第四章 常规及复杂控制技术
合集下载
课件:4.3 常规及复杂控制技术(三)
象某些特征参数,比如临界增益K和临界周期T(频率
ω=2π/T)。
5.PID控制参数的自整定法
被控对象大多用近似一阶惯性加纯滞后环节来表示,
其传递函数为
Gc
(
s
)
Ke 1 T
s
s
对于典型PID控制器
1 D( s ) KP(1 TI s TDs )
有Ziegler-Nichols整定公式
K
P
1.2T Kτ
Δu(k)= KP[2.45e(k)-3.5e(k-1)+1.25e(k-2)] 这样,整个问题便简化为只要整定一个参数KP。 改变KP,观察控制效果,直到满意为止。 该法为实现简易的自整定控制带来方便。
3.优选法
优选法是经验法的一种。 具体作法:根据经验,先把其它参数固定,然后用 0.618法(黄金分割法)对其中某一参数进行优选,待选出 最佳参数后,再换另一个参数进行优选,直到把所有的参 数优选完毕为止。 最后根据T、KP、TI、TD诸参数优选的结果取一组最佳 值即可。
① 给定值的变化频率越高,采样频率就应越高。 ② 被控对象是快速变化的,采样周期应小。 ③ 执行机构的惯性大,采样周期应大。 ④ 控制算法的类型:T太小会使得PID算法的微分积分作 用不明显;控制算法也需要计算时间。 ⑤ 控制的回路数:
n
T Tj
j 1
Tj 指第j回路控制程序执行时间和输入输出时间。
2.按简易工程法整定PID参数
(1)扩充临界比例度法
① 选择一个足够短的采样周期,采样周期为被控对象纯 滞后时间的十分之一以下。
② 用选定的采样周期使系统工作。这时,数字控制器去 掉积分作用和微分作用,只保留比例作用。然后逐渐减小比 例度δ(δ=1/KP),直到系统发生持续等幅振荡。记下使系 统发生振荡的临界比例度δk及系统的临界振荡周期Tk。
ω=2π/T)。
5.PID控制参数的自整定法
被控对象大多用近似一阶惯性加纯滞后环节来表示,
其传递函数为
Gc
(
s
)
Ke 1 T
s
s
对于典型PID控制器
1 D( s ) KP(1 TI s TDs )
有Ziegler-Nichols整定公式
K
P
1.2T Kτ
Δu(k)= KP[2.45e(k)-3.5e(k-1)+1.25e(k-2)] 这样,整个问题便简化为只要整定一个参数KP。 改变KP,观察控制效果,直到满意为止。 该法为实现简易的自整定控制带来方便。
3.优选法
优选法是经验法的一种。 具体作法:根据经验,先把其它参数固定,然后用 0.618法(黄金分割法)对其中某一参数进行优选,待选出 最佳参数后,再换另一个参数进行优选,直到把所有的参 数优选完毕为止。 最后根据T、KP、TI、TD诸参数优选的结果取一组最佳 值即可。
① 给定值的变化频率越高,采样频率就应越高。 ② 被控对象是快速变化的,采样周期应小。 ③ 执行机构的惯性大,采样周期应大。 ④ 控制算法的类型:T太小会使得PID算法的微分积分作 用不明显;控制算法也需要计算时间。 ⑤ 控制的回路数:
n
T Tj
j 1
Tj 指第j回路控制程序执行时间和输入输出时间。
2.按简易工程法整定PID参数
(1)扩充临界比例度法
① 选择一个足够短的采样周期,采样周期为被控对象纯 滞后时间的十分之一以下。
② 用选定的采样周期使系统工作。这时,数字控制器去 掉积分作用和微分作用,只保留比例作用。然后逐渐减小比 例度δ(δ=1/KP),直到系统发生持续等幅振荡。记下使系 统发生振荡的临界比例度δk及系统的临界振荡周期Tk。
第四章-2 常规及复杂控制技术(于海生)
nT t (n 1)T
一阶保持器的数学模型
1 2 1 g h (t ) 1(t ) t (t ) 2(t T ) t (t T ) 1(t 2T ) t (t 2T ) T T T 1 1 2 Ts 2 Ts 1 2Ts 1 2Ts Gh ( s) 2 e 2 e e 2 e s Ts s Ts s Ts
得到
-映射关系:
前向差分法置换公式 把S=σ+jω 代入, 取模的平方有:
令|z|=1,则对应到s平面上是一个圆,有:
即当D(s)的极点位于左半平面以(-1/T,0)为圆心,1/T 为半径的圆内,D(z)才在单位圆内,才稳定。 结论:稳定的系统经前向差分法转换后可能不稳定。
方法3: 后向差分法
推导1:级数展开z=esT, T很小。 得到
通过 z e 转换成脉冲传递函数对应的极点
sT
三种变换法的运用举例(续2)
z1 e( 0.1 j 0.5)T e0.1e j 0.5 0.90480.5, z2 e( 0.1 j 0.5)T e0.1e j 0.5 0.9048 0.5
1 e T (1 Ts) Ts
Ts
2
sin(T / 2) Gh ( j) T 1 (T) T / 2
2
2
Gh ( j) arctgT T
一阶保持器与零阶保持器比较 1、一阶保持器幅频特性的幅值较大,高频分 量也大。 2、一阶保持器相角滞后比零阶保持器大。 3、一阶保持器的结构更复杂。 一阶保持器实际很少使用!!
