2.1拉氏变换及反变换(补充)
常用拉普拉斯变换及反变换

419附录A 拉普拉斯变换及反变换1.表A-1 拉氏变换的基本性质 齐次性)()]([s aF t af L =1线性定理叠加性)()()]()([2121s F s F t f t f L ±=±一般形式=−=][′−ٛ−=−=−−−−=−∑11)1()1(1222)()()0()()(0)0()(])([)0()(])([k k k k nk k n n n n dt t f d t f f s s F s dt t f d L f sf s F s dt t f d L f s sF dt t df L M )( 2微分定理初始条件为0时)(])([s F s dtt f d L n nn =一般形式 }}∑∫∫∫∫∫∫∫∫∫∫∫==+−===+=++=+=nk t n n k n n n n t t t dt t f ss s F dt t f L sdt t f s dt t f s s F dt t f L sdt t f s s F dt t f L 101022022]))(([1)(])()([]))(([])([)(]))(([])([)(])([个共个共L L M3积分定理初始条件为0时}nnn s s F dt t f L )(]))(([=∫∫个共L4 延迟定理(或称t 域平移定理))()](1)([s F e T t T t f L Ts−=−− 5 衰减定理(或称s 域平移定理))(])([a s F e t f L at +=−6 终值定理 )(lim )(lim 0s sF t f st →∞→=7 初值定理 )(lim )(lim 0s sF t f s t ∞→→=8 卷积定理)()(])()([])()([21021021s F s F d t f t f L d f t f L tt =−=−∫∫τττττ4202.表A-2 常用函数的拉氏变换和z 变换表 序号 拉氏变换E(s)时间函数e(t) Z 变换E(z)1 1δ(t)12 Ts e −−11∑∞=−=0)()(n T nT tt δδ 1−z z3 s1 )(1t 1−z z 421s t2)1(−z Tz5 31s 22t32)1(2)1(−+z z z T6 11+n s!n t n )(!)1(lim 0aTn n n a e z z a n −→−∂∂− 7 as +1ate −aTe z z−− 8 2)(1a s + atte− 2)(aT aT e z Tze −−−9 )(a s s a +ate−−1 ))(1()1(aT aT e z z z e −−−−− 10 ))((b s a s ab ++− btate e−−−bTaT e z z e z z −−−−− 11 22ωω+st ωsin 1cos 2sin 2+−T z z Tz ωω12 22ω+s st ωcos1cos 2)cos (2+−−T z z T z z ωω 13 22)(ωω++a s t eatωsin −aTaT aT eT ze z T ze 22cos 2sin −−−+−ωω 14 22)(ω+++a s a st e at ωcos −aTaT aTe T ze z T ze z 222cos 2cos −−−+−−ωω15aT s ln )/1(1−T t a/az z −4213. 用查表法进行拉氏反变换用查表法进行拉氏反变换的关键在于将变换式进行部分分式展开,然后逐项查表进行反变换。
拉氏变化及反变换

t 0
1
2 单位阶跃函数
f (t )
1
0, t 0 1(t ) 1, t 0
0
t
L[1(t )]
0
1 st 1 1(t )e dt e 0 s s
st
3 单位斜坡函数
f (t )
f (t )
0, t 0 f (t ) t, t 0
1 1 1(t ) 1(t T ) T T
L[ f (t )]
1 1 sT 1 e (1 e sT ) Ts Ts Ts
T T f (t ) f1 (t ) f1 (t ) f1 (t ) f1 (t T ) 2 2 4 4 T 4 T 4 2 t 2 (t ) 2 (t ) 2 (t T ) T T 2 T 2 T
1 jt sin t (e e jt ) 2j
st
Hale Waihona Puke e j cos j sin e j cos j sin
L[sin t ] sin t e dt
0
0
1 jt jt st e e e dt 2j
10.像函数的微分性质
设L[ f (t )] F (s)
dF ( s) Ltf (t ) ds
11.像函数的积分性质
设L[ f (t )] F (s)
1 L f (t ) F ( s)ds t s
例 求图示方波和三角波的拉氏变换
方波: f (t ) f1 (t ) f1 (t T )
