SR-12401运动控制器用户手册
7SR11 and 7SR12中文用户手册

7SR11 & 7SR12 Argus C 操作手册7SR11 和 7SR12操作说明文件发布记录本文件是2011/06期,迄今及包括本期所做修订的列表如下:2011/06软件维护2010/04PLM 审查后所做的修正2010/02重命名后文件的重新排版2009/09排版及继电器面板修改2009/04第一期软件修订记录售后服务西门子电力自动化有限公司服务热线:400-828-9887本文件及由本文件产生的模型或文章的版权及其他知识产权(包括注册或未注册的外观设计权)均归西门子保护设备有限公司所有。
未经西门子保护设备有限公司许可,不得在任何数据检索系统中以其他形式复制、修改或储存本文件的任何部分,亦不得复制任何模型或文章。
©2011 西门子保护设备有限公司目录51.1 电流互感器电路 (5)1.2 外部电阻 (5)1.3 5 第2部分:硬件描述 (14)2.1 142.2 152.3 162.4 电源供应装置(PSU) (16)2.5 操作界面/显示板 (16)2.6 电流输入 (20)2.7 电压输入 (20)2.8 二进制输入 (20)2.9 二进制输出(输出继电器) (21)2.10 虚拟输入/输出 (22)2.11 自我监测 (22)2.11.1 保护健康/缺陷 (23)第3部分:保护功能 (24)3.1 电流保护:相过流(67, 51, 50) (24)3.1.1 方向过流保护(67)-7SR12 (24)3.1.2 过流保护(50) (25)3.1.3 反时限过流保护(51) (26)3.1.4 电流保护:电压受控过流(51V) - 7SR12 (28)3.2 电流保护:计算的接地故障(67N、51N、50N) (28)3.2.1 计算的接地方向保护(67N) – 7SR12 (28)3.2.2 计算的接地故障保护(50N) (29)3.2.3 计算的反时限接地故障保护(51N) (30)3.3 电流保护:实测接地故障(67G, 51G, 50G) (32)3.3.1 实测的方向接地故障保护(67G)-7SR12 (32)3.3.2 实测接地故障保护(50G) (33)3.3.3 实测的反时限接地故障保护(51G) (34)3.4 电流保护:灵敏接地故障保护(67SEF, 51SEF, 50SEF) (35)3.4.1 带方向的灵敏接地故障保护保护(67SEF)-7SR12 (35)3.4.2 灵敏接地故障保护(50SEF) (36)3.4.3 反时限灵敏接地故障保护(51SEF) (38)3.5 电流保护:高阻抗限制性接地故障(64H) (40)3.6 电流保护:冷负载(51c) (40)3.7 电流保护:负序过流-(46NPS) (41)3.8 电流保护:欠流(37) (42)3.9 电流保护:热过载(49) (43)3.10 电流保护:线路检查50LC, 50G LC和50SEF LC –仅有软件选项‘C’ (45)3.11 电压保护:相位欠压/过压(27/59) – 7SR12 (46)3.12 电压保护:负序过压(47)-7SR12 (48)3.13 电压保护:零序过压(59N) – 7SR12 (48)3.14 电压保护:欠频/过频(81) – 7SR12 (49)第4部分:控制和逻辑功能 (51)4.1 自动重合(79)可选功能 (51)4.1.1 概述 (51)4.1.2 自动重合序列 (52)4.1.3 自动重合保护菜单 (53)4.1.4 自动重合配置菜单 (53)4.1.5 P/F Shots 子菜单 (56)4.1.6 E/F Shots 子菜单 (56)4.1.7 SEF Shots 子菜单 (56)4.1.8 Extern Shots 子菜单 (56)4.2 手动CB控制 (59)4.3 断路器(CB) (59)4.4 快速逻辑Quick Logic (61)第5部分:监测功能 (63)5.1 断路器失灵(50BF) (63)5.2 VT 监测 (60VTS) – 7SR1205 & 7SR1206 (65)5.3 CT 监测 (60CTS) (67)5.3.1 60CTS-I – 7SR11 (67)5.3.2 60CTS – 7SR12 (67)5.4 CT回路断线(46BC) (68)5.5 跳闸/合闸回路监测(74TCS & 74CCS) (68)5.6 二次谐波闭锁/浪涌限制(81HBL2)仅相电流元件 (69)第6部分:其他功能 (71)6.1 数据传输 (71)6.2 716.2.1 输出矩阵测试 (71)6.2.2 CB计数器 (71)6.2.3 I2t CB 磨损 (71)6.3 数据存储 (72)6.3.1 概况 (72)6.3.2 需量 (72)6.3.3 事件记录 (72)6.3.4 波形记录 (72)6.3.5 故障记录 (73)6.4 736.5 操作模式 (74)6.6 控制模式 (74)6.7 实时时钟 (74)6.7.1 时间同步—数据传输接口 (75)6.7.2 时间同步—二进制输入 (75)6.8 设置定值组 (75)6.9 密码功能 (75)符号和专门用语下列命名及排版惯例将用于本文件的其余部分:菜单位置设置:主菜单>子菜单设置:元素名称–设置定值:数值选择项:[第一] [第二] [第三]开入量输入信号(用户可视)开出量输出信号(用户可视)连接其它元件来的数字输入/输出信号(用户不可视)内部数字信号(用户不可视)模拟量信号与门或门异或门Elem InhibitElem StarterPhaseAFwdL1 Dir BlkIL1&11Elem Char DirNon-Dir保护功能选项列表ForwardReverse通用功能设定通用控制输入(c)ccstart功能块trip当控制输入( C ) =1I,功能模块被允许start事件:用于IEC, Modbus或c tripEVENTDNP规约Relay instrument INST.©2011 西门子保护设备有限公司第4页第1部分:简介本手册适用于下述继电器:7SR11 过流和接地故障保护继电器7SR12 方向过流和方向接地故障保护继电器“订购选择”表中归纳了每个型号的功能安全注意事项1.1 电流互感器电路!带电CT的次级电路不得为开路,否则将导致人身伤害或设备损毁。
nRF24L01P产品说明书V1.0资料
nRF24L01+单片机2.4 GHz收发器产品说明书v1.0主要功能:全球通用的2.4 GHz ISM波段操作250kbps, 1Mbps and 2Mbps空中数据传输速率超低功率运行发射功率为0dBm(1.0mW)时,发射电流为11.3mA2Mbps空中数据传输速率,接收电流为13.5mA掉电电流为900nA待机-I电流26μA片内电压调整器1.9至3.6V电源供电范围增强型ShockBurst TM自动数据包处理自动包数据包事务处理6数据通道的MultiCeiver TM与nRF24L01嵌入式兼容空中数据速率250kbps 和1Mbps,与nRF2401A,nRF2402, nRF24E1和nRF24E2兼容低BOM成本±60ppm 16MHz晶振容许5V输入紧凑的20引脚4x4mm QFN封装应用无线 PC外围设备鼠标,键盘和遥控器三和一桌面捆绑先进的媒体中心遥控器网络电话耳机游戏控制器蓝牙模块运动手表和传感器消费电子产品射频遥控器家庭和商业自动化超低功率无线传感器网络RFID 射频识别资产跟踪系统玩具免责条款北欧半导体ASA有权做出随时更改,提高产品可靠性、功能或设计,不另行通知。
北欧半导体ASA不承担由于应用程序或使用任何所述产品或电路引起的责任。
所有应用程序的信息咨询,不构成说明书的组成部分。
极限值超过一个或多个限制的应力可能会造成设备永久性损坏。
这些应力等级只有在这样或那样的操作环境中提出,在规范中没有给出。
长时间暴露在限制值附近可能会影响设备的可靠性。
生命支持应用这些产品并非为因故障会引起人身伤害的维生装备,设备或系统设计的。
北欧半导体ASA客户使用或出售这些产品,他们将自担风险并同意完全赔偿北欧半导体ASA因使用不当或销售行为造成任何损害。
详细联系方式访问www.nordicsemi.no进入北欧半导体销售办事处和全世界的分销商网站总办公室:Otto Nielsens vei 127004 Trondheim电话: +47 72 89 89 00传真: +47 72 89 89 89www.nordicsemi.no写作惯例本产品规范遵循一套排版规则,文档一致,容易阅读。
SEIKO KT-401 SHOOTING TIMER 操作手册说明书

CAUTION(1) This manual may not be copied or reproduced in any form, in whole or in part, without the express written consent of SEIKO.(2) This manual may be subject to change without notice.(3) This manual has been prepared carefully to provide you with complete information for the operation of this product. For the purpose of constant improvement in this manual, your suggestions and comments on the descriptions included in it are highly appreciated.(4) SEIKO shall not be liable for any failure of this product or direct or indirect damages resulting from such failure if such failure is caused due to abuse, misuse, failure to observe instructions in this manual and neglect of other reasonable care, and servicing, changes, modifications or alterations performed by other than SEIKO or a servicing contractor authorized by SEIKO.SAFETY ALERT SYMBOLSThe symbols and terms used in this manual have the meaning as explained below:WARNINGWARNING is used to indicate a potentially hazardous situation which is likely to cause death or severe personal injury if the instructions under this heading are not followed correctly.CAUTIONCAUTION is used to indicate a potentially hazardous situation which is likely to cause personal injury or property loss if theinstructions under this heading are not followed correctly.The following pictorial symbols indicate what must NOT be done.The following pictorial symbols indicate what must be done .General prohibitionProhibition against disassembly/ tampering Prohibition against use near waterProhibition against handling with wet hands Prohibition against exposure to waterGeneral instructionsExtraction of power plugTable of Contents1. SAFETY PRECAUTIONS (1)2. OVERVIEW (3)3. FEATURES (3)4. NEMES AND FUNCTIONS OF PARTS ............................................... (3)5. BEFORE USING YOUR SHOOTING TIMER (5)6. METHOD OF OPERATION (6)7. PRODUCT COMPOSITION AND SPECIFICATIONS (8)1. SAFETY PRECAUTIONSThe following precautions must be strictly observed for the safety of yourself and your fellow workers and for the protection of property from loss and damages.CAUTIONDo not leave the Product under direct sunlight for a long time. The temperature inside it may rise excessively to damage the circuit and other parts.Before connecting the power cord and other cables to the Product, be sure to check that the power switch is turned off. Do not use any power cord or cable other than specified. Otherwise, an electric shock or malfunction may be caused.This Product is equipped with precision electronic circuits. Misuse or abuse, or rough handling of the Product may adversely affect the performance of such electronic circuits, causing a malfunction and reducing the serveable life of the Product.When the power switch is turned on and off or vice versa in succession, an interval of at least 5 seconds should be provided between the switch operations.Before moving the Product, be sure to turn off the power switch. An electric shock or malfunction may result.While the Product is not in use, be sure to keep the power plug disconnected from the outlet. Otherwise, the insulation will be deteriorated to cause an electric shock, leakage of electricity, or fire.If any abnormal operation occurs due to an abnormal signal transmitted from outside or other causes, turn off the power switch, and then turn it on again after at least 5 seconds.When connecting the cables, insert the plugs properly. Otherwise, a malfunction or abnormal operation may be caused.Do not expose the case of the Product to solvents such as alcohol and gasoline, spray of cosmetics or the like, cleaners, adhesives, or paints. They may discolor, deteriorate or damage the case due to chemical change.2. OVERVIEWSEIKO SHOOTING TIMER KT-401 is a display device that is preadjusted to count and show the lapse of time required by the 24- and 14-second rules in basketball. It also supports the 30-second rule in mini-basketball.In addition to those preset times, the timer can be set for any desired amount of time up to 99 seconds in one second increments, making itself suitable for a wide variety of training programs.3. FEATURES・The characters displayed are clear and highly visible with their height of 250 mm and the use of high-intensity LED.