英文翻译及文献 单片机-传感器 压力检测
传感器技术论文中英文对照资料外文翻译文献
传感器技术论文中英文对照资料外文翻译文献Development of New Sensor TechnologiesSensors are devices that can convert physical。
chemical。
logical quantities。
etc。
into electrical signals。
The output signals can take different forms。
such as voltage。
current。
frequency。
pulse。
etc。
and can meet the requirements of n n。
processing。
recording。
display。
and control。
They are indispensable components in automatic n systems and automatic control systems。
If computers are compared to brains。
then sensors are like the five senses。
Sensors can correctly sense the measured quantity and convert it into a corresponding output。
playing a decisive role in the quality of the system。
The higher the degree of n。
the higher the requirements for sensors。
In today's n age。
the n industry includes three parts: sensing technology。
n technology。
and computer technology。
单片机英文文献及翻译)
Validation and Testing of Design Hardening for Single Event Effects Using the 8051 MicrocontrollerAbstractWith the dearth of dedicated radiation hardened foundries, new and novel techniques are being developed for hardening designs using non-dedicated foundry services. In this paper, we will discuss the implications of validating these methods for the single event effects (SEE) in the space environment. Topics include the types of tests that are required and the design coverage (i.e., design libraries: do they need validating for each application?). Finally, an 8051 microcontroller core from NASA Institute of Advanced Microelectronics (IAμE) CMOS Ultra Low Power Radiation Tolerant (CULPRiT) design is evaluated for SEE mitigative techniques against two commercial 8051 devices.Index TermsSingle Event Effects, Hardened-By-Design, microcontroller, radiation effects.I. INTRODUCTIONNASA constantly strives to provide the best capture of science while operating in a space radiation environment using a minimum of resources [1,2]. With a relatively limited selection of radiation-hardened microelectronic devices that are often two or more generations of performance behind commercialstate-ofthe-art technologies, NASA’s performance of this task is quite challenging. One method of alleviating this is by the use of commercial foundry alternatives with no or minimally invasive design techniques for hardening. This is often called hardened-by-design (HBD).Building custom-type HBD devices using design libraries and automated design tools may provide NASA the solution it needs to meet stringent science performance specifications in a timely,cost-effective, and reliable manner.However, one question still exists: traditional radiation-hardened devices have lot and/or wafer radiation qualification tests performed; what types of tests are required for HBD validation?II. TESTING HBD DEVICES CONSIDERATIONSTest methodologies in the United States exist to qualify individual devices through standards and organizations such as ASTM, JEDEC, and MIL-STD- 883. Typically, TID (Co-60) and SEE (heavy ion and/or proton) are required for device validation. So what is unique to HBD devices?As opposed to a “regular” commercial-off-the-shelf (COTS) device or application specific integrated circuit (ASIC) where no hardening has been performed, one needs to determine how validated is the design library as opposed to determining the device hardness. That is, by using test chips, can we “qualify” a future device using the same library?Consider if Vendor A has designed a new HBD library portable to foundries B and C. A test chip is designed, tested, and deemed acceptable. Nine months later a NASA flight project enters the mix by designing a new device using Vendor A’s library. Does this device require complete radiation qualification testing? To answer this, other questions must be asked.How complete was the test chip? Was there sufficient statistical coverage of all library elements to validate each cell? If the new NASA design uses a partially or insufficiently characterized portion of the design library, full testing might be required. Of course, if part of the HBD was relying on inherent radiation hardness of a process, some of the tests (like SEL in the earlier example) may be waived.Other considerations include speed of operation and operating voltage. For example, if the test chip was tested statically for SEE at a power supply voltage of 3.3V, is the data applicable to a 100 MHz operating frequency at 2.5V? Dynamic considerations (i.e., nonstatic operation) include the propagated effects of Single Event Transients (SETs). These can be a greater concern at higher frequencies.The point of the considerations is that the design library must be known, the coverage used during testing is known, the test application must be thoroughly understood and the characteristics of the foundry must be known. If all these are applicable or have been validated by the test chip, then no testing may be necessary. A task within NASA’s Electronic Parts and Packaging (NEPP) Program was performed to explore these types of considerations.III. HBD TECHNOLOGY EVALUATION USING THE 8051 MICROCONTROLLERWith their increasing capabilities and lower power consumption, microcontrollers are increasingly being used in NASA and DOD system designs. There are existing NASA and DoD programs that are doing technology development to provide HBD. Microcontrollers are one such vehicle that is being investigated to quantify the radiation hardness improvement. Examples of these programs are the 8051 microcontroller being developed by Mission Research Corporation (MRC) and the IAμE (the focus of this study). As these HBD technologies become available, validation of the technology, in the natural space radiation environment, for NASA’s use in spaceflight systems is required.The 8051 microcontroller is an industry standard architecture that has broad acceptance, wide-ranging applications and development tools available. There are numerous commercial vendors that supply this controller or have it integrated into some type of system-on-a-chip structure. Both MRC and IAμE chose this device to demonstrate two distinctly different technologies for hardening. The MRC example of this is to use temporal latches that require specific timing to ensure that single event effects are minimized. The IAμE technology uses ultra low power, and layout and architecture HBD design rules to achieve their results. These are fundamentally different than the approach by Aeroflex-United Technologies Microelectronics Center (UTMC), the commercial vendor of a radiation–hardened 8051, that built their 8051 microcontroller using radiationhardened processes. This broad range of technology within one device structure makes the 8051an ideal vehicle for performing this technology evaluation.The objective of this work is the technology evaluation of the CULPRiT process [3] from IAμE. The process has been baselined against two other processes, the standard 8051 commercial device from Intel and a version using state-of-the-art processing from Dallas Semiconductor. By performing this side-by-side comparison, the cost benefit, performance, and reliability trade study can be done.In the performance of the technology evaluation, this task developed hardware and software for testing microcontrollers. A thorough process was done to optimize the test process to obtain as complete an evaluation as possible. This included taking advantage of the available hardware and writing software that exercised the microcontroller such that all substructures of the processor were evaluated. This process is also leading to a more complete understanding of how to test complex structures, such as microcontrollers, and how to more efficiently test these structures in the future.IV. TEST DEVICESThree devices were used in this test evaluation. The first is the NASA CULPRiT device, which is the primary device to be evaluated. The other two devices are two versions of a commercial 8051, manufactured by Intel and Dallas Semiconductor, respectively.The Intel devices are the ROMless, CMOS version of the classic 8052 MCS-51 microcontroller. They are rated for operation at +5V, over a temperature range of 0 to 70 °C and at a clock speeds of 3.5 MHz to 24 MHz. They are manufactured in Intel’s P629.0 CHMOS III-E process.The Dallas Semiconductor devices are similar in that they are ROMless 8052 microcontrollers, but they are enhanced in various ways. They are rated for operation from 4.25 to 5.5 Volts over 0 to 70 °C at clock speeds up to 25 MHz. They have a second full serial port built in, seven additional interrupts, a watchdog timer, a power fail reset, dual data pointers and variable speed peripheral access. In addition, the core is redesigned so that the machine cycle is shortened for most instructions, resulting in an effective processing ability that is roughly 2.5 times greater (faster) than the standard 8052 device. None of these features, other than those inherent in the device operation, were utilized in order to maximize the similarity between the Dallas and Intel test codes.The CULPRiT technology device is a version of the MSC-51 family compatible C8051 HDL core licensed from the Ultra Low Power (ULP) process foundry. The CULPRiT technology C8051 device is designed to operate at a supply voltage of 500 mV and includes an on-chip input/output signal level-shifting interface with conventional higher voltage parts. The CULPRiT C8051 device requires two separate supply voltages; the 500 mV and the desired interface voltage. The CULPRiT C8051 is ROMless and is intended to be instruction set compatible with the MSC-51 family.V. TEST HARDWAREThe 8051 Device Under Test (DUT) was tested as a component of a functional computer. Aside from DUT itself, the other componentsof the DUT computer were removed from the immediate area of the irradiation beam.A small card (one per DUT package type) with a unique hard-wired identifier byte contained the DUT, its crystal, and bypass capacitors (and voltage level shifters for the CULPRiT DUTs). This "DUT Board" was connected to the "Main Board" by a short 60-conductor ribbon cable. The Main Board had all other components required to complete the DUT Computer, including some which nominally are not necessary in some designs (such as external RAM, external ROM and address latch). The DUT Computer and the Test Control Computer were connected via a serial cable and communications were established between the two by the Controller (that runs custom designed serial interface software). This Controller software allowed for commanding of the DUT, downloading DUT Code to the DUT, and real-time error collection from the DUT during and post irradiation. A 1 Hz signal source provided an external watchdog timing signal to the DUT, whose watchdog output was monitored via an oscilloscope. The power supply was monitored to provide indication of latchup.VI. TEST SOFTWAREThe 8051 test software concept is straightforward. It was designed to be a modular series of small test programs each exercising a specific part of the DUT. Since each test was stand alone, they were loaded independently of each other for execution on the DUT. This ensured that only the desired portion of the 8051 DUT was exercised during the test and helped pinpoint location of errors that occur during testing. All test programs resided on the controller PC until loaded via the serial interface to the DUT computer. In this way, individual tests could have been modified at any time without the necessity of burning PROMs. Additional tests could have also been developed and added without impacting the overall test design. The only permanent code, which was resident on the DUT, was the boot code and serial code loader routines that established communications between the controller PC and the DUT.All test programs implemented:• An external Universal Asynchronous Receive and Transmit device (UART) for transmission of error information and communication to controller computer.• An external real-time clock for data error tag.•A watchdog routine designed to provide visual verification of 8051 health and restart test code if necessary.• A "foul-up" routine to reset program counter if it wanders out of code space.• An external telemetry data storage memory to provide backup of data in the event of an interruption in data transmission.The brief description of each of the software tests used is given below. It should be noted that for each test, the returned telemetry (including time tag) was sent to both the test controller and the telemetry memory, giving the highest reliability that all data is captured.Interrupt –This test used 4 of 6 available interrupt vectors (Serial, External, Timer0 Overflow, and Timer1 Overflow) to trigger routines that sequentially modified a value in the accumulator which was periodically compared to a known value. Unexpected values were transmitted with register information.Logic –This test performed a series of logic and math computations and provided three types of error identifications: 1) addition/subtraction, 2) logic and 3) multiplication/division. All miscompares of computations and expected results were transmitted with other relevant register information.Memory – This test loaded internal data memory at locations D:0x20 through D:0xff (or D:0x20 through D:0x080 for the CULPRiT DUT), indirectly, with an 0x55 pattern. Compares were performed continuously and miscompares were corrected while error information and register values were transmitted.Program Counter -The program counter was used to continuously fetch constants at various offsets in the code. Constants were compared with known values and miscompares were transmitted along with relevant register information. Registers – This test loaded each of four (0,1,2,3) banks of general-purpose registers with either 0xAA (for banks 0 and 2) or 0x55 (for banks 1 and 3). The pattern was alternated in order to test the Program Status Word (PSW) special function register, which controls general-purpose register bank selection. General-purpose register banks were then compared with their expected values. All miscompares were corrected and error information was transmitted.Special Function Registers (SFR) – This test used learned static values of 12 out 21 available SFRs and then constantly compared the learned value with the current one. Miscompares were reloaded with learned value and error information was transmitted.Stack – This test performed arithmetic by pushing and popping operands on the stack. Unexpected results were attributed to errors on the stack or to the stack pointer itself and were transmitted with relevant register information.VII. TEST METHODOLOGYThe DUT Computer booted by executing the instruction code located at address 0x0000. Initially, the device at this location was an EPROM previously loaded with "Boot/Serial Loader" code. This code initialized the DUT Computer and interface through a serial connection to the controlling computer, the "Test Controller". The DUT Computer downloaded Test Code and put it into Program Code RAM (located on the Main Board of the DUT Computer). It then activated a circuit which simultaneously performed two functions: held the DUT reset line active for some time (~10 ms); and, remapped the Test Code residing in the Program Code RAM to locate it to address 0x0000 (the EPROM will no longer be accessible in the DUT Computer's memory space). Upon awaking from the reset, the DUT computer again booted by executing the instruction code at address 0x0000, except this time that code was not be the Boot/Serial Loader code but the Test Code.The Test Control Computer always retained the ability to force the reset/remap function, regardless of the DUT Computer's functionality. Thus, if the test ran without a Single Event Functional Interrupt (SEFI) either the DUT Computer itselfor the Test Controller could have terminated the test and allowed the post-test functions to be executed. If a SEFI occurred, the Test Controller forced a reboot into Boot/Serial Loader code and then executed the post-test functions. During any test of the DUT, the DUT exercised a portion of its functionality (e.g., Register operations or Internal RAM check, or Timer operations) at the highest utilization possible, while making a minimal periodic report to the Test Control Computer to convey that the DUT Computer was still functional. If this reportceased, the Test Controller knew that a SEFI had occurred. This periodic data was called "telemetry". If the DUT encountered an error that was not interrupting the functionality (e.g., a data register miscompare) it sent a more lengthy report through the serial port describing that error, and continued with the test.VIII.DISCUSSIONA. Single Event LatchupThe main argument for why latchup is not an issue for the CULPRiT devices is that the operating voltage of 0.5 volts should be below the holding voltage required for latchup to occur. In addition to this, the cell library used also incorporates the heavy dual guard-barring scheme [4]. This scheme has been demonstrated multiple times to be very effective in rendering CMOS circuits completely immune to SEL up to test limits of 120 MeV-cm2/mg. This is true in circuits operating at 5, 3.3, and 2.5 Volts, as well as the 0.5 Volt CULPRiT circuits. In one case, a 5 Volt circuit fabricated on noncircuits wafers even exhibited such SEL immunity.B. Single Event UpsetThe primary structure of the storage unit used in the CULPRiT devices is the Single Event Resistant Topology (SERT) [5]. Given the SERT cell topology and a single upset node assumption, it is expected that the SERT cell will be completely immune to SEUs occurring internal to the memory cell itself. Obviously there are other things going on. The CULPRiT 8051 results reported here are quite similar to some resultsobtained with a CULPRiT CCSDS lossless compression chip (USES) [6]. The CULPRiT USES was synthesized using exactly the same tools and library as the CULPRiT 8051.With the CULPRiT USES, the SEU cross section data [7] was taken as a function of