高速公路平面坐标计算公式-定稿
公路测量坐标计算公式
公路测量坐标计算公式引言公路测量是一项基础工作,用于确定公路建设或维护所需的各个节点坐标。
在公路工程领域,测量坐标计算公式是至关重要的工具,用于测算和确定公路各个位置的坐标信息。
本文将介绍公路测量坐标计算公式的原理和应用。
坐标系统在公路测量中,使用的坐标系统通常是平面直角坐标系。
这个坐标系统由X轴和Y轴组成,其中X轴表示东西方向,Y轴表示南北方向。
公路测量中,测量标准一般会规定一个起始点作为基准点,所有的测量点都以该基准点为原点建立坐标。
公路测量坐标计算公式坐标计算原理坐标计算公式的原理是通过已知的测量数据和几何关系,推导出待求点的坐标。
常用的坐标计算方法包括三角测量法、坐标转换法和横断面测量法等。
三角测量法三角测量法是基于三角形几何学原理的坐标计算方法。
它通过测量已知点与待求点之间的夹角和距离,利用三角函数关系计算出待求点的坐标。
三角测量法适用于平面内的测量,并具有较高的精度。
坐标转换法坐标转换法是将已知点的坐标转换到待求点坐标的计算方法。
它利用已知点和待求点在同一坐标系统中的相对位置关系,通过坐标转换公式计算待求点的坐标。
坐标转换法适用于已知点坐标较为准确的情况。
横断面测量法横断面测量法适用于公路等线性工程的坐标计算。
它通过测量已知点的高程和于待求点的高程差,利用高程差和水平距离之间的关系计算待求点的坐标。
横断面测量法适用于公路中断面的测量和计算。
应用示例公路测量坐标计算公式在实际工程中具有广泛的应用。
下面以一个简单的示例来说明其应用过程:假设有一段公路,已知起点的坐标为(0,0),终点的坐标为(1000,0)。
现在需要测算该公路上距离起点100米处的坐标。
根据三角测量法,可以通过测量起点和待求点之间的夹角和距离来计算待求点的坐标。
假设测量得到的夹角为45度,距离为100米。
根据三角函数的性质,可以计算出待求点的坐标为(100,100)。
总结公路测量坐标计算公式是公路工程中不可或缺的工具。
通过三角测量法、坐标转换法和横断面测量法等方法,可以准确计算公路上各个位置的坐标信息。
高速公路线路(缓和曲线、竖曲线、圆曲线、匝道)坐标计算公式

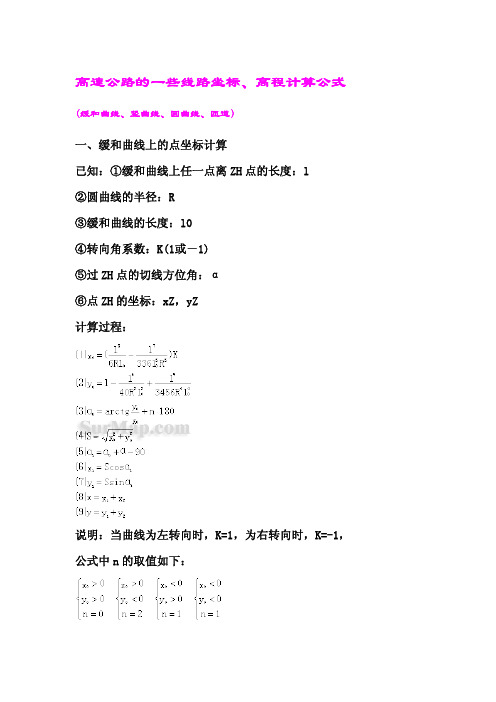
高速公路线路(缓和曲线、竖曲线、圆曲线、匝道)坐标计算公式_★★高速公路的一些线路坐标、高程计算公式(缓和曲线、竖曲线、圆曲线、匝道)一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
高速公路测量计算公式

高速公路的一些线路计算一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH 点的长度:l②圆曲线的半径:R③缓和曲线的长度:l 0④转向角系数:K(1或-1)⑤过ZH 点的切线方位角:α⑥点ZH 的坐标:x Z ,y Z计算过程:y y ⑼y x x ⑻x αSsin y ⑺αScos x ⑹90ααα⑸y x ⑷S 180n x y arctg α⑶l 3456R l l 40R l l y ⑵)KR336l l6Rl l (x ⑴Z1Z111110122000449202503307030+=+===-+=+=⋅+=+-=-=说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n 的取值如下:⎪⎩⎪⎨⎧=<<⎪⎩⎪⎨⎧=><⎪⎩⎪⎨⎧=<>⎪⎩⎪⎨⎧=>>1n 0y 0x 1n 0y 0x 2n 0y 0x 0n 0y 0x 00000000 当计算第二缓和曲线上的点坐标时,则:l 为到点HZ 的长度α为过点HZ 的切线方位角再加上180°K 值与计算第一缓和曲线时相反x Z ,y Z 为点HZ 的坐标切线角计算公式:2Rl lβ02=二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH 点的长度:l②圆曲线的半径:R③缓和曲线的长度:l 0④转向角系数:K(1或-1)⑤过ZH 点的切线方位角:α⑥点ZH 的坐标:x Z ,y Z计算过程:y y ⑿y x x ⑾x αSsin y ⑽αScos x ⑼90ααα⑻y x ⑺S 180n x y arctg α⑹mRsin α'y ⑸p]K)cos α'[R(1x ⑷34560R l 240R l 2l ⑶m 2688R l 24R l ⑵p R π)l -90(2l ⑴α'Z 1Z1111101220000045230034200+=+===-+=+=⋅+=+=+-=+-=-==说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n 的取值如下:⎪⎩⎪⎨⎧=<<⎪⎩⎪⎨⎧=><⎪⎩⎪⎨⎧=<>⎪⎩⎪⎨⎧=>>1n 0y 0x 