振动力学-习题-推荐下载
《振动力学》习题集(含答案)【精选】精心总结

令 引起的静变形为 ,则有:
,即
令 + 引起的静变形为 ,同理有:
得:
则系统的自由振动可表示为:
其中系统的固有频率为:
注意到 与 方向相反,得系统的自由振动为:
1.9质量为m、长为l的均质杆和弹簧k及阻尼器c构成振动系统,如图E1.9所示。以杆偏角 为广义坐标,建立系统的动力学方程,给出存在自由振动的条件。若在弹簧原长处立即释手,问杆的最大振幅是多少?发生在何时?最大角速度是多少?发生在何时?是否在过静平衡位置时?
解:
(1)保持水平位置:
(2)微幅转动:
故:
2.10求图T 2-10所示系统的固有频率,刚性杆的质量忽略不计。
图T 2-10答案图T 2-10
解:
m的位置:
, ,
,
,
2.11图T 2-11所示是一个倒置的摆。摆球质量为m,刚杆质量可忽略,每个弹簧的刚度为 。
(1)求倒摆作微幅振动时的固有频率;
(2)摆球质量m为0.9 kg时,测得频率 为1.5 Hz,m为1.8 kg时,测得频率为0.75 Hz,问摆球质量为多少千克时恰使系统处于不稳定平衡状态?
图E1.2
解:
如图,令 为柱体的转角,则系统的动能和势能分别为:
利用 和 可得:
1.3转动惯量为J的圆盘由三段抗扭刚度分别为 , 和 的轴约束,如图E1.3所示。求系统的固有频率。
图E1.3
解:
系统的动能为:
和 相当于串联,则有:
以上两式联立可得:
系统的势能为:
利用 和 可得:
1.4在图E1.4所示的系统中,已知 ,横杆质量不计。求固有频率。
图E1.4答案图E1.4
解:
对m进行受力分析可得:
《振动力学》习题集(含答案)(完整资料).doc

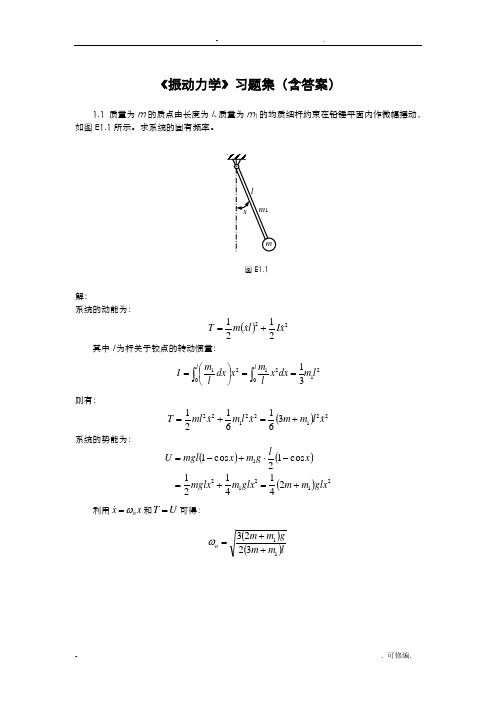
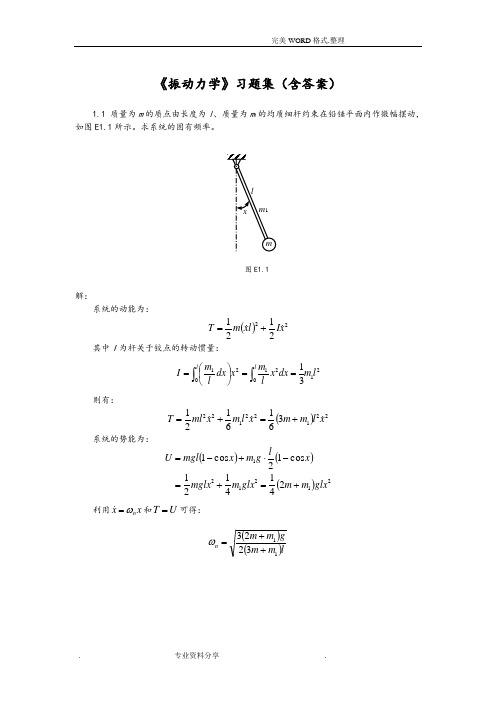
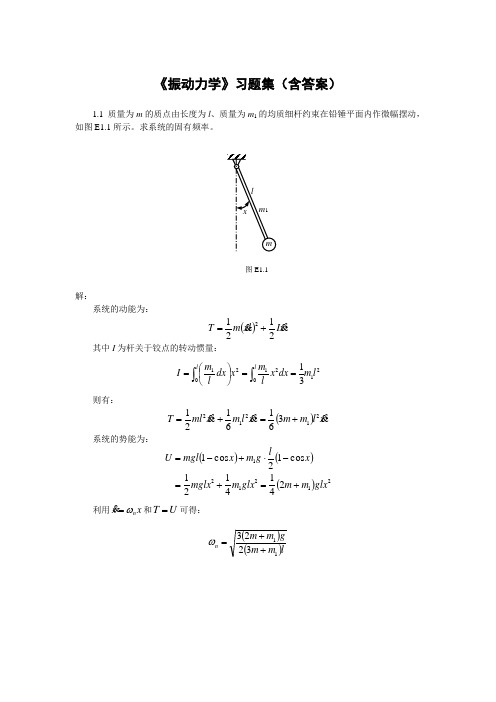
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动习题答案

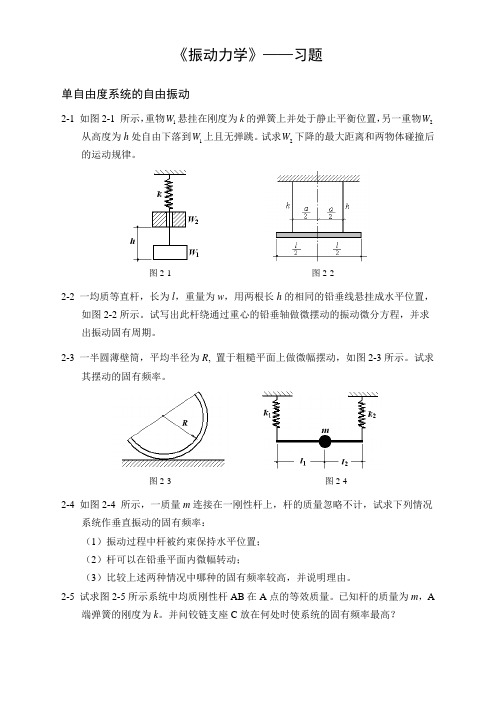
