用20PM运动控制器新版软件实现绕线机控制模块的编制
FX-20P-E型手持式编程器的使用方法.doc
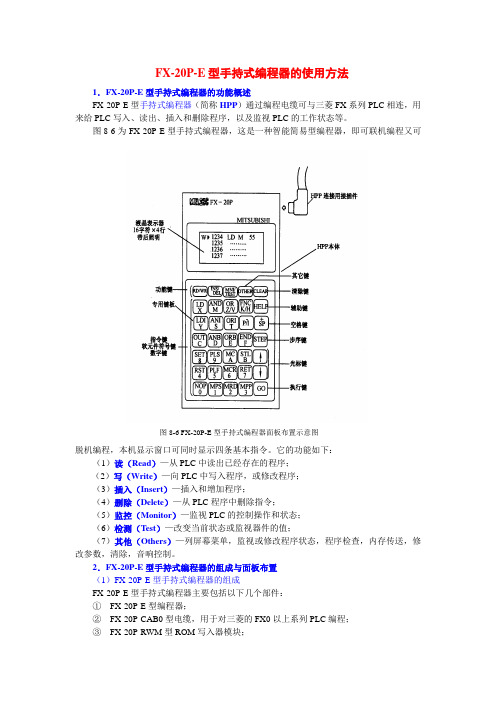
FX-20P-E型手持式编程器的使用方法1.FX-20P-E型手持式编程器的功能概述FX-20P-E型手持式编程器(简称HPP)通过编程电缆可与三菱FX系列PLC相连,用来给PLC写入、读出、插入和删除程序,以及监视PLC的工作状态等。
图8-6为FX-20P-E型手持式编程器,这是一种智能简易型编程器,即可联机编程又可图8-6 FX-20P-E型手持式编程器面板布置示意图脱机编程,本机显示窗口可同时显示四条基本指令。
它的功能如下:(1)读(Read)—从PLC中读出已经存在的程序;(2)写(Write)—向PLC中写入程序,或修改程序;(3)插入(Insert)—插入和增加程序;(4)删除(Delete)—从PLC程序中删除指令;(5)监控(Monitor)—监视PLC的控制操作和状态;(6)检测(Test)—改变当前状态或监视器件的值;(7)其他(Others)—列屏幕菜单,监视或修改程序状态,程序检查,内存传送,修改参数,清除,音响控制。
2.FX-20P-E型手持式编程器的组成与面板布置(1)FX-20P-E型手持式编程器的组成FX-20P-E型手持式编程器主要包括以下几个部件:①FX-20P-E型编程器;②FX-20P-CAB0型电缆,用于对三菱的FX0以上系列PLC编程;③FX-20P-RWM型ROM写入器模块;④FX-20P-ADP型电源适配器;⑤FX-20P-CAB型电缆,用于对三菱的其他FX系列PLC编程;⑥FX-20P-FKIT型接口,用于对三菱的F1、F2系列PLC编程。
其中编程器与电缆是必须的,其它部分是选配件。
编程器右侧面的上方有一个插座,将FX-20P-CAB0电缆的一端输入该插座内(见图8-6),电缆的另一端插到FX0系列PLC的RS-422编程器插座内。
FX-20P-E型编程器的顶部有一个插座,可以连接FX-20P-RWM型ROM型写入器,编程器底部插有系统程序存储器卡盒,需要将编程器的系统程序更新时,只要更换系统程序存储器即可。
可编程控制器――FX-20P-E手持编程器的使用教案
可编程控制器――FX-20P-E手持编程器的使用
可编程控制器――
FX-20P-E手持编程器的使用
【教材分析】
教学重点:通过实际操作,初步掌握常用指令的清除、写入、删除、插入、检索等操作方法。
【学习目标】
1、知识目标:熟悉手持编程器面板各按键的功能,掌握常用的操作方法。
2、能力目标:能够利用手持编程器对指令进行各项操作,即指令的清除、写入、删除、插入、检索等操作方法。
3、情感目标:学生通过小组讨论,探究、归纳,用大量的操作实践掌握手持编程器的常用操作方法,在整个学习过程中培养自主性、协作性的学习行为和克服困难的精神。
【课前准备】
工具、器材和教具
1、FX0N-40MR主机及FX-20P-E手持编程器各一台
2、实物投影仪一台
【说明】
本教案中的黑体字为板书用,斜体字为讲课提示用。
台达20PM在8-12轴继电器线圈线机中的应用
台达20PM在8-12轴继电器线圈绕线机中的应用【摘要】介绍台达DVP-20PM00M运动控制器电子凸轮(CAM)功能,螺旋插补指令运用,总结绕制继电器线圈的几个特殊步骤及难点,以及相关工艺要求及相关控制程式概要。
【關鍵字】20PM运动控制器,电子凸轮,CAM Table,螺旋插补,继电器线圈,缠脚功能【前言】本文介绍的绕线机系统,是绕线系统中的一种,绕线机的市场庞大,品种繁多,有平行绕线机、环型绕线机、定转子绕线机、纺织绕线机,无骨架绕线机,有骨架绕线机等。
本文主要介绍的是利用中达PLC 20PM电子凸轮功能,数控功能为核心构建出的控制:继电器线圈绕线机,【正文】一、设备一般结构图2如上图示意,该绕线机构主要控制四个轴,主轴是旋转轴,由20PMOOM的扩展定位模块01PU给伺服驱动器发一200K的脉冲,通过机械结构带动12个旋转轴旋转运动,同时,把这个命令信号接到20PM00M的脉冲输入端,作为X轴的主轴信号,X轴为排线轴,是从轴。
X轴控制伺服驱动器跟随主轴做来回排线动作,也是通过机械结构使12个旋转轴整体前后来回排,用的是电子凸轮功能。
排线完毕,需要进行一些其他气缸动作,这里就不做赘述,关键的一点是还要进行一个缠脚动作,这是所有继电器线圈绕制都需要的工作,需要用到,XYZ螺旋插补功能。
X轴是控制机座整体由人对机器方向前后方向,Y轴运行方向,是人对机器方向左右方向,Z轴为上下方向。
下面重点介绍两个主要功能的实现方法,一是绕排线功能,也即是电子凸轮功能二是缠脚功能,也即是三轴螺旋插补功能。
完成这两个主要功能,也就实现了整个继电器线圈的绕制。
二绕排线控制及20PM运动控制器电子凸轮功能应用介绍如上图所示,这是任何绕线机都相同的动作,绕线转轴不停旋转达到设定匝数停止,往复运动轴通过线径,盘宽的设置,按照生成的电子凸轮曲线,来回运动。
