一级倒立摆地Simulink仿真
直线一级倒立摆的自动起摆与稳摆控制

直线一级倒立摆的自动起摆与稳摆控制(Simulink仿真)通过对倒立摆系统的力学及运动学分析,建立系统的非线性数学模型为可见,直线一级倒立摆为单输入双输出系统,利用Simulink可建立上式的框图模型,如图1所示。
图1 直线一级倒立摆系统的非线性Simulink模型倒立摆的起摆问题,是控制理论中的一个经典实验,其实质是倒立摆系统从一个稳定的平衡状态(垂直向下)在外力的作用下自动转移到另一个平衡状态(垂直向上)。
在这个过程中,要求起摆快速,但又不能过于超调。
由于输入、输出之间的非线性,许多常用的线性控制理论都不适用。
基于非线性理论,目前常用的几种起摆方法为:Bang-Bang控制、能量控制、仿人智能控制等。
这里采用Bang-Bang控制作为起摆方法,LQR控制作为稳摆方法,Simulink框图如图2所示。
图2 倒立摆自动起摆控制Simulink框图(Bang-Bang + LQR)图2中,子系统“Inverted Pendulum”是直线一级倒立摆的非线性模型,如图1所示;S函数“ang_proc”模块用于摆杆角度的处理,即将任意角度信号转换为“ -π ~ π”之间的对应值;子系统“Bang-Bang Controller”为Bang-Bang控制器;子系统“LQR Controller”为LQR 控制器。
双击“Bang-Bang Controller”模块可打开Bang-Bang控制器框图如下:图3 Bang-Bang控制器框图图3中,bang_controller是为实现Bang-Bang控制算法而编写的S函数,信号Ang_s是Bang-Bang控制切换角,F_bang是Bang-Bang控制作用力。
双击“LQR Controller”子系统,打开LQR控制器框图如下:图4 LQR控制器框图运行图2中的仿真框图,则基于Bang-Bang控制和LQR控制算法的直线一级倒立摆自动起摆控制效果如图5所示。
基于Matlab的一级倒立摆模型的仿真
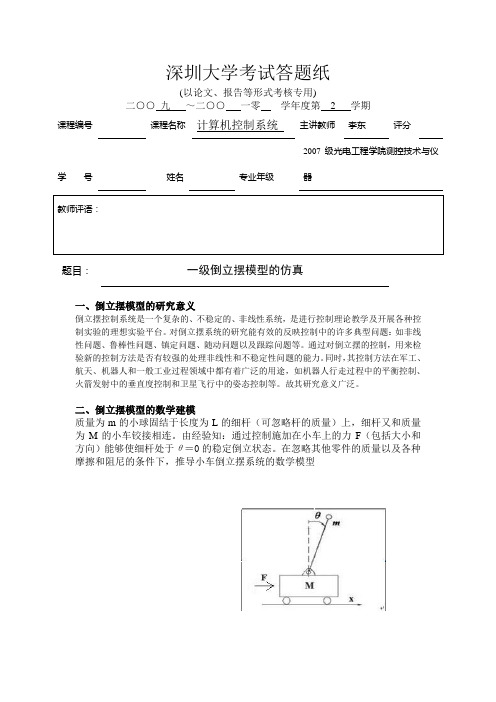
基于Matlab的一级倒立摆模型的仿真一.倒立摆模型的研究意义倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想的实验平台。
对倒立摆系统的研究能有效的反应控制中的典型问题:如非线性问题、鲁莽性问题、镇定问题等。
通过对倒立摆的控制,用来检测新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
二.倒立摆模型的数学建模质量为m的小球固结于长度为L的细杆上(细杆质量不计),细杆和质量为M的小车铰链相接分析过程如下:如图所示,设细杆摆沿顺时针方向转东伟正方向,水平向右为水平方向上的正方向。
当细杆白顺时针想要运动时水平方向施加的里应该是水平相应。
对方程组进行拉普拉斯变化,得到摆杆角度和小车位移的传递函数:摆杆角度和小车加速度之间的传递函数:摆杆角度和小车加速度之间的传递函数:位移X对外力F的传递函数:三.在Matlab中输入得到的反馈矩阵:采用MATLAB/Simulink构造单级倒立摆状态反馈控制系统的仿真模型,如下图所示。
首先,在M A T L A B的Command Window中输入各个矩阵的值,并且在模型中的积分器中设置非零初值(这里我们设置为[0 0 0.1 0]。
然后运行仿真程序。
得到的仿真曲线从仿真结果可以看出,可以将倒立摆的杆子与竖直方向的偏角控制在θ=0(即小球和杆子被控制保持在竖直倒立状态),另外说明下黄线代表位移,紫线代表角度。
四.总结由实验中可知,倒立摆系统是一个非线性的较复杂的不稳定系统,故要满足故要满足稳定性要求,就得对系统进行线性化近似和稳定控制。
当然我们调节出来的只是一个理想模型,在实际中会更加复杂,稳定性也会更难获得。
在这次实验中掌握了倒立摆仿真的整个过程,熟悉了MATLAB仿真软件Simulingk的使用,也对系统有了更好的理解。