D(s)
r(t)
e(t) T
e(k)
D(z)
u(k) T
计算机控制技术-常规及复杂控制技术(九)

對於帶純滯後的二階慣性環節組成的系統,其振鈴幅度
RA C2 eT T eT T1 eT T2 C1
lim RA 2
T 0
2.振鈴現象及其消除
(3) 振鈴現象的消除 (a)第一種方法 先找出D(z)中引起振鈴現象的因數(z=-1附近的極點),
然後令其中的z=1,根據終值定理,這樣處理不影響輸出量 的穩態值。
通過適當選擇T和Tτ,可把振鈴幅度抑制在最低限度以內。 有的情況下,系統閉環時間常數Tτ作為控制系統的性能指標被 首先確定了,但仍可通過選擇採樣週期T來抑制振鈴現象。
3.達林演算法的設計步驟
一般步驟: (1)根據系統的性能,確定閉環系統的參數Tτ,給出振鈴 幅度RA的指標; (2)由所確定的振鈴幅度RA與採樣週期T的關係,解出給定 振鈴幅度下對應的採樣週期,如果T有多解,則選擇較大的採 樣週期。 (3)確定純滯後時間τ與採樣週期T之比(τ/T)的最大整數 N; (4)求廣義對象的脈衝傳遞函數G(z)及閉環系統的脈衝傳 遞函數Ф(z); (5)求數字控制器的脈衝傳遞函數D(z)。
2.振鈴現象及其消除
振鈴(Ringing)現象:是指數字控制器的輸出以二分之一 採樣頻率大幅度衰減振盪的現象。
下麵,我們通過一個例子,看看振鈴情況?
【例】含有純滯後為1.46s,慣性時間常數為3.34s的連續
一階滯後對象
G(s)
1
e1.46s
3.34s 1
採樣週期T=1s,經過採樣保持後,其廣義對象的脈衝傳遞
1.數字控制器D(z)的形式
我們容易的得到相應的數字控制器D(z)的形式:
一階慣性純滯後環節:
(1 eT T )(1 eT T1 z 1 )
D(z) K(1 eT T1 ) 1 eT T z 1 (1 eT T )z N1
RA C2 eT T eT T1 eT T2 C1
lim RA 2
T 0
2.振鈴現象及其消除
(3) 振鈴現象的消除 (a)第一種方法 先找出D(z)中引起振鈴現象的因數(z=-1附近的極點),
然後令其中的z=1,根據終值定理,這樣處理不影響輸出量 的穩態值。
通過適當選擇T和Tτ,可把振鈴幅度抑制在最低限度以內。 有的情況下,系統閉環時間常數Tτ作為控制系統的性能指標被 首先確定了,但仍可通過選擇採樣週期T來抑制振鈴現象。
3.達林演算法的設計步驟
一般步驟: (1)根據系統的性能,確定閉環系統的參數Tτ,給出振鈴 幅度RA的指標; (2)由所確定的振鈴幅度RA與採樣週期T的關係,解出給定 振鈴幅度下對應的採樣週期,如果T有多解,則選擇較大的採 樣週期。 (3)確定純滯後時間τ與採樣週期T之比(τ/T)的最大整數 N; (4)求廣義對象的脈衝傳遞函數G(z)及閉環系統的脈衝傳 遞函數Ф(z); (5)求數字控制器的脈衝傳遞函數D(z)。
2.振鈴現象及其消除
振鈴(Ringing)現象:是指數字控制器的輸出以二分之一 採樣頻率大幅度衰減振盪的現象。
下麵,我們通過一個例子,看看振鈴情況?