生成的电子图形如下图生成来回排线凸轮曲线的方法是通过指令写入CAM表下图为根据工艺计算出上图几个主从轴数据,总共为三个点,三个主轴数据对应三个从轴数据转化为实数放到对应的D4200开始的数据区然后写入CAM0表里,M496闭合为写表指令,M407指令为刷新指令,然后通过离合电子凸轮把D1846设成H2000,在通过设定01PU的运转速度,及运转位置,就可执行绕线功能以上是一般绕线机的通用功能,但是对于继电器线圈绕制有个特殊的要求,即后续为了缠脚方便,必须保证在总匝数不变的情况下,最后从轴位置一定要停在起始边或对边。
20PM导入G代码功能心得体会

20PM导入G代码功能心得体会一、引言:用20PM00M做三轴控制,通过G代码控制三轴伺服实现运行客户图标轨迹的功能。
以下就操作步骤做了简单说明,侧重了外围软件的操作。
希望能使各位同仁在对20PM的G代码导入功能的实现上减少摸索的时间。
二、客户要求:控制三轴伺服电机运行,实现下图的绘制。
图一图标三、功能实现:(一)、所需软件1、PMSoft 1.03DVP20PM00M编程软件2、PMsimu 1.03 DVP20PM00M模拟运行软件3、AutoCAD 2007绘图软件4、燕秀工具箱2.7AutoCAD2007外挂5、Mastercam X将AutoCAD2004图形转换为G代码软件(二)、实现步骤1、根据预计绘制大小,用AutoCAD 2007绘制图形。
需要注意点:根据三轴伺服的原点位置、及运行方向确定图形所在象限。
坐标的确定需要根据客户机械结构;客户对三轴正向极限、反向极限、原点信号的定义等因素来决定。
例:在此处箭头所指方向为X轴、Y轴、Z轴运行的正方向,三轴交会处为坐标原点,则在用AutoCAD做平面图时需要将图形画在第四象限。
ZXY图二原点及正方向确认图三确定坐标后的图形2、用燕秀工具箱的文字分解功能将汉字及英文字母分解为线条。
AutoCAD本身没有将汉字及英文字母分解为线条的功能,在网上可以搜到一些AutoCAD的外挂实现该功能。
我下载了燕秀工具箱来完成该功能。
图四燕秀工具箱文字分解功能使用经过文字分解后如如下图。
图五文字分解后图形将多余线条删除后得到最终图形图六最终图形将文件另存为AutoCAD2004版本。
3、用Mastercam X将图形转换为G代码。
1>打开Mastercam X文件,导入AutoCAD2004图形。
文件类型选择AutoCAD文件。
图七导入AutoCAD2004图形2>调整适合屏幕大小,使图形显示出来。
适合屏幕大小图八调整图形显示范围3>选择铣床图九选择铣床4>选择刀具路径图十选择刀具路径5>选好刀具路径后,会跳出下图选择3D,选择窗选,然后在画面上将图形选择后确定。
绕线机操作规程
绕线机操作规程一、开机前的准备工作绕线机开机前要仔细检查绕线机工作台上有无杂物,绕线机上的螺丝有无松动,电源开关有没有连接好,漆包线的规格是否符合要求.确认合格才能开机。
二、绕线机参数设置将控制台上的红色按钮按箭头所指方向转动,绕线机开机并自动复位,此时要根据生产安排设置好绕线机参数.按微电脑控制器上的“设定”按钮,依屏幕上的提示依次输入“程序号”、“线圈数”、“线径"、“绕线匝数”、“预停圈数”、“起绕点”、“绕线宽度”、“过槽宽度”、“停机角度"、“绕线方向"等参数,最后按“确认"键确认,机器存入数据并自动复位,参数设置完成.接着调整微电脑控制器左侧的绕线机工作方式,依次设定为“后端定位”、“标准排线”、“自动复位”,最后按“待机”键,机器自动复位进入自动绕线模式。
三、空运行检查绕线机参数设置完成后,还不能马上绕线,必须确认绕线机的设置完全符合要求才能绕线。
先空车运行一遍,注意检查绕线机的排线、绕线匝数、复位方式、停车位置等是否符合要求,如不符合要求,必须重复以上的步骤,重新调整,直至达到要求为止。
四、上线将符合要求的漆包线盘平稳放置于托架上,罩上塑料套筒和筒盖,线从筒盖上的瓷嘴穿出,依次通过导线嘴、毛毡、导线轮、活动线架,最终从活动线架的铜轮引出.五、绕线将上好端子的线框架穿到绕线机的专用定位模上,漆包线缠在底线端子上,检查漆包线有没有出导线轮,如果一切正常,按下红色“起动"键,开始绕线。
如中间出现异常情况,要立即按下绕线机上的“停止”键,停机检查,排除故障后,按“起动”键继续绕线。
注意事项:1、操作者一定要注意安全,机器开动后,手不能靠近转动部分,需要调整时,必须先停机,后调整,调整完成后必须确认手已离开危险区域才可重新开机。
2、操作者工作时不能戴手套,衣袖不能太长,女操作工头发长的要扎起或扎起后放在安全帽内。
3、绕好线后,要检查底线和面线是否接在对应的端子上;底线和面线与端子接线处是否留有足够松位;面线是否贴近线框架出线;线圈绕制有没有出现锥形;表面有没有碰伤或压痕,确认合格后,将线圈放在周转箱内,摆放时注意电源端子一定不能碰到线圈表面。
中达20PM教育训练资料_第二天

進入建立 CAM表按紐
將建立CAM 表資料匯到 系統安裝檔 將建立CAM表位置 資料匯到速度資料 以速度資料產生位 置資料及加速度資 料
將系統安裝檔裡 面CAM表資料匯 入進來
PMSoft建立CAM Data(續)
角度(Angle):主軸角度/位移 行程(Stroke):從軸角度/位移 凸輪曲線(CAM Curve):目前區段所使用的函數 解析度(Resolution):可設定範圍從10~2048點