(完整word版)一级倒立摆的Simulink仿真

单级倒立摆稳定控制直线-级倒立摆系统在忽略了空'(阻力及各种摩擦Z后,町抽象成小车和匀质摆杆组成的系统,如图1所示。
图2控制系统结构假设小车质量M=0.5kg,匀质摆朴质量m=0.2kg,摆朴长度21 =0.6m, x(t)为小车的水半位移,〃为摆杆的角位移,g = 9.8m/s2o控制的目标是通过外力u⑴使得摆直立向上(即&(t) = 0) o该系统的非线性模型为:(J +inl‘)典(nilcos^)&= niglsin^ (ml cos。
)翼(M其中J二一ml+ m)&= (mlsin0)6^ + u一、非线性模型线性化及建立状态空间模型因为在工作点附近(& = 0.必0)对系统进行线竹:•化,所以可以做如下线性化处理: 03 Q1sin0« 0 --------- 、COS&Q 1-----------------3! 2!当e很小时,由COS0V sine的幕级数展开式可知,忽略高次项后, 可得cos0~l, sin0=0, 0Z 2=0:因此模型线性化后如下:(J+nil A2)0r z +mlx z z =mgl0 (a)取系统的状态变量为% = x,x2 =仪X3 = x4=灰输出y = [x OF包扌舌小车位移和摆杆的角位移.由线性化后运动方程组得故空间状态方程如下:■010 0 ■「xT■ ■x2*00-2.6727 0x21 1.8182 x3f =000 1x3+0_x4J|_x40031.1818 0-4.5455uml0f r + (M+m) x''二u (b) 其中J = -ml3■ ■ xl ■ ■Xx2x1 x30 x4&Y=xlx3X1/二x'=x2—沁—册4(M + m) 一3m44(M + m) - 3m u3(M +m)g4(M + m)l 一3ni-34(M + m)l 一311119 1 00 ''xlM00 -3mg0am xl x2‘ _4(M + m) 一3m x2 x3* ~00 01x3x4J00 3(M + m)g0[_x44(M + m)l - 3ml 044(M + m) - 3m 0一34(M + m)l - 3nil二. 通过Matlab 仿真判断系统的可控与可观性,并说明其物理意义。
一级倒立摆系统仿真及分析
一级倒立摆系统仿真及分析1.摘要本次课程设计,我们小组选择一级倒立摆系统作为物理模型,首先通过物理分析建立数学模型,得到系统的传递函数,通过对传递函数的极点,根轨迹,单位阶跃响应来分析系统稳定性。
建立状态空间模型,利用matlab进行能控能观性分析,输入阶跃信号,分析系统输出响应。
通过设定初始条件,查看系统稳定性,利用simulink绘制系统状态图。
再对系统进行极点配置,进行状态反馈,使得系统在初始状态下处于稳定状态,并绘制系统状态图。
2.课程设计目的倒立摆系统是一个经典的快速、多变量、非线性、绝对不稳定系统,是用来检验某种控制理论或方法的典型方案。
倒立摆控制理论产生的方法和技术在半导体及精密仪器加工、机器人技术、导弹拦截控制系统和航空器对接控制技术等方面具有广阔的开发利用前景。
因此研究倒立摆系统具有重要的实践意义。
3.课程设计题目描述和要求本次课程设计我们小组选择环节项目三:系统状态响应、输出响应的测量。
环节目的:1.利用MATLAB分析线性定常系统。
2.利用SIMULINK进行系统状态空间控制模型仿真,求取系统的状态响应及输出响应。
环节内容、方法:1.给定系统状态空间方程,对系统进行可控性、可观性分析。
并利用SIMULINK 绘制系统的状态图,求取给定系统输入信号和初始状态时的状态响应及输出响应。
2.给定两个系统的状态空间模型,分别求两个系统的特征值;将两个系统的系统矩阵化为标准型;求出给定系统初始状态时,状态的零输入响应;求两个系统的传递函数并分析仿真结果。
4.课程设计报告内容4.1 数学模型的建立及分析对于倒立摆系统,由于其本身是自不稳定的系统,实验建模存在一定的困难。
