理论力学第三章 4-5
胡汉才编著《理论力学》课后习题答案第3章习题解答

3-3在图示刚架中,已知kN/m3=mq,26=F kN,mkN10⋅=M,不计刚架自重。
求固定端A处的约束力。
mkN12kN60⋅===AAyAxMFF,,3-4杆AB及其两端滚子的整体重心在G点,滚子搁置在倾斜的光滑刚性平面上,如图所示。
对于给定的θ角,试求平衡时的β角。
Aθ3lGβGθBBFARF32lO解:解法一:AB为三力汇交平衡,如图所示ΔAOG中βsinlAO=,θ-︒=∠90AOG,β-︒=∠90OAG,βθ+=∠AGO由正弦定理:)90sin(3)sin(sinθβθβ-︒=+ll,)cos31)sin(sinθβθβ=+l即βθβθθβsincoscossincossin3+=即θβtantan2=)tan21arctan(θβ=解法二::=∑x F,0sinR=-θGF A(1)=∑y F,0cosR=-θGF B(2))(=∑FAM,0sin)sin(3R=++-ββθlFlG B(3)解(1)、(2)、(3)联立,得)tan21arctan(θβ=3-5 由AC 和CD 构成的组合梁通过铰链C 连接。
支承和受力如图所示。
已知均布载荷强度kN/m 10=q ,力偶矩m kN 40⋅=M ,不计梁重。
kN 15kN 5kN 40kN 15===-=D C B A F F F F ;;;解:取CD 段为研究对象,受力如图所示。
0)(=∑F CM,024=--q M F D ;kN 15=D F取图整体为研究对象,受力如图所示。
0)(=∑F AM ,01682=--+q M F F D B;kN 40=B F0=∑yF ,04=+-+D BAyF q F F ;kN 15-=Ay F0=∑x F ,0=AxF3-6如图所示,组合梁由AC 和DC 两段铰接构成,起重机放在梁上。
已知起重机重P1 = 50kN ,重心在铅直线EC 上,起重载荷P2 = 10kN 。
如不计梁重,求支座A 、B 和D 三处的约束反力。
理论力学第三章

M
F'
F
二、空间力偶等效定理
空间力偶的等效条件是:作用在同一刚体上的两个力偶, 如果力偶矩矢相等,则两力偶等效。
理论力学 中南大学土木工程学院 24
理论力学
中南大学土木工程学院
25
理论力学
中南大学土木工程学院
26
三、空间力偶系的合成与平衡
1、合成
力偶作用面不在同一平面内的力偶系称为空间力偶系。 空间力偶系合成的最后结果为一个合力偶,合力偶 矩矢等于各分力偶矩矢的矢量和。即:
8
[例]图示起重机吊起重物。起重杆的A端用球铰链固定在地面上,B端用 绳CB和DB拉住,两绳分别系在墙上的C点和D点,连线CD平行于x轴。 已知CE=EB=DE,角a =30o ,CDB平面与水平面间的夹角∠EBF= 30o, 重物G=10kN。如不计起重杆的重量,求起重杆所受的力和绳子的拉力。 解:1、取杆AB与重物为研究 对象,受力分析如图。
空间力系向点O简化得到一空间汇交力系和一空间 力偶系,如图。
z O
F1 y F2 z M2 z F'1 Mn F'2 y
Fn x
=
M1 x
O F'n
=
MO
F'R
O y
x
( i 1,, 2 ,n )
Fi Fi M i M O ( Fi ) ri Fi
M M cos( M,k ) z M
27
理论力学
中南大学土木工程学院
[例]工件如图所示,它的四个面上同时钻五个孔,每个孔所受的切削力偶 矩均为80N· m。求工件所受合力偶的矩在x,y,z轴上的投影Mx,My,Mz, 并求合力偶矩矢的大小和方向。
第三章理论力学

因此,其平衡的解析条件为:
F
x
0
x
F
y
0
y
F
z
0
z
M
0
M
0
M
0
------ 平衡方程
共六个方程,可以求解空间任意力系中的六个未知约束力. 3、空间任意力系的两种特殊情况: 1)空间平行力系的平衡方程
Fy F cos
,
方向:+、-号;
Fz F cos
2)间接投影法(二次投影法) 如果只已知与一根轴的夹 角 ,则通常的做法是:先将 该力向z 轴及其垂面分解(与 垂面的夹角为 90 ),而位于 垂面内的分力,其平面几何关
系比空间几何关系要容易寻找得多,因此只要在该垂面内
找出其与该平面内的两根轴之一的夹角(与另一根轴的夹
第三章
空间力系
注意:本章不作为重点,主要介绍一些基本概念、基本原理 和一些基本方法的应用,但不作为重点练习;个别需 要掌握的内容设有标注,望大家掌握.
一、空间力系:当力系中各分力的作用线分布于 三维空间时,该力系称为空间力 系. 二、空间力系又可根据力系中各分力的作用线的 分布情况划分为:空间汇交力系、空间力偶 系、空间平行力系和空间 任意力系. 三、本章研究的主要问题:力系的简化、合成及 平衡问题.