1 1 1 s 2 2 s j s j s 2
拉氏变换

控制原理补充讲义——拉氏变换拉氏变换是控制工程中的一个基本数学方法,其优点是能将时间函数的导数经拉氏变换后,变成复变量S的乘积,将时间表示的微分方程,变成以S表示的代数方程。
一、拉氏变换与拉氏及变换的定义1、拉氏变换:设有时间函数,其中,则f(t)的拉氏变换记作:称L—拉氏变换符号;s-复变量; F(s)—为f(t)的拉氏变换函数,称为象函数。
f(t)—原函数拉氏变换存在,f(t)必须满足两个条件(狄里赫利条件):1)在任何一有限区间内,f(t)分断连续,只有有限个间断点。
2)当时,,M,a为实常数。
2、拉氏反变换:将象函数F(s)变换成与之相对应的原函数f(t)的过程。
—拉氏反变换符号关于拉氏及变换的计算方法,常用的有:①查拉氏变换表;②部分分式展开法。
二、典型时间函数的拉氏变换在控制系统分析中,对系统进行分析所需的输入信号常可化简成一个或几个简单的信号,这些信号可用一些典型时间函数来表示,本节要介绍一些典型函数的拉氏变换。
注意:六大性质一定要记住1.单位阶跃函数2.单位脉冲函数3.单位斜坡函数4.指数函数5.正弦函数sinwt由欧拉公式:所以,6.余弦函数coswt其它的可见下表:拉氏变换对照表 序号 F(s) f(t) 序号 F(s) f(t)11 1121(t) 123t13414511+Ts Tte T-1 156)(1a s s +ate --1167)1(1+Ts sTt e--117)1sin(122ϕξωξωξω----t e n t nn8189191020三、拉氏变换的性质1、线性性质若有常数k1,k2,函数f1(t),f2(t),且f1(t),f2(t)的拉氏变换为F1(s),F2(s),则有:,此式可由定义证明。
2、位移定理(1)实数域的位移定理若f(t)的拉氏变换为F(s),则对任一正实数a有,其中,当t<0时,f(t)=0,f(t-a)表示f(t)延迟时间a.证明:,令t-a=τ,则有上式=例:求其拉氏变换(2)复数域的位移定理若f(t)的拉氏变换为F(s),对于任一常数a,有证:例:求的拉氏变换3、微分定理设f(t)的拉氏变换为F(s),则其中f(0+)是由正向使的f(t)值。
拉氏变换与反变换
机电控制工程所涉及的数学问题较多,经常要解算一些线性微分方程。
按照一般方法解算比较麻烦,如果用拉普拉斯变换求解线性微分方程,可将经典数学中的微积分运算转化为代数运算,又能够单独地表明初始条件的影响,并有变换表可查找,因而是一种较为简便的工程数学方法。
拉普拉斯变换的定义如果有一个以时间为自变量的实变函数,它的定义域是,那么的拉普拉斯变换定义为式中,是复变数,(σ、ω均为实数),称为拉普拉斯积分;是函数的拉普拉斯变换,它是一个复变函数,通常也称为的象函数,而称为的原函数;L是表示进行拉普拉斯变换的符号。
式()表明:拉氏变换是这样一种变换,即在一定条件下,它能把一实数域中的实变函数变换为一个在复数域内与之等价的复变函数。
几种典型函数的拉氏变换1.单位阶跃函数的拉氏变换单位阶跃函数是机电控制中最常用的典型输入信号之一,常以它作为评价系统性能的标准输入,这一函数定义为单位阶跃函数如图所示,它表示在时刻突然作用于系统一个幅值为1的不变量。
单位阶跃函数的拉氏变换式为当,则。
所以()图单位阶跃函数2.指数函数的拉氏变换指数函数也是控制理论中经常用到的函数,其中是常数。
令则与求单位阶跃函数同理,就可求得()3.正弦函数与余弦函数的拉氏变换设,,则由欧拉公式,有所以)同理)4.单位脉冲函数δ(t)的拉氏变换单位脉冲函数是在持续时间期间幅值为的矩形波。
其幅值和作用时间的乘积等于1,即。
如图所示。
图单位脉冲函数单位脉冲函数的数学表达式为其拉氏变换式为此处因为时,,故积分限变为。
5.单位速度函数的拉氏变换单位速度函数,又称单位斜坡函数,其数学表达式为见图所示。
图单位速度函数单位速度函数的拉氏变换式为利用分部积分法令则所以当时,,则()6.单位加速度函数的拉氏变换单位加速度函数的数学表达式为如图所示图单位加速度函数其拉氏变换式为()拉氏变换的主要定理根据拉氏变换定义或查表能对一些标准的函数进行拉氏变换和反变换,但利用以下的定理,则对一般的函数可以使运算简化。
拉氏变换(补充内容)
s = σ + jω ,以s为自变量,按某一确定法则 以 为自变量, 构成的函数为复变函数,记作: 构成的函数为复变函数,记作: G( s ) = u + jv
有复数 若
K ( s − z1 )( s − z 2 ) L ( s − z n ) G( s ) = s ( s − p1 )( s − p2 ) L ( s − pn )
[ [
− at
sin ωt =
]
ω
s L[cos ωt ] = 2 s +ω2
]
24/50
机械工程控制基础
拉氏变换
4 拉氏变换的性质 时间尺度定理(相似定理) 5) 时间尺度定理(相似定理)
