008)Picture1.CurrentX = 10 * i - 3: Picture1.CurrentY = -0.003: Picture1.Print 10 * i Next iFor i = 1 To 4Picture1.Line (0, 0.1 * i)-(2, 0.1 * i)Picture1.CurrentX = -10: Picture1.CurrentY = 0.1 * i + 0.005: Picture1.Print 10 * i Next iPicture1.CurrentX = -4: Picture1.CurrentY = -0.003: Picture1.Print 0Picture1.CurrentX = 110: Picture1.CurrentY = 0.04: Picture1.Print "Ua(km/h))"Picture1.CurrentX = -8: Picture1.CurrentY = 0.47: Picture1.Print "i(%)"Dim ig(4) As Singleig(0) = Val(Text18)ig(1) = Val(Text19)ig(2) = Val(Text20)ig(3) = Val(Text21)ig(4) = Val(Text22)f = Val(Text6)m = Val(Text2)G = Val(Text3) * 9.8CdA = Val(Text7)r = Val(Text4)i0 = Val(Text8)Iw = Val(Text10) + Val(Text11)if0 = Val(Text9)ηt = Val(Text5)Ff = G * fFj = δ * m * aa = 0For n = 600 To 4000For x = 0 To 4δ = 1 + (1 * Iw) / (m * r * r) + (1 * if0 * ig(x) * ig(x) * i0 * i0 * ηt) / (m * r * r)Ua = 0.377 * (r * n) / (ig(x) * i0)Fw = (CdA * Ua * Ua) / 21.15Tq = -19.313 + 295.27 * (n / 1000) - 165.44 * (n / 1000) ^ 2 + 40.874 * (n / 1000) ^ 3 - 3.8445 * (n / 1000) ^ 4Ft = (Tq * ig(x) * i0 * ηt) / rFi = Ft - (Ff + Fw)i = Fi / Sqr(G ^ 2 - Fi ^ 2)If i < 0 Then GoTo Label1 '不画加速度小于0的部分Picture1.PSet (Ua, i)Label1: Next xNext nEnd SubPrivate Sub mand6_Click() '直接挡加速时间曲线Dim tPicture1.ClsPicture1.Scale (-5, 100)-(50, -10)Picture1.Line (0, 0)-(0, 100)Picture1.Line (0, 0)-(50, 0)Picture1.Line (48, -2)-(50, 0) '画横轴箭头Picture1.Line (48, 2)-(50, 0)Picture1.Line (-1, 97)-(0, 100) '画纵轴箭头Picture1.Line (1, 97)-(0, 100)For i = 1 To 4Picture1.Line (10 * i, 0)-(10 * i, 3)Picture1.CurrentX = 10 * i - 1.5: Picture1.CurrentY = -0.1: Picture1.Print 10 * i Next iFor i = 1 To 9Picture1.Line (0, 10 * i)-(1, 10 * i)Picture1.CurrentX = -3: Picture1.CurrentY = 10 * i + 2: Picture1.Print 10 * iNext iPicture1.CurrentX = -1: Picture1.CurrentY = -2: Picture1.Print 0Picture1.CurrentX = 46: Picture1.CurrentY = -5: Picture1.Print "t/s"Picture1.CurrentX = 2: Picture1.CurrentY = 98: Picture1.Print "Ua(km/h))"Picture1.CurrentX = 30: Picture1.CurrentY = 40: Picture1.Print "——直接挡加速时间曲线"ig = 1m = Val(Text2)G = Val(Text3) * 9.8i = 0CdA = Val(Text7)r = Val(Text4)i0 = Val(Text8)Iw = Val(Text10) + Val(Text11)if0 = Val(Text9)ηt = Val(Text5)Ff = G * fFi = G * iFj = δ * m * at = 0For n = 600 To 4000 Step 0.1δ = 1 + (1 * Iw) / (m * r * r) + (1 * if0 * ig * ig * i0 * i0 * ηt) / (m * r * r)Ua = 0.377 * (r * n) / (ig * i0)Fw = (CdA * Ua * Ua) / 21.15Tq = -19.313 + 295.27 * (n / 1000) - 165.44 * (n / 1000) ^ 2 + 40.874 * (n / 1000) ^ 3 - 3.8445 * (n / 1000) ^ 4Ft = (Tq * ig * i0 * ηt) / ra = (Ft - Ff - Fw) / (δ * m)t = t + 1 * 0.377 * r * 0.1 / (i0 * a) '微分法求面积Picture1.PSet (t, Ua), vbRedNext nEnd SubPrivate Sub mand7_Click() '外特性曲线Dim PePicture1.ClsPicture1.Scale (-500, 250)-(4500, -30)Picture1.Line (0, 0)-(4500, 0):Picture1.Line (0, 0)-(0, 240)Picture1.Line (4400, -3)-(4500, 0) '画横轴箭头Picture1.Line (4400, 3)-(4500, 0)Picture1.Line (-50, 235)-(0, 240) '画纵轴箭头Picture1.Line (50, 235)-(0, 240)For i = 1 To 10Picture1.Line (400 * i, 0)-(400 * i, 5)Picture1.CurrentX = 400 * i - 100: Picture1.CurrentY = 0: Picture1.Print 400 * i Next iFor i = 1 To 11Picture1.Line (0, 20 * i)-(50, 20 * i)Picture1.CurrentX = -300: Picture1.CurrentY = 20 * i + 5: Picture1.Print 20 * i Next iPicture1.CurrentX = -150: Picture1.CurrentY = -2: Picture1.Print 0Picture1.CurrentX = 3900: Picture1.CurrentY = 20: Picture1.Print "n(r/min)"Picture1.CurrentX = 100: Picture1.CurrentY = 235: Picture1.Print "Tq(N.m)"Picture1.CurrentX = -400: Picture1.CurrentY = 235: Picture1.Print "Pe/kW"Picture1.CurrentX = 1600: Picture1.CurrentY = 185: Picture1.Print "Tq曲线"Picture1.CurrentX = 1600: Picture1.CurrentY = 45: Picture1.Print "Pe曲线"For n = 600 To 4000Tq = -19.313 + 295.27 * (n / 1000) - 165.44 * (n / 1000) ^ 2 + 40.874 * (n / 1000) ^ 3 - 3.8445 * (n / 1000) ^ 4Pe = Tq * n / 9550Picture1.PSet (n, Tq), vbBluePicture1.PSet (n, Pe), vbRedNext nEnd SubPrivate Sub mand8_Click() '汽车功率平衡图Picture1.ClsPicture1.Scale (-15, 75)-(200, -10)Picture1.Line (0, 0)-(200, 0)Picture1.Line (0, 0)-(0, 70)Picture1.Line (195, -2)-(200, 0) '画横轴箭头Picture1.Line (195, 2)-(200, 0)Picture1.Line (-3, 67)-(0, 70) '画纵轴箭头Picture1.Line (3, 67)-(0, 70)For i = 1 To 3Picture1.Line (50 * i, 0)-(50 * i, 2)Picture1.CurrentX = 50 * i - 5: Picture1.CurrentY = -0.05: Picture1.Print 50 * i Next iFor