一种移动式长钢板堆垛装置设计与应用
堆垛机结构设计

摘要自动化立体仓库,也叫自动化立体仓储,利用立体仓库设备可实现仓库高层合理化,存取自动化,操作简便化。
堆垛机是整个自动化立体仓库的核心设备,通过手动操作,半自动操作和全自动操作实现把货物从一处搬运到另一处。
它由机架(上横梁,下横梁,立柱),水平行走机构,载货台,货叉及电气控制系统构成。
本文主要是通过对一套实验室教学装置为基础,以实际为参考而建立的虚拟自动化立体仓库堆垛机系统,作者主要对堆垛机的分类进行简要的介绍,对堆垛机的各个部分的结构进行详细的研究首先对不同堆垛机简介和描述,然后通过巷道堆垛机进行整体分析并设计各个部分的结构,完成对各个部分的受力校核。
关键词:立体仓库、堆垛机、结构、受力校核。
AbstractAutomated multi-layered storehouse, also call for automated warehouse, using three-dimensional warehouse equipment can realize warehouse top rationalization, access automation, operation to handle. Stacking machine is the core of the whole automated warehouse equipment, through manual, semiautomatic operation and automatic operation to put the goods from one place to another place in handling. It is composed of (beam in beam, support), the mobile mechanism, bills, level platform, goods fork and electrical control system structure.This paper is mainly based on a set of laboratory teaching equipment as the basis, the actual for reference and establishing virtual automated multi-layered storehouse stacker system, the author mainly to the stackers classification, a brief introduction about the parts of stacker detailed study of the structure of different stacker first introduction and description, and then through the tunnel stacker integral analysis and design of structure, various parts of each part of the complete stress checking.Keywords: Automated multi-layered storehouse,Stacker,structure,Stress checking目录第1章绪论 (1)自动化立体仓库的起源与发展 (1)课题的提出及主要任务 (2)课题的提出 (2)课题的主要任务 (2)2、分三个部分进行功能模块设计:行走机构,升降机构,货叉的伸缩机构,并详细阐述每部分设计要点与设计过程。
自动化立体仓库堆垛机的简介与操作方法
《装备维修技术》2021年第2期—331—自动化立体仓库堆垛机的简介与操作方法冯昭亮(兰州石化公司化工储运厂,甘肃 兰州 730060)引言:自动化立体仓库通常采用几层,十几层或几十层不同规格的货架来进行单元式的货物储存,同时还利用多种货物搬运设备,其中包括堆垛机,传送机等进行货物的搬运工作。
下面,本文将对其中最为重要的搬运设备,堆垛机,来进行细致的说明。
一、堆垛机简介有轨巷道堆垛机由金属结构,载货台,运行机构,起升机构,货叉机构,限速防坠装置,等部件组成。
(一)金属结构。
金属结构是堆垛机的主要承载构件之一,它由立柱,上横梁,下横梁三部分组成。
立柱是载货台垂直升降的支撑和限制部件,其两侧装有垂直导轨,以保证载货台平稳,灵活地升降。