frequency at two LET values, 37.6 and 58.5 MeV-cm2/mg. In both cases the data fit well to a linear model where cross section is proportional to clock. In the LET 37.6 case, the zero frequency intercept occurred essentially at the zero cross section point, indicating that virtually all of these SEUs are captured SETs from the combinational logic. The LET 58.5 data indicated that the SET (frequency dependent) component is sitting on top of a "dc-bias" component –presumably a second upset mechanism is occurring internal to the SERT cells only at a second, higher LET threshold.The SET mitigation scheme used in the CULPRiT devices is based on the SERT cell's fault tolerant input property when redundant input data is provided to separate storage nodes. The idea is that the redundant input data is provided through a total duplication of combinational logic (referred to as “dual rail design”) such that a simple SET on one rail cannot produce an upset. Therefore, some other upset mechanism must be happening. It is possible that a single particle strike is placing an SET on both halves of the logic streams, allowing an SET to produce an upset. Care was taken to separate the dual sensitive nodes in the SERT cell layouts but the automated place-and-route of the combinatorial logic paths may have placed dual sensitive nodes close enough.At this point, the theory for the CULPRiT SEU response is that at about an LET of 20, the energy deposition is sufficiently wide enough (and in the right locations) to produce an SET in both halves of the combinatorial logic streams. Increasing LET allows for more regions to be sensitive to this effect, yielding a larger cross section. Further, the second SEU mechanism that starts at an LET of about 40-60 has to do with when the charge collection disturbance cloud gets large enough to effectively upset multiples of the redundant storage nodes within the SERT cell itself. In this 0.35 μm library, the node separation is several microns. However, since it takes less charge to upset a node operating at 0.5 Volts, with transistors having effective thresholds around 70 mV, this is likely the effect being observed. Also the fact that the per-bit memory upset cross section for the CULPRiT devices and the commercial technologies are approximately equal, as shown in Figure 9, indicates that the cell itself has become sensitive to upset.IX. SUMMARYA detailed comparison of the SEE sensitivity of a HBD technology (CULPRiT) utilizing the 8051 microcontroller as a test vehicle has been completed. This paper discusses the test methodology used and presents a comparison of the commercial versus CULPRiT technologies based on the data taken. The CULPRiT devices consistently show significantly higher threshold LETs and an immunity to latchup. In all but the memory test at the highest LETs, the cross section curves for all upset events is one to two orders of magnitude lower than the commercial devices. Additionally, theory is presented, based on the CULPRiT technology, that explain these results.This paper also demonstrates the test methodology for quantifying the level of hardness designed into a HBD technology. By using the HBD technology in a real-world device structure (i.e., not just a test chip), and comparing results to equivalent commercial devices, one can have confidence in the level of hardness that would be available from that HBD technology in any circuit application.ACKNOWLEDGEMENTSThe authors of this paper would like to acknowledge the sponsors of this work. These are the NASA Electronic Parts and Packaging Program (NEPP), NASA Flight Programs, and the Defense Threat Reduction Agency (DTRA).。
传感器中英文介绍
. sensorssensors(English name: transducer/sensor) is a kind of detection device, can feel the measured information, and will feel information transformation according to certain rule become electrical signal output, or other form of information needed to satisfy the information transmission, processing, storage, display, record and control requirements.Sensor's features include: miniaturization, digital, intelligent, multi-functional, systematic and network. It is the first step of automatic detection and automatic control. The existence and development of the sensor, let objects have sensory, such as touch, taste and smell let objects become live up slowly. Usually according to its basic cognitive functions are divided into temperature sensor, light sensor, gas sensor, force sensor, magnetic sensor, moisture sensor, acoustic sensor, radiation sensitive element, color sensor and sensor etc. 10 major categories.temperature transducerTemperature sensors (temperature transducer) refers to can feel temperature translates into usable output signal of the sensor. The temperature sensor is the core part of the temperature measuring instrument, wide variety. According to measuring methods could be divided into two types: contact and non-contact, according to the sensor material and electronic component features divided into two categories, thermal resistance and thermocouple.1 principle of thermocoupleThermocouple is composed of two different materials of metal wire, the welded together at the end. To measure the heating part of the environment temperature, can accurately know the temperature of the hot spots. Because it must have two different material of the conductor, so called the thermocouple. Different material to make the thermocouple used in different temperature range, their sensitivity is also each are not identical. The sensitivity of thermocouple refers to add 1 ℃hot spot temperature changes, the output variation of potential difference. For most of the metal material support thermocouple, this value about between 5 ~ 40 microvolt / ℃.As a result of the thermocouple temperature sensor sensitivity has nothing to do with the thickness of material, use very fine material also can make the temperature sensor. Also due to the production of thermocouple metal materials have good ductility, the slight temperature measuring element has high response speed, can measure the process of rapid change.Its advantages are:(1)high precision measurement. Because of thermocouple direct contact with the object being measured, not affected by intermediate medium.(2)the measurement range. Commonly used thermocouple from 1600 ℃to 50 ℃ ~ + sustainable measurement, some special thermocouple minimum measurable to - 269 ℃ (e.g., gold iron nickel chrome), the highest measurable to + 2800 ℃ (such as tungsten rhenium).(3) simple structure, easy to use. Thermocouple is usually composed of two different kinds of metal wire, but is not limited by the size and the beginning of, outside has protective casing, so very convenient to use. The thermocouple type and structure of the form.2. The thermocouple type and structure formation(1)the types of thermocoupleThe commonly used thermocouple could be divided into two types: standard thermocouple and non-standard thermocouple. Standard thermocouple refers to the national standard specifies its thermoelectric potential and the relationship between temperature, permissible error, and a unified standard score table of thermocouple, it has with matching display instrument to choose from. Rather than a standard thermocouple or on the order of magnitude less than the range to use standardized thermocouple, in general, there is no uniform standard, it is mainly used for measurement of some special occasions.Standardized thermocouple is our country from January 1, 1988, thermocouple and thermal resistance of all production according to IEC international standard, and specify the S, B, E, K, R, J, T seven standardization thermocouple type thermocouple for our country unified design.(2)to ensure that the thermocouple is reliable, steady work, the structure of thermocouple requirements are as follows:①of the two thermocouple thermal electrode welding must be strong;②two hot electrode should be well insulated between each other, in case of short circuit;③compensation wires connected to the free cod of a thermocouple to convenient and reliable;④protect casing thermal electrodes should be able to make sufficient isolation and harmful medium.3.The thermocouple cold end temperature compensationDue to the thermocouple materials are generally more expensive (especiallywhen using precious metals), and the temperature measurement points are generally more far, the distance to the instrument in order to save materials, reduce cost, usually adopt the compensating conductor) (the free end of the cold junction of the thermocouple to the steady control of indoor temperature, connected to the meter terminals. It must be pointed out that the role of the thermocouple compensation wire extension hot electrode, so that only moved to the control room of the cold junction of the thermocouple instrument on the terminal, it itself does not eliminate the cold end temperature change on the influence of temperature, cannot have the compensation effect. So, still need to take some of the other correction method to compensate of the cold end temperature especially when t0 indicates influence on measuring temperature 0 ℃.Must pay attention to when using thermocouple compensating conductor model match, cannot be wrong polarity, compensation conductor should be connected to the thermocouple temperature should not exceed 100 ℃.传感器传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
中英文文献翻译—汽车传感器

附录A: 英文文献与中文参考译文At89S51 monolithic integrated circuit is the low power loss which ATMEL Corporation promotes, the high performance CMOS8 position monolithic integrated circuit, internal including the 4K bytes programmable Flash read-only program memory, the component uses the ATMEL Corporation's high density, the non-volatility storage technology production, compatible standard 8051 command systems and pin, and already may use the online programming (ISP), also the available conventional routes carry on the programming and the general 8 microprocessors in the monolithic integrated circuit chip, the ATMEL Corporation's function is formidable, the low end AT89S51 monolithic integrated circuit provides many high performance-to-price ratios the application situations, but applies nimbly in each kind of control domain, the debugging is convenient.The sensor marched the automobile, medical, the industry and astronautics application domain on a large scale. Perhaps you not yet saw any changes . In safe, convenient, aspect day by day aggregate demands and so on entertainment as well as efficiency factor, in addition from all over the world politics the government office's law will enable sensor's application to obtain the unprecedented inflation.Besides estimated that sensor in wireless and consumable domain application sudden inflation, you will also understand why passed on the feeling producer to finish the rapid development huge market and the application domain hopefully before 2010. In these sensors the majority will be microcomputer electrical system series (MEMS) and the micro system technology (MST) type, as well as application prospect very broad micro sensor. regarding the automobile system, the sensor producer may discover the massive sensing application very easily, not only includes the survey to pass on the feeling pressure, moreover including through sensing system survey inertia, position, proximity, temperature, speed of flow, strength strong , tensity, torque, vibration and inclined condition. Uses in surveying these parameters the sensing technology to be various. Passes to believe with automobile technology center technical personnel Alex Cade that “the automobile domain's sensing demand is assuming the caper type to increase to be long.”He enumer ated the chassis control, the vehicles localization/position, the object survey, the vision to strengthen, the automobile environment to heat up , well ventilated, sensor's and so on airconditioning as well as engine and transmission control growth domains. The enhancement vehicles stability is only in numerous example one which his enumerates. US National highway Transportation Administrative bureau (NHTSA) vehicle increased recently about the side collision security aerocyst's proposition request in each steam on the two to six sensors. Although this proposition has not been forced the request use, but American, European and date the this automobile producer indicated that stemming from the security concern, they will finish before 2010 leans for all vehicles installment the surface collision security aerocyst. Certain automobile supplier, like TRW and Delphi ( the latter reaction rate the former quick) apply group of accelerometers and the pressure transmitter in the side collision security aerocyst. the automobile inertia sensing has become other hot spot. In fact, Motorola and Analog Devices () proposed that the use inertia sensor element group will manage massive will use in the vehicles tendency, guidance , the security and the electron s teering application sensing function (illustration 1). “the anti-lock braking system, the electronic braking force distribution system, follow the mark control system and of the initiative yaw control system interaction enable the automobile to have the dy namic stability,” Analog Devices said high-level using Engineer Harvey Weinberg. Motorola John P. Schuster adds: “the part group method may use core platform support many kinds of applications. It take astronautics gyroscope as the foundation, and the cost is low, the volume is small, may apply in the automobile.” light sensing technology budding the one kind used in the survey engine pressure by the Optrand development the new method using one kind of multi-purpose equipment, this equipment loaded one based on the optical fiber technology's pressure transmitter to use in diesel engine's preheating plug. Forced induction the preheating plug by one induction, a fiber optics and many signal control electronic component is composed, when the pressure surpasses 5 Pakistan , it refers to the frequency changer to be able water-cooled to provide 62% precisions, when the pressure is lower than 5 Pakistan, the error is lower than 0.2 Pakistan. this company estimated that will use this equipment for the first time in 2007. the Honeywell plan uses the light sensing technology in low cost's non-key input's passive system, the part uses this technique the technique the product to be possible to insert automobile's door knob. This sensor will contain one to be loaded with transceiver key shape optics Yuan . In order to enter in the vehicle, the vehicle owner has laid aside a key shapepart between the vehicle door knob and the automobile body. the Hall effect sensor will find in the numerous automobile functions applies the place, including induction deceleration and brake pedal's position, cam shaft position and rotational speed, barometric pressure as well as branch pipe absolute pressure (MAP). Infineon Technologies AG application Engineer Werner Roessler believed that active Hall effect sensor available in power transmission control as well as cam and crank and so on related application. “compares with the passive sensor, this has provided the higher accuracy, the better start strategy, and has surveys the crank to start a position ability,” he said. Melexis the Inc. plan uses in this technology inducing the non-contact position. new induction model the electric field induction use electrode and between them the electric field works. Freescale Semiconductor believed that its may use for to substitute the security aerocyst and other use sensor. “this induction method is helpful in makes the security aerocyst to intellectualize, because had not only considered passenger's forehead position (i.e. forehead whether to move?), moreover had considered passenger's volume and the weight, the aerocyst premature will not open,” Freescale application Engineer Don Laybourn said. this kind of sensor may install, in the border or other places have on electrode's steering wheel, like this may determine that the steering wheel is is loosened otherwise (for example, when a pilot falls asleep or cripples when), will then send out the warning signal. This method type may also let the vehicles with the stop slowly down. the vehicles seat electrode may when the vehicles go determined that in the pilot position nobody's situation carries on the brake to the vehicles. this will prevent the vehicles to enter the out of control condition, for example, when the automobile anchors when the pitch. The glass rain water and accumulates the frost to induce is other one kind of application.参考译文:单片机是ATMEL公司推出的低功耗,高性能CMOS8位单片机,片内含4K bytes 的可编程的Flash只读程序存储器,器件采用ATMEL公司的高密度、非易失性存储技术产生,兼容标准8051指令系统及引脚,并且既可采用在线编程(ISP),也可用传统方法进行编程及通用8位微处理器于单片机芯片中,ATMEL 公司的功能强大,低价位的AT89S51单片机提供许多高性价比的应用场合,可灵活应用于各种控制领域,调试非常方便,使用也非常灵活。
单片机温度探测系统中英文对照外文翻译文献
中英文对照翻译附件1:外文资料翻译译文一种基于DS18B20的温度探测系统摘要所有的DS18B20传感器,用于多点温度测试,IO总线与MCU连接,温度数据的轮流收集。
如果系统有大量的传感器,MCU的时间用在处理温度数据明显延长,因此周期替代测试变得更长。
在本文中,一种新的方法,DS18B20的合理组合和一些在软件上采取的措施,替代试验进展速度明显。
关键词:DS18B20的集团,温度测试,轮流测试所花费的时间。
引言由于结构简单,安装方便,低损失和广泛的用途的温度测试,DS18B20温度测试传感器应用领域,需要多点温度测试,如化学工业,粮食,环境监督管理等。
因为通过一个DS18B20的多点温度测试系统总线,所有DS18B20是挂在一条总线上,然后每个温度测试点的值转换轮流读。
作为转换后读值必须阅读8次引脚的状态,移动时间,位置和存储数据,所以时间多花费在阅读每一个点的数据系统时间。
如果温度测试系统是大型系统由它造成的损失是相当多的,然后交替测试系统的运行速度明显降低,从而影响多点温度测试系统的效率。
在本文中,DS18B20的一些I / O总线上都挂着分组DS18B20的均匀,温度转换获取数据读取DS18B20的状态,系统损耗减少和替代测试速度增加显然,这将不会影响精度和转换的可靠性。
一套点对多点温度,在此实现人工环境实验室测试,这增加了测试效率。
作者对DS18B20的认识DS18B20是单总线数字温度传感器来自美国达拉斯公司。
DS18B20是由64数字光盘刻激光,温度敏感性组成部分,非易失性温度报警触发器(设备TH和TL)。
DS18B20的通信微处理器单总线端口和测试范围DS18B20是从-55摄氏度到+125摄氏度,增量值是0.5摄氏度。
温度可在720ms的数字改为每个DS18B20具有唯一的64数字序号。
图1揭示的具体内容:两个8的数字储量(0号和1号),用于存储在DS18B20的温度值。
0号存储存储器温度值,补充和一号存储器温度值的符号。
智能压力传感器外文翻译文献

智能压力传感器外文翻译文献(文档含中英文对照即英文原文和中文翻译)译文:基于C8051F350的智能压力传感器的设计摘要为了克服传统的压力传感器的缺陷。
设计一种智能压力传感器,根据组合物的应用范围的智能传感器系统中,进行温度校正,充分考虑共同的组件之间的连接参数协调,我们选择了一个良好的可用性、高可靠性和低成本元件,80C51单片机进行控制和处理,对于整个测量系统组成而言,该系统具有自动测量、放大、A / D转换的温度和压力参数、微弱信号的锁定放大、相敏检波(PSD)、共模信号抑制、采集到的信号消噪处理、交叉敏感的脱钩的功能,并能够将结果显示,它还具有自动自检、温度补偿和上侧的通信和其它功能。
