轮机自动化课件(精)
轮机自动化课件 第六章
高级扩展级等于是本地操作面板移到了远程,在本 地面板上选择好“Remote”即可将功能全部移交远程站, 包括各油泵工作模式的选择控制和信息窗内容的显示和 操作。显然,除需要控制电缆线连接外,还需要串行通 讯( RS485通讯 ) 电缆联系。 当然要实现油泵自动遥控,需要电机启动模式选 择开关处于“Remote”控制。如果选用全自动级的远程 操作,则通过现场总线将控制器EPC-50B的总线接口与 远程计算机直接相连,再在计算机内配置相应的通信和 应用软件即可实现远程全功能操作。本地控制EPC-50B 即成为整个分布式控制系统的一个通信节点,向上位机 提供所需要的信息,并接受上位机的控制。此时远程设 备与控制系统的连线就是一根通信线,不再需要控制电 缆了。
•过程输出通道
四、6个数码管显示电路 五、6个发光二极管显示电路 六、报警电路
七、控制系统管理要点
第三节 燃油供油单元的综合控制
燃油供油单元 除了黏度或温度定值控制外,还有 DO/HFO的转换控制,燃油供油泵的运行/备用控制, 燃油滤器的自动控制,回油的脱气自动控制,燃油循环 泵的运行/备用控制及远程控制等功能,全部由控制器 EPC-50B来协调综合控制。 1、DO/HFO的转换控制 (1)柴油控制模式 当控制器接通柴油模式DO时,EPC-50B自动选择 为温度控制模式,燃油温度被监控。加热程序由柴油温 升参数Fa31控制,温升斜坡允许燃油在设定的时间内被 加热到设定的温度。斜坡函数加温期间温度控制指示灯 LED灯“TT”闪烁,当燃油温度在达到温度设置Pr35的 3℃内后,温升斜坡停止。正常温度定值控制运行, “TT”LED灯稳定发亮。
第一节 燃油供油单元自动控制系统 的组成及原理 燃油供油单元自动控制系统总 体上可以分为供油处理系统、燃油 黏度或温度自动控制系统、油泵电 机和滤器自动控制系统等部分。
轮机自动化 课件
《轮机自动化》
传感器与变送器
三、电动差压变送器
1、测量部件
《轮机自动化》
传感器与变送器
三、电动差压变送器
测量部件的特性:
(1)差动电容的相对变化值与压差成线性关系,可以通过转 换电路将这一相对变化值转换为与压差成线性关系的标准电流信 号; (2)差动电容的相对变化值与介电常数无关,这从原理上消 除了填充介质介电常数的变化引起的测量误差; (3)差动电容的相对变化值的大小与膜片至弧形电极的距离 S0有关, S0减小,差动电容的相对变化量越大,即灵敏度越高。
二、气动差压变送器
2)气动转换部分
反馈波纹管的位置---量程 量程越大波纹管越靠?
《轮机自动化》 传感器与变送器
二、气动差压变送器
3)双杠杆差压变送器
《轮机自动化》
传感器与变送器
二、气动差压变送器
2、气动差压变送器零点和量程的调整
《轮机自动化》
传感器与变送器
三、电动差压变送器
作用:将被测物理量转化为4-20mA的标准电 流输出信号。船舶机舱中以电容式电动差压变送器 为主
传感器与变送器
一、变送器的构成原理
2、变送器的零点调整、量程调整和零点迁移
《轮机自动化》
传感器与变送器
二、气动差压变送器
1、气动差压变送器 的结构及工作原理
工作过程:图4-2-5
《轮机自动化》
传感器与变送器
二、气动差压变送器
1)测量部分
过载保护圈
硅油
硬芯
基座
金属膜片
《轮机自动化》
传感器与变送器
第二节 变送器
一、变送器的构成原理
二、气动差压变送器
三、电动差压变送器 四、差压变送器的应用实例
轮机自动化课件

1 、恒定供油量控制模式 2 、恶劣海况控制模式 3 、燃油设定值直接控制模式
五、调速器参数查询与修改 六、调速器模拟试验功能 七、执行机构的试验功能
《轮机自动化》
AUTOCHIEF-IV主机遥控系统
AUTOCHIEF-IV主机遥控系统
第四节