【例】含有純滯後為1.46s,慣性時間常數為3.34s的連續
一階滯後對象
G(s)
1
e1.46s
3.34s 1
採樣週期T=1s,經過採樣保持後,其廣義對象的脈衝傳遞
1.數字控制器D(z)的形式
我們容易的得到相應的數字控制器D(z)的形式:
一階慣性純滯後環節:
(1 eT T )(1 eT T1 z 1 )
D(z) K(1 eT T1 ) 1 eT T z 1 (1 eT T )z N1
计算机控制技术-常规及复杂控制技术(三)
KI KPT/TI
4.湊試法確定PID參數
1.4 1.2
1 0.8 0.6 0.4 0.2
0 0
1.4 1.2
1 0.8 0.6 0.4 0.2
0 0
100
200
300
50 100 150 200 250
1.4 1.2
1 0.8 0.6 0.4 0.2
0 0
1.5
50 100 150 200 250
n
T Tj
j1
Tj 指第j回路控制程式執行時間和輸入輸出時間。
2.按簡易工程法整定PID參數
(1)擴充臨界比例度法
① 選擇一個足夠短的採樣週期,採樣週期為被控對象純 滯後時間的十分之一以下。
② 用選定的採樣週期使系統工作。這時,數字控制器去 掉積分作用和微分作用,只保留比例作用。然後逐漸減小比 例度δ(δ=1/KP),直到系統發生持續等幅振盪。記下使系 統發生振盪的臨界比例度δk及系統的臨界振盪週期Tk。
用擴充回應曲線法整定T和KP、TI、TD的步驟如下: ① 數字控制器不接入控制系統,讓系統處於手動操作 狀態下,將被調量調節到給定值附近,並使之穩定下來。然 後突然改變給定值,給對象一個階躍輸入信號。
2.按簡易工程法整定PID參數 (2)擴充回應曲線法
② 用記錄儀錶記錄被調量在階躍輸入下的整個變化過程 曲線,此時近似為一個一階慣性加純滯後環節的回應曲線。
4.湊試法確定PID參數
整定步驟: (1)首先只整定比例部分。比例係數由小變大, 觀察相應的系統回應,直到得到反應快、超調小、的 回應曲線,且系統無靜差或靜差已小到允許範圍內。
4.湊試法確定PID參數
0.7 0.6 0.5 0.4 0.3 0.2 0.1
4.湊試法確定PID參數
1.4 1.2
1 0.8 0.6 0.4 0.2
0 0
1.4 1.2
1 0.8 0.6 0.4 0.2
0 0
100
200
300
50 100 150 200 250
1.4 1.2
1 0.8 0.6 0.4 0.2
0 0
1.5
50 100 150 200 250
n
T Tj
j1
Tj 指第j回路控制程式執行時間和輸入輸出時間。
2.按簡易工程法整定PID參數
(1)擴充臨界比例度法
① 選擇一個足夠短的採樣週期,採樣週期為被控對象純 滯後時間的十分之一以下。
② 用選定的採樣週期使系統工作。這時,數字控制器去 掉積分作用和微分作用,只保留比例作用。然後逐漸減小比 例度δ(δ=1/KP),直到系統發生持續等幅振盪。記下使系 統發生振盪的臨界比例度δk及系統的臨界振盪週期Tk。
用擴充回應曲線法整定T和KP、TI、TD的步驟如下: ① 數字控制器不接入控制系統,讓系統處於手動操作 狀態下,將被調量調節到給定值附近,並使之穩定下來。然 後突然改變給定值,給對象一個階躍輸入信號。
2.按簡易工程法整定PID參數 (2)擴充回應曲線法
② 用記錄儀錶記錄被調量在階躍輸入下的整個變化過程 曲線,此時近似為一個一階慣性加純滯後環節的回應曲線。
4.湊試法確定PID參數
整定步驟: (1)首先只整定比例部分。比例係數由小變大, 觀察相應的系統回應,直到得到反應快、超調小、的 回應曲線,且系統無靜差或靜差已小到允許範圍內。
4.湊試法確定PID參數
0.7 0.6 0.5 0.4 0.3 0.2 0.1