・“Start/Stop”, “Reset & Start” and “14 sec. Reset & Start” buttons on the operation panel to control the timer are illuminated from within to show the operation status of the respective buttons.These buttons are distinguishable from others by being larger in size or different in shape, increasing the user-friendliness of the operation panel.・The preset 24 and 14 seconds can be adjusted as desired, and the time you have set can be retained in memory. ・KT-401 is a product recommended by the Japan Basketball Association (JBA) for the use in the games ofbasketball.4. NAMES AND FUNCTIONS OF PARTS DISPLAY BOARD<Front><Bottom><Rear>High-intensity red LED2-M6 nut(for mounting KT-401 on a stand) * KT-401 can be mounted on Stand KT-011 and Desktop Stand KT-022 (both sold separately).Connector(for connecting signal cable)<Rear>Connector for adaptor withpower cableConnector for display boardStart/Stop buttonReset & Start button for14 sec. countdown Reset & Start button for 24/30 sec. countdownConnector for transmitting displaydata signal * Not used in normal system configuration.* To be used when system isextended.Connector for externalbuzzer* BZ-050 can be connected.Connectors5. BEFORE USING YOUR SHOOTING TIMER1. Securely connect the adaptor with power cable included with KT-401 to the power connector of the operation board, and insert the power plug of the power cable properly into the outlet.2. Securely insert the plugs of the dedicated cables into the connectors on the rears of the display board and operation board, and tighten the connector nuts.<Connection diagram for connectors on the rear of operation board>* 30 m and 50 m signal cables can be connected interchangeably to either of the connectors of the display board.3. Turn on the power switch. The corresponding LED lamp lights up while the power is on.4. Press button to engage/disengage the time-up warning buzzer. The corresponding LED lamp lights up while the buzzer is engaged.5. The buzzer sounds while button is kept pressed.6. Press button to select 1 or 1/10 second increment display to be shown after the countdown time has reached less than 10 seconds. The corresponding LED lamp lights up while 1/10 second increment display is selected.7. If the display board is turned off by pressing button, the buzzer is automatically disengaged. When the display board is turned on again, the buzzer is engaged or disengaged according to the previous setting.8. With each press of button, the countdown time is changed over between 24 and 30 seconds. When 30 seconds is selected for the countdown time, “.” is shown after “30” on the display monitor of the display board.<Display monitor>KT-401OP6 METHOD OF OPERATION● Operation Procedure: Normal UseOperation Button operationAction/RemarksDisplay monitor1To start gameTimer starts counting down set time. Countdown is started. * Start/Stop button flashes in red.2A shot was made.Keep button pressed.Timer is stopped. * Reset &Start button lights up in green.3Ball was rebounded.Release button.Countdown is started. * Start/Stop button flashes in red.4When ball goes out of bounds, and play is stopped:* If throw-in is awarded to the other team, reset timer.Timer is stopped. * Start/Stop button lights up in red.5 To adjust countdown timeEx.) To change from“18” to “15” seconds:6Game is restarted.* Start/Stop button flashes in red.7 24 seconds have elapsed, and play isstopped.Timer stopsautomatically with buzzer sound.(Buzzer)● To start countdown from 24 seconds8-1 To reset timerKeep button pressed. * Reset &Start button lights up in green.8-2 To start countdownRelease button* Start/Stop button flashes in red.●To start countdown from 14 seconds9-1 To reset timerKeep button pressed. * 14 sec.Reset &Startbutton lights up in green.9-2 To start countdownRelease button* Start/Stop button flashes in red.■ To change countdown time to other than 24 or 14 secondsOperationButton operationAction/RemarksDisplay monitor1 While timer is stopped* Start/Stop button lights up in red.* Reset &Start button lights up in green.2To change countdown time from 24 to 23 secondsEx.) To change from“24” to “23” seconds:3To change countdown time from 14 to other setting→* Start/Stop button lights up in red. * 14 sec.Reset &Start button lights up in green.4To change countdown time from 14 to 15 secondsEx.) To change from“14” to “15” seconds:■ To cancel set countdown time when power switch is turned off (when playing a game under a special rule applied only to the game):5-1To register settingButton flashes in green three times.* To return to the preset countdown time selected before the change, keep button pressed for more than 2 secods, or turn off and on the power switch.■ To retain set count down time when power switch is turned off (when current rules are changed)5-2 To register setting+Buttons flash in green three times.* Note that the countdown time of 30 seconds cannot be changed to any other setting.7. PRODUCT COMPOSITION AND SPECIFICATIONS1. Product Composition①24-sec. Display Board KT-401DP ................................................................................... 2 units②24-sec. Display Operation Board KT-401OP................................................................. 1 unit③Adaptor with Power Cable (5 m) KT-ADP01 ................................................................. 1 piece④50 m Signal Cable KT-401CA50 .................................................................................... 1 piece⑤30 m Signal Cable KT-401CA30 .................................................................................... 1 piece2. Specifications・Dimensions ...................... Display board: Approx. 500 (W) x 338 (H) x 55 (D) mmOperation board: Approx. 186 (W) x 73 (H) x 182 (D) mm ・Character height .............. Display board: 250 mm・Display ............................. Display board: High-intensity red LED・Weight .............................. Display board: Approx. 2.6 kgOperation board: Approx. 1.1 kg/ Adaptor with power cable0.7 kg30 m cable: Approx. 1.4 kg50 m cable: Approx. 2.1 kg・Power supply ................... AC 100 ~ 240 V, 50/60 Hz・Case material ................... Display board: ABS resinOperation board: Steel plate with baked finish Note: The above specifications are subject to change without prior notice for product improvement.8URL http://www.seiko-sts.co.jp- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -GUARANTEEThank you very much for purchasing SEIKO SHOOTING TIMER KT-401.We certify that the Product is guaranteed against defects in material and workmanship according to the guarantee conditions specified herein.If the Product malfunctions under normal use as described in this Operating Manual within one year from the date of purchase, it will be repaired without charge.To qualify for the services under the guarantee, you must present your SEIKO SHOOTING TIMER KT-401 to the retailer from whom it was purchased, or a service facility designated by us. Packaging and transportation charges are to be paid by the owner of the Product.Even within the guarantee period, repair services will be provided at cost in the following cases:(1) Failure or damage caused by misuse or carelessness;(2) Failure or damage caused by improper repair or modification;(3) Failure or damage caused by improper handling such as dropping of the Product duringtransportation after purchase;(4) Failure or damage caused by natural disasters such as fire, flood, earthquake and lightning, andother factors beyond the control of us such as smoke and other air pollution and extraordinary atmospheric pressure;(5) Scratches, cracks or other damage on the case caused by use over time;(6) If the name of the retailer and the purchase date are not indicated in the space below, or if such informationhas been rewritten; and(7) If this Guarantee is not submitted together with the Product.Please note that this Guarantee is valid only if the name of the retailer and the date of purchase are properly entered by the retailer from whom your SEIKO SHOOTING TIMER KT-401 was purchased.9I-6503E-1。