1n 0y 0x 2n 0y 0x 0n 0y 0x 00000000 当只知道HZ 点的坐标时,则:l 为到点HZ 的长度α为过点HZ 的切线方位角再加上180°K 值与知道ZH 点坐标时相反x Z ,y Z 为点HZ 的坐标三、曲线要素计算公式β+∆=+=+=+-=++=++++-=++++-=-=-=+-=+-===+=+==D l l :βR R R2R P P 2β⒀曲线段长度:l )l l (21R αL ⑿圆曲线长度)l l (21R α⑾曲线全长度:L m 2α2R)tg p p (212α2tg p pT ⑽第二切线长:m 2α2R)tg p p (212α2tg p pT ⑼第一切线长:2688R l 24R l p ⑻第二曲线平移量:2688R l 24R l p ⑺第一曲线平移量:34560R l 240R l2l m ⑹第二曲线顺移量:34560R l 240R l 2l m ⑸第一曲线顺移量:2Rl β:⑷第二缓曲段总转角值2Rl β:⑶第一缓曲段总转角值)lP P (21l R R 2R R :β⑵曲线段任意点转角值2Rl l :β⑴缓曲段任意点转角值212121210212212121211213422223412114522322245123111221121212102的边缘曲线长度⒁偏离缓曲:D公式中各符号说明:l ——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度) l 1——第一缓和曲线长度l 2——第二缓和曲线长度l 0——对应的缓和曲线长度R ——圆曲线半径R 1——曲线起点处的半径R 2——曲线终点处的半径P 1——曲线起点处的曲率P 2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i 1(上坡为“+”,下坡为“-”)②第二坡度:i 2(上坡为“+”,下坡为“-”)③变坡点桩号:S Z④变坡点高程:H Z⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:)i i T(412R T E ⑷i Ri 212R )i i R(21l H ⑶H i i 2T⑵R (带有符号)S S l ⑴122021212Z 12Z -==-⎥⎦⎤⎢⎣⎡+++=-=-=五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K 0③曲线终点桩号:K 1④曲线起点坐标:x 0,y 0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P 0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P 1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程: ααα Bcos NAsinT y y BsinTNAcosT x x 42240C l l 336C l l 6C l l B 3456C l l 40C l l )l (l A /2C l N αT )/2/Cl S(l α P P l C SNl l )P /(P P Nl l K K l )P SGN(P N 时:P P ⑶当αα )/P cos α(cos αy y )/P sin α(sin αx x αSP α 0时:P P ⑵当αα Ssin αy y Scos αx x 0时:P P ⑴当K -K S 10T 0051111370733499250502000101S0010S 001S 01101T 10101010011100T 0000100+=++=-+=-+---=-+---=-=+=-=+=-=-=-=≠=--=-+=+=≠==+=+====T。
高速公路线路坐标、高程计算公式、
高速公路的一些线路坐标、高程计算公式缓和曲线、竖曲线、圆曲线、匝道))(缓和曲线、竖曲线、圆曲线、匝道一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
高速公路的一些线路坐标、高程计算公式
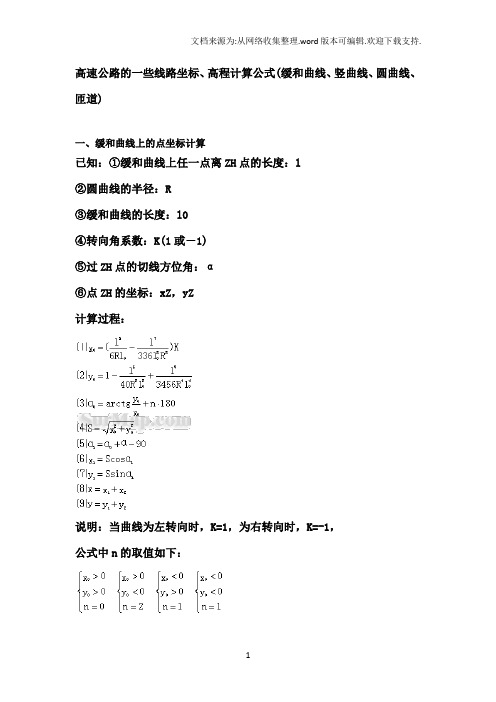
高速公路的一些线路坐标、高程计算公式(缓和曲线、竖曲线、圆曲线、匝道)一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
高速公路坐标计算方法
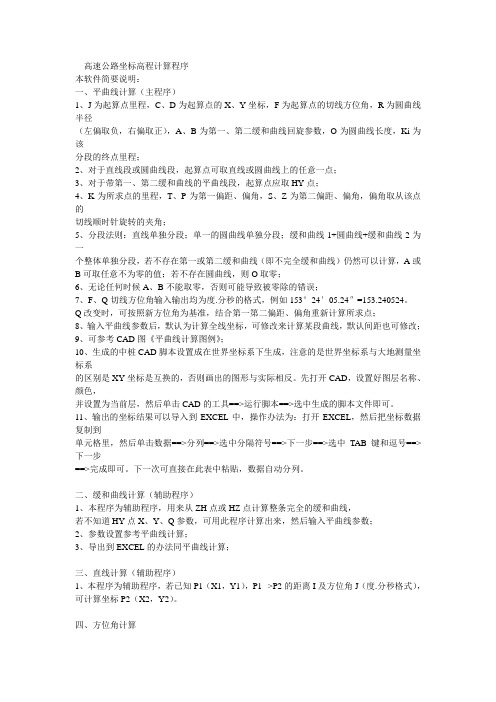