上横梁由钢板焊接而成,它上部装有起升用的定滑轮和支撑堆垛机的上部导向轮组。
钢丝绳通过这些滑轮及载货台上的动滑轮,使载货台能上升或下降。
上横梁上还装有滑导线的集电装置。
下横梁由钢板焊接而成,是堆垛机的主要支撑部件。
下横梁上装有运行驱动车轮组,从动车轮组,下部水平轮组及夹轨器等装置。
还装有红外通讯,电气控制柜及运行限位开关组等电气装置[1]。
(二)载货台。
载货台是堆垛机承接货物并进行升降运动的部件,载货台由垂直框架和水平框架焊接成直角形结构件。
起升机构上出来的钢丝绳通过上横梁上的定滑轮,垂直框架上的动滑轮带动载货台沿起升轨道上下运动,完成运送货物任务。
载货台装有货叉机构,起升滑轮装置,导向轮组,升降位置检测组件,升降限位撞尺以及光电探测装置等。
(三)运行机构。
运行机构是堆垛机水平运动的驱动机构。
驱动单元采用德国SEW 公司的齿轮电机减速机。
运行机构采用变频闭环调速,高速可达120m/min,低速可达2m/min 以下,保证了生产效率和停准精度两方面的要求。
(四)起升结构。
起升机构由SEW 电机减速机,卷筒及钢丝绳等组成。
起升机构安装在立柱上,是堆垛机载货台进行升降运动的驱动部件,用钢丝绳联接定滑轮与载货台上的动滑轮以驱动载货台升降。
关于堆垛机单双立柱特点的简单介绍
运行机构是堆垛机水平运动的驱动机构。驱动单元采用德国SEW的电机减速机(还有部分采用的是德国DEMAG电机减速机),性能安全可靠。上横梁通过立柱连接于运行机构,并通过导向轮抱紧货架的天轨,从而实现了堆垛机在库内能沿着轨道行进,对货物进行存取和拣选作业。在运行机构上还安装了SICK的激光测距,保证了不同货位的停准精度。
库内的堆垛机具备一套完整的电气控制系统,以控制堆垛机的正常工作。设备电源来源于货架顶端或底端固定的滑触线,三相五线制,交流380V,50Hz。
堆垛机控制系统分三种工作方式,即手动、单机自动、联机自动。
手动方式:工作人员站在电气柜前的踏板上,可以操作堆垛机随意停在巷道内的任意位置。手动控制主要用于堆垛机调试阶段或自动控制出故障时应急使用;
单机自动方式:工作人员在操作面板上设定命令后,即可启动堆垛机,使其自动完成物品的存取工作;
联机自动:堆垛机接收管理机发给的命令,收到命令后,按命令自动进行作业。
有轨巷道堆垛机由金属结构(包括上、下横梁及立柱)、载货台、运行机构、起升机构、货叉机构、限速防坠装置、过载松绳装置、电气控制装置等部件组成。
(见运行机构照片。)
1.7过载及松绳保护装置
过载及松绳保护装置由碟形弹簧、轴、撞尺、开关等元件组成。它的主要作用是:当载货台上的货物重量超过额定起重量的25%时,或载货台上的重量低于空载重量的75%时,撞尺均与开关接触发出信号,通过程序判断即时停止起升电机的运行,保证设备安全。
1.8电气装置
电气装置由电气控制柜、行程开关、滑触线集电器、光电开关、撞尺、激光测距以及红外通信装置等组成。电气控制柜装设在立柱背面下横梁上。在控制柜的正面装有自动操作面板。行程开关分别装在下横梁、立柱等位置,其作用是控制堆垛机起升上下极限位置及强迫换速;运行强迫换速及前后极限位置。光电开关装在载货台上,作用是探测货格内、载货台上、或出入库输送机上有无货物,以免堆垛机误操作或双重入库。载货台上有多个微动开关用来确定叉体伸缩位置。激光测距配合起升和运行电机用于起升和运行定位,红外通信装置作用是接收监控机发出的信号,使堆垛机接受指令并完成自动作业,同时反馈堆垛机的工作状况。
立体仓库巷道式堆垛机设计说明

1 绪论1.1 本课题研究的背景与意义我国现在正处于工业化、城市化发展的高速期,未来一段时间,土地资源和劳动力资源将会成为制约企业发展的瓶颈,鉴于此,建造立体仓库是未来企业发展趋势,自动化立体仓库是现代物流中的重要组成部分,是实现物流系统合理化的关键。
它具有空间利用率高,便于实现自动化管理,实时自动结算库存货物种类和数量等许多优点,对加快物流速度、提高劳动生产率、降低生产成本很重要,已开始应用于汽车、电子、医药、烟草、建材、邮电等许多行业。
堆垛机是自动化立体仓库中最重要的搬运、起重、堆垛设备,对立体仓库的出入库效率有决定性影响,是立体仓库能否达到设计要求的关键设备之一。
而我国在堆垛机制造技术上和世界发达国家有很大差距,鉴于我国未来物流业发展的广阔空间,堆垛机技术落后必将成为限制我国自动化立体仓库发展的瓶颈,使我国在国际物流业竞争中处于不利地位。
鉴于以上因素,发展堆垛机技术有积极意义。
1.2 有轨巷道堆垛机的发展现状有轨巷道堆垛起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆垛机。
