ab伺服驱动器说明书
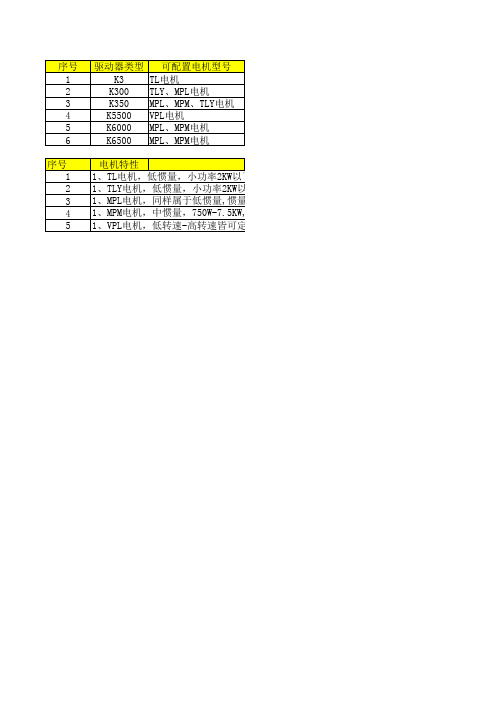
AB各型号伺服电机区别
可搭配PLC类型 MIClogix(小型)CMX1769(中型)CLX1756(大型) MIClogix(小型)CMX1769(中型)CLX1756(大型) CMX1769(中型)CLX1756(大型) CMX1769(中型)CLX1756(大型) CMX1769(中型)CLX1756(大型) CMX1769(中型)CLX1756(大型)
安装调试方便
序号 1 2 3 4 5 6 序号 1 2 3 4 5
驱动器类型 K3 K300 K350 K5500 K6000 K6500
可配置电机型号ቤተ መጻሕፍቲ ባይዱTL电机 TLY、MPL电机 MPL、MPM、TLY电机 VPL电机 MPL、MPM电机 MPL、MPM电机
电机特性 1、TL电机,低惯量,小功率2KW以下220V供电 1、TLY电机,低惯量,小功率2KW以下220V供电 1、MPL电机,同样属于低惯量,惯量略大于TL和TLY,高精度,动率范围(160W-15KW),220-5 1、MPM电机,中惯量,750W-7.5KW,高精度,宽电压 1、VPL电机,低转速-高转速皆可定做,高精度,功率从190W-8kw,动力线及编码器线为一根
支持通讯及接线方式 1、PTO(脉冲)2、modbus rtu 3、ASCII码 4、模拟量控制5、IO控制 1以太网(非CIP方式),脉冲、模拟量、IO控制 1以太网(CIP) 1以太网(CIP) 1只能走光纤方式通讯 1以太网(CIP)
功率2KW以下220V供电 小功率2KW以下220V供电 低惯量,惯量略大于TL和TLY,高精度,动率范围(160W-15KW),220-500V供电 50W-7.5KW,高精度,宽电压 转速皆可定做,高精度,功率从190W-8kw,动力线及编码器线为一根电缆,安装调试方便
AB伺服控制系统应用

离线(OFF LINE)创建和配置运动轴
19、双击运动组中的AXIS_1打开轴的属性,弹出如下窗口。
离线(OFF LINE)创建和配置运动轴
20、在‘Conversion’页面中确定运动方式为‘旋转’或‘直线’。
离线(OFF LINE)创建和配置运动轴
21、在‘Units’页面中选择合适的负载坐标的单位。(注意:此单位即为该 轴在程序中可以直接使用的运行单位,如直线负载可以为‘mm’、‘cm’、 或者‘inch’,而旋转负载则为‘deg’、‘rev’或者‘rad’等等。)
16、为新建的驱动器命名,按照DEMO配置选择节点地址,按OK以确认配置。
离线(OFF LINE)创建和配置运动轴
17、此时弹出如下窗口,选择‘Associated Axes’页面,选择相应的运动组 中的关联驱动轴。
பைடு நூலகம்
离线(OFF LINE)创建和配置运动轴
18、点击OK以确认配置,之后按照同样步骤配置其他的伺服驱动器,完成后 I/O配置如下。
离线(OFF LINE)创建和配置运动轴
3、点击‘OK’后,将看到如下的窗口。
离线(OFF LINE)创建和配置运动轴
4、打开控制器属性的窗口,选择‘Date/Time’的页面,在‘Make this controller the Coordinated System Time master’选项处打勾。
离线(OFF LINE)创建和配置运动轴
25、此时看到如下窗口。若在‘Drive Enable Input Checking’前打勾,表 明该伺服驱动器必须在硬件使能触点接通的情况下,才允许使能;否则只要通 过软件即可直接控制伺服驱动器的使能。点确认完成配置。
在线(ON LINE)配置并测试各轴
GSxxxxA系列交流伺服驱动器操作手册

外形尺寸及重量
驱动器型号 GS0020A/ GS0040A /GS0075A/GS0100A
GS0150A/GS0210A
外形尺寸图 (mm) 图1
图2
重量 (Kg) 1.5
2.8
产 品 概 要
图 1:GS0020A/ GS0040A /GS0075A/GS0100A
版权申明
北京和利时电机技术有限公司保留所有权力
产品使用说明书内容参照了相关法律基准和行业基准。您在使用我们的产品时,如对本说 明书提供的内容有疑问,请向购买产品的销售人员、或向本公司邮箱、客户服务热线咨询。
北京和利时电机技术有限公司(以下简称和利时电机)保留在不事先通知的情况下,修改 本手册中的产品和产品规格参数等文件的权力。
产品特性 型号命名 产品组成 产品概要
GS 系列伺服驱动器以美国 TI 公司最新的数字处理芯片(DSP)作为核心控制芯片,采 用了先进的全数字电机控制算法,完全以软件方式实现了电流环、速度环、位置环的闭环 伺服控制,具备良好的鲁棒性和自适应能力,可配合多种规格的伺服电机,适应于需要快 速响应的精密转速控制与定位控制的应用系统,如:数控机床、印刷机械、包装机械、造 纸机械、塑料机械、纺织机械、工业机器人、自动化生产线等。
试运行和操作
通电前注意事项 ……………………………………………………………… 24 操作和显示 …………………………………………………………………… 24 通电试运行 …………………………………………………………………… 29 参数汇总和说明 ……………………………………………………………… 33
运行和调整
产品特性
DSP 全数字控制方式,可以实现多种电机控制算法,软件更新、升级方便; 内置电子齿轮控制功能; 多种控制模式:脉冲(≤500kpps)、模拟电压(±10V)、数字设定、混合模式等; 六种脉冲输入方式,与用户上位机接口方便灵活; 编码器反馈脉冲可分频输出,分频数:1~255; 键盘及 LED 数码管显示; RS232C / RS485 / CANBUS 通讯接口可选,与 PC 机联接,可进行伺服参数的设定与修改; 保护功能:具有过压、泄放回路、过流、过载、堵转、失速、位置超差、编码器信号异常等报警; 内置回馈能量吸收电路,也可外接放电电阻; 提供一路接口电源输出:12V(100mA)。 通过 CE 认证。
之山伺服ZSD ZD AB系列说明书

