切比雪夫级数
切比雪夫多项式
切比雪夫多项式概述:切比雪夫多项式是与棣美弗定理有关,以递归方式定义的一系列正交多项式序列。
通常,第一类切比雪夫多项式以符号Tn表示,第二类切比雪夫多项式用Un表示。
切比雪夫多项式Tn 或Un 代表n 阶多项式。
切比雪夫多项式在逼近理论中有重要的应用。
这是因为第一类切比雪夫多项式的根(被称为切比雪夫节点)可以用于多项式插值。
相应的插值多项式能最大限度地降低龙格现象,并且提供多项式在连续函数的最佳一致逼近。
基本性质:对每个非负整数n,Tn(x) 和Un(x) 都为n次多项式。
并且当n为偶(奇)数时,它们是关于x 的偶(奇)函数,在写成关于x的多项式时只有偶(奇)次项。
按切比雪夫多项式的展开式:一个N 次多项式按切比雪夫多项式的展开式为如下,多项式按切比雪夫多项式的展开可以用Clenshaw 递推公式计算。
第一类切比雪夫多项式由以下递推关系确定。
也可以用母函数表示。
第二类切比雪夫多项式由以下递推关系给出。
此时母函数为Clenshaw递推公式在数值分析中,Clenshaw递推公式(由Charles William Clenshaw发现)是一个求切比雪夫多项式的值的递归方法。
切比雪夫多项式N次切比雪夫多项式,是下面形式的多项式p(x)其中T n是n阶切比雪夫多项式Clenshaw递推公式Clenshaw递推公式可以用来计算切比雪夫多项式的值。
给定我们定义于是(注)上面的公式在N=0,1的情况下无意义。
此时我们可以用下面的公式:(downward, omit if N=0)这里或者其中是第二类切比雪夫多项式棣莫弗(de Moivre)原理设两个复数(用三角形式表示)Z1=r1(cosθ1+isinθ1),Z2=r2(cosθ2+i sinθ2),则:Z1Z2=r1r2[cos(θ1+θ2)+isin(θ1+θ2)].解析证:先讲一下复数的三角形式的概念。
在复平面C上,用向量Z(a,b)来表示Z=a+bi.于是,该向量可以分成两个在实轴,虚轴上的分向量.如果向量Z与实轴的夹角为θ,这两个分向量的模分别等于rcosθ,risinθ(r=√a^2+b^2).所以,复数Z可以表示为Z=r(cosθ+isinθ).这里θ称为复数Z的辐角.因为Z1=r1(cosθ1+isinθ1),Z2=r2(cosθ2+isinθ2),所以Z1Z2=r1r2(cosθ1+isinθ1)(cosθ2+isinθ2)=r1r2(cosθ1cosθ2+icosθ1sinθ2+isinθ1cosθ2-sinθ1sinθ2)=r1r2[(cosθ1cosθ2-sinθ1sinθ2)+i(cosθ1sinθ2+sinθ1cosθ2)]=r1r2[cos(θ1+θ2)+isin(θ1+θ2)].其实该定理可以推广为一般形式:推广设n个复数Z1=r1(co sθ1+isinθ1),Z2=r2(cosθ2+isinθ2),……,Zn=rn(cosθn+isinθn),则:Z1Z2……Zn=r1r2……rn[cos(θ1+θ2+……+θn)+isin(θ1+θ2+……+θn)].解析证:用数学归纳法即可,归纳基础就是两个复数相乘的棣莫弗定理。
滤波器功率容量仿真

1功率容量仿真1.1 不同级数滤波器功率容量的仿真以下各图为4 ~8级切比雪夫滤波器的响应曲线和各谐振腔所承受的功率。
其中心频率均为1950MHz ,带宽均为100MHz ,回波损耗均为20dB ,输入功率均为40dBm 。