其主要用途是在高层货架仓库的巷道沿轨道运行,将位于巷道口的货物存入货格,或者相反,取出货格的货物运送到巷道口,完成出入库作业。
20世纪70年代初期,我国开始研究采用巷道式堆垛机的立体仓库,1980年我国第一座自动化立体仓库在汽车制造厂投产,从此自动化立体仓库在我国得到了迅速发展。
据不完全统计,到目前已建成三百余座。
堆垛机做为立体仓库中最重要的起重运输设备,也得到了较快的发展。
早期的堆垛机是在桥式起重机的起重小车上悬挂一个门架,利用货叉在立柱上的上下运动与立柱的旋转运动来搬运货物,通常称之为桥式堆垛机。
1960年左右在美国出现了巷道堆垛机,这种堆垛机是在地面的导轨上行走,利用货架上部的导轨防止倾倒。
随着立体仓库的发展,巷道堆垛机逐渐替代了桥式堆垛机。
随着计算机控制技术和自动化立体仓库的发展,堆垛机的应用越来越广泛,技术性能越来越好,高度也在不断增加,到1970年实现了由货架支承的高度为40米的堆垛机。
堆垛机的基本结构

堆垛机的基本结构堆垛机是一种自动化仓储设备,可以实现高效、精确的料物搬运和存储。
其基本结构包括主体机架、升降机构、导向装置、行走装置、操作系统等几个部分。
主体机架是堆垛机的骨架,它由高强度钢板焊接而成,具有较高的刚性和稳定性。
主体机架的设计与制造质量对于堆垛机的稳定性和安全性有着决定性的作用。
升降机构是堆垛机的核心部分,它由电动机、变速机构、链条、齿轮、制动器等组成,能够控制货物的上下移动。
堆垛机的升降机构一般采用链条升降结构或刚柔结合升降结构。
链条升降结构简单、可靠,但升降速度较慢;而刚柔结合升降结构升降速度快,但复杂度高,维护难度大。
导向装置主要用于控制货架的准确定位,保证货架的水平度和稳定性,避免货物滑落或倾斜。
导向装置分为机械导向和电控导向两种。
机械导向通过传动机构使导向轮实现拉杆的伸缩,从而吸附货架,在升降过程中保持货架的水平度;电控导向通过传感器和电动机控制导向轮的运行方向和速度,实现精准导向。
行走装置是堆垛机的移动机构,分为滑轮式和导轨式两种。
滑轮式行走装置使用塑料或橡胶滑轮,通过电动机驱动滑轮旋转实现行走;导轨式行走装置使用轴承和导轨轮组配合,通过电动机驱动导轨轮转动实现行走。
导轨式行走装置的定位精度和稳定性更高,但制造成本也更高。
操作系统是堆垛机的大脑,控制堆垛机的各项运行功能。
常见的操作系统包括PLC、PC和嵌入式系统等。
PLC是一种低成本、实时性好、可靠性高的控制器;PC操作系统功能强大,但维护复杂;嵌入式系统集成度高,体积小,功耗低,但开发难度大。
总之,堆垛机的基本结构包括主体机架、升降机构、导向装置、行走装置和操作系统等几个部分,这些部分均是相互配合的,只有协调一致,才能发挥堆垛机的最佳效果。
在堆垛机的设计和制造中,需要充分考虑安全性、稳定性、精确度和生产效率等因素,以满足用户的实际需求。
自动化立体仓库中堆垛机的设计
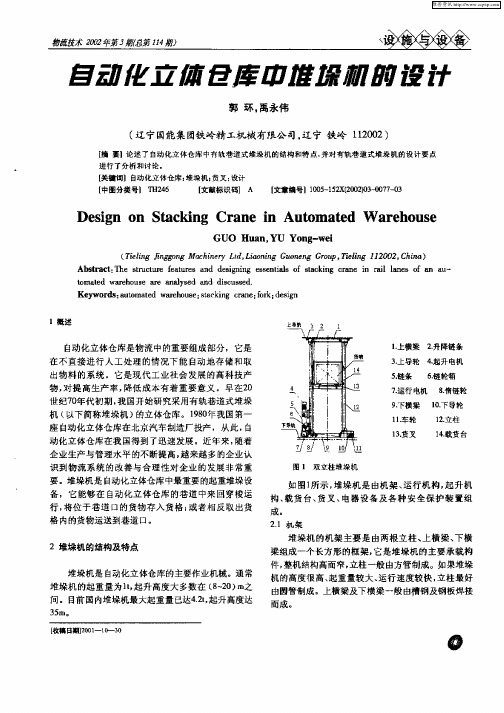
7运行 电机 8惰链轮 . . 9下横粱 l. . 0下导轮 1. 1 车轮 1. 3货叉 1. 2立柱 1. 4载货 台
企业生产与管理水平 的不断提高, 越来越多的企业认 识 到物 流 系 统 的 改 善与 合 理 性 对 企业 的 发展 非 常 重
要 。堆 垛机 是 自动化 立体仓 库 中最重 要 的起 重堆垛 设 备 ,它 能够 在 自动 化立 体仓 库 的巷 道 中来 回 穿梭 运 行 , 位 于巷 道 口的货物 存 入货 格 : 者 相 反 取 出货 将 或 格 内的货物 运送 到巷道 口。
而成 。
O
维普资讯
L 6T 5 E HNOL OG t TC C OGY e , O 2s d lt 14 N 32 O ie a 1J  ̄
堆垛 机 的机 架沿 天 轨 运行 ,为防 止框 架倾 倒 , 在
ห้องสมุดไป่ตู้
上横粱上装有导向轮 。 天轨一般由角钢 、 糟钢或热轧H 型 钢制 成 。
6 轮箱 . 链
物, 对提 高生产率 , 降低成本有着重要意义 。早在2 0 世纪7 年代初期, 0 我国开始研究采用有轨巷道式堆垛
机( 以下 简称 堆 垛 机 )的立 体仓 库 。 18 年 我 国第一 90 座 自动 化立 体 仓 库在 北 京汽 车制 造厂 投产 ,从 此 , 自 动化 立 体 仓库 在我 国得 到 了迅速 发展 。近年 来 , 随着
维普资讯
镑谎技术 20 02年第3期( 14期) 总第 1