1.2 设备损坏的警告
警告 请勿将动力电直接接到驱动器 U、V、W 的输出端,这样会对驱动器造成损坏。 伺服电机与伺服驱动器之间须直连,请勿在驱动器U、V、W的输出端连接容性元件, 如噪声抑制滤波器、脉冲干扰限制器等,这样会使驱动器无法正常工作。 请按要求将驱动器输入端接入符合标准的电源。 通电前请验证电缆连接的正确性和可靠性。 请按要求选购并使用电机,否则可能会造成驱动器和电机的损坏。 伺服电机的额定转矩要高于有效的连续负载转矩。 负载惯量与伺服电机惯量之比应小于推荐值。
2.2 产品型号对照
2.2.1 伺服驱动器
3
杭州之山科技有限公司
2.2.2 伺服电机
130 ST - M 100 10
交流伺服驱动器
额额额额1000rpm 额额额额10N.m 反反反反反反(M反代代正代代代) 正正正正正正正 130系系
4
杭州之山科技有限公司
3 安装
交流伺服驱动器
3.1 注意事项
U1,V1,W1, 电机动力线连接端子
U2,V2,,W2
ZSD-ZD1530AB 主床电机要和电机 U1、V1、 W1 一一对应连接;摇床电机要和电机 U2、 V2、W2 一一对应连接
L,N,LC,NC
主电源以及控制电源 接线端子
L,N 为主回路电源输入端子 AC220V 50HZ,不 要与电机输出端子 U、V、W 连接 LC,NC 为 控 制 回路 电 源输 入 端 子 AC220V /50HZ
屏蔽地
记号
5V
GND
A AB BZ+ ZU UV VW WFG
功能说明
伺服电机光电编码器用+5V电源;电 缆长度较长时,应使用多根芯线并 联。 与伺服电机光电编码器A+相连接 与伺服电机光电编码器A-相连接 与伺服电机光电编码器B+相连接 与伺服电机光电编码器B-相连接 与伺服电机光电编码器Z+相连接 与伺服电机光电编码器Z-相连接 与伺服电机光电编码器U+相连接 与伺服电机光电编码器U-相连接 与伺服电机光电编码器V+相连接 与伺服电机光电编码器V-相连接 与伺服电机光电编码器W+相连接 与伺服电机光电编码器W-相连接 屏蔽地线端子
ab520操作手册