RKC SRZ模块控制器 说明书

模块型控制器SRZ 使用说明书理化工业株式会社RKC INSTRUMENT INC.[详细版]IMS01T04-C1z MODBUS是Schneider Electric的登录商标。
z另外,在本说明书中记载的公司名称或商品名称,一般为各公司的商标或登录商标。
All Rights Reserved, Copyright © 2006, RKC INSTRUMENT INC.IMS01T04-C1 i-1感谢您购买理化工业株式会社的产品。
使用本产品前,请认真阅读本说明书,在理解内容的基础上正确使用。
并请妥善保存,以便需要时参考。
标记规定: 记载着有可能因触电、火灾 (烧伤) 等对使用者的生命或人身安全构成危险的注意事项。
: 记载着如果不遵守操作步骤等,有可能损坏机器的注意事项。
: 在安全上特别提请注意的地方,使用此记号。
: 指出有关操作以及使用上的重要事项时使用此记号。
: 指出有关操作以及使用上的补充说明时使用此记号。
指出详细情报及关联情报的参照对象时使用此记号。
注 意z本产品是A级机器。
本产品有时在家庭环境内发生电波干扰。
此时,请采取充分对策。
z本产品通过强化绝缘进行触电保护。
将本产品嵌入设备上以及配线时,请遵守嵌入设备所符合的规格要求。
z将本产品的所有输入输出信号线,在室内配线时,如果配线长度超过30 m的场合,为了防止浪涌发生,请设置适当的浪涌抑制电路。
另外,在室外配线的场合,不管配线长度为多长,请设置适当的浪涌抑制电路。
z本产品是以安装在测量盘面上使用为前提而生产的,为了避免用户接近电源端子等高电压部位,请在最终产品上采取必要措施。
z请务必遵守本说明书所记载的注意事项。
如果不遵守注意事项进行使用,有导致重大伤害或事故的危险。
z配线时,请遵照各地的规定。
z为了防止触电、机器故障、误动作,请在电源、输出、输入等所有配线完成之后,再投入电源。
另外,在修复输入断线时、或修复接触器、SSR的更换等有关输出时,也请将电源一时关断,所有配线完成之后再投入电源。
2020年三菱FX1S系列PLC使用手册

作者:败转头作品编号44122544 : GL568877444633106633215458时间:202012.13三菱FX1S系列PLC使用手册请不要从外部电源对基本单元的“24+"端子供电。
还有不要对空端子““进行外部接线。
否则有可能引起产品损坏。
电源出现不满10ms的瞬时断电控制器仍会继续工作。
24V+、COM端子可以作为传感器用供给电源400mA/24V使用。
另外,这个端子不能由外部电源供电。
1.存储盒:FX1N-EEPROM-8L具有程序读写传送功能的8K步EEPROM。
2.显示模块:FX1N-5DM3.能监控位软元件的ON/OFF和字软元件的当前值/设左值。
也可强制SET/RST位软元件以及改变字软元件的当前值/设左值。
是一种超小型设泄显示器。
4 .功能扩展板:具有通信功能或作为模拟电位器使用的板,无论哪个都可使用一个。
FXln-232-BD:可以连接计算机和打印机等的RSD-232C通讯用板。
FXln-422-BD:可以连接可编程控制器外围设备的RS422通信用板。
FXln-485-BD:可用于并联链接和简单PC间链接等网络的RS-485通信用板。
FXln-CNV-BD:可以连接FXOn用特殊适配器的板。
FXln-8AV-BD:装有8点模拟电位器的板。
5.选件可按下列组合使用:可以并用:显示模块+功能扩展板。
必须注意:存储盒+功能扩展板。
存储合仅限于传送程序时使用,在平时不要对存储合进行安装使用。
不可并用:存储盒+显示模块。
存储盒十显示模块+功能扩展板。
6.存储盒:存储盒具有可以代替FXls内萱EEPROM存储器的功能,还有与EEPROM存储器之间进行程序读写装载的功能。
如装上存储盒那它将代替内程EEPROM存储器优先进行动作。
FXln-EEPROM-8L 内存容量8k 步。
外围设备进行程序写•入时,请将PROTECT开关宜为OFF。
7.写入操作:(8L~PLC)可编程控制器状态STOP时有效。
雷凌电子 猛禽BLS 4in1-20A无刷电子调速器说明书

序号序号03 元件清单/安装尺寸持续电流瞬时电流(10S )BEC 尺寸(供参考)重量锂电池节数型号Raptor BLS 4in1-20A20A30A2-4S31.6x31.2x6mm6.2gNo典型应用(供参考)120-180多旋翼*图片仅供参考,产品以实物为准04 电调连线示意图推荐匹配R aptor S -Tower 20A 飞控, 安装更简单。
F4.电调额外提供了:一根6Pin 线束(6P SH1.0端子 ),用于与飞控的连接;一根16AWG 电源输入线束(XT30端子)。
05 编程参数值06 注意事项安装尺寸(mm )猛禽BLS 4in1 20A 电调隔离柱硅胶减震柱螺钉 M2*22描述数量14841. 启动功率 (Startup power ):启动功率可以设置从0.031到1.5的一个值。
它是启动过程中允许的最大功率,实际应用的功率取决于油门的输入值。
启动功率也会影响双向操作,因为启动功率也是用来限制在反向时一个施加的功率。
对于低转速电机,最大功率是有限的,为了便于低反电动势的电压 检测,允许的最大功率可以通过启动功率这个参数来设置。
(Motor timing ):2. 进角 进角可设置为 低/中低/中/中高/高,分别对应0°/7.5°/15°/22.5°/30°进角。
通常设置中进角即适用于大部分电机,但如果电机运转不顺畅时,可以尝试改变进角。
对于一些高感电机,其换向退磁时间较长,尤其在低速运转的时候,电机会在油门快速增加的情况下停转或者不顺畅。
将进角改高点会有有助于改善这 个现象,因为高进角允许更长的换向退磁时间。
(Demag compensation ):3. Demag 补偿 Demag 补偿是防止电机由于换向引起停转的一个功能,典型的现象是在快速增加油门时电机停转或不顺畅,尤其在低转速运行时。
如前面所述,设置高 进角可以帮助改善,但有可能降低效率。
弗瑞特SR系列说明书

SR系列操作手册智能型阀门电动执行机构Freet Fluid Control Co.,Ltd注意:安装使用前,请确保认真完整地阅读和理解了本手册!SR系列执行器是一种新型的全智能电动阀门执行器,它不仅采用了独特的双密封结构,而且对于所有参数均可利用红外线设定器进行非侵入式设置。
独有的多项措施保证了SR执行器的安全性、可靠性和方便性。
本手册将介绍SR执行器的准备、安装、设置(包括对执行器的一级设定和二级设定)和故障诊断功能,目的是帮助用户更好地使用、维护SR执行器。
所有SR系列执行器符合以下标准:1.JB/T 8219-1999 工业过程测量和控制系统用电动执行机构2.GB4208-1993 外壳防护等级(IP代码“IP68”)SR防爆型执行器符合以下标准:1.GB3836.1-2000 爆炸性气体环境用电气设备“通用要求”2.GB3836.2-2000 爆炸性气体环境用电气设备隔爆型“d”目录1安全准则 (7)2SR 执行器的基本结构 (8)3SR 执行器的基本操作 (9)3.1手动操作 (9)3.2电动操作 (9)选择就地/停止/远程操作 (9)就地操作 (9)远程控制 (10)3.3视窗 (10)阀位状态指示灯 (10)液晶显示屏状态图标 (11)初始工作界面 (12)参数设置 (13)帮助界面 (14)4准备驱动轴套 (14)4.1SR执行器可配驱动轴套 (14)SR10、12、15、20、25、30及35型执行器的联轴器 (14)SR40、SR45型执行器的联轴器 (15)4.2力矩型驱动轴套的拆卸和装配 (15)4.3SR10-SR30配套推力型驱动轴套的拆卸和装配 (15)4.4SR40-SR45配套推力型驱动轴套的拆卸和装配 (16)5安装执行器 (16)5.1将执行器安装到丝杆驱动的阀门上 (17)5.2将执行器安装到键驱动的阀门上 (17)5.3手轮密封 (18)6.1地线连接 (18)6.2卸下端子箱盖 (18)6.3电缆入口 (18)6.4连接端子 (18)6.5重新安装端盖 (18)7准备设置SR 执行器 (19)7.1红外线设定器 (19)设置模式下红外线设定器的按键说明 (19)特殊操作的按键 (19)电池安装 (20)7.2登录执行器 (20)7.3查阅模式 (20)7.4设置/查阅模式下的画面 (20)8菜单结构 (21)8.1执行器菜单项说明 (21)9执行器的初级设定 (24)9.1浏览初级功能的设定 (24)对密码的操作 (24)对阀门的基本设置 (25)阀门力矩参数的设置 (27)阀门位限值的设置 (28)返回正常工作界面 (30)10执行器的二级设定 (30)10.1二级功能的进入 (30)10.2二级功能的设定 (30)指示触点S1、S2、S3、S4 (30)指示触点SF (32)10.3控制方式组态 (32)A1:ESD使能 (33)A2:ESD的方向 (33)A3:ESD的控制形式 (34)A4:ESD旁路温度保护 (34)A5:ESD旁路联锁控制 (35)A6:ESD旁路就地停止 (35)A7:自维持设置 (36)A8:开关优先设置 (36)A9:联锁控制设置 (36)A T:力矩旁路设置 (37)10.4附加指示触点 (37)附加指使触点的设置 (37)10.5模拟控制菜单设置 (38)OI:阀位反馈设置 (38)FI:控制信号类型 (38)F R:信号控制范围 (39)FL:信号低点对应阀位 (39)FH:信号高点对应阀位 (39)F D:死区设置 (40)F T:模拟控制延迟 (40)FF:丢失信号动作 (41)10.6断续运行定时器菜单显示 (41)JE:断续运行定时器使能 (41)JD:断续运行定时器开关阀方向使能 (42)JC:断续运行定时器关阀位限设定 (42)JO:断续运行定时器开阀位限设定 (42)JN:断续运行定时器运行时间设置 (43)JF:断续运行定时器停止时间设置 (43)JS:ESD旁路断续运行定时器 (44)10.7其它控制设置 (44)OS:电源掉电禁止操作 (44)O R:设定器控制设置 (44)OL:红色指示灯对应位限 (45)10.8初始设置 (45)D1:初始设置1 (45)D2:初始设置2 (48)11执行器维护和故障排除 (48)12执行器的接线端子示意图 (50)13 SR 执行器接线图 (54)14SR 执行器的帮助菜单 (55)1安全准则用户在对SR执行器进行安装、操作、设置及检查之前,应仔细阅读这本用户手册,这有助于以最有效的方式安装和使用SR执行器。
PCI-1240运动控制卡快速入门手册解析
PCI-1240运动控制卡快速入门手册解析PCI-1240快速入门手册目录第一章PCI-1240 安装1.1 1.2 PCI-1240 Driver 与Utility 安装PCI-1240 硬件安装第二章PCI-1240 与驱动器接线2.1 PCI-1240 针脚描述2.2 PCI-1240 与驱动器连接第三章PCI-1240 测试3.1 PCI-1240 Utility 使用第四章PCI-1240 软件编程4.1 PCI-1240 软件编程第五章附录1. PCI-1240 Utility 界面说明:第一章PCI-1240安装1.1 PCI-1240 Driver与Utility安装在使用pci-1240 之前必须安装pci-1240 驱动,驱动安装步骤:A) 将研华提供的驱动光盘置于光驱中,出现如下画面:B) 点击Installation 选项,出现如下画面:C) 点击Individual Driver,出现如下画面:D) 选择Motion Control Cards 中选项PCI-1240,点击安装PCI-1240 驱动;1.2 PCI-1240 硬件安装:1) PCI-1240 跳线设置:I. BoardID 设置:通过设置板卡上DIP 开关可以设置PCI-1240的BoardID 从0-15。
II. JP1~8 设置nP+P,nP+N 和nP-P,nP-N 输出引脚为+5v 输出还是差分输出,缺省设置为差分输出;如图所示:注意:设置为+5v单端输出时,要防止外部噪声窜入PCI-1240.III. JP9 Enable/Disable 紧急停止功能,如图所示:2) 单块板卡安装:I. 关闭计算机电源;II. 将PCI-1240 卡插在计算机的任一PCI 槽上;III. 重新开启计算机,系统会自动寻找到PCI-1240,根据提示点击Next 添加PCI-1240 驱动;3) 多块板卡安装:I. 将板卡的BoardID DIP 开关设置成不同的值(不能有重复);II. 先将一块板卡插在一PCI 槽,根据单块板卡安装方法,添加驱动;III. 然后关机,根据单块板卡安装方法,依次安装其他板卡。
Modicon Premium自动化平台的TSXCAY41运动控制模块说明书
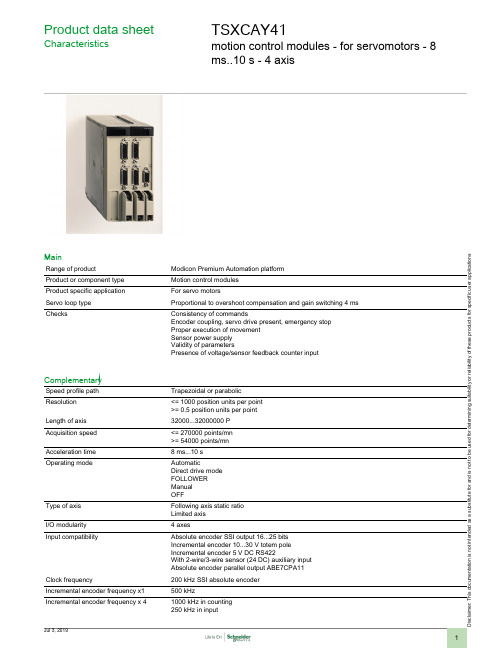
Product data sheetCharacteristicsTSXCAY41motion control modules - for servomotors - 8ms..10 s - 4 axisMainRange of productModicon Premium Automation platform Product or component type Motion control modules Product specific application For servo motorsServo loop type Proportional to overshoot compensation and gain switching 4 ms ChecksConsistency of commandsEncoder coupling, servo drive present, emergency stop Proper execution of movement Sensor power supply Validity of parametersPresence of voltage/sensor feedback counter inputComplementarySpeed profile path Trapezoidal or parabolic Resolution <= 1000 position units per point >= 0.5 position units per point Length of axis 32000...32000000 P Acquisition speed <= 270000 points/mn >= 54000 points/mn Acceleration time 8 ms...10 s Operating modeAutomaticDirect drive mode FOLLOWER Manual OFFType of axis Following axis static ratio Limited axis I/O modularity 4 axesInput compatibilityAbsolute encoder SSI output 16...25 bits Incremental encoder 10...30 V totem pole Incremental encoder 5 V DC RS422With 2-wire/3-wire sensor (24 DC) auxiliary input Absolute encoder parallel output ABE7CPA11Clock frequency200 kHz SSI absolute encoder Incremental encoder frequency x1500 kHzIncremental encoder frequency x 41000 kHz in counting 250 kHz in inputi s c l a i m e r : T h i s d o c u m e n t a t i o n i