关键词:压力传感器,锁-放大器;80C51F350的单片机硬件电路手稿编号:1674-8042(2011)02-0157-04DIO:10.3969/j.issn.1674-8042.2011.02.141 引言随着时代的发展,电子计算机,自动化生产,调制解调器信息,军工,交通运输,化工,环保,能源,海洋开发,遥感,空间科学与技术,传感器的需求越来越大的发展,其应用已渗透进入该地区国民经济各个部门和人们的日常的日常文化生活。
可以说,从太空到海洋,从各种复杂的工程系统的基本日常生活的必需品不能分开从各种传感器,传感器技术,为国民经济的日益发展,起着巨大的作用。
然而。
目前市场上销售的智能传感器有许多不足之处,如单天资讯指标和质量参差不齐。
这样的设计总结了上述缺陷,以往的经验的基础上,使用锁相放大器,相敏检波,并巧妙地解决了有用信号从噪声中提取的低缺陷和问题的去耦的交叉灵敏度和使用的技术双电源供应电力,以及提高系统性能,增加新的故障诊断和使用一个共同的数字的接口技术和国际市场的通信协议等。
因此,有非常广阔的应用前景。
2 系统硬件设计智能传感器的传感器_信息的检测和处理。
智能传感器包括收集,处理,交流信息的功能。
它是集成传感器和微处理器的产品的组合。
单片机居家安全报警系统外文文献翻译

单片机居家安全报警系统外文文献翻译(含:英文原文及中文译文)英文原文Design of Home Safety Alarm System Based on Single Chip MicrocomputerAbstractThis design is to study the field of home safety alarm based on single-chip microcomputer, and design a home safety alarm system that is based on STC89C52 single chip microcomputer and is cost-effective and easy to install. The alarm system adopts the communication mode of wireless communication and GSM communication and the modular design concept. It detects different types of risk factors in the home environment through different types of sensor units, and feedbacks the environmental parameters of different rooms to the main control unit. The control unit makes corresponding decisions and issues alarm instructions when necessary to ensure the safety of the home environment. The system is simple and convenient to operate and has a high degree of intelligence. It can detect home risk factors and prevent dangerous accidents.Keywords: home security alarm system; wireless communication; GSM1 Introduction1.1 Hidden dangers and detection in modern home lifeIn the modern home life, people cannot live without convenient living materials such as running water, electricity, and natural gas. However, they bring convenience to us and also increase the unsafe factors in the home life, leaking water pipes, accidental fires, gas leaks, etc. An accident can bring irreparable damage to the family. With the increasing population of the city and the increasing mobility of the population, the crime rate of theft and house robbery has been high for many years. Traditional anti-theft doors and windows have a certain preventive effect, and there are also many security risks. A wide variety of decoration materials, furniture, and decorative items provide us with convenience and beautify the home while alsocontaminating formaldehyde. Therefore, the safety of the home environment has received increasing attention in recent years. How to create a comfortable, healthy and safe home environment has become a hot topic of common concern. In recent years, electronic technology has been changing with each passing day, and communication technology is flourishing. Among them, the development of chip technology and sensor technology is particularly prominent, which provides new options for the solution of home security issues. The use of a home safety alarm device with a microcontroller and a sensor as its core enables the detection of various risk factors in the home, such as gas concentration, formaldehyde content, leakage of water pipes, and theft of rooms, etc. The system can perform remote alarms in a timely manner and notify the user Solve it.1.2 Selected topics and meaningWith the rapid development of science and technology and economic level, people's requirements for the home environment have evolved from the initial satisfaction of simple housing development to the emphasis on the human needs of residential housing. As a result, many safe, comfortable, fast, and convenient smart communities have emerged. where safety is the primary goal. In addition to human factors, the establishment of security systems is an indispensable and important measure for the realization of smart residential security.At present, there are many types of home security products on the market, which can be roughly divided into several relatively independent categories such as anti-theft alarms, video surveillance, and access control systems. Some products have fewer functions, and products with more comprehensive functions have relatively higher prices. Installation is complicated. In other words, there is an urgent need for a product that requires a price to be popular, strong functions, simple installation, easy use, reliable work, and low false alarm rate. Therefore, starting from the actual application, this article systematically elaborates that the use of the system does not need to change the power lines in the home. It has low cost, does not affect aesthetics, wireless communication, and is easy to use. It is suitable for general househo ld use. Home security is closely related to each of us. The use of home security alarm devicescan improve the quality of life of people and make life more secure and convenient. Because of the advantages of the system and the unmatched price/performance ratio of the 51 series microcontrollers, it will be used in future development. Has a broad market prospects and development potential.1.3 Research Status and Development Trends at Home and AbroadIn recent years, with the rapid development of electronic information technology, computer technology, communication technology and sensor technology, there are more and more products related to home security alarms. Domestic and foreign companies such as Siemens, Honeywell, Bosch, Shenzhen Yingmao and many other companies have developed a series of home security alarm products. They generally have wired or wireless communication functions to complete some alarm functions and have carried out Successful application. For example, Siemens' product portfolio includes general-purpose security and security solutions and services, including access control systems, intrusion detection, video surveillance systems, on-site service control centers, and emergency management systems. Thanks to the installation of the Siemens fire and voice evacuation system, the Jinmao Tower and the Grand Hyatt Shanghai, the world's top hotel, provide safe and comfortable working and living environments for thousands of people. It can be foreseen that the smart residential community will become the development trend of the construction industry in the future, and the home security alarm system will become an integral part of the intelligent residential community. In particular, as people's living standards improve, people using home security alarm system equipment will More and more, people's lives will be more comfortable and safer.2 home security alarm system overall design2.1 Overall Design Scheme of Home Security Alarm SystemThe design of this system is a new home security alarm system that integrates single-chip microcomputer control technology, sensor detection technology, and communication technology. The system is based on the single-chip microcomputer and consists of various detection units placed in different rooms and main control units responsible for decision-making. Each detection unit is responsible for detectingvarious conditions of the indoor environment, such as temperature, humidity, formaldehyde content, leaking water, etc., and then sending the collected data to the main control unit through wireless communication, and the main control unit makes a decision and issues a corresponding The instruction controls the operation of the system, thus realizing the automatic detection and automatic alarm of the indoor environment and maintaining the safety of the indoor environment. The hardware of the system consists of eight parts: main control unit, fire detection unit, water leakage detection unit, anti-theft detection unit, gas leak detection unit, formaldehyde content detection unit, wireless communication module, and GSM network communication module. Ensure the normal operation of the system. The circuit of the system is mainly composed of a power supply module, a microcontroller module, a sensor module, a wireless module, a display module, and an alarm module.2.2 main control unitThe main control unit, as the control center of the system, is responsible for receiving the information of each detection unit through the wireless module, processing the information, finding the alarm information to issue a corresponding alarm, and promptly notifying the user for processing. The main control unit can complete tasks such as GSM network SMS alarm, sound and light alarm, LED screen display, and keyboard control. The GSM short message module is used to send and receive short messages so as to monitor home security. A variety of sensors are used to collect home information, and information fusion technology is used to obtain more reliable alarm information. After receiving the alarm information, the owner responded to the SMS to control and handle the situation on the site, so as to ensure home security and theft prevention. The system is simple in structure, easy to install and debug, and easy to use.DetectorThe detector is used to detect various environmental information in the room. The environmental information is sent to the main control unit so that the main control unit can process the information in time according to the information. The sensor is the core component of the detector. According to the detection situation,sensors of different types and different principles constitute different detectors. The detectors involved in the system mainly include the following types:(1) Fire detectorFire detectors are mainly installed in the kitchen. It uses a combination of smoke sensors and temperature and humidity sensors. Smoke sensors mainly include ion smoke sensors and photoelectric smoke sensors. The system uses ion smoke sensors. The ionized smoke sensor contains an internal radiation source 241. The current and voltage of the ionization chamber inside and outside the sensor are stable under normal conditions. When a fire occurs, the ionization chamber ionizes positive and negative ions under the action of an electric field. The two io ns move toward the positive and negative poles, and the internal current and voltage change to generate an alarm signal. The temperature and humidity sensor can convert the temperature and humidity of the environment into analog signals. These analog signals are converted into digital signals that can be processed by the MCU under the action of their own processing chip. In the event of a fire, the temperature and humidity in the room will rise sharply within a short period of time. Comprehensive temperature and humidity conditions can prevent false alarms due to external interference from the smoke sensor.(2) Water leak detectorThe leak detector is mainly installed in the bathroom. Its working principle is mainly to use the conductive characteristics of water. The two probes of the detector are installed slightly higher than the ground, and are respectively connected to an I/O pin and GND pin of the microcontroller. When water leakage occurs, the water level is higher than the height of the probe. The two probes of the detector are turned on, and the level of the I/O pin of the microcontroller is set low to generate an alarm signal.(3) Theft detectorThe anti-theft detector is installed above the window. The detection part is mainly composed of pyroelectric and infrared sensors. When a gangster enters through the window, pyroelectric and infrared laser sensors can generate alarm signalsat the same time. The combination of the two sensors can prevent false alarms caused by small animals or accidents. An important component of a pyroelectric sensor is a piezoelectric ceramic dielectric that maintains its polarization after being poled, known as spontaneous polarization. Spontaneous polarization decreases with increasing temperature and drops to zero at the Curie point. Therefore, when this material is exposed to infrared radiation and the temperature rises, the surface charge will decrease, which corresponds to the release of a part of the charge and is therefore called pyroelectricity. The released charge can be converted to a voltage output via an amplifier, thereby generating an alarm signal. When radiation continues to act on the pyroelectric element to balance its surface charge, it no longer releases charge. Therefore, pyroelectric sensors cannot detect constant infrared radiation. The infrared detector employs a photoelectric switch. The photoelectric switch (photoelectric sensor) is an abbreviation of the photoelectric proximity switch. It uses the object to block or reflect the light beam and strobes the circuit by a synchronous circuit to detect the presence or absence of an object. The photoelectric switch converts the input current into an optical signal on the transmitter, and the receiver then detects the target object according to the received light intensity or presence or absence.(4) Gas leak detectorThe gas is mainly composed of hydrogen, methane, carbon monoxide, and ethylene, and the natural gas is mainly composed of methane, ethane, propane, and other components. It can be seen that in both gases, methane is an important component of them. By detecting the methane content, it can be determined whether gas or natural gas leaks occur. The methane sensor converts the information related to the methane concentration into analog signals. These analog signals can be converted into digital signals by the A/D chip and sent to the microcontroller. The microcontroller can obtain the indoor methane content according to the size of the digital data. Calculate the concentration of gas and natural gas so that detection and alarm can be achieved.(5) Formaldehyde detectorFormaldehyde is generally considered to be the number one killer of the indoorenvironment. Its release period is generally 3-15 years, and its harm is very serious for the human body, especially infants, pregnant women, the elderly and chronic patients. Formaldehyde mainly exists on the floor, decoration plates, furniture, carpets, paints, and glue. People can easily overlook its existence, but it can cause serious damage to people's health. The formaldehyde sensor uses the electrochemical formaldehyde gas sensor HCHO produced by Dart Sensor. This sensor is developed based on a breath alcohol sensor and is suitable for monitoring in most environments (-20°C~+50°C) (for special applications, it can be used at higher temperatures). This sensor is simple in design, with few components and its cost is reduced. It does not require power supply excitation. It only requires power during signal processing and display, so it is only a simple small battery cell.communication deviceThis system mainly adopts wireless communication methods, which avoids complicated laying of lines and is both beautiful and convenient. The main control unit and each subunit communicate with the wireless module 24L01. The effective range is 60 meters, which fully meets the needs of home use. The communication between the main control unit and the user adopts the GSM (mobile phone network) method. The alarm system can send the information in the home to the user as a short message. The user can also control the running of the home system by sending an SMS.Home Security Alarm System Functions and Working PrinciplesThe main control unit of the system can be placed in the living room, and the detection unit can be installed in different rooms of the house. For example, the fire detection unit is installed in the kitchen, the leak detection unit may be installed in the toilet, the anti-theft alarm detection unit is installed above the door and window, the gas leak detection unit is installed in the kitchen, and the formaldehyde content detection unit is placed in the living room or the bedroom. The detection unit placed in different locations sends information to the main control unit in real time through the wireless device. Once a fire, leaking water pipe, burglary, or gas leak occurs, the main control unit will immediately receive an alarm signal. Then the main control unitThe unit will judge and process the alarm signal, get the alarm type, make an audible and visual alarm, and notify the user through the GSM network. The home security alarm system has six main functions: Mobile phone network intelligent alarm. When an unexpected situation in the home is detected, an alarm is sent through a text message. It can monitor the concentration of gas or natural gas in the home, discover gas leaks, and promptly report an alarm. Anti-theft function, when a thief enters, immediately makes an alarm, and promptly informs the police and the household head; Intelligent fire alarm, immediately when the fire occurs in the home, to alarm, to reduce the loss of property; Intelligent waterproof detection function, found a leak in the home, timely closure of the main valve, And notify the owner by SMS to avoid the loss; The system can be controlled by the remote controller, which is easy to use and easy to operate.3 Hardware Design of Home Security Alarm System3.1 Design of the main control unitThe main controller consists of power supply, GSM communication module, wireless communication module, display device, button, and remote controller. The structure is shown in the figure.Figure 3 main control unit system diagram Power section uses the AC220/DC5V power supply module, after the power supply voltage transformer voltage regulator, and finally get a stable 5V voltage to the microcontroller and other electrical equipment. The display device uses 12864 liquid crystal, 12864 is the abbreviation of dot matrix number of 128*64 dot matrix LCD module, 12864 LCD with Chinese font library can display 4 rows and 8 columns of 32 characters with 16 16 dot matrix, each The display RAM can display 1 Chinese character or 2 16×8 lattice full height ASCII code characters, that is, each display can display up to 32 Chinese characters or 64 ASCII characters. The display of indoor and outdoor temperature, humidity, light intensity, and system working status is realized through the liquid crystal, so that people can understand the working status of the system in real time. The basic circuit for displaying the liquid crystal is shown in Figure 4. Figure 4 LCD connection circuit diagram The GSM mobile network communication module is selected from theSiemens TC35 module, which is a dual-band 900/1800MHz highly integrated GSM module, it is easy to integrate, cost-effective, good product quality and performance The system guarantees that the system communicates with the user's mobile phone via SMS, which is convenient and quick. The GSM module can transmit voice and data signals and connect the SIM card reader and antenna respectively through the interface connector and antenna connector. The automatic baud rate is 1.2kb/s~115kb/s. It supports Short Message Service (SMS) in Text and PDU formats, and can send text messages and make phone calls. The module expansion circuit is shown in Figure 5, and the features are described below. Information transmission content: V oice and data power: Single power supply 3.3V ~ 5.5V Frequency band: Dual-band GSM900MHz and DCS1800MHz (Phase 2+) Transmitting power: 2W (GSM900MHz Class 4) 1W (DCS1800MHz Class 1) 8SIM Card Connection: External Antenna: External antenna connected by antenna connector Talk mode: 300mA (Typ.) Figure 5 TC35 peripheral expansion circuit diagram The wireless communication device uses the 24L01 wireless module, and the maximum operating speed is 2Mbps. It is highly efficient GFSK modulation and has strong anti-interference ability. Up to 126 available channels to meet the needs of multi-point communication and frequency hopping communication, built-in hardware CRC error detection and point-to-multipoint communication address control; Low power consumption 1. 