ASM操作手册AB520自动超声波焊线机档案名:M157C修订本:B日期:2002年5月目录第1章安全措施第2章机器介绍2.1 机器总说明2.2 特微2.3 规格说明第3章机器结构3.1 系统分块图3.2 机器结构3.2.1 工作夹具3.2.2 X-Y-θ工作台3.2.3 高速焊头3.2.4 电源3.2.5 真空工作夹具(任选的)3.3显示与观测3.3.1 显示系统3.3.2 观测系统3.4 PC控制系统3.4.1 PC控制系统3.5驱动系统3.6机器控制部件3.7开关面板3.8 控制面板第4章机器安装第5章机器校正5.1 说明5.2 校正步骤5.3 马达微调5.4 调节对应面参数5.4.1 手动调节聚焦高度5.4.2 自动调节聚焦高度5.4.3 手动调节光线5.4.4 自动调节光线5.5 摄像机校准5.6 图像识别系统(PRS)校准5.7 校正聚焦偏距5.8 校正焊尖偏距(BTO)5.8.1 one point BTO by CRT 5.8.2 two point BTO by CRT 5.8.3 one point BTO by Manual 5.9 校正旋转中心(COR)5.10 校正USG板5.11 线夹校正5.12 焊接力度校正第6章操作与控制6.1 启动机器6.2 机器控制程序说明6.3 机器控制6.3.1 自动焊线控制6.3.2 焊线程序输入步骤6.3.3 焊线程式操作6.3.4 编辑焊线程序6.3.5 自动焊接操作6.3.6 CRT焊接操作6.3.7 错误讯息6.4 自动COR(旋转中心)控制6.4.1 利用自动(AUTO)图像(预设的图像)6.4.2 利用手动图像(用户选定的图像)6.4.3自动COR的持续时间6.5 BQM控制6.5.1 什么是BQM6.5.2 如何设定失线探测?6.6 优化焊线参数控制6.7 PRS优化6.7.1 管芯校准6.7.2 PCB校准6.7.3 测试已载入的图像第7章控制功能与参数7.1 系统设定操作表7.2 编写操作表7.3 自动焊线操作表7.4 测试维修操作表第8章故障检修8.1 故障检修I (焊线质量)8.2 故障检修II (报警及错误信息)8.3 故障检修III [线路板及驱动器(LED)发光二极管显示说明]8.3.1 AB520步进器及电磁线圈驱动器(02-15757)8.3.2 HIPEC520 DUAL ELMO AC伺服驱动器(02-15716)/(02-15716-01)8.3.3 AB520AC伺服驱动器(03-15831)(03-15832)8.3.4 PC可编程频率USG板(03-20903)8.3.5 LED驱动板(MARK II)(03-20814-02)8.3.6 HIPEC 520 PC 控制板(03-20818)8.3.7感应器分配板(03-20886)第1章(略)第2章机器介绍.2.1 机器总说明AB520铝线楔形焊线机为您提供完全精密间距及高速灵活的楔形焊接技术,精制的焊头及XYθ工作台实现了精确高速的铝线焊接,保障了较高生产能力(可能提高30%),进而增加了您在市场上的竟争力,先进的“Eagle PRS”(Eagle图像识别系统)保证了焊接位置的精度,也减少了人员操作茧自缚,提高了成本效率,以这些尖端特性,AB520适用于焊接比较广范围的线路板上晶片(COB)产品,继承AB510系列之经验,增加了以下新技术:XY工作台利用滚珠螺杆获得精密的分解度和更高的准确性θ工作台直接与100K精密编码器连接并间接地由伺服马达由精密计时带驱动,伺服一步旋转为θ工作台提供较精密的0.0036°旋转,这样提高了θ工作台的分解度焊头由滚珠螺杆驱动获得较高的准确性和稳定性AB520配有电脑控制系统2.2特微2.2.1焊接系统较低惯性及稳定型的焊头稳定有效的AC伺服马达控制XYZ和θ轴焊头行程间距23mm采用垂直高速移动及30º的送线角度可编程焊接力度5—200G正常及反向焊接功能可编程控制个别焊线线弧带有自行校准功能的ASM超声波发生器可编程焊接时间和焊接力度高分解度的Xyθ工作台及焊头自动送线/扯线系统提供可编程的线尾长度非接触式音圈马达线夹提供可编程夹持力度配有失线自动检测的焊接质量监控系统(BQM),使因未粘合及基片污染而导致的生产损失达到最低光学系统ASM EAGLE256灰度级PRS特定的副像素精度用于图像校正高速及高精度的自动校正功能,节省了时间并减少了人员操作错误自动调焦和自动光度调节提供了精确的图像识别效果XYθ工作台AC伺服马达控制XY及θ轴通用灵活的2.2 X 2.2”行程范围的XY工作台适用于不同应用退偶合XY工作台设计用于减少了人员操作错误控制系统易于操作的综合控制面板15”VGA显示器易于配置的转换开关适用于110V/220VAC输入电压双语操作表显示操作舒适的人机工作台座理想的安全保护装置用于预防温度热和过电压故障选项订制的真空工作夹具侧面摄像机用于焊接监察2.3 规格说明1)焊接焊接方式:超声波焊接焊接直径:20-50.4um(0.8-2.0mil)铝线出线角度:30°焊接速度:200ms在2.0mm(79mil)线长焊接压力:可编程(5-200G)焊接时间:程序控制(0-255ms)焊接功率:可编程(0-1watt)焊线位置:±15.3um(±0.6mil)@3°焊接区域:距旋转中心12.5mm(0.492”)半径2)记忆容量程序数软盘:5/1.44M:(根据程序尺寸)硬盘:60每个程序最大PCB数:1每个程序最大管芯数:100每个程序最大线数:5000条3)X-Y工作台工作台行程:58mm X 58mm(2.2” X 2.2”)机械结构:横向滚轮轴承工作台加滚珠螺杆精确度:0.625um(0.0246mil)4)θ工作台工作夹具:AB520系列工作夹具PCB尺寸:最大101.6mm X 152.4mm(4”X 6”)机器结构:工作夹具直接与精密的100K编码器接合,并间接地按照精密计时皮带由AC伺服马达驱动精确度:0.0036°5)焊头Z-行程:23mm(0.9”)机械结构:横向滚轮轴承加滚珠螺杆精确度:1um(0.039mil)6)对位点数管芯:1,2点基片:0,1,2点7)光学系统校准系统:4.1倍放大倍数(镜像校准),可编程控制焦距显微镜:10倍-45倍放大倍数(可随意调校放大倍数)8)操作、安全及显示系统操作用件:AB520键盘控制面板(控制球+10个快捷功能键+功能旋钮)开关:在机台前面板上的开关用于机台电源、侧光、显示器安全措施:易于操作的电源切断开关,机台接地操作者接地插头过电压保护装置温度保护装置显示器:VGA显示器用于观察工作效果及控制操作资料存储:软驱动器及快记忆体(DOC)9)电源电压:110V/220V/230V AC±10%(单相,工厂预设)频率:50/60HZ功率:600W10)尺寸及重量长X宽X高尺寸(基本机身):900mmX730mmX770mm(35.4”X28.7”X30.3”)重量:192kg第三章机器结构3.1 系统分析图3.2 机器结构AB520由以下部件组成3.2.1 工作夹具工作夹具适合于固定不同尺寸的PCB3.2.2 X-Y-θ工作台X-Y-θ工作台应用横向滚珠导轨及滚珠螺杆来提高分解度和焊线精度3.2.3 高速焊头完全重新设计的焊头更适合于高速焊线。
BBF-D(HD)A系列双轴交流伺服驱动器使用说明书2011.10.20

2. 安装及选型...........................................................................................................................6
2.1 BBF-HDA 系列伺服驱动器外形尺寸............................................................................................. 6 2.2 环境要求.......................................................................................................................................... 6 2.3 伺服单元的安装.............................................................................................................................. 7
AB不同型号驱动器及伺服电机更换步骤

1 、 更 换 胎 体 传 递 环 驱 动 器 , 2094-BM01 更 换 为 2094-BM02,更换原则是只能更换功率大的驱动器; 2、更换后压辊轴向伺服电机,MPL-B4530K更换为MPLB4530F;
山东金宇轮胎有限公司
设备保全部
驱动器更换步骤
山东金宇轮胎有限公司
设备保全部
驱动器更换步骤
伺服电机更换步骤
查看伺服电机参数
回零、加减速参数、电机位 置、速度增益、扭矩;
山东金宇轮胎有限公司
设备保全部
伺服电机更换步骤
程序离线修改
选择change catalog目录
山东金宇轮胎有限公司
设备保全部
伺服电机更换步骤
查找电机型号
电机目录
找到对应的伺服电机型 号;也可以根据型号进 行快速查找选find,找 到以后选择ok;
找到驱动器对应型号,找到以后OK;
山东金宇轮胎有限公司 设备保全部
驱动器更换步骤
输入驱动器名称
输入原名称;
数入驱动器原名称,ok;
山东金宇轮胎有限公司 设备保全部
驱动器更换步骤
选择驱动器对应伺服
选择对应轴;
选择驱动器对应电机,ok;
山东金宇轮胎有限公司 设备保全部
驱动器更换步骤
下传程序
下传程序;
一期机械:
技 术 员:张广西
包机组长:李继锋 成 员:耿明海、陈林、张广智、吴百勇、
AB不同型号的驱动器伺服电机如何 更换 项目 6月 7月 8月 9月 10月 11月 12月
创新提报 Sop标准化 内部培训 KYT活动 19
3 2 2
合计 19
设备三科-荣敦邦
山东金宇轮胎有限公司
ab伺服驱动器说明书