M x ( F ) M x ( Fx ) M x ( Fy ) M x ( Fz ) Fz y Fy z M y ( F ) M y ( Fx ) M y ( Fy ) M y ( Fz ) Fx z Fz x M z (F ) M z (Fx ) M z (Fy ) M z (Fz ) Fy x Fx y
理论力学周衍柏第三章

(e) dT Fi dri
(e) 若 Fi dri dV 则 T V E
为辅助方程,可代替上述6个方程中任何一个
§3.5 转动惯量
一、刚体的动量矩 1. 某时刻刚体绕瞬轴OO’转动,则pi点的速度为
vi rii
动量矩为 2. 坐标表示
R Fi Fi 0 M M i ri Fi 0
2. 几种特例 1)汇交力系(力的作用线汇交于一点):取汇交点为 简化中心,则
Fix 0 R Fi 0 Fiy 0 Fiz 0
三、力偶力偶矩 1. 力偶:等大、反向、不共线的两个力组成的利系。
力 偶 所在平面角力偶面. 2. 力偶矩: 对任意一点O M rA F rB F (rA rB ) F r F M Fd
方向 : 右手法则 上式表明:
J z x mi zi xi y mi zi yi z mi ( xi2 yi2 )
I yy mi ( zi2 源自xi2 ) I zy mi zi yi I yz mi yi zi I xz mi xi zi
I zz mi ( xi2 yi2 )
理论力学第3章
理论力学
中南大学土木建筑学院
7
mz (P )mz (P x )mz (P y )mz (P z )6Px (5Py )0 6Pcos45sin605Pcos45cos6038.2(Nm)
mx (P )mx (P x )mx (P y )mx (P z )006Pz 6Psin4584.8(Nm)
由 mA (Fi ) 0
P2a N B
3a0,
N B
2P 3
X 0
XA 0
Y 0
YB NB P0,
YA
P 3
理论力学
中南大学土木建筑学院
22
二、平面平行力系平衡方程 平面平行力系的平衡方程为:
Y 0
mO (Fi )0
一矩式
实质上是各力在x 轴上的投影恒 等于零,即 X 0 恒成立, 所以只有两个独立方程,只能 求解两个独立的未知数。
一、空间任意力系的平衡充要条件是:
R '0F 0 M O mO (Fi )0
又 R' (X )2 (Y )2 (Z )2
MO (mx (F ))2 (my (F ))2 (mz (F ))2
所以空间任意力系的平衡方程为:
X 0,mx (F )0 Y 0,my (F )0 Z 0,mz (F )0
再研究轮
mO (F )0
SAcosRM 0 X 0
X O SAsin 0
Y 0
S Acos YO 0
M PR XO P tg YO P
[负号表示力的方向与图中所设方向相反]
理论力学
中南大学土木建筑学院
理论力学习题答案第三章
第三章思考题解答3.1 答:确定一质点在空间中得位置需要3个独立变量,只要确定了不共线三点的位置刚体的位置也就确定了,故须九个独立变量,但刚体不变形,此三点中人二点的连线长度不变,即有三个约束方程,所以确定刚体的一般运动不需3n 个独立变量,有6个独立变量就够了.若刚体作定点转动,只要定出任一点相对定点的运动刚体的运动就确定了,只需3个独立变量;确定作平面平行运动刚体的代表平面在空间中的方位需一个独立变量,确定任一点在平面上的位置需二个独立变量,共需三个独立变量;知道了定轴转动刚体绕转动轴的转角,刚体的位置也就定了,只需一个独立变量;刚体的平动可用一个点的运动代表其运动,故需三个独立变量。
3.2 答物体上各质点所受重力的合力作用点即为物体的重心。
当物体的大小远小于地球的线度时物体上各质点所在点的重力加速度都相等,且方向彼此平行即重力场为均匀场,此时质心与重心重合。
事实上但物体的线度很大时各质点所在处g 的大小是严格相等,且各质点的重力都指向地心,不是彼此平行的,重心与质心不和。
3.3答 当物体为均质时,几何中心与质心重合;当物体的大小远小于地球的线度时,质心与重心重合;当物体为均质且大小远小于地球的线度时,三者都重合。
3.4 答 主矢F 是力系各力的矢量和,他完全取决于力系中各力的大小和方向,故主矢不随简化中心的位置而改变,故而也称之为力系的主矢;简化中心的位置不同,各力对简化中心的位矢i r 也就不同则各力对简化中心的力矩也就不同,故主矩随简化中心的位置而变,被称之为力系对简化中心的主矩。