计算机控制技术-常规及复杂控制技术(四)
(s)
Z
1
eTs S
GC
(s)
3.求取數字控制器的脈衝傳遞函數D(z)。
Φ(z) D(z)G(z) 1 D(z)G(z)
D(z) 1 (z) G(z) 1 (z)
4.3.1 數字控制器的離散化設計步驟
4.根據D(z)求取控制演算法的遞推計算公式
m
Hale Waihona Puke (z)U(z) E(z)bi z i
1.離散系統的根軌跡
對於離散系統,在z平面中繪製根軌跡的方法與連續系 統在s平面繪製根軌跡的方法完全相同。
在s平面中,s=jω(即虛軸)是穩定邊界,而在z平面中
(即單位圓周)是穩定邊界。 只要注意到這個差別。那麼離散系統的根軌跡設計方法
便和連續系統的情況完全一樣。
4.3.2 根軌跡法 2.根軌跡法的參考設計步驟
r(k)
+ e(k) _
D(z)
u(k)
G(z)
y(k)
假想的控制系統結構圖
(1)設D(z)=k,繪製系統的根軌跡
根據根軌跡的形狀進一步確定閉環系統的零極點分 佈是否能夠滿足性能指標的要求。若能,說明系統採用 比例控制即可;若不能,則轉入下一步。
4.3.2 根軌跡法
2.根軌跡法的參考設計步驟
(2)設
4.3 數字控制器的離散化設計技術
本講課程結束!
《電腦控制技術》
第18講 第4章 常規及複雜控制技術(四)
4.3 數字控制器的離散化設計技術
4.3.0 離散化設計的原因 4.3.1 數字控制器的離散化設計步驟
4.3.2 根軌跡法
4.3.0 離散化設計的原因
連續化設計技術的缺點: 要求相當短的採樣週期!因此只能實現較簡單的控制
课件-第四章--常规及复杂控制技术
4.2 数字PID控制算法
6. 微分先行PID控制算法
问题:给定值的升降给控制系统带来冲击,如超 调量过大,调节阀动作剧烈。
可采用如图的微分先行控制方案,它和微分,而不对 偏差e(t)微分,也就是说对给定值r(t)无微分作用。
4.2 数字PID控制算法
作为防止积分饱和的办法之一,可对计算出 的控制量u(k)进行限幅,同时,把积分作用切除。
3. 梯形积分
4.2 数字PID控制算法
问题:积分计算公式的精度。在PID控制器中, 积分项的作用是消除残差。为了减少残差,应提 高积分项的运算精度。为此,可将矩形积分改为 梯形积分,其计算公式为:
t
k
e(t)dt Te(i)
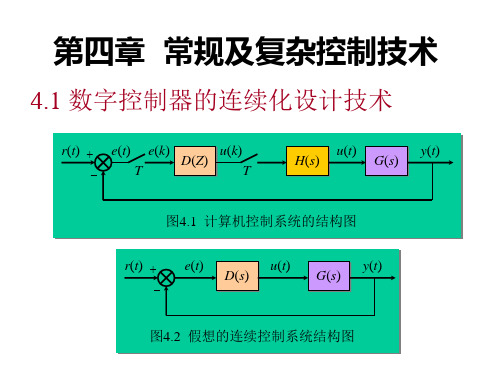
4.1 数字控制器的连续化设计技术
5. 根据差分方程编制相应程序校验
实现微机控制设计好的控制算法投入使用 前,要进行数字仿真,若不合乎要求,应予以 修改,直至满足要求为止。
4.2 数字PID控制算法
4.2.1 PID控制规律及其基本作用 4.2.2 标准数字PID控制算法 4.2.3 改进的数字PID控制器 4.2.4 数字PID调节器参数的整定方法
(4)根据控制度,查表求出T、Kp、Ti和Td值。
(5)按照求得的整定参数,投入系统运行,观察控制效 果,再适当调整参数,直到获得满意的控制效果为止。
4.2 数字PID控制算法
2. 扩充响应曲线法整定PID参数
(1)断开数字调节器,让系统处于手动操作状态。将被 调量调节到给定值附近并稳定后,然后突然改变给定值, 即给对象输入一个阶跃信号。
增量型PID控制算法特点
4.2 数字PID控制算法
u (k) u (k 1 ) u (k)
(1)计算误差对控制量的影响较小,容易 取得较好的控制效果。
第四章常规及复杂控制技术2
实现这一点与对象的传函和闭环传函有关,即与控制器 D(Z)有关。
3、系统的稳定性
一个稳定系统的脉冲传递函数的特征方程的根必须全部在 单位圆中。如果G(Z)中包含单位圆上或单圆外的零点或极点 时,必须通过选择φ (Z)和D(Z)来抵消。