1 s L[ f (at )] = F ( ) a a t L[ f ( )] = aF (as ) a
&&时间放大或缩小 &&时间放大或缩小
∫
∞
0
δ (t ) d t = 1
13/50
机械工程控制基础
拉氏变换
几种典型环节的拉氏变换: 3 几种典型环节的拉氏变换: 3、单位斜坡(单位速度) 单位斜坡(单位速度)
0 f (t ) = t
t<0 t≥0
∞ 0
Laplace变换 Laplace变换
1 2 s
分部积分法
F [s ] = L[t ] = ∫ te − st dt
lg f = lg( a × b) = lg a + lg b = c
的方式,然后将所得的结果进行反对数即可, 的方式,然后将所得的结果进行反对数即可,即将乘法运算 转换成加法运算
f = lg −1 c
是将除法运算转换成减法运算。 对于 f = a / b ,是将除法运算转换成减法运算。
拉氏变换及拉氏反变换

t dt 1 ,且δ(t)有如下
t f t dt f 0
式中f(0)——t=0时刻的f(t)的函数值。
由拉氏变换的定义得
L t t e st dt e st
0
t 0
1
2.2.2 几种典型函数的拉氏变换
L f at
1 s F a a
2.2.3 拉氏变换主要定理
微分定理
设f(n)(t)表示f(t)的n阶导数,n=1,2,3,……正整数, f(t)的拉氏变换为F(s),则
L f t s F s sf 0 f 0
F s
s 1 s 1 k k 1 2 s 2 5s 6 s 2s 3 s 2 s 3
s 1 s 2 s 1 1 k1 s 2s 3 s 2 s 3 s 2 s 1 s 3 s 1 2 k2 s 2s 3 s 3 s 2 s 3 2 1 1 1 2 f t L1 F s L1 L1 L 2e 3t e 2t s 2 s 3 s 2 s 3
拉氏变换亦与此相似,即把微分方程变换为代数方程 求解。
2.2.1 拉氏变换的定义
定义
对于时间函数f(t),如果满足
当t<0时,f(t)=0; 当t≥0时,实函数f(t)的积分
f t e
0
st
dt 在s的某一域内收敛,则定义f(t)的拉氏变换
为
F s f t e st dt
拉普拉斯变换的基本性质变换及反变换
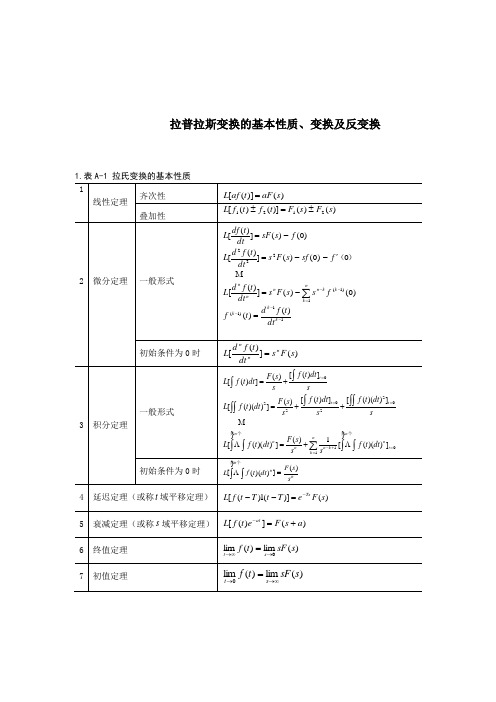
拉普拉斯变换的基本性质、变换及反变换1.表A-1 拉氏变换的基本性质2.表A-2 常用函数的拉氏变换和z变换表3. 用查表法进行拉氏反变换用查表法进行拉氏反变换的关键在于将变换式进行部分分式展开,然后逐项查表进行反变换。
设)(s F 是s 的有理真分式1110111)()()(a s a s a s a b s b s b s b s A s B s F n n n n m m m m ++++++++==---- (m n >) 式中系数n n a a a a ,,...,,110-,m m b b b b ,,,110- 都是实常数;n m ,是正整数。
按代数定理可将)(s F 展开为部分分式。
分以下两种情况讨论。
① 0)(=s A 无重根这时,F(s)可展开为n 个简单的部分分式之和的形式。
∑=-=-++-++-+-=ni ii n n i i s s c s s c s s c s s c s s c s F 12211)( (F-1)式中,n s s s ,,,21 是特征方程A(s)=0的根。
i c 为待定常数,称为F(s)在i s 处的留数,可按下式计算: )()(lim s F s s c i s s i i-=→ (F-2)或iss i s A s B c ='=)()( (F-3)式中,)(s A '为)(s A 对s 的一阶导数。
根据拉氏变换的性质,从式(F-1)可求得原函数[]⎥⎦⎤⎢⎣⎡-==∑=--n i i i s s c L s F L t f 111)()(=ts n i i ie c -=∑1(F-4)②0)(=s A 有重根设0)(=s A 有r 重根1s ,F(s)可写为())()()()(11n r rs s s s s s s B s F ---=+=nn i i r r r r r r s s c s s c s s c s s c s s c s s c -++-++-+-++-+-++-- 11111111)()()( 式中,1s 为F(s)的r 重根,1+r s ,…, n s 为F(s)的n-r 个单根;其中,1+r c ,…, n c 仍按式(F-2)或(F-3)计算,r c ,1-r c ,…, 1c 则按下式计算:)()(lim 11s F s s c r s s r -=→)]()([lim111s F s s dsdc r s s r -=→-)()(lim !11)()(1s F s s dsd j c r j j s s jr -=→- (F-5))()(lim )!1(11)1()1(11s F s s dsd r c r r r s s --=--→原函数)(t f 为 [])()(1s F Lt f -=⎥⎦⎤⎢⎣⎡-++-++-+-++-+-=++---n n i i r r r r r r s s c s s c s s c s s c s s c s s c L 111111111)()()( t s nr i i t s r r r r ie c e c t c t r c t r c ∑+=---+⎥⎦⎤⎢⎣⎡+++-+-=1122111)!2()!1((F-6)。