分别取O 和O '为简化中心,第i 个力i F 对O 和O '的位矢分别为i r 和i r ',则i r =i r '+O O ',故()()iii ii i O F O O r F r M ⨯'-'=⨯'=∑∑'()∑∑⨯'-⨯'=ii ii i F O O F r ∑⨯'+=ii o F O O M即o o M M ≠'主矢不变,表明刚体的平动效应不变,主矩随简化中心的位置改变,表明力系的作用对刚体上不同点有不同的转动效应,但不改变整个刚体的转动规律或者说不影响刚体绕质心的转动。
理论力学---第三章 空间力系

B
P
Fz 0 : F cos P 0
E
C
D FD
F
C
z
A y
F
x
P
12
B
3.2 力对点的矩和力对轴的矩
3.2.1 力对点的矩以矢量表示-力矩矢 空间力对点的矩的作用效果取决于: MO(F)
z B F
(1)力矩的大小 (2)转向 (3)力矩作用面方位。
h 这三个因素可用一个矢量 M O (F ) 表示。 x 矢量的方位:与作用平面法线 大小: M O (F ) Fh
例1 重为P的物体用杆AB和位于同一水平面的绳索AC与AD支承,如图。
= 45° 已知:P=1000N,CD=AC=AD,E为CD中点,
不计杆重;求绳索的拉力和杆所受的力。 解:以铰A为研究对象,受力如图。
E
C
D
A
Fx 0 : FC sin FD sin 0
Fy 0: FC cos FD cos F sin 0
齿轮的啮合角(螺旋角) β 和压力角 ,试求力 Fn 沿 x,y 和 z 轴的分力。
6
解: 将力Fn向 z 轴和Oxy 平面投影
Fz Fn sin ,
将力Fxy向x,y 轴投影
Fxy Fn cos
Fx Fxy sin Fn cos sin Fy Fxy cos Fn cos cos
z Fz F B Fy
M z (F ) M O (Fxy ) M O (Fx ) M O ( Fy )
xFy yFx
cly理论力学-第三章
理论力学
1 1 M q .gh.1h. h 2 3
(1) 侧墙不绕A点倾倒时Mw kq MqMA0
b 1 1 M w kq M q 1bh. . 1.4 . gh.1h. h 0 2 2 3
解得:b=0.9,根据条件知 b 0.9
力使物体绕某一轴转动效应的量度,称为力对该轴之矩。
Mz(F)= MO(Fxy)=±Fxyd=2S△OA′ B′
是代数量,正负规定 单位为 N· m + –
z
性质:
(1) 当力的作用线与轴平行或相交 时,力对于该轴之矩为零。 (2) 当力沿其作用线平移时, 它对于轴之矩不变。
F A O
d
B
B′
xy
A′ Fxy
1、直接投影法(一次投影法)
x
方向余弦
Fx=Fcosα, Fy=Fcosβ, Fz=Fcosγ
2、 二次投影法(间接投影法)
Fx=Fcosθcos , Fy=Fcosθsin , Fz=Fsinθ
C LY
系 列 一
理论力学 说明: (1) 力在坐标轴上的投影是代数量;而力沿直角坐标轴的分量及 力在坐标平面上的投影是矢量。 (2) 已知力在坐标轴上的投影,则大小及方向余弦为:
(3) 合力对于任一轴之矩等于各分力对于同一轴之矩的代 数和,此即力对轴之矩的合力矩定理。
C LY
系 列 一
理论力学 三、力对点之矩与力对通过该点的轴之矩的关系 1、力矩关系定理
力F对O点的矩矢大小为:
z MO(F)
γ
|MO(F)|=2S△OAB (a)
力F对于通过O点的z轴的矩矢大小为:
B
A F
理论力学第三章力矩与平面力偶理论(H)

理论⼒学第三章⼒矩与平⾯⼒偶理论(H)第3章⼒矩与平⾯⼒偶理论※平⾯⼒对点之矩的概念及计算※⼒偶及其性质※平⾯⼒偶系的合成与平衡※结论与讨论§3-1 平⾯⼒对点之矩的概念及计算1.⼒对点之矩AFBhhF M O ?±=)(F h ——⼒臂O ——矩⼼OABM O Δ±=2)(F M O (F ) ——代数量(标量)“+”——使物体逆时针转时⼒矩为正;“-”——使物体顺时针转时⼒矩为负。
2. 合⼒之矩定理平⾯汇交⼒系合⼒对于平⾯内⼀点之矩等于所有各分⼒对于该点之矩的代数和。
3. ⼒矩与合⼒矩的解析表达式xA FF xF yOαyx yx y y O x O O yF xF M M M ?=+=)()()(F F F )()()()()(21i O n O O O R O M M M M M F F F F F ∑=+++=")()(ix i iy i R O F y F x M ?∑=FF nαOrF rF 已知:F n ,α,r求:⼒F n 块对轮⼼O 的⼒矩。