s n o t i n t e n d e d a s a s u b s t i t u t e f o r a n d i s n o t t o b e u s e d f o r d e t e r m i n i n g s u i t a b i l i t y o r r e l i a b i l i t y o f t h e s e p r o d u c t s f o r s p e c i f i c u s e r a p p l i c a t i o n sPower dissipation in W10...17 WInput type Current sink auxiliary input conforming to EN/IEC 1131 Type 2Resistive counter inputResistive servo drive control input conforming to EN/IEC 1131 Type 1Input logic PositiveInput voltage24 V 8 mA auxiliary input24 V 8 mA servo drive control input5 V 18 mA counter inputInput voltage limits<= 5.5 V counter input19...30 V auxiliary input19...30 V servo drive control inputVoltage state 1 guaranteed>= 11 V auxiliary input>= 11 V servo drive control input>= 2.4 V counter inputCurrent state 1 guaranteed>= 3.5 mA servo drive control input>= 3.7 mA counter input>= 6 mA auxiliary inputVoltage state 0 guaranteed<= 1.2 V counter input<= 5 V auxiliary input<= 5 V servo drive control inputCurrent state 0 guaranteed<= 1 mA counter input<= 1.5 mA servo drive control input<= 2 mA auxiliary inputInput impedance270 Ohm counter input3000 Ohm auxiliary input3000 Ohm servo drive control inputNumber of outputs 4 analogue output static4 reflex output static conforming to EN/IEC 611314 servo drive validation output relayAnalogue output range+/- 10...24 VAnalogue output resolution13 bits + signLSB value 1.25 mV analogue outputOutput voltage24 V DC reflex output24 V DC servo drive validation outputOutput voltage limits19...30 V reflex output5...30 V servo drive validation outputNominal output current0.5 A reflex outputMaximum output current 1.5 mA analogue output200 mA servo drive validation output625 mA reflex outputMinimum load 1 mA 1 VVoltage drop< 1 V at state on reflex outputLeakage current< 0.3 mA reflex outputSwitching time< 5 ms for servo drive validation< 500 µs for reflex outputOutput compatibility Positive logic DC inputs (resistance <= 15 kOhm) reflexShort-circuit protection Current limiter reflex outputThermal tripping reflex outputOutput overload protection Current limiter reflex outputThermal tripping reflex outputOutput overvoltage protection Zener diode between outputs and 24 DC reflex outputReverse polarity protection Reverse diode on supply reflex outputLocal signalling 4 LEDs green axis diagnostics available1 LED green module operating (RUN)1 LED red external fault (I/O)1 LED red internal fault, module failure (ERR)Electrical connection 1 connector HE-10 20 pins for servo drive ctrl inputs + for ext power supply of servo drive inputs/outputs1 connector SUB-D 9 for an analogue output (speed reference)3 connectors HE-10 20 pins for aux inputs, reflex output, for external sensor and preactuator powersupply4 connectors SUB-D 15 for an incremental or absolute encoderCurrent consumption1500 mA 5 V DC30 mA 24 V DC22...40 mA 24 V DC on 10/30 V absolute encoder moduleModule format DoubleProduct weight0.61 kgEnvironmentProtective treatment TCAmbient air temperature for operation0...60 °CAmbient air temperature for storage-25...70 °CRelative humidity 5...95 % without condensationOperating altitude<= 2000 mOffer SustainabilityRoHS (date code: YYWW)Compliant - since 0804 - Schneider Electric declaration of conformitySchneider Electric declaration of conformityREACh Reference not containing SVHC above the thresholdReference not containing SVHC above the thresholdProduct end of life instructions Need no specific recycling operationsContractual warrantyWarranty period18 months。
SR电动执行机构安装调试说明书

A2:ESD的方向28
A3:ESD的控制形式28
A4:ESD旁路温度保护29
A5:ESD旁路联锁控制29
A6:ESD旁路就地停止30
A7:自维持设置30
A8:开关优先设置30
A9:联锁控制设置31
At:力矩旁路设置31
10.4附加指示触点32
附加指使触点的设置32
10.5模拟控制菜单设置32
只有在接线时,才需要打开SR执行器端子室的盖子,SR执行器所有参数的设置都可以通过红外线设定器或双线控制系统完成,无论在正式安装后或存放时设置执行器的参数,都不需要打开任何盖子。由于用户在现场打开电子和电气箱盖而使执行器受到损坏,SKVAL将不承担任何责任。
注意:在有爆炸气体环境中切勿开盖。
在爆炸危险场所,用户对SR执行器的检查和维修也应符合本国的有关安全规定。在任何情况下,不允许自行对执行器的结构或元部件作改动,这些改动可能导致已获得的防爆认证和其他保证失效;如果执行器已接通交流电源,则不允许用导电的物体接触执行器导电的部件。如果需要对执行器进行维护或维修,必须先断掉电源,将执行器卸下并移到安全区域进行维护或维修。
SR执行器采用了双密封结构和O形圈密封,密封等级可以达到IP68。出厂时,SR执行器的电缆入口由带螺纹的堵头密封,在接线前保证执行器端子室免受水气浸蚀。如果执行器不能够立刻安装,建议将其保存于干净、干燥、温度波动范围小的地方。
每一台SR执行器在出厂前都已经过全面测试,如果安装、接线、设置和密封都正确,SR执行器可以多年无故障运行。
在对SR执行器进行现场安装和接线时,应按照国际或本国的有关规范,对电缆进线口进行恰当的密封。所有临时性的堵头都应被换掉,并按有关规范密封好未使用的电缆进线口。
COMBO-XRotor-X11-14S无刷动力系统用户手册说明书

Voltage(V)工作电压Propeller螺旋桨Throttle(%)油门Thrust(g)拉力Current(A)电流Power(W)输入功率Speed(RPM)转速Efficiency(g/W)效率54V (14S LIPO)41*13.5InchFoldablePropeller40%886015.7850.6190910.442%968018.1979.519989.944%1076021.41160.221119.346%1151023.91291.221868.948%1240026.81450.922718.550%1275028.01514.623038.452%1401532.31748.824168.054%1540037.22010.525317.756%1638540.72199.726087.458%1733544.12384.926797.360%1886549.82691.127897.062%1938551.72797.82825 6.964%2077557.23092.12919 6.766%2187561.73336.22992 6.668%2309067.03620.13071 6.470%2453073.63979.83164 6.272%2563579.14275.13236 6.074%2627582.44454.53277 5.976%2763589.94857.63365 5.778%2883096.95236.93441 5.580%30290106.15732.43533 5.3100%33970131.77112.83741 4.8【保护功能】1)启动保护:当正常接电时电调首先启动自检,自检成功则可正常鸣叫后运行,若自检不通过则无法启动同时闪灯警示。
2)堵转保护:当电调检测到电机发生堵转时,电调会彻底关闭输出并不再尝试重启电机,此时需重新上电方可清除错误并重启电调恢复动力输出。
赛宝仪器 SR-10000D 程控直流电源 使用说明书
赛宝仪器使用说明书Ver3.0广州赛睿检测设备有限公司前言使用须知用户在使用该产品前需认真阅读使用说明书,必须遵守本使用说明书所规定的操作方法来使用产品,以免损坏该产品。
注意事项●本公司遵循可持续发展战略,保留对本说明书的内容进行改进不予先通知的权力。
●如有缺页、错页和丝印问题,本公司将负责更换。
●阅读本手册后,请妥为保存。
产品校验本公司特别声明,该产品在出厂前已经通过本公司的厂内数据校验和功能验证,校验的程序和步骤是符合电子检验中心的规范和标准。
该产品建议每年至少计量校准一次。
产品品质本公司保证所生产制造的产品均经过严格的品质确认,同时保证在发货之日起一年内,如有发现产品的材料和工艺方面的缺陷,证实后,本公司负责免费给予修复。
但是如果使用者有自行更改电路、功能、或进行修理仪器及零件或外箱损坏等情况,产品保修期则自动失效,本公司恕不提供免费保修服务。
使用未经本公司认可的零件或附件也不给予保修,如发现送回检修的产品被更改,我公司会将产品的电路或零件修复回原来设计的状态,并收取修护费用。
本保证不含本仪器的附属设备等非我公司所生产的附件。
在一年的保修期内,请将故障机组送回本公司设备生产部维修组,本公司会予以妥善修护。
如果本机组在非正常的使用下、或人为疏忽、或非人力可控制下发生故障,例如地震、水灾、暴动、或火灾等非人力可控制的因素,本公司不予免费保修服务。
SR程控电源系统型号命名试验参数上限系统VA系数代号电源系列代号著作权本使用说明书的著作权归广州赛睿检测设备有限公司所有。
未经广州赛睿检测设备有限公司的书面同意,任何单位、个人无权将使用说明书用于商业行为。
安全规定详细阅读下列安全性预防措施,以避免人身伤害,并防止损坏本产品及与本产品所连接的其他任何产品。
说明书和产品中的术语本说明书和产品中可能出现以下术语:警告:“警告”声明指出可能会造成人身伤害或危及生命安全的情况或操作。
注意:“注意”声明指出可能对本产品或该产品所连接的其他产品造成损坏的情况或操作。
YAMAHA SR1-X Robot使用说明
YAMAHA单轴、双轴和三轴ROBOT使用的软件
POPCOM
本公司的光牒里都有POPCOM的英语和日语版的安装文件,无须 注册可直接安装。
打开POPCOM后,有三个选择。
选择“Connect Robot Controller”后,进入下面窗口选择通讯口。
主页面
手动页面
按“GO”执行动作。
系统操作
SRVO SRVO
执行伺服的NO/OFF 1 (伺服状态)
STOP 程序执行的暂时中断 STOP ORGN 执行回原点动作 ORGN TON 执行指定机动号码 TON 1,1,1 (机动号码,程序号,起动类型) TOFF 停止指定机动号码 TOFF 1 (机动号码) JMPP 轴的位置关系和指定条件相同时跳跃到指定标签 JMPP 1,1 (标签号,轴的位置条件)
YAMAHA的通讯语言
• • • • • • • • @ORGCRLF: @RESETCRLF: @RUNCRLF: @SRUNCRLF: @SRVO 0(1) CRLF: @X+(-) CRLF: @MOVA 1,100CRLF: @MOVI 1,100CRLF: 回原点 复位 启动 步进 伺服OFF(ON) 滑块前进(后退) 以100%速度移到点1 以100%速度移动点1 的数字距离
I/O监控 效用设置
监控
在线编辑
程序号
编写程序
选择 “Function” 可以浏览 到所有的 指令。
在线编辑 编辑点数据
YAMAHA的编程语言
MOVA 往点资料的位置移动,以原点为基准的绝对值 MOVA 1,100 MOV I (点号码,速度) 仅从现在位置起移动点号码所指定的资料量的距离
注解 1 1,100 100 2,100 100 1,0 定义标签1 移动到P1点 等待1秒 移动到P2点 等待1秒 跳转到0号程序的1号标签
西电机工业电机与控制器型号L-41电子互锁说明书

EvBJt.Y HousB NBBDs WBsTINGHousB
I
RENEWAL PARTS DATA 24-447
I
JANUARY, 1937
WESTINGHOUSE INDUSTRIAL MOTORS AND CONTROLLERS
PAGE 2
The interlock base is secured directly to the contactor panel or mounting plate, employing studs for insulation panel mounting or machine screws inserted from the rear for LINESTARTER on steel plate mounting. The threaded holes provided in the interlock base to receive the mounting screws or studs are completely insulated from current-
Extra Terminals
For the convenience of the user, the interlock base is provided with holes to receive extra terminals (22, F1g. 1), insulated from current-carrying parts and from ground. These will be found especially useful when it is desired to operate the contactor coil from a separate control circuit, or when unusual master switch connections are to be made.