02第二章拉氏变换的数学方法(第二讲)
L[sin t 1(t )] L[
e
j t
e 2j
j t
1(t )]
1 1 1 2 2 2 j s j s j s
2.2 拉氏变换的性质
2 微分定理 L[ dx(t ) ] sX ( s ) x (0 ) dt 推论: n d (1)L[ x (t )] s n X ( s ) s n 1 x (0 ) s n 2 x (0 ) n dt
x(t) x(t)
as
X (s)
t a
t
L[sin (t 4) 1(t 4)] e
4 s
s
2 2
2.2 拉氏变换的性质 例:求如下图的拉氏变换。
f (t ) f1 (t ) f 2 (t ) E 1(t ) E 1(t t 0 )
L[ f (t )] E s e
2 st
t0 t0
0
0
te dt
st
s
e
st
0
0
s
dt
1 单位速度函数
t
2.1.1 简单函数的拉氏变换
7 单位加速度函数
0 x (t ) 1 2 2 t
t0 t0
x(t)
L x (t ) 1(t ) 1 s
3
1 2
0
(2)在零初始条件下
s
2
x n (0 ) s
n
L[ x (t )( dt ) ]
n
X (s) s
2.2 拉氏变换的性质
4 衰减定理 例:已知
02第二章拉氏变换的数学方法(第二讲)

2.2 拉氏变换的性质 5 延时定理
L[ x(t a ) 1(t a)] = e
x(t) x(t)
as
X (s)
t a
t
L[sin ω (t 4) 1(t 4)] = e
4 s
ω 2 2 s +ω
2.2 拉氏变换的性质 例:求如下图的拉氏变换. 求如下图的拉氏变换.
f (t ) = f1 (t ) + f 2 (t ) = E 1(t ) E 1(t t0 )
∫
t
0
x (ξ ) y ( t ξ ) d ξ = y ( t ) x ( t )
拉氏变换的应用
1,试求 L [ e at cos
βt]
0, t < 0 2,试求 x ( t ) = 3 t 的拉氏变换. 的拉氏变换. te , t ≥ 0
0, t < 0 3,试求 x ( t ) = 的拉氏变换. 的拉氏变换. sin(ω t + θ ), t ≥ 0
2.2 拉氏变换的性质 4 衰减定理 例:已知
ω L[sin ωt 1(t )] = 2 2 s +ω
L[e x(t )] = X ( s + a)
at
s L[cos ωt 1(t )] = 2 2 s +ω ω 求: L[e at sin ωt 1(t )] = ? 2 2 ( s + a) + ω s+a at L[e cos ωt 1(t )] = ? 2 2 ( s + a) + ω
E E E t0 s t0 s e = (1 e ) L[ f (t )] = s s s
2.2 拉氏变换的性质 6 初值定理
拉氏变换与拉氏反变换
16
n
1 2
e n t sinn 1 2 t
序号
f(t)
F(s)
1
17
1
2
e
n t
sin n 1 2 t 1
2
2
s s 2 n s
2 n
arctan
1 1 1
2
e n t sin n 1 2 t 1 2
二、拉氏反变换及其计算方法
(一)拉氏反变换的定义
已知象函数F(s),求出与之对应的原函数f(t)就 称为拉氏反变换,计作 L1 F (s) f (t )
L [ F ( s )] f ( t )
1
2 j r j
1
r j
F ( s )e st ds
式中,r为大于F(s)的所有奇异点实部的实常数。 所谓奇异点,即F(s)在该点不解析,也就是F(s) 在该点及其邻域不处处可导。
1 1 1 L1 1 2 tt L1 2 t L 2 ss s
2. 部分分式展开法 (利用逆变化的线性原理)
控制工程中,象函数F(s)通常可以表示有理分式形式
B( s ) bm s m bm 1 s m 1 bm 2 s m 2 b1 s b0 F ( s) A( s ) an s n an1 s n1 an 2 s n 2 a1 s a0
1 s 2
( s pi )( s p j )
Ak An s pk s pn
Br ,1 , Ak ,, An 为实数,称留数
留数的方法可分为下面三种情况研究。
拉氏变换2.