鲁 袖 化 立 德 e 库 巾 惟 垛 弧 呐 没 计
郭 环. 禹永伟 ( 辽宁 国能集 团铁岭精工机械有限公 司, 辽宁 铁岭 l20 ) 10 2
【 要l论述 了自动化立体仓库 中有轨 巷道 式堆垛机的结构和特 点, 摘 井对 有轨巷 道式堆垛机 的设计 要点 进行了分析和讨论 。 【 关键词l自动化立体仓库: 堆垛机; 货叉 ; 设计
堆垛机构设计标准规范2018
堆垛机构设计标准规范2018堆垛机是现代物流工程中常用的一种设备,用于快速、高效地搬运和储存货物。
为了保证堆垛机的安全可靠运行,设计上需要遵循一定的标准和规范。
下面是堆垛机构设计的标准规范的一些要点,总字数约为700字。
1. 设计安全标准:堆垛机构设计必须符合国家安全标准,如GB150时压力容器压力容器标准、GB712钢板及钢带的规定等。
同时,根据具体应用环境,还可以参考国际标准,如ISO 3691搬运机械安全要求等。
2. 承重能力:堆垛机构的设计应确保能够承受预期的最大负载。
设计人员需要根据实际需求,合理选取材料和结构形式,确保机构的强度和刚度满足要求。
3. 运动控制:堆垛机构的运动控制要求精确和稳定,以保证货物的准确搬运和储存。
设计人员应根据项目需求,选择合适的执行元件和运动控制系统。
4. 安全保护:堆垛机构设计中应考虑到安全保护措施,如装置防坠落、重物限位、防碰撞等。
设计人员应合理布置这些保护装置,以防止事故发生,保护操作人员和设备安全。
5. 人机工程学:堆垛机操作员使用的控制界面应符合人机工程学的原则,保证操作的简便、安全和舒适。
同时,设计中也要考虑到维修和保养操作的便利性。
6. 维护与检修:堆垛机构的设计应方便日常维护和定期检修。
设计人员应合理布置设备的检修和保养通道,便于操作人员进行日常维护工作,并提供相应的维护手册。
7. 环境适应能力:堆垛机构设计应考虑到环境的因素,如温度、湿度、震动等,选择相应的材料和防护措施,保证机构的可靠性和稳定性。
8. 软件控制:对于自动化堆垛机构,软件的设计也十分重要。
设计人员应编写可靠的控制程序,确保机构的稳定性和工作效率。
总结起来,堆垛机构设计的标准规范包括安全标准、承重能力、运动控制、安全保护、人机工程学、维护与检修、环境适应能力以及软件控制等方面。
设计人员应根据项目需求,遵循这些规范和标准,确保堆垛机的安全可靠运行。
最新双立柱巷道堆垛机的设计—

双立柱巷道堆垛机的设计—目录设计总说明 (I)INTRODUCTION (II)1.3 堆垛机各机构的总体方案设计概述 (3)1.3.1堆垛机的设计要求和技术指标 (3)第二章堆垛机门架的结构设计计算 (7)2.1 门架结构特点 (7)2.2 门架的弯矩和挠度 (7)2.2.1水平载荷产生的弯距 (8)2.2.2由行走车轮的反力产生的弯距 (10)2.2.3有叉取作业产生的弯矩 (12)2.3 设计数据计算校核 (12)2.3.1框架结构的设计数据如下: (12)2.3.2各部分的弯矩 (12)2.3.3结构构件的弯曲应力 (14)第三章堆垛机伸缩货叉机构的设计计算 (15)3.1齿轮齿条直线差动机构工作原理 (15)3.6 货叉相关零件的选取与校核 (21)设计原始数据:载重600kg,伸缩速度20m/min (21)3.6.1伸缩行走轴承的选取校核 (21)3.6.3电动机与联轴器选取与校核 (22)第四章堆垛机行走机构的设计计算 (26)4.2 行走装置的电动机与减速器的选取 (27)鸣谢 (29)设计总说明自动化立体仓库是物流中的重要组成部分,它是在不直接进行人工干预的情况下自动地存储和取出货物的系统。
它是现代工业社会发展的高科技产物,对提高生产率、降低成本有着重要的意义。
堆垛机是自动化立体仓库中最重要的起重堆垛设备,它能够在自动化立体的巷道中来回穿梭运行,将位于巷道口的货物存入货格,或者相反地取出货格内的货物运送到巷道口。
本设计在确定双立柱堆垛机的总体设计方案基础上,重点对货叉伸缩机构和行走机构进行了详细设计。
设计了货叉伸缩机构的结构设计,分析了货叉的受力图,并推导出弯矩挠度公式,设计出货叉的外部结构尺寸,接着又设计校核了货叉内部零件的尺寸,最终设计出了满足条件、灵活、适用、简捷、方便的货叉结构,并选取出适宜的电机、减速器;介绍了堆垛机的行走机构的设计计算,并确定了尺寸及电机、减速器的选取。
堆垛机结构设计

摘要自动化立体仓库,也叫自动化立体仓储,利用立体仓库设备可实现仓库高层合理化,存取自动化,操作简便化。
堆垛机是整个自动化立体仓库的核心设备,通过手动操作,半自动操作和全自动操作实现把货物从一处搬运到另一处。