1.851.901.952.002.051.802.10-40-30-20-10-500freq, GHzd B (S (1,1))d B (S (2,1))1.91E9 1.93E9 1.95E9 1.97E9 1.99E91.89E92.01E9343638403242frd B m (v 1[::,1])d B m (v 2[::,1])d B m (v 3[::,1])d B m (v 4[::,1])1.851.901.952.002.051.802.10-50-40-30-20-10-60freq, GHzd B (S (1,1))d B (S (2,1))1.91E91.93E91.95E91.97E91.99E91.89E92.01E935403045frd B m (v 1[::,1])d B m (v 2[::,1])d B m (v 3[::,1])d B m (v 4[::,1])d B m (v 5[::,1])1.851.901.952.002.051.802.10-60-40-20-800freq, GHzd B (S (1,1))d B (S (2,1))1.91E91.93E91.95E91.97E91.99E91.89E92.01E935403045frd B m (v 1[::,1])d B m (v 2[::,1])d B m (v 3[::,1])d B m (v 4[::,1])d B m (v 5[::,1])d B m (v 6[::,1])1.851.901.952.002.051.802.10-80-60-40-20-1000freq, GHzd B (S (1,1))d B (S (2,1))1.91E91.93E91.95E91.97E91.99E91.89E92.01E935403045frd B m (v 1[::,1])d B m (v 2[::,1])d B m (v 3[::,1])d B m (v 4[::,1])d B m (v 5[::,1])d B m (v 6[::,1])d B m (v 7[::,1])1.851.901.952.002.051.802.10-80-60-40-20-100freq, GHzd B (S (1,1))d B (S (2,1))1.91E91.93E91.95E91.97E91.99E91.89E92.01E9354030frd B m (v 1[::,1])d B m (v 2[::,1])d B m (v 3[::,1])d B m (v 4[::,1])d B m (v 5[::,1])d B m (v 6[::,1])d B m (v 7[::,1])d B m (v 8[::,1])比较以上仿真结果可以看出,第一腔和最后一腔所承受的功率始终最小,且均小于输入功率。
切比雪夫多项式 degree
例如,切比雪夫多项式 T_3(x) 的度数为 3,表示它是一个三次多项式。切比雪夫多项式 T_5(x) 的度数为 5,表示它是一个五次多项式。
切比雪夫多项式在数学和工程领域有广泛的应用,例如在逼近理论、信号处理、图像处理 等领域中。通过调整切比雪夫多项式的度数,可以控制逼近函数的精度和特性。
切比雪夫多项式
切比雪夫多项式(Chebyshev polynomials)是一组具有特定性质的多项式函数。切比 雪夫多项式的度数(degree)通常表示为 n,表示多项式中最高次幂的指数。
切比雪夫多项式的一般形式为 T_n(x),其中 n 表示多项式的度数。例如,T_0(x) 是常数 函数,T_1(x) 是线性函数,T_2(x) 是二次函数,依此类推。
切比雪夫多项式(上)
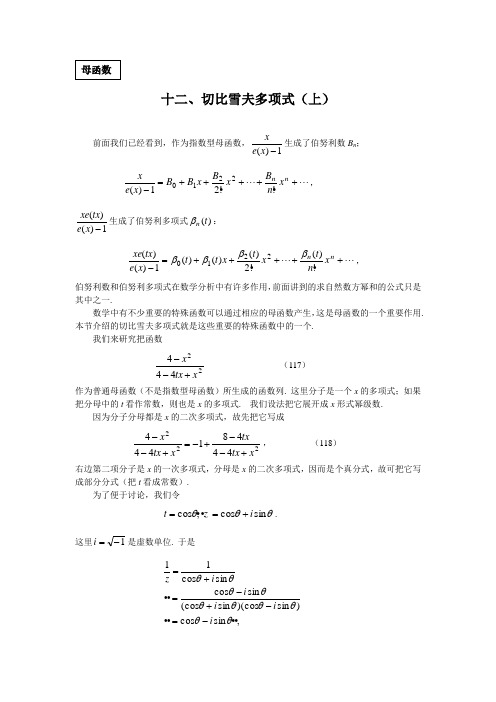
十二、切比雪夫多项式(上)前面我们已经看到,作为指数型母函数,1)(-x e x生成了伯努利数B n ;+++++=-n n x n•B x •B x B B x e x!!21)(2210,1)()(-x e tx xe 生成了伯努利多项式)(t n β:+++++=-n n x n•t x •t x t t x e tx xe !)(!2)()()(1)()(2210ββββ,伯努利数和伯努利多项式在数学分析中有许多作用,前面讲到的求自然数方幂和的公式只是其中之一.数学中有不少重要的特殊函数可以通过相应的母函数产生,这是母函数的一个重要作用. 