L
xt
t
0
X
s
ds
证:
X sds xtest ds
0
s0
xt dt est ds
0
s
0
xt dt
1 e st t
s
= L[ x(t) ] x(t) est dt
t
0t
(11)周期函数的象函数
设函数x(t)是以T为周期的周期函数,即
x(t T ) x(t)
t nest dt
0
1 s n1
u neu du
0
n! s n1
3 拉氏变换的性质
(1) 线性定理 若
Lx1t X1s
L[ X 2 (t)] X 2 (s)
则L[ax1(t) bx2 (t)] aX1(s) bX 2 (s)
L[ax1(t) bx2 (t)] [ax1(t) bx2 (t)] est dt
(5)延时定理(时间域平移定理)
L[x(t a) 1(t a)] eas X (s)
该性质与衰减定理对偶存在应用。
(6)初值定理
limx(t) limsX (s)
t 0
s
证:根据微分定理
L[ dx(t) ] dx(t)est dt
dt
0 dt
L[ dx(t)] sX (s) x(0 ) dt
...
xn (0 ) s
(2)在零初始条件下,
X (s)
L[ ... x(t)dt...dt] sn
该性质与微分定理对偶存在应用。
(4)衰减定理(s域平移定理)
L[eat x(t)] X (s a)
证:
L[eat x(t)] eat x(t)est dt 0 x(t)e(sa)dt 0 X (s a)
补充:拉氏积分变换L
0
e e f (t) ( jw)tdt s jw f (t) stdt
0
0
1.定义:设f (t)为定义在[0, )上的实值函数。如果对于复变量
s jw,F(s) f (t)estdt存在,则称F(s)为f (t)的拉氏变换。 0
Beihua University
北华大学机械工程学院 15
控制工程基础
补充:拉氏变换
2)证明:L[
f
(t
)]
f
(t
) est
dt
0
e s
f
(t
) es(t )
d (t
)
0
令xt es
f
(x) esx dx
(s p )(s p )(s p )...(s p ) (s p )(s p ) (s p ) (s p )
1
2
3
n
1
2
3
n
式中,A1和A2可按下式求解:
p p F(s)(s
)(s
1
) 2 或ssp1 p2
p p
A1s A2
p p p p (s
补充:拉氏变换
例5
求解微分方程组:x(2t )x(t2) x(ty)(t )2yy((tt))170ee22tt
x(0) 1 ;初始条件: y(0) 3
解:令X (s) L[x(t)],Y (s) L[ y(t)]
得:sX (s) x(0) 2X 2X (s) sY (s)
2.1拉氏变换及反变换(补充)

例2 ℒ [e−αt cosωt] = 例3
−αt
ω ℒ [e sinωt] = ( s + α )2 + ω 2
s +α ( s + α )2 + ω 2
机械工程控制基础
六、初值定理和终值定理
拉普拉斯变换及反变换
处无冲激, 初值定理 若ℒ [f(t)]=F(s),且 f(t)在t = 0处无冲激, , 在 处无冲激 则
n [t ] = ℒ [t n−1 ] s
n
机械工程控制基础
拉普拉斯变换及反变换
n ℒ [t ] = ℒ [t n−1 ] s
n
1 当n 1 ℒ [t] = 2 ; =, s 2 2 当n 2,ℒ [t ] = 3 ; = s
⋯ 依次 推 得 ℒ 类 ,
机械工程控制基础
常 用 函 数 的 拉 普 拉 斯 变 换 表 δ(t) δ(n)(t) u(t) t tn e-at te-at tne-at e-jwt 1 sn 1/s 1/s2
设ℒ [ f (t )] = F(s)
dn f (t) n n−1 − n−2 1) ′ 0−) ... − f (n−( −) 0 − 0 ℒ [ n ] = s F(s) − s f( ) s f ( − dt
1 d (sin ω t )] 例1 ℒ [cos ω t ] = ℒ [ ω dt s ω 1 = [s 2 − sin ωt 0 − ] = 2 2 s +ω2 ω s +ω
例
机械工程控制基础
四、时域平移
拉普拉斯变换及反变换
设ℒ [ f (t )] = F(s)