它由机架(上横梁,下横梁,立柱),水平行走机构,载货台,货叉及电气控制系统构成。
本文主要是通过对一套实验室教学装置为基础,以实际为参考而建立的虚拟自动化立体仓库堆垛机系统,作者主要对堆垛机的分类进行简要的介绍,对堆垛机的各个部分的结构进行详细的研究首先对不同堆垛机简介和描述,然后通过巷道堆垛机进行整体分析并设计各个部分的结构,完成对各个部分的受力校核。
关键词:立体仓库、堆垛机、结构、受力校核。
AbstractAutomated multi-layered storehouse, also call for automated warehouse, using three-dimensional warehouse equipment can realize warehouse top rationalization, access automation, operation to handle. Stacking machine is the core of the whole automated warehouse equipment, through manual, semiautomatic operation and automatic operation to put the goods from one place to another place in handling. It is composed of (beam in beam, support), the mobile mechanism, bills, level platform, goods fork and electrical control system structure.This paper is mainly based on a set of laboratory teaching equipment as the basis, the actual for reference and establishing virtual automated multi-layered storehouse stacker system, the author mainly to the stackers classification, a brief introduction about the parts of stacker detailed study of the structure of different stacker first introduction and description, and then through the tunnel stacker integral analysis and design of structure, various parts of each part of the complete stress checking.Keywords: Automated multi-layered storehouse,Stacker,structure,Stress checking目录第1章绪论 (1)1.1自动化立体仓库的起源与发展 (1)1.2课题的提出及主要任务 (2)1.2.1 课题的提出 (2)1.2.2 课题的主要任务 (2)2、分三个部分进行功能模块设计:行走机构,升降机构,货叉的伸缩机构,并详细阐述每部分设计要点与设计过程。
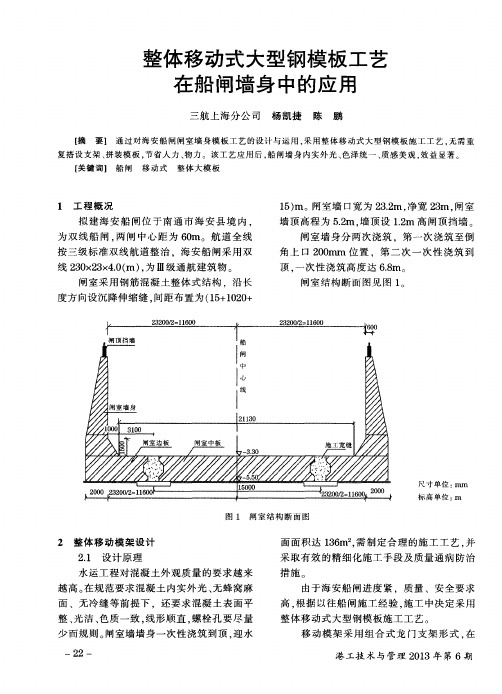
整体移动式大型钢模板工艺在船闸墙身中的应用
整体 大型钢 模平 立面 图见 图 4 。
3 工 艺 流 程
胀 螺丝 固定 , 膨胀 螺丝 间距 1 . 5 m。 移 动模 架平 面 、 立 面 图详见 图 2 、 图3 。 2 . 3 整体 大钢模 设 计 整 体 大钢 模模 板 面板 长 2 0 . 2 m、 高6 . 9 m, 背 楞槽 钢高 7 . 1 m, 模 板 面上 口标高 十 5 . 2 m。 下 口标高 一 1 . 7 m, 在 钢护 木处设 置 缺 口。面板采 用6 mm 厚 热 轧钢 板 ,竖 向筋 板采 用 8 mmx l O O mm 的扁钢 , 间距 4 0 0 mm ; 横 肋采 用 单 根
闸室采 用钢 筋混凝 土整 体式结 构 ,沿长 度方 向设沉 降伸缩缝 , 间距 布置为 ( 1 5 + 1 0 2 0 +
闸
线
闸 室 墙 身
2 1 1 3 0
。
.