《振动力学》——习题第二章 单自由度系统的自由振动2-1 如图2-1 所示,重物1W 悬挂在刚度为k 的弹簧上并处于静止平衡位置,另一重物2W 从高度为h 处自由下落到1W 上且无弹跳。
试求2W 下降的最大距离和两物体碰撞后的运动规律。
解:222221v gW h W =,gh v 22=动量守恒:122122v gW W v g W +=,gh W W W v 221212+=平衡位置:11kx W =,kW x 11=1221kx W W =+,kW W x 2112+=故:kW x x x 21120=-= ()2121W W kgg W W k n +=+=ω故:tv t x tx t x x n nn n nn ωωωωωωsin cos sin cos 12000+-=+-=&xx 0x 1x 12平衡位置2-2 一均质等直杆,长为l ,重量为w ,用两根长h 的相同的铅垂线悬挂成水平位置,如图2-2所示。
试写出此杆绕通过重心的铅垂轴做微摆动的振动微分方程,并求出振动固有周期。
解:给杆一个微转角θ2aθ=h α2F =mg由动量矩定理:ah a mg a mg Fa M ml I MI 822cos sin 12122-=-≈⋅-====αθαθ&&其中12cossin ≈≈θααh l ga p ha mg ml n 22222304121==⋅+θθ&& g h a l ga h l p T n 3π23π2π222===2-3 一半圆薄壁筒,平均半径为R , 置于粗糙平面上做微幅摆动,如图2-3所示。
试求其摆动的固有频率。
图2-3 图2-42-4 如图2-4 所示,一质量m连接在一刚性杆上,杆的质量忽略不计,试求下列情况系统作垂直振动的固有频率:(1)振动过程中杆被约束保持水平位置;(2)杆可以在铅垂平面内微幅转动;(3)比较上述两种情况中哪种的固有频率较高,并说明理由。
《振动力学》作业资料(含答案解析)

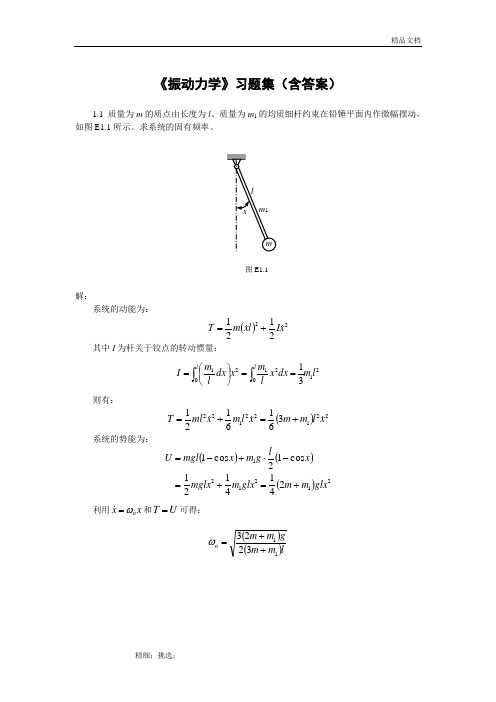
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得:()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得:()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222121212121θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动力学习题集含答案

