第18章 静定结构的位移计算
静定结构的位移计算

= 0.0044m = 0.44cm()
实际位移状态
虚设力状态
返回
返回
作业: 第77页 4-1(a)、(b)、4-2
返回
休息一下
返回
⑤几种常见图形的情况:
单位荷载弯矩图由若干直线段组成 时,就应该分段图乘。
MMP
EI
dx
=
1 EI
( AP1 y1
AP2 y2
AP3 y3 )
两个梯形相乘时,不必找出梯形的 形心,而将一个梯形分解为两个三角 形,然后分别与另一梯形图乘。
EI
EI
M M P'dx
M M P"dx)
MMP
EI
dx
=
1 EI
( al 2
ya
bl 2
yb )
ya
=
2c1d 33
yb
=
1c 3
2d 3
均布荷载作用区段的弯矩图与直线 段图乘。
返回
几种常见图形的面积和形心的位置:
a
b
h
h l/2 顶点 l/2
(a+l)/3 (b+l)/3
l
A=hl/2
作业情况
一、桁架的内力标注在图上。
二、隔离体要画出。 用1-1截面将其断开……完了??? 应说明取那边为隔离体,并将隔离体 要画出。
三、桁架的内力+、-号代表 拉、压,仍有同学出错。
四、右面隔离体能计算出 FN1、FN2、FN3、FN4吗?
返回
返回
§4—1 结构位移和虚功的概念 §4—2 变形体系的虚功原理和单位荷载法 §4—3 静定结构由荷载引起的位移 §4—4 图乘法 §4—5 互等定理
建筑力学课件 第十八章 位移法
18.3 位移法的基本未知量与基本结构
2.独立的结点线位移
在超静定梁及刚架的计算中,为了减少基 本未知量的个数,使计算得到简化,通 常忽略各杆的轴向变形对位移的影响, 并假设结点转角θ和各杆弦转角φ都是微 小的。因而认为受弯直杆两端之间的距 离在变形后仍保持不变,这样,每一根 受弯直杆就相当于一个约束,从而减少 了独立的结点线位移数目。
其MB中A弧弯线矩的M箭AB弧尾线在的上箭面尾为在上下侧面受为拉下。侧受拉,弯矩 (3)将弯矩的竖标值画在杆端的受拉侧,并连虚线; (4)用区段叠加法作出该杆的最后弯矩图(由于AB杆
段无荷载,所以可以将虚线直接变成实线),如图 18-7(b)所示。
18.2 位移法的基本原理
归纳上面位移法的思路,其过程如下:
1.位移法是以结点位移(刚结点转角为其中之一)作为 基本未知量,通过添加附加约束限制结点位移(附加 刚臂限制刚结点的转动,其他形式的结点位移用其他 约束限制),使原超静定结构变成若干单超梁的组合 体,即位移法求解超静定结构的基本结构;
2.在添加附加约束处列出平衡条件。例如附加刚臂限制 了刚结点的转动,所以建立的平衡条件为力矩平衡条 件;
M AB
3i A
3i
l
M
F AB
M BA 0
(18-3)
FsAB
3i l
静定结构的位移计算—图乘法计算静定结构的位移(建筑力学)

ql 2 8
) (5 8
l) 4
5ql 4 384 EI
()
温度变化时位移计算公式
设结构上侧温度变化t1,下侧温度变化t2,则杆轴线处温度变化为t0 =(h2t1+h1t2)/h。
此时任一微元体变形如图所示,包括两种形式:
①轴线伸长量du; ②截面转角dθ。
使用公式 L t L 和图中的几何关系,不难得到:
l
l
]
[t0
0
l
t h
1 2
l
l
]
-6l 18l 2 6l(1 3)()
h
h
N图
M图
支座位移时结构位移计算公式
支座位移直接引起结构位移,并不引起结构变形。因此,仅有支座位移时, 结构微元体变形为0。所以,虚拟状态内力虚功为0。将这一结论代入结构位移计 算的一般公式,即可得到支座位移时结构的位移计算公式:
N Nds EA
荷载作用下位移计算步骤
(1)计算位移状态(实际状态)结构内力:M、Q、N; (2)假设虚拟状态(受力状态); (3)并求其内力 M、 、Q ;N (4)代入位移计算公式并求解。
计算示例
例:计算图(a)所示简支梁中点C处得竖向线位移(EI为常数)。
(a)实际状态
(b)虚拟状态
解:(1)计算实际状态弯矩
位置如图a所示。
(3)当图形的面积和形心位置不易
图b
确定时,可将其分解为几个简单的图形,分
别与另一图形相乘,最后把结果相加,图b。
图a
(4)当y0所在图形是由若干直线段
组成的折线时,应分段进行图乘,再进行叠
加,图c。
(5)当直杆各杆段截面性质不同,即
EI不同时,应分段图乘,再进行叠加,图d。
结构力学 结构的位移计算
k
F Ndu
Md
F Q 0ds
F RC
只有荷载作用
无支座移动
k F Ndu Md FQ 0ds
由材料力学知
du
FNP d s EA
d
M Pds EI
d s
k FQP d s GA
10
1.2
9
k--为截面形状系数
A A1 [Al为腹板截面积]
FP
X
待分析平衡的力状态
(c)
直线
几点说明:
X C (1) 对静定结构,这里实际用的是刚体
虚设协调的位移状态
虚位移原理,实质上是实际受力状态 的平衡方程,即
由外力虚功总和为零,即:
X F 0
X
P
C
M 0 B
(2) 虚位移与实际力状态无关,故可设
1 x
X P b 0 (3) 求解时关键一步是找出虚位移状态的
计算结构的位移,就必须明确广义力与广义位移的对应关系。常见的对应有
以下几种情况:
基本原则
求哪个方向的位移就在要求位移的方向上施加相应的单位力。
A
B
位移方向未知
时无法直接虚
拟单位荷载!