SSU8810安全保护系统
《轮机自动化》
AUTOCHIEF-IV主机遥控系统
第四节 SSU8810安全保护系统
《轮机自动化》
AUTOCHIEF-IV主机遥控系统
AUTOCHIEF-IV主机遥控系统
第三节
DGS8800e数字调速系统
《轮机自动化》
AUTOCHIEF-IV主机遥控系统
第三节 DGS8800E数字调速系统
一、数字调速系统的组成
《轮机自动化》
AUTOCHIEF-IV主机遥控系统
第三节 DGS8800E数字调速系统
一、数字调速系统的工作原理
《轮机自动化》
AUTOCHIEF-IV主机遥控系统
第三节 DGS8800E数字调速系统
二-IV主机遥控系统
第三节 DGS8800E数字调速系统
二、数字调速系统的运行模式:
《轮机自动化》
AUTOCHIEF-IV主机遥控系统
第三节 DGS8800E数字调速系统
轮机自动化课件
一自动控制基础知识一、选择题1 不可作为气动或电动控制系统标准信号的有___B___。
A.0.02~0.1MPa B.0.02~0.1Pa C. 0~10mA D.4~20mA 2 一个环节的输出量变化取决于____A____。
A.输入量的变化 B.反馈量 C.环节特性 D.A+C3 在定值控制系统中为确保其精度,常采用____C____。
A.开环控制系统 B.闭环正反馈控制系统C.闭环负反馈控制系统 D.手动控制系统4 反馈控制系统中,若测量单元发生故障而无信号输出,这时被控量将____D___。
A.保持不变 B.达到最大值 C.达到最小值 D.不能自动控制5 对于自动控制系统,最不利的扰动形式是____A____。
A.阶跃输入 B.速度输入 C.加速度输入 D.脉冲输入6 在反馈控制系统中,调节单元根据____B____的大小和方向,输出一个控制信号。
A.给定位 B.偏差 C.测量值 D.扰动量7 按偏差控制运行参数的控制系统是____B____系统。
A.正反馈 B.负反馈 C.逻辑控制 D.随动控制8 一个控制系统比较理想的动态过程应该是____A____。
A.衰减振荡 B.等幅振荡 C.发散振荡 D.非周期过程9 在反馈控制系统中,为了达到消除静态偏差的目的,必须选用____B____。
A.正反馈 B. 负反馈C.在偏差大时用正反馈 D.在偏差值小时用负反馈10 在反馈控制系统中,执行机构的输入是____B____。
A.被控参数的实际信号 B. 调节器的输出信号C.被控参数的偏差信号 D.被控参数的给定信号11 反馈控制系统中,为使控制对象正常运行而要加以控制的工况参数是____B____。
A.给定值B.被控量C.扰动量D.反馈量12 气动控制系统中,仪表之间的统一标准气压信号是____A____A.0.02~0.1MPa B.0.2~1.0MPa C.0.02~0.14MPa D.0.2~1.4MPa 13 在柴油机冷却水温度控制系统中,其控制对象是____C____。
轮机自动化课件 绪论
二、轮机自动化的作用
五、轮机自动化的发展趋势
1、现场总线技术的应用 2、全面提高控制设备的质量 3、更广泛地应用信息技术
六、参考书目
(1)林叶锦. 轮机自动化。大连:大连 海事大学出版社,2009年9月。 (2)船舶电气与自动化 (轮机自动化)。大连:大连海事 大学出版社,2012年6月。
1、提高船舶动力装置运行的可靠性
2、提高船舶动力装置运行的经济性能 3、改善工作条件,减轻劳动强度
三、轮机自动化的主要内容
(1)参数的自动控制 (2)程序控制 (3)远距离操纵 (4)集中监测与报警 (5)安全保护和自动灭火 (6)船舶电站自动化
四、本课程主要内容 (1)轮机自动化基础知识 (2)参数的自控系统 (3)辅助设备的自动控制 (4)主机遥控系统 (5)监视与报警系统
轮机自动化课件..