4、典型的输入型号
a、单位阶跃 1 r(t)= 0 b、单位速度 t r(t)= 0 t≥0 t<0
结论:一种典型的最少拍φ (z)只适用于该类型输入。
(2)最少拍控制器的可实现问题
闭环系统可实现性:闭环系统采用反馈进行控制,即用过 去时刻的量去控制下一个时刻的量,它是滞后的。滞后-脉冲 传递函数不出现z+n正幂次项,因此可实现系统的脉冲传递函数 不会出现z+n正幂次项。
典型输入:
r(t)的z变换为: B(z)为不含1-Z-1因子的Z-1多项式。 q=1,输入为单位阶跃输入函数, q=2,输入为单位速度输入函数, q=3,输入为单位加速度输入函数。
(2)根据Z变换的终值定理,求系统的稳态误差,并使其为零 (无静差,即准确性约束条件)。 则有:
要使e(∞ )=0,则必须: 则有:
+b1Z-1U(Z)+b2Z-2U(Z)+…+bnZ-nU(z)
-1 -m U(Z) a0+a1Z +…+amZ 脉冲传函: D(Z)= = E(Z) 1-b1Z-1-b2Z-2-…-bnZ-n
=
a0Zn+a1Zn-1+…+amZn-m Zn-b1Zn-1-b2Zn-2-…-bn
只要脉冲传函的分子Z的次数低于或等于分母的次数,该控 制器就是在物理上可实现的,否则就会在u(k)的表达式出现k+1、 k+2等将来时刻的信号。 Y(Z) = R(Z) ,
第4章 常规及复杂控制技术 教案
图 4.30 锅炉汽包水位控制系统示意图,分析出系统框图,然后采用零阶保持器法进行离
散化处理,最终得到相应的调节量输出序列。
通过分析精馏塔组分控制,引出控制回路耦合问题; 解耦控制的主要目标是通过设
计解耦补偿装置,使各控制器只对各自相应的被控量施加控制作用,从而消除回路间的相
互影响。多变量控制系统解耦的条件是系统的闭环传递函数矩阵 Φ(s)为对角线矩阵。引入
计算机控制技术教案
章节
讲授 主要 内容
重点 难点
第 4 章 共 9 学时
4.1 控制系统的性能指标 4.2 数字控制器的连续化设计技术 4.3 数字控制器的离散化设计技术 4.4 纯滞后控制技术 4.5 串级控制技术(选讲) 4.6 前馈-反馈控制技术(选讲) 4.7 解耦控制技术(选讲) 4.8 模糊控制技术(选讲) 控制系统的性能指标,数字控制器的连续化设计步骤,数字 PID 控制器的设计,数字 PID 控制器的改进,数字 PID 控制器的参数整定 数字控制器的离散化设计步骤,最少拍控制器的设计,最少拍有纹波控制器的设计, 最少拍无纹波控制器的设计 史密斯(Smith)预估控制,达林(Dahlin)算法 串级控制的结构和原理,数字串级控制算法,副回路微分先行串级控制算法 前馈控制的结构和原理,前馈-反馈控制结构,数字前馈-反馈控制算法 解耦控制原理,数字解耦控制算法 模糊控制的数学基础,模糊控制原理,模糊控制器设计 1.将 D(S)离散化为 D(Z) 2.数字 PID 控制器的改进 3.数字 PID 控制器的参数整定 4.最少拍控制的定义 5.最少拍控制器的设计及最少拍控制器的基本形式 6.最少拍有纹波控制器的设计方法、步骤和举例分析 7.最少拍无纹波控制器的设计的必要条件分析 8.史密斯(Smith)预估控制数字化分析 9.达林(Dahlin)算法与振铃现象 10.串级控制的结构和原理 11.前馈控制的结构和原理 12.解耦控制原理 13.模糊控制原理 14.模糊控制器设计
章 常规及复杂控制技术.ppt
ekTs e(k 1)T s
s
s
H (s) Y (s) 1 eTs R(s) s
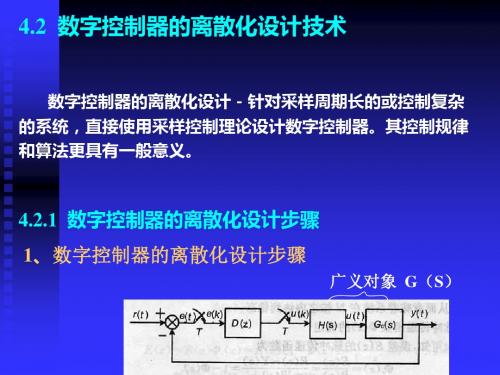
定义广义对象的脉冲传递函数为
G(z)
B(z) A( z )
Z[H
(s)Gc