高速公路坐标高程计算程序本软件简要说明:一、平曲线计算(主程序)1、J为起算点里程,C、D为起算点的X、Y坐标,F为起算点的切线方位角,R为圆曲线半径(左偏取负,右偏取正),A、B为第一、第二缓和曲线回旋参数,O为圆曲线长度,Ki为该分段的终点里程;2、对于直线段或圆曲线段,起算点可取直线或圆曲线上的任意一点;3、对于带第一、第二缓和曲线的平曲线段,起算点应取HY点;4、K为所求点的里程,T、P为第一偏距、偏角,S、Z为第二偏距、偏角,偏角取从该点的切线顺时针旋转的夹角;5、分段法则:直线单独分段;单一的圆曲线单独分段;缓和曲线1+圆曲线+缓和曲线2为一个整体单独分段,若不存在第一或第二缓和曲线(即不完全缓和曲线)仍然可以计算,A或B可取任意不为零的值;若不存在圆曲线,则O取零;6、无论任何时候A、B不能取零,否则可能导致被零除的错误;7、F、Q切线方位角输入输出均为度.分秒的格式,例如153°24′05.24″=153.240524。
Q改变时,可按照新方位角为基准,结合第一第二偏距、偏角重新计算所求点;8、输入平曲线参数后,默认为计算全线坐标,可修改来计算某段曲线,默认间距也可修改;9、可参考CAD图《平曲线计算图例》;10、生成的中桩CAD脚本设置成在世界坐标系下生成,注意的是世界坐标系与大地测量坐标系的区别是XY坐标是互换的,否则画出的图形与实际相反。
先打开CAD,设置好图层名称、颜色,并设置为当前层,然后单击CAD的工具==>运行脚本==>选中生成的脚本文件即可。
11、输出的坐标结果可以导入到EXCEL中,操作办法为:打开EXCEL,然后把坐标数据复制到单元格里,然后单击数据==>分列==>选中分隔符号==>下一步==>选中TAB键和逗号==>下一步==>完成即可。
下一次可直接在此表中粘贴,数据自动分列。
二、缓和曲线计算(辅助程序)1、本程序为辅助程序,用来从ZH点或HZ点计算整条完全的缓和曲线,若不知道HY点X、Y、Q参数,可用此程序计算出来,然后输入平曲线参数;2、参数设置参考平曲线计算;3、导出到EXCEL的办法同平曲线计算;三、直线计算(辅助程序)1、本程序为辅助程序,若已知P1(X1,Y1),P1-->P2的距离I及方位角J(度.分秒格式),可计算坐标P2(X2,Y2)。
高速公路的一些线路坐标

高速公路的一些线路坐标、高程计算公式(缓和曲线、竖曲线、圆曲线、匝道)高速公路的一些线路坐标、高程计算公式(缓和曲线、竖曲线、圆曲线、匝道)一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
(整理)高速公路各线形计算公式
高速公路的一些线路坐标、高程计算公式(缓和曲线、竖曲线、圆曲线、匝道)一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:x Z,y Z计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反x Z,y Z为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:x Z,y Z计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反x Z,y Z为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:S Z④变坡点高程:H Z⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
高速公路线路(缓和曲线、竖曲线、圆曲线、匝道)坐标计算公式【精选】

高速公路线路(缓和曲线、竖曲线、圆曲线、匝道)坐标计算公式【精选】高速公路的一些线路坐标、高程计算公式(缓和曲线、竖曲线、圆曲线、匝道)一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
(整理)公路测量中的计算公式总结

公路测量中的计算公式总结一、方位角的计算公式1. 字母所代表的意义:x1:QD的X坐标y1:QD的Y坐标x2:ZD的X坐标y2:ZD的Y坐标S:QD~ZD的距离α:QD~ZD的方位角2. 计算公式:1)当y2- y1>0,x2- x1>0时:2)当y2- y1<0,x2- x1>0时:3)当x2- x1<0时:二、平曲线转角点偏角计算公式1. 字母所代表的意义:α1:QD~JD的方位角α2:JD~ZD的方位角β:JD处的偏角2. 计算公式:β=α2-α1(负值为左偏、正值为右偏)三、平曲线直缓、缓直点的坐标计算公式1. 字母所代表的意义:U:JD的X坐标V:JD的Y坐标A:方位角(ZH~JD)T:曲线的切线长,D:JD偏角,左偏为-、右偏为+2. 计算公式:直缓(直圆)点的国家坐标:X′=U+Tcos(A+180°) Y′=V+Tsin(A+180°)缓直(圆直)点的国家坐标:X″=U+Tcos(A+D)Y″=V+Tsin(A+D)四、平曲线上任意点的坐标计算公式1. 