ab伺服驱动器说明书一、AB伺服驱动器简介AB伺服驱动器是一款高性能的伺服控制系统,广泛应用于各种工业自动化领域。
它由先进的控制器、驱动器和电机组成,共同实现对设备的精准控制。
AB伺服驱动器具有高可靠性、高响应速度和精确控制等特点,为用户带来高效、稳定的运行效果。
二、AB伺服驱动器的主要特点1.高性能:AB伺服驱动器采用先进的控制算法,实现了快速、精确的控制性能,满足各种复杂工况的需求。
2.高可靠性:AB伺服驱动器在设计上注重产品的可靠性和耐用性,确保长时间稳定运行。
3.宽泛的适用范围:AB伺服驱动器可应用于各种工业领域,如数控机床、机器人、输送线等。
4.易于调试和维护:AB伺服驱动器具备友好的用户界面,使调试和维护工作更加便捷。
5.节能环保:AB伺服驱动器采用高效电机,降低了能耗,有助于实现绿色生产。
三、AB伺服驱动器的应用领域1.数控机床:AB伺服驱动器可实现对刀具、工作台的精准控制,提高加工精度。
2.机器人:AB伺服驱动器在机器人领域的应用,可提高机器人的运动精度和响应速度。
3.输送线:AB伺服驱动器可控制输送线的运行速度和转向,提高物料输送效率。
4.风力发电:AB伺服驱动器在风力发电领域的应用,有助于提高风机的发电效率和稳定性。
5.太阳能发电:AB伺服驱动器可实现对太阳能设备的精准控制,提高太阳能发电效率。
四、AB伺服驱动器的使用与调试方法1.在使用AB伺服驱动器前,请仔细阅读说明书,了解产品性能、参数和接线方法。
2.按照电路图进行接线,确保接线正确无误。
3.调试过程中,可通过上位机监控系统实时了解设备运行状态,如电流、速度、位置等。
4.根据实际需求调整参数,如PID参数、速度限制等,以实现最佳控制效果。
5.定期检查AB伺服驱动器的运行状况,如发现异常,及时进行维修和调整。
五、总结与展望AB伺服驱动器以其优秀的性能、广泛的应用领域和便捷的使用方法,赢得了广大用户的一致好评。
随着工业自动化技术的不断发展,AB伺服驱动器将在更多领域发挥更大的作用。
之山伺服ZSD ZD AB系列说明书
图 -2 上位机通讯连接端子(面对插头的焊片看)
.3.2 CN1 功能描述
控制方式简称: P代表位置控制方式 S代表速度控制方式 表 .2 上位机通讯连接端子 CN1 功能描述
引脚号 信号名称
功能描述
输入输出方式
1
COM
输入 IO 电源,用来驱动输入 IO 的光耦, DC1212 V,电流大于 100mA
交流伺服驱动器
54321 10 9 8 7 6 15 14 13 12 11
图 -3 电机编码器连接端子(面对插头的焊片看) . .2 CN2 功能描述
表 .3 电机编码器连接端子 CN2 功能描述
端子号 6
1
2 3
5 10 15 1 9 13 8 12 2 11
信号名称
电源输出
电源地
编码器A+输入 编码器A-输入 编码器B+输入 编码器B-输入 编码器Z+输入 编码器Z-输入 编码器U+输入 编码器U-输入 编码器V+输入 编码器V-输入 编码器W+输入 编码器W-输入
参数 湿度 运行温度 存储温度 标高 振动 空气环境
警告 条件
≤90% (不冷凝) 0 ~ 0℃(不结霜)
- 0 ~ 55°С 海拔 1000m 以下 小于0.5G( .9m/s 2 )10-60HZ(非连续运行) 无腐蚀性、易燃性气体、无油雾
2
杭州之山科技有限公司
2 产品检查与型号说明
交流伺服驱动器
2.1 产品检查
为了防止本产品在购买与运输过程中的疏忽,请详细检查以下列出的项目: a. 是否是所欲购买的产品:分别检查电机与驱动器上的产品型号。 b. 电机轴是否运转平顺:用手分别逆时针和顺时针旋转电机转轴,如果可以平顺运转, 代表电机转轴是正常的。 c. 外观是否有损伤:目视检查是否有外观上的任何损坏,是否有松脱的螺丝。 d. 检查是否有任何组件的缺失。 完整的伺服组件包括: 1)1 台伺服驱动器及 2 台伺服电机; 2)电机动力线(U、V、W、PE)2 根; 3)电机编码器线 2 根; )伺服驱动器说明书。 5)电源线 1 根 如果有任何以上的情形发生,请与我们联系以获得妥善解决。
DELTA ASDA-B系列 标准泛用型伺服驱动器 应用技术手册

感謝您使用本產品,本使用操作手冊提供 ASDA-B 系列伺服驅動器與 ECMA 系列伺服電機 的相關信息。內容包括: 伺服驅動器和伺服電機的安裝與檢查 伺服驅動器的組成說明 試運行操作的步驟 伺服驅動器的控制功能介紹與調整方法 所有參數說明 通訊協議說明 檢測與保養 異常排除 應用實例解說 本使用操作手冊適合下列使用者參考: 伺服系統設計者 安裝或配線人員 試運行調機人員 維護或檢查人員 在使用之前,請您仔細詳讀本手冊以確保使用上的正確。此外,請將它妥善放置在安全的地 點以便隨時查閱。下列在您尚未讀完本手冊時,務必遵守事項: 安裝的環境必須沒有水氣,腐蝕性氣體與可燃性氣體。 接線時,禁止將三相電源接至電機 U、V、W 的接頭,因為一旦接錯時將損壞伺服 驅動器。 接地工程必須確實實施,接地時須遵照國家現行相關電工法規的規定施行(請參考 NFPA 70: National Electrical Code, 2005 Ed.)。 在通電時,請勿拆解驅動器、電機或更改配線。 在通電運作前,請確定緊急停機裝置是否隨時啟動。 在通電運作時,請勿接觸散熱片,以免燙傷。 如果您在使用上仍有問題,請咨詢經銷商或者本公司客服中心。
第三章
3.1
............................................................................ 3-1 3.1.1 週邊裝置接線圖 ........................................................................................ 3-1 3.1.2 驅動器的連接器與端子 ............................................................................. 3-2 3.1.3 電源接線法 .............................................................................................. 3-3 3.1.4 電機 U、V、W 引出線的連接器規格......................................................... 3-4 3.1.5 編碼器引出線連接器規格 .......................................................................... 3-6
伺服电机驱动器使用说明书
版权声明北京和利时电机技术有限公司保留所有权力说明书的内容参照了相关法律基准和行业基准。
使用产品时,如对本说明书提供的内容有疑问,请向购买产品的销售人员咨询,或致电客户服务热线,或致信本公司邮箱。
由于产品的不断更新升级,和利时电机保留在不事先通知的情况下,修改本手册中的产品和产品规格参数等文件的权利,提示客户请使用最新版本的说明书。
和利时电机具有本产品及其软件的专利权、版权和其它知识产权。
未经许可,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
和利时电机具有本说明书的著作权,未经许可,不得修改、复制说明书的全部或部分内容。
版本号 07/2015目录产品概要产品特性 (1)型号命名 (1)产品组成 (1)产品铭牌 (2)技术特性 (2)外形尺寸及重量 (4)安装和接线使用和储运环境 (6)安装注意事项 (6)电源端子-接线与配线 (7)编码器反馈连接器CN3 -接线与配线 (8)电机绕组-接线与配线 (8)接线与配线示意图 (9)输入输出连接器CN2 -接线与配线 (10)通讯连接器CN1 -接线与配线 (15)试运行和操作通电前注意事项 (16)操作和显示 (16)运行设定操作流程JOG试机运行 (20)内部速度模式运行 (21)外部速度模式运行 (22)位置模式运行 (22)转矩模式运行 (23)参数汇总说明参数分类描述 (24)控制参数修改要求 (24)D 状态监控参数 (24)F 控制参数 (25)运行和调整运行前检查 (32)增益调整 (32)故障和解决方法故障显示和解决方法对照表 (33)产品概要MSE 系列伺服驱动器以美国TI 公司最新的32位数字处理芯片(DSP )作为核心控制,采用了先进的全数字电机控制算法,完全以软件方式实现了电流环、速度环、位置环的闭环伺服控制,具备良好的鲁棒性和自适应能力,可配合多种规格的伺服电机,适应于需要快速响应的精密转速控制与定位控制的应用系统,如:数控机床、印刷机械、包装机械、造纸机械、塑料机械、纺织机械、工业机器人、自动化生产线等。
ab伺服驱动器说明书