求A点的 水平位移
P=1
m=1 求A截面 的转角
m=1
m=1
求AB两截面 的相对转角
P=1
P=1
求AB两点 的相对位移
位移与约束协调:位移函数在约束处的数值等于约束位移。
§4-2 虚功原理
一、虚功原理的三种形式
1、质点系的虚位移原理
具有理想约束的质点系,其平衡的必要和充分条件是:作用于质点系的主
静定结构的位移计算—结构位移公式及应用(工程力学课件)

【例4】求图示桁架k点水平位移. (各杆EA相同)
P
P
0
NP 0
P a
2P k
a
1
1 2 2 Ni
Δ= FN FNP l
EA
1
1
解:
kx
1 [(1)(P)a EA
(1)( P )a
2 2P 2a] 2(1 2) Pa () EA
ds
FN FNP EA
ds
1. 梁和刚架
在梁和刚架中,由于轴向变形及剪切变形产 生的位移可以忽略,故位移计算公式为:
2. 桁架
Δ=
MMP EI
ds
Δ=
FN FNP ds FN FNP ds FN FNPl
EA
EA
EA
1
MMP EI
ds
kFQ FQP GA
ds
FN FNP EA
ds
若结构只有荷载作用,则位移计算一般公式为:
1 (M ds FQ 0 FN )ds
MP
EI
0
kFQ P GA
FNP
EA
1
MMP EI
ds
kFQ FQP GA
ds
FN FNP EA
ds
适用条件:小变形、线弹性
➢ 正负号规则
1
MMP EI
ds
kFQ FQP GA
ds
FN FNP EA
M、FQ、FN、FRK :单位载荷 FP1 1在结构中产生
的内力和支座反力
➢ 单位荷载法
一次计算一种位移
求绝对位移!
BF
C
D
q
实际状态
(位移状态)
CH求、CV、C
静定结构的位移计算—结构位移计算的一般公式(建筑力学)

W外 P Ri ci
根据虚功原理得:
W内 Md Qds Ndu
Md Qds Ndu Ri ci
①求线位移 其虚拟状态的外荷载为与所求线位移同位 置、同方向的一个单位集中力。 ②求角位移 其虚拟状态的外荷载为与所求角位移同位 置的一个单位力偶。
求线位移
求角位移
ห้องสมุดไป่ตู้
位移计算的两种状态
③求相对线位移
其虚拟状态的外荷载为与所求相对线位移
的两点连线共线、方向相反的一对单位集中力。
④求相对角位移
其虚拟状态的外荷载为作用在所求相对角 位移的两个截面位置处的一对转向相反的单位 力偶。
②结构任一微元体变形
轴向变形 du、切向变形 、ds角位移 。d
位移计算的两种状态
2.虚拟状态(受力状态)
指结构在某种因素(荷载、温度变化、支座位移等)作用下产生位移的之前所处的受力平衡 状态。该平衡状态一般是未知的,它并不影响实际的结构位移,通常可以随意假设,因此也称为 虚拟状态。通常假设虚拟状态的外荷载为与所求位移对应的单位荷载。具体对应关系如下:
虚功原理
1.实功与虚功
(1)实功:力×位移(位移由做功的力引起) (2)虚功:力×位移(位移由其它因素引起)
2.虚功原理 W外 W内
位移计算的两种状态
1.实际状态(位移状态)
指结构在某种因素(荷载、温度变化、支座位移等)作用下产生位移的时刻所处的状态。此 时,结构位移和变形表示为:
①支座的位移
水平位移 c1、竖向位移 、c2转角 。 c3
M
求相对线位移
虚拟状态中,由外荷载引起的支座反力和内力分别记为:
支座反力:水平反力 R、1 竖向反力 、R 2支座转角 。R3 内力:弯矩 M、剪力 、Q轴力 。N
18桁架的位移计算

=4.75mm<[
w ]=
3000mm = 6mm 500
梁的刚度足够 所以,选用20a工字钢 所以,选用20a工字钢 20a
3、提高梁抗弯刚度的措施 梁的挠度和转角与梁的抗弯刚度EI 梁的挠度和转角与梁的抗弯刚度EI 、梁的跨 荷载作用情况有关,那么, 度L 、荷载作用情况有关,那么,要提高梁的 抗弯刚度可以采取以下措施: 抗弯刚度可以采取以下措施: (1) 增大梁的抗弯刚度EI 增大梁的抗弯刚度EI
5ql 4 fa = 384 EI