1.慢转起动的逻辑条件
1)起动前主机停车时间超过规定的时间; 2)没有应急取消慢转指令; 3)没有达到规定的转数或规定的慢转时间; 4)没有重起动信号; 5)满足起动的逻辑条件
YSLD STD I SC R1 YSH YSO
返回本节
2、慢转起动逻辑回路的功能
慢转起动逻辑回路应该能够检测慢转逻辑条件,
3)转速条件 转速低于换向转速nR或应急换向转速nER
4)顶升机构抬起
Dup=1
返回本节
换向的逻辑条件表达式
YR YRL YRT (n R n ER ) Dup ( I H C H I S C S )YRT (n R n ER ) Dup
2、双凸轮换向的逻辑图
返回本节
1、能耗制动
能耗制动是指,主机在运行中完成应急换向后,在 主机高于发火转速情况下所进行的一种制动。常常 是在应急操纵的情况下进行。其原理是保持主起动 阀处于关闭状态,让空气分配器投入工作,此时由 于换向已经完成,空气分配器是按与主机运转方向 相反的顺序打开个气缸起动阀,当某个气缸的气缸 起动阀打开时正好处在压缩冲程。柴油机相当于一 台压气机,快速消耗柴油机运动部件的惯性能,使 主机转速能以较快的速度下降。
第三节
换向与制动逻辑回路
一、换向逻辑回路 1、换向的逻辑条件 1)换向的鉴别逻辑
YRL I H CS I S CH IH C H IS C S
返回本章
2)停油条件
YRT ( I H C H I S C S ) ( I H RH I S RS ) I H (C H RH ) I S (C S RS )
二、重复起动逻辑回路
1、时序逻辑控制方式 2、时序—转速逻辑控制方式 三、重起动逻辑回路
第1章 轮机自动化基础PPT课件

(1)稳定性:系统受到扰动之后能够恢复到稳定状态的能力。实 际控制系统,至少要求是率减过程或非周期过程,以率减为佳。
评定指标:衰减率 φ,衰减比N
(a)定值控制系统:给定值不变,外部扰动发生阶跃变化; fig.1-15◎
(b)随动控制系统:假定外部扰动不变,给定值阶跃变化。 fig.1-16 ◎
R
(1)阶跃输入: r(t)0 (2)速度输入 :r(t)0Rt
(t 0) (t 0) (t 0) (t 0)
Fig.1-9◎ Fig.1-10◎
(3)加速度输入:r(t)
1 2 0
Rt2
(t 0) (t 0)
(4)脉冲输入:
1
r(t)
h
0
(0t h) (t 0,t h)
Fig.1-11◎ Fig.1-12◎
轮机自动化基础
•自动控制发展概况
• 公元前1400-1100 年,中国、埃及和 巴比伦相继出现自 动计时漏壶,人类 产生了最早期的控 制思想。
• 公元前300年秦昭王时,由李冰父子主持设计修 筑的著名水利工程都江堰,是一种液面控制, 是“系统”观念的杰出体现。
• 公元100年,亚历山大的希罗发明开闭庙 门和分发圣水的自动计时装置。
• 公元132年,中国科学家张衡(公元78~139)发 明水运浑象,研制出自动测量地震的候风地动 仪。
• 公元235年, 中国马钧研 制出用齿轮 传动的自动 指示方向的 指南车(司南 车)
另有发明 击鼓记里
• 公元1637年, 中国明代宋 应星所著 《天工开物》 记载有程序 控制思想的 提花织机结 构图。
若控制单元、测量单元和执行单元合为一体,则称为 基地式控制仪表;若三者分开,则称为组合式控制仪表。
轮机自动化课件PPT课件
(2)无触点的时序控制器
第20页/共45页
3、火焰感受器:
火焰。
(1) 光敏电阻:
小。
检测炉膛内是否有 光照越强,阻值越
使M4.0失电,M4.0触点断开,使T33断电,其触点因未达到闭合时间继续断开,维持
M1.0为断电状态。到46秒时,T34断开,风压保护I1.0己闭合,使M2.0仍有电。正常
点火时序控制结束。