9 - 3. 6V operation, 22uA in standby mode Under power-down mode is 900nA; Built-in 2. 4Ghz antenna, small and exquisite; The module can be set by software address, can be directly used by various microcontrollers, software programming is very convenient. When connecting with P0 port of 51 series single-chip microcomputer, it needs to add 10K pull-up resistor and it is not necessary to connect with other ports. For other series of microcontrollers, if it is 5V, please refer to the output current of the IO of this series of microcontrollers. If it exceeds 10mA, series resistor divider is required. If it is 3. 3V, it can be directly connected to the IO line of the RF2401 module. For example, if A VR series microcontrollers are 5V, they are generally connected in series with 2K resistors. The keypad is used to set the basic parameters of the main control unit. It can also set the parameters through theSAA3010T remote control. The remote control receiver uses HS0038. The connection circuit with the microcontroller is shown in Figure 6. Figure 6 Infrared remote control receiver circuit we use the receiver head, its drive circuit is simple, easy to control the microcontroller. Its operation method is the same as that of an ordinary TV remote controller, and the operation is simple and easy to use.3.2 Design of fire detection unitThe fire alarm unit is composed of a smoke sensor and a temperature and humidity sensor. The increase of the temperature and humidity sensor can enhance the reliability of the alarm and reduce the occurrence of false alarms. The composition of the fire alarm unit is shown in Figure 8. Fig. 8 System diagram of fire detection unit The smoke sensor converts the collected smoke concentration into an analog signal. After the A/D chip, the analog signal is converted into a digital signal and sent to the microcontroller. Temperature and humidity sensor The DH11 can send temperature and humidity in digital form to the microcontroller, so the signal does not have to be processed. The MCU sends the received information to the master control unit through the wireless communication module 24L01. The type of smoke sensor used in the system is MQ-2. The gas sensitive material used by MQ-2 is tin dioxide (SnO2) with low conductivity in clean air, and its sensitivity to smoke is very high.3.3 Design of leak detection unitThe unit's design mainly utilizes the conductive properties of water. There are two detection probes connected to the microcontroller, which are connected to the I/O pin and the GND pin of the microcontroller. When in use, put the two probes above the bathroom floor. When there is water leakage, the toilet will produce water. The two probes of the detector are connected to the stagnant water. The preset high-level I/O pins are set low. , Generate an alarm signal, the microcontroller then sends the alarm signal to the main control unit through the wireless communication module, thus completing the entire alarm process. The specific structure of the alarm unit is shown in Figure 11.3.4 Design of Gas Leak Detection UnitThe gas leak detection unit is mainly composed of a methane content displayliquid crystal, a methane sensor, a wireless communication module, and a buzzer alarm. The structure is shown in FIG. Figure 12 shows the gas leakage detection unit system. Among them, the liquid crystal display is a 5110 liquid crystal display. Its features are: Cost-effective, LCD1602 can display 32 characters, and Nokia5110 can display 15 Chinese characters, 30 characters, Nokia5110 bare screen only 8. 8 yuan, LCD1602 generally about 15 yuan, LCD12864 generally 50 to 70 yuan; interface is simple, only four I / O lines can drive, LCD1602 need 11 I / O lines, LCD12864 need 12 root. The speed is 20 times that of the LCD12864 and 40 times that of the LCD1602. The model selected for the methane sensor is GJ4. Its output is analog and needs to be sent to the microcontroller via A/D conversion. Its use is similar to the smoke sensor.3.5 Design of formaldehyde monitoring unitFormaldehyde detection unit is mainly composed of formaldehyde sensor, operational amplifier, wireless communication module and sound and light alarm. The formaldehyde sensor converts the formaldehyde concentration into electrical signals. The signal is processed by the operational amplifier and then input to the single-chip microcomputer. The single-chip microcomputer judges the signal and sends the formaldehyde content signal to the main control unit through the wireless communication module. The sensor contains a conventional two-electrode fuel cell sensor. The working electrode discharges electrons to the counter electrode through an external circuit and is consumed at the counting electrode end with the reduction of oxygen. The internal circuit is realized by the ion current in the electrolyte. Well-designed to facilitate the growth of electrolyte. The rise and fall of the electrolyte varies with the changes in ambient temperature and humidity, but the normal operation will not affect the calibration value. The specific circuit shown in Figure.3.6 Design of anti-theft alarm unitThe anti-theft alarm unit is a double detector consisting of a pyroelectric sensor and an infrared sensor. Compared with conventional pyroelectric or infrared single sensor systems, Shuangjian detectors have significantly reduced their false alarm rates.When the Shuangjian detector works, the two signals of the pyroelectric sensor and the infrared sensor are processed by the NAND gate and sent to the SCM. When only two sensors respond at the same time, the detector sends an alarm signal to the microcontroller, otherwise no alarm signal is generated. In addition, when designing, Fresnel lens is added to the pyroelectric sensor, and the principle diagram of false alarms that can reduce the external interference signal by changing the lens division method is shown in Fig.16. Fig. 16 System diagram of the anti-theft alarm unit When the double-detection detector works, the pyroelectric sensor and the infrared sensor signal are sent to the single-chip microcomputer after being processed by a NAND gate. When only two sensors respond at the same time, the detector sends an alarm signal to the microcontroller, otherwise no alarm signal is generated. In addition, Fresnel lens is added to the pyroelectric sensor during design. By changing the lens segmentation mode, false alarms due to external interference signals can be reduced. 3.7 Design of Communication SectionThe communication part of this system is mainly composed of GSM mobile network communication module and 24L01 wireless communication module. The GSM module communicates with the user's mobile phone through the mobile phone network of the mobile phone, and the user can understand the security situation at home at any time. Each detection unit communicates with the main control unit through the wireless communication module and feeds back the detected information to the main control unit in time. System Communication Structure Diagram The GSM mobile network communication module uses the TC35 module. Its main features are wide coverage, low cost, reliable quality, and high security. It inherits the standard A T instruction set and RS232 interface standard internally, which makes it easie r for the microcontroller system to control it. It reduces the design of external circuits and simplifies the programming of the program. The hardware circuit is not complicated, but there are many modules used, which increases the complexity of programming and the difficulty of debugging. Therefore, it is necessary to debug each module individually after being debugged by the single chip microcomputer. Communication module application circuit diagram SIM CARD is a mobile communication networkuser identification module. SIM CARD contains the user's user information and is an indispensable tool for communication with mobile phones. There are 6 pins corresponding to each other on the SIM card and the card holder. This is the interface between SIM CARD and TC35. The wireless communication part adopts 24L01 wireless communication module, which has built-in 2. 4Ghz antenna, small size, software address, software programming is very convenient, built-in special voltage regulator circuit, using a variety of power supply including DC/DC switching power supply are very good The communication effect, when connected to the P0 port of the 51 series single-chip microcomputer, requires a pull-up resistor of 10K, and it is not necessary to connect to other ports. The user can set the alarm phone number, alarm mode, work mode, etc. through the keypad. Through the liquid crystal display, you can clearly understand the operating conditions of the system and the environmental parameters in your home, such as temperature, humidity, gas concentration, formaldehyde concentration, leaks, and communication conditions.中文译文基于单片机的居家安全报警系统的设计摘要本设计是对基于单片机的居家安全报警领域进行研究,设计出以STC89C52 单片机为核心的高性价比,易于安装的居家安全报警系统。
毕业论文外文文献翻译Sensor-technology传感器技术

毕业论文外文文献翻译Sensor-technology传感器技术毕业设计(论文)外文文献翻译文献、资料中文题目:传感器技术文献、资料英文题目:Sensor-technology文献、资料来源:文献、资料发表(出版)日期:院(部):专业:班级:姓名:学号:指导教师:翻译日期: 2017.02.14Sensor technologyA sensor is a device which produces a signal in response to its detecting or measuring a property ,such as position , force , torque , pressure , temperature , humidity , speed , acceleration , or vibration .Traditionally ,sensors (such as actuators and switches )have been used to set limits on the performance of machines .Common examples are (a) stops on machine tools to restrict work table movements ,(b) pressure and temperature gages with automatics shut-off features , and (c) governors on engines to prevent excessive speed of operation . Sensor technology has become an important aspect of manufacturing processes and systems .It is essential for proper data acquisition and for the monitoring , communication , and computer control of machines and systems .Because they convert one quantity to another , sensors often are referred to as transducers .Analog sensors produce a signal ,such as voltage ,which is proportional to the measured quantity .Digital sensors have numeric or digital outputs that can be transferred to computers directly .Analog-to-coverter(ADC) is available for interfacing analog sensors with computers .Classifications of SensorsSensors that are of interest in manufacturing may be classified generally as follows:Machanical sensors measure such as quantities aspositions ,shape ,velocity ,force ,torque , pressure , vibration , strain , and mass .Electrical sensors measure voltage , current , charge , and conductivity .Magnetic sensors measure magnetic field ,flux , and permeablity .Thermal sensors measure temperature , flux ,conductivity , and special heat .Other types are acoustic , ultrasonic , chemical , optical , radiation , laser ,and fiber-optic .Depending on its application , a sensor may consist of metallic , nonmetallic , organic , or inorganic materials , as well as fluids ,gases ,plasmas , or semiconductors .Using the special characteristics of these materials , sensors covert the quantity or property measured to analog or digital output. The operation of an ordinary mercury thermometer , for example , is based on the difference between the thermal expansion of mercury and that of glass.Similarly , a machine part , a physical obstruction , or barrier in a space can be detected by breaking the beam of light when sensed by a photoelectric cell . A proximity sensor ( which senses and measures the distance between it and an object or a movingmember of a machine ) can be based on acoustics , magnetism , capacitance , or optics . Other actuators contact the object and take appropriate action ( usually by electromechanical means ) . Sensors are essential to the conduct of intelligent robots , and are being developed with capabilities that resemble those of humans ( smart sensors , see the following ).This is America, the development of such a surgery Lin Bai an example, through the screen, through a remote control operator to control another manipulator, through the realization of the right abdominal surgery A few years ago our country the exhibition, the United States has been successful in achieving the right to the heart valve surgery and bypass surgery. This robot has in the area, caused a great sensation, but also, AESOP's surgical robot, In fact, it through some equipment to some of the lesions inspections, through a manipulator can be achieved on some parts of the operation Also including remotely operated manipulator, and many doctors are able to participate in the robot under surgery Robot doctor to include doctors with pliers, tweezers or a knife to replace the nurses, while lighting automatically to the doctor's movements linked, the doctor hands off, lighting went off, This is very good, a doctor's assistant.Tactile sensing is the continuous of variable contact forces , commonly by an array of sensors . Such a system is capable of performing within an arbitrarythree-dimensional space .has gradually shifted from manufacturing tonon-manufacturing and service industries, we are talking about the car manufacturer belonging to the manufacturing industry, However, the services sector including cleaning, refueling, rescue, rescue, relief, etc. These belong to the non-manufacturing industries and service industries, so here is compared with the industrial robot, it is a very important difference. It is primarily a mobile platform, it can move to sports, there are some arms operate, also installed some as a force sensor and visual sensors, ultrasonic ranging sensors, etc. It’s surrounding environment for the conduct of identification, to determine its campaign to complete some work, this is service robot’s one of the basic characteristicsIn visual sensing (machine vision , computer vision ) , cameral optically sense the presence and shape of the object . A microprocessor then processes the image ( usually in less than one second ) , the image is measured , and the measurements are digitized ( image recognition ) .Machine vision is suitable particularly for inaccessible parts , in hostile manufacturing environments , for measuring a large number of small features , and in situations where physics contact with the part may cause damage .Small sensors have the capability to perform a logic function , to conducttwo-way communication , and to make a decisions and take appropriate actions . The necessary input and the knowledge required to make a decision can be built into a smart sensor . For example , a computer chip with sensors can be programmed to turn a machine tool off when a cutting tool fails . Likewise , a smart sensor can stop a mobile robot or a robot arm from accidentally coming in contact with an object or people by using quantities such as distance , heat , and noise .Sensor fusion . Sensor fusion basically involves the integration of multiple sensors in such a manner where the individual data from each of the sensors ( such as force , vibration ,temperature , and dimensions ) are combined to provide a higher level of information and reliability . A common application of sensor fusion occurs when someone drinks a cup of hot coffee . Although we take such a quotidian event for granted ,it readily can be seen that this process involves data input from the person's eyes , lips , tongue , and hands .Through our basic senses of sight , hearing , smell , taste , and touch , there is real-time monitoring of relative movements , positions , and temperatures . Thus if the coffee is too hot , the hand movement of the cup toward the lip is controlled and adjusted accordingly .。
传感器技术外文文献及中文翻译