但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程。
下面我们采用其中的牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型。
在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图1所示图l 直线一级倒立摆系统我们不妨做以下假设:M小车质量、m摆杆质量、b小车摩擦系数、l摆杆转动轴心到杆质心的长度、I 摆杆惯、F加在小车上的力、x 小车位置、φ摆杆与垂直向上方向的夹角、θ摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)。
倒立摆控制系统的Simulink仿真
倒立摆控制系统的Simulink 仿真本文针对一个倒立摆系统进行了系统的建模、求解、控制系统的设计,并且使用Simulink 对控制算法进行了仿真。
一、模型的描述倒立摆系统如图(1),设有一个倒立摆装在只能沿x 轴方向移动的小车上,图中1m 为小车的质量,2m 为摆球的质量,g 为重力加速度,l 为摆长,J 为摆的转动惯量。
当小车受到外力()f t 的作用时,小车产生位移()x t ,且摆产生角位移()t θ。
二、模型的建立下面针对该倒立摆系统进行建模求解。
当小车1m 在外力作用下产生位移()x t 时,摆球受力情况如图(2)所示。
图中2m g 为摆球2m 所受重力,222()d x t m dt 为x 方向的惯性力,2sin ()m g t θ为垂直于摆杆方向的重力分量。
在x 方向上,小车的惯性力矩为212()d x t m dt ,摆球产生的位移量为()sin ()x t l t θ+;在垂直于摆杆的方向上,摆球的转动惯性力为22()d t J dt θ;222()d x t m dt的分力为222()cos ()d x t m t dt θ。
图(1)装有倒立摆的小车 图(2)倒立摆受力图根据牛顿运动定律,按照力的平衡原理,可以分别列出该系统在x 方向上和垂直于摆杆方向上的的运动方程222122222()()[sin ()]()d x t d x t d l t m m m f t dt dt dt θ++=(1) 222222()()cos ()sin ()d t d x t J m l t m lg t dt dtθθθ+= (2) 三、模型的求解3.1微分方程组的求解联立式(1)、(2),经过方程组的恒等变形得2222222122222()()2[()cos ()]sin 2()2sin ()()2()d x t d t m m J m l t m l g t Jm l t dt dtJf t θθθθ+-=-++ (3) 2222222212221222()()[cos ()()]sin ()cos ()()()sin ()()d t d t m l t m m J m l t t dt dtm m m lg t m lf t θθθθθθ-+=-++ (4) 由式(3)、(4)令''121343()(),(),()(),()()x t t x x t x t x t x t x t θ====,可建立如下的微分方程组进行求解'12'2222221222222122'34'222422222122()()1()()(sin ()cos ()()()sin ()cos ()()())()()1()()(sin 2()2sin ()()2())2[()cos ()]x t x t d t x t x m l t t m m m lg t m l t m m J dt m lf t x t x t d t x t m l g t Jm l t Jf t m m J m l t dt θθθθθθθθθ⎧=⎪⎪=-+⎪-+⎪+⎨==-+++-⎪⎪⎪⎪⎩3.2控制系统的分析与设计在该模型中,对该倒立摆系统实施角度环、速度换的控制,并假设小车在运行过程中受到空气阻力,阻力大小与小车的速度成正比。