第28页/共45页
•
如果点火时序控制从40秒时开始点火,延时时间超过7秒,光电池仍未感受到炉膛火
焰的照射,I2.7短开,M31.0失电,M31.2失电,M4.0得电,使M4.0触点一直保持闭
接线图
第25页/共45页
•
辅锅炉燃烧时序的PLC控制过程
• ⑴ 起动前的准备
• ① 合上总电源开关,控制电路接通电源。
• ② 若炉内水位低于危险低水位,I1.2断开,M8.0不 工作,锅炉无法自动起动。此时应将给水泵旋钮放 在“手动”位置,I0.2闭合,Q0.0闭合,起动水泵 向炉内供水,当水位上升到正常水位后,水泵旋钮 放在“停”位置,水泵停止工作。
第12页/共45页
•三、油轮辅锅炉蒸汽压力控制系统
•
油轮辅锅炉燃烧控制的特点:
两个控制回路:主调节回路(汽压控制回路)和副调节回路(空气量控制回 路)
第13页/共45页
•函数发生器:
• ——为了保证完全燃烧,需最佳风油比。 • 喷油量与空气压力之间的关系曲线:
第14页/共45页
第一章 轮机自动化基础知识完整PPT
(1)积分时间的物理意义
输入一个阶跃偏差后积分输出等于比例输出所需的时间就是 积分时间
(2)Ti越小,积分输出达到比例输出的时间越短,积分作用越 强
(3) Ti值不能准确地整定,宁大勿小
(4)范围在3s到20min之间
第二十三页
四.比例微分作用规律 1.微分作用--能预示控制对象受扰动的猛烈程度,能在
偏差出现之前,提前改变调节阀的开度。 2.实际微分作用:
第二十四页
3.比例微分作用--在比例作用的基础上,加微分作用用; 比例作用主要,决定调节阀的开度的变化量;微分作用辅 助,起超前控制作用。
4.微分作用时间的大小是衡量微分作用强弱的参数。 5.比例微分调节器与比例调节器一样,不能消除静态偏差。 6.比例微分输出特性
2)程序控制系统
3)随动控制系统
第六页
四.反馈控制系统的动态过程 1.动态过程特点 1)稳态
2)动态过程
3)特点:是一个衰减振荡过程
2.评定控制系统动态过程品质的指标
1)四种扰动形式:阶跃形式、线性形式、脉冲形式、正
弦形式 2)定值控制系统品质指标
(1)最大动态偏差 (2)衰减率(0.75-0.90)
4)迟延是不可能消除的,只能在控制系统的布置上尽量减少迟延。
开环系统:逻辑控制系统 2%,所需要的时间
5.放大系数:控制对象受到阶跃扰动后,被控量从初始平衡状态达到新稳态值的变化量,把扰动量所放大的倍数。
闭环系统:反馈控制系统 三.反馈控制系统的分类
一.单容控制对象的动态特性 5.放大系数:控制对象受到阶跃扰动后,被控量从初始平衡状态达到新稳态值的变化量,把扰动量所放大的倍数。 3)比例带的物理意义: 1)优点:积分作用规律使被控量能稳定在给定值上,消除静态偏差。
轮机自动化课件 第一章
(4)比例带对系统过渡过程的影响
3、特点
(1)调节及时,且调节器的调节量随偏 差增大以及比例系数增大而增大。 (2)一般调节完毕,会有静差出现。
4、适用范围
适用于干扰较小,对象滞后较小, 时间常数较大的调节对象,此时选PB小 些,使静态偏差不致太大,同时又能保 证控制过程有足够的稳定性。
眼
锅炉
1
脑 2
3
5
4
手
锅炉水位的自动控制
1—水位发讯器;2—变送器;3—调节器;4—执行机构;5—给水阀眼源自脑主 机淡水泵 三通阀
手
海水入口
冷却器
海水出口
柴油机气缸冷却水温度手动控制过程
温度变送器
主 机
调节器
淡水泵 三通阀
执行机构
手
冷却器
海水出口 海水入口
柴油机气缸冷却水温度自动控制过程
二、自动控制系统的基本组成
三、比例积分调节规律PI
1、积分调节规律I
(1)概念:调节器的输出与偏差输入对时间的积分成
正比。
p(t ) K I e(t ) dt
式中,KI为积分速度。