传感器技术外文文献及中文翻译Sensor technologyA sensor is a device which produces a signal in response to its detecting or measuring a property ,such as position , force , torque , pressure , temperature , humidity , speed , acceleration , or vibration .Traditionally ,sensors (such as actuators and switches )have been used to set limits on the performance of machines .Common examples are (a) stops on machine tools to restrict work table movements ,(b) pressure and temperature gages with automatics shut-off features , and (c) governors on engines to prevent excessive speed of operation . Sensor technology has become an important aspect of manufacturing processes and systems .It is essential for proper data acquisition and for the monitoring , communication , and computer control of machines and systems .Because they convert one quantity to another , sensors often are referred to as transducers .Analog sensors produce a signal , such as voltage ,which is proportional to the measured quantity .Digital sensors have numeric or digital outputs that can be transferred to computers directly .Analog-to-coverter(ADC) is available for interfacing analog sensors with computers .Classifications of SensorsSensors that are of interest in manufacturing may be classified generally as follows:Machanical sensors measure such as quantities aspositions ,shape ,velocity ,force ,torque , pressure , vibration , strain , andmass .Electrical sensors measure voltage , current , charge , and conductivity .Magnetic sensors measure magnetic field ,flux , and permeablity .Thermal sensors measure temperature , flux ,conductivity , and special heat .Other types are acoustic , ultrasonic , chemical , optical , radiation ,laser ,and fiber-optic .Depending on its application , a sensor may consist of metallic , nonmetallic , organic , or inorganic materials , as well as fluids ,gases ,plasmas , or semiconductors .Using the special characteristics of these materials , sensors covert the quantity or property measured to analog or digital output. The operation of an ordinary mercury thermometer , for example , is based on the difference between the thermal expansion of mercury and that of glass.Similarly , a machine part , a physical obstruction , or barrier in a space can be detected by breaking the beam of light when sensed by a photoelectric cell . A proximity sensor ( which senses and measures the distance between it and an object or a moving member of a machine ) can be based on acoustics , magnetism , capacitance , or optics . Other actuators contact the object and take appropriate action ( usually by electromechanical means ) . Sensors are essential to the conduct of intelligent robots , and are being developed with capabilities that resemble those of humans ( smart sensors , see the following ).This is America, the development of such a surgery Lin Bai an example,through the screen, through a remote control operator to control another manipulator, through the realization of the right abdominal surgery A few years ago our country the exhibition, the United States has been successful in achieving the right to the heart valve surgery and bypass surgery. This robot has in the area, caused a great sensation, but also, AESOP's surgical robot, In fact, it through some equipment to some of the lesions inspections, through a manipulator can be achieved on some parts of the operation Also including remotely operated manipulator, and many doctors are able to participate in the robot under surgery Robot doctor to include doctors with pliers, tweezers or a knife to replace the nurses, while lighting automatically to the doctor's movements linked, the doctor hands off, lighting went off, This is very good, a doctor's assistant.Tactile sensing is the continuous of variable contact forces , commonly by an array of sensors . Such a system is capable of performing within an arbitrary three-dimensional space .has gradually shifted from manufacturing tonon-manufacturing and service industries, we are talking about the car manufacturer belonging to the manufacturing industry, However, the services sector including cleaning, refueling, rescue, rescue, relief, etc. These belong to the non-manufacturing industries and service industries, so here is compared with the industrial robot, it is a very important difference. It is primarily a mobile platform, it can move to sports, there are some arms operate, also installed some as a force sensor and visual sensors, ultrasonic ranging sensors, etc. It’s surrounding environment for the conduct of identification, to determine its campaign to complete some work, this is service robot’s one of the basic characteristicsIn visual sensing (machine vision , computer vision ) , cameral optically sense the presence and shape of the object . A microprocessor then processes the image ( usually in less than one second ) , the image is measured , and the measurements are digitized ( image recognition ) .Machine vision is suitable particularly for inaccessible parts , in hostile manufacturing environments , for measuring a large number of small features , and in situations where physics contact with the part may cause damage .Small sensors have the capability to perform a logic function , to conduct two-way communication , and to make a decisions and take appropriate actions . The necessary input and the knowledge required to make a decision can be built into a smart sensor . For example , a computer chip with sensors can be programmed to turn a machine tool off when a cutting tool fails . Likewise , a smart sensor can stop a mobile robot or a robot arm from accidentally coming in contact with an object or people by using quantities such as distance , heat , and noise .Sensor fusion . Sensor fusion basically involves the integration of multiple sensors in such a manner where the individual data from each of the sensors ( such as force , vibration , temperature , and dimensions ) are combined to provide a higher level of information and reliability . A common application ofsensor fusion occurs when someone drinks a cup of hot coffee . Although we take such a quotidian event for granted ,it readily can be seen that this process involves data input from the person's eyes , lips , tongue , and hands .Through our basic senses of sight , hearing , smell , taste , and touch , there is real-time monitoring of relative movements , positions , and temperatures . Thus if the coffee is too hot , the hand movement of the cup toward the lip is controlled and adjusted accordingly .The earliest applications of sensor fusion were in robot movement control , missile flight tracking , and similar military applications . Primarily because these activities involve movements that mimic human behavior . Another example of sensor fusion is a machine operation in which a set of different but integrated sensors monitors (a) the dimensions and surface finish of workpiece , (b) tool forces , vibrations ,and wear ,(c) the temperature in various regions of the tool-workpiece system , and (d) the spindle power .An important aspect in sensor fusion is sensor validation : the failure of one particular sensor is detected so that the control system maintains high reliability . For this application ,the receiving of redundant data from different sensors is essential . It can be seen that the receiving , integrating of all data from various sensors can be a complex problem .With advances in sensor size , quality , and technology and continued developments in computer-control systems , artificial neural networks , sensor fusion has become practical and available at low cost .Movement is relatively independent of the number of components, the equivalent of our body, waist is a rotary degree of freedom We have to be able to hold his arm, Arm can be bent, then this three degrees of freedom, Meanwhile there is a wrist posture adjustment to the use of the three autonomy, the general robot has six degrees of freedom. We will be able to space the three locations, three postures, the robot fully achieved, and of course we have less than six degrees of freedom Fiber-optic sensors are being developed for gas-turbine engines . These sensors will be installed in critical locations and will monitor the conditions inside the engine , such as temperature , pressure , and flow of gas . Continuous monitoring of the signals from thes sensors will help detect possible engine problems and also provide the necessary data for improving the efficiency of the engines .传感器技术传感器一种通过检测某一参数而产生信号的装置。
外文文献翻译_压电传感器测定动脉脉搏波速度

Piezoelectric sensor determination of arterial pulse wave velocityArterial pulse wave velocity (APWV) is a measure of the elasticity (or stiffness) of peripheral arterial blood vessels. The pulse referred to here will be the pressure pulse as opposed to the flow pulse measured by ultrasound Doppler.The pressure pulse velocity varies over the range from about 12 m s?1 to15 m s?1 in stiff peripheral arteries, whereas in normal arteriesit has a velocity in the range of 7 to 9 m s?1.The aim of this project was the development of a fast and easy to use system for the determination of peripheral arterial pulse wave velocity. The principle of the PWV measurement is based on simultaneous measurement of two pulse waves at two different positions, such as the radial artery at the wrist and the brachial artery just above the elbow. By determining the pulse transit time between these points and the distance measured between the two locations, pulse wave velocity may then be calculated. The pressure pulse detection is done by using two piezoelectric sensors which generate a measurable voltage at the output contacts if they are mechanically deformed. The deformation produced voltage is first amplified and filtered and then digitalized with a data acquisition card. The analysis of the data obtained from the sensors includes a filtering process, the calculation of the PWV with three different methods— foot-to-foot, cross-correlation and peak-to-peak—and the determination of the arterial pulse rate.Extensive measurements with human test subjects were carried out to optimize the techniques of data acquisition and analysis. For example, it was found that the best procedure was to hold the sensors in place using elastic straps alone. The data analysis was upgraded with an additional software module, which deletes, in effect, outriders or invalid measurements. With the optimized system, a series involving eight test subjects ranging in age from 22 to 32 years was completed (all normotensive). The arterial pulse wave velocities determined covered a range from 6 m s?1to 12 m s?1, with an average standard deviation of less than 2.5 m s?1for individual results. These areslightly higher,but close to published APWV data. The results showedthat reproducible results can be obtained with the existing PWV acquirement and analysis system.The measurement of arterial pulse wave velocity (APWV) is one of the methods used to measure physiological changes in peripheral vascular disease. Others include pressure pulse contour, arterial elasticity, pulsatile flow, complex vascular impedance and cardiac work.There have been many investigations over the past 30 years or so to relate changes in age and progress of arterial disease, to vessel pathology and distensibility based on the propagation characteristics of the arterial pulse (Malindzak and Meredith 1970, McCormack 1981, Persson et al 2001, Ramsey 1995, Wilkinson 1998). They have only been partially successful from a clinical point of view, mainly due to the difficulty in controlling the effects of patient parameters (autonomic system, patient movement, etc).Early on, the methods of determining APWV involved direct invasive measurement of the pulse pressure at two points along anarterial segment and measuring the time taken for the pulse to travelthe length of the segment. Such investigations had to be limited to animals usually dogs.The sensor technique used in this work involves the piezoelectric effect in polyvinyllidene fluoride (PVDF), which produces an output voltage in response to mechanical pressure on the material.Three methods of APWV determination are used: foot-to-foot APWV; peak-to-peak APWV and cross-correlation APWV. The FFAPWV and CCAPWV methods are less sensitive to pressure wave reflections at bifurcations, etc in the arterial tree, than the PPAPWV method. Mean values and standard deviations were computed for all three methods and compared.‘Foot-to-foot’ APWV (FFAPWV). This is based on the velocity of the ‘foot’, or leading edge, of the pressure pulse wave. The ar rival times of the foot of the pulse wave at two positions along the artery are recorded. If Δt is the difference in arrival times and Δs the distance between the two recording positions (proximal and distal), the FFAPWV is simplyFFAPWV = Δs/Δt.‘Peak-to-peak’ APWV (PPAPWV). This is completely analogous to the FFAPWV except that the points of observation are the two (proximal and distal) peaks of the pulse wave andPPAPWV = Δs/Δt.Apparent pulse wave velocity (AAPWV). The pressure wave may be represented as aFourier series,P(t) = P0 +Pn sin(nωt + θn)Where P0 is the mean fluid pressure, n is the harmonic number, Pnis the amplitude of the nth harmonic and θn is the phase angle of the nth harmonic.The spatial rate of change of the phase for one harmonic based on two simultaneous pressure measurements separated by a distance _s along an artery, is related to the apparent arterial pulse wave velocity (AAPWV) by the following equation,AAPWVn = (Δs)n(f )(360o)/(θx1? θx2)Where AAPWV n is the apparent pulse wave velocity for the nth harmonic, f is the heart rate,θx1 is the phase angle for the proximal harmonic n and θx2 is the phase angle for the distal harmonic n.Cross-correlation PWV. If the arterial pulse at the proximal measurement position is represented by the pressure time series P(x1, t) and that at the distal position by P(x2, t) andthe cross-correlation coefficient is Φx1,x2(τ ), then Φwill have a maximum value at some time lag.The correlation function can be expressed asΦx1,x2(τ ) = (1/T )P(x1, t)P(x2, t) dt.The value of τ at which maximum correlation occurs represents the transit time (_t) of the pressure wave from position x1 to position x2 along the arterial segment. From the separation distance and transit time data the correlation arterial pulse wave velocity isCCAPWV = (x2 ? x1)/ Δt.In this work normal, young test subjects were used, and it has the primary objectives of optimizing the measurement procedures and establishing the statistical spread and mean values of the observed PWVs for a specific peripheral arterial segment. Based on this, it is planned to use the system in clinical trials involving patients with peripheral arterial disease (due to diabetes, hypertension, etc), pre-, during and post treatment (pharmaceutical or surgical).Analogue and digital circuitryAnalogue charge amplifier. Piezoelectric materials convert mechanical stress or strain into proportionate electrical energy, by producing a charge when subjected to mechanical stress. The charge is converted to a voltage by an operational amplifier connected as a current integrator, called a charge amplifier. The signal output of the amplifier is approximately ?30 mV. It is augmented by signal amplification.Analogue signal amplification . This is done by use of an inverting amplifier. Because a dc signal appears at the output of the chargeamplifier, dc offset removal is essential and is implemented in the inverting summingThe next phase of the analogue circuitry is a low pass filter to remove the 50 Hz noise interference.Digital controlled data acquisition and analysis. A dataacquisition board (DAQ) is required when the transducer signals need interfacing with a PC. The board contains 12 bit plus sign and a successive approximation and self-calibrating analogue-to-digital (ADC) converter. The ADC incurs a systematic error known as the quantization error. It is due to limited resolution and with the analogue input limit set at ?5 to +5 V, the quantization error of the A/D converter used here was calculated to be 0.122 mV.The data acquisition and analysis was done using Lab View—a powerful instrumentation and analysis programming language for PCs.Digital data acquisition program. The data acquisition circuit performs all the necessary operations for the data acquisition with Lab View. The functions of the circuit initialize the data acquisition and read the data from the acquisition card. These data are stored for later use in the data analysis part of the program.Lab View programs are called virtual instruments (VIs) because of their appearance and operations are analogous to measuring instruments.A VI that is called within another VI is called a sub-VI and is analogous to a subroutine in text-based languages.The data acquisition, analysis and presentation are comprised of three main procedures:(1) Data acquisition card to interface the hardware to the PC.(2) Data acquisition program to acquire and store data in a spreadsheet file.(3) Data analysis to carry out digital signal processing, calculate PWV and present results.PWV Calculation1. PWV calculation using peak detection. To calculate PWV using peaks, the location of the peaks must first be determined, so that the transit time of the wave between the peaks can be determined. It was found that the best method of peak detection is the derivative of the curve method. If the first derivative of a curve is zero, then an extreme value can exist—eithera peak or a turning point. It is necessary to take the second derivative at this point—if this is also zero, then an extreme value exists. The second VI used to determine the PWV is PWVcalc, using the time separation between the located peaks.2. PWV with pressure wave foot detection. The VI named PWV Foot determines the leading edge (foot) of the pressure wave at the upstream and downstream locations. The VI named PWVcalc is again used to compute the PWV from the time separation between the two leading edges (‘foot-to-foot’ APWV or FFAPWV).3. PWV with cross-correlation. The PWV determination with cross-correlation is done with the VI named CalcPWV. The VI is in two parts: a part for the initialization function and a part for the calculation of the CCAPWV.In all cases PWV values are assembled in an array and the mean value, standard deviation and variance are calculated.Sensor positioningSensor placement is critical to obtaining consistent measurements.A screw mechanism was first used to apply the sensors to the skin. But readings were very variable and so this technique was replaced by that in which the sensors are fixed to the skin by elastic strips. This led to better results.。
单片机 外文翻译 外文文献 英文文献 基于单片机的超声波测距系统的研究与设计