ab伺服驱动器说明书
摘要:
一、ab 伺服驱动器简介
二、伺服驱动器的安装与接线
三、伺服驱动器的操作与调试
四、伺服驱动器的维护与故障排除
五、总结
正文:
ab 伺服驱动器是一款高性能、高精度的伺服驱动器,可广泛应用于工业自动化领域。
本文将详细介绍ab 伺服驱动器的使用方法及注意事项。
一、ab 伺服驱动器简介
ab 伺服驱动器是一种以电子方式控制交流电机转矩和转速的设备,通过接收外部控制信号,实现对电机的精确控制。
它具有响应速度快、精度高、可靠性好等特点,能满足各种工业自动化设备的运动控制需求。
二、伺服驱动器的安装与接线
1.安装环境:伺服驱动器应安装在通风、干燥、无腐蚀性气体的环境中,避免阳光直射和雨淋。
2.接线:根据电机型号和电源参数,正确连接伺服驱动器与电机、电源之间的接线。
三、伺服驱动器的操作与调试
1.开机:按照说明书要求,接通电源,启动伺服驱动器。
2.参数设置:根据实际需求,设置伺服驱动器的各项参数,如速度、加速度、位置等。
3.调试:通过外部控制设备,给伺服驱动器发送控制信号,观察电机运行情况,调整参数以达到预期效果。
四、伺服驱动器的维护与故障排除
1.定期检查:检查伺服驱动器运行声音、温度等,确保正常运行。
2.故障排除:如发现故障,应立即停机检查,根据故障现象,分析原因,采取相应措施进行处理。
五、总结
ab 伺服驱动器是一款优质的产品,具有出色的性能和稳定性。
AB伺服手册

安装说明Kinetix 3 组件伺服驱动器(目录号 TL-A110、-A120、-A130、-A220、-A230、-A2530、-A2540、A310 和 -A410)本出版物提供了 TL 系列电机的安装说明。
如果您负责安装这些 Allen-Bradley® 电机产品,请阅读本文档。
请在安装电机前阅读所有说明。
主题参见页码收货和存储 2环境防护等级 2工作温度和轴材料 3电机目录号标识 4准备安装电机 5电机安装和维护指南 5 延长电机寿命 6对电机轴进行机械连接7安装电缆8预防电噪声8使用轴密封件9安装 TL 系列电机9电机负载力额定值11连接器数据13安装尺寸15公制框架16NEMA 框架18拆卸和安装轴键20附件21相关文档232 TL 系列伺服电机安装说明收货和存储从货运公司收到货物时,客户负责检查设备。
对照订单检查收到的物品。
如有任何运输损坏或物品丢失,请立即通知承运商。
在满足以下环境条件的清洁干燥处存储电机:环境条件说明存储温度-10°至 85° C (14°至 185° F)相对湿度20% 至 85%,无凝露大气无腐蚀性环境防护等级根据防护标准 (IP 等级) 的相应环境保护等级,TL 系列电机、连接器和散头引线的符合性如下。
TL 系列电机等级说明1带可选轴密封件的电机2IP65防尘,防喷水不带轴密封并且按照以下方向安装的电机:轴朝下轴水平轴朝上IP53IP51IP50防尘,防溅水防尘,防垂直滴落的水滴防尘,无特殊防潮功能散头引线和连接器IP30防止直径大于 12.5 mm (0.5 in.) 的物体进入,无特殊防潮功能1 IP 等级说明仅供参考。
欲了解更完整的等级说明,请参见相关国际标准。
2 要达到 IP65 防护等级,需要使用可选的轴密封套件。
请参见第 21 页的附件。
TL 系列伺服电机安装说明3工作温度和轴材料条件或材料说明工作温度0°至 40° C (32°至 104° F)轴材料碳钢轴键材料碳钢4 TL 系列伺服电机安装说明电机目录号标识工厂指定选项AA = 标准AN = NEMA 安装法兰 / 轴抱闸2 = 无抱闸4 = 24VDC 抱闸连接器3 = 带连接器的散头引线,30cm外壳 / 轴键 / 轴密封J = IP65 外壳 / 轴键 / 无轴密封K = IP65 外壳 / 无轴键 / 无轴密封反馈B = 17位,带备用电池的多圈绝对编码器(无电池时为单圈)额定转速M = 4500 rpmP = 5000 rpm永磁叠片长度标识符法兰尺寸公制电机的安装螺栓圆周直径或 NEMA 尺寸1 = 46 mm 或 NEMA 17 3 = 100 mm2 = 70 mm 或 NEMA 234 = 115 mm25 = 90 mm 或 NEMA 34电压额定值A = 230 VAC系列标识符TL = 低惯量TL 系列伺服电机安装说明5准备安装电机1. 从货运箱中小心取出电机。
伺服驱动器使用说明书