从上式可看出:调节器输出信号的大小不仅取决于偏差输入信 号的大小,而主要取决于偏差存在的时间长短。只要有偏差, 尽管偏差可能很小,但它存在的时间越长,输出信号就越大。
第二节 调节器的调节规律
e>0,P>0,正作用调节器;e>0,P<0,反作用调器。
比例P 三种基本调节规律 积分I 组成5种实用调节规律: 微分D
双位调节规律、比例调节规律P、比例积分调节 规律PI、比例微分调节规律PD、比例积分微分调 节规律PID。
轮机自动化1学习.pptx

第7页/共34页
一、温度传感器
(2) 输入输出特性接近线性 (3) 测量精度高:<0℃: ±1℃、
0~100℃: ±0.5℃、 100~650℃: ±0.5% (4) 贵重金属,成本较高 应用:标准温度计,高精度工业测温
第6页/共34页
一、温度传感器
1、热电阻式温度传感器
(2) 铜电阻(Cu)
构成:金属铂丝(0.02~0.07mm)绕制成线圈 特点:(1) 易于提纯,在-50 ~ 150℃范围内性能稳定,价格低
容积式流量传感器 电磁式流量传感器 差压式流量传感器
1、容积式流量传感 第27页/共34页
四、流量传感器
2、电磁式流量传感器
第28页/共34页
四、流量传感器
3、差压式流量传感器
第29页/共34页
四、流量传感器
3、差压式流量传感器
第30页/共34页
五、转速传感器
常见的转速传感器:
测速发电机 磁脉冲式转速传感器
2、热电偶式温度传感器
原理:热电效应(塞贝克效应、 Seebeck effect)。即两种不同性质的导体A、B组成闭合回 路,当导体的节点两端处于不同的温度时,两者之间将产生一热电势,热电势大小与两端温差成 正比。
第8页/共34页
一、温度传感器
2、热电偶式温度传感器
冷端温度补偿:电桥补偿法 适用场合:高温,如主机排气温度的检测
轮机自动化课件 第十二章

• 12、轴带发电机控制模式
•
若船舶配备带有定频齿轮装置的轴带发电机, 主机遥控系统必须启用轴带发电机控制模式,以 避免在主机转速降低时造成发电机跳电和全船停 电。当驾驶台车钟手柄扳至轴带发电机最小运行 转速值以下时,系统自动使主机转速保持在轴带 发电机最小转速值上,待发电机并入电网后使主 机转速随车令下降。
集大轮机自动化
•
二、驾驶台AC-4遥控单元面板
集大轮机自动化
• 第三节 AC-4主机遥控系统的集控室控制单元 • 集控室操作面板有车钟单元面板和AC-4遥控单元
面板两部分,可进行系统的操作、显示、参数调试、模 拟试验及操纵部位转换等,并提供主机控制过程的模拟 流程图显示。
• 一、集控室车钟单元面板 • 集控室车钟单元面板包括主车钟、副车钟、指示灯、
集大轮机自动化
• 3、正常起动 • 正常起动时,起动电磁阀动作,向主机提供 3M Pa的起动空气。与此同时,主机遥控系统给 调速阀提供一个预先设定好的转速设定值。当主 机转速达到正常起动的发火转速时,切断起动空 气并开始供油。预先设定好的转速设定值只持续 6s左右,随后被驾驶台的转速设定值所取代。 • 4、重复起动 • 若起动空气切断后,主机未能正常发火燃烧, 则系统将自动进行第二次试起动。第二次试起动 的发火转速设定值较高,同时取消调速器中的扫 气空气压力限制和转矩限制。若第三次试起动都 集大轮机自动化 失败,则发出起动失败信号。
• 即随着主机负荷(或气缸温度)的变化增加 气缸润滑油,且当负荷变化超过预定时间时开 始增加气缸润滑油。
集大轮机自动化
• 三、DGS8800e数字调速系统的调速器运行模式 • 1、正常(NORMAL)模式 • 2、空闲(IDLE)模式 • 3、设定值(SETPOINT)模式 • 4、试验(TEST)模式 • 5、校验(CALIBRATION)模式 • 6、自检(SELF TEST)模式
轮机自动化课件 第十三章