解:
,
动量守恒:
,
平衡位置:
,
,
故:
故:
2.4在图E2.4所示系统中,已知m, , , 和 ,初始时物块静止且两弹簧均为原长。求物块运动规律。
图E2.4答案图E2.4
解:
取坐标轴 和 ,对连接点A列平衡方程:
即:
(1)
对m列运动微分方程:
即:
(2)
由(1),(2)消去 得:
图E2.7
解:
,
s=1时共振,振幅为:
(1)
远离共振点时,振幅为:
(2)
由(2)
由(1)
, ,
故:
2.7求图T 2-7中系统的固有频率,悬臂梁端点的刚度分别是 及 ,悬臂梁的质量忽略不计。
图T 2-7答案图T 2-7
解:
和 为串联,等效刚度为: 。(因为总变形为求和)
和 为并联(因为 的变形等于 的变形),则:
图E1.9答案图E1.9
解:
利用动量矩定理得:
,
,
,
,
1.12面积为S、质量为m的薄板连接于弹簧下端,在粘性流体中振动,如图E1.12所示。作用于薄板的阻尼力为 ,2S为薄板总面积,v为速度。若测得薄板无阻尼自由振动的周期为 ,在粘性流体中自由振动的周期为 。求系数 。
图E1.12
解:
平面在液体中上下振动时:
和 为串联(因为总变形为求和),故:
故:
2.9如图T 2-9所示,一质量m连接在一刚性杆上,杆的质量忽略不计,求下列情况系统作垂直振动的固有频率:
(1)振动过程中杆被约束保持水平位置;
(2)杆可以在铅锤平面内微幅转动;
(3)比较上述两种情况中哪种的固有频率较高,并说明理由。
振动力学习题集含答案

解:
利用动量矩定理得:
,
,
,
,
面积为S、质量为m的薄板连接于弹簧下端,在粘性流体中振动,如图所示。作用于薄板的阻尼力为 ,2S为薄板总面积,v为速度。若测得薄板无阻尼自由振动的周期为 ,在粘性流体中自由振动的周期为 。求系数 。
图
解:
平面在液体中上下振动时:
,
,
图所示系统中,已知m,c, , , 和 。求系统动力学方程和稳态响应。
(2)
若取下面为平衡位置,求解如下:
,
图T 2-17所示的系统中,四个弹簧均未受力,k1=k2=k3=k4=k,试问:
(1)若将支承缓慢撤去,质量块将下落多少距离?