严
L
. ≈ 一 3 . 3 0
5 0 0 o —
r 施 一 工 宽 缝
尺寸单位: Ⅱ Ⅱ n
【 关 键 词】 船 闸 移 动 式 整体 大 模 板
1 工 程 概 况
1 5 ) m。闸室 墙 口宽为 2 3 . 2 m. 净宽 2 3 m, 闸室
拟建 海 安船 闸位 于南 通 市海 安 县 境 内 ,
为双 线船 闸 , 两 闸 中心距 为 6 0 m。航 道全 线
墙 顶高 程为 5 . 2 m, 墙顶 设 1 I 2 m 高 闸顶挡墙 。
闸室墙 身分两 次浇筑 ,第 一次 浇筑 至倒 角上 口 2 0 0 mm 位置 ,第 二 次 一次 性 浇筑 到
堆垛机

攀枝花学院本科课程设计(论文)堆垛机货叉伸缩机构设计学生姓名:何泽栋学生学号: 201010601050院(系):机械工程学院年级专业: 2010级机制2班指导教师:陈新德讲师2013年3月2日攀枝花学院教务处制课程设计(论文)指导教师成绩评定表题目名称堆垛机货叉伸缩机构设计评分项目分值得分评价内涵工作表现20% 01 学习态度 6 遵守各项纪律,工作刻苦努力,具有良好的科学工作态度。
02 科学实践、调研7 通过实验、试验、查阅文献、深入生产实践等渠道获取与课程设计有关的材料。
03 课题工作量7 按期圆满完成规定的任务,工作量饱满。
能力水平35% 04 综合运用知识的能力10能运用所学知识和技能去发现与解决实际问题,能正确处理实验数据,能对课题进行理论分析,得出有价值的结论。
05 应用文献的能力 5能独立查阅相关文献和从事其他调研;能提出并较好地论述课题的实施方案;有收集、加工各种信息及获取新知识的能力。
06设计(实验)能力,方案的设计能力5能正确设计实验方案,独立进行装置安装、调试、操作等实验工作,数据正确、可靠;研究思路清晰、完整。
07 计算及计算机应用能力 5 具有较强的数据运算与处理能力;能运用计算机进行资料搜集、加工、处理和辅助设计等。
08对计算或实验结果的分析能力(综合分析能力、技术经济分析能力)10 具有较强的数据收集、分析、处理、综合的能力。
成果质量45% 09插图(或图纸)质量、篇幅、设计(论文)规范化程度5 符合本专业相关规范或规定要求;规范化符合本文件第五条要求。
10 设计说明书(论文)质量30 综述简练完整,有见解;立论正确,论述充分,结论严谨合理;实验正确,分析处理科学。
11 创新10 对前人工作有改进或突破,或有独特见解。
成绩指导教师评语指导教师签名:年月日目录第一章绪论 (1)第1.1节研究的背景与内容 (1)1.1.1概述 (1)1.1.2有轨巷道堆垛机的发展现状及特点 (2)1.1.3有轨巷道堆垛机的类型 (3)1.1.4巷道堆垛机的特点 (3)第1.2节设计的目的和意义 (4)第1.3节设计的内容及要求 (4)第1.4节设计参数 (4)第二章堆垛机货叉的设计思路 (5)第三章堆垛机货叉的设计 (7)第3.1节货叉传动装置的总体选型 (7)第3.2节货叉传动齿轮、齿条的计算 (7)第3.3节货叉传动链轮、链条的设计计算 (10)第3.4节制动器的制动容量的设计 (12)第四章参考文献 (13)第1章绪论第1.1节研究的背景与内容1.1.1概述随着生产力的发展, 生产规模的扩大和产品结构的调整, 客观上要求作为工业企业物资供应基地的物资仓库进行改建或扩建。
钢板堆垛过程自动化控制实践
控制 系统如 图 1 所示 ,2级 的数 据服务器 、 L 跟踪控制服务器 、 人机界面通过高速以太网连接
通 讯 ;2控制 系统 通过 高速 以太 网和 工 业控 制 网 L 与 L 级 控制 系 统 P C双 通 道 连 接 通 讯 ; 场 检 1 L 现
测元 件金 属检 测 器 、 行 元 件通 过 接 线 与 IO模 执 /
d c n a a o tn i .T u o d e o o ca d sca e ei a eb e c iv d u ema u lb ri e sy h sgo c n mi n o ilb n f sh v e n ahe e . l n t t
Ke wo d L v l t r l r c i g a d p st n n o t l y tm , v l1b sca t ma in c nr l y tm ,D - y r e e mae a a kn n o i o i g c n r se 2 i t i os e L e a i u o t o t se o os i
邢 宝 勤 韩三峰 雷 国福
( 韶关钢铁有限责任公司 )