• (8)主机接口单元(MEI) • MEI是专门为主机遥控系统的电动部分与主 机的气动操纵系统相接口而设计的。模块提供了 各种与气动操纵系统相接口的开关量和模拟量输 入输出通道。开关量输入包括各种反映主机当前 操作状态的开关量信息。开关量输出包括继电器 触点输出和可直接驱动电磁阀电压输出。模拟量 输入包括来自扫气空气压力、起动空气压力和转 速设定信号。模拟量输出包括电子VIT控制信号 和送至机旁转速表的指示信号等。
• • (1)模拟量输入模块(RAi-16) • RAi-16是一个具有16个通道的模拟量输入模块,每 个通道的输入类型可以是电压、电流或电阻信号,具有 内建的量程和量纲转换功能和参数越限报警功能。除此 之外,模块还包含一个计数器通道,计数频率为5~ 500Hz。此模块适用于检测机舱的各种温度、压力、液 位和转速等模拟量信号。必要时,RAi-16也可当作开关 量输入模块来使用。 • (2)开关量输入模块(RDi-32、RDi-32A) • RDi-32和RDi-32A都是具有32个通道的开关量输入 模块,RDi-32为触点输入,RDi-32A为24VAC或24 VDV电压信号输入。当输入状态异常时,能够发出开 关量报警,并由发光二极管(LED)指示每个输入通道 的输入状态。用于检测各种机舱设备的运行状态、阀门 集大轮机自动化 位置等开关量信号。
集大轮机自动化
• (4)调速器脱开 • 机旁操作时,油门拉杆应通过离合器从调速 器执行机构断开,合向手动拉杆。否则,不允许 起动。 • (5)封锁主起动阀 • 基于安全的考虑,当主机停止工作时,主起 动阀必须手动置于封锁位置。因此,在进行主机 起动之前,必须将主起动阀置于工作位置。 • (6)封锁空气分配器
集大轮机自动化
集大轮机自动化
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
返回最近
返回最近
三、转速限制回路
为防止主机在加速过程中因加速过快导致超负 荷,在转速发讯回路的输出端与调速器输入端之间 ,要设置各种转速限制环节,转速限制环节的输出 信号才是转速的给定值。
制动逻辑回路的表达式为
YBR=YBRD+YBRF=YBL·YRT ·YSL·n S· IE +YBL·YRT ·YSL·YSC 从强制制动的逻辑表达式可以看出,强制制动是在车令与
转向不一致且已停油的情况下进行的起动;而能耗制动则只是
在满足能耗制动条件时使空气分配器投入工作而已。因此,制 动逻辑回路在遥控系统中不是独立存在的,而是附加在起动回
返回本节
起动供油实例
根据供油时刻的不同,主机的起动有两种类型: “油一气并进”和“油一气分进”。
1、油一气并进 图3-4-6
在起动的同时就解除油门零位连锁,提供起动 油量,起动成功后,再转换为车令所设定的油量。 2、油一气分进 图3-4-7 起动过程中停油伺服器仍把油门推向零位,在 达到发火转速,切断起动空气的同时提供起动油量 ,并维持起动油量数秒钟后,再切换为车令设定的 转速值。
YBRF =1时满足强制制动逻辑条件,可进行强制制动。
由于换向完成信号 YRF 就是起动鉴别逻辑 YSL,YRF =YSL。 在强制制动逻辑条件中,我们强调了转速条件 nS,实际上它是应
该满足起动准备逻辑条件的,即Ysc为1。这样,强制制动逻辑表
达式可改写为 YBRF=YBL·YRT ·YSL ·YSC
路上,并且借用起动逻辑回路的功能来达到能耗或强制制动的
目的。
返回本节
从制动角度看,当主机转速下降到零(认为车令与转向已经一 致)时,因 YBL 为 0 , YBR 为 0 ,即制动过程结束,但为了能使主 机在制动结束后继续在反方向起动,在遥控系统设计时还必须想 办法使系统不会因强制制动的结束而封锁起动回路。其实现方法 因遥控系统类型的不同而异,如在无触点电路中可采用记忆单元 的办法,而在计算机控制的系统中则可方便地利用计算机程序实