字母所代表的意义:P:所求点的桩号B:所求边桩~中桩距离,左-、右+ M:左偏-1,右偏+1C:JD桩号D:JD偏角L s:缓和曲线长A:方位角(ZH~JD)U:JD的X坐标V:JD的Y坐标T:曲线的切线长,I=C-T:直缓桩号J=I+L:缓圆桩号:圆缓桩号K=H+L:缓直桩号2. 计算公式:1)当P中桩坐标:X m=U+(C-P)cos(A+180°) Y m=V+(C-P)sin(A+180°)边桩坐标:X b=X m+Bcos(A+90°)Y b=Y m+Bsin(A+90°)2)当I中桩坐标:X m=U+Tcos(A+180°)+GcosO Y m=V+Tsin(A+180°)+GsinO边桩坐标:X b=X m+Bcos(A+MW+90°)Y b=Y m+Bsin(A+MW+90°)3)当J中桩坐标:边桩坐标:X b=X m+Bcos(O+MW+90°)Y b=Y m+Bsin(O+MW+90°)4)当H中桩坐标:X m=U+Tcos(A+MD)+GcosO Y m=V+Tsin(A+MD)+GsinO边桩坐标:X b=X m+Bcos(A+MD-MW+90°) Y b=Y m+Bsin(A+MD-MW+90°)5)当P>K时中桩坐标:X m=U+(T+P-K)cos(A+MD)Y m=V+(T+P-K)sin(A+MD)边桩坐标:X b=X m+Bcos(A+MD+90°)Y b=Y m+Bsin(A+MD+90°)注:计算公式中距离、长度、桩号单位:“米”;角度测量单位:“度”;若要以“弧度”为角度测量单位,请将公式中带°的数字换算为弧度。
高速公路坐标计算公式
高速公路线路(缓和曲线、竖曲线、圆曲线、匝道) 坐标计算公式高速公路的一些线路坐标、高程计算公式(缓和曲线、竖曲线、圆曲线、匝道)一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
高速公路曲线、匝道的坐标、高程计算公式

高速公路曲线、匝道的坐标、高程计算公式一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
公路平曲线坐标计算公式

O:缘和曲线起点里程
C:缘和曲线起点X坐标
Q:起始方位角(当J=-1时,方位角应+180。)
Z:偏角判定值(当J=1时,左偏为-1,右偏为1;当J=-1时,左偏为1,右偏为-1)
D:距中桩的距离
S:斜交角度
F:缘和曲线起点Y坐标
2、圆曲线
Lb10
{K,D}
①L=K-0
②X=C+R[sin(Q+L/R*180/π)-sinQ]+Dcos(Q+L/R*180/π+S)◢
③Y=F+LsinQ+Dsin(Q+S)◢
Goto 0
注:K:欲求点里程
O:直线起点里程
C:直线起点X坐标
Q:起始方位角
D:距中桩的距离
S:斜交角度
F:直线起点Y坐标
二、竖曲线计算公式
Lb1 0
①{K}
②L=K-(0-T)
③H=M-IT+LI-ZL2/2/R◢
Goto 0
注:K:欲求点里程
O:顶点里程
③Y=F-R[cos(Q+L/R*180/π)-cosQ]+Dsin(Q+L/R*180/π+S)◢
Goto 0
注:K:欲求点里程
O:圆曲线起点里程
C:圆曲线起点X坐标
R:圆曲线半径(左偏为负)
Q:起始方位角
D:距中桩的距离
S:斜交角度
F:圆曲线起点Y坐标
3、直线
Lb10
{K,D}
①L=K-0
②X=C+LcosQ+Dcos(Q+S)◢
一、公路平曲线坐标计算公式
1、缘和曲线:
高速公路曲线、匝道的坐标、高程计算公式

高速公路曲线、匝道的坐标、高程计算公式一、缓和曲线上的点坐标计算:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,那么:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,那么:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度〔或缓曲上任意点到缓曲起点的长度〕l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算:①第一坡度:i1(上坡为“+〞,下坡为“-〞)②第二坡度:i2(上坡为“+〞,下坡为“-〞)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点〔过渡段终点〕的间隔:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-〞,右转为“+〞)⑦曲线终点处曲率:P1(左转为“-〞,右转为“+〞)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
高速公路的一些线路坐标高程计算公式
高速公路的一些线路坐标、高程计算公式(缓和曲线、竖曲线、圆曲线、匝道)一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