本节介绍的切比雪夫多项式就是这些重要的特殊函数中的一个.我们来研究把函数22444xtx x +-- (117)作为普通母函数(不是指数型母函数)所生成的函数列. 这里分子是一个x 的多项式;如果把分母中的t 看作常数,则也是x 的多项式. 我们设法把它展开成x 形式幂级数.因为分子分母都是x 的二次多项式,故先把它写成22244481444xtx tx xtx x +--+-=+--, (118)右边第二项分子是x 的一次多项式,分母是x 的二次多项式,因而是个真分式,故可把它写成部分分式(把t 看成常数).为了便于讨论,我们令θθθsin cos ,cos i •z •t +==.这里1-=i 是虚数单位. 于是,sin cos )sin )(cos sin (cos sin cos sin cos 11••i ••i i i ••i z θθθθθθθθθθ-=-+-=+=所以 t zz 2cos 21==+θ. 这样一来,(118)右边第二项的分母便可写成,2112141244422••x z x z ••••••••••x x z z x tx ⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-=+⎪⎭⎫ ⎝⎛+-=+-于是,211121121121244482•x zx z ••••••••••x z x z txx tx tx-+-=⎪⎭⎫⎝⎛-⎪⎭⎫ ⎝⎛--=+-- 代入(118),便得(117)的部分分式展式:x zx z x tx x 2111211144422-+-+-=+-- . (119) 注意到,2221100∑∑∞=∞==⎪⎭⎫⎝⎛=-n n n nn nx z x z x z ,2121211100∑∑∞=∞==⎪⎭⎫ ⎝⎛=-n n n n n nnx z x z x z代入(119)得)120(.1211212144410022•••••••••••••x z z ••••••••••x zx z x tx x n n n n nnn nnnn nn⎪⎭⎫ ⎝⎛++=++-=+--∑∑∑∞=∞=∞=根据棣莫佛公式:)122(,sin cos )sin (cos 1)121(,sin cos )sin (cos ••••••••••••n i n i z••••••••••••n i n i z nnn n θθθθθθθθ-=-=+=+=由此得θn zz nn cos 21=+. (123)代入(120)有n n n x n x tx x ∑∞=-+=+--11222cos 1444θ,而t ••t•cos arc ,cos ==θθ,所以n n n x t n x tx x ∑∞=-+=+--11222)(arccos cos 1444.记),2,1(,)(arccos cos 21)(,1)(10 ••••n •••t n t ••T •t T n n ===- (124)这就是由母函数(117)所生成的函数列,称它们为切比雪夫多项式何以见得(124)是t 的多项式呢?仍用t arccos =θ代回,并注意到(121),(122),(123),就得,])1()1[(21])sin (cos )sin [(cos 21121cos 21)(arccos cos 21)(2211••t i t t i t ••••i i ••••z z t n t T n n nnn nn n n n n n --+-+=-++=⎪⎭⎫⎝⎛+===--θθθθθ利用二项式定理:,)1()1()1(,)1()1(202202•t i t C t i t ••t i t C t i t kn k k k k n k nn k nk k k n k n n--=---=-+∑∑=-=-于是∑=--+-=nk k k kk n k n nn t i t C t T 02])1(1[)1(21)(, (125)当k 取奇数值时,0)1(1=-+k ,故和式中只有k 取偶数值的那些项. 