f(t)
平移
f(t-t0)
机械工程控制基础
附+拉氏变换与拉氏反变换
+∞ 0−
f (t )e − st d
由象函数求原函数的变换称为拉普拉斯反变换, 由象函数求原函数的变换称为拉普拉斯反变换, 记为: 记为: 即:
f (t ) = L [ F ( s )]
F ( s ) ⇒ f (t ) = L−1 [F (s )] − −拉普拉斯反变换
f (t ) ⇒ F ( s ) = L[ f (t )] − −拉普拉斯变换
//
(0 )
+
d n f (t ) L = s n F ( s ) − s n −1 f (0 − ) − s n − 2 f ′(0 − ) n dt − ⋯ − f ( n −1) (0 − )
南昌大学机电学院
特别: 特别:
若初值 f ( 0 ) = f 则有:
(0 ) = ... = L [ f / (t )] = sF (s ) L [ f // (t )] = s 2 F (s ) L [ f (3 ) (t )] = s 3 F (s ) [ f (n ) (t )] = s n F (s ) L
/
( )
∞
0
f (t )e dt = ∫ e df (t )
− st − st 0
∞
令:u = e dv = df (t )
− st
du = − se dt v = f (t )
− st
南昌大学机电学院
则:L f (t ) = e
/
[
பைடு நூலகம்
]
− st
推广: 推广: L f
(t )] = s 2 F (s ) − sf (0 + ) − f / (0 + ) df (t ) / + 式中:f (0 ) = │
《自动控制原理》第2章 拉氏变换与拉氏反变换
=
(s
+
s+a a)2 +
2
(四)有理分式的拉氏反变换
Ch2 控制系统的数学模型
F (s)
=
B(s) A(s)
=
b0 s m a0 s n
+ b1sm−1 + a1sn−1
++ bm ++ an
(m n)
定义: F(s) 的零点:B(s)=0的解 zj F(s)的极点:A(s)=0的解 pi F(s)的特征多项式:A(s)
c1
=
F (s)s
s=0
=
s+2 (s + 3)(s +1)2
s=0
=
2 31
=
2 3
c2
=
F (s)(s
+ 3)
s = −3
=
s+2 s(s +1)2
s = −3
=
−1 − 3 4
=
1 12
Ch2 控制系统的数学模型
c3
=
F (s)(s
+ 1) 2
s = −1
=
s+2 s(s + 3)
s = −1
Ch2 控制系统的数学模型
Ch2 控制系统的数学模型
Ch2 控制系统的数学模型
Ch2 控制系统的数学模型
Ch2 控制系统的数学模型
Ch2 控制系统的数学模型
Ch2 控制系统的数学模型
Ch2 控制系统的数学模型
Ch2 控制系统的数学模型
Ch2 控制系统的数学模型
或 相似定理
Ch2 控制系统的数学模型
设 p1 = + j, p1 = − j,
拉普拉斯变换及反变换ppt课件

一、拉氏变换及其特性 1、 拉氏变换定义
如果有一个以时间 t为自变量的实变函数 f t ,它的定义域是 t 0 ,那么 f t 的拉普
拉斯变换定义为
F
s
L
f
t
0
f
t estdt
式中,s是复变数,s j( 、
均为实数), est 称为拉普拉斯积分;F s 0
>> p=[1 -120 25 126
用num和den分别表示F(s)的分子和分母多项式, 即:num = [b0 b1 … bm]
den = [a0 a1 … an] MATLAB提供函数residue用于实现部分分式展 开,其句法为:
[r, p, k] = residue(num, den)
f (t) L1(F (s)) 1
c
j
F
(s)e
st
ds
2j c j
式中 L1 表示拉普拉斯反变换的符号
2、拉氏反变换的计算方法 由象函数求原函数的方法:
方法一:利用拉氏反变换定义求 ——不常用解
方法二:查拉氏变换表求解——对简单的象函数适用 方法三:部分分式法——象函数为有理分式函数时适用
p1)r ]}s p1
br j
1 dj
{ j!
ds
j
[F
s
(s
p1)r ]}s p1
b1
1
d r1
(r
{ 1)!