h解:(1)直接计算αcos )(r F h F M n n n O ==F (2)利⽤合⼒之矩定理计算αcos )()()()(r F M M M M n O O r O n O ==+=F F F F 例题1§3-2 ⼒偶及其性质1.⼒偶与⼒偶矩⼒偶——两个⼤⼩相等、⽅向相反且不共线的平⾏⼒组成的⼒系。
⼒偶臂——⼒偶的两⼒之间的垂直⼒偶的作⽤⾯——⼒偶所在的平⾯。
(1)⼒偶不能合成为⼀个⼒,也不能⽤⼀个⼒来平衡。
⼒和⼒偶是静⼒学的两个基本要素。
(2)⼒偶矩是度量⼒偶对刚体的转动效果;它有两个要素:⼒偶矩的⼤⼩和⼒偶矩的转向。
F′FABOdx FdFxxdFMMMOOO=+′=′+=′)()()(),(FFFF⼒偶矩±=FdM2.平⾯⼒偶的等效定理1F ′F ′2F ′0F ′F 00F ′F 0ABDCdF F 1F 2★在同平⾯内的两个⼒偶,如果⼒偶矩相等,则两⼒偶彼此等效。
理论力学第三章冯维明主编

返回首页
3.2 点的速度合成定理 由合成定理有
例 题
式中三个矢量具有六个要素,已知四个,可作速度平行四边 形,如图所示,则求得
vA va ve cot v cot 30 3v
v θ v θ
v
其方向铅直向上。
v
Theoretical Mechanics
返回首页
3.2 点的速度合成定理
v
由正弦定理
ve vr sin sin 60
v
与 v r 间的夹角为 va
v
Theoretical Mechanics
2
返回首页
第三章 点的合成运动
§3.3 牵连运动为平动时 点的加速度合成定理
Theoretical Mechanics
返回首页
3.3 牵连运动为平动时点的加速度合成定理
Theoretical Mechanics
返回首页
3.2 点的速度合成定理
3.2.1 绝对速度、相对速度和牵连速度
牵连点:在任意瞬时,与动点相重合的动坐标 系上的点。
讨 论
动坐标系是一个包含与之固连的刚体在内的运动 空间,除动坐标系作平移外,动坐标系上各点的运 动状态是不相同的。在任意瞬时,只有牵连点的运 动能够给动点以直接的影响。为此,定义某瞬时, 与动点相重合的动坐标系上的点(牵连点)相对于 静坐标系运动的速度称为动点的牵连速度 。
返回首页
3.2 点的速度合成定理
3.2.1 绝对速度、相对速度和牵连速度 3.2.2 速度合成定理
Theoretical Mechanics
返回首页
3.2 点的速度合成定理
3.2.1 绝对速度、相对速度和牵连速度
理论力学简明教程第三章非惯性参考系课后答案
第三章 非惯性参考系不识庐山真面目,只缘身在此山中。
地球的多姿多彩,宇宙的繁荣,也许在这里可以略见一斑。
春光无限,请君且放千里目,别忘了矢量语言在此将大放益彩。
【要点分析与总结】1 相对运动t r r r '=+t t dr dr dr dr dr r dt dt dt dt dtυω'''==+=++⨯ t r υυω''=++⨯()t dv dv d v r a dt dt dtω''+⨯==+222**22()t d r d r d dr r v r dt dt dt dtωωωω'''''=++⨯+⨯+⨯+⨯()2t a a r r v ωωωω''''=++⨯+⨯⨯+⨯t c a a a '=++〈析〉仅此三式便可以使“第心说”与“日心说”归于一家。
(1) 平动非惯性系 (0ω=)t a a a '=+ 即:()t ma F ma '=+-(2) 旋转非惯性系 (0t t a υ==)()2a a r r ωωωωυ''''=+⨯+⨯⨯+⨯2 地球自转的效应(以地心为参考点)2mr F mg m r ω=--⨯写成分量形式为:2sin 2(sin cos )2cos x y z mx F m y my F m x z mz F mg m y ωλωλλωλ⎧=+⎪=-+⎨⎪=-+⎩ 〈析〉坐标系选取物质在地面上一定点O 为坐标原点,x 轴指向南方,y 轴指向东方,铅直方向为 z 轴方向。
2mr F mg m r ω=--⨯ 为旋转非惯性系 ()2F mg mr m r m r m r ωωωω-=+⨯+⨯⨯+⨯在 ,rR ωω条件下忽略 m r ω⨯与 ()m r ωω⨯⨯所得。
正因如此,地球上的物体运动均受着地球自转而带来的科氏力 2m r ω-⨯的作用,也正是它导致了气旋,反气旋,热带风暴,信风,河岸右侧冲刷严重,自由落体,傅科摆等多姿多彩的自然现象。
理论力学第三章碰撞

冲量矩定理
n
n
ri mi vi ri mi vi
i 1
i 1
n
i 1
t2 t1
ri
d
I
e i
n
LO2 LO1
M
O
(
I
e i
)
MO (I e)