WT0382RS说明书内容 (2)

一、产品简介WT0382R系列角行程电子式电动执行器有以AC220V单相电源(※注:AC220V单相电源执行器型号为WT0382R–I)及AC380V三相电源(※注:AC380V三相电源执行器型号为382R–II)为驱动电源的机型。
本新型执行器接受来自调节器控制信号(DC4/0~20mA、DC2/0~10mA、DC1/0~5V、DC2/0~10V、开关触点信号或RS485总线信号),实现预定角位移(0°~90°)运动的新型执行器。
本系列执行器被用作调节阀的执行机构时,具备了调节阀本身所要求的各种动作变换功能及手动操作功能。
因此被广泛应用于发电、冶金、石化、轻工及环保等工业部门。
※本系列执行器有以下主要特点:1.1.执行器设计有伺服系统(无需另配伺服放大器),只需接入对应的电源、信号(DC4/0~20mA、DC2/0~10mA、DC1/0~5V、DC2/0~10V、开关触点信号或RS485总线信号)即可工作,内设接线端子,接线极为简单方便。
1.2.执行器的关键部件——控制器,是以工业级单片机为核心、以点阵液晶屏为显示器件的智能模块。
控制器采用了高效的控制策略,可实现阀门开度的快速精确定位。
控制器的控制输入方式多样,有模拟量、数字量、开关量及按钮。
点阵液晶显示屏可以实时显示当前阀位、输入信号、报警信息、运行方式、内部温度以及运行参数和操作提示。
用户可以使用面板按键或红外线遥控器方便地设置运行参数、标定阀位及手动操作阀门。
阀位反馈检测接口与电位器配接。
控制器接线方便、操作简单、功能丰富、性能稳定、可靠性高。
1.3.阀门开度检测采用高性能导电塑料电位器,分辨率<0.4﹪。
1.4.具备自诊断功能,当发生故障时,控制器会立即发出声光报警,并显示报警信息。
1.5.通过设置界面设定断信号时阀芯位置。
1.6.通过设置界面设定正、反动作,电开、电关。
1.7.通过设置界面选择输入信号形式:模拟量信号(DC4/0~20mA、DC2/0~10mA、DC1/0~5V、DC2/0~10V)、开关触点信号或RS485总线信号。
SR1、SR3说明书

某加热系统,仪表选用SR3-8P-1,K型热偶0.0~800.0℃输入,P型输出接固态继电器。设定温度为600.0℃,EV1上限绝对值报警值650.0℃,EV2下限绝对值报警值550℃,报警为上电抑制。设置步骤如下:
1)在[1-22]窗口,将传感器量程代码设定为:05(K型热偶0.0~800.0℃) 。
5)控制输出的人工补偿系数Mr:[1-6]窗口
功能1:PID调节时,积分参数I=OFF时(比例参数P≠OFF),用于替代积分作用,消除系统静差。功能2:PID调节时,用于确定初始调节输出值。Mr的设定范围为:-50~50%。
七.现场保护用的数字锁功能KEY LOCK:
在完成工作参数的调整后,可在[1-1]窗口设定三种方式的参数保护:
测量值显示补偿:传感器经标定后的线性误差和因安放位置引起的测量误差,可在[1-20]窗口“PV_b”设置正负偏移量作为测量值PV的显示补偿。范围:
-1999~2000个数字,出厂值为(0)。 请不要随便设定,避免测量误差。
滤波时间常数:在[1-21]设置测量值PV的一阶数字滤波时间常数。范围:1~100秒,出厂值O,无滤波。数值越大,滤波越强,但影响测量速度。具体值现场确定。 请不要随便设定避免影响系统的调节速度。
●输入为铂电阻时,三线制,引线电阻不得大于5Ω,三条引线阻值相同。
●其它输入时,为了避免噪音和干扰,引线使用屏蔽电缆,要求一点接地。
●与仪表端子的接线建议使用标准压接型接线片(适用于3.5毫米螺丝)。
●输入和输出信号线应远离动力电缆,不得使用同一电缆管。
●仪表的接地端必需良好接大地。
⒋仪表抗干扰的措施:开关电源设计,10VA,工作电压100~240VAC。
Eaton EPCT Fire Touchscreen电子火泡泵控制器产品说明说明书

Eaton EPCT FireT ouchscreen based electric fire pump controllers30Product DescriptionThe EPCT Fire features an advanced, 7” color touchscreen that incorporates both the fire pump controller (FPC) and automatic transfer switch (ATS) functionality into one, intuitive display. Designed solely with the consumer in mind, the EPCT Fireenables technicians to commission the fire pump controller faster; troubleshooting is made easier and is more effective through the use on-screen history filtering and diagnostic monitoring.All full-service fire pump controllers can be offered in either full-voltage or reduced voltages starting methods:• FD/FT20 - Limited service• FD/FT30 - Across-the-line• FD/FT40 - Part winding• FD/FT50 - Primary resistor• FD/FT60 - Autotransformer• FD/FT70 - WYE-Delta (Star-Delta) open transition• FD/FT80 - WYE-Delta (Star-Delta) closed transition• FD/FT90 - Soft startProduct FeaturesT ouchscreen DisplayGeneralSpeed of commissioning, configuration and troubleshooting are more critical to businesses today more than ever. Through theuse of a 7” touchscreen, users can easily program all site specific setpoints through an intuitive menu structure, view all critical system information, and troubleshoot quickly and accurately via on-screen diagnostics.Automatic Transfer Switch IntegrationGoing away from the multiple screen approach, the EPCT Fire touchscreen integrates both the Fire Pump Controller and Automatic Transfer Switch into one display enabling the user to effectively manage programming and operation from one source. Commissioning SimplifiedThe Startup tab features all controller related commissioning tasks such as: Quick Setup, Setup Phase Reversal, Flow Test, Manual/ Automatic Starts, and Test Alarms.UL Type RatingThe touchscreen display has been tested in accordance with UL and achieves a type 4X rating.Programming MenuStartup tabThis tab system enables the user to complete all controller related commissioning tasks. Each sub-menu within the Startup tab guides the user through step-by-step, intuitive screens to quickly and effec-tively complete the startup and commissioning process.Panel Setup tabAll variables relating to the panel, such as language, date and time, nominal voltage, etc., are located in the Panel Setup tab. For all programming points within the Panel Setup tab, refer to the instruc-tion manual: MN124016EN.Help tabThe help tab provides end users service contact information from the company that commissioned the unit (if programmed), factory contact information, and a QR code to download the instruction manual onto a mobile device.Pressure Settings tabContains a variety of pressure settings that may be programmed to suit site requirements. Some key settings include: Start Pressure, Stop Pressure, Low Pressure Alarm, High Pressure Alarm, Low Suction Shutdown, Low Foam Shutdown, Pressure Units, and the ability to calibrate the transducer.Timer Values tabThis tab system contains the programming point for all fire pump controller related timers. These timers are: Minimum Run Time, Acceleration Time, Sequential Start Time, Fail to Start Time, Fail to Stop Time, and Weekly Motor Test Timer.ATS Settings tab (if equipped)The ATS Settings tab will only be enabled on units equipped with an automatic transfer switch. Programming points within this tab only pertain to the operation of the transfer switch.Alarm Setpoints tabThere are seven (7) programmable alarm points within this tab system: Phase Reversal, Phase Failure Alarm Setpoint, Motor Overload Setpoint, Transducer Fail Pump Start, Abort Motor Test on Low Voltage, Voltage Alarm Settings, and Frequency Alarm Settings. Inputs/Outputs tabThe I/O board is capable of accepting ten (10) custom inputs that can be programmed for seventeen (17) predefined conditions. The output relays can be programmed for sixty-one (61) separate condi-tions. Additional relays can be added through the use of a single or multiple optional relay boards.History/Statistics/Diagnostics tabThis tab system allows the customer/technician to view historical data, controller statistics, controller diagnostics, and startup informa-tion. To assist, the controller can filter for specific events or between certain dates to speed up troubleshooting.I/O BoardPower SupplyThe redesigned I/O board is equipped with a full voltage power supply capable of accepting voltage inputs between 200-600VAC three phase, or 240VAC single phase.Customer Input ConnectionsConnection terminals are provided at the top of the I/O board for external customer connections that can be programmed through the touchscreen display.Output RelaysThe I/O board features four (4), 250VAC, 8A, 2 Form-C relays desig-nated for the following: Common Alarm, Power/Phase Failure, Phase Reversal, and Pump Run. Each relay socket has a surface mount LED to indicate the relay’s coil status.Optional BoardsThe controller can accept up to four (4) additional option boards: optional relay board, MODBUS communication board, secondary4-20mA device board, and an alarm board. The controller has provi-sions to allow future optional boards to be added with plug-and-play functionality.2EATON - EPCT Fire Pump ControllersOther ComponentsDrain Valve SolenoidAll full-service EPCT Fire controllers are equipped with a drain valvesolenoid used for manual or automatic motor tests.External USB PortThe USB port allows the user to download historical messages,statistics, diagnostic information, startup file, and current controllerconfiguration to any USB device with FAT16 or FAT 32 formatting.EnclosuresThe EPCT Fire controllers come standard with UL type 2 (drip-proof)enclosures. Optional enclosures are available and include: type, 3, 3R, 4, 4X, and 12.Emergency Start Operator A mechanically operated emergency start handle (ESH) will mechani-cally activate the motor contactor(s) independently from any electri-cal control circuits.Standards & Certifi cations All EPCT Fire full-service, electric fire pump controllers meet or exceed the requirements of Underwriters Laboratories and Underwriters Laboratories Canada [UL218 and UL1008], Factory Mutual, the Canadian Standards Association, New Y ork City building code, CE mark, U.B.C./C.B.C. seismic requirements, and are built to the latest edition of NFPA 20 standards. The EPCT Fire electric fire pump controllers are suitbale for use as service entrance equipment- does not meet CEC requirements for Canada.Display ScreensHome tab - without ATSHome tab - with ATS Common Alarm SettingsNotification Area Settings Message History Customer Service Contact3EATON - EPCT Fire Pump ControllersFollow us on social media to get thelatest product and support information.Eaton is a registered trademark. All other trademarks are property of their respective owners.Eaton1000 Eaton BoulevardCleveland, OH 44122United StatesElectrical SectorCanadian Operations5050 MainwayBurlington, ON L7L 5Z1CanadaEatonCanada.ca© 2018 EatonAll Rights ReservedPrinted in CanadaPublication No. BR124053EN / 001January 201812.61 [320]34.50 [876]28.00 [711]16.00 [406]10.50 [267] 6.00 [152]5.25 [133]2.63 [67]59.97 [1523]50.00 [1270]47.97 [1218]12.00 [305]5.00 [127]8.42 [214]1.14 [29]3.32 [84]19.28 [490]1.22 [31]PIPING ENTRANCE 1/2" NPT - FEMALE PIPING ENTRANCE 1/2" NPT - FEMALE 123456Motor HPL in e voltage Withs tan d rating Stand ard Interm ediate High 5 - 40200 - 208V 100,000150,000200,000270 (123)5 - 50220 - 240V 5 - 75380 - 415V 5 - 100440 - 480V 5 - 100550 - 600V 25,000100,000Ap pro xim ate weig ht L bs. (K g )7 3.29 [84]8.38 [213]4.24 [108]2.09 [53]9891 - EPCT TOUCHSCREEN2 - EXTERNAL USB PORT3 - MAIN POWER SWITCH4 - START PUSHBUTTON5 - STOP PUSHBUTTON6 - MSH (EMERGENCY START HANDLE)7 - RECOMMENDED CABLE ACCESS (BOTTOM ONLY)8 - LOCKABLE QUARTER-TURN9 - STANDARD QUARTER-TURNNOTES:1 - DIMENSIONS: in [mm]2 - ALL ENCLOSURES FINISHED IN RED3 - STANDARD ENCLOSURE: TYPE (NEMA) 2THE INFORMATION ON THIS DOCUMENT IS CREATED BY EATON. IT IS DISCLOSED IN CONFIDENCE AND IS ONLY TO BE USED FOR THE PURPOSE INWHICH IT IS SUPPLIED.LES RENSEIGNEMENTS CI-DESSUS ONT ÉTÉ ÉLABORÉS PAR EATON. ILS VOUS SONT DIVULGUÉS EN TOUTE CONFIANCE ET LEUR UTILISATION SE LIMITEAUX SEULES FINS POUR LESQUELLES ILS VOUS SONT TRANSMIS.DATE DRAWING NO.REVISION CE16490H1710/05/23003Motor HPL ine voltage Withstand rating Standard Interm ediate High 50 - 150200 - 208V 100,000150,000200,000655 (296)60 - 200220 - 240V 100 - 300380 - 415V 125 - 400440 - 480V 125 - 400550 - 600V 25,000100,000Approxim ate weight L bs. (K g)17.65 [448]54.83 [1393]16.02 [407] 6.00 [152]12.24 [311]1.90 [48]Ø1.75 [Ø44]43.25 [1099]74.00 [1880] 62.00 [1575]12.00 [305]5.00 [127]14.00 [356]1.37 [35]3.35 [85]34.30 [871]1.11 [28]PIPING ENTRANCE 1/2" NPT - FEMALE PIPING ENTRANCE 1/2" NPT - FEMALE 12345611.26 [286] 3.29 [84]17.19 [437]9891 - EPCT TOUCHSCREEN2 - EXTERNAL USB PORT3 - MAIN POWER SWITCH4 - START PUSHBUTTON5 - STOP PUSHBUTTON6 - MSH (EMERGENCY START HANDLE)7 - RECOMMENDED CABLE ACCESS (BOTTOM ONLY)8 - LOCKABLE QUARTER-TURN9 - STANDARD QUARTER-TURNNOTES:1 - DIMENSIONS: in [mm]2 - ALL ENCLOSURES FINISHED IN RED3 - STANDARD ENCLOSURE: TYPE (NEMA) 2THE INFORMATION ON THIS DOCUMENT IS CREATED BY EATON. IT IS DISCLOSED IN CONFIDENCE AND IS ONLY TO BE USED FOR THE PURPOSE INWHICH IT IS SUPPLIED.LES RENSEIGNEMENTS CI-DESSUS ONT ÉTÉ ÉLABORÉS PAR EATON. ILS VOUS SONT DIVULGUÉS EN TOUTE CONFIANCE ET LEUR UTILISATION SE LIMITEAUX SEULES FINS POUR LESQUELLES ILS VOUS SONT TRANSMIS.DATE DRAWING NO.REVISION CE16490H1810/05/23003Line Voltage200-208220-240380-415440-480575-600Line Lugs (QTY.) & Cable Size per Ø Service Ground Lugs (QTY.) & Cable Size per ØMax HP 2530406075(1) #14 - 1/0 (CU/AL)(1) #14 - 2/0 (CU/AL)405075100100(1) #4 - 4/0 (CU)(1) #4 - 350MCM (CU/AL)7575150200200(1) #3 - 350MCM (CU/AL)(1) #4 - 350MCM (CU/AL)100125200250300(2) 3/0 - 350MCM (CU/AL)(2) 1/0 - 750MCM (CU/AL)150200300400500(2) 250 - 350MCM (CU/AL)(2) 1/0 - 750MCM (CU/AL)Line Voltage200-208220-240380-415440-480575-600Single Run Cable Sizes Double Run Cable Sizes Max HP 1010152025#14 - #8 (CU/AL)#14 - #8 (CU/AL)2025305060#14 - #1 (CU/AL)#14 - #2 (CU/AL)406075125100#8 - 3/0 (CU/AL)#8 - 2/0 (CU/AL)75100150200200#2 - 750MCM (CU/AL)1/0 - 250MCM (CU/AL)1502003004005001/0 - 500MCM (CU/AL)1/0 - 500MCM (CU/AL)For ambient temperatures exceeding 30C (86F), the temperature rating of motor conductors is recommended to be a minimum of 90C (194F)For proper cable size, refer to the National Electric Code (NEC - NFPA70)Line Terminals ConnectionsLoad Terminals ConnectionsEaton is a registered trademark.All other trademarks are property of their respective owners.EatonCanadian Operations5050 MainwayBurlington, ON L7L 5Z1P: 1-877-860-7955E-mail:*********************Web: © 2019 Eaton All Rights Reserved Printed in Canada Publication No. PS124001EN / 001Article No. XXXXXX February 2019EPCT Fire option selection matrixEPCT Fire electric fi re pump controllers Typical specifications1. ApprovalsA. The Fire Pump Controller shall meet therequirements of the latest edition of NFPA 20 andshall be listed by [Underwriters Laboratories (UL)]and approved by [Factory Mutual Research (FM)][Canadian Standards Association (CSA)] [New Y orkDepartment of Buildings (NYSB)] and carry the CEmarking for fire pump service.2. Starting typeA. The controller shall be of the combined manual andautomatic type designed for [Limited Service - 1Por 3P] [Full Voltage Starting] [Part Winding Starting][Primary Resistor Starting] [AutotransformerStarting] [Wye-Delta (Star-Delta) Open TransitionStarting] [Wye-Delta (Star-Delta) Closed TransitionStarting] [Solid State Soft Start Starting]3. R atingsA. The Controller shall have a withstand rating of100,000 RMS symmetrical amperes @ [208V][240V] [380V] [400V] [415V] [480V] [25,000@ 600VAC].B. Temperature:4 to +50 deg. C (39 to +122 deg. F)4. ConstructionA. The controller shall include a motor ratedcombination isolating switch and circuit breaker,mechanically interlocked and operated with asingle externally mounted handle.B. The isolating switch shall be rated to disconnectthe motor load.C. The isolating switch/circuit breaker combinationshall be mechanically interlocked such that theenclosure door cannot be opened when the handleis in the on position except by a tool operateddefeater mechanism.D. The controller manufacturer shall manufacturethe contactor, isolating switch, circuit breaker,pushbuttons, and enclosures. Brand-labeledcomponents will not be accepted.5. EnclosureA. The controller shall be housed in aType 2 (IEC IP11) drip-proof, powder baked finish,freestanding enclosure.B. Optional enclosures:1. Type 3R (IEC IP14) rain-tight enclosure2. Type 3 (IEC IP55) water-resistant enclosure3. Type 4 (IEC IP66) watertight enclosure4. Type 4X (IEC IP66) watertight 304 stainlesssteel enclosure5. Type 4X (IEC IP66) watertight 316 stainlesssteel enclosure6. Type 4X (IEC IP66) watertight corrosionresistant enclosure7. Type 12 (IEC IP52) dust-tight enclosure6. Microprocessor controlA. The controller shall come complete with a 7”,800x480, color touchscreen. The touchscreen shallbe type 4X rated.1. Home tab capable of displaying system pres-sure, three phase voltage and amperagereadings for both sources, system frequency,date, and time, configurable notifications in thenotification area, displaying current start andstop set points, and visual representation ofthe transfer switch position, source 2 discon-nect handle, and contactor.2. Virtual buttons to manually test the pumpmotor and/or the backup power supply engine.3. Controller statistics screen, including:A. Total Powered TimeB. Total Motor Run TimeC. Last Motor Run TimeD. Calls to StartE. Motor StartsF. Maximum Starting Current AG. Maximum Starting Current BH. Maximum Starting Current CI. Maximum Run Current AJ. Maximum Run Current BK. Maximum Run Current CL. Last LR Current AM. Last LR Current BN. Last LR Current CO. Minimum System PressureP. Maximum System PressureQ. Minimum S1 Voltage ABR. Minimum S1 Voltage BCS. Minimum S1 Voltage CAT. Maximum S1 Voltage ABU. Maximum S1 Voltage BCV. Maximum S1 Voltage CAW. Minimum S2 Voltage ABX. Minimum S2 Voltage BCY. Minimum S2 Voltage CAZ. Maximum S2 Voltage ABAA. Maximum S2 Voltage BCAB. Maximum S2 Voltage CAAC. Minimum S1 FrequencyAD. Maximum S1 FrequencyAE. Minimum S2 FrequencyAF. Maximum S2 FrequencyAG. Last System StartupAH. Last Motor StartAI. Last Low Pressure StartAJ. Last Locked Rotor TripAK. Last S1 Phase FailureAL. Last S2 Phase FailureAM. Last S1 Phase ReversalAN. Last S2 Phase ReversalAO. Last S1 UndervoltageAP. Last S1 OvervoltageAQ. Last S2 UndervoltageAR. Last S2 OvervoltageAS. Last S1 Under FrequencyAT. Last S1 Over FrequencyAU. Last S2 Under FrequencyAV. Last S2 Over FrequencyAW. Last Generator StartAX. Last Generator StopAY. Last transfer to S1AZ. Last transfer to S2BA. Last S2 Disconnect4. Controller diagnostics screen, including:A. Controller Serial NumberB. Logic Board Firmware VersionC. I/O Board Firmware VersionD. I/O Board Supply VoltageE. I/O Board CommunicationF. CT1 Secondary AmperageG. CT2 Secondary AmperageH. CT3 Secondary AmperageI. Transducer Input VoltageJ. Transducer Output CurrentK. Transducer Setpoint Current 2L. Transducer Setpoint Current 1M. All Input Status (Open or Closed) (Can beselected to override for one minute and manu-ally change the state of the input)N. All Output Relay Status (Energized orDe-energized) (Can be selected to overridefor one minute and manually energize orde-energize the relay)O. Test the display board’s communication.5. Archive message screen that will display up to65,000 alarms/messages stored in the controllers’memoryB. The microprocessor logic board shall be avail-able with a USB port for transference of messagehistory, controller status, diagnostics, startup andstatistic files and the ability to update firmware.C. A Fail-to-Start alarm shall occur if the motor controllersees less than 20% of the motor full load amps afteran adjustable time delay of 1-99 seconds.D. Locked rotor protection shall be provided. After a tripcondition and restoration of power, the display shallindicate the voltage, current, and date and time atthe moment that the controller tripped.E. A sequential start timer and weekly test timer shallbe provided as standard.F. A restart time delay of one (1) second shall beprovided to allow the residual voltage of the motor todecay prior to re-starting the motor. In the event thatthe pump motor continues to run after a request tostop, then the controller must display a fail to stopmessage to indicate this condition.G. Overvoltage (0-100%) and undervoltage (0-100%)sensing and alarming shall be provided as standard.H. The controller shall be supplied with interlock andshutdown circuits as standard. A green LED inthe notification area shall indicate an interlock oncondition.I. Where shutdown of the pump(s) due to low suctionpressure is required, it shall be accomplished withoutthe addition of a separate panel or enclosure.The display shall indicate low suction shutdown.Resetting of the condition shall be automatic ormanual as selected by the user.7. Programming MenuA. The programming menu shall have the ability toenable an entry password.B. The controller shall have nine (9) languages as a stan-dard: English, French, Spanish, Portuguese, Turkish,Italian, Dutch, Chinese, and Polish.C. The programming menu shall be grouped into ten(10) tabs as follows:1. Home2. Startup3. Panel Setup4. Help5. Pressure Settings6. Timer ValuesFire pump controllersFeaturesii EPCT FIRE ELECTRIC FIRE PUMP CONTROLLERS PS124004EN February 2019 Eaton is a registered trademark.All other trademarks are property of their respective owners.EatonCanadian Operations 5050 MainwayBurlington, ON L7L 5Z1P: 1-877-860-7955E-mail:*********************Web: © 2019 EatonAll Rights Reserved Printed in CanadaPublication No. PS124004EN / 001Article No. XXXXXX February 20197. ATS Settings 8. Alarm Setpoints 9. Inputs/Outputs10. History/Statistics/Diagnostics8. Pressure sensorA. A solid-state 4-20mA pressure sensor shall beprovided. The pressure Start and Stop points shall be adjustable in increments of one (1) PSI. 9. Custom inputs/outputsA. The controller shall come standard with ten(10) programmable inputs, four (4) programmedoutputs with the ability to add up to another sixteen (16) outputs via optional relay boards.B. The user shall be able to program the inputs/outputsthrough the main programming menu.C. The inputs shall be selectable based on thefollowing criteria:1. User selected message or seventeen (17)predetermined messages 2. Link to a future relay and/or LED indicator 3. Alarm latched until reset 4. Normally open or closed input 5. On and/or off-delay timerD. The future relays shall be selectable based on thefollowing criteria:1. Output based on a minimum of sixty-one (61)predetermined alarms, controller status or a custom input 2. Latched until reset3. Energized under normal conditions4. On and/or off delay timer on the output10. Alarm relaysA. All relays shall be soldered on the PCB. An LED onthe relay panel shall indicate the energized state of the relay. All relay contacts shall be rated @ 8A, 277VAC/30VDC. Two (2) sets of Form-C contacts shall be provided for each of the following:1. Common Alarm2. Power/Phase Failure3. Phase Reversal4. Pump RunB. The Common Alarm and Power/Phase Failure relaysshall be energized under normal conditions.11. Audible alarm buzzerAn audible alarm buzzer, capable of being heardwhile the motor is operating, shall operate if Fail to Start, Hardware Malfunction or any Common Alarm condition exists.12. ManufacturerA. The controller shall be of the EPCT Fire type asmanufactured by Eaton Corporation.Fire pump controllersFeatures。
Belimo SR24A-MP-R 通信式旋钮驱动电机说明书

SR24A-MP-RCommunicative RetroFIT+ rotary actuator forrotary valves and butterfly valves• Torque motor 20 Nm• Nominal voltage AC/DC 24 V• Control modulating, communicative 2...10 Vvariable• Position feedback 2...10 V variable• Communication via Belimo MP-Bus• Conversion of sensor signalsTechnical dataElectrical data Nominal voltage AC/DC 24 VNominal voltage frequency50/60 HzNominal voltage range AC 19.2...28.8 V / DC 21.6...28.8 VPower consumption in operation 3.5 WPower consumption in rest position 1.25 WPower consumption for wire sizing 6 VAConnection supply / control Cable 1 m, 4x 0.75 mm²Parallel operation Yes (note the performance data)Data bus communication Communicative control MP-BusNumber of nodes MP-Bus max. 8Functional data Torque motor20 NmOperating range Y 2...10 VInput impedance100 kΩOperating range Y variable Start point 0.5...30 VEnd point 2.5...32 VOperating modes optional Open/close3-point (AC only)Modulating (DC 0...32 V)Position feedback U 2...10 VPosition feedback U note Max. 0.5 mAPosition feedback U variable Start point 0.5...8 VEnd point 2.5...10 VPosition accuracy±5%Manual override with push-button, can be lockedRunning time motor90 s / 90°Running time motor variable90...350 sAdaptation setting range manual (automatic on first power-up)Adaptation setting range variable No actionAdaptation when switched onAdaptation after pushing the manual overridebuttonOverride control MAX (maximum position) = 100%MIN (minimum position) = 0%ZS (intermediate position, AC only) = 50%Override control variable MAX = (MIN + 33%)...100%MIN = 0%...(MAX – 33%)ZS = MIN...MAXSound power level, motor45 dB(A)Position indication Mechanical, integrated, two-sectionSR24A-MP-RSafety dataProtection class IEC/EN III, Safety Extra-Low Voltage (SELV)Power source ULClass 2 Supply Degree of protection IEC/EN IP54Degree of protection NEMA/UL NEMA 2Enclosure UL Enclosure Type 2EMCCE according to 2014/30/EUCertification IEC/EN IEC/EN 60730-1 and IEC/EN 60730-2-14UL ApprovalcULus according to UL60730-1A, UL60730-2-14 and CAN/CSA E60730-1The UL marking on the actuator depends on the production site, the device is UL-compliant in any case Type of actionType 1Rated impulse voltage supply / control 0.8 kV Pollution degree 3Ambient humidity Max. 95% RH, non-condensing Ambient temperature 0...50°C [32...122°F]Storage temperature -40...80°C [-40...176°F]Servicingmaintenance-free Mechanical dataConnection flange F03/F04/F05WeightWeight 0.97 kgTechnical data••••••••Safety notesThis device has been designed for use in stationary heating, ventilation and air-conditioning systems and must not be used outside the specified field of application, especially in aircraft or in any other airborne means of transport.Outdoor application: only possible in case that no (sea) water, snow, ice, insolation or aggressive gases interfere directly with the device and that it is ensured that the ambient conditions remain within the thresholds according to the data sheet at any time.Only authorised specialists may carry out installation. All applicable legal or institutional installation regulations must be complied with during installation.The switch for changing the direction of rotation may only be operated by authorisedspecialists. The direction of rotation must not in particular be reversed in a frost protection circuit.The surface temperature between actuator and fitting may not exceed 50°C.The device may only be opened at the manufacturer's site. It does not contain any parts that can be replaced or repaired by the user.Cables must not be removed from the device.The device contains electrical and electronic components and must not be disposed of as household refuse. All locally valid regulations and requirements must be observed.SR24A-MP-RProduct featuresOperating mode Conventional operation:The actuator is connected with a standard control signal of 0...10 V and drives to the positiondefined by the control signal. The measuring voltage U serves for the electrical display of theactuator position 0.5...100% and as control signal for other actuators.Operation on Bus:The actuator receives its digital control signal from the higher level controller via the MP-Busand drives to the position defined. Connection U serves as communication interface and doesnot supply an analogue measuring voltage.Converter for sensors Connection option for a sensor (passive or active sensor or switching contact). The MPactuator serves as an analogue/digital converter for the transmission of the sensor signal viaMP-Bus to the higher level system.Application For rotary valves and butterfly valves with the following mechanical specifications:– ISO 5211: F03, F04, F05 (hole circle diameter on the flange for mounting the fitting)– ISO 5211: quadratic, flat head or wedge-shaped spindle head geometryParametrisable actuators The factory settings cover the most common applications. Single parameters can be modifiedwith the Belimo service tools MFT-P or ZTH EU.Tappet shaft The form fit adapter is not included in the scope of delivery (see «Accessories»).Simple direct mounting Simple direct mounting on the rotary valve or butterfly valve with mounting flange. Themounting orientation in relation to the fitting can be selected in 90° steps.Manual override Manual override with push-button possible (the gear train is disengaged for as long as thebutton is pressed or remains locked).Adjustable angle of rotation Adjustable angle of rotation with mechanical end stops.High functional reliability The actuator is overload protected, requires no limit switches and automatically stops whenthe end stop is reached.Position indication The two-section position indication (lever) can be reduced to 70 mm, the front part of thelever can be attached to the cable (clip).Home position The first time the supply voltage is switched on, i.e. at the time of commissioning, the actuatorcarries out an adaptation, which is when the operating range and position feedback adjustthemselves to the mechanical setting range.The actuator then moves into the position defined by the control signal.Factory setting: Y2 (counter-clockwise rotation).SR24A-MP-R Adaptation and synchronisation An adaptation can be triggered manually by pressing the "Adaptation" button or with the PC-Tool. Both mechanical end stops are detected during the adaptation (entire setting range).Automatic synchronisation after pressing the manual override button is configured. Thesynchronisation is in the home position (0%).The actuator then moves into the position defined by the control signal.A range of settings can be adapted using the PC-Tool (see MFT-P documentation) Product featuresAccessoriesGateways Description TypeGateway MP to BACnet MS/TP UK24BACGateway MP to Modbus RTU UK24MOD Electrical accessories Description TypeAuxiliary switch 1x SPDT add-on S1AAuxiliary switch 2x SPDT add-on S2AFeedback potentiometer 140 Ω add-on P140AFeedback potentiometer 1 kΩ add-on P1000AFeedback potentiometer 10 kΩ add-on