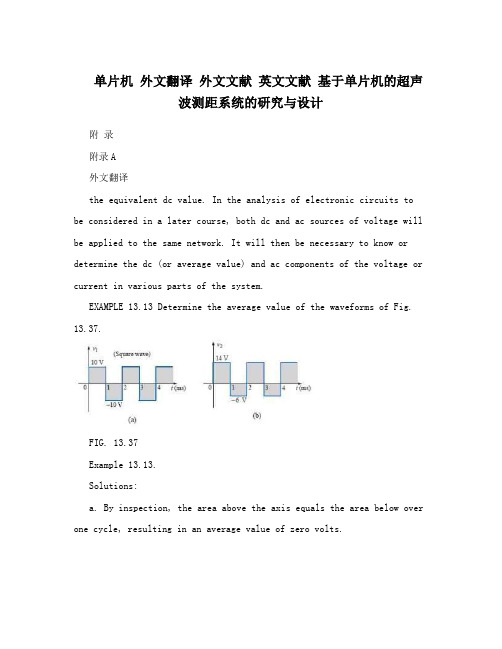
单片机外文翻译外文文献英文文献基于单片机的超声波测距系统的研究与设计附录附录A外文翻译the equivalent dc value. In the analysis of electronic circuits to be considered in a later course, both dc and ac sources of voltage will be applied to the same network. It will then be necessary to know or determine the dc (or average value) and ac components of the voltage or current in various parts of the system.EXAMPLE 13.13 Determine the average value of the waveforms of Fig. 13.37.FIG. 13.37Example 13.13.Solutions:a. By inspection, the area above the axis equals the area below over one cycle, resulting in an average value of zero volts.b. Using Eq.(13.26):as shown in Fig. 13.38.26In reality, the waveform of Fig. 13.37(b) is simply the square wave of Fig. 13.37(a) with a dc shift of 4 V; that is v2 =v1 + 4 VEXAMPLE 13.14 Find the average values of the following waveforms over one full cycle:a. Fig. 13.39.b. Fig. 13.40.27Solutions:We found the areas under the curves in the preceding example by using a simple geometric formula. If we should encounter a sine wave or any other unusual shape, however, we must find the area by some other means. We can obtain a good approximation of the area by attempting to reproduce the original wave shape using a number of small rectangles or other familiar shapes, the area of which we already know through simple geometric formulas. For example,the area of the positive (or negative) pulse of a sine wave is 2Am. Approximating this waveform by two triangles (Fig. 13.43), weobtain(using area1/2 base height for the area of a triangle) a rough idea of the actual area:A closer approximation might be a rectangle with two similar triangles(Fig. 13.44):28which is certainly close to the actual area. If an infinite number of forms were used, an exact answer of 2Am could be obtained. For irregular waveforms, this method can be especially useful if data such as the average value are desired. The procedure of calculus that gives the exact solution 2Am is known as integration. Integration is presented here only to make the method recognizable to the reader; it is not necessary to be proficient in its use to continue with this text. It is a useful mathematical tool, however,and should be learned. Finding the area under the positive pulse of a sine wave using integration, we havewhere ? is the sign of integration, 0 and p are the limits of integration, Am sin a is thefunction to be integrated, and da indicates that we are integrating with respect to a.Integrating, we obtainSince we know the area under the positive (or negative) pulse, we can easily determine the average value of the positive (or negative) region of a sine wave pulse by applying Eq. (13.26):For the waveform of Fig. 13.45,29EXAMPLE 13.15 Determine the average value of the sinusoidal waveform of Fig. 13.46.Solution: By inspection it is fairly obvious thatthe average value of a pure sinusoidal waveform over one full cycle is zero.EXAMPLE 13.16 Determine the average value of the waveform of Fig. 13.47.Solution: The peak-to-peak value of the sinusoidal function is16 mV +2 mV =18 mV. The peak amplitude of the sinusoidal waveform is, therefore, 18 mV/2 =9 mV. Counting down 9 mV from 2 mV(or 9 mV up from -16 mV) results in an average or dc level of -7 mV,as noted by the dashed line of Fig. 13.47.EXAMPLE 13.17 Determine the average value of the waveform of Fig. 13.48.Solution:30EXAMPLE 13.18 For the waveform of Fig. 13.49, determine whether the averagevalue is positive or negative, and determine its approximate value.Solution: From the appearance of the waveform, the average value is positive and in the vicinity of 2 mV. Occasionally, judgments of this type will have to be made. InstrumentationThe dc level or average value of any waveform can be found using a digital multimeter (DMM) or an oscilloscope. For purely dccircuits,simply set the DMM on dc, and readthe voltage or current levels.Oscilloscopes are limited to voltage levels using the sequence of steps listed below:1. First choose GND from the DC-GND-AC option list associated with each vertical channel. The GND option blocks any signal to which the oscilloscope probe may be connected from entering the oscilloscope and responds with just a horizontal line. Set the resulting line in the middle of the vertical axis on the horizontal axis, as shown in Fig. 13.50(a).2. Apply the oscilloscope probe to the voltage to be measured (ifnot already connected), and switch to the DC option. If a dc voltage is present, the horizontal line will shift up or down, as demonstrated in Fig. 13.50(b). Multiplying the shift by the vertical sensitivity will result in the dc voltage. An upward shift is a positive voltage (higher31potential at the red or positive lead of the oscilloscope), while a downward shift is a negative voltage (lower potential at the red or positive lead of the oscilloscope). In general,1. Using the GND option, reset the horizontal line to the middle of the screen.2. Switch to AC (all dc components of the signal to whichthe probe is connected will be blocked from entering the oscilloscope—only the alternating, or changing,components will be displayed).Note the location of some definitive point on the waveform, such as the bottom of the half-wave rectified waveform of Fig. 13.51(a); that is, note its position on the vertical scale. For the future, whenever youuse the AC option, keep in mind that the computer will distribute the waveform above and below the horizontal axis such that the average value is zero; that is, the area above the axis will equal the area below. 3. Then switch to DC (to permit both the dc and the ac components of the waveform to enter the oscilloscope), and note the shift in the chosen level of part 2, as shown in Fig. 13.51(b). Equation(13.29) can then be used to determine the dc or average value of the waveform. For the waveform of Fig. 13.51(b), the average value is aboutThe procedure outlined above can be applied to any alternating waveform such as the one in Fig. 13.49. In some cases the average valuemay require moving the starting position of the waveform under the AC option to a different region of the screen or choosing a higher voltage scale. DMMs can read the average or dc level of any waveform by simply choosing the appropriate scale.3213.7 EFFECTIVE (rms) VALUESThis section will begin to relate dc and ac quantities with respect to the power delivered to a load. It will help us determine the amplitude of a sinusoidal ac current required to deliver the same power as a particular dc current. The question frequently arises, How is it possible for a sinusoidal ac quantity to deliver a net power if, over a full cycle, the net current in any one direction is zero (average value 0)? It would almost appear that the power delivered during the positive portion of the sinusoidal waveform is withdrawn during the negative portion, and since the two are equal in magnitude, the net power delivered is zero. However, understand that irrespective of direction, currentof any magnitude through a resistor will deliver power to that resistor. In other words,during the positive or negative portions of a sinusoidal ac current, power is being delivered at eachinstant of time to the resistor. The power delivered at each instant will, of course, vary with the magnitude of the sinusoidal ac current, but there will be a net flow during either the positive or the negativepulses with a net flow over the full cycle. The net power flow will equal twice that delivered by either the positive or the negative regions of sinusoidal quantity. A fixed relationship between ac and dc voltages and currents can be derived from the experimental setup shown in Fig. 13.52. A resistor in a water bath is connected by switches to a dc and an ac supply. If switch 1 is closed, a dc current I, determined by the resistance R and battery voltage E, will be established through theresistor R. The temperature reached by the water is determined by the dc power dissipated in the form of heat by the resistor.If switch 2 is closed and switch 1 left open, the ac current through the resistor will have a peak value of Im. The temperature reached by the water is now determined by the ac power dissipated in the form of heat by the resistor. The ac input is varied until the temperature is the same as that reached with the dc input. When this is accomplished, the average electrical power delivered to the resistor R by the ac source is the same asthat delivered by the dc source. The power delivered by the ac supply at any instant of time is33The average power delivered by the ac source is just the first term, since the average value of a cosine wave is zero even though the wave may have twice the frequency of the original input current waveform. Equating the average power delivered by the ac generator to that delivered by the dc source,which, in words, states thatthe equivalent dc value of a sinusoidal current or voltage is 1/2 or 0.707 of itsmaximum value.The equivalent dc value is called the effective value of the sinusoidal quantity.In summary,As a simple numerical example, it would require an ac current with a peak value of 2 (10) 14.14 A to deliver the same power to the resistorin Fig. 13.52 as a dc current of 10 A. The effective value of any quantity plotted as a function of time can be found by using the following equation derived from the experiment just described:34which, in words, states that to find the effective value, the function i(t) must first besquared. After i(t) is squared, the area under the curve isfound by integration. It is then divided by T, the length of the cycle or the period of the waveform, to obtain the average or mean value of thesquared waveform. The final step is to take the square root of the meanvalue. This procedure gives us another designation forthe effectivevalue, the root-mean-square (rms) value. In fact, since therms term isthe most commonly used in the educational and industrial communities,it will used throughout this text. EXAMPLE 13.19 Find therms values of the sinusoidal waveform in each part of Fig. 13.53.Solution: For part (a), Irms 0.707(12 10 3 A) 8.484 mA.For part (b), againIrms 8.484 mA. Note that frequency did notchange the effective valuein (b) above compared to (a). For part (c),Vrms 0.707(169.73 V) 120 V, the same as available from a home outlet.EXAMPLE 13.20 The 120-V dc source of Fig. 13.54(a) delivers 3.6 W to the load. Determine the peak value of the applied voltage (Em) and the current (Im) if the acsource [Fig. 13.54(b)] is to deliver the same power to the load.35Solution:EXAMPLE 13.21 Find the effective or rms value of the waveform of Fig.13.55.Solution:36EXAMPLE 13.22 Calculate the rms value of the voltage of Fig. 13.57.Solution:EXAMPLE 13.23 Determine the average and rms values of the square wave of Fig. 13.59.37Solution: By inspection, the average value is zero.The waveforms appearing in these examples are the same as thoseused in the examples on the average value. It might prove interesting tocompare the rms and average values of these waveforms.The rms values of sinusoidal quantities such as voltage or currentwill be represented by E and I. These symbols are the same as thoseused for dc voltages and currents. To avoid confusion, the peak valueof a waveform will always have a subscript m associated with it: Imsin qt. Caution: When finding the rms value ofthe positive pulse of asine wave, note that the squared area is not simply (2Am)24A2m; itmust be found by a completely new integration. This will always bethe case for any waveform that is not rectangular.A uniquesituation arises if a waveform has both a dc and an ac componentthat may be due to a source such as the one in Fig. 13.61. Thecombination appears frequently in the analysis of electronic networkswhere both dc and ac levels are present in the same system.38The question arises, What is the rms value of the voltage vT? Onemight be tempted tosimply assume that it is the sum of the rms valuesof each component of the waveform; that is, VT rms 0.7071(1.5 V) 6 V 1.06 V 6 V 7.06 V. However, the rms value is actuallydetermined bywhich for the above example is39直流值相等。
传感器技术外文文献及中文翻译讲课讲稿

Sensor technologyA sensor is a device which produces a signal in response to its detecting or measuring a property ,such as position , force , torque , pressure , temperature , humidity , speed , acceleration , or vibration .Traditionally ,sensors (such as actuators and switches )have been used to set limits on the performance of machines .Common examples are (a) stops on machine tools to restrict work table movements ,(b) pressure and temperature gages with automatics shut-off features , and (c) governors on engines to prevent excessive speed of operation . Sensor technology has become an important aspect of manufacturing processes and systems .It is essential for proper data acquisition and for the monitoring , communication , and computer control of machines and systems .Because they convert one quantity to another , sensors often are referred to as transducers .Analog sensors produce a signal , such as voltage ,which is proportional to the measured quantity .Digital sensors have numeric or digital outputs that can be transferred to computers directly .Analog-to-coverter(ADC) is available for interfacing analog sensors with computers .Classifications of SensorsSensors that are of interest in manufacturing may be classified generally as follows:Machanical sensors measure such as quantities aspositions ,shape ,velocity ,force ,torque , pressure , vibration , strain , and mass .Electrical sensors measure voltage , current , charge , and conductivity .Magnetic sensors measure magnetic field ,flux , and permeablity .Thermal sensors measure temperature , flux ,conductivity , and special heat .Other types are acoustic , ultrasonic , chemical , optical , radiation , laser ,and fiber-optic .Depending on its application , a sensor may consist of metallic , nonmetallic , organic , or inorganic materials , as well as fluids ,gases ,plasmas , or semiconductors .Using the special characteristics of these materials , sensors covert the quantity or property measured to analog or digital output. The operation of an ordinary mercury thermometer , for example , is based on the difference between the thermal expansion of mercury and that of glass.Similarly , a machine part , a physical obstruction , or barrier in a space can be detected by breaking the beam of light when sensed by a photoelectric cell . A proximity sensor ( which senses and measures the distance between it and an object or a moving member of a machine ) can be based on acoustics , magnetism , capacitance , or optics . Other actuators contact the object and take appropriate action ( usually by electromechanical means ) . Sensors are essential to the conduct of intelligent robots , and are being developed with capabilities that resemble those of humans ( smart sensors , see the following ).This is America, the development of such a surgery Lin Bai an example, through the screen, through a remote control operator to control another manipulator, through the realization of the right abdominal surgery A few years ago our country theexhibition, the United States has been successful in achieving the right to the heart valve surgery and bypass surgery. This robot has in the area, caused a great sensation, but also, AESOP's surgical robot, In fact, it through some equipment to some of the lesions inspections, through a manipulator can be achieved on some parts of the operation Also including remotely operated manipulator, and many doctors are able to participate in the robot under surgery Robot doctor to include doctors with pliers, tweezers or a knife to replace the nurses, while lighting automatically to the doctor's movements linked, the doctor hands off, lighting went off, This is very good, a doctor's assistant.Tactile sensing is the continuous of variable contact forces , commonly by an array of sensors . Such a system is capable of performing within an arbitrarythree-dimensional space .has gradually shifted from manufacturing tonon-manufacturing and service industries, we are talking about the car manufacturer belonging to the manufacturing industry, However, the services sector including cleaning, refueling, rescue, rescue, relief, etc. These belong to the non-manufacturing industries and service industries, so here is compared with the industrial robot, it is a very important difference. It is primarily a mobile platform, it can move to sports, there are some arms operate, also installed some as a force sensor and visual sensors, ultrasonic ranging sensors, etc. It’s surrounding environment for the conduct of identification, to determine its campaign to complete some work, this is service robot’s one of the basic characteristicsIn visual sensing (machine vision , computer vision ) , cameral optically sense the presence and shape of the object . A microprocessor then processes the image ( usually in less than one second ) , the image is measured , and the measurements are digitized ( image recognition ) .Machine vision is suitable particularly for inaccessible parts , in hostile manufacturing environments , for measuring a large number of small features , and in situations where physics contact with the part may cause damage .Small sensors have the capability to perform a logic function , to conducttwo-way communication , and to make a decisions and take appropriate actions . The necessary input and the knowledge required to make a decision can be built into a smart sensor . For example , a computer chip with sensors can be programmed to turn a machine tool off when a cutting tool fails . Likewise , a smart sensor can stop a mobile robot or a robot arm from accidentally coming in contact with an object or people by using quantities such as distance , heat , and noise .Sensor fusion . Sensor fusion basically involves the integration of multiple sensors in such a manner where the individual data from each of the sensors ( such as force , vibration , temperature , and dimensions ) are combined to provide a higher level of information and reliability . A common application of sensor fusion occurs when someone drinks a cup of hot coffee . Although we take such a quotidian event for granted ,it readily can be seen that this process involves data input from the person's eyes , lips , tongue , and hands .Through our basic senses of sight , hearing , smell , taste , and touch , there is real-time monitoring of relative movements , positions , and temperatures . Thus if the coffee is too hot , the hand movement of the cup toward the lip is controlled and adjusted accordingly .The earliest applications of sensor fusion were in robot movement control , missile flight tracking , and similar military applications . Primarily because these activities involve movements that mimic human behavior . Another example of sensor fusion is a machine operation in which a set of different but integrated sensors monitors (a) the dimensions and surface finish of workpiece , (b) tool forces , vibrations ,and wear ,(c) the temperature in various regions of the tool-workpiece system , and (d) the spindle power .An important aspect in sensor fusion is sensor validation : the failure of one particular sensor is detected so that the control system maintains high reliability . For this application ,the receiving of redundant data from different sensors is essential . It can be seen that the receiving , integrating of all data from various sensors can be a complex problem .With advances in sensor size , quality , and technology and continued developments in computer-control systems , artificial neural networks , sensor fusion has become practical and available at low cost .Movement is relatively independent of the number of components, the equivalent of our body, waist is a rotary degree of freedom We have to be able to hold his arm, Arm can be bent, then this three degrees of freedom, Meanwhile there is a wrist posture adjustment to the use of the three autonomy, the general robot has six degrees of freedom. We will be able to space the three locations, three postures, the robot fully achieved, and of course we have less than six degrees of freedomFiber-optic sensors are being developed for gas-turbine engines . These sensors will be installed in critical locations and will monitor the conditions inside the engine , such as temperature , pressure , and flow of gas . Continuous monitoring of the signals from thes sensors will help detect possible engine problems and also provide the necessary data for improving the efficiency of the engines .传感器技术传感器一种通过检测某一参数而产生信号的装置。