運動控制主機 DVP20PM培訓資料
DVP20PM教育訓練大綱
第二天
7.電子凸輪功能 8.虛軸CAM By pass功能-多軸應用 9.電子凸輪曲線平滑功能 10.高速比較與捕捉功能
7.電子凸輪功能
7.1 機械凸輪與電子凸輪簡介
7.2 20PM運作流程與CAM表建立
7.2.1 使用PM-Soft建立 CAM表內容 7.2.2 DTO指令寫入建立CAM Data
(4) CAM Data (resolution 10~2048) 週期性 CAM啟動
同步訊號輸出
從軸 主軸
7.4 非週期凸輪
20PM
(1) 端子 極性
(2) 接收脈 主動輪脈 波型式 波輸入 設定 非週期CAM啟動 (3) 輸入 倍率 從動輪 脈波輸 出 (3) 輸出 倍率 (2) 輸出 波型
(4) CAM Data (resolution 10~2048) 非週期性 CAM致能
(4) 輸出 波型
(9)
(1) CAM Data (resolution 10~2048) (8) (7) 非週期性 或 週期性 CAM致能 CAM啟動
同步訊號輸出
輸出脈波波形 與伺服驅動器 設定要搭配
輸入倍率設定
20PM运动控制器实现多电子凸轮同步的应用

整个流程类似一个机械主轴,通过齿轮联结四个从轴凸轮轴,每个凸轮的形状根据具体产品不一样形状也,不一样 。
下面的图形是客户一种规格产品四个凸轮的轨迹。
虚拟主轴与上冲伺服的数据对应为
0 0
40 0
150 8000
180 70000
192 10000
300 0
360 0
虚拟主轴与母模伺服的数据为
用20PM运动控制器新版软件实现绕线机控制模块的编制
摘要:
本文主要介绍如何用台达20PM运动控制器新软件实现功能块的编制,并通过编制绕线机通用控制模块案例描述编程细节,从而使用户通过本文熟练使用功能块,编制其他典型行业的通用模块程序。减少重复性的劳动
关键字:台达20PM运动控制器凸轮功能CAM曲线同步虚拟主轴
由于输入凸轮的数据点比较少生成的曲线运行时会不太平滑,需要在设置的10个数据中加入设定的解析点,比如400点,三次曲线等。如下
D0=k10003迳建立平滑曲線
D101..100连主軸最大值
D102连原資料點數
D103连插值總點數
D104连平滑係數(3, 4, 5, 6次曲線, other 3次曲線)
上图为通过HMI输入母模凸轮与虚拟主轴的运动轨迹,其他四个数据通过同样途径输入,也可能有的产品用不到四个凸轮轴,只需把不用的从轴数据全设为0.然后通过主界面调用配方,点刷新按钮即可。
对应20PM程序里的相应数据寄存器里存入凸轮数据
每个20PM,都按此过程生成凸轮数据,
生成数据上载如下图
现在只要执行凸轮离合运行就可各个凸轮轨迹运转了。
二 高速冲压机结构和原理
1实际机械结构及外形
如上图所示分别有四个独立的轴,每个轴都有一个A系列3KW电机直联。
自动绕线机设计方案说明
自动绕线机设计方案说明一、绕线机工作原理:绕线机是用于切割硅单晶上的一种细合金钢丝,由于是在美国进口的大卷筒估计有50000米左右长(重量?),用在线切割机太大太重不能使用,在正常工作情况下只能使用小卷的合金钢丝筒,因此需要将大卷合金钢丝筒,卷成小的合金钢丝筒,小卷的合金钢丝筒约2500-5000米,(重量?)才能用于线切割机使用,合金钢丝直径为Ф0.31。
二、绕线机主要技术要求分析:1、由于合金钢丝直径只有Ф0.31mm比较细,而且合金钢丝本身比较硬,在绕制过程中拉紧容易断,绕松了容易跑而且排列不整齐,不符合工艺要求,2、在绕制过程中,绕线的速度不能太快,也不能太慢,启动或停止时,不能堵启、堵停刚好适应合金钢丝本身物理特性。
3、大卷的合金钢丝筒与小卷合金钢丝筒,在绕制合金钢丝过程中(过度轮1)与(过度轮2)垂直下拉转到小卷合金钢丝筒上,而且合金钢丝在小卷合金钢丝筒上从左到右,从右到左依次循环进行绕制,要保证绕线筒合金钢丝排列整齐,松紧适宜,传动部分必须采用高精度、转速恒定可调的步进电机、伺服电机。
由于精度高,转速恒定可调是通过内部的脉冲信号来控制与外部传感器信号来控制电机转速、起步、运行、停止等工作状态,才能满足工艺及技术要求。
三、绕线机设计方案:1、绕线机是根据客户公司提供有关绕线机加工工艺要求及技术要求来进行设计,根据以上工作原理主机控制均采用进口品牌欧姆龙、或西门子PLC可编程器、主要传动部分采用步进电机、伺服电机。
合金钢丝绕制过程中的张力松、紧信号采用张力传感器、计数频率采用旋转编码器,所有传感器采集的控制信号如速度、同步、张力、计数送到PLC进行运算,完成绕线机绕线工艺技术要求。
2、步进电机传动总成叫标准拖板固定安装在工作平台上,同时小卷合金钢丝筒传动总成,水平固定在步进电机传动总成标准拖板上,同步控制信号的采集是安装在2号传动轮上旋转编码器脉冲信号(转速),来控制小卷合金钢丝筒传动总成与步进电机传动总成的同步,方向控制信号由两边的接近开关分别进行控制左、右换向从而达到绕制过程同步。
F1-20P 编程器使用手册
(2) 当编程器置于基本单元上后,编程时,基本单元上的"运行/停机" 开关必须置于
"停机"位置,而编程器置于"编程"位置.而基本单元处于工作状态 或监视程序时.