这样一来,(125)便可写成)126(.)1()1(21)1(221)(]2[02221]2[022222••••••••t t C ••••t i t C t T n r rn r r n r n n r rr r n r n nn ∑∑=--=---=-=这就证明了)(t T n 确实是个多项式,而且是n 次多项式,其中⎥⎦⎤⎢⎣⎡2n 如前所说是表示2n的整数部分,例如当n =8时,⎥⎦⎤⎢⎣⎡2n =[4]=4,当n =9时,4]5.4[292==⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡n .。
切比雪夫多项式定理

切比雪夫多项式定理切比雪夫多项式定理(Chebyshev Polynomial Theorem)是一个数学定理,由俄国数学家切比雪夫(Pafnuty Chebyshev)首先提出。
它是关于多项式的定理,描述了多项式在有界域内的行为。
该定理可以用来证明许多关于多项式的性质,也可以用来解决许多多项式问题。
定理的形式如下:给定函数f(x)在区间[a,b]上单调,其中a<b,假设函数f(x)具有n次可导的连续导数,并且f(x)的n-1次导数在[a,b]上单调。
如果f(x)可以由n 次切比雪夫多项式Pn(x)表示,则有:f(x)=Pn(x)+Rn(x)其中,Pn(x)是n次切比雪夫多项式,Rn(x)是n次余项,称为切比雪夫多项式定理。
从定理可以看出,如果f(x)在[a,b]上可以由n次切比雪夫多项式表示,那么f(x)可以被分解为两部分,一部分是切比雪夫多项式Pn(x),另一部分是余项Rn(x)。
该定理的重要性在于它提供了一种精确的方法来表示函数f(x)的行为,而不必使用近似解法。
此外,该定理也显示了函数f(x)的收敛性,即当n越大时,Pn(x)越接近f(x),Rn(x)越小。
根据切比雪夫多项式定理,可以得出一些有用的结论,如:(1)在[a,b]上,所有可导的函数f(x)都可以表示为一组切比雪夫多项式的和;(2)在[a,b]上,函数f(x)的收敛性,即当n越大时,Pn(x)越接近f(x),Rn(x)越小;(3)在[a,b]上,f(x)的最大值和最小值可以由切比雪夫多项式的绝对值来确定,即f max=max{|Pn(x)|}, f min=min{|Pn(x)|}(4)在[a,b]上,有f'(x)=P'n(x)+R'n(x)其中,P'n(x)是n次切比雪夫多项式的导数,R'n(x)是n次余项的导数。
切比雪夫多项式定理的应用非常广泛,在许多领域都有着广泛的应用,如量子力学、量子物理、量子化学、量子计算机、光电子学、电磁学、可编程逻辑控制器、信号处理、机器人学、计算机图形学、计算几何学、数值分析、系统工程、模式识别等等。
切比雪夫积分不等式
切比雪夫积分不等式切比雪夫积分不等式是一个经典的数学定理,又称切比雪夫不等式。
该定理最初是由俄国数学家切比雪夫所发现的,但是至今仍有很多研究者在研究该定理。
切比雪夫积分不等式在几何、代数、数学分析以及给定性质函数等领域中都具有重要意义。
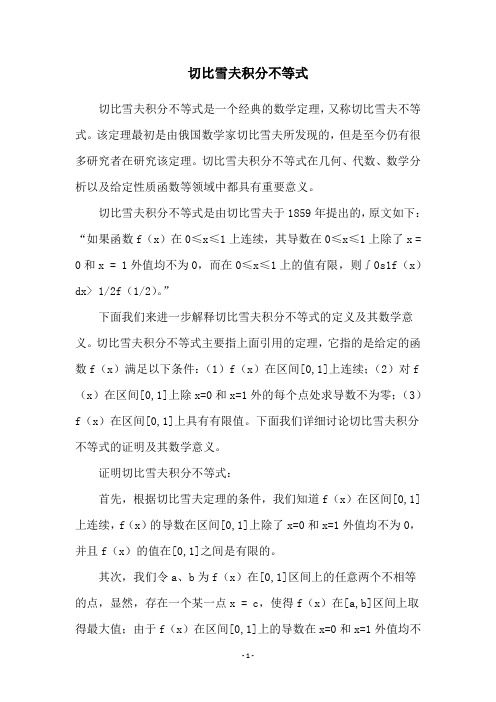
切比雪夫积分不等式是由切比雪夫于1859年提出的,原文如下:“如果函数f(x)在0≤x≤1上连续,其导数在0≤x≤1上除了x = 0和x = 1外值均不为0,而在0≤x≤1上的值有限,则∫0s1f(x)dx> 1/2f(1/2)。
”下面我们来进一步解释切比雪夫积分不等式的定义及其数学意义。
切比雪夫积分不等式主要指上面引用的定理,它指的是给定的函数f(x)满足以下条件:(1)f(x)在区间[0,1]上连续;(2)对f (x)在区间[0,1]上除x=0和x=1外的每个点处求导数不为零;(3)f(x)在区间[0,1]上具有有限值。
下面我们详细讨论切比雪夫积分不等式的证明及其数学意义。