i 1
在一定的时间间隔内,质点系动量矩的改变等于
同一时间间隔内,作用在质点系上所有外力冲量矩
的主矩。
§3-2 用于碰撞过程的基本定理
铁锤打击人体
锤重4.45N;
碰撞前锤的速度 457.2 mm/s;
塑料
碰撞的时间间隔 0.01s;
撞击力峰值 244.8 N,
静载作用的55倍。
2.碰撞现象的特点
撞击过程中能量的急剧转换-撞击过程中, 各种机械能之间、机械能与其他形式能量之间 以极快的速度转换。
m
势能
动能 m
弹性应变能
2.碰撞现象的特点
e= vAn vA cos vAn vA cos
水平方向动量守恒 mvA sin =mvA sin
B
e= tan
tan
§3-4 碰撞问题举例
例题1
锻造用的汽锤锤重与打桩机锤头重量均为 mAg; 汽锤的铁 砧与桩的重量均为 mBg。汽锤和打桩机的锤头打击前速度 均为 vA
试分析:汽锤与打桩机在打击过程中的动量传递与能量转换。
T1 m
A
mB
§3-4 碰撞问题举例
例题1
解:汽锤和打桩机锤头打击前后的动能变化
T= mAmB
2 mA mB
v
A
2= 1
T1 m
A
理论力学第三章 任意力系的简化与平衡条件

例3-2 已知:涡轮发动机叶片轴向力F=2kN,力偶矩
M=1kN.M, 斜齿的压力角=20 ,螺旋角 。 =10 ,齿轮节圆半径 r=10cm。不计发动 机自重。 O1O2=L1=50cm, O2A=L2=10cm. 求: FN, O1,O2处的约束力。
。
第三章 力系的简化与平衡条件
§3-5 力系的平衡条件
3
F2 F3
1
F'
F1
1 O 200 1
x
2
1 3 1 FRy F1 F2 F3 = -161.6(N) 2 10 5
第三章 任意力系的简化与平衡条件
§3-4 力系简化计算
解:(1)先将力系向O点简化,求主矢和主矩。 FRx FRy =466.5(N) 2 2 FR
Xi 0 F x F2x Fr 0 1
F y F2y F 0 1
Zi 0
F z Fa F 0 1
第三章 力系的简化与平衡条件
§3-5 力系的平衡条件
例3-2 解: 3、列平衡方程
Mx (F) 0
F2 y L1 F (L1 L2 ) 0
y
100 1
F
80
3
Байду номын сангаас
F2 F3
1
F'
F1
1 O 200 1
x
2
第三章 任意力系的简化与平衡条件
§3-4 力系简化计算
例3-1 (1)先将力系向O点简 解: 化,求主矢和主矩。 1 1 F2 FRx F1 10 2 2 F3 5 = -437 .6(N)
y
100 1
F
理论力学 第3章
• 作业: • 习题 3-6,3-12
§ 3-5 空间任意力系的平衡方程
1. 空间任意力系的平衡方程 空间任意力系平衡的必要和充分条件:
该力系的主矢r 和对于r 任一点的主矩都为零 FR 0, MO 0
Fx 0 Fy 0 Fz 0
Mx 0 My 0 Mz 0
所有各力在三个坐标轴中每一个轴上的投影的 代数和等于零,以及这些力对于每一个坐标轴的 矩的代数和也等于零。
解析法表示:
M M xi M y j M zk
Mx 0 My 0 Mz 0
——空间力偶系的平衡方程
例3-5 已知:在工件四个面上同时钻5个孔,每个 孔所受切削力偶矩均为80N·m.
求:工件所受合力偶矩在 x, y轴, z上的投影.
解:
把力偶用力偶矩 矢表示,平行移到 点A .
Mx Mix M3 M4 cos45 M5 cos45 193.1N m
力螺旋 由一力和一力偶组成的力系,其中
的力垂直于力偶的作用面
(1)FR 0, M O 0, FR // M O
中心轴过简化中心的力螺旋
钻头钻孔时施加的力螺旋
r r rr (2)FR 0, MO 0,既FR不, M平O行也不垂直,成任意夹
角
力螺旋中心轴距简化中心为 d M O sin
FR
F1 F2 3.54kN FA 8.66kN
§ 3-2 力对点的矩和力对轴的矩
1. 力对点的矩以矢量表示——力矩矢
力对点之矩 在平面力系中——代数量 在空间力系中——矢量
MO (F) Fh 2ΔOAB
r MO
r (F
)
rr
r F
三要素:
(1)大小:力 F与力臂的乘积
理论力学 陈立群 第3章 平衡问题 解答
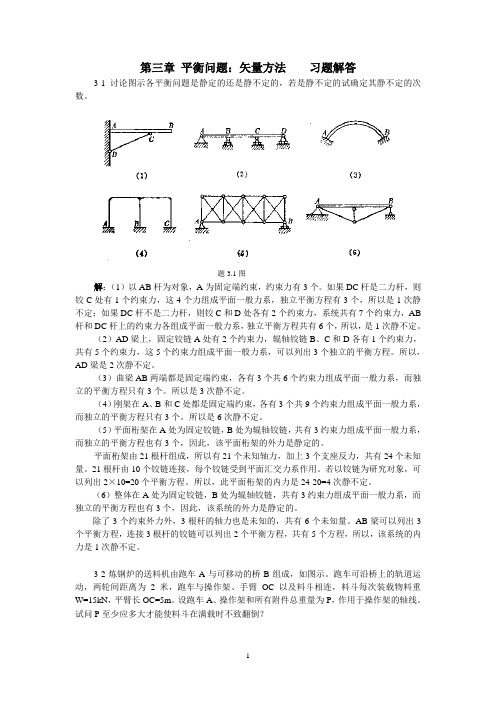
第三章平衡问题:矢量方法习题解答3-1讨论图示各平衡问题是静定的还是静不定的,若是静不定的试确定其静不定的次数。
题3.1图解:(1)以AB杆为对象,A为固定端约束,约束力有3个。