(s)]
Z [1
eTs s
Gc
(s)]
图 4.14 对应的闭环脉冲传递函数为
(4.2.1)
由上式得
(z) D(z)G(z) 1 D(z)G(z)
D(z) D(s) s 2 z1 T z 1
✓ 前向差分法 ✓ 后向差分法
④ 设计由计算机实现的控制算法
D(z)
U (z) E(z)
b0 1
b1z1 a1z1
bm zm an zn
Z变换的实数位移定理 Z 1[znU (z)] u(t nT )
u(k) a1u(k 1) a2u(k 2) anu(k n) b0e(k) b1e(k 1) bme(k m)
4.3.3 最少拍控制器的设计
最少拍控制,就是要求闭环系统对于某种特定的输 入在最少个采样周期内达到无静差的稳态,且闭环 脉冲传递函数具有以下形式
(z) 1z1 2z2 N zN
式中N是可能情况下的最小正整数。上式表明系统的 脉冲响应在N个采样周期后变为零,系统在N拍之内
达到稳态。
1、Φ (z)的确定
1 (3T )2
T 2T 3T
z3
t
2
只需三拍,输出就能跟踪输入,达到稳态。
3、最少拍控制器的局限性 (1) 最少拍控制器对典型输入的适应性差
如 (z) 按等速输入设计时,有
(z) 2z1 z2 a) r(t) 1(t),Y (z) R(z)(z) 2z1 z2 z3 b) r(t) t,Y (z) R(z)(z) 2Tz 2 3Tz 3 4Tz 4 c) r(t) 1 t 2,Y (z) R(z)(z)
计算机控制技术-常规及复杂控制技术(一)

4.2.1 數字控制器的連續化設計步驟
5.校驗
控制器D(z)設計完並求出控制演算法後,須由數字仿 真檢驗閉環電腦控制系統性能是否符合設計要求。
如果滿足設計要求設計結束,否則應修改設計。
4.2.2 數字PID控制器的設計
根據偏差的比例(P)、積分(I)、微分(D)進行控制(簡稱 PID控制),是控制系統中應用最廣泛的控制規律。
4.2.2 數字PID控制器的設計
4.數字PID控制演算法流程
左圖給出了數字PID 增量型控制演算法 的流程圖。
4.2.2 數字PID控制器的設計
利用增量型控制演算法,也可得出位置型控制演算法:
u(k) u(k -1) Δu(k) u(k -1) q0e(k) q1e(k -1) q2e(k - 2)
數字控制器的連續化設計方法:忽略零階保持器和採 樣器,在S域中按連續系統進行設計,求出連續控制器,然 後通過某種近似,將連續控制器離散化為數字控制器,並 由電腦來實現。
4.2.1 4.2.2 4.2.3 4.2.4
數字控制器的連續化設計步驟 數字PID控制器的設計 數字PID控制器的改進 數字PID控制器的參數整定
《電腦控制技術》
第15講 第4章 常規及複雜控制技術(一)
第4章 常規及複雜控制技術(一)
4.1 控制系統的性能指標 4.2.1 數字控制器的連續化設計步驟
4.2.2 數字PID控制器的設計
4.1 控制系統的性能指標
控制系統的設計問題由三個基本要素組成,它們是模型、 指標和容許控制,三者缺一不可。
u(t) de(t) dt
兩邊求拉氏變換後可推導出控制器為
D(s) U(s) s E(s)
採用前向差分近似可得
计算机控制技术:4.9 常规及复杂控制技术(九)

2.振铃现象及其消除
利用这一算法,当输入为单位阶跃时,则输出为
0.3935z 2 Y (z) R(z)(z) (1 0.6065z1)(1 z1)
0.3935z2 0.6322z3 0.7769z4 0.8674z5 ....
控制量为
U
(z)
Y (z) G(z)
(1
2.6356(1 0.7413z1) 0.733z1)(1 z1)(1 0.6065z1)
下面,我们通过一个例子,看看振铃情况?
