柱坐标系与球坐标系的简介
柱坐标系和球坐标系简介
z
P( ρ ,θ , z )
z
o
θ
x
y
ρ
Q
思考: 思考: 1、给定一个底面半径为r,高为 的圆柱, 、给定一个底面半径为 ,高为h的圆柱 的圆柱, 建立柱坐标系, 建立柱坐标系,利用柱坐标描述圆柱侧 面以及底面上点的位置。 面以及底面上点的位置。 2、举例说明柱坐标系在日常生活中的应 、 用。
空间点P的直角坐标( x, y, z )与柱坐标( ρ , θ , z ) 之间的变换公式为 x = ρ cos θ { y = ρ sin θ z=z
0
z
P(r , ,θ )
r
o
θ
x Q
y
思考: 思考: 在研究空间图形的几何特征时, 在研究空间图形的几何特征时,我们应 该怎样选择坐标系呢? 该怎样选择坐标系呢? 思考: 思考: 1、请利用球坐标系说明人们如何确定地面 、 上一点的位置 2、举例说明球坐标系在日常生活中的应用。 、举例说明球坐标系在日常生活中的应用。
练习: 1、设点M的直角坐标是(1, 3 ,3), 则它的柱 坐标是?
4π (2, ,3) 3
π
6 ,7), 求它的直角坐标。
2、设点M的柱坐标为(2,
( 3,1,7)
2、球坐标系 、 思考: 思考: 在航天领域,人们怎样确定航天器的 在航天领域, 准确位置呢? 准确位置呢?
Z P
o Q
y
X
一般地,建立空间直角坐标系Oxyz, 设P是空间 任意一点,连接OP,记 OP =r,OP与Oz轴正 向所夹的角为,设P在Oxy平面上的射影为Q, Ox轴按逆时针方向旋转到OQ时所转过的最小 正角为θ,这样P点的位置就可以用有序数组 (r , , θ )表示,这样,空间点与有序数组(r , , θ ) 之间建立了一种对应关系,
高中数学新人教A版选修4-4 柱坐标系与球坐标系简介
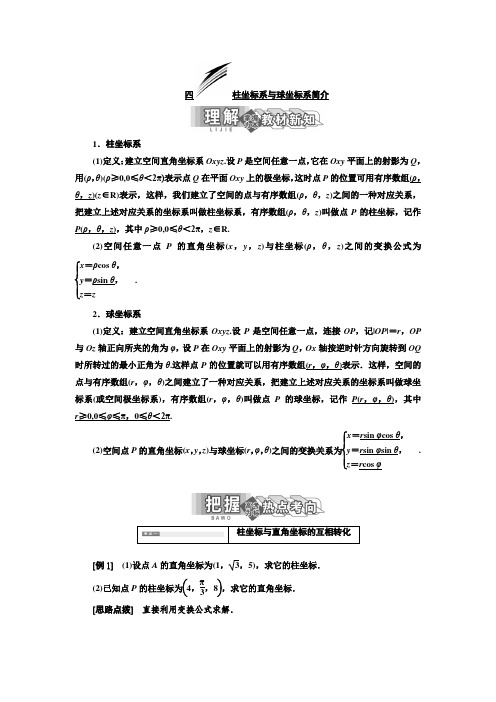
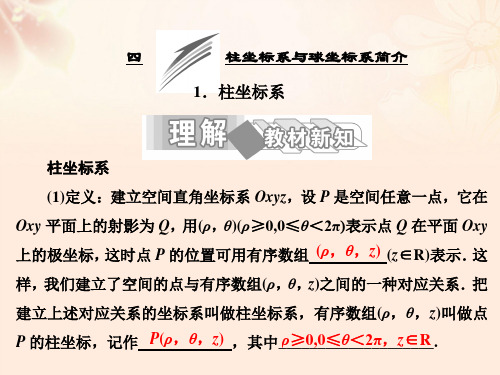
四柱坐标系与球坐标系简介1.柱坐标系(1)定义:建立空间直角坐标系Oxyz .设P 是空间任意一点,它在Oxy 平面上的射影为Q ,用(ρ,θ)(ρ≥0,0≤θ<2π)表示点Q 在平面Oxy 上的极坐标,这时点P 的位置可用有序数组(ρ,θ,z )(z ∈R)表示,这样,我们建立了空间的点与有序数组(ρ,θ,z )之间的一种对应关系,把建立上述对应关系的坐标系叫做柱坐标系,有序数组(ρ,θ,z )叫做点P 的柱坐标,记作P (ρ,θ,z ),其中ρ≥0,0≤θ<2π,z ∈R.(2)空间任意一点P 的直角坐标(x ,y ,z )与柱坐标(ρ,θ,z )之间的变换公式为⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,z =z.2.球坐标系(1)定义:建立空间直角坐标系Oxyz .设P 是空间任意一点,连接OP ,记|OP |=r ,OP 与Oz 轴正向所夹的角为φ,设P 在Oxy 平面上的射影为Q ,Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为θ.这样点P 的位置就可以用有序数组(r ,φ,θ)表示.这样,空间的点与有序数组(r ,φ,θ)之间建立了一种对应关系,把建立上述对应关系的坐标系叫做球坐标系(或空间极坐标系),有序数组(r ,φ,θ)叫做点P 的球坐标,记作P (r ,φ,θ),其中r ≥0,0≤φ≤π,0≤θ<2π.(2)空间点P 的直角坐标(x ,y ,z )与球坐标(r ,φ,θ)之间的变换关系为⎩⎪⎨⎪⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ.[例1] (1)设点A 的直角坐标为(1,3,5),求它的柱坐标. (2)已知点P 的柱坐标为⎝⎛⎭⎫4,π3,8,求它的直角坐标. [思路点拨] 直接利用变换公式求解.[解] (1)由变换公式⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,得ρ2=x 2+y 2,z =z ,即ρ2=12+(3)2=4,∴ρ=2. tan θ=yx =3,又x >0,y >0.∴θ=π3,∴点A 的柱坐标为⎝⎛⎭⎫2,π3,5. (2)由变换公式⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,z =z得x =4cos π3=2,y =4sin π3=23,z =8.∴点P 的直角坐标为(2,23,8).由直角坐标系中的直角坐标求柱坐标,可设点的柱坐标为(ρ,θ,z ),代入变换公式⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,z =z求ρ,也可利用ρ2=x 2+y 2,求ρ.利用tan θ=yx 求θ,在求θ的时候特别注意角θ所在的象限,从而确定θ的值;同理,可由柱坐标转化为直角坐标.1.已知点M 的直角坐标为(0,1,2),求它的柱坐标. 解:ρ=x 2+y 2=02+12=1.∵x =0,y >0,∴θ=π2,∴点M 的柱坐标为⎝⎛⎭⎫1,π2,2. 2.将下列各点的柱坐标分别化为直角坐标. (1)⎝⎛⎭⎫2,π6,1;(2)⎝⎛⎭⎫6,5π3,-2;(3)()1,π,0. 解:设点的直角坐标为(x ,y ,z ). (1)∵(ρ,θ,z )=⎝⎛⎭⎫2,π6,1,∴⎩⎪⎨⎪⎧x =ρcos θ=2cos π6=3,y =ρsin θ=2sin π6=1,z =1,∴(3,1,1)为所求.(2)∵(ρ,θ,z )=⎝⎛⎭⎫6,5π3,-2, ∴⎩⎪⎨⎪⎧x =ρcos θ=6cos 5π3=3,y =ρsin θ=6sin 5π3=-33,z =-2,∴(3,-33,-2)为所求.(3)∵(ρ,θ,z )=(1,π,0),∴⎩⎪⎨⎪⎧x =ρcos θ=cos π=-1,y =ρsin θ=sin π=0,z =0,∴(-1,0,0)为所求.[例2] (1)已知点P 的球坐标为⎝⎛⎭⎫4,3π4, π4,求它的直角坐标; (2)已知点M 的直角坐标为(-2,-2,-22),求它的球坐标. [思路点拨] 直接套用坐标变换公式求解. [解] (1)由坐标变换公式得, x =r sin φcos θ=4sin3π4cos π4=2, y =r sin φsin θ=4sin 3π4sin π4=2,z =r cos φ=4cos 3π4=-22,故其直角坐标为(2,2,-22). (2)由坐标变换公式得,r =x 2+y 2+z 2=(-2)2+(-2)2+(-22)2=4. 由r cos φ=z =-22,得cos φ=-22r =-22,φ=3π4. 又tan θ=y x =1,则θ=5π4(M 在第三象限),从而知M 点的球坐标为⎝⎛⎭⎫4,3π4,5π4.由直角坐标化为球坐标时,可设点的球坐标为(r ,φ,θ),利用变换公式⎩⎪⎨⎪⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ求出r ,φ,θ即可;也可以利用r 2=x 2+y 2+z 2,tan θ=y x ,cos φ=zr来求.要特别注意由直角坐标求球坐标时,要先弄清楚φ和θ所在的位置.3.将下列各点的球坐标分别化为直角坐标. (1)⎝⎛⎭⎫2,π6,π3;(2)⎝⎛⎭⎫6,π3,2π3. 解:设点的直角坐标为(x ,y ,z ). (1)∵(r ,φ,θ)=⎝⎛⎭⎫2,π6,π3, ∴⎩⎪⎨⎪⎧x =r sin φcos θ=2sin π6cos π3=12,y =r sin φsin θ=2sin π6sin π3=32,z =r cos φ=2cos π6=3,∴⎝⎛⎭⎫12,32,3为所求.