一阶直线倒立摆双闭环PID控制仿真报告

目录摘要 (2)一、一阶倒立摆系统建模 (3)1、对象模型 (3)2、电动机、驱动器及机械传动装置的模型 (4)二、双闭环PID控制器设计 (5)1、仿真验证 (6)2、内环控制器的设计 (9)3、系统外环控制器设计 (12)三、仿真实验 (15)1、绘图子程序 (15)2、仿真结果 (16)四、结论 (18)摘要本报告旨在借助Matlab 仿真软件,设计基于双闭环PID 控制的一阶倒立摆控制系统。
在如图0.1所示的“一阶倒立摆控制系统”中,通过检测小车的位置与摆杆的摆动角,来适当控制驱动电动机拖动力的大小,控制器由一台工业控制计算机(IPC )完成。
图0.1 一阶倒立摆控制系统分析工作原理,可以得出一阶倒立摆系统原理方框图:图0.2 一阶倒立摆控制系统动态结构图本报告将借助于“Simulink 封装技术——子系统”,在模型验证的基础上,采用双闭环PID 控制方案,实现倒立摆位置伺服控制的数字仿真实验。
一、一阶倒立摆系统建模1、对象模型如图1.1所示,设小车的质量为m 0,倒立摆均匀杆的质量为m ,摆长为2l ,摆的偏角为θ,小车的位移为x ,作用在小车上的水平方向的力为F ,O 1为摆角质心。
θxyOFF xF x F yF yllxO 1图1.1 一阶倒立摆的物理模型根据刚体绕定轴转动的动力学微分方程,转动惯量与角加速度乘积等于作用于刚体主动力对该轴力矩的代数和,则 1)摆杆绕其中心的转动方程为θθθcos sin y l F l F J x-= (1-1) 2)摆杆重心的水平运动可描述为)sin (22x θl x dtd m F += (1-2)3)摆杆重心在垂直方向上的运动可描述为)cos (22y θl dtd m mg F =- (1-3)4)小车水平方向上的运动可描述为220dtxd m F F x =- (1-4)由式(1-2)和式(1-4)得F ml x m m =⋅-⋅++)sin (cos )(20θθθθ (1-5) 由式(1-1)、(式1-2)和式(1-3)得θθθsin g cos 2ml x ml ml J =⋅++ )( (1-6) 整理式(1-5)和式(1-6),得⎪⎪⎩⎪⎪⎨⎧++-+-⋅+⋅=-++-⋅+++=))((cos sin )(cos sin cos cos ))((cos sin sin )()(x 2022202222220222222m l J m m l m m l m m l m F m l l m m m m l J g l m m l J lm F m l J θθθθθθθθθθθθ(1-7) 以上式1-7为一阶倒立摆精确模型。
基于Matlab的一级倒立摆模型的仿真
-s2 s4+-20 .58 s2 Transfer Fcn
Pulse Generator
由于未加进控制环节,故系统输出发散
2、加进控制环节,实现时域的稳定控制
0 Constant
-K Gain
1 Gain 1
1 s
Integrator
-40 Gain 3
du /dt Derivative
二、倒立摆模型的数学建模 质量为 m 的小球固结于长度为 L 的细杆(可忽略杆的质量)上,细杆又和质量 为 M 的小车铰接相连。由经验知:通过控制施加在小车上的力 F(包括大小和 方向)能够使细杆处于θ=0 的稳定倒立状态。在忽略其他零件的质量以及各种 摩擦和阻尼的条件下,推导小车倒立摆系统的数学模型
甲方(用人单位): 名称: 法定代表人: 地址: 经济类型: 联系电话:
乙方(职工): 姓名: 身份证号码: 现住址:
联系电话:
根据(中华人民共和国劳动法》和国家及省的有关规定,甲乙双方按照平等自愿、协商一致的原则订立
本合同。
一、合同期限
(一)合同期限
双方同意按以下第
种方式确定本合同期限:
1、有固定期限:从
(a)
=m(x’+lcosθθ’)’