P10000AMP-Bus power supply for MP actuators ZN230-24MP Mechanical accessories Description TypeForm fit adapter square 8x8x57 mm (LxWxH)ZSV-08Form fit adapter square 9x9x57 mm (LxWxH)ZSV-09Form fit adapter square 10x10x57 mm (LxWxH)ZSV-10Form fit adapter square 11x11x57 mm (LxWxH)ZSV-11Form fit adapter square 11x11x57 mm (LxWxH, inside square)ZSV-11-4KForm fit adapter square 12x12x57 mm (LxWxH)ZSV-12Form fit adapter square 14x14x57 mm (LxWxH)ZSV-14Form fit adapter flat head 8xø17x57 mm (WxøxH)ZSF-08Form fit adapter flat head 9xø12x57 mm (WxøxH)ZSF-09Form fit adapter flat head 10xø17x57 mm (WxøxH)ZSF-10Form fit adapter flat head 11xø14x57 mm (WxøxH)ZSF-11Form fit adapter flat head 14xø18x57 mm (WxøxH)ZSF-14Form fit adapter wedge groove ø12x4x57 mm (øxWxH)ZSK-12Form fit adapter wedge groove ø14x5x57 mm (øxWxH)ZSK-14Tools Description TypeService tool, with ZIP-USB function, for parametrisable and communicative Belimo actuators, VAV controller and HVAC performance devices ZTH EUBelimo PC-Tool, Software for adjustments and diagnostics MFT-P Adapter for Service-Tool ZTH MFT-C Connecting cable 5 m, A: RJ11 6/4 ZTH EU, B: 6-pin for connection toservice socketZK1-GEN Connecting cable 5 m, A: RJ11 6/4 ZTH EU, B: free wire end forconnection to MP/PP terminalZK2-GENWire colours:1 = black2 = red3 = white5 = orangeElectrical installationSupply from isolating transformer.Parallel connection of other actuators possible. Observe the performance data.Direction of rotation switch is covered. Factory setting: Direction of rotation Y2.SR24A-MP-RWiring diagrams MP-BusAC/DC 24 V, modulatingElectrical installationFunctionsFunctions with basic values (conventional mode)Override control with AC 24 V with relay contactsOverride control with AC 24 V with rotary switch Control remotely 0...100% withpositioner SG..Minimum limit with positioner SG..Primary/secondary operation (position-dependent)Functions with basic values (conventional mode)Control with 4...20 mA via external resistorCaution:The operating range must be set to DC 2...10 V.The 500 Ohm resistor converts the 4...20 mA current signal to a voltage signal DC 2...10 V.Functional checkProcedure1. Connect 24 V to connections 1 and 22. Disconnect connection 3:– with direction of rotation L: Actuator rotates to the left – with direction of rotation R: Actuator rotates to the right3. Short-circuit connections 2 and 3:– Actuator runs in opposite directionFunctions with specific parameters (Parametrisation necessary)Connection on the MP-BusMP-Bus Network topologyMax. 8 MP-Bus nodesThere are no restrictions for the network topology (star, ring, tree or mixed forms are permitted).Supply and communication in one and the same 3-wire cable • no shielding or twisting necessary• no terminating resistors required•••••Functions with specific parameters (Parametrisation necessary)Connection of active sensorsConnection of external switching contactSupply AC/DC 24 VOutput signal 0...10 V (max. 0...32 V)Resolution 30 mVSwitching current 16 mA @ 24 VStart point of the operating range must be parametrised on the MP actuator as ≥0.5 VConnection of passive sensors1) Depending on the type 2) Resolution 1 OhmCompensation of the measured value is recommendedOverride control and limiting with AC 24 V with relay contactsControl open/closeSR24A-MP-RFunctions with specific parameters (Parametrisation necessary)Override control and limiting with AC 24 V with rotary switchCaution:The "Close" function is only guaranteed if the start point of the operating range is defined as min. 0.5 V.Control 3-point with AC 24 VPosition control: 90° = 100s Flow control: Vmax = 100sFunctionsSR24A-MP-R Operating controls and indicators1Direction of rotation switchSwitch over:Direction of rotation changes2Push-button and LED display greenOff:No power supply or malfunctionOn:In operationPress button:Triggers angle of rotation adaptation, followed by standard mode3Push-button and LED display yellowOff:Standard modeOn:Adaptation or synchronisation process activeFlickering:MP-Bus communication activeFlashing:Request for addressing from MP clientPress button:Confirmation of the addressing4Manual override buttonPress button:Gear train disengages, motor stops, manual override possibleRelease button:Gear train engages, standard mode5Service plugFor connecting parametrisation and service toolsCheck power supply connection2 Off and3 On Possible wiring error in power supplyServiceTool connection The actuator can be parametrised by ZTH EU via the service socket.For an extended parametrisation the PC tool can be connected.Connection ZTH EU / PC-ToolSR24A-MP-R DimensionsFurther documentation• Overview MP Cooperation Partners• Tool connections• Introduction to MP-Bus Technology• The complete product range for water applications• Data sheets for ball valves• Installation instructions for actuators and/or ball valves• General notes for project planning。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SR-12401系统控制器用户手册第1章概述产品命名规则:SR - 12 4 0 1 XX年份轴数0:脉冲0:PCI XX:客户自定义1:模拟1:以太网1.2 主要特征输出脉冲可以设定为普通脉冲(脉冲加方向)或双脉冲模式,输出逻辑也可以选择。
可实现任意2~4轴线性插补以及任意两轴圆弧插补。
运动中可实时改变速度及目标位置。
提供线性加减速和S曲线加减速功能。
消除速度曲线中的尖角即最大速度校正功能预置运动数据功能。
在执行一个运动过程时,可以将接下来的两个要执行的运动参数写入芯片的缓冲区。
软件限位功能。
间隙补偿功能打滑校正功能。
同时启动和同时停止功能减振功能手轮控制功能操作开关直接控制功能失步检测功能空转脉冲输出功能操作模式有:连续、定长、回原点运动以及线性插补和圆弧插补。
通过相应的设置,还可以使用以下模式:通过指令启动/停止;用手轮脉冲输入实现连续和定长运动;用操作开关信号启动连续运动或定长运动;回原点运动;用指令实现定长运动;通过外部信号实现硬件启动定长运动;通过外部信号触发改变目标位置。
运动中可实时读取逻辑位置、实际位置、驱动速度、加速度、驱动状态。
可接受伺服驱动器的各种信号:如编码器Z相信号、到位信号、报警信号、误差清除信号等。
4轴可同动同停,具有紧急停止输入信号。
支持windows95/98/NT/2000/XP/WIN7、linux等操作系统。
支持C/BC++/VC/VB/C++Builder/Labview等开发工具编程。
1.3 应用环境操作温度:0~60℃储存温度:-20~80℃湿度:5~95% 无凝结1.4 应用领域可以服务于各个行业,从精密到微米级的设备到上千马力的重型设备。
应用包括:机器人食品机械机床印刷机械木工机械包装机械装配线材料处理光学控制橡胶机械自动缠绕设备激光切割1.5 功能描述脉冲输出:4路脉冲输出,可以是脉冲方向或脉冲脉冲模式,最大输出脉冲频率4Mpps。
编码器输入:输入信号模式可以是:90°相差信号(1倍、2倍、4倍)或双脉冲信号(在EA上输入正脉冲或者在EB上输入负脉冲)。
开关量输入/输出:共32通道可编程输入输出。
其中:光耦隔离输入,输入电压:24V集电极开路输出,NPN集电极开路:24V,最大电流:500mA。
控制方式:提供多种控制方式:如定量运动、回零运动、多轴直线插补、二轴圆弧插补等。
位置管理:速度控制:提供了线性加减速和S曲线加减速功能。
因为加速度、减速度可以分别设置,所以可以实现线性加速、S形减速的运动,通过调整加速度和减速度可以在S形加减速曲线中插入线性加减速过程。
运动中可以改变速度及目标位置。
缓存功能:大容量硬件缓存功能,可以确保运动连续,支持64Mflash缓存,用于存储插补指令。
外部信号触发的多轴位置锁存功能。
手轮和外部信号操作功能。
急停输入:提供硬件及软件紧急停止功能。
既可外部输入紧急停止信号,也可软件输入紧急停止指令,立即停止脉冲信号输出。
紧急停止后,必须执行回零操作使指定位置与机械位置相符。
开发库及操作系统:支持windows95/98/NT/2000/XP/WIN7、linux等操作系统。
支持C/BC++/VC/VB/C++Builder/Labview等开发工具编程。
第2章快速使用2.1 装箱清单2.2 外形结构及接线示意图2.3 安装步骤第3章硬件接口定义3.1接口分布图K216控制器的IO接口1、I/O接口2、两个串口、扩展I/O口,以及网口、U盘口、电源、指示灯的分布如图2-1所示。
注意:1、电源直流24V,且注意正负极。
2、如果网络接口连接交换机或者HUB,请用直连网线;如果是跟PC机直连,请用交叉网线。
3、使用各接口前,请详细阅读各接口的定义以及接口电路图。
4、网口、U盘口、拨码开关、扩展IO接口布置在控制器两侧。
3.2 接口定义电源输入口DC24定义:+ 24V+- 24V-ETHERNET 网口COM2 COM1 232接口S1 限为电平设置开关。
扩展IO1 见接口表扩展IO2 见接口表USB-H U盘HOST U盘接口2 D3.5 IO接口3第4章软件编程4.2 指令详解指令1:N功能:程序段号格式:N num说明:num是无符号数,表征具体的程序段数。
在G代码中,表征具体的程序段数。
区分不同的程序段。
在程序中该关键字可省略。
举例:N5;当前G代码程序断号为5。
指令2:G00功能:G00是数控加工技术指令中的快速点位指令。
格式:G00 axis1 pos1 [axis2 pos2] [axis3 pos3]……说明:执行G00指令相应轴将运动到由坐标数据指定的坐标处,G00指令不能用于工件加工。
axis1,axis2,axis3等代表要操作的轴,pos1,pos2,pos3等为对应的坐标数据。
其中的中括号代表该项是可选的,省略号代表可以有更多的可选项,本文档中以后都采用这种表示方式来代表可选指令格式。
坐标轴可以为X,Y,Z;或者为U,V,W,或者为A,B,C,D,E,F,G,H。
其中X,Y,Z分别对应于三维空间xyz坐标系下的x、y、z三个轴,采用绝对坐标模式;U,V,W分别对应xyz坐标下x、y、z三个坐标轴,采用相对坐标模式。
例如X 100 Y200 Z -300代表X轴运动到绝对坐标100处,Y轴运动到绝对坐标200处,Z轴运动到绝对坐标-300处;而U 100 V 200 W -300代表X轴从当前位置向正方向运动100个单位,Y轴向正方向运动200个单位,Z向负方向运动300个单位。
注意这里使用的绝对坐标单位为脉冲,例如绝对坐标2000,代表从坐标0到2000处发2000个脉冲。
A、B、C、D、E、F、G、H可以表示8个轴,A,B,C分别对应于xyz坐标系下的x、y、z三个坐标轴,其它五个轴分别为自定义坐标轴,对应机床上不同用途的各个机械轴。
为了区分相对坐标和绝对坐标,引入俩个关键字PA和PR,PA代表绝对坐标模式,PR代表相对坐标模式。
举例:(1)G00 X100 Y-400;X轴运动到坐标100处,Y轴运动到坐标-400处。
(2)G00 U100 V-400 W200;X轴正向运动100单位,Y轴负向运动400单位,Z正向运动200单位。
(3)G00 PA A100 B200;A轴(对应于X轴)运动到100处,B轴运动到200处。
(4)G00 PR A100 B-200;A轴正向运动100单位,B轴负向运动200单位。
指令3:G01功能:直线插补,可用于工件加工。
格式:G01 axis1 pos1 [axis2 pos2] [axis3 pos3]……说明:执行G01指令相应轴将以直线方式运动到目标位置处。
举例:(1)G01 X100 Y-400;X轴运动到坐标100处,Y轴运动到坐标-400处。
(2)G01 U100 V-400 W200;X轴正向运动100单位,Y轴负向运动400单位,Z正向运动200单位。
(3)G01 PA A100 B200;A轴(对应于X轴)运动到100处,B轴运动到200处。
(4)G01 PR A100 B-200;A轴正向运动100单位,B轴负向运动200单位。
指令4:G02功能:顺时针圆弧插补。
目前系统只能执行xyz坐标系内的XOY、XOZ、YOZ平面内进行圆弧插补。
格式:G02 axis1 pos1 axis2 pos2 cir1 data1 cir2 data2说明:执行G02将在坐标平面内进行顺时针圆弧插补,可以画圆弧或者正圆。
axis1 pos1和axis2 pos2用来指定圆弧插补的终点,当终点与当前点坐标一致时,将画一个正圆,否则画一段圆弧。
cir1 data1和cir2 data2用来指定圆弧插补的圆心位置,采用相对坐标模式,其中cir1和cir2只能从I、J、K三个关键字中选择。
I、J、K分别对应于xyz平面内的x、y、z 三个坐标轴。
举例:(1)G02 U0 V0 I100 J0;从当前点开始顺时针在xoy平面内画一个半径为100的整圆。
(2)G02 X200 Y200 I100 J0;若当前点为(100,100),将画一个以(200,0)为圆心,终点(200,200)的圆弧。
(3)G02 PR A0 V0 I100 J0;同例子(1)。
(4)G02 PA A200 B200 I100 J0;铜例子(2)。
指令5:G03功能:逆时针圆弧插补。
目前系统只能执行xyz坐标系内的XOY、XOZ、YOZ平面内进行圆弧插补。
格式:G03 axis1 pos1 axis2 pos2 cir1 data1 cir2 data2说明:执行G03将在坐标平面内进行顺时针圆弧插补,可以画圆弧或者正圆。
axis1 pos1和axis2 pos2用来指定圆弧插补的终点,当终点与当前点坐标一致时,将画一个正圆,否则画一段圆弧。
cir1 data1和cir2 data2用来指定圆弧插补的圆心位置,采用相对坐标模式,其中cir1和cir2只能从I、J、K三个关键字中选择。
I、J、K分别对应于xyz平面内的x、y、z 三个坐标轴。
举例:(1)G03 U0 V0 I100 J0;从当前点开始逆时针在xoy平面内画一个半径为100的整圆。
(2)G03 X200 Y200 I100 J0;若当前点为(100,100),将画一个以(200,0)为圆心,终点(200,200)的圆弧。
(3)G03 PR A0 V0 I100 J0;同例子(1)。
(4)G03 PA A200 B200 I100 J0;铜例子(2)。
指令6:F功能:设置所有轴的运动速度格式:F vset说明:执行F指令以后,以后的各轴运动速度就改变为vset。
速度为vset,代表每秒发vset 个脉冲。
举例:F 2000;设置运动速度为指令7:HM功能:返回原点。
格式:HM [axis1][axis2][axis3]…….说明:执行HM命令后,由axis1、axis2指定轴将以此执行回零运动。
回零运动采用的是先运动到正极限,然后再返回到零点的方式。
如果HM后面不带轴,则代表所有轴都回零。
举例:(1)HM ;所有轴都回零运动。
(2)HM ABC ;A、B、C三轴回零运动。
指令8:STOP功能:暂停格式:STOP [axis1][axis2]……说明:STOP命令用于停止指定轴的运动。
电机将立即停止运动。
如果STOP不带参数,则所有轴将停止运动。
由STOP暂停的运动可以用START指令重启。
举例:(1)STOP;所有轴运动的暂停。
(2)STOP ABC ;ABC三轴指运动暂停。
指令9:START功能:暂停格式:START [axis1][axis2]……说明:STOP命令用于启动指定轴的运动,即这些轴是允许运动的。