(2)∵(r ,φ,θ)=⎝⎛⎭⎫6,π3,2π3, ∴⎩⎪⎨⎪⎧x =r sin φcos θ=6sin π3cos 2π3=-332,y =r sin φsin θ=6sin π3sin 2π3=92,z =r cos φ=6cos π3=3,∴⎝⎛⎭⎫-332,92,3为所求.4.求下列各点的球坐标.(1)M (1,3,2);(2)N (-1,1,-2). 解:(1)由变换公式得,r =x 2+y 2+z 2=12+(3)2+22=2 2. 由z =r cos φ,得cos φ=z r =222=22,∴φ=π4,又tan θ=y x =31=3,x >0,y >0,∴θ=π3,∴它的球坐标为⎝⎛⎭⎫22,π4,π3. (2)由变换公式得,r =x 2+y 2+z 2=(-1)2+12+(-2)2=2. 由z =r cos φ,得cos φ=z r =-22,∴φ=3π4.又tan θ=y x =1-1=-1,x <0,y >0,∴θ=3π4,∴它的球坐标为⎝⎛⎭⎫2,3π4,3π4.一、选择题1.在球坐标系中,方程r =2表示空间的( ) A .球 B .球面 C .圆D .直线解析:选B r =2,表示空间的点到原点的距离为2,即表示球心在原点,半径为2的球面.2.设点M 的直角坐标为(-1,-3,3),则它的柱坐标是( ) A.⎝⎛⎭⎫2,π3,3 B.⎝⎛⎭⎫2,2π3,3 C.⎝⎛⎭⎫2,4π3,3 D.⎝⎛⎭⎫2,5π3,3 解析:选C ρ=(-1)2+(-3)2=2,∵tan θ=y x =3,x <0,y <0,∴θ=4π3,又z=3,∴点M 的柱坐标为⎝⎛⎭⎫2,4π3,3. 3.若点M 的球坐标为⎝⎛⎭⎫8,π3,5π6,则它的直角坐标为( ) A .(-6,23,4) B .(6,23,4) C .(-6,-23,4)D .(-6,23,-4)解析:选A 由x =8sin π3cos 5π6=-6,y =8sin π3sin 5π6=23,z =8cos π3=4,得点M 的直角坐标为(-6,23,4).4.若点M 的直角坐标为(3,1,-2),则它的球坐标为( ) A.⎝⎛⎭⎫22,3π4,π6 B.⎝⎛⎭⎫22,π4,π6C.⎝⎛⎭⎫22,π4,π3D.⎝⎛⎭⎫22,3π4,π3 解析:选A 设M 的球坐标为(r ,φ,θ),r ≥0,0≤φ≤π,0≤θ<2π,则r =(3)2+12+(-2)2=22, 由22cos φ=-2得φ=3π4, 又tan θ=13=33,x >0,y >0,得θ=π6,∴点M 的球坐标为⎝⎛⎭⎫22,3π4,π6.故选A. 二、填空题5.点P 的柱坐标为⎝⎛⎭⎫4,π6,3,则点P 到原点的距离为________. 解析:x =ρcos θ=4cos π6=23,y =ρsin θ=4sin π6=2.即点P 的直角坐标为(23,2,3),其到原点的距离为(23-0)2+(2-0)2+(3-0)2=25=5.答案:56.点M (-3,-3,3)的柱坐标为________. 解析:ρ=x 2+y 2=(-3)2+(-3)2=32,∵tan θ=-3-3=1,x <0,y <0,∴θ=5π4,∴点M 的柱坐标为⎝⎛⎭⎫32,5π4,3. 答案:⎝⎛⎭⎫32,5π4,3 7.已知点M 的直角坐标为(1,2,3),球坐标为(r ,φ,θ),则tan φ=________,tan θ=________.解析:如图所示,tan φ=x 2+y 2z =53,tan θ=y x =2.答案:532 三、解答题8.设点M 的直角坐标为(1,1,2),求点M 的柱坐标与球坐标. 解:由坐标变换公式,可得ρ=x 2+y 2=2, ∵tan θ=y x =1,x >0,y >0,∴θ=π4.r =x 2+y 2+z 2=12+12+(2)2=2. 由r cos φ=z =2(0≤φ≤π),得cos φ=2r =22,φ=π4. 所以点M 的柱坐标为⎝⎛⎭⎫2,π4,2,球坐标为⎝⎛⎭⎫2,π4,π4. 9.已知点M 的柱坐标为⎝⎛⎭⎫2,π4,3,点N 的球坐标为⎝⎛⎭⎫2,π4,π2,求线段MN 的长度. 解:设点M 的直角坐标为(x ,y ,z ),由变换公式得,x =ρcos θ=2cos π4=1,y =ρsin θ=2sin π4=1,z =3,∴点M 的直角坐标为(1,1,3),设点N 的直角坐标为(a ,b ,c ), 则a =ρsin φ·cos θ=2×22×0=0,b =ρsin φ·sin θ=2×22×1=2,c =ρcos φ=2×22=2,∴点N 的直角坐标为(0,2,2).∴|MN |=12+(1-2)2+(3-2)2=15-8 2.10.已知正方体ABCD -A 1B 1C 1D 1的棱长为1,如图所示建立空间直角坐标系A -xyz ,以Ax 为极轴.求点C 1的直角坐标,柱坐标以及球坐标.解:点C 1的直角坐标为(1,1,1),设点C 1的柱坐标为(ρ,θ,z ),球坐标为(r ,φ,θ),其中ρ≥0,r ≥0,0≤φ≤π,0≤θ<2π,由坐标变换公式⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,z =z ,且⎩⎪⎨⎪⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ,得⎩⎪⎨⎪⎧ ρ=x 2+y 2,tan θ=y x (x ≠0),且⎩⎪⎨⎪⎧r =x 2+y 2+z 2,cos φ=z r ,得⎩⎨⎧ρ=2,tan θ=1,且⎩⎪⎨⎪⎧r =3,cos φ=33.结合图形,得θ=π4,由cos φ=33得tan φ= 2.所以点C 1的直角坐标为(1,1,1),柱坐标为⎝⎛⎭⎫2,π4,1,球坐标为⎝⎛⎭⎫3,φ,π4,其中tan φ=2,0≤φ≤π.。
坐标系柱坐标系与球坐标系简介

坐标系柱坐标系与球坐标系简介pptxx年xx月xx日contents •引言•坐标系柱坐标系•坐标系球坐标系•柱坐标系与球坐标系的比较•如何选择合适的坐标系•坐标系在科学领域的应用及发展目录01引言描述物体位置和运动的基本工具为定量描述提供基础应用于不同领域如物理、地理、工程等坐标系在科学领域的重要性坐标系基本概念及分类直角坐标系极坐标系Array基于距离和角度基于三个互相垂直的坐标轴圆柱坐标系球坐标系基于距离、角度和高度基于距离、角度和极角本次报告的主要内容比较两种坐标系的优缺点和适用范围举例说明在物理学和工程学中的应用柱坐标系与球坐标系的定义、性质和应用02坐标系柱坐标系1柱坐标系基本概念23是三维坐标系的一种,利用长度、角度和高度来描述点的位置。
柱坐标系以长度为r、角度为θ、高度为z三个参数来表示点的位置。
圆柱坐标系以球半径R、角度θ和 φ来表示点的位置,其中θ表示经度,φ表示纬度。
球面坐标系通过将直角坐标系的x、y坐标值分别替换为r和θ角度值,将z 坐标值保持不变即可实现转换。
直角坐标系转换为柱坐标系需要将r、θ和z三个参数转换为x、y、z三个方向的坐标值,其中x=r*cos(θ),y=r*sin(θ),z=z。
柱坐标系转换为直角坐标系柱坐标系与直角坐标系转换1柱坐标系应用举例23在地球物理学中,柱坐标系常被用于描述地球表面和内部的结构和特征。
在电磁学中,柱坐标系常被用于描述圆柱形导体中的电场和磁场分布。
在流体力学中,柱坐标系常被用于描述管道内的流体流动和传热等物理现象。
03坐标系球坐标系球坐标系是三维坐标系的一种,由一个原点、一个在原点正上方的北极点以及一条从原点出发,指向北极点的极轴构成。
球坐标系基本概念定义径向距离、角度和高度。
三个基本元素在球坐标系中,点的位置由径向距离、角度和高度三个参数确定。
坐标表示直角坐标系转换为球坐标系通过将直角坐标系的三个轴分别投影到球坐标系的三个元素上,可以得到球坐标系表示的点。
第1章 3 柱坐标系和球坐标系
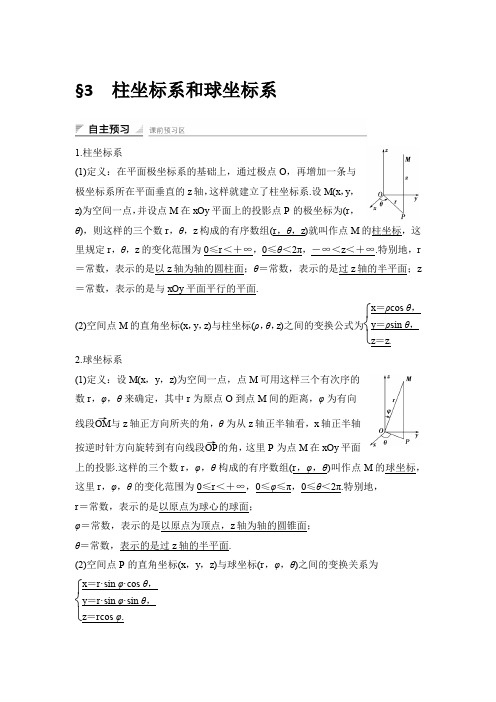