(2)若将支承突然撤去,质量块又将下落多少距离?
图T 2-17
解:
(1) ,
(2) ,
如图T 2-19所示,质量为m2的均质圆盘在水平面上可作无滑动的滚动,鼓轮绕轴的转动惯量为I,忽略绳子的弹性、质量及各轴承间的摩擦力,求此系统的固有频率。
因此有:
图所示阶梯杆系统中已知m,ρ,S,E和k。求纵向振动的频率方程。
图
解:
模态函数的一般形式为:
题设边界条件为:
,
边界条件可化作:
,
导出C2= 0及频率方程:
,其中
长为l、密度为ρ、抗扭刚度为GIp的的等直圆轴一端有转动惯量为J的圆盘,另一端连接抗扭刚度为k的弹簧,如图所示。求系统扭振的频率方程。
《振动力学》习题集(含答案)
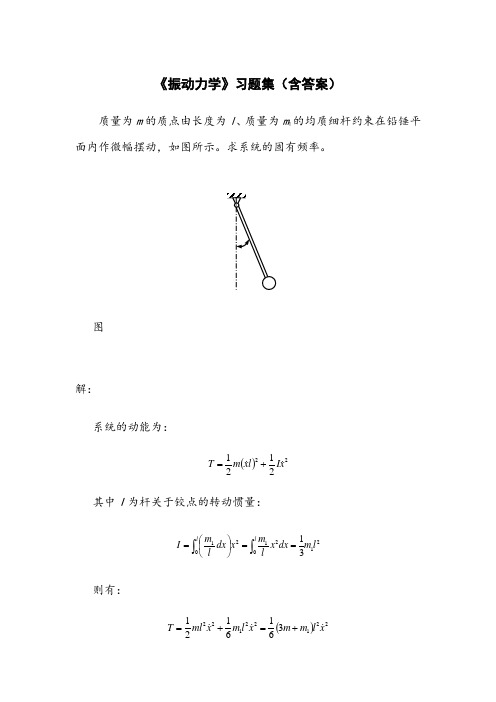
质量为m的质点由长度为l、质量为m1的均质细杆约束在铅锤平面内作微幅摆动,如图所示。求系统的固有频率。
图
解:
系统的动能为:
其中I为杆关于铰点的转动惯量:
(完整版)振动力学试题

1.转动惯量为J 的圆盘由三段抗扭刚度分别为1k 、2k 和3k 的轴约束,如图所示。
求系统的固有频率。
解:系统的动能为 221•=θJ T2k 和3k 相当于串联,则 32θθθ+= 3322θθk k =联立以上两式得 θθ3232k k k +=θθ3223k k k +=系统的势能为 ()[]223322221323232121212121θθθθk k k k k k k k k k U +++=++=利用θωθn =•和U T =可得 ()()3232132n k k J k k k k k +++=ω2.面积为S ,质量为m 的薄板连接于弹簧下端,在粘性流体中振动,如图所示。
作用于薄板的阻尼力为νμS F d 2=,S 2为薄板总面积,ν为速度。
若测得薄板无阻尼自由振动的周期为0T ,在粘性流体中自由振动的周期为d T 。
求系数μ。
解:平面在液体中上下振动时:02=++•••kx x S x m μ dn d n T T m k πξωωπω2-1,220====kS m S m S n n 222,22μξωμξξωμ==⇒= kS k 222--1μξ=2020220-2-22T T T ST mk S k T T T T d dd πμμ=⇒=3.如图所示均匀刚性杆质量为1m ,求系统的频率方程。
解:先求刚度矩阵。
令0x 1,==θ得:22212111a k b k a a k b b k k +=⋅+⋅=b k 221-k =令1,0==x θ得:a k k 212-=222-k k =则刚度矩阵为:⎥⎦⎤⎢⎣⎡+=2222221--k ak a k a k b k K再求质量矩阵。
令0,1==••••x θ ,得:0,31212111==m a m m令1,0==••••x θ,得:22212,0m m m ==则质量矩阵为: ⎥⎥⎦⎤⎢⎢⎣⎡=2210031m a m M故频率方程为: 0-2=M K ω4.在图所示系统中,已知m 和k 。
振动力学习题集含答案
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+= 系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
《振动力学》作业资料(含答案解析)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得:()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得:()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222121212121θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
《振动力学》习题集[含答案]
![《振动力学》习题集[含答案]](https://img.taocdn.com/s3/m/bf1e364afad6195f302ba63b.png)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得:()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得:()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222121212121θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动理论-习题
《振动力学》——习题单自由度系统的自由振动2-1 如图2-1 所示,重物1W 悬挂在刚度为k 的弹簧上并处于静止平衡位置,另一重物2W 从高度为h 处自由下落到1W 上且无弹跳。