MMT-直流伺服驱动器使用手册济南科亚电子科技有限公司直流伺服驱动器使用说明书一、概述:该伺服驱动器采用全方位保护设计,具有高效率传动性能:控制精度高、线形度好、运行平稳、可靠、响应时间快、采用全隔离方式控制等特点,尤其在低转速运行下有较高的扭矩及良好的性能,在某些场合下和交流无刷伺服相比更能显示其优异的特性,并广泛应用于各种传动机械设备上。
二、产品特征:◇PWM控制H桥驱动◇四象限工作模式◇全隔离方式设计◇线形度好、控制精度高◇零点漂移极小◇转速闭环反馈电压等级可选◇标准信号接口输入0--±10V◇开关量换向功能◇零信号时马达锁定功能◇上/下限位保护功能◇使能控制功能◇上/下限速度设定◇输出电流设定功能◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能三、主要技术参数◇控制电源电压AC:110系列:AC :110V±10%220系列:AC :220V±10%◇主电源电压AC:110系列:AC 40----110V220系列:AC50---- 220V◇输出电压DC:110系列:0—130V或其它电压可设定220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最大输出电流10A)DC 10A(最大输出电流15A)DC 20A(最大输出电流25A)◇控制精度:0.1%◇输入给定信号:0—±10V◇测速反馈电压:7V/1000R 9.5V/1000R13.5V/1000R 20V/1000R可经由PC板内插片选定并可接受其它规格订制四、安装环境要求:◇环境温度:-5ºC ~ +50ºC◇环境湿度:相对湿度≤80RH。
(无结露)◇避免有腐蚀气体及可燃性气体环境下使用◇避免有粉尘、可导电粉沫较多的场合◇避免水、油及其他液体进入驱动器内部◇避免震动或撞击的场合使用◇避免通风不良的场合使用五、电源输入说明该驱动系统分两路电源输入:即U1、V1为主电源输入,U2、V2为控制电表1注:1、驱动器的主电源(即U1 V1)独立供电时,若电源开路时,驱动器会报警(面板上的T.F灯亮)待故障排出后,驱动器自动回复正常。
伺服驱动器中文说明书
1.系统描述...................................................................................................................................- 3 -1.1系统布局图.......................................................................................................................................................- 4 -1.2基本原理...........................................................................................................................................................- 5 -1.3设备说明...........................................................................................................................................................- 6 -1.3.1电动缸DEMxB...........................................................................................................................................- 6 -1.3.2接线盒和电缆..........................................................................................................................................- 8 -1.3.3ACV9BR伺服驱动器...............................................................................................................................- 10 -2.技术规格....................................................................................................................................- 16 -2.1电动缸特性.....................................................................................................................................................- 16 -2.2伺服驱动器的技术特性.................................................................................................................................- 18 -2.3附属设备的技术规格.....................................................................................................................................- 20 -2.3.1主电源变压器........................................................................................................................................- 20 -2.3.2再生电阻RRC.........................................................................................................................................- 20 -2.3.3外部过滤器EFBR...................................................................................................................................- 21 -3.安装和接线.............................................................................................................................- 22 -3.1电动缸在塞棒机构上的安装.........................................................................................................................- 22 -3.1.1塞棒机构的准备....................................................................................................................................- 22 -3.1.1.1 塞棒机构固定件的图纸.....................................................................................................................- 22 -3.1.1.2 DEM电动缸在塞棒机构上的正确安装..............................................................................................- 23 -3.1.1.3塞棒机构间隙和阻力的检查..............................................................................................................- 24 -3.1.2电动缸的安装........................................................................................................................................- 26 -3.1.3塞棒的安装............................................................................................................................................- 27 -3.1.4隔热保护................................................................................................................................................- 28 -3.2.1接线盒JB9BR的安装说明.....................................................................................................................- 30 -3.2.2电缆说明................................................................................................................................................- 30 -3.2.3接线推荐规范和CE标准.......................................................................................................................- 32 -3.2.3.1 屏蔽线的接地.....................................................................................................................................- 32 -3.2.3.2 内部金属导体之间的连接.................................................................................................................- 32 -3.2.3.3 接线盒内的电缆连接.........................................................................................................................- 33 -3.2.3.4 驱动器侧的电缆连接.........................................................................................................................- 34 -3.2.4热区电缆的连接....................................................................................................................................- 35 -3.3驱动器ACV9BR的安装和接线.......................................................................................................................- 36 -3.3.1尺寸........................................................................................................................................................- 36 -3.3.2安装、定位和冷却................................................................................................................................- 37 -3.3.3电源的连接............................................................................................................................................- 39 -4.操作........................................................................................................................................- 40 -4.1手动模式.........................................................................................................................................................- 40 -4.2远程工作模式.................................................................................................................................................- 41 -4.3自动模式.........................................................................................................................................................- 41 -4.4塞棒关闭和安全装置.....................................................................................................................................- 42 -4.4.1塞棒关闭................................................................................................................................................- 42 -4.4.2断开电机电源(可选项).....................................................................................................................- 42 -4.5运行故障的处理.............................................................................................................................................- 43 -5.维护........................................................................................................................................- 44 -5.1检查周期.........................................................................................................................................................- 44 -5.2电动缸的检查和维护.....................................................................................................................................- 45 -5.3推荐的备件.....................................................................................................................................................- 49 -5.4伺服驱动器的故障代码.................................................................................................................................- 53 -5.5故障的数字输出代码.....................................................................................................................................- 57 -5.6驱动器复位和状态显示.................................................................................................................................- 58 -5.7没有报警显示时的故障排除.........................................................................................................................- 59 -6.辅助设备.................................................................................................................................- 61 -6.1DEM系列电动缸的测试台..............................................................................................................................- 61 -6.2塞棒机构MQS..................................................................................................................................................- 61 -1.系统描述SERT的塞棒执行器系统用于控制塞棒和塞棒机构的位置,以控制流入结晶器的钢水的流量。
DC20P2B1-A伺服门机驱动系统快速手册