§3 柱坐标系和球坐标系1.柱坐标系(1)定义:在平面极坐标系的基础上,通过极点O ,再增加一条与极坐标系所在平面垂直的z 轴,这样就建立了柱坐标系.设M (x ,y ,z )为空间一点,并设点M 在xOy 平面上的投影点P 的极坐标为(r ,θ),则这样的三个数r ,θ,z 构成的有序数组(r ,θ,z )就叫作点M 的柱坐标,这里规定r ,θ,z 的变化范围为0≤r <+∞,0≤θ<2π,-∞<z <+∞.特别地,r =常数,表示的是以z 轴为轴的圆柱面;θ=常数,表示的是过z 轴的半平面;z =常数,表示的是与xOy 平面平行的平面.(2)空间点M 的直角坐标(x ,y ,z )与柱坐标(ρ,θ,z )之间的变换公式为⎩⎨⎧x =ρcos θ,y =ρsin θ,z =z .2.球坐标系(1)定义:设M (x ,y ,z )为空间一点,点M 可用这样三个有次序的数r ,φ,θ来确定,其中r 为原点O 到点M 间的距离,φ为有向线段OM→与z 轴正方向所夹的角,θ为从z 轴正半轴看,x 轴正半轴按逆时针方向旋转到有向线段OP →的角,这里P 为点M 在xOy 平面上的投影.这样的三个数r ,φ,θ构成的有序数组(r ,φ,θ)叫作点M 的球坐标,这里r ,φ,θ的变化范围为0≤r <+∞,0≤φ≤π,0≤θ<2π.特别地, r =常数,表示的是以原点为球心的球面;φ=常数,表示的是以原点为顶点,z 轴为轴的圆锥面; θ=常数,表示的是过z 轴的半平面.(2)空间点P 的直角坐标(x ,y ,z )与球坐标(r ,φ,θ)之间的变换关系为⎩⎨⎧x =r ·sin φ·cos θ,y =r ·sin φ·sin θ,z =r cos φ.【思维导图】【知能要点】 1.柱坐标系. 2.球坐标系.3.空间点的坐标的确定.题型一 柱坐标系柱坐标系又称半极坐标系,它是由平面极坐标系及空间直角坐标系中的一部分建立起来的.空间任一点P 的位置可以用有序数组(ρ,θ,z )表示,(ρ,θ)是点P 在Oxy 平面上的射影Q 的极坐标,z 是P 在空间直角坐标系中的竖坐标. 【例1】 柱坐标满足方程ρ=2的点所构成的图形是什么?解 在平面极坐标系中,ρ=2表示以极点为圆心,2为半径的圆.因此,在柱坐标系中,设Oz 轴所在的直线为l ,则方程ρ=2表示以l 为轴,且垂直于轴的截面是半径为2的圆柱面.【反思感悟】 柱坐标满足ρ=2的点可以和平面直角坐标系中满足x =1的点构成一条直线,空间直角坐标系中满足y =2的点构成的图形是一个平面结合考虑.1.将下列各点的柱坐标化为直角坐标. P ⎝ ⎛⎭⎪⎫2,π6,1,Q ⎝ ⎛⎭⎪⎫4,23π,-3 解直接代入互化公式⎩⎨⎧x =ρcos θy =ρsin θz =z,可得P 的直角坐标为(3,1,1),Q 点的直角坐标为(-2,23,-3).题型二 球坐标系球坐标系又称空间极坐标系,用空间任意一点P 到O 的距离r 以及两个角θ,φ来刻画点P 的位置.【例2】 经过若干个固定和流动的地面遥感观测站监测,并通过数据汇总,计算出一个航天器在某一时刻离地面2 384千米的位置,地球半径为6 371千米,此时经度为80°,纬度为75°.试建立适当的坐标系,确定出此时航天器点P 的坐标.解 在赤道平面上,我们选取地球球心为极点,以O 为端点且与零子午线相交的射线Ox 为极轴,建立平面极坐标系,在此基础上,取以O 为端点且经过北极的射线Oz (垂直于赤道平面)为另一条极轴,如图所示建立一个球坐标系.由已知航天器位于经度为80°,可知θ=80°,由航天器位于纬度75°,可知,φ=90°-75°=15°,由航天器离地面2 384千米,地球半径为6 371千米,可知r =2 384+6 371=8 755千米.所以点P 的球坐标为(8 755,15°,80°).【反思感悟】 写空间任一点的球半径,就是求该点到点O 的距离和方位角、高低角.两个角可以和地球的经纬度相结合,要搞清它们的联系和区别.2.在赤道平面上,我们选取地球球心O 为极点,以O 为端点且与零子午线相交的射线Ox 为极轴,建立坐标系.有A ,B 两个城市,它们的球坐标分别为A ⎝ ⎛⎭⎪⎫R ,π4,π6,B ⎝ ⎛⎭⎪⎫R ,π4,2π3,飞机应该走怎样的航线最快,所走的路程有多远?解 由题意可知面AOO 1,面BOO 1都垂直于两圆平面, ∴∠AO 1B 是两平面AOO 1和BOO 1的夹角, 又∵A ⎝ ⎛⎭⎪⎫R ,π4,π6,B ⎝ ⎛⎭⎪⎫R ,π4,2π3,∴∠AO 1B =2π3-π6=π2, ∠AOO 1=∠BOO 1=π4, ∠AO 1O =∠BO 1O ,∴小圆O1的半径r=22R,∴AB=R,∴∠AOB=π3,则经过A、B两地的球面距离为π3R.故飞机经过A、B两地的大圆,航线最短,其路程为π3R.题型三空间点的坐标1.空间直角坐标系中点的坐标是由横坐标、纵坐标和竖坐标三度来确定的,即(x,y,z).2.空间点的柱坐标是由平面极坐标系及空间直角坐标系中的竖坐标组成的,即(ρ,θ,z).3.(1)空间点的球坐标是点和原点的连线与x轴正方向所成的角θ,与z轴的正方向所成的角φ,以及点到原点的距离r组成的,即(r,φ,θ).(2)注意球坐标的顺序为:①到原点的距离r;②与z轴正方向所成的角φ;③与x轴正方向所成的角θ.【例3】已知长方体ABCD—A1B1C1D1的边长为AB=14,AD=6,AA1=10,以这个长方体的顶点A为坐标原点,以射线AB、AD、AA1分别为Ox、Oy、Oz 轴的正半轴,建立空间直角坐标系,求长方体顶点C1的空间直角坐标,球坐标,柱坐标.分析如图所示,此题是考查空间直角坐标,球坐标,柱坐标的概念,我们要能借此区分三个坐标,找到它们的相同和不同来.C1点的(x,y,z),分别对应着CD、BC、CC1,C1点的(ρ,θ,z)分别对应着CA、∠DCA、CC1,C1点的(r,φ,θ)分别对应着AC1、∠A1AC1、∠BAC.解C1点的空间直角坐标为(14,6,10),C1点的柱坐标为(258,arctan 37,10),C 1点的球坐标为⎝⎛⎭⎪⎫283,arccos 58383,arctan37. 【反思感悟】 注意空间任一点的直角坐标、球坐标和柱坐标的联系和区别,它们都能刻画点的位置,可以进行互化.3.结晶体的基本单位称为晶胞,图(1)是食盐晶胞的示意图(可看成是八个棱长为12的小正方体堆积成的正方体),图形中的点代表钠原子,其他点代表氯原子,如图(2)所示,建立空间直角坐标系O -xyz 后,试写出全部钠原子所在位置的球坐标,柱坐标.解 把图中的钠原子分成下、中、上三层来写它们所在位置的坐标.下层的原子全部在xOy 平面上,它们所在位置的竖坐标全是0,所以这五个钠原子所在位置的球坐标分别为(0,0,0),⎝ ⎛⎭⎪⎫1,π2,0,⎝ ⎛⎭⎪⎫2,π2,π4,⎝ ⎛⎭⎪⎫1,π2,π2,⎝ ⎛⎭⎪⎫22,π2,π4,它们的柱坐标分别为(0,0,0),(1,0,0),⎝ ⎛⎭⎪⎫2,π4,0,⎝ ⎛⎭⎪⎫1,π2,0,⎝ ⎛⎭⎪⎫22,π4,0; 上层的钠原子所在的平面平行于xOy 平面,与z 轴交点的竖坐标为1,所以,这五个钠原子所在位置的球坐标分别为(1,0,0),⎝ ⎛⎭⎪⎫2,π4,0,⎝ ⎛⎭⎪⎫3,arctan 2,π4,⎝ ⎛⎭⎪⎫2,π4,π2,⎝ ⎛⎭⎪⎫62,arctan 22,π4,它们的柱坐标分别为(0,0,1),(1,0,1),⎝ ⎛⎭⎪⎫2,π4,1,⎝ ⎛⎭⎪⎫1,π2,1,⎝ ⎛⎭⎪⎫22,π4,1. 中层的原子所在的平面平行于xOy 平面,与z 轴交点的竖坐标为12,所以,这四个钠原子所在位置的球坐标分别为⎝ ⎛⎭⎪⎫22,π4,0,⎝ ⎛⎭⎪⎫62,arccos 66,arctan 12,⎝ ⎛⎭⎪⎫62,arccos 66,arctan 2,⎝ ⎛⎭⎪⎫22,π4,π2,它们的柱坐标分别为⎝ ⎛⎭⎪⎫12,0,12,⎝ ⎛⎭⎪⎫52,arctan 12,12,⎝ ⎛⎭⎪⎫52,arctan 2,12,⎝ ⎛⎭⎪⎫12,π2,121.