英文翻译及文献_单片机-传感器_压力检测
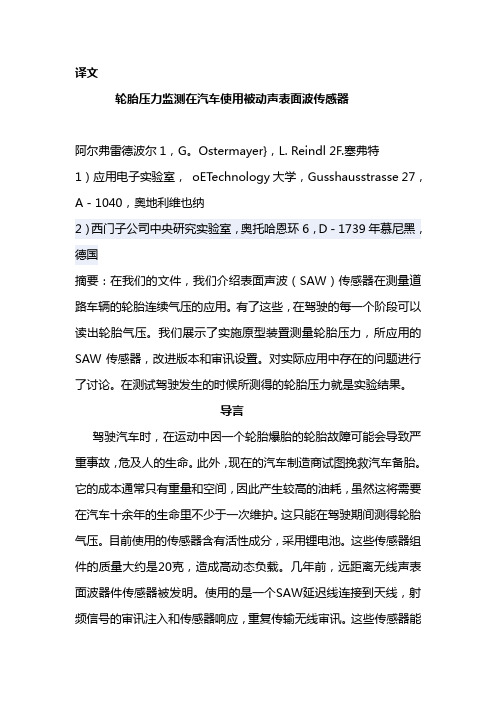
译文轮胎压力监测在汽车使用被动声表面波传感器阿尔弗雷德波尔1,G。
Ostermayer},L. Reindl 2F.塞弗特1)应用电子实验室,oETechnology大学,Gusshausstrasse 27,A - 1040,奥地利维也纳2)西门子公司中央研究实验室,奥托哈恩环6,D - 1739年慕尼黑,德国摘要:在我们的文件,我们介绍表面声波(SAW)传感器在测量道路车辆的轮胎连续气压的应用。
有了这些,在驾驶的每一个阶段可以读出轮胎气压。
我们展示了实施原型装置测量轮胎压力,所应用的SAW传感器,改进版本和审讯设置。
对实际应用中存在的问题进行了讨论。
在测试驾驶发生的时候所测得的轮胎压力就是实验结果。
导言驾驶汽车时,在运动中因一个轮胎爆胎的轮胎故障可能会导致严重事故,危及人的生命。
此外,现在的汽车制造商试图挽救汽车备胎。
它的成本通常只有重量和空间,因此产生较高的油耗,虽然这将需要在汽车十余年的生命里不少于一次维护。
这只能在驾驶期间测得轮胎气压。
目前使用的传感器含有活性成分,采用锂电池。
这些传感器组件的质量大约是20克,造成高动态负载。
几年前,远距离无线声表面波器件传感器被发明。
使用的是一个SAW延迟线连接到天线,射频信号的审讯注入和传感器响应,重复传输无线审讯。
这些传感器能测量温度,机械负荷,力和位移等的好处是,声表面波传感器是完全无源器件,并包含没有电力供应,也没有半导体。
即使在恶劣的环境下,它们的温度高达几百度,其寿命远远长于的电池供电,车辆强烈的电磁污染是由点火系统传感器运作产生的危害风险。
首先,我们讨论压力测量采用声表面波传感器与无线目前某些类型的传感器组件和审查我们讨论实施到本实验简要总结的内容。
声表面波压力传感器电气被动声表面波压力传感器始终是一个端口延迟线多个反射或各自独立的谐振器。
在延迟,审讯传送突发信号,读写器发送一个脉冲信号,每一个反射安排在基板的表面延迟差两个或两个以上的反应信号测量一些物理值,参数转化为改变传感器的表面长度或表面声波的速度,分别延迟里的反应一比长度李声表面波传播的基板表面和繁殖。
最新传感器技术外文文献及中文翻译资料

Sensor technologyA sensor is a device which produces a signal in response to its detecting or measuring a property ,such as position , force , torque , pressure , temperature , humidity , speed , acceleration , or vibration .Traditionally ,sensors (such as actuators and switches )have been used to set limits on the performance of machines .Common examples are (a) stops on machine tools to restrict work table movements ,(b) pressure and temperature gages with automatics shut-off features , and (c) governors on engines to prevent excessive speed of operation . Sensor technology has become an important aspect of manufacturing processes and systems .It is essential for proper data acquisition and for the monitoring , communication , and computer control of machines and systems .Because they convert one quantity to another , sensors often are referred to as transducers .Analog sensors produce a signal , such as voltage ,which is proportional to the measured quantity .Digital sensors have numeric or digital outputs that can be transferred to computers directly .Analog-to-coverter(ADC) is available for interfacing analog sensors with computers .Classifications of SensorsSensors that are of interest in manufacturing may be classified generally as follows:Machanical sensors measure such as quantities aspositions ,shape ,velocity ,force ,torque , pressure , vibration , strain , and mass .Electrical sensors measure voltage , current , charge , and conductivity .Magnetic sensors measure magnetic field ,flux , and permeablity .Thermal sensors measure temperature , flux ,conductivity , and special heat .Other types are acoustic , ultrasonic , chemical , optical , radiation , laser ,and fiber-optic .Depending on its application , a sensor may consist of metallic , nonmetallic , organic , or inorganic materials , as well as fluids ,gases ,plasmas , or semiconductors .Using the special characteristics of these materials , sensors covert the quantity or property measured to analog or digital output. The operation of an ordinary mercury thermometer , for example , is based on the difference between the thermal expansion of mercury and that of glass.Similarly , a machine part , a physical obstruction , or barrier in a space can be detected by breaking the beam of light when sensed by a photoelectric cell . A proximity sensor ( which senses and measures the distance between it and an object or a moving member of a machine ) can be based on acoustics , magnetism , capacitance , or optics . Other actuators contact the object and take appropriate action ( usually by electromechanical means ) . Sensors are essential to the conduct of intelligent robots , and are being developed with capabilities that resemble those of humans ( smart sensors , see the following ).This is America, the development of such a surgery Lin Bai an example, through the screen, through a remote control operator to control another manipulator, through the realization of the right abdominal surgery A few years ago our country theexhibition, the United States has been successful in achieving the right to the heart valve surgery and bypass surgery. This robot has in the area, caused a great sensation, but also, AESOP's surgical robot, In fact, it through some equipment to some of the lesions inspections, through a manipulator can be achieved on some parts of the operation Also including remotely operated manipulator, and many doctors are able to participate in the robot under surgery Robot doctor to include doctors with pliers, tweezers or a knife to replace the nurses, while lighting automatically to the doctor's movements linked, the doctor hands off, lighting went off, This is very good, a doctor's assistant.Tactile sensing is the continuous of variable contact forces , commonly by an array of sensors . Such a system is capable of performing within an arbitrarythree-dimensional space .has gradually shifted from manufacturing tonon-manufacturing and service industries, we are talking about the car manufacturer belonging to the manufacturing industry, However, the services sector including cleaning, refueling, rescue, rescue, relief, etc. These belong to the non-manufacturing industries and service industries, so here is compared with the industrial robot, it is a very important difference. It is primarily a mobile platform, it can move to sports, there are some arms operate, also installed some as a force sensor and visual sensors, ultrasonic ranging sensors, etc. It’s surrounding environment for the conduct of identification, to determine its campaign to complete some work, this is service robot’s one of the basic characteristicsIn visual sensing (machine vision , computer vision ) , cameral optically sense the presence and shape of the object . A microprocessor then processes the image ( usually in less than one second ) , the image is measured , and the measurements are digitized ( image recognition ) .Machine vision is suitable particularly for inaccessible parts , in hostile manufacturing environments , for measuring a large number of small features , and in situations where physics contact with the part may cause damage .Small sensors have the capability to perform a logic function , to conducttwo-way communication , and to make a decisions and take appropriate actions . The necessary input and the knowledge required to make a decision can be built into a smart sensor . For example , a computer chip with sensors can be programmed to turn a machine tool off when a cutting tool fails . Likewise , a smart sensor can stop a mobile robot or a robot arm from accidentally coming in contact with an object or people by using quantities such as distance , heat , and noise .Sensor fusion . Sensor fusion basically involves the integration of multiple sensors in such a manner where the individual data from each of the sensors ( such as force , vibration , temperature , and dimensions ) are combined to provide a higher level of information and reliability . A common application of sensor fusion occurs when someone drinks a cup of hot coffee . Although we take such a quotidian event for granted ,it readily can be seen that this process involves data input from the person's eyes , lips , tongue , and hands .Through our basic senses of sight , hearing , smell , taste , and touch , there is real-time monitoring of relative movements , positions , and temperatures . Thus if the coffee is too hot , the hand movement of the cup toward the lip is controlled and adjusted accordingly .The earliest applications of sensor fusion were in robot movement control , missile flight tracking , and similar military applications . Primarily because these activities involve movements that mimic human behavior . Another example of sensor fusion is a machine operation in which a set of different but integrated sensors monitors (a) the dimensions and surface finish of workpiece , (b) tool forces , vibrations ,and wear ,(c) the temperature in various regions of the tool-workpiece system , and (d) the spindle power .An important aspect in sensor fusion is sensor validation : the failure of one particular sensor is detected so that the control system maintains high reliability . For this application ,the receiving of redundant data from different sensors is essential . It can be seen that the receiving , integrating of all data from various sensors can be a complex problem .With advances in sensor size , quality , and technology and continued developments in computer-control systems , artificial neural networks , sensor fusion has become practical and available at low cost .Movement is relatively independent of the number of components, the equivalent of our body, waist is a rotary degree of freedom We have to be able to hold his arm, Arm can be bent, then this three degrees of freedom, Meanwhile there is a wrist posture adjustment to the use of the three autonomy, the general robot has six degrees of freedom. We will be able to space the three locations, three postures, the robot fully achieved, and of course we have less than six degrees of freedomFiber-optic sensors are being developed for gas-turbine engines . These sensors will be installed in critical locations and will monitor the conditions inside the engine , such as temperature , pressure , and flow of gas . Continuous monitoring of the signals from thes sensors will help detect possible engine problems and also provide the necessary data for improving the efficiency of the engines .传感器技术传感器一种通过检测某一参数而产生信号的装置。
传感器技术论文中英文对照资料外文翻译文献
传感器技术论文中英文对照资料外文翻译文献中英文对照资料外文翻译文献附件1:外文资料翻译译文传感器新技术的发展传感器是一种能将物理量、化学量、生物量等转换成电信号的器件。
输出信号有不同形式,如电压、电流、频率、脉冲等,能满足信息传输、处理、记录、显示、控制要求,是自动检测系统和自动控制系统中不可缺少的元件。
如果把计算机比作大脑,那么传感器则相当于五官,传感器能正确感受被测量并转换成相应输出量,对系统的质量起决定性作用。
自动化程度越高,系统对传感器要求越高。
在今天的信息时代里,信息产业包括信息采集、传输、处理三部分,即传感技术、通信技术、计算机技术。
现代的计算机技术和通信技术由于超大规模集成电路的飞速发展,而已经充分发达后,不仅对传感器的精度、可靠性、响应速度、获取的信息量要求越来越高,还要求其成本低廉且使用方便。
显然传统传感器因功能、特性、体积、成本等已难以满足而逐渐被淘汰。
世界许多发达国家都在加快对传感器新技术的研究与开发,并且都已取得极大的突破。
如今传感器新技术的发展,主要有以下几个方面:利用物理现象、化学反应、生物效应作为传感器原理,所以研究发现新现象与新效应是传感器技术发展的重要工作,是研究开发新型传感器的基础。
日本夏普公司利用超导技术研制成功高温超导磁性传感器,是传感器技术的重大突破,其灵敏度高,仅次于超导量子干涉器件。
它的制造工艺远比超导量子干涉器件简单。
可用于磁成像技术,有广泛推广价值。
利用抗体和抗原在电极表面上相遇复合时,会引起电极电位的变化,利用这一现象可制出免疫传感器。
用这种抗体制成的免疫传感器可对某生物体内是否有这种抗原作检查。
如用肝炎病毒抗体可检查某人是否患有肝炎,起到快速、准确作用。
美国加州大学巳研制出这类传感器。
传感器材料是传感器技术的重要基础,由于材料科学进步,人们可制造出各种新型传感器。
例如用高分子聚合物薄膜制成温度传感器;光导纤维能制成压力、流量、温度、位移等多种传感器;用陶瓷制成压力传感器。
单片机-外文翻译-外文文献-英文文献-基于单片机的超声波测距系统的研究与设计

附录附录A外文翻译the equivalent dc value。
In the analysis of electronic circuits to be considered in a later course, both dc and ac sources of voltage will be applied to the same network。
It will then be necessary to know or determine the dc (or average value)and ac components of the voltage or current in various parts of the system.EXAMPLE 13.13 Determine the average value of the waveforms of Fig。
13.37。
FIG。
13。
37Example 13。
13。
Solutions:a. By inspection, the area above the axis equals the area below over one cycle,resulting in an average value of zero volts.b。
Using Eq。
(13.26):as shown in Fig。
13。
38.In reality, the waveform of Fig. 13。
37(b)is simply the square wave of Fig. 13。
37(a) with a dc shift of 4 V; that is v2 =v1 + 4 VEXAMPLE 13.14 Find the average values of the following waveforms over one full cycle:a.Fig. 13。
at89c52单片机中英文资料对照外文翻译文献综述
D.htmlat89c52单片机中英文资料对照外文翻译文献综述at89c52单片机简介中英文资料对照外文翻译文献综述AT89C52 Single-chip microprocessor introductionSelection of Single-chip microprocessor1. Development of Single-chip microprocessorThe main component part of Single-chip microprocessor as a result of by such centralize to be living to obtain on the chip,In immediate future middle processor CPU。
Storage RAM immediately﹑memoy readROM﹑Interrupt system、Timer /'s counter along with I/O's rim electric circuit awaits the main microcomputer section,The lumping is living on the chip。
Although the Single-chip microprocessor r is only a chip,Yet through makes up and the meritorous service be able to on sees,It had haveed the calculating machine system property,calling it for this reason act as Single-chip microprocessor r minisize calculating machine SCMS and abbreviate the Single-chip microprocessor。
外文文献翻译-压电传感器测定动脉脉搏波速度汇编
Piezoelectric sensor determination of arterial pulse wave velocity Arterial pulse wave velocity (APWV) is a measure of the elasticity (or stiffness) of peripheral arterial blood vessels. The pulse referred to here will be the pressure pulse as opposed to the flow pulse measured by ultrasound Doppler.The pressure pulse velocity varies over the range from about 12 m s−1 to15 m s−1 in stiff peripheral arteries, whereas in normal arteries it has a velocity in the range of 7 to 9 m s−1.The aim of this project was the development of a fast and easy to use system for the determination of peripheral arterial pulse wave velocity. The principle of the PWV measurement is based on simultaneous measurement of two pulse waves at two different positions, such as the radial artery at the wrist and the brachial artery just above the elbow. By determining the pulse transit time between these points and the distance measured between the two locations, pulse wave velocity may then be calculated. The pressure pulse detection is done by using two piezoelectric sensors which generate a measurable voltage at the output contacts if they are mechanically deformed. The deformation produced voltage is first amplified and filtered and then digitalized with a data acquisition card. The analysis of the data obtained from the sensors includes a filtering process, the calculation of the PWV with three different methods— foot-to-foot, cross-correlation and peak-to-peak—and the determination of the arterial pulse rate.Extensive measurements with human test subjects were carried out to optimize the techniques of data acquisition and analysis. For example, it was found that the best procedure was to hold the sensors in place using elastic straps alone. The data analysis was upgraded with an additional software module, which deletes, in effect, outriders or invalid measurements. With the optimized system, a series involving eight test subjects ranging in age from 22 to 32 years was completed (all normotensive). The arterial pulse wave velocities determined covered a range from 6 m s−1to 12 m s−1, with an average standard deviation of less than 2.5 m s−1for individual results. These are slightly higher,but close to published APWV data. The results showed that reproducible results can be obtained with the existing PWV acquirement and analysis system.The measurement of arterial pulse wave velocity (APWV) is one of the methods used to measure physiological changes in peripheral vascular disease. Others include pressure pulse contour, arterial elasticity, pulsatile flow, complex vascular impedance and cardiac work.There have been many investigations over the past 30 years or so to relate changes in age and progress of arterial disease, to vessel pathology and distensibility based on the propagation characteristics of the arterial pulse (Malindzak and Meredith 1970, McCormack 1981, Persson et al 2001, Ramsey 1995, Wilkinson 1998). They have only been partially successful from a clinical point of view, mainly due to the difficulty in controlling the effects of patient parameters(autonomic system, patient movement, etc).Early on, the methods of determining APWV involved direct invasive measurement of the pulse pressure at two points along an arterial segment and measuring the time taken for the pulse to travel the length of the segment. Such investigations had to be limited to animals usually dogs.The sensor technique used in this work involves the piezoelectric effect in polyvinyllidene fluoride (PVDF), which produces an output voltage in response to mechanical pressure on the material.Three methods of APWV determination are used: foot-to-foot APWV; peak-to-peak APWV and cross-correlation APWV . The FFAPWV and CCAPWV methods are less sensitive to pressure wave reflections at bifurcations, etc in the arterial tree, than the PPAPWV method. Mean values and standard deviations were computed for all three methods and compared.