ds
r
1
[
F
s
(s
p1)r ]}s p1
例
F(s)
(s
s 1 2)3 ( s
3)
解:F (s)
拉氏变换和反变换参考

2 机电控制工程数学基础本章主要内容、大体要求、重点和难点主要内容(1) 复数及复数表示方式,复变函数概念。
(2) 初等函数概念,复变函数的导数。
(3) 复变函数积分,计算方式。
(4) 罗朗级数、留数定理。
(5) 拉氏变换概念、常常利用函数拉氏变换、拉氏变换性质、拉氏反变换。
大体要求(1) 了解复变量的表示方式,复变函数的概念,会计算留数。
(2)了解拉氏变换概念,并用概念求常常利用函数的拉氏变换,会查拉氏变换表。
(3)了解拉氏变换性质及其应用。
(4) 会用部份分式法,求拉氏反变换。
重点:复变函数表示方式;拉氏变换的概念;用拉氏变换的概念求常常利用函数的拉氏变换;拉氏变换性质及应用,用部份分式法求拉氏反变换。
难点:(1) 成立在复数域描述一个函数的概念。
而初学者适应于时刻函数。
通过拉氏变换这一数学工具将时刻函数变成复域的函数,其长处是将微分方程变换为代数方程,使对系统的分析、综合方便。
(2) 拉氏变换性质的应用。
学习本章时,一般了解复变函数概念,复数表示方式;了解拉氏变换概念及其性质的推导进程,通过作习题,熟练掌握各性质的应用,为后继章节学习打下基础。
复变量及复变函数(1) 复数的概念在学习初等代数时,已经明白在实数范围内,方程012=+x是无解的,因为没有一个实数的平方等于–1。
由于解方程的需要,人们引进一个新数j,称为虚单位,并规定12-=j从而j 是方程012=+x 的一个根。
对于任意二实数x,y 咱们称jy x z +=为复数,其中x,y 别离称为z 的实部和虚部,记作 )()(z I y z R x m e ==当x=0 时, jy z =称为纯虚数;当y=0时, j x z 0+=,这时z 就是实数。
要注意复数与实数有一些不同,如:两个复数相等,必需它们的实部和虚部别离相等。
一般说来,任意两个复数不能比较大小。
(2) 复数的代数运算两个复数111jy x z +=,222jy x z +=1) 加减法的概念:)()()()(21212211y y j x x jy x jy x ±+±=+±+2) 乘法的概念)()())((211221212211y x y x j y y x x jy x jy x ++-=++3) 除法的概念设 0222≠+=jy x z22222212222221212211y x y x y x j y x y y x x jy x jy x +-+++=++ 复数的运算和实数的情形一样,也知足互换律、结合律和分派律。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
at
]
]
0
e
1
at
e
st
dt
1 s a
e
( s a )t 0
1 sa
j t
s j
机械工程控制基础
3 . f ( t ) ( t ) (单位脉冲函数)
0 (t 0 ) (t ) (t 0 )
拉普拉斯变换及反变换
L
1 2 j
F1 ( s ) F 2 ( s )
九、尺度变换性
机械工程控制基础
拉 普 拉 斯 变 换 的 基 本 性 质 表
拉普拉斯变换及反变换
机械工程控制基础
拉 普 拉 斯 变 换 的 基 本 性 质 表
拉普拉斯变换及反变换
机械工程控制基础
拉普拉斯变换的基本性质表
拉普拉斯变换及反变换
机械工程控制基础
F ( s)
例
机械工程控制基础
四、时域平移
设 ℒ [ f ( t )] F ( s )
拉普拉斯变换及反变换
f(t)
平移
f(t-t0)
机械工程控制基础
五、 S域平移
设 ℒ [ f ( t )] F ( s )
则 ℒ [e
t
拉普拉斯变换及反变换
f ( t )] F ( s )
机械工程控制基础
拉普拉斯变换及反变换
二、拉普拉斯反变换 1、由象函数求原函数 f(t)=L-1[F(s)] (1)利用公式
f (t )
2πj
1
j
j
F ( s )e d s
st
t 0
较麻烦
(2)经数学处理后查拉普拉斯变换表
F ( s ) F1 ( s ) F 2 ( s ) F n ( s )
u(t) t
F(s)=
0
0
e
st
dt
1 s
e
st 0
1 s
机械工程控制基础
2 . f (t ) e
at
拉普拉斯变换及反变换
u (t )
(指数函数)
( t 0) 0 f (t ) t e ( t 0)
F(s)= ℒ [e ℒ [e
0
t
F(s)=L[f(t)]=
te
0
st
dt
t s
e
st
0
1
s
e
st
0
dt
1 s
2
机械工程控制基础
5 . f ( t ) t (幂函数)
n
拉普拉斯变换及反变换
ℒ [t ] t e
n n 0
st
dt
e
st
0
t
n
de s
2
; ;
当n=2,ℒ [t ]
2 s
3
依次类推, 得
ℒ
机械工程控制基础
常 用 函 数 的 拉 普 拉 斯 变 换 表 δ(t) δ(n)(t) u(t) t tn e-at te-at tne-at e-jwt 1 sn 1/s 1/s2
n!