编程器置"监视"位置,基本单元置于"运行"方式. (3) 当编程器置于编程状态时,基本单元由"停机"转成"运行"状态, 基本单元将不能
用于检查数据是否已被破坏.它包括程序存储器中的数据求和,
并检查这个和是否 保持不变. 求和检查的键盘操作如下:
[CLEAR]→[STEP]→[3]→[WRITE] 如果显示出错代码 3-1,则表示两次和的值之间有差异.
(4) 双重线圈检查 在某些情况下,同一元件的 OUT 指令被编写两次以上(称为双重线
注意:删除某些指令,如 LD AND ORB 等会改变电路的结构.
7. 程序检查 PC 处于"停止"状态 编程器处于"PROGRAM"状态
(1) 程序语法检查 键盘操作:
[CLEAR]→ [STEP]→[1]→[WRITE]→[STEP]→[INSTR] (2) 线路检查
键盘操作:
[CLEAR]→[STEP]→[2]→[WRITE]→[INSTR] (3) 求和检查
键盘操作: [CLEAR] [元件号] [MONITOR] → [8 或 S] <1>
↓→[9 或 S] <2> <1> 强制接通(一个扫描周期) <2> 强制断开(一个扫描周期) 此操作功能主要用于:对定时器,计数器强制复位,或者对它们的 输出强制接通 但在停机(STOP)方式下,定时器输出不能强制接通. 停机(STOP)时,PC 输出可强制接通.接通状态能保持,直到由强 制断开操作使其复 位(断开). 如果该线圈正在跳步,则不能强制接通或强制断开. (3) 指令监视 此操作功能可按步序号显示指令的接通或断开状态. 键盘操作如下: [CLEAR] [元件号] [SEARCH] [MONITOR] [STEP+/STEP-] (4) PC 运行时修改 T/C 常数
20PM运动控制器电子凸轮功能在高速绕线机的应用

台达20PM运动控制器电子凸轮功能在高速绕线机的应用摘要:介绍台达DVP-20PM00D运动控制器电子凸轮(CAM)功能,阐述高速绕线机工作原理、工艺要求及相关控制程式概要。
关键词:运动控制器,电子凸轮,伺服控制,绕制主轴,排线从轴,CAM Table,高速脉冲。
一、前言本文介绍的是全自动无骨架系列高速绕线机,可以绕制不同规格的空心线圈,如:传动线圈,扬声器线圈,天线线圈以及各种无骨架通用线圈。
设备具有性能可靠,高速高效率,自动化程度高,适合于线圈的大批量生产。
绕制各种线圈如下图:一般普通绕线机采用内置脉冲功能的小型PLC,通过绕线轴编码器速度输出到PLC内置高速输入点,将绕线轴与排线轴的速比进行简单速度同步,这种方法受PLC运算影响,同步精度差,计算量大,CPU处理时间较长,因此会出现绕线不均匀,堆积,塌陷等问题,严重影响绕线成品的质量,举例来说,PLC对绕线轴编码器作高速计数,当到达计数值时利用中断方式控制排线轴电机反向绕制,但受CPU运算处理时间的影响会出现滞后产生误差,在低速的情况下尚可基本达到绕制要求,但是对于高速绕制多层线圈时就会出现线圈端面不齐整,成品品质下降。
台达DVP-20PM00D是一款专用运动控制型PLC,采用高速双CPU结构形式,利用独立CPU 处理运动控制算法,可以很好地实现各种运动轨迹控制、逻辑动作控制,直线/圆弧插补控制等,在高速绕线机中正是利用了20PM运动控制器的电子凸轮功能很好的解决了上述绕线在换向时出现的绕制不均匀、堆积、不平整等问题。
运动控制器DVP-20PM00D二、高速绕线机机构和规格1、设备结构高速绕线机共包含九部分机构,分述如下:(1)机架机架由角钢框架及不锈钢台面组成,并设置脚轮便于移动,当设备到位后可将支脚调低作为稳定支撑。
(2)张力机构安装于进线部分,作为绕线张力调节,保证线圈绕制时维持张力恒定,张力调节器具有调节旋钮可针对不同需求进行张力调节设定,调整完毕后,张力调节器自动控制绕线张力。
绕线机控制器

绕线机控制器绕线机是一种广泛应用于电子、电器等行业中的自动化生产设备。
它将绝缘铜线等导线或电缆轴向绕制在线轴、线圈、电机定子和转子等器件上。
绕线机控制器是绕线机中的一个重要组成部分,它是控制绕线机自动化运行的关键。
绕线机控制器的功能绕线机控制器是绕线机上的“大脑”,它通过传感器、计算机控制单元和执行机构等部分构成。
绕线机控制器的主要功能如下:控制轴的移动绕线机通过控制电机的正/反向来改变轴的转动方向以及控制电机的速度来控制轴的移动,从而实现导线在轴上的绕制。
控制轴的移动需要绕线机控制器与电机的协同工作。
控制绕线张力绕线张力对绕线机的绕制质量有着非常重要的影响,因此绕线机控制器需要能够实时监测绕线张力,并通过电机控制调节轴的速度,确保绕线张力恒定。
控制绕线角度绕线机控制器通过控制导线的移动速度和轴的旋转速度来控制导线在轴上的绕制角度,确保绕线的角度精度。
控制线圈与导线之间的匹配当绕线机进行生产时,绕线机控制器能够根据预设的参数,控制线圈与导线之间的匹配。
同时,它还能够有效检测线圈的规格,从而及时制定完美的配套计划。