‘Foot -to-foot’ APWV (FFAPWV). This is based on the velocity of the ‘foot’, or leading edge, of the pressure pulse wave. The arrival times of the foot of the pulse wave at two positions along the artery are recorded. If Δt is the difference in arrival times and Δs the distance between the two recording positions (proximal and distal), the FFAPWV is simplyFFAPWV = Δs/Δt.‘Peak -to-peak’ APWV (PPAPWV). This is completely analogous to theFFAPWV except that the points of observation are the two (proximal and distal) peaks of the pulse wave andPPAPWV = Δs/Δt.Apparent pulse wave velocity (AAPWV). The pressure wave may berepresented as aFourier series,P(t) = P0 +∑=kn 1Pn sin(n ωt + θn)Where P0 is the mean fluid pressure, n is the harmonic number, Pn is theamplitude of the nth harmonic and θn is the phase angle of the nth harmonic.The spatial rate of change of the phase for one harmonic based on twosimultaneous pressure measurements separated by a distance _s along an artery, is related to the apparent arterial pulse wave velocity (AAPWV) by the following equation,AAPWVn = (Δs)n(f )(360o )/(θx1− θx2)Where AAPWV n is the apparent pulse wave velocity for the nth harmonic, f is the heart rate,θx1 is the phase angle for the proximal harmonic n and θx2 is thephase angle for the distal harmonic n.Cross-correlation PWV. If the arterial pulse at the proximal measurement position is represented by the pressure time series P(x1, t) and that at the distal position by P(x2, t) andthe cross-correlation coefficient is Φx1,x2(τ), then Φwill have a maximum value at some time lag.The correlation function can be expressed asΦx1,x2(τ) = (1/T )⎰-2/2/εεP(x1, t)P(x2, t) dt.The value of τat which maximum correlation occurs represents the transit time (_t) of the pressure wave from position x1 to position x2 along the arterial segment. From the separation distance and transit time data the correlation arterial pulse wave velocity isCCAPWV = (x2 −x1)/Δt.In this work normal, young test subjects were used, and it has the primary objectives of optimizing the measurement procedures and establishing the statistical spread and mean values of the observed PWVs for a specific peripheral arterial segment. Based on this, it is planned to use the system in clinical trials involving patients with peripheral arterial disease (due to diabetes, hypertension, etc), pre-, during and post treatment (pharmaceutical or surgical).Analogue and digital circuitryAnalogue charge amplifier. Piezoelectric materials convert mechanical stress or strain into proportionate electrical energy, by producing a charge when subjected to mechanical stress. The charge is converted to a voltage by an operational amplifier connected as a current integrator, called a charge amplifier. The signal output of the amplifier is approximately −30 mV. It is augmented by signal amplificat ion.Analogue signal amplification . This is done by use of an inverting amplifier. Because a dc signal appears at the output of the charge amplifier, dc offset removal is essential and is implemented in the inverting summingThe next phase of the analogue circuitry is a low pass filter to remove the 50 Hz noise interference.Digital controlled data acquisition and analysis. A data acquisition board (DAQ) is required when the transducer signals need interfacing with a PC. The board contains 12 bit plus sign and a successive approximation and self-calibrating analogue-to-digital (ADC) converter. The ADC incurs a systematic error known as the quantization error. It is due to limited resolution and with the analogue input limit set at −5 to +5 V, the quantizat ion error of the A/D converter used here was calculated to be 0.122 mV.The data acquisition and analysis was done using Lab View—a powerful instrumentation and analysis programming language for PCs.Digital data acquisition program. The data acquisition circuit performs all the necessary operations for the data acquisition with Lab View. The functions of the circuit initialize the data acquisition and read the data from the acquisition card. These data are stored for later use in the data analysis part of the program.Lab View programs are called virtual instruments (VIs) because of their appearance and operations are analogous to measuring instruments. A VI that is called within another VI is called a sub-VI and is analogous to a subroutine in text-based languages.The data acquisition, analysis and presentation are comprised of three main procedures:(1) Data acquisition card to interface the hardware to the PC.(2) Data acquisition program to acquire and store data in a spreadsheet file.(3) Data analysis to carry out digital signal processing, calculate PWV and present results.PWV Calculation1. PWV calculation using peak detection. To calculate PWV using peaks, the location of the peaks must first be determined, so that the transit time of the wave between the peaks can be determined. It was found that the best method of peak detection is the derivative of the curve method. If the first derivative of a curve is zero, then an extreme value can exist—eithera peak or a turning point. It is necessary to take the second derivative at this point—if this is also zero, then an extreme value exists. The second VI used to determine the PWV is PWVcalc, using the time separation between the located peaks.2. PWV with pressure wave foot detection. The VI named PWV Foot determines the leading edge (foot) of the pressure wave at the upstream and downstream locations. The VI named PWVcalc is again used to compute the PWV from the time separation between the two leading edges (‘foot-to-foot’ APWV or FFAPWV).3. PWV with cross-correlation. The PWV determination with cross-correlation is done with the VI named CalcPWV. The VI is in two parts: a part for the initialization function and a part for the calculation of the CCAPWV.In all cases PWV values are assembled in an array and the mean value, standard deviation and variance are calculated.Sensor positioningSensor placement is critical to obtaining consistent measurements. A screw mechanism was first used to apply the sensors to the skin. But readings were very variable and so this technique was replaced by that in which the sensors are fixed to the skin by elastic strips. This led to better results.Arm position is another critical feature of measurement. Two positions, normal and dependent, were analyzed in detail, using one test subject. In the normal position, the subject sits with the arm resting on a table. All test subject measurements were made in this position. In the dependent position, the subject sits with the arm hanging straight down.The PWV values were smaller in this position and the variability was much greater, so this technique was discarded.A correction module, ‘Delete Incorrect’, was used to delete PWV values resulting from aberrant signals, caused commonly by arm movement during the measurement. These unrealistic values were deleted before the PWV values were passed to the analysis VI.压电传感器测定动脉脉搏波速度动脉脉搏波速度(APWV)是一个测量的弹性(或刚度)的外周动脉血管。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参考文献Monitoring the Tire Pressure at Cars Using Passive SAW Sensors Alfred Pohl 1, G. Ostermayer }, L. Reindl 2, F. Seifert1) Applied Electronics Laboratory, University oETechnology, Gusshausstrasse 27, A-1040 Vienna, Austria2) Siemens Central Research Lab., Otto Hahn Ring 6, D-$1739 Munich, Germany Abstract:In our paper we present the application of surface acoustic wave (SAW) sensors to the continuous manitaring of the tire pressure in road ve hicles. With these, the tire pressure can be read out in every phase of driving. We show the implemented prototype setup for measurement of the tire pressu re, the applied SAW sensors, improved versions and the interrogation setup. The problems in practical application are discussed. Experimental result s measuring the tire pressure during test rides are presented.INTRODUCTIONOperating a road vehicle, a malfunction of the tires in motion due to a tire puncture can cause serious accidents and endanger human life. Furthermore, nowadays manufacturers of cars try to save the spare wheel in vehicles. Usually it only costs weight and space, therefore it yields a higher fuel consumption,although it will be required less than one time in more than ten years of a car's life. This only can be done, if the air pressure in the tires can be measured even during driving. Currently used sensors contain active components, powered by a Lithium battery. The mass of these sensor assemblies is about 20 grams causing high dynamic load. A few years ago,wirelessIy interrogable SAW devices far sensor applications were invented. [1,2, 3]. Using an one port SAW delay line connected to an antenna only, an RF interrogation signal is fed into and the sensor response,carrying thesensor information is retransmitted wirelessly to the interrogator. These sensors are capable for measurement of temperature, mechanical load, force and displacement, etc. The advantage is, that SAW sensors are totally passive devices and contain neither power supply nor semiconductors. They withstand temperatures up to several hundreds of degree centigrades, their lifetime is much longer than that of battery powered systems.Further,in vehicles strong electromagnetic pollution is generated by ignition systems etc.SAW sensors operate without risk of damage even in rough environments. First we discuss pressure measurement employing SAW sensors with wireless interrogation.We present some types of sensor assemblies and the interrogation system.Next we discuss the implementation into thecar and thenwe present experimentally results.Finally a brief summary concludes the content of thepaper.SAW PRESSURE SENSORSThe electrical behaviour of a passive SAW pressure sensor always is that of a one port delay line with multiple reflectors or a resonator,respectively. In the delay linecase,the interrogator transmits a burst signal,the sensor responds with a chain of bursts,one for every reflector arranged at the substrate's surface.The differential delay between two or more response signals is evaluated.To measure some physical value,the parameter has to be converted into a change of sensor's surface length or surface acoustic wave's velocity,respectively.The delay ri of the response of areflector i is the ratio of SAW propagation length Li on the substrate's surface and propagation velocityv,.Affecting the sensor with a measurand causes a scaling of the sensor's response to be observed as individual delay shifts Ari of the response signals si originating frotmhe reflectors i.Mechanical measurands can be collected by loading the sensor mechanically.Apart from stretching and compressing,utilized for wireless measurement of torque,etc.the SAW sensor's substrate can be bent.Pressure can affect the sensor by bending a membrane,shifting the edge of a sensor fixed on theother side.Here the sensor is loaded to be bent due to a shift of the center of a membrane loaded by the pressure.On the other hand the sensor can directly be fitted to the membrane or a piezoelectric membrane representing the SAW substrate can be used.Figure 1 shows these methods.Fig.1:a)Membrane converting pressureto shift bendingthe SAW sensor(SAWS)b)SAW sensor fitted to the membraneThe next step is to cover the sensor membrane by a cap consisting of a spacer frame and a quartz cover plate.This yieldsanintegratedpressure chamber SAW sensor[4](fig.2).Fig.2:Integrated pressure chamber SAW sensorThecover protects theSAW generating metallic structure from oxidation and the surface from dust.The cavity can befiIledwith a gas at reference pressure.If the cavityis evacuated,absolute pressure values can bemeasured.Measurement is made byinterrogationusing simple RF burst signals.The response impulses are evaluated in magnitude and phase.Bending the membrane due to pressure loadyields a phase shift of for instance 100 degree for lo4 Pascal.With this theairpressure in car tires can be measuredwith a resolutioonf approx.IO'Pascal(0.01 Bar).To reduce the amount of data to process,for the implementation in cars the resolution was reduced to 50 mBar.IMPLEMENTATIONThe first prototype used for the experimental measuremenwtsas a pressure chamber with a membrane made of brass.The sensor unit was fitted to a hub cap andwas connected to the valve by a pressure assembly(fig.3).Fig.3:First prototype of pressure chamber formeasurement of tire pressureFor serial manufacture the sensor system~have tobe much smaller and able to be integrated in the tire.Therefore we implemented the integrated pressure chamber(fig.2)into the tire.The sensor was fixed to the rim,the metallic valve shaft was used as the sensor's antenna(fig.4).Fig.4:Integrated pressure chamber fixed to the rim,valve used as antennaFoirmproved implementation a sensor assembly only fitted to the valve was developed(fig.5).The total mass of the unit is only a few grams,the dynamic load is small even driving at high speed.Fig.5:Pressure sensor forfitting into the valve shaftThcear based interrogation system uses space diversity to distinguish the sensors in the tires.Therefore below every car wing an antenna has to be employed.We used coaxial cables,hut it is difficult and expensive to use them in cars.Our investigationsshow the applicability of twisted pair wires too.Fig.6:Interrogation antenna on carFor measurement we developed a small sized interrogation system transmitting bursts and looking for the phase shift between the response signal bursts.The system was controlled by a one chip microcontroller and abisle to display the measurement result on aLCD display.In fig.7 a photograph of the system is shown.Fig.7:System for wireless interrogation of passiveSAW sensors(50 x 100 x 160 mm’)MEASUREMENTRESULTSTo test our sensors and our system we made a lot of test rides within the area and around the city of Vienna.The interrogation system was coupled to alaptop computer.The pressure values were measured and recorded to a file. Thefigures 8 and 9 show characteristic behaviour of tire pressure for different driving conditions. Due to the shocks from a rugged lane,in the left part of fig.8 the absolute pressure value swings around the mean value by the least significant bit,0.05 Bar.The narrow higher peaks of tire pressure belong to braking maneuvers(the sensor was mounted toa front wheel).The longer increase of tire pressure and the following period of decay is due to riding over a curbstone.The system showed high reliability even when driving in a heavy snow storm. tire pressure[Bar]Fig.8:Tire pressure for different driving conditionsIn figure 9 the pressure in the right front wheel can be observed zoomed in time while passing a two track grade crossing with an adjacent water channel across the lane.Due to the dilapidated arrangement of the grade crossing,hard shocks are transmitted to thecar body causing hard pressure shocks in the tires.Fig.9:Tire pressure crossing a grade crossing withtwo tracks and a water channel across the laneDISCUSSIONSAW sensors with wirelessly interrogation are free of maintenance and withstand high thermal and mechanical load.The measurement performance is comparable to that of competitors.The effort in car based system is higher for SAW sensors,since theactive sensor units transmit preconditioned digital information containing pressure valueand sensor The major advantage of SAW devices in identification. applications,where high revolutions per time occur, is their low mass.The centrifugal force is m.v*/r,with the mass m,the velocity v and the radius r.To minimize dynamic mechanical load,the mass of a system applied to rotating parts should be as low as possible.Whereas conventional sensor units for tire pressure measurements have a mass of approx.20 grams,the integrated pressure sensor itself(fig.5) has a mass of less than one gram.The complete SAW sensor unit's mass in worst case is only a few grams.Conventional systems are powered by a Lithium battery.In case of a worntire,since the battery cannot be checked,the sensor should be replaced too,yielding problems of waste disposal.For a system integrated in the car electronic,it is needless to display the pressure of each tire continuously.Here,only a malfunction should trigger an alert.The system's display can be canceled,reducing system's cost.CONCLUSIONTheadvantagews of passive SAW sensors make thwemell suited for vehicular applications.Especially for measurement of tire pressure low mass and the fact thatthey are free of maintenance makethem to be superior over the competitors.The SAW sensors for pressure measurement,the implementation in tires and the system for interrogation were discussed.Experimental results out of a lot of measurement rides were presented.REFERENCES[l]Reindl,F.Muller,C.Ruppel,WE.Bulst and F.Seifert,Passive surface wave sensors which can be.wirelessly interrogated,International Patent Appl WO 93/13495(1992).[2]Seifert F.,Bulst W.E.,Ruppel C.,Mechanical sensors based on surface acoustic waves,Sensors andActuators,A44(1994)231-239[3]G.Scholl,T.Ostertag,L.Reindl,H.Scherr,0.Sczesny,U.Wolff,Wireless SAW Sensors for Remote Measurement of Physical Parameters,Proc.IEEE Intern.Workshopon Commercial Radio Sensors and Communication Techniques,1997,pp.51-58.[4]H.Scherr,G.Scholl,F.Seifert,R.Weigel,Quartz Pressure Sensor Based on SAW Reflective Delay Line,Proc.IEEE Ultrasonics Symposium 1996,pp.347-350.译文轮胎压力监测在汽车使用被动声表面波传感器阿尔弗雷多波尔,塞弗特1 )应用电子实验室,大学27日, - 1040维也纳,奥地利2 )西门子公司中央研究实验室。