摘 要 本文详细叙述 了韶钢热 轧宽 中厚板厂钢板堆 垛过程 自动化控制技 术方 案及实施 步骤 , 主要 是充
分利用二级物流控制跟踪系统 简化堆 垛机 一级控制 步序 , 实现堆垛 机 的动作 步序更 加合理 、 快捷 , 在保证 产品
经堆 垛机 输入 辊 道 送 至 堆垛 机人 口辊 道 , 由堆垛
目前 国 内有 3 O多条板 材生 产线 , 品堆 垛 全 成
过程多 由操作员手动完成。这种工艺模式劳动强
度 大 , 作效 率 低 。韶 钢 宽 中厚 板 生 产 线控 制 系 工
一种用于移动仓库的驱动装置[实用新型专利]
![一种用于移动仓库的驱动装置[实用新型专利]](https://img.taocdn.com/s3/m/d2bb4a3884254b35effd349b.png)
专利名称:一种用于移动仓库的驱动装置专利类型:实用新型专利
发明人:蔡先进,马继春,马继雄
申请号:CN201721335334.X
申请日:20171017
公开号:CN207392820U
公开日:
20180522
专利内容由知识产权出版社提供
摘要:本实用新型涉及用于大型钢材的仓库领域,具体是一种用于移动仓库的驱动装置,包含电动机,减速器,滚轮,其特征是:电动机及减速器安装在移动仓库的库门上,库门下方安装有滚轮支架A,滚轮支架A上部为水平放置的支撑板A,滚轮支架A下部两侧为竖直放置且与轨道平行的支撑板B,支撑板B之间装有两个平行的传动轴A、B,传动轴A上装有传动轮A,传动轮A与减速器传动连接,传动轴A上还装有传动轮B,传动轴B上装有传动轮C,传动轮C与传动轮B传动连接,传动轴B上还装有滚轮;本实用新型节省了人力,提高了工作效率,适用于大型钢材移动仓库。
申请人:黄冈市劲马窑炉机械有限公司
地址:438200 湖北省黄冈市浠水县洪山工业园1号路
国籍:CN
代理机构:黄石市三益专利商标事务所
代理人:饶卓识
更多信息请下载全文后查看。
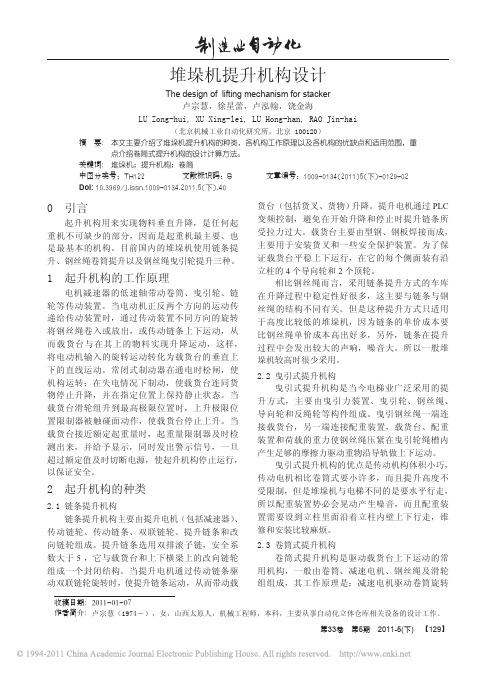
堆垛机提升机构设计
升 方 式, 主 要 由 曳 引 力 装 置、 曳 引 轮、 钢 丝 绳、 导向轮和反绳轮等构件组成。曳引钢丝绳一端连 接载货台,另一端连接配重装置,载货台、配重 装置和荷载的重力使钢丝绳压紧在曳引轮绳槽内 产生足够的摩擦力驱动重物沿导轨做上下运动。
n 卷=
,根据前面得出的数据,v =
80/60m/S,D0 = 250 + 8 = 258mm,
计算得:n 卷=
≈99 转 /min
3)计算卷筒的扭矩
M 扭=
×P,因为本案例是 2 根钢丝绳,
因此 M 扭=
×266×9.8×2 = 672N·m。
根 据 以 上 数 据, 选 出 合 适 的 减 速 电 机, 以 SEW 电机为例,合适的电机型号是 K87DV132M4, 电机功率是 7.5KW,输出转速 99 转 /min,减速比 i = 14.45。
关键词: 堆垛机;提升机构;卷筒
中图分类号:TH122
文献标识码:B
文章编号:1009-0134(2011)5(下)-0129-02
Doi: 10.3969/j.issn.1009-0134.2011.5(下).40
0 引言
起升机构用来实现物料垂直升降,是任何起 重机不可缺少的部分,因而是起重机最主要、也 是最基本的机构。目前国内的堆垛机使用链条提 升、钢丝绳卷筒提升以及钢丝绳曳引轮提升三种。
货台(包括货叉、货物)升降。提升电机通过 PLC 变频控制,避免在开始升降和停止时提升链条所 受拉力过大。载货台主要由型钢、钢板焊接而成, 主要用于安装货叉和一些安全保护装置。为了保 证载货台平稳上下运行,在它的每个侧面装有沿 立柱的 4 个导向轮和 2 个顶轮。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种移动式长钢板堆垛装置设计与应用
发表时间:2018-12-26T09:49:10.847Z 来源:《防护工程》2018年第24期作者:王成林
[导读] 目前市场针对普通冷轧钢材剪切基本加工尺寸均在5米以内,因而现有的钢板堆垛装置,也只是针对5米以下的钢板,一旦钢板的长度超过5米,则现有的钢板堆垛装置不能适用。
王成林
济南宝钢钢材加工配送有限公司山东济南 250200
1背景技术
目前市场针对普通冷轧钢材剪切基本加工尺寸均在5米以内,因而现有的钢板堆垛装置,也只是针对5米以下的钢板,一旦钢板的长度超过5米,则现有的钢板堆垛装置不能适用。
2设计内容