公路工程各点方位角及坐标计算公式
公路工程各点方位角及坐标计算公式(一)各点方位角计算:1、第一直线段(K0~ZH):F=arctgΔY/ΔX 注:直线方位角要考虑象限角才能定出正确线路走向2、第一缓和曲线段(KZH~KHY):δ1=(K0-KZH)2/(2RLh)×180/π3、圆曲线段(KHY~KYH):δ2=[2(K0-KZH)-Lh]/2R×180/πδ2=(KHY-KZH)/2R×180/π+(K0-KHY)/R×180/π无缓和曲线时:δ2=(K0-KHY)/R×180/π(即圆曲线圆心角)4、第二缓和曲线段(KYH~KHZ):δ3=(KHZ-K0)2/(2RLh)×180/π5、第二直线段(KHZ~KZH):F±α(左偏时F-α,右偏时F+α)注:K0——计算点的里程α——曲线交点偏角Lh——缓和曲线长(注意有时第一和第二缓和曲线长不一样)(二)各点坐标计算XZH=XJD-T?CosF XHZ=XJD+T?Cos(F±α)YZH=YJD-T?SinF YHZ=YJD+T?Sin(F±α)1、第一直线段:X=XZH+(K0-KZH)?CosF中桩Y=YZH+(K0-KZH)?SinFX边=X中±B?Cos(F-Δ)边桩Y边=Y中±B?Sin(F-Δ)注:B——中桩至所求点的距离(左幅时为+B,右幅时为-B,当设计轴线与线路不垂直时B取斜长,即B/SinΔ)设计轴线线路方向BΔ图S-12、第一缓和曲线段:XX=XZH-Y′?Sinθ+X′?Cosθ X X′ X′中桩′Y=YZH+Y′?Cosθ+X′?SinθYZH Y θ HZX边=X中±B?Cos(F+μδ1-Δ) HY YH边桩Y边=Y中±B?Sin(F+μδ1-Δ) JDY′注:(本公式只适用与图S-2线形)图S-2μ——曲线左转为-1,右转为+1θ——线路方位角与Y轴所夹的锐角,见图S-2Y′=L-L5/(40R2Lh2);X′=L3/(6RLh)-L7/(336R3Lh3);(R—圆曲线半径,L —缓和曲线上任一点至曲线起点长度)3、圆曲线段:X=XHY+2R?Sinφ?Cos(F+μ(ξ+φ))中桩Y=YHY+2R?Sinφ?Sin(F+μ(ξ+φ))X边=X中±B?Cos(F+μδ2-Δ)边桩Y边=Y中±B?Sin(F+μδ2-Δ)注:φ=(K0-KHY)/2R×180/π;ξ=(KHY-KZH)/2R×180/π4、第二缓和曲线段:X=XHZ-Y′?Sinθ+X′?Cosθ中桩Y=YHZ-Y′?Cosθ-X′?SinθX边=X中±B?Cos(F+μδ1-Δ)边桩Y边=Y中±B?Sin(F+μδ1-Δ)注:1、本公式只适用与图S-2线形,其他线形可根据本线形公式变换2、式中符号与第一缓和曲线意义相同3、注意有时第一缓和曲线长和第二缓和曲线长不一样4、第二直线段:X=XHZ+(K0-KHZ)?Cos(F±α)中桩Y=YHZ+(K0-KHZ)?Sin(F±α)X边=X中±B?Cos(F±α-Δ)边桩Y边=Y中±B?Sin(F±α-Δ)注:F——第一直线段的方位角(三)用CASIO fx-4500P计算已知坐标点在线路上的里程和距中线距离1、直线段(已知坐标X、Y)Pol(X-XHZ,Y-YHZ):K=V?Cos(F-W)+KHZ B=V?Sin(F-W)注:1、在fx-4500P中计算结果存入变量储存区V和W,要显示储存区内容时按RCL V 、 W 键。
高速公路计算公式
高速公路的一些线路计算一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH 点的长度:l②圆曲线的半径:R ③缓和曲线的长度:l 0 ④转向角系数:K(1或-1) ⑤过ZH 点的切线方位角:α ⑥点ZH 的坐标:x Z ,y Z 计算过程:yy x x αy αx ααy x xy αl 3456R l l 40R l y R336l l 6Rl l x Z1Z 1111101202000449202533730⑼y ⑻x Ssin ⑺Scos ⑹90α⑸⑷S 180n arctg ⑶l⑵)K (⑴+=+===+=+=+=+==说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n 的取值如下:=<<=><=<>=>>1n 001n 002n 000n 00yx yx yx yx 0000000当计算第二缓和曲线上的点坐标时,则: l 为到点HZ 的长度α为过点HZ 的切线方位角再加上180° K 值与计算第一缓和曲线时相反 x Z ,y Z 为点HZ 的坐标切线角计算公式:2Rl l β02=二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH 点的长度:l②圆曲线的半径:R ③缓和曲线的长度:l 0 ④转向角系数:K(1或-1) ⑤过ZH 点的切线方位角:α ⑥点ZH 的坐标:x Z ,y Z 计算过程:yy x x αy αx ααy x xy αy x 34560R l 240R l l2688Rlll -90(2l Z1Z 1111101202000045233420⑿y ⑾x Ssin ⑽Scos ⑼90α⑻⑺S 180n arctg ⑹mRsinα'⑸p]K )cosα'[R(1⑷2⑶m 24R ⑵p Rπ)⑴α'+=+===+=+=+=+=+=+===说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n 的取值如下:⎪⎩⎪⎨⎧=<<⎪⎩⎪⎨⎧=><⎪⎩⎪⎨⎧=<>⎪⎩⎪⎨⎧=>>1n 0y 0x 1n 0y 0x 2n 0y 0x 0n 0y 0x 00000000 当只知道HZ 点的坐标时,则:l 为到点HZ 的长度α为过点HZ 的切线方位角再加上180° K 值与知道ZH 点坐标时相反 x Z ,y Z 为点HZ 的坐标三、曲线要素计算公式β+∆=+=+=+-=++=++++-=++++-=-=-=+-=+-===+=+==D l l :βR R R2R P P 2β⒀曲线段长度:l )l l (21RαL ⑿圆曲线长度)l l (21Rα⑾曲线全长度:L m 2α2R)tg p p (212α2tgp p T ⑽第二切线长:m 2α2R)tg p p (212α2tgp p T ⑼第一切线长:2688R l 24R l p ⑻第二曲线平移量:2688R l 24R l p ⑺第一曲线平移量:34560R l 240R l 2l m ⑹第二曲线顺移量:34560R l 240R l 2l m ⑸第一曲线顺移量:2Rl β:⑷第二缓曲段总转角值2R l β:⑶第一缓曲段总转角值)lP P (21l R R 2RR :β⑵曲线段任意点转角值2Rl l :β⑴缓曲段任意点转角值212121210212212121211213422223412114522322245123111221121212102的边缘曲线长度⒁偏离缓曲:D 公式中各符号说明:l ——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度) l 1——第一缓和曲线长度 l 2——第二缓和曲线长度 l 0——对应的缓和曲线长度R ——圆曲线半径 R 1——曲线起点处的半径 R 2——曲线终点处的半径 P 1——曲线起点处的曲率 P 2——曲线终点处的曲率 α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i 1(上坡为“+”,下坡为“-”)②第二坡度:i 2(上坡为“+”,下坡为“-”) ③变坡点桩号:S Z ④变坡点高程:H Z ⑤竖曲线的切线长度:T ⑥待求点桩号:S计算过程:)i i T(412R T E ⑷i Ri 212R )i i R(21l H ⑶H i i 2T⑵R (带有符号)S S l ⑴122021212Z 12Z -==-⎥⎦⎤⎢⎣⎡+++=-=-=五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K③曲线终点桩号:K1④曲线起点坐标:x0,y⑤曲线起点切线方位角:α⑥曲线起点处曲率:P(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”) 求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:αααy y x x 42240C l l 336C l l l l 3456C ll 40C l l l (l A l αT l S(l αP P ll l P /(P P Nl l K K l P SGN(P N P P αα)/P cosα(cosαy y )/P sinα(sinαx x αSP αP P ααSsinαy y Scosαx x P P K-K S 1T00511011370733490925520011S 01S1S111T11111110T100 Bcos NAsinT BsinT NAcosT 6C B ) /2C N )/2/C C SN ) ) 时:⑶当 0时:⑵当 0时:⑴当+=====+======+=+==+=+==++++=+=+====≠≠T。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
标计算公式A-回旋曲线参数”HXCS”B-转角值”ZJZ”C-判断是否继续计算?D-直线段方位角”FWJ”E-外矢距F-缓圆点桩号”HY”G-缓和曲线角H-曲线段内点的切线角,如在缓和曲线段内β=(P-M)2/2A2I-逐桩步长(即每多少米计算一个断面,用于逐桩计算。