= mx’’+mlcosθθ’’-mlsinθ(θ’)^2
(b)
由(a)、(b)两式得 F= (M+m)x’’ +mlcosθθ’’-mlsinθ(θ’)^2
<1>
小球垂直方向上位移为 lcosθ
故受力为
F’cosθ -mg=m(lcosθ)’’
=-mlθ’’sinθ-mlcosθ(θ’)^2
天,每周至少休息一天。 2、不定时工作制,即经劳动保障部门审批,乙方所在岗位实行不定时工作制。 3、综合计算工时工作制,即经劳动保障部门审批,乙方所在岗位实行以 为周期,总工时 小 时的综合计算工时工作制。 (二)甲方因生产(工作)需要,经与工会和乙方协商后可以延长工作时间。除(劳动法)第四十二条规定 的情形外,一般每日不得超过一小时,因特殊原因最长每日不得超过三小时,每月不得超过三十六小时。 四,工资待遇 (一)乙方正常工作时间的工资按下列第( )种形式执行,不得低于当地最低工资标准。 1、乙方试用期工资 元/月;试用期满工资
一级倒立摆的Simulink仿真
一级倒立摆的Simulink仿真第一篇:一级倒立摆的Simulink仿真单级倒立摆稳定控制直线一级倒立摆系统在忽略了空气阻力及各种摩擦之后,可抽象成小车和匀质摆杆组成的系统,如图1所示。
杆长为2λmguθ图1 直线一级倒立摆系统图2 控制系统结构假设小车质量M =0.5kg,匀质摆杆质量m=0.2kg,摆杆长度2l =0.6m,x(t)为小车的水平位移,θ为摆杆的角位移,g=9.8m/s2。
控制的目标是通过外力u(t)使得摆直立向上(即θ(t)=0)。
该系统的非线性模型为:&&+(mlcosθ)&12&=mglsinθ(J+ml2)θxJ=ml。
,其中2&&&3&=(mlsinθ)θ+u(mlcosθ)θ+(M+m)&x解:一、非线性模型线性化及建立状态空间模型&=0)对系统进行线性化,所以因为在工作点附近(θ=0,θsinθ≈θ-θ33!可以做如下线性化处理:,cosθ≈1-θ22!当θ很小时,由cosθ、sinθ的幂级数展开式可知,忽略高次项后,可得cosθ≈1,sinθ≈θ,θ’^2≈0;因此模型线性化后如下:(J+ml^2)θ’’+mlx’’=mglθ(a)mlθ’’+(M+m)x’’=u(b)其中J=ml13&,输出y=[x&,x3=θ,x4=θ取系统的状态变量为x1=x,x2=x的角位移.θ]T包括小车位移和摆杆⎡x1⎤⎡x⎤⎢x2⎥⎢x'⎥⎡x⎤⎡x1⎤即X=⎢⎥=⎢⎥ Y=⎢⎥=⎢⎥⎢x3⎥⎢θ⎥⎣θ⎦⎣x3⎦⎢⎥⎢⎥⎣x4⎦⎣θ'⎦由线性化后运动方程组得-3mg4X1’=x’=x2 x2’=x’’=x3+u4(M+m)-3m4(M+m)-3m3(M+m)g-3X3’ =θ’=x4 x4’=θ’’=x3+u4(M+m)l-3ml4(M+m)l-3ml故空间状态方程如下:⎡0⎢⎡x1'⎤⎢0⎢x2'⎥⎢X’=⎢⎥=⎢⎢x3'⎥⎢0⎢⎥⎢⎣x4'⎦⎢0⎣100⎤⎡0⎤⎥⎢⎥-3mgx14⎡⎤⎢⎥00⎥⎢⎥4(M+m)-3m⎥x2⎢4(M+m)-3m⎥⎢⎥+ ⎢⎥001⎥0⎥⎢x3⎥⎢⎥⎢⎥⎥x4⎢⎥3(M+m)g-300⎥⎣⎦⎢⎥4(M+m)l-3ml⎦⎣4(M+m)l-3ml ⎦u⎡x1'⎤⎡0⎢x2'⎥⎢0⎢⎥⎢X’=⎢x3'⎥=⎢⎥⎢0⎣x4'⎦⎢⎣0100⎤0⎡⎤x1⎡⎤⎢1.8182⎥⎢x2⎥0-2.67270⎥⎥⎢⎥ + ⎢⎥ ux3⎥001⎥⎢⎢0⎥⎢⎥⎥⎣x4⎦⎢⎥031.18180⎦⎣-4.5455⎦⎡x1⎤⎢⎥⎡x1⎤⎡1000⎤⎢x2⎥Y= ⎢⎥=⎢⎥⎢⎥⎣x3⎦⎣0010⎦x3⎢⎥⎣x4⎦二、通过Matlab仿真判断系统的可控与可观性,并说明其物理意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单级倒立摆稳定控制
直线一级倒立摆系统在忽略了空气阻力及各种摩擦之后,可抽象成小车和匀质摆杆组成的系统,如图1所示。
图1 直线一级倒立摆系统