而
1 fb = fa 38
②两端支座内移
如图所示,将简支梁的支座向中间移动而变 如图所示, 成外伸梁,一方面减小了梁的跨度, 成外伸梁,一方面减小了梁的跨度,从而减 小梁跨中的最大挠度; 小梁跨中的最大挠度;另一方面在梁外伸部 分的荷载作用下,使梁跨中产生向上的挠度 分的荷载作用下, (图c),从而使梁中段在荷载作用下产生 ),从而使梁中段在荷载作用下产生 的向下的挠度被抵消一部分, 的向下的挠度被抵消一部分,减小了梁跨中 的最大挠度值。 的最大挠度值。
荷载类型 转角 最大挠度
1.悬臂梁 1.悬臂梁
集中荷载作用在自由端
2
θB =
2.悬臂梁 2.悬臂梁
FP l 2 EI
wmax
FP l 3 = 3EI
弯曲力偶作用在自由端
Ml θB = EI
wmax
Ml 2 = 2 EI
续表
3.悬臂梁 均匀分布荷载作用在梁上 3.悬臂梁
ql 3 θB = 6 EI
wmax
-0.625
250000 +0.625
0 0
0 0
1420000
根据上表, 根据上表,得
静定结构的位移计算
K
MMPds EI
F N FNP ds + F Q F QP ds
EA
GA
F Ri Ci
式中:E弹性模Fra bibliotek; GA 横截面积; I
剪切模量; 截面惯性矩;
k
截面形状系数。如:对矩形截面
k=6/5;圆形截面k=10/9。
三、静定结构在荷载作用下的位移公式
如果结构只有荷载作用,因支座移动引起的刚
例1 图示桁架各杆的EA相等,求C 结点 的竖向位移 vc
解 (1)设虚拟状态(如上图b所示)
弯
轴
剪
曲
矩
力
力
率
的
的
的
的
影
影
影
影
响
响
响
响
图a 所示矩形截面圆弧形钢杆,轴线的半径与
截面高度之比r/h=10,弹性模量之比E/G=2.5,
曲杆B端形心在竖向荷载F 作用下的竖向线位移 P
由对应于弯矩、轴力、剪力、曲率的四部分组
成:
BP M N Q r
设虚拟状态(图b)计算虚内力,用截面法计 算实际状态的内力,代人位移公式运算,并注
定的施工措施,因而也需要进行位移计算。
1.2 结构位移计算的一般公式
一、变形体的虚功原理 功:力对物体在一段路程上累积效应的量度,
也是传递和转换能量的量度 实功 :力在自身引起的位移上所作的功
当静力加载时,即: FP1由0增加至FP1
11 由0增加至 11
力Fp1在位移
11
上作的实功
W11=
1 2
KP
M M P ds F N FNPl
EI
EA
(4)拱
福建专升本建筑学力法位移法支座位移解析

一、静定结构在支座移动时的位移计算静定结构由于支座移动并不产生内力也无变形,只会发生刚体位移。
因此,静定结构由于支座移动引起的位移计算属于刚体体系问题。
应用虚功方程求解时,虚拟状态的选取同前,因实际状态的变形为零,因此内力虚功为零。
这时结构的位移表达式可以根据式(8-9)改写为(8-28)如果令表示支座移动所引起的位移,为虚拟状态中的支座反力,表示支座位移,则式(8-28)改写为(8-29)式(8-29)就是计算结构由于支座移动所引起的位移表达式。
例8-11 图8-30a 所示为三铰刚架。
支座B 有水平位移a 和竖向位移b ,试求铰C 两边截面的相对转角。
图8-30解:为求C 铰两边截面的相对转角,需在其两边截面施加一对方向相反的单位力偶。
此时因单位力偶的作用产生的支座反力为、、、,如图8-30b 所示。
利用式(8-29),得∑⋅-=c R k K ∆ic ∆R c ∑⋅-=c R ic∆Ax F Ay F Bx F By F ())(h a 0a h 1b F a F c R By Bx C ic 弧度-=⎪⎭⎫⎝⎛-⨯-=⋅-⋅-=⋅-==∆∑ϕ负号表示C处的相对转动的方向与所设的单位力偶的转向相反。
例1 已知简支梁AB跨度为l,右支座B竖直下沉Δ,如图(a)所示。
求梁中点C的竖向位移ΔCV。
解:(1) 在梁中点C处加单位力P=1,如图(b)所示。
(2)计算单位荷载作用下的支座反力:由于A支座无位移,故只需计算B支座反力RB即可。