I=0表示单次计算)J-导线点N坐标”DXD-N”K-导线点E坐标”DXD-E”L-缓和曲线长M-直缓点桩号”ZH”N-缓直点桩号”HZ”O-导线点桩号”DXD”P-待求点桩号”DQD”Q-曲线长R-圆曲线半径”RAD”S-切线加长T-切线长U-待求点边桩N坐标”BZ-N”V-待求点边桩E坐标”BZ-E”W-中边距”ZBJL”X-待求点中桩N坐标”DQD-N”Y-待求点中桩E坐标”DQD-E”Z-圆曲线相对切线内移量************************************************************ 计算方法:先根据桩号位置判断所在计算区间,然后调入相应区间的计算参数,进行计算。
把各个区间的参数做成对应的子程序集,调入相应区间的计算参数其实就是调用相应的子程序,对计算参数进行初始化。
注意:变量初始化和新的变量覆盖原变量的问题。
(专用符号: )缓和曲线特征:ρl= RL=A 2************************************************************ 计算过程:一、第一直线段直接通过里程差和方位角计算待求点的中、边桩坐标。
二、第一缓和曲线段采用以ZH 点(直缓点)为原点,以通过该点的切线方向为Y轴,法线为X 轴,建立直角坐标系,计算中桩坐标。
边桩,以过待求点的切线方位角β=L 2/2A 2,(其中,L 为待求点到ZH 点的里程,A 为缓和曲线参数)可以计算出边桩的方位角和坐标,再转换成大地坐标系坐标。
三、圆曲线段采用以过HY 缓圆点的切线为Y 轴,以该点的法线为X 轴,建立直角坐标系,计算圆曲线段内各点的中、边桩坐标,再转换成大地坐标系坐标。
四、第二缓和曲线段采用以HZ 点(缓直点)为原点,以通过该点的切线方向为Y轴,法线为X 轴,建立直角坐标系,计算中桩坐标。
边桩,以过待求点的切线方位角β=L 2/2A 2,(其中,L 为待求点到ZH 点的里程,A 为缓和曲线参数)可MAINCURVE HY-YH LINEZH-HY YH-HZPARAM-n计算出边桩的方位角和坐标,(注意,Y坐标值的符号)再转换成大地坐标系坐标。
五、第二直线段以下一个导线点为基点,计算步骤同第一条,计算待求点坐标。
六、把各个ZH、HZ点坐标组合成数组,用于判断待求点位置和作为中间计算用。
七、曲线计算坐标与大地坐标转换公式:X=x o’+x p cosA-y p sinA Y=y o’+y p cosA+x p sinAZH-HY段:(注:A为以ZH点为原点的X轴方位角。
向左转A为直线段方位角D-90°;向右转A为直线段方位角D+90°);HY-YH段:(注:A为以HY点为原点的X轴防卫角。
向左转A为直线段方位角D-G-90°;向右转A为直线段方位角D+G+90°。
);YH-HZ段:(注:A为以HZ点为原点的X轴方位角。
向左转A为直线段方位角D+转角值B-90°;向右转A为直线段方位角D+转角值B+90°)************************************************************PARAM-n//初始化计算参数,每个程序存储一组参数。
LINE //待求点位置在直线段内的计算子程序,计算待求点的中桩、边桩坐标。
CURVE //待求点位置在曲线段内的入口程序。
判断在曲线的那部分,并调用相应的子程序进行计算。
ZH-HY //待求点位置在曲线段的直缓-缓圆内(第一缓和曲线段内),计算待求点的中桩、边桩坐标。
HY-YH//待求点位置在曲线段的圆曲线段内,计算待求点的中桩、边桩坐标。
YH-HZ //待求点位置在曲线段的圆缓-缓直内(第二缓和曲线段内),计算待求点的中桩、边桩坐标。
************************************************************Lbl 1: Defm 6 // 扩展6个字节的内存供数组变量使用即Z[1]~Z[6]用以存储ZH、HY、HZ点的坐标。
Z[1]=0:Z[2]=0:Z[3]=0:Z[4]=0:Z[5]=0:Z[6]=0:A=0:B=0:C=0:D=0:E=0: F=0:G=0:H=0:I=0:J=0:K=0:L=0:M=0:N=0:O=0:P=0:Q=0:R=0:S=0:T=0:U=0:V=0:W=0:X=0:Y=0:Z=0//对所有变量初始化。
//以下为输入逐桩步长I、待求点P的桩号,并判断P点桩号是否小于0。
Lbl 2:{I,P}:I”ZZBC?”:P”DQD:”P<0=>Goto n+3≠=>Goto 3Lbl 3:Prog “PARAMS-1”//调用子程序,初始化计算参数Lbl 4:P≤N=>Goto n+1≠=>Prog “PARAMS-2”Lbl 5:P≤N=>Goto n+1≠=>Prog “PARAMS-3”Lbl 6:……Lbl n:P≤N=>Goto n+1≠=>”ERROR”:Goto n+4 //n为第n个判断的行号,N为缓直点HZ桩号。