拉普拉斯变换及反变换
sn+1
1
s+a
1
(s+a)2
ℒ
1[
1 s
] e
t
( t 0)
机械工程控制基础
2.3
一、线性性质
拉普拉斯变换及反变换
拉普拉斯变换的基本性质
若 ℒ [f1 ( t )] F1 ( s ) , ℒ [f 2 ( t )] F2 ( s )
则 ℒ [a f1 ( t ) b f 2 (t )] aF ( s ) bF ( s ) 1 2
s 0
1 s
1 s1
1 ) 1
i(t )
1 s
t
s1
机械工程控制基础
例4:已知F(s)=
1 s a
拉普拉斯变换及反变换 ,求f(0)和f(∞)
解:由初值定理得
f (0)
lim
sF ( s )
s
lim
s
1 s a
1
s
由终值定理得
f ( )
lim
sF ( s )
• 对方程两端进行拉氏变换,应用线性组合与微分定理可得 [S2R(s)-Sr(0-)-r/(0-)]+a1[SR(s)-r(0-)]+a0R(s)=b1[SE(s)-e(0-)]+b0E(s)
• 整理合并得
(S2+a1S+a0)R(S)-(S+a1)r(0-)-r/(0-)=(Sb1+b0)E(s)-b1×0
象函数F(s) 用大写字母表示 ,如F(s) ,I(s),U(s)。
拉普拉斯变换对,记为:
L f(t)
L
_1
F(S)
机械工程控制基础 2.2
拉普拉斯变换及反变换
常用函数的拉普拉斯变换
1 . f ( t ) u ( t )(单位阶跃函数)
1 t 0 u (t ) 0 t 0
机械工程控制基础
拉普拉斯变换及反变换
补充:拉普拉斯变换及反变换 概述 拉氏变换对是求解常系数线性微分方程的工具。 把线性时不变系统的时域模型简便地进行变换,经 求解再还原为时间函数。
机械工程控制基础
内容
一、 拉普拉斯变换
拉普拉斯变换及反变换
(1)定义
(2)常用函数的拉普拉斯变换 (3)拉普拉斯变换的基本性质 二、 拉普拉斯反变换
例1 例2
ℒ [ A (1 e ℒ [s in t ]
1 [
t
)]
A(
1 2j
1 s
1 s
j t
)
ℒ[
(e
j t
欧拉公式
e
)]
1
2 j s j
1 s j
]
s
2
2
机械工程控制基础
二、微分定理
设 ℒ [ f ( t )] F ( s )
机械工程控制基础
一、拉普拉斯变换 1. 定义
L aplace 正变换
Laplace 反变换
拉普拉斯变换及反变换
F (s)
f (t ) 1
0
0
表示为:
st
f (t )e — —
j
dt
F(s)=ℒ[f(t)] f(t)=ℒ -1[F(s)]
2 j
j
F ( s )e ds
1 R Ls
1 sa
1 L
1 s R L
(5)作Laplace反变换得
零状态响应电流 i(t)= ℒ-1[I(s)]
L(
1 R L a)
(e
at
e
R L
t
) u (t )
机械工程控制基础
八、S域卷积性
L L
拉普拉斯变换及反变换
域 卷 积 性 : 若 f 1 ( t ) F1 ( s ), f 2 ( t ) F 2 ( s ) 则 f1 ( t ) f 2 ( t )
dt
r (t ) a1
d dt
r (t ) a0 r (t ) b 1
d dt
e (t ) b0 e (t )
初态为r(0-)及r/(0-),原始值为e(0-)=0,求r(t)的象函数。
解:设r(t),e(t)均可进行拉氏变换即有E(S)=L[e(t)] , R(S)=L[r(t)]
拉普拉斯变换及反变换
机械工程控制基础
拉普拉斯变换及反变换
机械工程控制基础
拉普拉斯变换及反变换
机械工程控制基础
拉普拉斯变换及反变换
机械工程控制基础
• 作业
1、 写出拉普拉斯变换定义式 2、
拉普拉斯变换及反变换
机械工程控制基础
拉普拉斯变换及反变换
1
__
(s-1)2
机械工程控制基础
拉普拉斯变换及反变换
st
( t 0)
st
拉氏变换积 分上限说明:
F (s)
f (t )e
dt
0
0
f (t )e
st
dt
0
f (t )e
st
dt
0
当f(t)含有冲激函数项时,此项 0
机械工程控制基础
s
拉普拉斯变换及反变换
j 称为复频率 。
f(t) ,t [0,)称为原函数,属时域。 原函数 用小写字母表示,如 f(t) ,i(t),u(t) F(s) 称为象函数,属复频域 。
L
例 右图所示电路中,电压源为
u i (t ) e
at
u (t )
,
R i(t) L h(t)
试用时域卷积定理求零状态响应电流i(t)。 解(1)写出系统动力学方程
i (t ) R L di ( t ) dt u i (t )
u i (t )
(2)作Laplace变换得
I ( s ) R LsI ( s ) U i ( s )
Ui(s)
H(s)
I(s)
系统方框图
机械工程控制基础