图2 控制系统结构 假设小车质量M =0.5kg ,匀质摆杆质量m=0.2kg ,摆杆长度2l =0.6m ,x (t )为小车的水平位移,θ为摆杆的角位移,2
/8.9s m g =。
控制的目标是通过外力u (t)使得摆直立向上(即0)(=t θ)。
该系统的非线性模型为:
u ml x
m M ml mgl x ml ml J +=++=++22)sin ()()cos (sin )cos ()(θθθθθθθ ,其中231ml J =。
解:
一、 非线性模型线性化及建立状态空间模型
因为在工作点附近(0,0==θ
θ )对系统进行线性化,所以 可以做如下线性化处理:32
sin ,cos 13!2!θθθθθ≈-≈-
当θ很小时,由cos θ、sin θ的幂级数展开式可知,忽略高次项后,
可得cos θ≈1,sin θ≈θ,θ’^2≈0;
因此模型线性化后如下:
(J+ml^2)θ’’+mlx ’’=mgl θ (a)
ml θ’’+(M+m) x ’’=u (b) 其中23
1ml J = 取系统的状态变量为,,,,4321θθ ====x x x
x x x 输出T x y ][θ=包括小车位移和摆杆的角位移.
即X=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡4321x x x x =⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡''θθx x Y=⎥⎦⎤⎢⎣⎡θx =⎥⎦⎤⎢⎣⎡31x x 由线性化后运动方程组得
X1’=x ’=x2 x2’=x ’’=m m M mg 3)(43-+-x3+m
m M 3)(44-+u X3’ =θ’=x4 x4’=θ’’=ml l m M g m M 3)(4)(3-++x3+ml
l m M 3)(43-+-u 故空间状态方程如下:
X ’=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡'4'3'2'1x x x x =⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣
⎡-++-+-03)(4)(300100003)(4300
0010ml l m M g m M m m M mg ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡4321x x x x + ⎥⎥⎥⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡-+--+ml l m M m m M 3)(4303)(440 u
X ’=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡'4'3'2'1x x x x =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-01818.31001000
06727.20000
10
⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡4321x x x x + ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-5455.408182.10 u
Y= ⎥⎦⎤⎢⎣⎡31x x =⎥⎦⎤⎢⎣⎡01000001 ⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡4321x x x x 二、通过Matlab 仿真判断系统的可控与可观性,并说明其物理意义。
(1)判断可控性
代码:
A=[0 1 0 0;
0 0 -2.627 0;
0 0 0 1;
0 0 31.1818 0];
B=[0;1.8182;0;-4.5455];
P=ctrb(A,B);
n=rank(P);
运行了得n= 4