由对称得B支座反力RB=1/2 (↑)(3) 计算ΔCVΔCV=-∑RC=-(-1/2×Δ)=Δ/2 (↓)例2 图示三铰刚架跨度l=12m,高为h=8m。
已知右支座B发生了竖直沉陷C1=6cm,同时水平移动了C2=4cm (向右),如图(a)所示。
求由此引起的左支座A处的杆端转角φA。
解: (1) 在A处虚设单位力偶m=1,如图(b)所示。
(2) 计算单位荷载作用下的支座反力由于A支座无位移,故只需计算B支座反力即可。
04.静定结构的位移计算

重点在于解决荷载作用下应变 、、 的表达式。 一、计算步骤
(1)在荷载作用下建立 M P .N P .QP的方程,可经由荷载内力应力应变 过程推导应变表达式。 (2)由上面的内力计算应变,其表达式由材料力学知
( M N Q ) d s
MP EI
k--为截面形状系数
M N Q
钢筋混凝土结构G≈0.4E 矩形截面,k=1.2,I/A=h2/12
DQ
EI 1 h2 = = DM k GAR2 4 R2
DN I 1 h = DM AR2 12 R h <1 R 10 DM DM < < 1 400
2
可见剪切变形和轴向
变形引起的位移与弯
1)列出两种状态的内力方程:
0x AC段 l 2
NP 0 MP 0
QP 0
N 0 M x
Q 1
l x l CB段 2
2 l M q x P 2 2 l QP q x
4.50P 3.00P
0 .278 l As 0 1.50 0.278 l 3 As
0
0.63Pl E s As 0.50Pl E s As
1.50 0.222 l 2 As
1.13Pl E s As
NN Pl C EA
C
3.81 1.13 2 Pl A E A E s s c c
c2
c1
1
R1
M .N .Q .Rk
R2
实际变形状态
虚力状态
( M N Q )ds Rk ck
(1) 建立虚力状态:在待求位移方向上加单位力; (2) 求虚力状态下的内力及反力 M .N .Q .Rk 表达式;
结构力学——静定结构位移计算

结构力学——静定结构位移计算在工程和建筑领域中,结构力学作为一门重要的学科,主要研究了结构的受力、变形、破坏机理等问题。
其中,静定结构位移计算是结构力学中的一个重要内容。
静定结构所谓静定结构,是指能够通过静力学方程求解出所有节点的受力、反力和变形的结构。
这种结构是不需要知道材料的物理性质和荷载的实际情况的。
在静定结构中,结构的支座固定方式和荷载情况是已知的,因此能够通过解决一组静力学方程,求解出结构中节点的受力和变形。
静定结构位移计算静定结构位移计算是静定结构的重要计算方法之一。
在结构分析中,位移是一种常见的形变量,它反映了物体在载荷作用下发生的形变情况。
在静定结构中,位移是结构的重要参数之一。
它可以通过求解一组线性方程组得到。
具体来说,就是通过应变—位移—节点力关系,将结构各节点位移用系数矩阵和加载节点力表示出来,再通过求解一个线性方程组,就可以得到各节点的位移值。
静定结构位移计算的步骤静定结构位移计算中的步骤包括:1.列出节点位移方程节点位移与内力之间有一定的关系,可以通过位移方程和内力方程来表示。
这些方程可以根据物理实际条件进行建立。
2.确定支座反力支座反力是从位移计算中得到的结果之一。
支座反力是指结构上所有支点所承受的力,在位移计算时是必须考虑的。
3.形成节点位移方程组形成节点位移方程组时,需要考虑杆件的个数、受力条件、材料特性、支座情况等因素。
4.解出节点位移通过解一个线性方程组,我们可以根据已知的节点力和位移方程,求出每个节点的位移值。
静定结构位移计算的应用静定结构位移计算在现代工程设计中具有广泛的应用。
它能够在保证结构稳定的前提下,可以对结构进行优化设计,提高结构的安全性、稳定性、经济性等方面的性能。
除此之外,静定结构位移计算还可以应用于建筑设计、桥梁设计、机械设计、工业生产等领域中。
它可以提供结构设计的数据支持,为结构工程的实施提供参考。