绕线机控制器的特点绕线机控制器具有以下几个特点:1.稳定性强,能够保证绕制质量的稳定性和精度。
2.控制范围广,可根据不同的绕制工艺要求,进行灵活的控制。
3.智能化程度高,绕线机控制器能够根据实际情况,进行智能判断,从而实现自动化运行。
4.体积小、功耗低。
绕线机控制器的技术参数绕线机控制器根据不同的绕线机型号和生产厂家而有不同的技术参数。
常见的技术参数有以下几个:1.转速控制范围绕线机控制器可控制的最大转速和最小转速。
转速控制范围会根据不同的绕线需求而有所变化。
2.绕线精度控制范围绕线机控制器的绕线精度控制范围决定了绕线机能够达到的最高绕线精度。
绕线精度控制的范围越大,绕线机的适用范围越广。
3.控制板卡数量和类型控制板卡数量和类型直接关系到绕线机控制器的适用范围和控制能力。
常用的控制板卡类型有IO板、运动控制板卡、计算机板卡等。
绕线机操作说明
4. 一 编辑时可跳回上一步序编辑,待机时, 连续按住此键二秒可使产量减一.
资料 起始 选择 步序
排线 结束 方向 步序
指示灯 绕线 自动 方向 归位
两端 自动 停车 启动
控制面板按键说明:
1. 起始 用来指定记忆体起始步序.设定起 步序 始步序,最多可设定1000个步序.一 般以产品名称后面三位数字来命名
灯亮就可以输入你要修改的资料。依次 8. 两端 编辑时,用来指定步序之绕完该 类推,修改第一个步序也是按以上方法。 停车 幅宽后自动停止,然后再绕。
自动
煞车
跳段
退段
复归
停车
启动
控制面板按键说明:
自动 按键:自动循环选择键,灯亮时为自动循运转。 煞车 按键:停车时或待机时,绕线轴煞住或者说是放松选择。
绕线机操作说明
制作: 审核: 批准:
日期:2008年8月28日
待机 运转 慢车
定位 超速 连线
步序
转速
归零
起绕点 幅宽 线径
转速
总圈数 起绕慢车 停止慢车
高速 低速 后退
资料 起始 选择 步序
排线 结束 方向 步序
产量
完成
绕线 自动 方向 归位
TAILY AUTO CNC-210S
789 45 6 123
步序 设定
产量 设定
一
两端 自动 停车 启动
0 清除 COPY 输入
自动
煞车
跳段
退段
复归
停车
启动
待机 运转 慢车
定位 超速 连线
起绕点 幅宽 线径
总圈数 起绕慢车 停止慢车
高速 低速 后退
SINAMICS S120 S120 CMS150 基本说明及应用

SINAMICS S120 内置式变频器高性能复杂应用传动 概述 SINAMICS S120 – 说明 SINAMICS S120 – 亮点简介 SINAMICS S120 – 技术数据 SINAMICS S120 – 典型应用SINAMICS S120 – 说明SINAMICS S120 SINAMICS S120 模块化运动控制驱动器适用于机械与系统工程中的高性能驱动应用。
西门子的 高性能驱动系统为您提供了广泛而相互协调的组件与功能, 可作为一个全面的运动控制驱动系统 使用。
这些运动控制驱动器包括高性能单轴驱动器和多轴共直流母线驱动器, 具有矢量控制或伺 服控制,可实现量身定制的高性能驱动解决方案。
SINAMICS S120 运动控制驱动器是一种高性 能驱动器,使用灵活,可提高生产效率。
除具有创新的系统结构和数字通信功能外,这些运动控 制驱动器还提供了创新的工具,并且接线简便,从而可进行高效组态与快速调试。
SINAMICS S120 功率范围为 0.12 - 4500 kW,具有各种结构形式和冷却方式。
To the top of the pageSINAMICS S120 – 亮点简介 伺服驱动器是模块化系统和机器设计的理想基础 创新的系统体系结构和数字通信功能 具有多种控制模式和与驱动器特定相关的工艺功能 内置有安全功能 通过 SIZER 和 STARTER 进行高效组态和快速调试 自动组态和自动优化 通过全集成自动化 (TIA) 实现集成解决方案 实现 SINAMICS 直至自动化级的集成To the top of the pageSINAMICS S120 – 技术数据额定值取决于运动控制驱动器的设计与类型额定值取决于运动控制驱动器的设计与类型 电压和功率范围: 控制原理: 0.12 - 4500 kW230 V、380 - 480 V 和 500 - 690 V (50/60 Hz) V/f 开环控制 矢量控制,带/不带编码器 伺服控制,带/不带编码器 To the top of the pageSINAMICS S120 – 典型应用不管是连续的输送线还是同步及高动态过程, 西门子的高性能驱动产品在众多工业应用中均能发 挥作用。
台达20Pm在线缆切割机上的应用2

台达运动控制器20Pm在线缆裁割机上的应用摘要:本文主要介绍台达20PM运动控制器在线缆裁切行业的数控裁割机中的应用,线缆裁割机以前都是利用传统的PLC通过中断的形式来完成裁割,跟随误差比较大,为了解决这个问题,利用台达20PM内置飞剪功能出色完成了各项需求,实现输送和裁切速度同步,并阐述了设备的工作原理、工艺要求及飞剪功能的应用概要。