如果DC杆是二力杆,则铰C处有1个约束力,这4个力组成平面一般力系,独立平衡方程有3个,所以是1次静不定;如果DC杆不是二力杆,则铰C和D处各有2个约束力,系统共有7个约束力,AB 杆和DC杆上的约束力各组成平面一般力系,独立平衡方程共有6个,所以,是1次静不定。
(2)AD梁上,固定铰链A处有2个约束力,辊轴铰链B、C和D各有1个约束力,共有5个约束力,这5个约束力组成平面一般力系,可以列出3个独立的平衡方程。
所以,AD梁是2次静不定。
(3)曲梁AB两端都是固定端约束,各有3个共6个约束力组成平面一般力系,而独立的平衡方程只有3个。
所以是3次静不定。
(4)刚架在A、B和C处都是固定端约束,各有3个共9个约束力组成平面一般力系,而独立的平衡方程只有3个。
所以是6次静不定。
(5)平面桁架在A处为固定铰链,B处为辊轴铰链,共有3约束力组成平面一般力系,而独立的平衡方程也有3个,因此,该平面桁架的外力是静定的。
平面桁架由21根杆组成,所以有21个未知轴力,加上3个支座反力,共有24个未知量。
21根杆由10个铰链连接,每个铰链受到平面汇交力系作用。
若以铰链为研究对象,可以列出2×10=20个平衡方程。
所以,此平面桁架的内力是24-20=4次静不定。
(6)整体在A处为固定铰链,B处为辊轴铰链,共有3约束力组成平面一般力系,而独立的平衡方程也有3个,因此,该系统的外力是静定的。
除了3个约束外力外,3根杆的轴力也是未知的,共有6个未知量。
AB梁可以列出3个平衡方程,连接3根杆的铰链可以列出2个平衡方程,共有5个方程,所以,该系统的内力是1次静不定。
3-2炼钢炉的送料机由跑车A与可移动的桥B组成,如图示。
跑车可沿桥上的轨道运动,两轮间距离为2米,跑车与操作架、手臂OC以及料斗相连,料斗每次装载物料重W=15kN,平臂长OC=5m。
理论力学第三章平面一般力系

再研究轮
mO(F)0
SAco R sM 0
X0
XOSAs in0
Y0 SAco sYO0
MPRXOPtg YO P
[负号表示力的方向与图中所设方向相反]
23
由物系的多样化,引出仅由杆件组成的系统——桁架
§3-7 平面简单桁架的内力分析
24
工程中的桁架结构
25
工程中的桁架结构
26
工程中的桁架结构
18
[例]
静定(未知数三个)
静不定(未知数四个)
静不定问题在强度力学(材力,结力,弹力)中用位移 谐调条件来求解。
19
二、物体系统的平衡问题 物体系统(物系):由若干个物体通过约束所组成的系统叫∼。 [例]
外力:外界物体作用于系统上的力叫外力。 内力:系统内部各物体之间的相互作用力叫内力。
20
物系平衡的特点: ①物系静止 ②物系中每个单体也是平衡的。每个单体可列3个 平衡方程,整个系统可列3n个方程(设物系中 有n个物体)
平面力偶系的平衡方程
X 0
Y 0
mi 0
四、静定与静不定
独立方程数 ≧未知力数目—为静定
独立方程数 < 未知力数目—为静不定 五、物系平衡
物系平衡时,物系中每个构件都平衡, 解物系问题的方法常是:由整体 局部
单体
39
六、解题步骤与技巧
解题步骤
解题技巧
①选研究对象
① 选坐标轴最好是未知力 投影轴;
解: 研究整体 画受力图 选坐标列方程
m B 0 , Y A 2 .5 P 1 .2 0
Y0 YAR Bq a P 0
R B q 2 m a a 2 P 2 2 0 0 .8 0 1 .8 2 6 2 1 0 ( k 2 )N Y A P q R B a 2 2 0 0 . 0 8 1 2 2 ( k 4 )N 17
第三章物体受力分析及受力图(PDF)

第三章物体的受力分析及受力图§ 3.1 载荷荷载分类:(1)按作用时间的久暂恒载(dead load):固定载荷,长期作用于结构上的不变荷载,其大小、方向、作用位置是不变的。
例如结构的自重、安装在结构上的设备重量等;活载(live load):建筑物在施工和使用期间可能存在的可变荷载。
例如吊车荷载、结构上的人群、风、雪等荷载。
(2)按荷载的作用范围集中荷载(concentrated load):荷载的作用面积相对于总面积是微小的。
分布荷载(distributed load):分布作用在一定面积或长度上的荷载,如风、雪、自重等荷载。
(3)按荷载作用的性质静荷载(static load):大小、方向和位置不随时间变化或变化极其缓慢,不使结构产生显著的加速度。
例如结构自重、楼面活载等;动荷载(dynamic load):随时间迅速变化或在短暂时间内突然作用或消失的荷载,使结构产生显著的加速度。