【例】含有纯滞后为1.46s,惯性时间常数为3.34s的连续
一阶滞后对象
G(s)
1
e 1.46s
3.34s 1
采样周期T=1s,经过采样保持后,其广义对象的脉冲传递
函数为
G(z)
0.1493z2 (1 0.733z1) 1 0.7413z1
2.振铃现象及其消除
G(z) 1 eT T z 1 (1 eT T )z N 1
1.数字控制器D(z)的形式
被控对象Gc(s)是带有纯滞后的一阶惯性环节
Gc
(s)
1
K T1s
e s
或 被控对象Gc(s)是带有纯滞后的二阶惯性环节
Gc
(s)
(1
K T1s)(1
T2 s)
e s
其中:
τ——纯滞后时间;
T1、T2——时间常数; K ——放大系数。
选取Φ(z),时间常数为Tτ=2s,纯滞后时间为1s,
则
(z)
1
0.3935z 2 0.0.6065z
1
D(z)
1 G(z)
(z) 1 (z)
(1
2.6356(1 0.7431z1) 0.733z1)(1 z1)(1 0.3935z1)
第4章b 常规及复杂控制技术
u ( k ) u ( k 1) u ( k ) u ' ( k ) ① T
1 u ( t ) K P e( t ) TI
'
de(t ) 0 e P e( k ) TI
第4章 常规及复杂控制技术
(2) 抗积分饱和
因长时间出现偏差或偏差较大,计算出的控制量有可 能溢出,或小于零。 所谓溢出就是计算机运算得出的控制量u(k)超出D/A转 换器所能表示的数值范围。 一般执行机构有两个极限位置,如调节阀全开或全关。 设u(k)为FFH时,调节阀全开;反之,u(k)为00H时,调节 阀全关。 如果执行机构已到极限位置,仍然不能消除偏差时, 由于积分作用,尽管计算PID差分方程式所得的运算结果 继续增大或减小,但执行机构已无相应的动作,这就称为 积分饱和。
(2)不完全微分PID控制的 微分作用能缓慢地持续多个采 样周期。由于不完全微分PID 算式中含有一个低通滤波器, 因此抗干扰能力也较强。
D
I P
0 u(k )
t /T
(b)不完全微分PID控制
D
I P
0
图9 PID输出特性的比较
t /T
第4章 常规及复杂控制技术
(2) 微分先行PID控制算式
为了避免给定值的升降给 控制系统带来冲击,如超调 量过大,调节阀动作剧烈, 可采用微分先行PID控制方 案。
它和标准PID控制的不同之处在于,只对被控量y(t)微分,不对 偏差e(t)微分,这样,在改变给定值时,输出不会改变,而被 控量的变化,通常是比较缓和的。这种输出量先行微分控制适 用于给定值频繁升降的系统,可以避免给定值升降时所引起的 系统振荡,明显地改善了系统的动态特性。
u( k ) K p [e ( k ) e ( k 1)] K p T T e ( k ) K p D [ y( k ) TI T TD [ y( k ) y( k - 1)] TI
常规及复杂控制技术
G(S)是被控对象的传递函数
4.1.1 数字控制器的连续化设计步骤
1.设计步骤的第一步:假想的连续控制器D(S)
以前,我们在设计连续系统时,只要给定被控对象的模型,超 调量等性能指标,我们就可以设计了。因此,我们设计的第一步 就是找一种近似的结构,来设计一种假想的连续控制器D(S), 这时候我们的结构图可以简化为:
前向差分法也可由数值微分中得到。
采用前向差分近似可得 上式两边求Z变换后可推导出数字控制器为
(3)后向差分法 利用级数展开还可将Z=esT写成以下形式
双线性变换的优点在于,它把左半S平面转换到单 位圆内。如果使用双线性变换,一个稳定的连续控 制系统在变换之后仍将是稳定的,可是使用前向差 分法,就可能把它变拟PID调节器
PID控制规律为
对应的模拟PID调节器的传递函数为
KP为比例增益,KP与比例带δ成倒数关系即KP=1/δ, TI为积分时间,TD为微分时间, u(t)为控制量,e(t)为偏差。
比例带(度):调节器的输入变化量相对于输入信号范围,占 相应的输出变化量相对于输出信号范围的百分数。