试求2W 下降的最大距离和两物体碰撞后 的运动规律。
图2-1 图2-2 2-2 一均质等直杆,长为l ,重量为w ,用两根长h 的相同的铅垂线悬挂成水平位置, 如图2-2所示。
试写出此杆绕通过重心的铅垂轴做微摆动的振动微分方程,并求 出振动固有周期。
2-3 一半圆薄壁筒,平均半径为R , 置于粗糙平面上做微幅摆动,如图2-3所示。
试求 其摆动的固有频率。
图2-3 图2-4 2-4 如图2-4 所示,一质量m 连接在一刚性杆上,杆的质量忽略不计,试求下列情况 系统作垂直振动的固有频率:(1)振动过程中杆被约束保持水平位置;(2)杆可以在铅垂平面内微幅转动;(3)比较上述两种情况中哪种的固有频率较高,并说明理由。
2-5 试求图2-5所示系统中均质刚性杆AB 在A 点的等效质量。
已知杆的质量为m ,A 端弹簧的刚度为k 。
并问铰链支座C 放在何处时使系统的固有频率最高?图2-5 图2-6 2-6 在图2-6所示的系统中,四个弹簧均未受力。
已知m =50kg ,19800N m k =,234900N m k k ==,419600N m k =。
试问:(1)若将支撑缓慢撤去,质量块将下落多少距离?(2)若将支撑突然撤去,质量块又将下落多少距离?2-7 图2-7所示系统,质量为m 2的均质圆盘在水平面上作无滑动的滚动,鼓轮绕轴的转动惯量为I ,忽略绳子的弹性、质量及各轴承间的摩擦力。
试求此系统的固有频 率。
图2-72-8 如图2-8所示的系统中,钢杆质量不计,建立系统的运动微分方程,并求临界阻尼系数及阻尼固有频率。
图2-8 图2-9 2-9 图2-9所示的系统中,m =1kg ,k =224N/m ,c =48N.s/m ,l 1=l =0.49m ,l 2=l /2,l 3=l /4,不计钢杆质量。
《振动力学》习题集(含答案)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动力学习题集
《振动力学》习题集(含答案)质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图所示。
求系统的固有频率。
图解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图所示。
求系统的固有频率。
图解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn = 和U T =可得:()mkR a R mR a R k n 343422+=+=ω转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图所示。
求系统的固有频率。
图解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222121212121θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn = 和U T =可得:()()3232132k k J k k k k k n +++=ω在图所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动力学试题

1、质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅垂平面内作微幅摆动,如图所示。
求系统的固有频率。
2、质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图所示。
求系统的固有频率。
3、图T 2-11所示是一个倒置的摆。
摆球质量为m ,刚杆质量可忽略,每个弹簧的刚度为2k。
求倒摆作微幅振动时的固有频率。
4、转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图所示。
求系统的固有频率。
5、在图所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
求固有频率。
6、如图所示,刚性曲臂绕支点的转动惯量为I 0,求系统的固有频率。
mg baa F +=2 x x 27、求图T 2-10所示系统的固有频率,刚性杆的质量忽略不计。
8、求图中系统的固有频率,悬臂梁端点的刚度分别是1k 及3k ,悬臂梁的质量忽略不计。
9、一种位移计的结构如图2-7所示。
质量块重W ,摇臂AB 绕支点O 的转动惯量为I,x 1x A两个弹簧的刚度为1k 及2k ,求系统的固有频率。
cbB O Wk 1k 2A10、用近似估算的方法(瑞利法)计算图所示系统的基频。
11、如图所示,重物1W 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物2W 从高度为h 处自由下落到1W 上而无弹跳。
求2W 下降的最大距离和两物体碰撞后的运动规律。