证明切比雪夫积分不等式:首先,根据切比雪夫定理的条件,我们知道f(x)在区间[0,1]上连续,f(x)的导数在区间[0,1]上除了x=0和x=1外值均不为0,并且f(x)的值在[0,1]之间是有限的。
其次,我们令a、b为f(x)在[0,1]区间上的任意两个不相等的点,显然,存在一个某一点x = c,使得f(x)在[a,b]区间上取得最大值;由于f(x)在区间[0,1]上的导数在x=0和x=1外值均不为0,并且f(x)在区间[0,1]上具有有限值,因此可以得出最大值的点c处的导数为0,即f(c)= 0继续往下,由于f(x)在[a,b]区间上是连续的,所以可以于当a x c时f(x)的导数为正,当c x b时f(x)的导数为负。
从而可以得出∫a bf(x)dx = 0而前面我们说过,c为f(x)在[a,b]区间上取得最大值的点,因此f(c)≥f(x)(x为[a,b]区间上任一点)结合上述两个等式,我们可以得出切比雪夫积分不等式:∫0s1f(x)dx> 1/2f(1/2)从这里我们可以推出,当f(x)在[0,1]区间上取得最大值时,其积分值会大于等于1/2f(1/2)切比雪夫积分不等式可以说是一个几何性质,但也可以具有更广泛的应用,例如在数学分析中,有时需要证明某种定义或性质,例如f(x)是否满足Rolle定理。
二类切比雪夫多项式 逼近
二类切比雪夫多项式逼近随着科学技术的不断发展,人们对于精度要求的越来越高。
在现代数学中,逼近理论起着非常重要的作用。
在数学中,逼近是指一组函数序列以无限接近的方式,趋于某一个目标函数。
其中,二类切比雪夫多项式逼近是重要的逼近方法之一。
第一步:定义二类切比雪夫多项式逼近,即是在二类切比雪夫条件下进行的一种函数逼近方法。
所谓二类切比雪夫条件,指的是对于一定的误差范围,用多项式函数逼近目标函数。
二类切比雪夫多项式逼近的基本思想是,选取一类特殊的多项式函数族,并在这个函数族中寻找最优的逼近函数。
第二步:简介切比雪夫多项式是一类非常重要的多项式函数族。
它们不仅在逼近理论中具有很高的实用价值,还在数值计算等领域不断发挥着宝贵的作用。
而二类切比雪夫多项式,则是切比雪夫多项式的另一个重要分支。
二类切比雪夫多项式的定义如下:T<sub>0</sub>(x) = 1T<sub>1</sub>(x) = 2xT<sub>n</sub>(x) = 2xT<sub>n-1</sub>(x)-T<sub>n-2</su b>(x) (n≥2)第三步:逼近过程针对一个给定的函数 f(x),首先我们要找到 f(x) 与此时函数族的误差 e(x),即:|f (x) − P<sub>n</sub>(x)|≤e(x) (其中,P<sub>n</sub>(x) 是一个在切比雪夫多项式族中的函数,满足误差e(x) 尽可能的小),然后我们要确定一个函数 Q<sub>n</sub>(x),它是在 n 阶二类切比雪夫多项式的族中,最符合函数 f(x) 的函数,即函数 f(x) 与函数 Q<sub>n</sub>(x) 之间的误差 Q(x) 最小化。
切比雪夫多项式观下的最值问题
切比雪夫多项式观下的最值问题
我们要解决一个关于切比雪夫多项式的最值问题。
切比雪夫多项式是一种在数学和物理中常见的函数,它具有一些特殊的性质,例如它的所有根都在实数范围内。
假设我们要找的是第 n 阶切比雪夫多项式的最大值和最小值。
切比雪夫多项式可以表示为 T_n(x),它满足以下递推关系:
T_0(x) = 1
T_1(x) = x
T_{n+1}(x) = 2x T_n(x) - T_{n-1}(x)
为了找到多项式的最大值和最小值,我们需要找到它的根。
由于切比雪夫多项式的所有根都在实数范围内,我们可以使用数值方法来找到这些根。
对于第 n 阶切比雪夫多项式,其最大值为:sqrt(2n + 1)
其最小值为:-sqrt(2n + 1)
因此,对于任何给定的 n,切比雪夫多项式的最大值和最小值分别为