一个圆形体育馆,自正东方向起,按逆时针方向等分为十六个扇形区域,顺次记为一区,二区,…,十六区,我们设圆形体育场第一排与体育中心O 的距离为500 m ,每相邻两排的间距为1 m ,每层看台的高度为0.7 m ,现在需要确定第九区第四排正中的位置A ,请建立适当的坐标系,求出点A 的坐标.解 以圆形体育场中心O 为极点,选取以O 为端点且过正东入口的射线Ox 为极轴,在地平面上建立极坐标系.则点A 与体育场中轴线Oz 的距离为503 m ,极轴Ox 按逆时针方向旋转17π16,就是OA 在地平面上的射影,A 距地面的高度为2.8 m ,因此我们可以用柱坐标来表示点A 的准确位置.所以点A 的柱坐标为⎝ ⎛⎭⎪⎫503,17π16,2.8. 2.一只蚂蚁在一个母线与轴线夹角为π3的圆锥面上从顶点出发盘旋着向上爬行,已知它上升的速度为v >0,盘旋的角速度为ω>0,求t 时刻蚂蚁所在的位置的球坐标.解 取圆锥的顶点O 为坐标原点,建立球坐标系,设t 时刻蚂蚁在点M (r ,φ,θ)处,由题意得θ=ωt ,z =v t ,φ=π3, 由于z r =cos φ=cos π3=12, 于是r =2z =2v t ,所以t 时刻蚂蚁在球坐标系中的位置为M ⎝ ⎛⎭⎪⎫2v t ,π3,ωt , t ∈[0,+∞).3.摊开世界地图,问初次降临地球的外星人:台湾在哪里?阿根廷的Formosa(福尔摩沙)省又位于何处(如图所示)?外星人必然一头雾水,如果你再给他一组数据:.想一想,它们的位置有什么关联?解两地经度差180°,纬度相反.故它们位于地球同一直径的两个端点上.1.空间点的坐标的确定(1)空间直角坐标系中点的坐标是由横坐标、纵坐标和竖坐标三度来确定的,即(x,y,z).(2)空间点的柱坐标是由平面极坐标系及空间直角坐标系中的竖坐标组成的,即(ρ,θ,z).(3)空间点的球坐标是点在Oxy平面上的射影和原点的连线与x轴正方向所成的角θ,点和原点的连线与z轴的正方向所成的角φ,以及点到原点的距离r组成的,即(r,φ,θ).注意球坐标的顺序为:①到原点的距离r;②与z轴正方向所成的角φ;③与x轴正方向所成的角θ.2.球坐标的应用在球坐标系中,它的三度实际上也是我们所熟悉的,它与前面所学的球的一些基本知识是有着密切联系的.我们得熟悉这部分内容.(1)经线与经度:地球球面上从北极到南极的半个大圆叫做经线,规定以经过英国格林尼治天文台原址的经线为0°经线.一个地方的经度是指经过当地经线的所在半平面和0°经线所在半平面之间的夹角的度数,以0°经线为基准,向东度量的为东经,向西度量的为西经.如东经30°,西经60°等.(2)纬线与纬度:与地轴(通过北极和南极的直线)垂直的平面截地球球面所得的圆叫做纬线(纬线圈),其中的大圆叫做赤道.一个地方的纬度是指当地与球心的连线和地球赤道平面之间所成的角的度数,赤道为0°纬线;以赤道为基准,向北度量为北纬,向南度量为南纬.如北纬25°,南纬23.5°.与球坐标比较,点P (r ,φ,θ)中的r 是到球心的距离,φ与纬度是互余的;θ与经度是相关的,若建立适当的坐标系,θ就是经度. 【规律方法总结】1.根据图形的特征,可以选择不同的坐标系来确定点的位置.2.点的直角坐标、柱坐标、球坐标可以相互转化.3.利用柱坐标系、球坐标系解决空间点的位置时,对于含角度的比较方便.一、选择题1.已知点P 的柱坐标为⎝ ⎛⎭⎪⎫2,π4,5,点B 的球坐标为⎝ ⎛⎭⎪⎫6,π3,π6,则这两个点在空间直角坐标系中的点的坐标为( ) A.P 点(5,1,1),B 点⎝ ⎛⎭⎪⎫364,324,62B.P 点(1,1,5),B 点⎝ ⎛⎭⎪⎫364,324,62 C.P 点⎝ ⎛⎭⎪⎫364,324,62,B 点(1,1,5) D.P 点(1,1,5),B 点⎝ ⎛⎭⎪⎫62,364,324 解析 设P 点的直角坐标为(x ,y ,z ),x =2·cos π4=2·22=1,y =2·sin π4=1,z =5. 设B 点的直角坐标为(x ,y ,z ), x =6·sin π3·cos π6=6·32·32=364, y =6·sin π3·sin π6=6·32·12=324,z =6·cos π3=6·12=62.所以,点P 的直角坐标为(1,1,5),点B 的直角坐标为⎝ ⎛⎭⎪⎫364,324,62. 答案 B2.设点M 的直角坐标为(-1,-3,3),则它的柱坐标是( ) A.⎝ ⎛⎭⎪⎫2,π3,3 B.⎝ ⎛⎭⎪⎫2,2π3,3 C.⎝ ⎛⎭⎪⎫2,4π3,3D.⎝ ⎛⎭⎪⎫2,5π3,3 解析 ∵ρ=(-1)2+(-3)2=2,θ=43π,z =3.∴M 的柱坐标为⎝ ⎛⎭⎪⎫2,43π,3.答案 C3.设点M 的直角坐标为(-1,-1,2),则它的球坐标为( ) A.⎝ ⎛⎭⎪⎫2,π4,π4 B.⎝ ⎛⎭⎪⎫2,π4,5π4 C.⎝ ⎛⎭⎪⎫2,5π4,π4D.⎝ ⎛⎭⎪⎫2,3π4,π4 解析 由变换公式r =x 2+y 2+z 2=2,cos φ=z r =22,∴φ=π4.∵tan θ=y x =1,∴θ=54π. ∴M 的球坐标为⎝ ⎛⎭⎪⎫2,π4,54π.答案 B4.点M 的球坐标为⎝ ⎛⎭⎪⎫8,π3,56π则它的直角坐标为( )A.(-6,23,4)B.(6,23,4)C.(-6,-23,4)D.(-6,23,-4)解析 由x =8sin π3cos 5π6=-6,y =8sin π3sin 5π6=23,z =8cos π3=4, 得点M 的直角坐标为(-6,23,4).答案 A5.点P 的柱坐标为⎝ ⎛⎭⎪⎫8,π4,2,则点P 到原点的距离为( ) A.17 B.217 C.417D.817解析 x =8cos π4=42,y =8sin π4=42, ∴柱坐标化为直角坐标为(42,42,2), |OP |=32+32+4=68=217.答案 B 二、填空题6.在球坐标系中A ⎝ ⎛⎭⎪⎫2,π4,π4和B ⎝ ⎛⎭⎪⎫2,3π4,3π4的距离为________.解析 把A 、B 两点的球坐标化为直角坐标为A ()1,1,2, B ()-1,1,-2. |AB |=(1+1)2+(1-1)2+(2+2)2=12=2 3.答案 2 37.在空间的柱坐标系中,方程ρ=2表示________. 解析 在极坐标系中,ρ=2表示圆心在极点半径为2的圆.在柱坐标系中方程ρ=2表示以z 轴为中轴线的,半径为2的圆柱面. 答案 以z 轴为中轴线的,半径为2的圆柱面8.已知点M 的球坐标为⎝ ⎛⎭⎪⎫4,π4,34π,点N 的球坐标为⎝ ⎛⎭⎪⎫4,-π4,34π,则M 、N 两点间的距离为________.解析 x =4sin π4cos 3π4=4·22·⎝ ⎛⎭⎪⎫-22=-2, y =4sin π4sin 3π4=4·22·22=2,z =4cos π4=4·22=22,∴点M 的直角坐标为(-2,2,22).同理点N 的直角坐标为(2,-2,22),∴|MN |=16+16=4 2.答案 4 29.在球坐标系中,方程r =1表示______________________,方程φ=π4表示空间的________________________.解析 r =1表示球心在原点半径为1的球面,φ=π4表示顶点在原点,母线与z 轴夹角为π4的圆锥面.答案 球心在原点,半径为1的球面 顶点在原点,轴截面夹角为π2的圆锥面三、解答题10.如图所示,在长方体OABC -D ′A ′B ′C ′中,|OA |=3,|OC |=5,|OD ′|=3,A ′C ′与B ′D ′相交于点P ,分别写出点C 、B ′、P 的柱坐标.解 C 点的ρ、θ分别为|OC |及∠COA .B ′点的ρ为|OB |=|OA |2+|AB |2=32+52=34;θ=∠BOA ,而tan ∠BOA =|AB ||OA |=53,所以∠BOA =arctan 53.P 点的ρ、θ分别为OE 、∠AOE ,|OE |=12|OB |=342,∠AOE =∠AOB .