由于换向完成信号 YRF 就是起动鉴别逻辑 YSL,YRF =YSL。 在强制制动逻辑条件中,我们强调了转速条件 nS,实际上它是应
该满足起动准备逻辑条件的,即Ysc为1。这样,强制制动逻辑表
达式可改写为 YBRF=YBL·YRT ·YSL ·YSC
返回本节
3、制动回路逻辑图
制动逻辑回路是由能耗制动和强制制动两部分组成的,故
2)必须有应急起动指令 IE(在发开车指令的同时,按
应急操纵按钮),或者有重复起动信号F(第一次起动
为正常起动,第二、三次起动为重起动),或者有倒 车车令IS(倒车起动性能不如正车); 3)起动转速未达到重起动发火转速,nH = 1。 重起动YSH的逻辑表达式为: YSH = YSO· nH(IE + IS + F)
返回本节
能耗制动的逻辑条件
1)制动的鉴别逻辑 YBL I H R H I S R S
2)换向已经完成
3)已经停油
YRF 1
YRT 1
4)转速高于发火转速 n S 1 5)有应急操作指令
IE 1
返回本节
能耗制动的逻辑条件
这些条件应该是“与”的关系,其逻辑表达式为
YBRO= YRF ·YRT · YBL· n S ·I E = (IHCH+ISCS)· (IH·R H 十IS· RS)· YRT · n S ·I E YBRO=1时满足能耗制动逻辑条件,可进行能耗制动。
二、重复起动逻辑回路
1、时序逻辑控制方式 2、时序—转速逻辑控制方式 三、重起动逻辑回路
所谓重起动是指,在一些特殊条件下的起动过 程,目的在于保证起动的成功。
1、重起动的逻辑条件
返回最近
返回最近
1、重起动的逻辑条件
1)必须满足起动的逻辑条件,YSO为1,因为重起动也
是起动,因此,YSC、YSL必须均为1;
3)转速条件 转速低于换向转速nR或应急换向转速nER
4)顶升机构抬起
Dup=1
返回本节
换向的逻辑条件表达式
YR YRL YRT (n R n ER ) Dup ( I H C H I S C S )YRT (n R n ER ) Dup
2、双凸轮换向的逻辑图
返回本节
慢转起动阀 VSL YSLO 慢转起动信号
主起动阀
起动空气气源
起动系统 起动阀 VA YSO 起动信号 图 3-2-7 控制主起动阀开度的慢转起动方案图 返回最近
关 去起动阀 VB VA
开
关
开 VSL )( V’A
V’B 慢转信号 VSLO
VC
起动信号YSO
气源
返回最近
图 3-2-8 采用主、辅起动阀控制的慢转实现方案图
现,至于气动系统,请参见气动遥控系统实例。
返回本节
应当指出的是,能耗制动是在较高转速上的一种制动方 式,效果较为明显,此时如采用强制制动,不仅要消耗
过多的起动空气,而且不易制动成功。而在较低的转速
范围内采用强制制动,对克服螺旋桨水涡轮作用,使主
n
机更快地停下来是很有效的。在中速机中,往往是采用 能耗制动和强制制动相结合的制动方案;在大型低速柴 油机中,主机从停油到换向完成,其转速已降到比较低
返回本节
2、强制制动
强制制动的原理是:在主机运行中将车令手柄扳至
反方向,当换向完成,且转速低于发火转速时,打开
空气分配器和主起动阀,使高压空气按照与主机运转 方向相反的顺序,即气缸处于压缩冲程时进入各个气 缸,起到强行阻止活塞向上运动的作用,进而迫使主
机减速。
返回本节
强制制动与能耗制动的不同点
1. 对于所有主机,只要在运行中换向完成后,都能
YR =IH RH+IS RS =1;
3)无自动停车信号,即 ST 为1。
图3-4-5
这些条件是“与”的关系,只有满足了这些逻辑条 件,才能将转速指令发送到系统中。 返回本节
返回最近