关键字:台达20PM专用控制器程序设计凸轮功能飞剪动态CAM曲线,平滑加减速一:概述高速裁线机是应用于线缆行业的定长裁切设备,在线缆行业,有很多客户需要把生产出的线缆在高速送线的情况下按照一定长度定长切断,以便做各种接插件等。
由于目前的电缆原材料价格不断上涨,对裁线机的效率和精确度的要求不断提高。
过去,普通的控制方式就很难达到要求,比如在速度200M/MIN情况下,误差基本在5MM-10MM,其控制方式是利用PLC的高速计数功能,采集编码器的频率信号及长度,在长度达到的情况下,产生中断,发一脉冲信号,这个脉冲的频率就是采集的编码器的频率,控制切刀伺服动作。
由于每次切刀动作总是在滞后动作,产生误差不可避免。
本文叙述的方法是采用20PM自动生成飞剪凸轮曲线控制,实际控制精度达到1MM.以内。
二高速裁线机结构和原理1实际机械结构及外形如上图所示,左图为一测米轮,右图为切刀,侧米轮后带一2000线的编码器,2,电气控制原理上图所示为电气控制原理,图中分为送料单元和剪切单元,送料单元通过20PM上的DA卡,给变频器一0--10v的信号控制送料速度,剪切单元由20PM,根据TP设定的长度,以及编码器反馈的物料的速度和位置,控制剪切伺服动作,对线缆进行定长裁切。
20pm硬件具有500K的高速输入与输出脉冲,完全适应高速的响应与控制。
三电子凸轮旋切原理在旋切过程中,最重要的是速度同步,比如在切刀接触到物料时一定要与物料速度同步,如果接触时切刀速度大于同步速度,出现对物料一个向前牵扯的力,会照成物料切面不平,如果速度低于物料速度,会出现堵料的现象。
自动绕线机绕线参数的设定方法
自动绕线机绕线参数的设定方法现代自动绕线机随着科技的进步其功能和控制也变得更为强大和可靠,相比传统绕线机性能更为出众,工作效率也得到了很大的提高,作为一个集数控、光电、气动等一系列新技术应用的设备,其结构和功能的复杂程度也在增加,那么自动绕线机绕线参数的设定方法是怎么样的呢?下面就为大家做一个简单的介绍。
起绕点的设定自动绕线机起绕点的含义就是设备开始排线的起点,是排线轴与绕线骨架之间的一项距离参数,该参数由具体的绕线工艺决定,绕线机一般都具有实时测量功能,通过该功能可以在测得起绕点的数据,也可以通过人工方式进行计算得出起绕点的数据,设定该参数是需要注意的是搞清楚设备的排线方向,排线方向与起绕点设定正确于否有直接的关系,要确保设定的起绕点符合绕线工艺。
绕制线径的设定线径的含义就是绕制线圈所用的漆包线的直径,线径的正确设定决定了绕线机能否正常排线,应该根据实际线径加上O〜5%线径修正量,使用铜线和铝线的差别很大,因为材质的不同其设定值也不同,使用铜线时其线径修正值可以适当减小,使用铝线时,应结合张力值的设定来调整线径修正量。
绕线宽幅的设定宽幅简单的理解就是从起绕点到该层绕线结束的距离,同样也就是绕线骨架的距离,宽幅的设定需要考虑骨架的实际变形量,对于骨架变形严重的要加大变形量的修正值,宽幅值的设定也可以借助绕线机的测量功能来完成,对于骨架的测量也是必须的,有针对性选取一定数量的骨架作测量,综合测量的数据来设定绕线宽幅。
其他常用参数的设定自动绕线机常见的设定参数还有自动启动、自动归位、层层停、慢速等一系列的辅助功能,这些功能需要根据用户的实际绕线工艺来配合使用,张力装置在绕线机中也起着重要的作用,张力设定得当可以使绕制的线圈更为服帖和美观,反之张力设定不当会出现脱漆、改变线圈的电气特性。
当用户熟悉了设备参数的设定方法后应该结合自身绕线产品的特点去调整设备,设定方法不是一成不变的,可以灵活的组合应用,用户应当在实际使用中加以总结,这样才能更好的发挥自动绕线机的效率和作用。
三轴绕线机-电子凸轮应用说明

定距轴伺服参数设置:
伺服轴扭矩到达信号需要接入至伺服驱动器的ORGP作为原点到达信号,如果该信 号比较短,也可以通过接入至20PM的输入点,再延时输出一个输出点接至ORGP信 号。
电子凸轮曲线:
HMI设置:
D552 无符号单字 D568 无符号双字
D500 无符号单字
D510 无符号双字 D521 有符号单字
电子凸轮曲线数据运算:
20PM:
伺服每转脉冲数
螺距
电子凸轮曲线数据运算:
20PM:计算单层匝数来自电子凸轮曲线数据运算:
20PM:
线径*单层匝数=线圈宽度 线圈宽度/螺距=主轴需要旋转的圈数 主轴需要旋转的圈数*主轴伺服每转 脉冲数2500PPR=主轴总脉冲数
电子凸轮曲线数据运算:
20PM:
计算主轴需要旋转的总脉冲数 =总匝数*每转脉冲数 该计算程序包含小数点运算
电子凸轮曲线数据运算:
20PM:
点击【汇出】可将电子凸轮曲线的位 置表格输出至安装目录下 \CAMData\Data_S
汇出的数据,可根据该位置坐标与实 际计算进行核对
电子凸轮曲线数据运算:
20PM电子凸轮自动启动:
自动启动调用子程序P0