静定结构位移计算是结构力学中的一个重要方向,其计算方法基于静力学方程进行,其特点是简单、可靠和实用。
结构力学 静定结构的位移计算1
P
A
3.位移计算的一般公式
设:结构受荷载的作用, 及支座移动,求A点的竖 向位移。
W外=W变
外力所作的虚功总和W外,等于 各微段截面上的内力在其虚变 形上所作的虚功的总和W变 。
1)位移状态的设定 q
P A
dx
a) 若求结构上C点的竖向位移,
2) 若求结构上截面A的角位移,可在截面处加一单位力矩。
若求桁架中AB杆的角位移,应 加一单位力偶,构成这一力 偶的两个集中力的值取 1/d。 作用于杆端且垂直于杆(d等 于杆长)。
3) 若要求结构上两点(A、B)沿其连线 的相对位移,可在该两点沿其连线 加上两个方向相反的单位力。
A
2)作 M 图 P=1
A C
1.5 M1 图
B 2m
6
B
B
D
66
A
BB
D
9
1
CV
1 1 61.5 3
EI 2
2 2 3 9 5 1.5
EI 3
8
189
=
(向下)
4EI
2)作 M 图
A
BD
6 6
M2 图
A
BB
D
9
1
D
1 EI
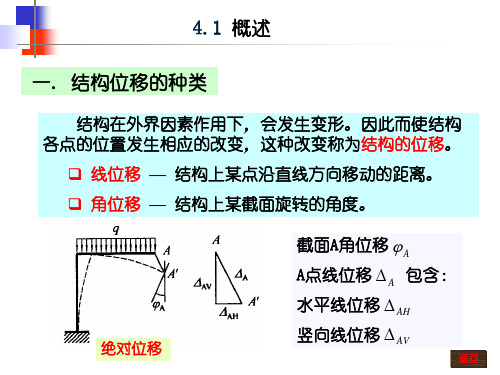
一、概述
1.位移的种类
1) 角位移:杆件横截面产生的转角 2) 线位移:结构上各点产生的移动 3) 相对位移(相对角位移,相对线位移)
Aθ
Δ A
θ
(A截面的转角θ )
(A结点的水平线 位移Δ,转角θ)
ΔA A
静定结构的位移计算
2. 实际状态中各杆弯矩方程为
AB段: MP=
, BC段:
MP=
3. 代入公式(12-4)得
△Ay=
qx 2 dx qL2 dx = (-x)(- 2 ) + (-L) (- 2 ) EI EI
()
5
结构在荷载作用下的位移计算——图乘法
图乘法的注意事项
(1)必须符合上述三个前提条件; (2)竖标yC只能取自直线图形; (3)与yC在杆件同侧乘积取正号,异侧取负号。
t1
k
K
△Kj
P2
ds
k PK=1
t2 P1 K′
k
c3 K
ds
k
R 3
du j、 dv j、 d j
N k、 k、 k Q M
c1
c2
R 1 R 2
虚拟状态-力状态
实际状态-位移状态
利用虚功原理
外力虚功 内力虚功 可得
T= W=
=
3
12.4 结构在荷载作用下的位移计算
2. 讨 论
在实际计算时,根据结构的具体情况,式(12-4)可以简化:
9.1静定结构的位移计算 2. 结构位移的种类 (1)某点的线位移 (2)某截面的角位移
(3)两点间的相对线位移
(4)两截面间的相对角移 (3)广义力及广义位移 作 功 的 两 因 素
力: 集中力、力偶、一对集中力、一对力偶、一个力系 统称为广义力 位移:线位移、角位移、相对线位移、相对角位移、一组位移 统称为广义位移
图乘法
40kN 10kN 10kN/m 30 B 5 EI 3m 60 D 5 P2=1 C
B
3EI
D
C
B
结构位移计算
1 A y0 EI
o
Mi = x tgα
y0 y0 = x0 tgα
Mi图 x
应用图乘法计算的注意点: ⑴ y0 与A 的取值: y0 一定取自直线图形,对应取A 图形的形心处。 A 则取 自另一个图形,且取A 的图形的形心位置是已知的。 ⑵ 若 y0 与A 在杆轴或基线的同一侧,则乘积A y0 取正号;若 y0 与A 不在杆轴 或基线的同一侧,则乘积A y0 取负号。
2、几种常见图形的面积和形心的位置
h
2l/3 三角形A = hl/2 l/3
顶点 FQ=0 h
l/2
l/2
标准二次抛物线A = 2hl/3 顶点 FQ=0
h h
顶点 FQ=0 3l/4 l/4
5l/8
3l/8
标准二次抛物线A = hl/3
标准二次抛物线A = 2hl/3
例:试求图示刚度为 EI 的简支梁 B 端截面的角位移。 解:⑴ 画出两种状态的弯矩图。 ⑵ 图乘计算 B :
l 2ac 2bd ad bc 6
式中同侧为正,异侧为负
3、应用图乘法时的几个具体问题