调用相应的子程序对计算参数进行初始化,再与P点进行比对,确定P点的位置,主要是比较各个弯道的HZ点和P点的位置关系。
Lbl n+1:P≤M=>Prog “LINE”≠=>Prog “CURVE” //判断P点和ZH点的位置关系,并调用相应的子程序。
Lbl n+2:I=0=>Goto n+3≠=>Goto 2 //判断是否是逐桩计算。
Lbl n+3:{C}:C”CONTINUE? 1 YES / 0 NO:”:C=1=>Goto 2≠=>Goto n+4 Lbl n+4:Defm 0:”EXIT MAIN”//释放内存并退出程序** PARAM-n//计算相关参数并进行设置,每个导线点对应一个O”导线点桩号”=?:J”DXD-N”=?:K”DXD-E”=?:Z[1]”ZH-N”=?:Z[2]”ZH-E”=?:Z [3]”HY-N”=?:Z[4]”HY-E”=?:Z[5]”HZ-N”=?:Z[6]”HZ-E”=?:D”直线段方位角”=?:B”转角值:左-,右+”=?:A”回旋参数”=?:R”RAD”=?:L”缓和曲线”=A2÷R:G”缓和曲线角”=L/2R:S”切线加长”=L÷2-L3÷(240R2):Z”圆曲线相对切线内移量”=L 2÷24R:T“切线长”=S+(R+Z)×Tan(B÷2):Q“曲线长”=2L+R(B-2G)π÷180:E”外矢距”=(R+S)×Sec(B÷2)-R:M”ZH桩号”=O-T:F”HY桩号”=M+L:N”HZ桩号”=M+ Q************************************************************ LINE//计算直线段待求点中、边桩坐标Lbl 1:P”DQD”Lbl 2:X”ZZ-N”=J+(P-O)×Cos D Y”ZZ-E”=K+(P-O)×Sin D //计算待求点坐标。
Lbl 3:{W}:W”ZBJL: Z-,Y+” //输入边桩和中桩的距离W=0=>Goto 5Lbl 4:U”BZ-N”=X+Abs W×Cos(D+90W÷Abs W) //计算边桩坐标。
V”BZ-E”=Y+Abs W×Sin(D+90W÷Abs W) //计算边桩坐标。
Lbl 5:I=0=>Goto 8≠=>P=P+I //判断是否为逐桩计算。
如果是,计算下一个点的桩号。
6:P≥0=>Goto 7≠=>Goto 9 //判断新的待求点是否在本子程序计算范围Lbl 7:P≤M=>Goto 1≠=>Goto 9 //判断新的待求点是否在本子程序计算范围Lbl 8:{C}:C”CONTINUE? 1 YES / 0 NO:”//是否继续计算本段内的其他边桩。
C=1=>Goto 1≠=>Goto 9Lbl 9:”EXIT LINE”//退出LINE子程序,返回MAIN程序。
************************************************************ CURVE//判断待求点在曲线段的哪一部分,再调用相应的子程序进行计算。
Lbl 1:P”DQD” //显示待求点桩号Lbl 2:P≤M=>Goto 6≠=>Goto 3Lbl 3:P<M+L=>Prog “ZH-HY”:Goto 6≠=>Goto 4Lbl 4:P<M+Q-L=>Prog “HY-YH”:Goto 6≠=>Goto 5Lbl 5:P≤M+Q=>Prog “YH-HZ”≠=>Goto 6Lbl 6:”EXIT CURVE”//退出CURVE子程序,返回MAIN程序************************************************************ ZH-HY//计算待求点在ZH-HY段内的中、边桩坐标Lbl 1:P”DQD” //显示待求点桩号Lbl 2:X=(P-M)3÷(6RL)-(P-M)7÷(336R3L3)+(P-M)11÷(42240(R5L5)-(P-M)15÷(9 676800R7L7)+(P-M)19÷(3530096640R9L9)-(P-M)23÷(1.8802409472×1012×R11L11):Y=((P-M)-(P-M)5÷(40R2L2)+(P-M)9÷(3456R4L4)-(P-M)13÷(59 9040R6L6)+(P-M)17÷(175472640R8L8)-(P-M)21÷(7.80337152×1010×R10 L10))×(-B÷Abs B)X”DQD-N”=Z[1]+XCos(D+90B÷Abs B)-YSin(D+90B÷Abs B):Y”DQD-E ”=Z[2]+YCos(D+90B÷Abs B)+XSin(D+90B÷Abs B)//以ZH点为原点,过该点的切线为Y轴,法线为X轴建立直角坐标系,计算待求点的坐标,然后把待求点的坐标转换为大地坐标。