电子凸轮曲线数据运算:
20PM电子凸轮自动启动子程序:
初始化主从轴运行命令
电子凸轮曲线数据运算:
20PM:
DTO K100 K0 D0 K10 触发M60生成电子凸轮曲线
DMOV K10002 D5000 DTO K100 D5000 D0 K1 动态更新电子凸轮曲线
电子凸轮曲线数据运算:
20PM:
生成电子凸轮曲线后,可关闭应用程 序,重新上载应用程序,观察曲线图 形以及各个位置是否与实际计算结果 相同
制作自动排线绕线机

制作⾃动排线绕线机做胆机⽜是最头痛的,好的价格不低,便宜的⼜不敢⽤。
本⼈是打⼯族,⽩天要上班,只有晚上回来可以折腾。
⼿动排线绕过⼀次眼珠⼦都差点瞪出来,太累太累了。
索性⾃⼰⿎捣⼀个⾃动排线的绕线机。
只因单⽚机程序搞不定,(实验板也买了就是没学会写程序)没办法只能想到⽤电脑控制,⽤MACH3控制步进电机绕线排线。
其实做这个的难度在于机械部分,电脑控制其实⽐较简单的。
整机图⽚制作⾃动排线绕线机排线部分光轴12MM 丝杆12MM 丝距2mm 就是丝杆转⼀周螺母移动2Mm制作⾃动排线绕线机绕线部分都是废铜烂铁做的制作⾃动排线绕线机绕线同步⽪带减速2:1制作⾃动排线绕线机扔⼤街上都没⼈要的烂电脑,旁边是做好的⼀个⽜。
制作⾃动排线绕线机绕线步进电机 57 3A 步进⾓度1.8度制作⾃动排线绕线机排线步进电机 42 1.2A 1.2度制作⾃动排线绕线机以下是电脑控制部分电脑MACH3控制部分安装好以后汉化(本⼈英⽂太垃圾)⾸先设置为毫⽶制作⾃动排线绕线机制作⾃动排线绕线机然后找到 “端⼝/针脚 ” "电机输⼊" ,我是这么设置的反正能⽤制作⾃动排线绕线机接下来是MACH3的重点绕线电机设置脉冲数,我们假设绕线电机转⼀周是1MM ,我们⽤的这个步进电机是1.8度的,所有步进电机转⼀周要(360度/1.8度=200)200个脉冲。
下⾯那个图是步进电机控制板我设置的是2细分,所以再乘以2就等于400,主轴⽤的是同步轮减速2:1 ,所以再乘以2就等于800. 也就是电脑上MACH3输出800个脉冲信号主轴转⼀圈。
制作⾃动排线绕线机制作⾃动排线绕线机排线电机设置脉冲数,绕线电机⽤的是1.2度的,360/1.2=300 控制板设置的细分数是8300*8=2400,所以2400个脉冲步进电机转⼀周。
因为丝杆的丝距是2MM,这⾥再除以2(2400/2=1200)最后得到的事1200个脉冲,排线⾛1MM制作⾃动排线绕线机以上⼤部分是以个⼈理解写的,可能跟专业名词有差距。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用20PM运动控制器新版软件实现绕线机控制模块的编制
PLC产品开发处余强
摘要:
本文主要介绍如何用台达20PM运动控制器软件实现功能块的编制,并通过编制绕线机通用控制模块案例描述编程细节,从而使用户通过本文熟练使用功能块,编制其他典型行业的通用模块程序。
减少重复性的劳动。
关键字:台达20PM运动控制器FB(FUNCTION BLOCK)
一:前言
功能块能够封装数据和逻辑,有面向对象的含义,其组成及对控制编程软件的贡献很像是现代电子电路中的集成芯片。
功能块允许来自不同程序的结合。
IEC 61131-3标准保证了功能块定义接口的使用,即定义的输入和输出参数。
由不同程序员设计的功能块可借助输入和输出参数进行交互,当然输入和输出参数必须是标准中定义的数据类型。
FB不仅利于结构化程序设计,长远地看还能加速应用开发,尤其对相近的应用开发有效。
现代控制系统的一个目标是代码重用,相同的控制逻辑无论硬件是PLC、DCS或是PC,均有相同的程序源代码,这个目标只有通过FB实现。
二 20PM 软件PMSOFT架构
在程序架构上主要分为O100主程序、Ox运动子程序及
Pn子程序,中断子程序等四大类,结合了基本指令、应用指令、运动指
令及G Code指令,使程序设计更多元化,结构更清晰;程序采用PMSOFT
软件进行编辑。
(1)主程序。
主程序以O100作为起始标记,M102作为结束标记,是
PLC顺序控制程序,主要为控制主机动作执行,在O100主程序区域中,
可以使用基本指令及应用指令,或在程序中启动Ox0~Ox99运动子程序
及调用Pn子程序。
主要提供主控制程序的建立,以及运动子程序的设
定及启动控制。
(2)运动子程序。
Ox0~Ox99运动子程序为运动控制程序,主要为控
制20PM系列主机进行X-Y轴双轴运动之子程序,于Ox0~Ox99运动子
程序区段中,有支持基本指令、应用指令、运动指令及G码指令,并在
程序中可规划呼叫Pn指针子程序,通过PLC提供的内部特D特M进
行子程序的控制。
主要提供运动子程序的建立,以及运动子程序的运动
控制,在架构上可算是20PM的运动指令及G码指令规划区域。
(3)子程序。
这里所说的子程序是指以Pn开头的一般用子程序,主
要是被O100主程序及Ox运动子程序调用的子程序。
如在O100主程序