注意:车辆荷载、风荷载和地震荷载通常在设计中简化为静力荷载,但在特殊情况下要按动力荷载考虑。
(4)按荷载位置的变化固定荷载(fixed load ):作用位置固定不变的荷载,例如风、雪、结构自重等。
移动荷载(travelling load):可以在结构上自由移动的荷载,例如吊车梁上的吊车荷载、公路桥梁上的汽车荷载就是移动荷载。
常见分布载荷合力作用位置§3.2 工程常见约束与约束力自由物体——空间运动不受任何限制的物体,如飞机、导弹、航天器受约束物体——空间运动受到限制的物体,如汽轮机、车轮。
工程中大部分研究对象都是非自由体,约束(constraint )—— 物体运动过程中所受到的限制。
约束的作用一方面限制物体运动,另一方面表现为约束力。
约束力(reactions)——约束对物体的反作用力,又称约束反力。
是一种被动力,其大小不能预先确定,方向总是与约束力所能阻止的运动方向相反。
主动力-----主动地施加于物体,改变其运动状态的力称为主动力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 ,
讨论滑动: 临界时 Ff =Fmax= fsFN FP1=Ff = fs FN = fs W = 0.2 × 10 =2 kN 讨论滚动: 临界时 M =M r r,max= δ FN
M r dFN dW FP 2 0.1 kN R R R
比较可知先滚动。
讨论
轮子只滚动而不滑动的条件
对多数材料,通常情况下
fd fs
3.4.3 摩擦角与自锁现象
全反力
摩擦角
最大全反力FR对法向反力FN的偏角f 。
FR F
FN
FRm Fmax
f
FN
全反力 FR=FN+F
最大全反力: FRm=FN+Fmax
F tan FN
Fmax tan f FN
摩擦角 最大全反力FRm对法向反力FN的偏角f 。 FRm Fmax 最大全反力 FRm=FN+Fmax
轮子与地面的滚阻系数δ= 0.005m,摩擦因数 fs=0.2, 问轮子 是先滚还是先滑?
解: 通过比较达到临界滑动和临界滚动所需的水平力来判断。 1.取轮子为研究对象。 2.受力分析如图。
3.列平衡方程。
M
F 0 , F 0 ,
x
y
A
FP Ff 0
FN W 0
M r,max FP R 0
P
[例6] 构件1及2用楔块3联结,已知楔块与构件间的摩擦系数f=0.1,
求能自锁的倾斜角 。 解:研究楔块,受力如图
由 X 0,Rcos( ) R1cos 0
由二力平衡条件 :R R1
, 2 又tg 0.1 f , tg1 0.150 43' 2 110 26' (极限状态) 即当 2 110 26'时能自锁
M r,max dFH
d FH G 1 504 kN
例5:一制动器,制动轮半径R=50cm,鼓轮半径 r=30cm,制动轮与制动块间的静摩擦系数 f1 =0.4, 动摩擦系数 f K =0.3,被提升的重物的重量 G=1000N,手柄长L=300cm,a=60cm, b=10cm,B处 作用铅直力P=200N,求此时铰链A处的约束反力。
1. 轮不滑动,处于向左滚动的临界状态。 列平衡方程
F
M
F
x
0,
FP F 0
y
O
0,
FN W 0
M r=Mr,max= δFN
0, rFP M r,max FR 0
临界时
解得
FN W 300 N
Mr,max=δFN=1.5 N﹒m
FP
M r,max Rr
Q与F形成主动力偶使前滚
22
此力系向 A点简化
d
'
滚阻力偶与主动力偶(Q,F)相平衡 ①滚阻力偶M随主动力偶(Q , F)的增大而增大; ② 0 M M max 有个平衡范围; 滚动 摩擦 ③ M max 与滚子半径无关; ④滚动摩擦定律: M max d N ,d 为滚动摩擦系数。
33
例7 匀质轮子的重量 W=300 N,由半径 R= 0.4 m和半
径 r = 0.1 m两个同心圆固连而成。已知轮子与地面的滚阻
系数δ= 0.005 m,摩擦因数 fs =0.2,求拉动轮子所需力FP 的最小值。
解: 轮子可能发生的三种运动趋势:
1.向左滚动趋势。 2.向右滚动趋势。3.滑动趋势 。
分析:
1、取分离体,画受力图
y
T
P
B
2、建立图示坐标系
3、列平衡方程
X 0, Y 0, F T sin 0 N P T cos 0
____
N
A
F
x
____ AB m B 0, P cos N AB cos F AB sin 0 2 补充方程 F fN
23
滚动摩擦系数 d 的说明: ①有长度量纲,单位一般用mm,cm; ②与滚子和支承面的材料的硬度和温度有关。 ③ d 的物理意义见图示。 根据力线平移定理,将N和M合成一个力N' ,