∴各点的柱坐标为C ⎝ ⎛⎭⎪⎫5,π2,0,B ′⎝ ⎛⎭⎪⎫34,arctan 53,3,P ⎝ ⎛⎭⎪⎫342,arctan 53,3.11.用两平行面去截球,如图,在两个截面圆上有两个点,它们的球坐标分别为A ⎝ ⎛⎭⎪⎫8,π4,θA 、B ⎝ ⎛⎭⎪⎫8,34π,θB ,求出这两个截面间的距离. 解 在△OO 1A 中,由球坐标知∠AOO 1=π4,|OA |=8,∴|OO 1|=8cos ∠AOO 1=8×22=42,同理在△OO 2B 中,|OB |=8,∠O 2OB =π4,∴OO 2=42,∴O 1O 2=82, ∴两个截面间的距离为8 2.12.在柱坐标系中,求满足⎩⎨⎧ρ=1,0≤θ<2π,0≤z ≤2的动点M (ρ,θ,z )围成的几何体的体积.解 根据柱坐标系与点的柱坐标的意义可知,满足ρ=1,0≤θ<2π,0≤z ≤2的动点M (ρ,θ,z )的轨迹是以直线Oz 为轴,轴截面为正方形的圆柱,如图所示,圆柱的底面半径r=1,h =2,∴V =Sh =πr 2h =2π(体积单位).习题1-3 (第22页)1.解 点A 的柱坐标为(3,0,3),球坐标为⎝ ⎛⎭⎪⎫32,π4,0; 点B 的柱坐标为⎝ ⎛⎭⎪⎫2,π2,2,球坐标为⎝ ⎛⎭⎪⎫22,π4,π2; 点C 的柱坐标为⎝ ⎛⎭⎪⎫42,π4,0,球坐标为⎝ ⎛⎭⎪⎫42,π2,π4. 图略2.解 点A 的直角坐标为(-22,22,2);点B 的直角坐标为(3,33,-5). 图略.3.解 点M 的直角坐标为⎝ ⎛⎭⎪⎫12,32,3;点N 的直角坐标为(6,23,4).。
球面坐标系和柱面坐标系的定义及其应用

球面坐标系和柱面坐标系的定义及其应用球面坐标系和柱面坐标系是数学中关键的方法,经常用来描述和解决一些几何和物理问题,它们与直角坐标系、极坐标系一样,是一种坐标系的表示方式。
一、球面坐标系球面坐标系是以球面为基础的坐标系,它是由半径、极角和方位角确定的。
坐标轴上的点对应着球面上的一个点,可以用三个参数(r、θ、φ)来描述它的位置。
其中,r是从坐标原点到球面上某一点的距离,是一个实数;θ是竖直方向的极角,它的范围在0到π之间;φ是水平方向的方位角,它的范围在0到2π之间。
坐标系的原点是球心,竖直方向的坐标轴是与地球赤道垂直的轴线,水平方向的坐标轴则是经过原点和北极点的轴线。
球面坐标系在物理学和天文学等领域应用广泛,例如测量地球上某一点的纬度和经度、描述电磁场的分布等。
二、柱面坐标系柱面坐标系是一种由高度、半径和角度确定的坐标系,它通常用来描述长方形坐标系缺陷的问题。
柱面坐标系可以是圆柱面坐标系或斜柱面坐标系,但都表示同样的信息。
在圆柱坐标系中,一点的坐标为(r,θ,z),其中r表示离坐标轴的距离,θ表示与x轴的夹角,z表示高度。
而在斜柱面坐标系中,一点的坐标为(r,θ,z'),其中r和θ用同样的方式表示,z'是某个平面内的高度。
只有当某一平面中的z'为零时,斜柱面坐标系才与圆柱坐标系相同。
类似于球面坐标系的应用,圆柱坐标系和斜柱坐标系在物理学、工程学和计算机图形学等领域中有广泛的应用。
例如在计算机图形学中,柱面坐标系被用来描述某些对象的形状和运动,在计算机辅助设计(CAD)中,也被用来表示机械元件的三维空间位置。
总的来说,球面坐标系和柱面坐标系是一组非常实用的工具,它们有助于我们更好地理解和描述现实世界中的各种问题。
了解和掌握这些坐标系的基础和应用,有助于我们更好地应用它们来解决实际问题。
柱坐标和球坐标

柱坐标和球坐标柱坐标和球坐标是数学中常用的两种坐标系,它们在描述空间中点的位置时有各自的特点和应用。
本文将介绍柱坐标和球坐标的定义、表示方法以及它们之间的转换关系。
柱坐标柱坐标是三维空间中表示点位置的坐标系之一。
柱坐标通常使用径向距离r、极角 $\\theta$ 和高度z来描述一个点的位置。
在柱坐标系中,点 $(r, \\theta,z)$ 表示距离原点的长度为r,与x轴正向的夹角为 $\\theta$,高度为z的点。
柱坐标系下,点 $(r, \\theta, z)$ 与直角坐标系下的点(x,y,z)之间的关系可以用以下公式表示:$$ \\begin{aligned} x &= r \\cdot \\cos(\\theta) \\\\ y &= r \\cdot\\sin(\\theta) \\\\ z &= z \\end{aligned} $$球坐标球坐标是另一种用于表示三维空间中点位置的坐标系。
球坐标通常使用球径ρ、极角 $\\phi$ 和方位角 $\\theta$ 来描述点的位置。
在球坐标系中,点$(ρ, \\phi,\\theta)$ 表示距离原点的长度为ρ,与z轴正向的夹角为 $\\phi$,与x轴正向的夹角为 $\\theta$ 的点。
球坐标系下,点$(ρ, \\phi, \\theta)$ 与直角坐标系下的点(x,y,z)之间的关系可以用以下公式表示:$$ \\begin{aligned} x &= ρ \\cdot \\sin(\\phi) \\cdot \\cos(\\theta) \\\\ y &= ρ \\cdot \\sin(\\phi) \\cdot \\sin(\\theta) \\\\ z &= ρ \\cdot \\cos(\\phi)\\end{aligned} $$柱坐标和球坐标之间的转换要将柱坐标转换为球坐标,可以使用以下公式:$$ \\begin{aligned} ρ &= \\sqrt{r^2 + z^2} \\\\ \\phi &=\\arctan\\left(\\frac{r}{z}\\right) \\\\ \\theta &= \\theta \\end{aligned} $$ 类似地,要将球坐标转换为柱坐标,可以使用以下公式:$$ \\begin{ali gned} r &= ρ \\cdot \\sin(\\phi) \\\\ z &= ρ \\cdot \\cos(\\phi) \\\\ \\theta &= \\theta \\end{aligned} $$应用和总结柱坐标和球坐标在不同的场景中有着广泛的应用,例如在物理学、工程学和计算机图形学领域。
柱坐标与球坐标系简介

柱坐标与球坐标系简介
在数学和物理学中,柱坐标和球坐标系是描述三维空间中点的两种常用坐标系。
它们为研究三维问题提供了方便的工具,可以使问题的表达和求解更加简洁。
柱坐标系
柱坐标系是一种用圆柱形式来描述三维空间中的点的坐标系。
在柱坐标系中,
一个点的位置由距离原点的长度、与正向x轴的夹角和z坐标组成。
通常用(r, θ, z)来表示一个点的坐标,其中r表示点到原点的距离,θ表示点在x-y平面上的极角,z表示点在z轴上的坐标。
柱坐标系在求解具有轴对称性的问题时特别有用,例如旋转体的体积和表面积
的计算等问题。
球坐标系
球坐标系是通过球坐标来描述三维空间中的点的坐标系。
在球坐标系中,一个
点的位置由距离原点的长度、与正向z轴的夹角和在x-y平面上的极角组成。
通常用(r, θ, φ)来表示一个点的坐标,其中r表示点到原点的距离,θ表示点在x-y平面上的极角,φ表示点在z轴上的极角。
球坐标系常常用于处理具有球对称性或球体几何的问题,例如电场和磁场的计
算等。
它也在计算机图形学和三维建模中被广泛应用。
无论是柱坐标系还是球坐标系,它们都是解决特定类型的问题时十分有效的工具。
通过灵活运用这两种坐标系,我们可以更好地理解和分析三维空间中的问题,为实际问题的求解提供更多的可能性和方法。
柱坐标和球坐标系给了我们描述空间中点位置的不同视角,为解决相关问题提
供了更多的数学工具。
通过学习和掌握这两种坐标系的原理和应用,我们可以在数学和物理领域中更加灵活地处理复杂的三维问题。
高中数学柱坐标系与球坐标系简介
2.设M点的直角坐标为 标.