调用Pn指针,则Pn指针子程序支持基本指令及应用指令;若在Ox0 ~
Ox99运动子程序中调用Pn指针时,则Pn指针子程序区段可支持基本指令、应用指令、运动指令及G 码指令。
(4)中断子程序,可执行由START0,STOP0,START1,STOP1,等外部产生的中断,或由定时产生的中断,在中断里可执行置位,复位,及传送数据。
(5)功能块,
可將複雜專案拆成數個,使問題簡單化例如在撰寫PLC程式時, 考量到一部份功能可能會重覆使用。
因此, 可將此部份程式獨立出來撰寫成FB。
之後再將這些FB組合至程式中並載入PM運行。
三如何建立FB功能块
如图所示,点击FUNCTION BLOCK,在弹出菜单上输入功能块名,FB命名規則:
1.不區分大小寫(ex: “abc”相等於“ABC”)
2.不允許重複定義相同名稱的FB
3.不能為指令名稱(ex: LD, LDI)
4.最多允許20個字元
然后输入密码
密碼設定:
當使用者設定密碼後, 在開啟此一FB時, 需輸入正確密碼,
否則無法看到FB的內容
FB是由符號編輯表單和Ladder編輯器所組成
Ladder程式中使用的变量或功能塊必須在变量表單中宣告
區域符
號編輯表單
Ladder程式編輯區
• 類別(Class) 有三個選項
-V AR : 區域變數
-INPUT : 輸入變數
-OUTPUT : 輸出變數
Example: Function Block 型態POU的區域變數表
變數命名規則:
1. 變數名稱不區分大小寫
2. 變數名稱可由底線符號、英文字母、數字所組成
3. 不可有連續兩個以上的底線符號
4. 底線符號不可以出現在最後一個字元
5. 最大長度為20個字元
6. 名稱中不可以含有空白字元
7. 變數名稱不可以為裝置名稱(ex: D10, M100)
變數型態:
基本型態(Simple Type):
_ BOOL:宣告變數型態是一位元(BIT),系統配置為M裝置。
_ WORD:宣告變數型態是16位元,系統配置D裝置。
_ DWORD:宣告變數型態是32位元,系統配置連續2個D裝置。
_ LWORD:宣告變數型態是64位元,系統配置連續4個D裝置。
FLOAT:宣告變數型態是32位元浮點數,系統配置為2個D裝置,用於浮點
數指令。
_ COUNTER:宣告變數型態是16位元計數裝置,系統配置C計數裝置。
TIMER:宣告變數型態是16位元計時裝置,系統配置T裝置。
_ ARRAY :陣列為連續的記憶體位址(型態包括:BOOL, WORD, FLOAT,
TIMER, COUNTER)
功能塊(Function Block):
四通过实例建立绕线FB功能块
如下图所示,为一般绕线的通用模式,通常包括一个旋转轴,一个排线轴(往复运动轴)
其中的参数有线径(也称间距或节距),单层匝数,总匝数,以及绕线轴的一周脉波数,及一周移动
单位,以及排线轴的一周脉波数,及一周移动单位。
这些参数具有通用性,不论其在何种绕线模式下,都需使用到,不过是参数的大小不同而已。
下面我们通过几个步骤实现绕线模块的建立
步骤一,在FUNCTION BLOCK 中建立绕线机模块功能块
步骤二,在绕线机模块功能块中建立变量表
输入参数有线径(也称间距或节距),单层匝数,总匝数,以及绕线轴的一周脉波数,及一周移动单位,以及排线轴的一周脉波数,及一周移动单位
步骤三,在绕线机模块功能块中建立梯形图,实现绕排线功能的逻辑运算及生成CAM,
如上一个生成绕排线曲线的功能块就建立了。
五 通过O100调用绕线FB 功能块
如下图所示,需在O100变量表中,建一个变量,这个变量明名为绕线实例1,它的数据类型选择为绕线功能块。
然后就可在主程序中调用。
六匯出功能塊匯出功能塊
编制好的绕线功能块,必须方便的便于输出到其他程序中使用。
便于各个项目需用时调用,避免重复开发,浪费精力。
20PM 新版PMSOFT具备匯出功能塊匯入功能塊功能
讓使用者將寫好的功能塊建立成程式庫, 以便達到功能塊重複使用的功效
匯出功能塊(Export Function Blocks) :
_ 提供單一或是多個功能塊的匯出
_ 提供密碼保護功能
_ 系統預設的附檔名為(.fbu)
匯入功能塊(Import Function Blocks) :
_ 不允許匯入相同名稱的功能塊
_ 當匯入功能塊有密碼保護時, 需輸入正確的密碼, 才能完成匯入
通过这种方式,可以实现不同程序间共享成熟的控制方式。
七结束语
通过绕线功能块的案例,我们可以把20PM的一些功能进行打包实现其他行业标准功能块的编制,比如对标飞切,可以把动态飞剪指令和高速抓取指令及一些变量打包集成功能块,便于行业用户使用,使其在不懂编程只知道工艺的情况下,输入工艺参数,即可完成控制。
总之,功能块的使用提高了系统可靠性。
数据封装避免了许多错误源,用户不必关心具体实现细节,只需关心与外部的接口和如何使用。
开发人员只需注重于实现,而不必关心使用。
大大方便编程人员的开发,及客户的使用。