至于怎样保证上述条件得到满足,则因具体系统而异 。实际上,在许多遥控系统中,并不专门设置这样的 逻辑回路,只是将上述逻辑概念融合到系统的设计之 中,使上述条件在系统中得到分散落实而已。
返回本节
1)制动的鉴别逻辑。即车令与主机转向不一致, 即YBL为1。
2)换向已经完成,YRF为1。
3)满足停油条件,YRT为1。 4)主机转速低于发火转速,nS为1。 这些逻辑条件应该是“与”的关系,其逻辑表达式为 YBRF=YBL·YRF ·YRT · nS
YBRF =1时满足强制制动逻辑条件,可进行强制制动。
(b)
速放阀结构原理及逻辑符号图
5
4 1
2
(a)
比例阀结构原理及逻辑符号图
(b)
(b) P
AS (c)
AH
(a)
1-滚轮;2-顶锥;3-上滑阀;4-进排气球 阀; 5- 下滑阀; 6- 膜片; 7 、 8 、 9- 弹簧 ;10-调整螺钉;P-气源;B-输出口;C通大气端
转速设定精密调压阀结构原理及输出特性图
进行强制制动,而不必有应急操纵指令; 2. 只有主机低于发火转速时才能进行强制制动; 3. 空气分配器与主起动阀均投入工作,气缸在压缩
冲程进起动空气,强迫主机停止运行。
返回本节
1)制动的鉴别逻辑。即车令与主机转向不一致, 即YBL为1。
2)换向已经完成,YRF为1。
3)满足停油条件,YRT为1。 4)主机转速低于发火转速,nS为1。 这些逻辑条件应该是“与”的关系,其逻辑表达式为 YBRF=YBL·YRF ·YRT · nS
2 3 4 5
2 3
4 5
正车信号 倒车信号
1
Ⅳ
6
Ⅲ
Ⅰ
1 6 Ⅱ
多路阀结构原理图及逻辑符号图
C 滑阀 A B
(a) C A A
(a) B
B
(b)(b)C Nhomakorabea双座止回阀逻辑符号图
联动阀逻辑符号图
2
1
(a)
3
A
(b)
B
单向节流阀结构原理及逻辑符号图
(a) 分级延时阀结构原理及逻辑符号图
(b)
(a) A B
1.慢转起动的逻辑条件
1)起动前主机停车时间超过规定的时间; 2)没有应急取消慢转指令; 3)没有达到规定的转数或规定的慢转时间; 4)没有重起动信号; 5)满足起动的逻辑条件
YSLD S TD I SC R1 YSH YSO
返回本节
2、慢转起动逻辑回路的功能
慢转起动逻辑回路应该能够检测慢转逻辑条件,
二、转速发讯回路
1、转速指令发讯器 1)气动指令发讯器 2)电位器式指令发讯器 3)继电器式指令发讯器
图3-4-2 图3-4-3 图3-4-4
返回最近
返回最近
返回最近
返回最近
2、转速指令发送逻辑回路
根据操作者的要求,车钟手柄是可以任意扳动的, 也就是转速是可以任意设定的。但是要把这个信号 发送出去,以改变对主机的供油量,需要满足一些 逻辑条件,如: 1)必须有正车或倒车车令,即IH =1或IS =1; 2)车令与主机转向必须一致,即
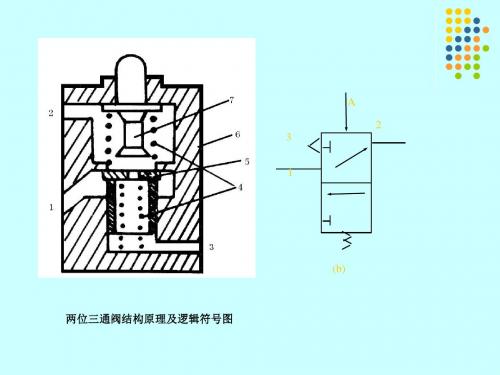
A
2 3 1
(b)
两位三通阀结构原理及逻辑符号图
(a)
(b)
(c)
(d)
(e)
各种两位三通阀逻辑符号图
P 6 A B 7 (a) (b) 5
三位四通阀结构原理及逻辑符号图
1-阀体;2-左滑阀;3-弹簧;4-右滑阀;5-倒车信号;6-正车信号;7-连锁信号 ;A-正车换向口;B-倒车换向口;P-气源口
返回本节
1、能耗制动
能耗制动是指,主机在运行中完成应急换向后,在 主机高于发火转速情况下所进行的一种制动。常常 是在应急操纵的情况下进行。其原理是保持主起动 阀处于关闭状态,让空气分配器投入工作,此时由 于换向已经完成,空气分配器是按与主机运转方向 相反的顺序打开个气缸起动阀,当某个气缸的气缸 起动阀打开时正好处在压缩冲程。柴油机相当于一 台压气机,快速消耗柴油机运动部件的惯性能,使 主机转速能以较快的速度下降。