(1, 求它3的,柱3坐)
(2, 4 , 3)
3
思考:
点P的柱坐标为(ρ,θ, z),
(1)当ρ为常数时,点P的轨迹是____
圆柱面
(2)当θ为常数时,点P的轨迹是___
(3)当z为常数时,
z
点P的轨迹是____平_面
半平面
P(ρ,θ, z)
o θ
x
y Q (ρ,θ)
地球的纬度
地球的纬度与经度:
球坐标系
建立空间直角坐标系Oxyz.设P(x,y,z)是空间
任意一点,记|OP|=r,OP与Oz轴正向所夹的角为j.
点P在Oxy平面上的射影为Q,Ox轴按逆时针方向 旋转到OQ时所转过的最小正角为θ.则P的位置可用
有序数组(r, j, )表示, (r, j , )叫做点P的球坐标.
z P(xρ,,θy, z,)z)
o
x
θ
y Q (ρ,θ)
柱坐标与空间直角坐标的互化
(1)柱坐标转化为直角坐标
x=ρcosθ
y=ρsinθ
z=z
柱坐标与空间直角坐标的互化
(2)直角坐标转化为柱坐标
2 x2 y2
tan
y( x x
0)
z z
练习
1.设P点的柱坐标为 角坐标.
(2, ,求,它7的) 直 6
44
(1,1, 2)
练习
2.设M点的直角坐标为 球坐标是
(1, ,1那, 么它2的)
A.(2, , )
44
C.(2,
5
,
)
44
B.(2, , 5 )
44 D.(2, 3 , )
圆柱坐标系和球坐标系
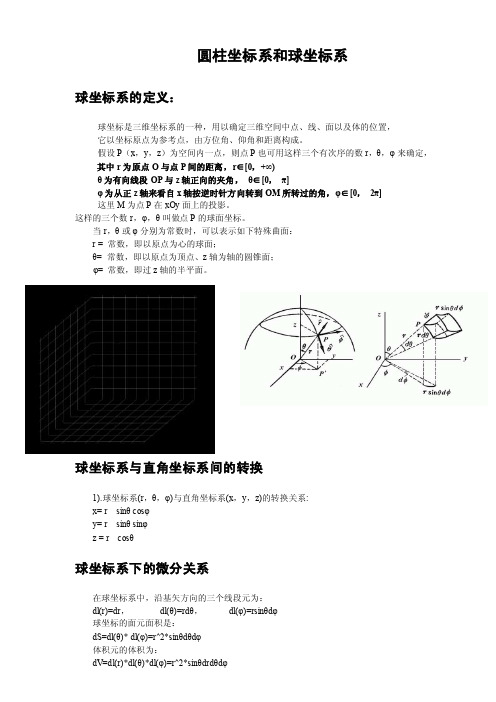
圆柱坐标系和球坐标系球坐标系的定义:球坐标是三维坐标系的一种,用以确定三维空间中点、线、面以及体的位置,它以坐标原点为参考点,由方位角、仰角和距离构成。
假设P(x,y,z)为空间内一点,则点P也可用这样三个有次序的数r,θ,φ来确定,其中r为原点O与点P间的距离,r∈[0,+∞)θ为有向线段OP与z轴正向的夹角,θ∈[0,π]φ为从正z轴来看自x轴按逆时针方向转到OM所转过的角,φ∈[0,2π]这里M为点P在xOy面上的投影。
这样的三个数r,φ,θ叫做点P的球面坐标。
当r,θ或φ分别为常数时,可以表示如下特殊曲面:r = 常数,即以原点为心的球面;θ= 常数,即以原点为顶点、z轴为轴的圆锥面;φ= 常数,即过z轴的半平面。
球坐标系与直角坐标系间的转换1).球坐标系(r,θ,φ)与直角坐标系(x,y,z)的转换关系:x= r sinθ cosφy= r sinθsinφz = r cosθ球坐标系下的微分关系在球坐标系中,沿基矢方向的三个线段元为:dl(r)=dr,dl(θ)=rdθ,dl(φ)=rsinθdφ球坐标的面元面积是:dS=dl(θ)* dl(φ)=r^2*sinθdθdφ体积元的体积为:dV=dl(r)*dl(θ)*dl(φ)=r^2*sinθdrdθdφ圆柱坐标系的定义:它是二维极坐标系往z-轴的延伸。
添加的第三个坐标专门用来表示P点离xy-平面的高低。
按照国际标准化组织建立的约定(ISO 31-11) ,径向距离、方位角、高度,分别标记为。
如图右,P 点的圆柱坐标是。
是P 点与z-轴的垂直距离。
是线OP 在xy-面的投影线与正x-轴之间的夹角。
与直角坐标的等值。
圆柱坐标系与直角坐标系间的转换1).圆柱坐标系(r,φ,z)与直角坐标系(x,y,z)的转换关系:x=r co sφy=r sinφz=z圆柱坐标系下的微分关系在球坐标系中,沿基矢方向的三个线段元为:dl(r)=dr,dl(φ)=rdφ,dl(z)= dz球坐标的面元面积是:dS=dl(θ)* dl(z)=r dφ dz体积元的体积为:dV=dl(r)*dl(φ)*dl(z)=r dr dφ dz。
高中数学第一讲四柱坐标系与球坐标系简介1柱坐标系课件新人教A版选修4-4
将直角坐标化为柱坐标
[例 1] 设点 A 的直角坐标为(1, 3,5),求它的柱坐标. [思路点拨] 由公式求出 ρ,再由 tan θ=xy求 θ.
已知点的直角坐标,确定它的柱坐标关键是确定ρ和 θ,尤其是θ,要注意求出tan θ后,还要根据点所在象限 确定θ的值(θ的范围是[0,2π)).
1.点A的直角坐标为(1,1,1),求它的柱坐标.
四
柱坐标系与球坐标系简介
1.柱坐标系
柱坐标系 (1)定义:建立空间直角坐标系 Oxyz,设 P 是空间任意一点,它在 Oxy 平面上的射影为 Q,用(ρ,θ)(ρ≥0,0≤θ<2π)表示点 Q 在平面 Oxy 上的极坐标,这时点 P 的位置可用有序数组 (ρ,θ,z) (z∈R)表示.这 样,我们建立了空间的点与有序数组(ρ,θ,z)之间的一种对应关系.把 建立上述对应关系的坐标系叫做柱坐标系,有序数组(ρ,θ,z)叫做点 P 的柱坐标,记作 P(ρ,θ,z) ,其中_ρ_≥__0_,_0_≤__θ_<__2_π_,__z_∈__R_.
解:ρ2=x2+y2=12+12=2,∴ρ= 2, 又tan θ=1,x>0,y>0,点在第一象限.
∴θ=π4,
∴点A的柱坐标为
பைடு நூலகம்
2,π4,1.
将点的柱坐标化为直角坐标
[例 2] 已知点 P 的柱坐标为4,π3,8,求它的直角坐标. [思路点拨] 直接利用公式求解.
已知柱坐标,求直角坐标,利用变换公式
x=ρcos θ, y=ρsin θ, z=z
即可.
3.点N的柱坐标为2,π2,3,求它的直角坐标.
x=ρcos θ, 解:由变换公式y=ρsin θ, 得
z=z, x=ρcos θ=2cosπ2=0,y=ρsin θ=2·sinπ2=2, 故点 N 的直角坐标为(0,2,3).
2019版三维方案数学同步人教A版选修4-4 第一讲 四 柱坐标系与球坐标系简介
束
四
柱坐标系与球坐标系简介
首 页
上一页
下一页
末 页
结
束
1.柱坐标系 (1)定义:建立空间直角坐标系 Oxyz.设 P 是空间任意一 点,它在 Oxy 平面上的射影为 Q,用 (ρ, θ)(ρ≥0,0≤ θ< 2π) 表示点 Q 在平面 Oxy 上的极坐标, 这时点 P 的位置可用有序 数组 (ρ,θ,z) (z∈ R)表示,这样,我们建立了空间的点与 有序数组(ρ, θ, z)之间的一种对应关系,把建立上述对应关 系的坐标系叫做柱坐标系,有序数组(ρ,θ,z)叫做点 P 的柱 坐标,记作 P(ρ,θ,z) ,其中
即 ρ2= 12+( 3)2= 4,∴ ρ= 2. y tan θ= = 3,又 x> 0, y> 0. x
π π ∴ θ= ,∴点 A 的柱坐标为2, , 5. 3 3
首 页
上一页
下一页
末 页
结
束
x= ρcos θ, (2)由变换公式y= ρsin θ, z= z π π 得 x= 4cos = 2, y= 4sin = 2 3, z= 8. 3 3 ∴点 P 的直角坐标为(2,2 3, 8).
结
束
柱坐标与直角坐标的互相转化
[例 1] (1)设点 A 的直角坐标为(1, 3,5),求它的柱坐标.
π 的柱坐标为4, ,8,求它的直角坐标. 3
(2)已知点 P
[思路点拨]
直接利用变换公式求解.
首 页
上一页
下一页
末 页
结
束
[ 解]
x= ρcos θ, 2 2 2 y = ρ sin θ ,得 ρ = x + y , (1)由变换公式 z= z,
高中数学同步备课 柱坐标系与球坐标系简介

三、解答题
8.设点M的直角坐标为(1,1, ),求点M的柱坐标与球坐标.
解:由坐标变换公式,可得ρ= = ,
∵tan θ= =1,x>0,y>0,∴θ= .
r= = =2.