为了解决上述技术问题,设计移动式长钢板堆垛装置,包括两条相互平行的轨道、放置在轨道上与轨道相匹配的滚轮、设置在轨道上方的车体、安装在车体上用以驱动滚轮运动的驱动机构、设置在车体上的若干个由开合电机驱动的联轴器,所述每个联轴器之间通过横向轴相串联,所述联轴器的纵向的左右两侧均设有一根丝杠,所述每根丝杠上均匹配有一个螺母,所述每个螺母的上方固定有一个开合架,所述开合架上设有气缸,所述气缸的输出轴上铰接在一根曲柄上,所述曲柄的另外一端固定在转轴上,所述转轴转轴上固定有固定板,固定板上固定有旋转板,所述旋转板上设有一排短辊和一排长辊,所述短辊设置在长辊的上方,所述车体的上方固定有底板。
为了驱动车体沿轨道运行,所述驱动机构包括电动机、主轴、分别安装在电动机和和主轴上的两个链轮以及分别与两个链轮相连的链条,所述滚轮安装在主轴的两端。
为了增强丝杠的抗压能力,该钢板堆垛装置,所述丝杠的末端设有支撑轴承。
为了增长转轴的长度,以适用于长钢板的堆垛,该钢板堆垛装置,所述转轴为若干根,所述若干根转轴之间设有连接用的涨套。
为了避免划伤钢板,该钢板堆垛装置,所述长辊和短辊均由聚氨酯材料制成。
3实施效果
(1)包括若干根通过涨套连接在一起的转轴,因而其长度适于长钢板;由开合电机驱动的联轴器也为若干个,每个联轴器之间通过横向轴相串联,因而其宽度也适用于不同宽度的长钢板,且能保证动作的同步,因而整个装置的主运动机构均适用于不同宽度的长钢板,其尺寸宽度可达1.65米、长度可达12米;
(2)通过涨套连接在一起的转轴,由气缸控制,可90度旋转,因此可将长辊上所托的钢板放到车体底板上。
(3)长辊和短辊均由聚氨酯材料制成,因而能避免划伤长钢板。
(4)本长钢板堆垛装置可整体移动,方便长钢板的吊运。
附图说明
图1是钢板堆垛装置主视图。
图2是钢板堆垛装置左视图。
图中:1、轨道,2、滚轮,3、主轴,4、丝杠,5、螺母,6、支撑轴承,7、开合架,
8、气缸,9、曲柄,10、转轴,11、固定板,12、短辊,13、长辊,14、旋转板,
15、底板,16、联轴器,17、车体,18、涨套,19、电动机,20、链条,21、横向轴。
具体实施方式
如图1和图2所示,本钢板堆垛装置,包括两条相互平行的轨道1、放置在轨道1上与轨道1相匹配的滚轮2、设置在轨道1上方的车体17、安装在车体17上用以驱动滚轮2运动的驱动机构、设置在车体17上的若干个由开合电机驱动的联轴器16,所述每个联轴器16之间通过横向轴21相串联,所述联轴器16的纵向的左右两侧均设有一根丝杠4,所述每根丝杠4上均匹配有一个螺母5,所述每个螺母5的上方固定有一个开合架7,所述开合架7上设有气缸8,所述气缸8的输出轴上铰接在一根曲柄9上,所述曲柄9的另外一端固定在转轴10上,所述转轴10上固定有固定板11,固定板11上固定有旋转板14,所述旋转板14上设有一排短辊12和一排长辊13,所述短辊12设置在长辊13的下方,所述车体17的上方固定有底板15;所述驱动机构包括电动机19、主轴3、分别安装在电动机19和和主轴3上的两个链轮以及分别与两个链轮相连
的链条20,所述滚轮2安装在主轴3的两端;所述丝杠4的末端设有支撑轴承6;所述转轴10为若干根,所述若干根转轴10之间设有连接用的涨套18;所述长辊13和短辊12均由聚氨酯材料制成。
具体使用的时候,启动电动机19,在电动机19的驱动下,通过链轮传动,主轴3即开始转动,主轴3转动的同时带动滚轮2沿轨道1运行,当运行至指定地点时,关闭电动机19,此时车体17即停靠在指定地点。
车体停靠稳定之后,根据钢板的宽度,由开合电机驱动横向轴21转动,在横向轴21的作用下,通过联轴器16传动,驱动丝杠4转动,在丝杠4的带动下,螺母5连同开合架67左右移动,当左右两个开合架7之间的距离适宜时,关闭开合电机;关闭开合电机之后,即可将长钢板放置在开合架7上的长辊13上,放置完成后,再一次启动开合电机,驱动开合架7移动,使长钢板夹在长辊13和短辊12之间,然后启动气缸8,在气缸8的作用下,旋转板14连同长辊13和短辊12向下翻转,将长钢板卸在底板15上。
当底板15上放满长钢板,也就是将长钢板堆垛完成之后,再由电动机19驱动滚轮2沿轨道1离开,将堆垛后的长钢板放置在指定位置即可。
本移动式长钢板堆垛装置,包括若干根通过涨套18连接在一起的转轴10,因而其长度适于长钢板;由开合电机驱动的联轴器16也为若干个,每个联轴器16之间通过横向轴21相串联,因而其长度也适用于长钢板,且能保证动作的同步,因而整个装置的主运动机构均适用于长钢板,其尺寸可达12米;另外,长辊13和短辊12均由聚氨酯材料制成,因而能避免划伤长钢板。
通过以上设备技改,基本满足超5米钢板加工堆垛,满足超长板料加工需求。