N'=N
d M N'
d
'
M d N ' d N
d d
纯滚动条件
24
例3 匀质轮子的重量 W =10 kN,半径 R= 0.5 m;已知
的斜面匀速向上作纯滚动。已知轮子与斜面的滚阻系数 δ=
0.05 cm,试求力FH的大小。 解: 1.取轮子为研究对象,受力分析如图。
2.列平衡方程。
F 0, M 0 ,
y
A
FN G cos 0
M r ,max G sin r FH r 0
补充方程 3.联立求解。
sin f cos tg f Qmin G G G tg( m ) cos f sin 1 f tg
平衡范围应是
Qmin QQmax
21
3.4.5 滚动摩阻
X 0,Q F 0 Y 0,P N 0 M A 0,Qr 0(不成立)
f
FP
FR
③自锁应用举例
摩擦系数的测定:OA绕O 轴转动使物块刚开始下滑时测出
角,tg =f , (该两种材料间静摩擦系数)
Fmax f N tg m f N N
13
斜面自锁条件
f
螺纹自锁条件
f
3.4.4 考虑滑动摩擦时的平衡问题 仍为平衡问题,平衡方程照用,求解步骤与 前面基本相同。 几个新特点 1 画受力图时,必须考虑摩擦力;
Xo
则对于手柄:
M
A
0 NK a FK b PL 0 N K 1052 .6N F f N
K K K
X 0 Y 0
XA
X A FK 0
X A 315.2 N
YA NK P 0 YA 852.6N
YA
Nk
C
A
m
q
a
D
a
B
a
E
a
G
P
a
解题思路 仅由整体系统的平衡解不出任何约束 力。 CD杆受力最简单,应先由其平衡解 出C绞的约束力。
sin 联立解方程组求得: f cos 2tg sin
[例2] 已知: =30º ,G =100N,f =0.2 求:①物 体静止时,
水平力Q的平衡范围。②当水平力Q = 60N时,物 体能否平衡?
19
解:①先求使物体不致于上滑的 Qmax 图(1)
由 X 0, Qmax cos Gsin Fmax 0 Y 0, N Qmax sin Gcos 0 补充方程: Fmax f N
t g f G t g t g m 解得: Qmax G 1 ft g 1 t g m t g
Gt g( m )
应用三角公式: tg tg m tg ( m ) 1 tg m tg
20
同理: 再求使物体不致下滑的 Qmin 图(2) 解得:
5 N
负值说明轮不可能有向左 滚动的趋势。
FP F
2. 轮不滑动,处于向右滚动的临界状态。
列平衡方程
F
M
F
x
0,
FP F 0
y
O
0,
FN W 0
M r=Mr,max= δFN
0, rFP M r,max FR 0
临界时 解得
FN W 300 N
方向: 与物体相对滑动趋势方向相反 定律: 库伦摩擦定律
Fmax f N
( f 只与材料和表面情况有关, 与接触面积大小无关。)
4
二、动滑动摩擦力:
大小: 动摩擦力特征:
F ' f 'N
(无平衡范围)
方向: 与物体运动方向相反
定律:
F ' f 'N
(f '只与材料和表面情况有关,与接 触面积大小无关。)
2 严格区分物体处于临界、非临界状态;
3 因 0 Fs Fmax ,问题的解有时在一个范围内。
例1:均质杆AB,重为P,A端放于粗糙的水平面上,B 端用无重细绳拉住,且使A、B、C三点在同一铅锤平 面内。今测得杆的A端将要向左滑动的趋势, 、角 已知,求杆与地面间的摩擦系数。
c
B
A
F Fmax ≤ tan f FN FN
F Fmax ≤ FN FN
0≤ ≤ f
所以物体平衡范围0≤F≤Fmax也可以表示为0≤ ≤ f。 性质:当物体静止在支承面时,支承面的全反力的偏角
不大于摩擦角。
四、自锁
①定义:当物体依靠接触面间的相互作用的摩擦 力 与正
压力(即全反力),自己把自己卡 紧,不会松开 (无论外力多大),这种现象称为自锁。
Mr,max=δFN=1.5 N﹒m
FP
M r,max Rr
5 N
此时滑动摩擦力为
FP F
FP F 5 N
3. 轮处于滑动的临界状态。
此时静摩擦力达到最大值
F=Fmax= fs FN = fs W= 60 N 远远大于滚动所需的力FN值。所以 拉动轮子的力最小值 FN = 5 N。 轮子向右滚动。
f
FN
f s FN Fmax fs tan f FN FN
由此可得重要结论:
摩擦角的正切=静摩擦因数
Fmax tan f FN
摩擦锥 以支承面的法线为轴作出的以2f 为顶角的圆锥。