由rcos φ=z= (0≤φ≤π),得cos φ= = ,φ= .
所以点M的柱坐标为 ,球坐标为 .
9.已知点M的柱坐标为 ,点N的球坐标为 ,求线段MN的长度.
∴它的球坐标为 .
(2)由变换公式得,
r= = =2.
由z=rcos φ,得cos φ= =- ,∴φ= .
又tan θ= = =-1,x<0,y>0,∴θ= ,
∴它的球坐标为 .
一、选择题
1.在球坐标系中,方程r=2表示空间的( )
A.球B.球面
C.圆D.直线
解析:选B r=2,表示空间的点到原点的距离为2,即表示球心在原点,半径为2的球面.
解:设点的直角坐标为(x,y,z).
(1)∵(r,φ,θ)= ,
∴
∴ 为所求.
(2)∵(r,φ,θ)= ,
∴
∴ 为所求.
4.求下列各点的球坐标.
(1)M(1, ,2);(2)N(-1,1,- ).
解:(1)由变换公式得,
r= = =2 .
由z=rcos φ,得cos φ= = = ,∴φ= ,
又tan θ= = = ,x>0,y>0,∴θ= ,
由坐标变换公式 且
得 且
得 且
结合图形,得θ= ,由cos φ= 得tan φ= .
所以点C1的直角坐标为(1,1,1),柱坐标为 ,球坐标为 ,其中tan φ= ,0≤φ≤π.
∴点N的直角坐标为(0, , ).
圆柱坐标系和球坐标系的区别

圆柱坐标系和球坐标系的区别圆柱坐标系(Cylindrical Coordinate System)和球坐标系(Spherical Coordinate System)是一种常用的数学坐标系统,用于描述三维空间中的点。
它们各自有其独特的特点和应用领域,下面将介绍这两种坐标系的区别。
圆柱坐标系(Cylindrical Coordinate System)圆柱坐标系是一种三维坐标系,其中一个坐标轴用于表示点到原点的直线距离,另外两个坐标轴用于表示点所在平面上的位置。
圆柱坐标系由以下三个坐标组成:•径向坐标(r):表示点到原点的距离。
•极角(θ):表示点到原点的连线与某一固定方向之间的夹角。
•高度(z):表示点在垂直于该平面并与原点相交的直线上的位置。
圆柱坐标系常用于柱状或圆柱体的描述,例如,圆柱坐标系可以用于描述喷管的形状、涡轮机的叶片等。
在工程和物理学领域中,圆柱坐标系的优势在于它们能够简化问题的分析和求解,特别是在涉及到旋转对称性的情况下。
球坐标系(Spherical Coordinate System)球坐标系也是一种三维坐标系,其中一个坐标轴用于表示点到原点的距离,另外两个坐标轴用于表示点所在球面上的位置。
球坐标系由以下三个坐标组成:•径向坐标(r):表示点到原点的距离。
•极角(θ):表示点到原点的连线与某一固定方向之间的夹角。
•方位角(φ):表示点所在的经度。
球坐标系常用于球体或球形物体的描述,例如,天文学中常使用球坐标系来描述星体的位置和运动。
球坐标系在物理学和数学中也被广泛应用,因为它们能够简化球对称问题的表示和解决。
圆柱坐标系和球坐标系的区别圆柱坐标系和球坐标系在表示三维空间中的点时有一些主要的区别:1.表示范围不同:圆柱坐标系中,径向坐标(r)和高度(z)可以取任意实数值,极角(θ)可以取0到360度或0到2π弧度的值。
而球坐标系中,径向坐标(r)通常为非负实数,极角(θ)通常取0到180度或0到π弧度的值,方位角(φ)通常取0到360度或0到2π弧度的值。
柱坐标和球坐标简介

设 C1 的球坐标为(r, φ, θ), 其中 r≥0,0≤φ≤π, 0≤θ<2π, 由 x=rsin φcos θ,y= rsin φ sin θ, z=rcos φ, 得 r= x2+y2+z2= 12+ 22+12=2. 2 π 由 z=rcos φ,∴cos φ= ,φ= 2 4 y π 又 tan θ= =1,∴θ=4, x π π 从而点 C1 的球坐标为(2,4,4)
【思路探究】 可把两点坐标均化为空间直角坐标,再
用空间两点间的距离公式求距离.
【自主解答】 设 P1 的直角坐标为 P1(x1,y1,z1), x1=2 3sin πcos π=3 2, 3 4 2 π π 3 2 则y1=2 3sin sin = , 3 4 2 π z1=2 3cos 3= 3, 3 2 3 2 ∴P1 的直角坐标为( 2 , 2 , 3).
四
柱坐标系与球坐标系简介
课标 解读
1.了解柱坐标系、球坐标系的意 义,能用柱坐标系、球坐标系 刻画简单问题中的点的位置. 2.知道柱坐标、球坐标与空间 直角坐标的互化关系与公式, 并用于解题.
1.柱坐标系
图 1-4-1 如图 1-4-1 所示, 建立空间直角坐标系 Oxyz. 设 P 是空 间 任 意 一 点 . 它 在 Oxy 平 面 上 的 射 影 为 Q , 用 (ρ , θ)(ρ≥0,0≤θ<2π)表示点 Q 在平面 Oxy 上的极坐标, 这时点 P 的位置可用有序数组(ρ,θ,z)(z∈R)表示.
3.空间直角坐标与柱坐标的转化 空间点 P(x,y,z)与柱坐标(ρ,θ,z)之间的变换公式为 x=ρcos θ, y=ρsin θ, z=z . 4.空间直角坐标与球坐标的关系 空间点 P(x,y,z)与球坐标(r,φ,θ)之间的变换公式为
柱坐标系与球坐标系简介

极径、极角,只是比平面极坐标多了一个量,即点在空间中的高度. -15-
四 柱坐标系与球坐标系简介
目标导航
Z Z D 知识梳理 HISHISHULI
重难聚焦
HONGNANJUJIAO
典例透析
IANLITOUXI
题型一 题型二 题型三 题型四 题型五
【变式训练3】 经过若干个固定和流动的地面遥感观测站监测
重难聚焦
HONGNANJUJIAO
典例透析
IANLITOUXI
2.球坐标系 (1)定义:建立空间直角坐标系Oxyz.设P是空间任意一点,连接OP, 记|OP|=r,OP与Oz轴正向所夹的角为φ.设点P在Oxy平面上的射影 为点Q,Ox轴按逆时针方向旋转到OQ时所转过的最小正角为θ.这样 点P的位置就可以用有序数组(r,φ,θ)表示.这样,空间的点与有序数 组(r,φ,θ)之间建立了一种对应关系,把建立上述对应关系的坐标系 叫做球坐标系(或空间极坐标系),有序数组(r,φ,θ)叫做点P的球坐标, 记作P(r,φ,θ),其中r≥0,0≤φ≤π,0≤θ<2π. (2)空间点P的直角坐标(x,y,z)与球坐标(r,φ,θ)之间的变换关系
的极坐标.这时点P的位置可用有序数组(ρ,θ,z)(z∈R)表示.这样,我
们建立了空间的点与有序数组(ρ,θ,z)之间的一种对应关系.把建立
上述对应关系的坐标系叫做柱坐标系,有序数组(ρ,θ,z)叫做点P的柱
坐标,记作P(ρ,θ,z),其中ρ≥0,0≤θ<2π,-∞<z<+∞.
(2)空间点P的直角坐标(x,y,z)与柱坐标(ρ,θ,z)之间的变换公式
3
解:设点 M 的直角坐标为(x,y,z),则由互化公式可得,
球坐标系和柱坐标系
球坐标系和柱坐标系球坐标系和柱坐标系是空间解析几何中常用的坐标系,它们可以用来描述三维空间中的点的位置和方向。
本文将介绍球坐标系和柱坐标系的定义、坐标变换以及其在不同领域的应用。
一、球坐标系球坐标系是一种三维坐标系,用来描述三维空间中的点的位置。
它由径向距离r、极角θ和方位角φ来确定一个点的坐标。
径向距离r表示点到坐标原点的距离,极角θ表示点与正z轴的夹角,方位角φ表示点在x-y平面上投影与正x轴的夹角。
在球坐标系中,一个点的坐标可以表示为(r,θ,φ)。
坐标变换公式如下:```x = r * sinθ * cosφy = r * sinθ * sinφz = r * cosθ```球坐标系常见于物理学、天文学和计算机图形学等领域的问题求解。
物理学中常用球坐标系描述粒子在空间中的位置和动量,能够简化很多问题的求解过程。
在天文学中,球坐标系可以用来描述星体的位置和运动轨迹。
二、柱坐标系柱坐标系是另一种常见的三维坐标系,适用于平面内与柱面有关的问题。
柱坐标系由极径ρ、极角θ和高度z来确定一个点的坐标。
极径ρ表示点到z轴的距离,极角θ表示点在x-y平面上的投影与正x轴的夹角,高度z表示点在z轴上的坐标。
柱坐标系中,一个点的坐标可以表示为(ρ,θ,z)。
坐标变换公式如下:```x = ρ * cosθy = ρ * sinθz = z```柱坐标系常见于物理学、工程学和流体力学等领域的问题求解。
在工程学中,柱坐标系常用于描述圆柱形结构的变形和应力分布,能够更直观地理解和解决与柱面相关的工程问题。
在流体力学中,柱坐标系可以用来描述圆柱形容器中的流体流动规律。
综上所述,球坐标系和柱坐标系是在三维空间中描述点的位置和方向的常用坐标系。
它们各自具有独特的特点和应用场景,在不同领域的问题求解中发挥着重要作用。
熟练掌握球坐标系和柱坐标系的定义和坐标变换公式,对于解决相关问题具有重要意义。
柱坐标系与球坐标系简介课件

z1=6×cosπ3=3. ∴点 M 的直角坐标为323,92,3, 设点 N 的直角坐标为(x2,y2,z2), 则 x2=6×sin23π×cosπ3=323, y2=6sin23π×sinπ3=92, z2=6cos23π=-3. ∴点 N 的直角坐标为323,92,-3, ∴|MN|= x1-x22+y1-y22+z1-z22=6.