12、图所示的系统中,四个弹簧均未受力,k 1= k 2= k 3= k 4= k ,试问:(1)若将支承缓慢撤去,质量块将下落多少距离? (2)若将支承突然撤去,质量块又将下落多少距离?khW 2W 113、质量1m 在倾角为α的光滑斜面上从高h 处滑下无反弹碰撞质量2m ,如图所示。
确定系统由此产生的自由振动。
14、一长度为l 、质量为m 的均匀刚性杆铰接于O 点并以弹簧和粘性阻尼器支承,如图T 2-24所示。
《振动力学》习题集(含答案解析)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
《振动力学》习题集(含标准答案)

《振动力学》习题集(含答案)————————————————————————————————作者:————————————————————————————————日期:《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T &&+=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T &&&+=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω=&和U T =可得: ()()lm m gm m n 113223++=ωml m 1 x1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ&&&mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn =&和U T =可得: ()mkR a R mR a R k n 343422+=+=ωkk A Ca R θ1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ&J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn =&和U T =可得: ()()3232132k k J k k k k k n +++=ωkk 2 kJ1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
《振动力学》习题集(含答案)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《振动力学》——习题
第二章 单自由度系统的自由振动
2-1 如图2-1 所示,重物悬挂在刚度为k 的弹簧上并处于静止平衡位置,另一重物
1W 2
W 从高度为h 处自由下落到上且无弹跳。
试求下降的最大距离和两物体碰撞
1W 2W 后
的运动规律。
图2-1
图2-2
2-2 一均质等直杆,长为l ,重量为w ,用两根长h 的相同的铅垂线悬挂成水平位置,
如图2-2所示。
试写出此杆绕通过重心的铅垂轴做微摆动的振动微分方程,并求
出振动固有周期。
2-3 一半圆薄壁筒,平均半径为R , 置于粗糙平面上做微幅摆动,如图2-3所示。
试求
其摆动的固有频率。
图2-3
图2-4
2-4 如图2-4 所示,一质量m 连接在一刚性杆上,杆的质量忽略不计,试求下列情况
系统作垂直振动的固有频率:
(1)振动过程中杆被约束保持水平位置;
(2)杆可以在铅垂平面内微幅转动;
(3)比较上述两种情况中哪种的固有频率较高,并说明理由。
2-5
试求图2-5所示系统中均质刚性杆AB 在A 点的等效质量。
已知杆的质量为
m ,A
图2-5 图2-6
k=
所示的系统中,四个弹簧均未受力。
已知m=50kg,9800
图2-7
图2-8 图2-9
图2-9所示的系统中,
图3-1 图3-2
图3-2所示系统中,刚性杆AB的质量忽略不计,B端作用有激振力
图3-3
450kg,支撑在弹簧隔振器上,弹簧静变形为
图3-6 图3-7
图3-8
图3-9
图3-10
第四章 多单自由度系统的振动
4-1 图4-1所示系统中,各个质量只能沿铅垂方向运动,假设,
123m m m m ===。
试求系统的固有频率及振型矩阵。
123456k k k k k k k ======
图4-1
图4-2
4-2 试计算图4-2所示系统对初始条件和的响应。
[]00000T
x =[]000T
x
v v = 4-3 试确定题4-2的系统对作用于质量m 1和质量m 4上的阶跃力的响应。
14p p p ==4-4
如图4-4所示,已知机器质量为,吸振器质量为,若机器上
1=90kg m 2=2.25kg m 有
一偏心质量,偏心距e =1cm ,机器转速n =1800r/m 。
试问:
m 0.5kg '=
(1)吸振器的弹簧刚度k 2多大,才能使机器振幅为零?
(2)此时吸振器的振幅B 2为多大?
(3)若使吸振器的振幅B 2不超过2mm ,应如何改变吸振器的参数?
图4-4。