目录一、驱动器的接线 (1)二、操作与显示界面 (3)三、快速调试 (4)四、参数列表 (9)⏹P1.基本参数 (9)⏹P2.工艺参数 (9)⏹P3.速度参数 (10)⏹P4.时序参数 (10)⏹P5.扭矩参数 (10)⏹U2.端子监视 (11)⏹U3.故障记录 (12)⏹U4. 当前故障信息记录 (12)◆OP:系统操作参数 (13)五、运行中快速调整 (14)六、故障列表与解决方法 (16)⏹电机自学习失败 (17)⏹.参数不合理 (17)一、驱动器的接线1.1驱动与控制回路端子分布与配线控制信号输入与门状态输出端子CN1二、操作与显示界面用户通过操作面板可对DC4门机控制器进行运行停止、参数修改、状态监视与测试运行控制等操作3模式、数据显示操作键通讯端口状态灯图2-1操作面板界面表2-1操作面板按键功能介绍表处于参数监视选择界面时,右下角小数点闪烁表示该项为正在修改的参数代码项。
处于参数设定界面时,数值闪烁表示该项为正在修改的设定值项。
重要三、快速调试DC4门机控制器采用闭环控制,通过编码器学习门宽距离,需要进行电机自学习操作,采用参数设置配合内部计算控制减速点与到位。
3.1、电机参数调谐产品配套电机为交流永磁同步电机,使用前必须先进行电机调谐,学习电机磁角度。
若使用中产品因故障需更换驱动器或电机,请重新进行电机调谐。
调谐流程如图3-1所示:(1)检查外围接线且确保驱动器处于非运行状态;(2)编码器信号检查:查看U2.06参数,用手将轿门移动至门中部同时观察数值是否0~4096连续循环变化。
(3)控制器上电后通过操作面板设置OP3=3执行动态电机磁角度调谐操作,电机将带动轿门轻微动作同时面板上显示调谐电流,当操作面板不再显示电流数值后完成调谐。
图3.1 电机调谐流程图3.2、全闭环位置控制介绍全闭环位置控制需要在首次运行前正确自学习门宽距离,通过设置开、关门曲线的参数实现加减速控制和到位的处理。
台达dps150ab5b说明书

台达dps150ab5b说明书当机械设备开始运转前,须配合其使用者参数调整设定值。
若未调整到相符的,正确设定值,可能会导致机械设备运转失去控制或发生故障。
机器开始运转前,请确认是否可以随时启动紧急停机装置。
当电机运转时,禁止接触任何旋转中的电机零件,否则可能会造成人员受伤。
为了避免意外事故,请先分开机械设备的连轴器及皮带等,使其处于单独的状态,再进行第一次试运转。
在伺服电机和机械设备连接运转后,如果发生操作错误,则不仅会造成机械设备的损坏,有时还可能导致人身伤害。
强烈建议:请先在无负载情况下,测试同服电机是否正常运作,之后再将负载接上,以避免不必要的危险。
在运转中,请不要触摸伺服驱动器的散热片,否则可能会由于高温而发生烫伤。
禁止接触伺服驱动器及同服电机内部,否则可能会造成触电。
电源启动时,禁止拆下驱动器面板,否则可能会造成触电。
电源关闭10分钟内,不得接触接线端子,残余电压可能造成触电。
不得拆开伺服电机,否则可能会造成触电或人员受伤。
不得在开启电源情况下改变配线,否则可能造成触电或人员受伤。
只有合格的电机专业人员才可以安装、配线及修理保养伺服驱动器以及同服电,机安装方向必须依规定,否则会造成故障原因。
为了使冷却循环效果良好,安装交流伺服驱动器时,其上下左右与相邻的物品和挡板(墙)必须保持足够的空间,否则会造成故障原因。
交流伺服驱动器在安装时其吸、排气孔不可封住,也不可倾倒放置,否则会造成故障。
安装注意事项:1、检查R、S、T(L1M、L2M)与L1、L2的电源和接线是否正确。
2、确认同服电机输出U、V、W端子相序接线是否正确,接错电机可能不转或乱转。
3、使用外部回生电阻时,需将P、D端开路、外部回生电阻应接于P、C端,若使用内部回生电阻时,则需将P、D端短路且P、C端开路。
4、异警或紧急停止时,利用ALARM或是WARN输出将电磁接触器(MC)断电,以切断伺服驱动器电源。
5、在110V机种,已将三相电源标示法R改为L1M,S改为L2M,成为单相入电,其原先T相入电位置已无任何作用(无回路)。
ab6000伺服驱动器说明书

ab6000伺服驱动器说明书尊敬的用户:感谢您选择 AB6000 伺服驱动器。
以下是 AB6000 伺服驱动器的说明书,希望它能为您提供帮助。
正文:1. 概述AB6000 伺服驱动器是一款高性能、高可靠性的伺服驱动器,适用于各种高精度、高速度、高加速度的伺服应用。
AB6000 采用全数字化控制技术,具有高速响应、快速调节、高效节能等优点。
2. 主要功能AB6000 伺服驱动器的主要功能包括:- 高速响应:能够快速响应指令,实现高精度、高速度、高加速度的控制。
- 快速调节:能够快速调节电机速度、位置等参数,实现快速响应。
- 高效节能:采用数字化控制技术,能够高效地控制电机,降低能耗,节省能源。
- 多种通讯接口:具有 RS232、RS485、TCP/IP 等多种通讯接口,方便与控制系统进行通讯。
- 手动/自动切换:能够在手动和自动模式之间进行切换,满足各种应用需求。
3. 参数设置AB6000 伺服驱动器的参数设置非常重要,直接影响驱动器的性能。
用户可以根据实际需求进行参数设置,包括:- 电机参数:包括电机类型、电机功率、电机速度等参数。
- 控制模式:包括 PID 控制、模糊控制、直接转矩控制等模式。
- 增益参数:用于控制电机的速度和加速度,可以根据实际需求进行调整。
- 其他参数:包括故障诊断、自动/手动切换等参数,用户可以根据实际需求进行调整。
4. 操作说明AB6000 伺服驱动器的操作非常简单,用户只需要按照以下步骤进行操作:- 连接驱动器:将驱动器与电机连接,并确保连接牢固。
- 设置电机参数:根据电机类型和功率设置电机参数。
- 设置控制模式:根据实际需求设置控制模式。
- 设置增益参数:根据电机的响应速度和实际需求设置增益参数。
- 启动驱动器:按下驱动器上的启动按钮,驱动器开始工作。
拓展:除了上述内容,AB6000 伺服驱动器还有许多拓展功能,包括:- 高速计数器:用于记录电机转速和位置,帮助用户进行数据分析和调试。
伺服ab相脉冲