sqrt(2n + 1) 和 -sqrt(2n + 1)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
算法说明: 当一个连续函数定义在区间[-1,1]上时,它可以展开成切比雪夫级数。即:
0()()nnnfxfTx
其中()nTx为n次切比雪夫多项式,具体表达可通过递推得出: 0()1Tx,1()Txx
11()2nnnTxxTxTx
它们之间满足如下的正交关系:
1210,()(),021,0nmnmTxTxdxnmxnm
在实际应用中,可根据所需的精度来截取有限的项数,切比雪夫级数中的系数由下式决定: 10211()1fxfdxx
1212()()1nTxfxfdxx
在MATLAB中编程实现的切比雪夫逼近法函数为:Chebyshev。 功能:用切比雪夫多项式逼近已知函数。
调用格式:Chebyshev(y,k,x0)f 其中,y为已知函数; k为逼近已知函数所需项数; f是求得的切比雪夫逼近多项式在x0处的逼近值。
程序源代码(m文件): function f = Chebyshev(y,k,x0) %用切比雪夫多项式逼近已知函数 %已知函数:y %逼近已知函数所需项数:k %逼近点的x坐标:x0 %求得的切比雪夫逼近多项式或在x0处的逼近值:f syms t; T(1:k+1) =t; T(1) = sym('1'); T(2) = t; c(1:k+1) = sym('0');
c(1)=int(subs(y,findsym(sym(y)),sym('t'))*T(1)/sqrt(1-t^2),t,-1,1)/pi; c(2)=2*int(subs(y,findsym(sym(y)),sym('t'))*T(2)/sqrt(1-t^2),t,-1,1)/pi; f = c(1)+c(2)*t;
for i=3:k+1 T(i) = 2*t*T(i-1)-T(i-2); c(i) = 2*int(subs(y,findsym(sym(y)),sym('t'))*T(i)/sqrt(1-t^2),t,-1,1)/2; f = f + c(i)*T(i); f = vpa(f,6);
if(i==k+1) if(nargin == 3) f = subs(f,'t',x0); else f = vpa(f,6); end end end
应用实例:切比雪夫应用实例。用切比雪夫公式(取6项)逼近函数12x,并求当x=0.5时的函数值。 解: 利用程序求解方程,在MATLAB命令窗口中输入: >> Chebyshev('1/(2-x)',6) %调用创建的函数euler,输出切比雪夫多项式的6个项 再在MATLAB命令窗口中输入: >> Chebyshev('1/(2-x)',6,0.5) %调用创建的函数euler,输出当x=0.5时的函数值
输出结果: 流程图:
是
开始 定义sym型变量t以及切比雪夫多项式矩阵T(n),并规定前两项为1,t
根据前两项多项式计算其系数c(1),c(2)
由第一项和第二项多项式及其系数计算一级切比雪夫逼近值
i从3到k+1 否 是 是 否
由T(i-1)和T(i-2)计算T(i)
由T(i)计算其系数c(i)
i=k+1 输入三项 求出逼近式在x0处的值 输出结果,并设置其为六级精度
结束
由T(i)和c(i)计算i级切比雪夫逼近值。 二、拉压杆系的静不定问题。由n根杆(CB1,CB2...CBn
)组成的桁架结构如
图2-1所示,受力P作用,各杆的横截面积分别为Ai
,材料弹性模量为E,长度
为Li,求各杆的轴力Ni
以及节点C处的位移。
图2-1 1、假设:①由P的作用,C点移动到C’点;②C到C’的水平距离为dx,
垂直距离为dy;③各杆与水平面夹角分别为α1,α2…αi…αn
;④每根杆长度的变
化为dL1,dL2…dLi…dLn
;⑤力P与水平面夹角为α。