⑴ 如果两个图形都是直线图形,则 y0 可取自其中任一图形。
⑵ 如果EI 分段为常数或取 y0 的图形为折线时,应分段图乘再叠加。 ⑶ 如果图形比较复杂,则可将其分解为几个简单图形,分项图乘计算后
再进行叠加。
MP
A B C D
A2
b
A1
A B
A2
C
A3
D
a
A1
y2 l/3 l/3
M1
d
M
y1
y2
y3
c l/3
y1
y1
结构力学静定结构位移计算

R iCi
Ri的正向与Ci的正向一致
它是 Maxwell, 1864和Mohr, 1874提出, 故也称为Maxwell-Mohr Method
截面转角
相对线位移
相对转角
Δ
P=1
1/2
1/2
(三)计算步骤:
➢ 根据拟求位移作单位力状态 ➢ 求单位力作用下的支反力 ➢ 利用公式求位移
R iCi
2)作虚功的力系为一个集中力偶
M
T M
4)作虚功的力系为两个等值 反向的集中力偶
M
M
A
B
T M A M B M ( A B ) M AB
(二)实功(Real Work)和虚功 (Virtual Work)
图(a)中P1所作的功为:T11
1 2
P111
实功
△11
图(b)中P2所作的功为:T22
变形体系在外力作用下处于平衡状态的充要条件是: 对于任意给定的虚位移,外力虚功等于内力虚功
即 T12=W12
说明:
(1)受力状态和变形状态是相互独立的,二者彼此无关。 (2)第一状态要求平衡(内力并不一定是真实的)
第二状态要求虚位移条件 (3)变形体虚功原理是变形体力学的普遍原理。 (4)刚体虚功原理是特殊情况,即内力虚功为零的情况。
1 2
P2 22
图(c)中先作用P1,此时P1所作的功为: 第一个下标表示位移的地点和方向
1 T11 2 P111 再作用P2,此时P2所作的功为:T22
1 2
第二个下标表示产生位移的原因
△22
P2 22
P1 在加P2过程中也做功,此时P1继续作功为:
P2
T12 P112
虚功
《结构力学》静定结构的位移计算

03
在实际应用中,可以根据结构特点、计算精度和计算资源等因素综合考虑选择 合适的数值方法。
THANKS FOR WATCHING
感谢您的观看
桥梁横向位移限制
对于大跨度桥梁,需要限制其在风荷载、地震等横向力作用下的横 向位移,以保证桥梁的稳定性和行车安全。
支座位移控制
桥梁支座的位移也需要进行控制,以避免支座过度磨损或脱空等现 象,确保桥梁的正常使用。
建筑工程中变形缝设置要求
伸缩缝设置
为避免建筑物因温度变化、地基沉降等因素而产生裂缝或 破坏,需要在建筑物的适当位置设置伸缩缝,使建筑物能 够自由伸缩。
计算方法
采用分段叠加法,将组合结构分成若 干段,分别计算各段的位移再求和; 或采用有限元法直接求解整体位移。
需考虑不同材料或截面的变形协调问 题。
03 图乘法计算静定结构位移
图乘法基本原理及适用条件
基本原理
图乘法是基于结构力学的虚功原理,通过图形面积与形心位置的乘积来简化计 算结构位移的一种方法。
均布荷载作用
荷载沿梁长均匀分布,引 起梁产生均匀弯曲变形。
位移计算
采用图乘法或积分法求解, 考虑荷载、跨度、截面惯 性矩等因素。
悬臂梁在集中力作用下位移
悬臂梁基本概念
一端固定,另一端自由的 梁,承受集中力、均布荷 载等。
集中力作用
在悬臂梁自由端施加集中 力,引起梁产生弯曲和剪 切变形。
位移计算
采用叠加原理,分别计算 弯曲和剪切变形引起的位 移,再求和。
制造误差对结构位移的影响不同。
影响系数
02
利用影响系数可以计算制造误差引起的结构位移,影响系数与
结构形式和荷载情况有关。
敏感性分析
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设材料的泊松比 1 / 3, 当h / l 1 / 10 时,有
5ql 4 1 Cy 384EI [1 39]
可见此时剪力对位移的影响只是弯矩影响的1/39=2.56%, 所以通常可略去不计。
例18-2 试求图示刚架C点的转角,各杆的EI均为常数。