i = 1 To 13Picture1.Line (0, 5 * i)-(3, 5 * i)Picture1.CurrentX = -10: Picture1.CurrentY = 5 * i + 1: Picture1.Print 5 * iNext iPicture1.CurrentX = -10: Picture1.CurrentY = -2: Picture1.Print 0Picture1.CurrentX = 170: Picture1.CurrentY = 4: Picture1.Print "Ua(km/h)"Picture1.CurrentX = 5: Picture1.CurrentY = 70: Picture1.Print "Pe/kW"Picture1.CurrentX = 110: Picture1.CurrentY = 70: Picture1.Print "(Pf+Pw)/ηt"Dim Pe As Double, Pz As DoubleDim ig(4) As Singleig(0) = Val(Text18)ig(1) = Val(Text19)ig(2) = Val(Text20)ig(3) = Val(Text21)ig(4) = Val(Text22)f = Val(Text6)m = Val(Text2)G = Val(Text3) * 9.8i = 0CdA = Val(Text7)r = Val(Text4)i0 = Val(Text8)Iw = Val(Text10) + Val(Text11)ηt = Val(Text5)Ff = G * fFi = G * iif0 = Val(Text9)For n = 600 To 4000For x = 0 To 4δ = 1 + (1 * Iw) / (m * r * r) + (1 * if0 * ig(x) * ig(x) * i0 * i0 * ηt) / (m * r * r)Ua = 0.377 * (r * n) / (ig(x) * i0)Fw = (CdA * Ua * Ua) / 21.15Tq = -19.313 + 295.27 * (n / 1000) - 165.44 * (n / 1000) ^ 2 + 40.874 * (n / 1000) ^ 3 - 3.8445 * (n / 1000) ^ 4Ft = (Tq * ig(x) * i0 * ηt) / ra = (Ft - Ff - Fw) / (δ * m)Fj = δ * m * aPe = (G * f * Ua + G * i * Ua + CdA * Ua * Ua * Ua / 21.15 + δ * m * a * Ua) / (3600 * ηt)Pz = (G * f * Ua / 3600 + CdA * Ua * Ua * Ua / 76140) / ηtIf Pz > 70 Then GoTo Label1 '不画加速度小于0的部分Picture1.PSet (Ua, Pe), vbBluePicture1.PSet (Ua, Pz), vbRedLabel1: Next xNext nEnd SubPrivate Sub mand9_Click()EndEnd Sub3.2程序运行结果图1-1界面设计1-2驱动力与行驶阻力平衡图1-3加速度曲线1-4加速度倒数曲线1-5动力特性图1-6爬坡度图1-7直接挡加速时间1-8发动机外特性曲线1-9功率平衡图4.思考题西华大学实验报告开课学院及实验室:实验时间:年月日2、实验设备、仪器及材料3、实验内容3.1 一般实验(非上机实验):3.1.1实验方案设计与选择(设计性、创新性实验需写该项内容)3.1.2实验原理及实验步骤(实验工作原理或实验的主要操作过程)3.1.3实验记录(核心代码及调试过程)3.2 上机实验:3.2.1上机实验的内容及要求3.2.2算法设计思想与算法实现步骤3.2.3程序核心代码,程序调试过程中出现的问题及解决方法3.2.4程序运行的结果注解:理工科实验需记录实验过程中的数据、图表、计算、现象观察等,实验过程中出现的问题;其它如在计算机上进行的编程、仿真性或模拟性实验需记录程序核心代码以及程序在调式过程中出现的问题及解决方法;记录程序执行的结果。
单相变压器实验

西华大学实验报告(理工类)开课学院及实验室:实验时间:年月日单相变压器实验一、实验目的1、通过空载和短路实验测定变压器的变比和参数。
2、通过负载实验测取变压器的运行特性。
二、实验项目1、空载实验测取空载特性U0=f(I0),P0=f(U0) , cosφ0=f(U0)。
2、短路实验测取短路特性U K=f(I K),P K=f(I K), cosφK=f(I K)。
三、实验设备及挂件排列顺序1、实验设备5D42三相可调电阻器1件6D43三相可调电抗器1件7D51波形测试及开关板1件2、屏上排列顺序D33、D32、D34-3、DJ11、D42、D43四、实验原理变压器等效电路中的各种电阻、电抗或阻抗如R k、x k、R m、x m等称为变压器的参数,它们对变压器运行能有直接的影响。