伺服ab相脉冲是一对互补的正弦波,其相位差为90度。
它们用于驱动伺服电机,伺服电机是一种将电能转换成机械能的电动机。
伺服电机由定子和转子组成,定子是固定不动的,转子是可旋转的。
定子绕组中流过电流时,会产生一个旋转磁场,这个旋转磁场会带动转子旋转。
伺服ab相脉冲的作用就是控制转子的旋转速度和方向。
伺服ab相脉冲的频率决定了转子的旋转速度,脉冲的相位决定了转子的旋转方向。
当伺服ab相脉冲的频率为零时,转子将停止旋转。
当伺服ab相脉冲的频率越高,转子的旋转速度就越快。
当伺服ab相脉冲的相位为0度时,转子将正向旋转。
当伺服ab相脉冲的相位为180度时,转子将反向旋转。
伺服ab相脉冲的产生可以通过多种方式,最常见的方式是使用脉冲编码器。
脉冲编码器是一种将机械运动转换成电信号的传感器。
当脉冲编码器的转子旋转时,它会产生一组脉冲信号。
这些脉冲信号可以被伺服驱动器处理,并转换成伺服ab相脉冲。
伺服ab相脉冲在伺服电机中起着非常重要的作用,它决定了伺服电机的旋转速度和方向。
伺服ab相脉冲的产生可以通过多种方式,最常见的方式是使用脉冲编码器。
伺服ab相脉冲在工业自动化中有着广泛的应用,它被广泛用于机器人、数控机床、印刷机等设备中。
伺服ab相脉冲的应用为工业自动化带来了极大的便利,它提高了生产效率,降低了生产成本。
下面是一些伺服ab相脉冲的具体应用实例:在机器人中,伺服ab相脉冲用于控制机器人的关节运动。
伺服驱动器根据伺服ab相脉冲的频率和相位来控制关节的旋转速度和方向,从而实现机器人的各种动作。
在数控机床中,伺服ab相脉冲用于控制机床的刀具运动。
伺服驱动器根据伺服ab相脉冲的频率和相位来控制刀具的旋转速度和方向,从而实现机床的各种加工操作。
在印刷机中,伺服ab相脉冲用于控制印刷机的纸张输送速度。
伺服驱动器根据伺服ab相脉冲的频率和相位来控制纸张输送速度,从而实现印刷机的正常运行。
伺服ab相脉冲在工业自动化中有着广泛的应用,它为工业自动化带来了极大的便利,提高了生产效率,降低了生产成本。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AB伺服驱动器说明书
1. 引言
AB伺服驱动器是一种高性能的电机驱动设备,用于控制和调节电机的转速和位置。
本说明书将为用户提供关于AB伺服驱动器的详细信息,包括产品介绍、技术规格、安装指南、操作说明等内容。
2. 产品介绍
AB伺服驱动器是一种先进的电机控制设备,采用了先进的控制算法和高性能硬件
设计。
它可以实现精确的速度和位置控制,适用于各种工业应用领域。
2.1 主要特点
•高精度:AB伺服驱动器采用了高分辨率编码器和精确的反馈系统,可以实现非常精准的位置和速度控制。
•高响应性:AB伺服驱动器具有快速响应的特点,可以在瞬间完成转速或位置调整,并且具有良好的抗干扰能力。
•多功能:AB伺服驱动器支持多种工作模式和控制方式,可以满足不同应用场景的需求。
•易于使用:AB伺服驱动器配备了直观友好的用户界面,可以方便地进行参数设置和监控。
2.2 产品型号
AB伺服驱动器提供多种型号供用户选择,根据不同的功率和控制需求,用户可以
选用适合的型号。
•AB-1000:适用于小功率应用,最大输出功率为1000瓦特。
•AB-2000:适用于中等功率应用,最大输出功率为2000瓦特。
•AB-5000:适用于大功率应用,最大输出功率为5000瓦特。
3. 技术规格
AB伺服驱动器具有以下技术规格:
3.1 输入电源
•电源电压:AC220V/380V可选
•频率范围:50Hz/60Hz
3.2 输出能力
•最大输出电流:根据型号不同而不同
•最大输出转矩:根据型号不同而不同
3.3 控制方式
AB伺服驱动器支持以下控制方式: - 开环速度控制 - 闭环速度控制 - 开环位置
控制 - 闭环位置控制
3.4 通信接口
AB伺服驱动器支持多种通信接口,包括: - RS485接口 - CAN总线接口
4. 安装指南
在安装AB伺服驱动器之前,请务必仔细阅读以下安装指南,并按照指导进行操作。
4.1 安装位置
AB伺服驱动器应安装在干燥、无尘、无腐蚀气体的室内环境中,远离高温、高湿
和强电磁干扰的区域。
4.2 连接电源
根据伺服驱动器的输入电压要求,正确连接电源,并确保接线可靠牢固。
4.3 连接电机
将伺服驱动器与电机进行正确的连接,确保连接线路准确可靠,避免接触不良或接反。
4.4 参数设置
通过用户界面或通信接口,设置伺服驱动器的参数,包括控制模式、速度限制、位置偏移等。
5. 操作说明
本章将为用户提供有关AB伺服驱动器的操作说明和使用技巧。
5.1 启动和停止
在正确连接并设置好参数后,可以启动伺服驱动器。
通过控制界面上的启停按钮或通过通信接口发送相应命令来实现启停功能。
5.2 转速调节
通过控制界面上的转速调节按钮或通过通信接口发送相应命令,可以实现对伺服驱动器的转速进行调节。
5.3 位置控制
通过控制界面上的位置调节按钮或通过通信接口发送相应命令,可以实现对伺服驱动器的位置进行精确控制。
6. 故障排除
在使用AB伺服驱动器过程中可能会遇到一些故障情况,本章将为用户提供常见故
障排除方法和建议。
6.1 无法启动
如果伺服驱动器无法启动,请检查电源是否正常连接、电机是否正确连接以及参数设置是否正确。
6.2 转速不稳定
如果伺服驱动器的转速不稳定,请检查电源稳定性、反馈系统和编码器是否正常工作以及参数设置是否准确。
7. 维护与保养
AB伺服驱动器是一种精密设备,需要进行定期维护和保养,以确保其性能和寿命。
7.1 清洁
定期清洁伺服驱动器的外壳和散热风扇,确保通风畅通,并防止灰尘积累影响散热效果。
7.2 检查
定期检查伺服驱动器的连接线路和接口,确保连接可靠,并及时更换损坏的部件。
7.3 校准
定期校准伺服驱动器的参数和控制系统,确保其精确性和稳定性。
8. 注意事项
在使用AB伺服驱动器时,请务必注意以下事项:
•请遵循安装指南中的要求进行正确安装。
•请勿私自拆卸或改装伺服驱动器,以免影响其性能和安全性。
•在操作伺服驱动器之前,请确保已经仔细阅读并理解本说明书中的内容。
•如遇到故障或不明情况,请及时联系售后服务人员进行处理。
以上为AB伺服驱动器说明书的内容,希望能为用户提供全面、详细和深入的信息。
如有任何疑问或需要进一步了解,请联系我们的客户服务部门。
感谢您选择AB伺
服驱动器!。