q
B
EI l EI C
A l
q
2
q 剪力方程为 F = (l-2x ) SP 2
q
2
F 1
x
A l/2
x
B
C
l/2
B
A l/2
C l/2
C点的竖向位移
cy 2(
l/2
0
l/2 k F F MM P S SP dx dx) 0 EI GA
1 l/2 x q k l/2 1 q 2 2[ (lx x )dx (l 2 x)dx] EI 0 2 2 GA 0 2 2 q l/2 2 3 kq l / 2 (lx x )dx (l 2 x)dx 0 0 2 EI 2GA
C
N
du P M d P FS dv P - FRiCi
单位荷载法
该式是平面杆件结构位移计算的一般公式,可以求结构上任何点的任 何位移。 计算结果若为正,则所求得实际位移方向与所假设单位力指向相同,为 负则相反。
18.4 荷载作用下的位移计算
如果结构只受到荷载作用,且不考虑支座位移的影响,则位移公式为
5ql 4 kql2 () 384EI 8GA
式中 第一项是弯矩的影响; 第二项是剪力的影响。
对矩形截面
k 1.2, A bh, I bh3 / 12, 代入上式,
得
5ql 4 24E h 2 [ 1 Cy 384EI 25G ( l ) ]
则 E / G 2(1 ) 8 / 3,
变形和位移条件。因此,位移计算是计算超静定结构的基础。
18.2 功与虚功原理
18.2.1 实功与虚功 1. 位移的表示方法
集中荷载F1作用点沿F1方向的位移,记为11。 第一个下标1表示此位移是与F1相对应的位移;
第二个下标1表示此位移是荷载F1引起的,如图示。
F1
1
11
A
2
21
B
2. 功的表示方法
续变形(位移状态),则力状态的外力在位移状态的相应位移上所做
的外力虚功总和(记为We ),等于力状态中变形体的内力在位移状态 的相应变形上所做内力虚功的总和(记为Wi ),即虚功方程
We Wi
注意:
1)虚位移或虚变形必须与结构的支承条件相协调并满足变形连续性
条件,它必须是结构的支承条件所允许发生的。 2)虚功原理在实际应用中有两种方式: 虚力原理——虚荷载法; 虚位移原理——虚位移法。
FN FNP kF F MMP dx dx S SP dx EA EI GA
式中
EA—— 抗拉刚度;
GA—— 抗剪刚度;
EI—— 抗弯刚度;
k—— 截面的切应力分布不均匀系数,只与截面形状有关,对于 矩形截面k=1.2,圆形截面k=10/9,薄壁圆环形截面k=2; Mp、FNP、FSP ——实际荷载引起的弯矩、轴力、剪力; Mp、FNP、FSP ——虚拟单位荷载引起的弯矩、轴力、剪力。
总内力虚功为 Wi FN du P M d P FS dv p 式中 ——沿每一杆的全长积分;
——对结构中所有相关杆件求和。
根据虚功方程有
F
C
Ri
Ci FN duP Md P FS dvP
即
F
18.1.2 位移计算的目的
• 计算结构位移的一个目的是为了校核结构的刚度。 校核结构的刚度,一般就是检验结构中的某一位移是否超过规 定的允许值,以防止结构因产生过大的变形而影响其正常的使 用。 • 计算结构位移的另一个目的是为了求解超静定结构。
在计算超静定结构的内力时,除了平衡条件外,还必须考虑结构的
3.虚功的两个状态
实功的力与位移彼此不独立,相互之间存在着一定的关系。 虚功的力和位移彼此是独立的。 F 由于小变形,故符合叠加原理。 图示变形可分解为两种彼此独立的状态。
F1 1
11
A
1
F2
1
12
2
22
B
A
2
21
B
A
F2 1
12
2
22
B
a)
b)
所谓力状态和位移状态,必须根据所讨论的虚功来确定。 例如,对虚功 W12 F1来说,图 a所示的状态是力状态,图b所示的是位 12
第18章 静定结构的位移计算
18.1 计算结构位移的目的 18.2 功与虚功原理
18.3 计算结构位移的一般公式 18.4 荷载作用下的位移计算 18.5 图乘法 18.6 支座移动时的位移计算
18.7 弹性体系的几个互等定理 小结