知道了变压器的参数后,就可以利用变压器的等效电路来分析和计算其运行性能。
同时,从设计、制造的观点看,合理地选择参数对变压器产品的成本和技术经济性能都有较大的影响。
变压器的参数可以通过空载试验和短路试验来测定。
空载实验用于测定变压器的激磁阻抗。
实验时为安全起见,通常在变压器低压侧加电压,将高压侧开路,然后通过三表(电压、电流、功率表)测得变压器在空载时的原边电压、电流及功率,再通过计算间接求得变压器的激磁阻抗。
短路实验用于测定变压器的短路阻抗。
实验时通常在变压器高压侧加电压,将低压侧直接短路,,然后通过三表(电压、电流、功率表)测得变压器在短路时的原边电压、电流及功率,再通过计算间接求得变压器的短路阻抗。
五、实验步骤图2-4-1 空载实验接线图1、空载实验1)在三相调压交流电源断电的条件下,按图2-4-1接线。
被测变压器选用三相组式变压器DJ11中的一只作为单相变压器,其额定容量Sn=50VA,U1N/U2N=127/,I1N/I2N=。
变压器的低压线圈a、x接电源,高压线圈A、X开路。
2)选好所有电表量程。
将控制屏左侧调压器旋钮向逆时针方向旋转到底,即将其调到输出电压为零的位置。
西华大学统计学实验报告
课程实验报告题目:社会经济统计学学生姓名:学号:专业:年级:学院:指导教师:教务处制实验一:EXCEL的数据整理与显示一、实验目的及要求:(一)目的1.了解EXCEL的基本命令与操作、熟悉EXCEL数据输入、输出与编辑方法;2.熟悉EXCEL用于预处理的基本菜单操作及命令;3.熟悉EXCEL用于整理与显示的基本菜单操作及命令。
(二)内容及要求1.根据下面的数据。
1.1用Excel制作一张组距式次数分布表,并绘制一张条形图(或柱状图),反映工人加工零件的人数分布情况。
从某企业中按随即抽样的原则抽出50名工人,以了解该企业工人生产状况(日加工零件数):117 108 110 112 137 122 131 118 134 114 124 125 123127 120 129 117 126 123 128 139 122 133 119 124 107133 134 113 115 117 126 127 120 139 130 122 123 123128 122 118 118 127 124 125 108 112 135 1161.2整理成频数分布表,并绘制直方图。
1.3 假设日加工零件数大于等于130为优秀。
二、仪器用具硬件:计算机(安装Windows2003 、Windows2007 或Windows XP或以上)软件:EXCEL三、实验原理统计中数据整理与显示的相关理论。
四、实验方法与步骤1.点击“数据”→“透视图”,选定区域为日加工零件数一列,输出区域为空白地方,完成,修改一下形成。
2.点击“图表向导”→“条形图”,数据区域为复制的数据,再修改系列、名称、X轴、Y 轴,完成,再修改一下图表。
3.分组后,点击“工具”→“数据分析”→“直方图”,输入区域为体育一列,接受区域为分好的组,标志打钩,输出区域为空白地方,累计百分比和图表输出打钩,完成,在对表和图进行一系列的修改,形成所需要的表和图。
西华大学数字信号处理实验报告

WN = e − j (2π / N )
2、FFT算法 调用格式是X=fft(x)或X=fft(x,N) 对前者,若x的长度是2的整数次幂,则按该长度实现x的快速变 换,否则,实现的是慢速的非2的整数次幂的变换;对后者,N应为2 的整数次幂,若x的长度小于N,则补零,若超过N,则舍弃N以后的数 据。Ifft的调用格式与之相同。
序列 f (k ) 的时域宽度的关系。(提示:可用上述dconv()函数来解决)
1 2 f 1(k ) = 1 0 k = −1 k =0 k =1 其它
1 -2 ≤ k ≤ 2 f 2(k ) = 0 其它
MATLAB源程序:
f1=[1 2 1]; f2=[1 1 1 1 1]; k1=-1:1;k2=-2:2; [f,k]=dconv(f1,f2,k1,k2);
f1=ones(1,4); f2=ones(1,3); k1=0:3;k2=0:2; dconv(f1,f2,k1,k2);
其输出图像为:
结果分析:根据实验结果分析可知,实验所得的数值跟 f 1(k1) 与
f 2(k 2) 所卷积的结果相同,从而验证了实验的正确性。直接调用已
经编好的函数,得到卷积结果及图形。系统的零状态响应就是激励 信号与该系统的单位响应的卷积。
其输出图像为:
四、心得体会
通过这次实验, 掌握了离散傅立叶变换的基本理论, 特别是FFT 的基本算法以及在数字信号处理中的广泛应用,并且知道了可以用 FFT对信号进行分离与重构,同时还可以利用FFT来消除噪声对信号 的干扰,对语音信号进行重构,从中可以看出傅立叶变换在DSP中的 重要运用地位。
实验三:数字滤波器的设计
i = −∞
∑ f (i) • h(k − i) 。