2.点的空间坐标的互相转化公式 设空间一点 P 的直角坐标为(x,y,z),柱坐标为(ρ,θ,z),球坐标为(r,φ,θ),则
空间直角坐标(x,y,z)
转换公式
柱坐标 (ρ,θ,z)
x=_ρ_c_o_s_θ__, y=_ρ_s_in__θ__, z=z
球坐标 (r,φ,θ)
x=_r_s_i_n_φ_c_o_s__θ__ y=_r_s_in__φ_s_i_n_θ__ z= rcos φ
∴(- 3,1,3)为所求点的直角坐标.
(2)∵(ρ,θ,z)=
2,π4,5,
x=ρcos θ=
2cosπ4=1,
∴y=ρsin θ= 2sinπ4=1,
z=5,
∴(1,1,5)为所求点的直角坐标.
直角坐标与柱坐标的互化
点(ρ,θ,z)是三维空间坐标中的点的柱坐标,在平面 xOy 中实际为极坐标, 且 ρ≥0,0≤θ<2π,在竖直方向上 z 为任意实数.化点的柱坐标(ρ,θ,z)为直
柱坐标系与球坐标系简介
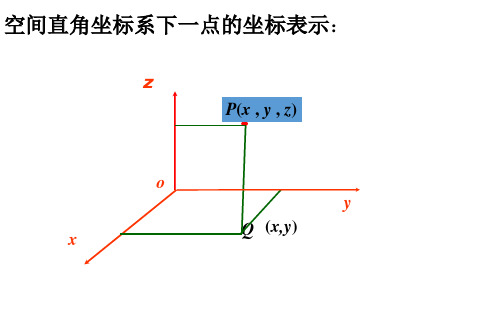
1.空间直角坐标系、柱坐标系与球坐标系 (1)空间直角坐标系:在空间选定一点 O,作两两垂直的三条数轴 Ox, Oy,Oz,使∠xOy=135°,∠yOz=90°,这就是空间直角坐标系.有 序实数组 (x,y,z) 叫点 P 的直角坐标.
(2)柱坐标系:空间直角坐标系 Oxyz 中,设 P 是空间任意一点,它在 Oxy 平面的射影为 Q,用 (ρ,θ) 表示点 Q 在平面 Oxy 上的极坐标,点 P 的位置可用有序数组 (ρ,θ,z) 表示.这就是柱坐标系.有序数组 _(_ρ_,__θ_,__z_) _叫点 P 的柱坐标.其中 ρ≥0,0≤θ<2π,-∞<z<+∞. (3)球坐标系:空间直角坐标系 Oxyz 中,设 P 是空间任意一点,连接 OP,记|OP|=r,OP 与 Oz 轴正向所夹的角为 φ.P 在 Oxy 平面的射影 为 Q,Ox 轴按逆时针方向旋转到 OQ 时所转过的最小正角为 θ.这样 点 P 的位置就可以用有序数组(r,φ,θ)表示.这就是球坐标系.有序数组(r,φ,θ) 叫作点 P 的球坐标.其中 r≥0,0≤φ≤π,0≤θ<2π.
球坐标系和柱坐标系的转换关系
球坐标系和柱坐标系的转换关系一、引言球坐标系和柱坐标系是数学中常用的坐标系之一,它们在物理学、工程学等领域中有着广泛的应用。
球坐标系可以描述三维空间中的点的位置,由径向距离、极角和方位角三个参数确定;而柱坐标系则由径向距离、极角和高度三个参数确定。
本文将详细介绍球坐标系和柱坐标系之间的转换关系。
二、球坐标系和柱坐标系的定义球坐标系是通过一个点到原点的距离、与正半轴的夹角和与x轴的夹角来确定该点的位置。
其中,径向距离r表示点到原点的距离,极角θ表示点与正半轴的夹角,方位角φ表示点与x轴的夹角。
柱坐标系是通过一个点到原点的距离、与正半轴的夹角和该点在z 轴上的投影来确定该点的位置。
其中,径向距离ρ表示点到原点的距离,极角θ表示点与正半轴的夹角,高度z表示点在z轴上的投影。
三、球坐标系到柱坐标系的转换为了将球坐标系转换为柱坐标系,我们可以利用以下公式:1. 将球坐标系中的径向距离r转换为柱坐标系中的径向距离ρ:ρ = r * sin(θ)2. 将球坐标系中的极角θ转换为柱坐标系中的极角θ:θ = θ3. 将球坐标系中的方位角φ转换为柱坐标系中的高度z:z = r * cos(θ)四、柱坐标系到球坐标系的转换同样地,我们也可以将柱坐标系转换为球坐标系,具体的转换关系如下:1. 将柱坐标系中的径向距离ρ转换为球坐标系中的径向距离r:r = √(ρ^2 + z^2)2. 将柱坐标系中的极角θ转换为球坐标系中的极角θ:θ = θ3. 将柱坐标系中的高度z转换为球坐标系中的方位角φ:φ = arctan(z / ρ)五、总结球坐标系和柱坐标系是描述三维空间中点的位置的重要坐标系。
它们之间的转换关系可以通过一些简单的公式来实现。
在实际应用中,我们可以根据需要选择合适的坐标系进行计算和分析。
通过掌握球坐标系和柱坐标系之间的转换关系,我们可以更加灵活地处理三维空间中的问题,提高问题求解的效率和准确性。
六、参考文献[1] 高等数学. 第七版. 同济大学数学系编著. 高等教育出版社.[2] 高等代数与解析几何. 第五版. 同济大学数学系编著. 高等教育出版社.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四、柱坐标系与球坐标系简介
一、导学目标:
知识与技能:借助具体实例了解在柱坐标系、球坐标系中刻画空间中点的位置的方法;
过程与方法: 与空间直角坐标系中刻画点的位置的方法相比较,体会它们的区别。
情感态度与价值观::类比法的建立方法,蕴藏了对立统一的辩证唯物主义思想。
导学重点:柱坐标系、球坐标系概念的理解与应用
导学难点:用柱坐标、球坐标表示空间的点
二、导学策略:
教学方法:探究法、讲授法
教学手段:多媒体辅助教学
三、教学过程:
(一)、课程导入:
建立平面(或空间)直角坐标系后,平面上(或空间)的点可以用直角坐标表示;建立极坐标系后,平面上的点可以用极坐标表示。
类似地,是否建立空间极坐标系,用极坐标表示空间的点呢?
(二)、新知探究:
1
2
1、阅读本节知识,回答以下问题:
1)柱坐标系的定义?如何用柱坐标系描述空间的点? 2)球坐标系的定义?如何用球坐标系描述空间的点?
2、探究结果:
1)、设P 是空间任意一点,在oxy 平面的射影为Q ,
用(ρ,θ)(ρ≥0,0≤θ<2π)表示点在平面oxy 上的 极坐标。
点P 的位置可用有序数组(ρ,θ,Z)表示。
把建立上述对应关系的坐标系叫做柱坐标系。
有序数组(ρ,θ,Z)叫点P 的柱坐标,其中ρ≥0, 0≤θ<2π, -∞<Z <+∞
柱坐标系又称半极坐标系,它是由平面极坐标系及空间直角坐标系中的一部 分建立起来的.
空间点P 的直角坐标(x, y, z)与柱坐标(ρ,θ,Z)之间的变换关系为:
cos sin x y z z ρθρθ=⎧⎪
=⎨⎪=⎩
2)、设P 是空间任意一点,在oxy
3
平面的射影
为Q 。
连接OP ,记| OP |=r ,OP 与OZ 轴正向所 夹的角为φ,P 在oxy 平面的射影为Q 。
Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为 θ,点P 的位置可以用有序数组(r,φ,θ)表示,我们把建立上述对应关系的坐标系叫球坐标系(或空间极坐标系)。
有序数组(r,φ,θ)叫做点P 的球坐标,其中,
0,0,02r ϕπθπ≥≤≤≤< 。
空间点P 的直角坐标(x, y, z)与球坐标(r,φ,θ)之间的变换关系为:
sin cos sin sin cos x r y r z r ϕθϕθϕ=⎧⎪
=⎨⎪=⎩
简单应用:
1、 设点M 的空间的直角坐标方程为(1,1,3),求它的柱坐标
解:∵cos sin x y z z ρθρθ=⎧⎪=⎨⎪=⎩
,ρ
2
=x 2+y 2
=2, ρ
tan 1,4
y x πθθ=
==(注意
到M 在第1象限) ∴点M
4
π
,3)。