18.1 计算结构位移的目的
18.1.1 变形和位移
• 结构在荷载、温度变化、支座位移和制造误差等各种因素作用下 会发生变形。 • 结构的位移指结构中杆件横截面位置的改变,分线位移和角位移 两种。
F F l MMP dx N NP EI EA
例 18-1 试求图示矩形截面简支梁中点C的竖向位移Δ cy,并 比较弯矩和剪力对该位移的影响。梁的EI、GA均为常数。
q A l/2 C l/2 B
x
b
h
解:作虚拟状态,在C点加一竖向单位荷载F=1。
F 1
x
B
A l/2
C l/2
作实际状态的MP 、FSP 图,虚拟状态的M、FS 图。
q
x
A
l/2 C l/2 B
F 1
x
B
A
l/2
C l/2
设坐标原点在A点,由于对称,可以只取左半部分AC段进行计算 虚拟状态中AC段(0≤x≤l/2)上的弯矩方程为 剪力方程为 FS=1/2
M=x/2
实际状态中AC段的弯矩方程 M = (lx-x )
FN du P Md P FS dvP
式中微段的变形是由荷载引起的,以Mp、FNP、FSP表示实际状态中微段dx 上所受内力。由实际变形 F M 1 kF du P dx NP dx d p dx P dx dvP dx SP dx EI EA GA 得到
Wi Fdu Md FS dv
A
B
e)
B
dx
du
dx
dv
I R
d
式中
对所有杆求和; 对整根杆积分;
dx
3.变形体的虚功原理
设变形体在力系的作用下处于平衡状态(力状态),又设该变形体由 于别的与上述力系无关的原因作用下,发生符合约束条件的微小的连
l
代入得C点的转角为
MMP C EI dx
l ql 2 dx qx 2 dx (1) 0 (1) 0 2 EI 2 EI l
ql3 ql3 2ql3 2 EI 6 EI 3EI
(
)
例18-3 试求图示对称桁架节点I的竖向位移,各杆采用的型 钢规格已在图所示桁架的右半部分杆件旁标出。材料的弹性 模量E=2.06×105 MPa。
应注意实功算式前的系数1/2。
F b F1
0
11
a
(2)虚功:力在与其自身无关的相应位移上所做的功。 当 i j 时,Wij表示做功的力与产生位移的不是一个力。 位移 12是荷载 F2所引起,与荷载F1没有任何关系。
F1 1
12
A
F2 2
22
B
W12 F112
当位移与力的方向一致时,虚功为正功;方向相反时,虚功为负。 虚功算式前的系数为1。
移状态。但对虚功 W21 F2来说,如图 b所示的状态则是力状态,而 21
图a所示的是位移状态。
4. 广义力与广义位移
广义力:做功的力可以是一个集中力或一个集中力偶,也可以是一对 集中力或一对集中力偶,甚至可以是某一力系。 广义位移:与广义力相对应的位移,分别是线位移或角位移、相对线位 移或相对角位移。
• 截面的移动称为线位移,截面的转动称为角位移。
• 在平面结构的位移计算中,通常采用水平位移分量和竖直位移 分量来表示线位移。 • 通常将线位移、角位移、相对线位移及相对角位移统称为广义 位移,记为∆。
举例:
梁C截面的竖 直位移和转角
刚架C点的水平、 竖直位移和转角
平面悬臂刚架的变形及 自由端的位移和转角
解:作虚拟状态,在C点加的一个单位集中力偶 M =1。
作Mp 图 l
a)
C
EI
各杆的x坐标轴,水平杆以C点为原点,向左为正。 竖杆以B点为原点,向下为正。 则BC杆的弯矩方程为
2
q
B
x
EI
C
M P= AB杆为
qx 2
M = -1
l
EI
x
M P= -
ql
2
2
A
M = -1
欲求两截面的相对角位移,则在两截面处加一对方向相反的单位力偶。
欲求两点沿其连线方向上的相对线位移,就应该在此两点沿其连线方
向上加一对方向相反的单位集中力。 欲求桁架某杆的角位移时,则可在该杆的两端加一对大小等于杆长倒数、 与杆垂直但方向相反的集中力。
18.3 计算结构位移的一般公式
18.3.1 单位荷载法
FNP FNP F F l dx N NP 0 EA EA