所以P 为满秩,系统能控
(2)判断可观性
代码:
A=[0 1 0 0;
0 0 -2.627 0;
0 0 0 1;
0 0 31.1818 0];
B=[0;1.8182;0;-4.5455];
C=[1 0 0 0;
0 0 1 0];
P=obsv(A,C);
n=rank(P);
运行了得n= 4
所以P 为满秩,系统能观。
三、能否通过状态反馈任意配置系统的极点?若能,通过Matlab 仿真确定反馈控制规律K (如图2),使得闭环极点配置在j ±-=-=-=1,2,14.321λλλ上。
并给出系统在施加一个单位脉冲输入时状态响应曲线;
答: 因为系统完全能控,所以能通过状态反馈任意配置系统的极点。
要将闭环极点配置在j ±-=-=-=1,2,14.321λλλ上,所以期望特征方程为 |I —(A-BK)|=()*(+2)*((+1)^2+1)
=^4+5^3+10^2+
+4 Matlab 求解K 如下:
A=[0 1 0 0;
0 0 -2.627 0;
0 0 0 1;
0 0 31.1818 0];
B=[0;1.8182;0;-4.5455];
J=[-1 -2 -1+i -1-i];
K=place(A,B,J);
运行得:
K=[ -0.089378 -0.22345 -9.0957 -1.1894];
未加入极点配置。
仿真图:
未进行极点配置仿真电路图(1)X的响应图:
Θ的响应图:
配置后:
加入极点配置仿真图(2)X的响应图:
Θ的响应图:
四、用MatLab中的lqr函数,可以得到最优控制器对应的K。
要求用LQR控制算法控制倒立摆摆动至竖直状态,并可以控制倒立摆左移和右移;
欲对系统进行最优状态反馈设计,及小化性能指标为:
J=dt 编写matalab程序如下:
A=[0 1 0 0;
0 0 -2.627 0;
0 0 0 1;
0 0 31.1818 0];
B=[0;1.8182;0;-4.5455];
C=[1 0 0 0;
0 0 1 0];
D=[0;0]
x=1;
y=1;
Q=[x 0 0 0;
0 0 0 0;
0 0 y 0;
0 0 0 0];
R=1;
G=lqr(A,B,Q,R);
A1=[(A-B*G)];
B1=[B];
C1=[C];
D1=[D];
t=0:0.01:5;
U=zeros(size(t));
x0=[0.1 0 0.1 0];
[Y,X]=lsim(A1,B1,C1,D1,U,t,x0);
plot(t,Y);
legend('小车','倒立摆');
运行可得:
G=[-1 -1.5495 -18.68 -3.4559]
由图分析可得调节时间很长,所以增加Q的比重,将上程序中的x,y改为x=150,y=150.运行可得:
G=[-12.247 -9.3413 -41.934 -7.7732]
比较可得,控制效果明显改善。
但反馈增益变大,意味着控制作用变强,消耗能量变大。
将G放入系统中,进行simulink仿真可得:
仿真电路图:
仿真结果:X的响应图:
Θ的响应图:
五、写出本次仿真实验的心得体会。
本实验,从数学建模到仿真系统的搭建,再到加进控制环节进行实时控制,最后得出结果的过程中,参考了大量的资料,通过对比整合,设计出了适合自己的一套实验方法:倒立摆数学模型推导部分:首先用线性化数学模型,接着用动态系统空间状态方程法导出状态方程系数矩阵,然后用MATLAB对系统进行可控可观判断及进行几点配置,加入配置后在Simulink软件上进行系统仿真。
最后通过matlab求解线性二次型最优控制的G矩阵,然后加入形同进行Simulink 仿真。
通过本实验,掌握了倒立摆仿真的整个过程,熟悉了MATLAB的仿真软件Simulink的使用,也对系统控制有了较好的理解。
通过仿真,再次认识到了自动控制在改善系统性能方面的重要性,并激发了良好的关于系统控制方面的学习兴趣。
除此之外,通过本次大作业,让我学会了很多word的操作,在此基础上,相信在以后的学习将会有较大帮助。