2、思路: (1)如图2-2所示,以CBi
为例说明各杆的几何关系,由于,
≈0,因此dLi =BiC’-BiC≈BiC’-BiD=DC’,过C点作DC’的平行线CG,因,故,所以CF=dxcosαi,FG=dysinαi,故可得几何方程①。
图2-2 (2)根据图2-3所示各轴力以及外力x,y方向合力为0,建立平衡方程②、③: 图2-3 (3)由公式①、②、③共有n+2个公式,求解n个轴力,以及A点位移dx、dy,建立如下所示的线性方程组:
. . . (4)建立[Pcosα,Psinα,0,0,0…0]’的常数矩阵,以及如下所示的系数矩阵
(5)再用求逆法求解此线性方程组,即用常数矩阵除以系数矩阵,得出结果。 3、源程序:(文件名称为main) clear;clc; Ei=input('请输入各杆的刚度:(注意用[]括起来)'); %输入刚度矩阵Ei Li=input('请输入各杆的长度:(注意用[]括起来) ');%输入杆的长度矩阵Li Ai=input('请输入各杆的横截面积:(注意用[]括起来) ');%输入杆的横截面积矩阵Ai ai=input('请输入各杆与水平面的夹角:(注意用[]括起来) ');%输入杆与水平面的夹角矩阵ai P=input('请输入外力P: ');%输入外加力P a=input('请输入P与水平面的夹角: ')%输入外加力P与x的夹角 n1=length(Ei);n2=length(Li);n3=length(Ai); if(n1~=n2|n2~=n3|n1~=n3) disp('输入数据错误') else n=n1; end%判断数据大小是否一致 Ki=Li./(Ei.*Ai); C=zeros(n+2,1); C(1,1)=P*cos(a); C(2,1)=P*sin(a); C(3:n+2,1)=zeros(n,1);%建立方程组等号右边常数的矩阵 D=zeros(n+2,n+2); D(1,:)=[cos(ai),0,0]; D(2,:)=[sin(ai),0,0]; for(i=1:n) D(i+2,i)=Ki(i); end D(3:n+2,n+1)=(-cos(ai)); D(3:n+2,n+2)=(-sin(ai));%建立方程组系数矩阵 x=D\C;x=x';%求解该线性方程组,得出C点位移以及每根杆的轴力 disp('节点在x、y方向上的位移分别:') x(n+1:n+2) disp('各杆的轴力分别为:') x(1:n)%输出结果
4、流程图:
是 否 开始
输入所需数据:各杆的刚度Ei、横截面积Ai、长度Li,以及夹角αi,外加力P以及其与x方向夹角
建立系数矩阵D,以及常数矩阵C
用求逆法解线性微分方程
输出C点位移,以及各杆轴力
输入Ei,Ai,Li,αi维度是否一致
输出:输入数据错误
结束 5、程序举例应用: 设三根杆组成的支架如图2-4所示,挂一重物P=3000N。设L=3m,各杆的横
截面积分别为:A1=15010-6m2,A2=20010-6m2,A3=30010-6m2,材料的弹性模量均
为E=200109N/m2,求各杆所受力的大小以及C点位移
解:①运行main文件(即前文中写的源程序); ②输入题中所给数据; [200e9,200e9,200e9]; [3/sin(pi/3),3/sin(pi/2),3/sin(pi/4)]; [150e-6,200e-6,300e-6]; [pi/3,pi/2,3*pi/4]; 3000; 0;
③得出结果;
图2-5 (1); 一、流程图:
若不成立 修改 建立函数文件
输入MATLAB指令
结果 二、源程序代码: 建立被积函数文件funo funo.m function f=funo(x) f=(1./((2*pi).^0.5)).*exp(-x.^2./2); 计算积分,在MATLAB命令窗中输入: >> quad('funo',0,1) 三、结果: ans = 0.3413