①过渡品质系数Kv≥1 ② 过渡过程时间Ts≤10s ③阶跃响应超调量δ≤25% 设计满足上述要求的数字控制器D(Z)。
,要求
第一步:设计假想的连续校正传递函数D(S)。根据系统的 传递函数和性能指标,利用连续化设计方法不难设计出满 足要求的连续校正传递函数。
这是典型的微分校正
同时,我们可以容易的求得闭环传递函数,可以验证闭环连 续系统满足性能指标的要求。
3.将D(S)离散化为D(Z)
(1)双线性变换法 (2) (3)后向差分法
S与Z之间互 为线性变换
(1)双线性变换法
双线性变换或塔斯廷(Tustin)近似
4.1.1 数字控制器的连续化设计步骤
1.设计步骤的第一步:假想的连续控制器D(S)
以前,我们在设计连续系统时,只要给定被控对象的模型,超 调量等性能指标,我们就可以设计了。因此,我们设计的第一步 就是找一种近似的结构,来设计一种假想的连续控制器D(S), 这时候我们的结构图可以简化为:
前向差分法也可由数值微分中得到。
采用前向差分近似可得 上式两边求Z变换后可推导出数字控制器为
(3)后向差分法 利用级数展开还可将Z=esT写成以下形式
双线性变换的优点在于,它把左半S平面转换到单 位圆内。如果使用双线性变换,一个稳定的连续控 制系统在变换之后仍将是稳定的,可是使用前向差 分法,就可能把它变拟PID调节器
PID控制规律为
对应的模拟PID调节器的传递函数为
KP为比例增益,KP与比例带δ成倒数关系即KP=1/δ, TI为积分时间,TD为微分时间, u(t)为控制量,e(t)为偏差。
比例带(度):调节器的输入变化量相对于输入信号范围,占 相应的输出变化量相对于输出信号范围的百分数。
①过渡品质系数Kv≥1 ② 过渡过程时间Ts≤10s ③阶跃响应超调量δ≤25% 设计满足上述要求的数字控制器D(Z)。
,要求
第一步:设计假想的连续校正传递函数D(S)。根据系统的 传递函数和性能指标,利用连续化设计方法不难设计出满 足要求的连续校正传递函数。
这是典型的微分校正
同时,我们可以容易的求得闭环传递函数,可以验证闭环连 续系统满足性能指标的要求。
3.将D(S)离散化为D(Z)
(1)双线性变换法 (2) (3)后向差分法
S与Z之间互 为线性变换
(1)双线性变换法
双线性变换或塔斯廷(Tustin)近似
计算机控制技术-常规及复杂控制技术(二)
積分飽和勢必使超調量增加,控制品質變壞。 防止積分飽和的措施:可對計算出的控制量u(k)限 幅,同時,把積分作用切除掉。 若以8位D/A為例,則有
當 u(k)<00H 時,取u(k)=00H,採用PD控制; 當 00H≤ u(k)≤ FFH 時,採用PID控制; 當 u(k)> FFH 時,取u(k)=FFH,採用PD控制。
1. 積分項的改進 (3)採用梯形積分提高計算精度
矩形積分:
t
k
edt Te(i)
0
i0
梯形積分:
t
edt
k
e(i) e(i 1) T
0 i0
2
1. 積分項的改進
(4)消除積分不靈敏區
積分不靈敏區:當電腦的運行字長較短,採樣週期T也短,而積分時
間TI又較長時,積分項ΔuI(k)容易出現小於字長的精度而作為“零”處 理,此積分作用消失。
2. 微分項的改進
推導控制演算法:
取拉氏反变换
Df
(
s
)
u( s ) u,( s )
Tf
1 s 1
将其离散化
Tf
du( t ) u( t ) u,( t ) dt
Tf
u( k ) u( k 1) u( k ) u,( k )LL① T
2. 微分項的改進
u,(
t
)
KP
e(
t
)
1 TI
溢出:就是電腦運算得出的控制量u(k)超出D/A轉換 器所能表示的數值範圍。
執行機構一般有2個極限位置,如調節閥全開或全關。 如對於8位D/A,則:
當u(k)為FFH時,調節閥全開; 當u(k)為00H時,調節閥全關。
1. 積分項的改進
當 u(k)<00H 時,取u(k)=00H,採用PD控制; 當 00H≤ u(k)≤ FFH 時,採用PID控制; 當 u(k)> FFH 時,取u(k)=FFH,採用PD控制。
1. 積分項的改進 (3)採用梯形積分提高計算精度
矩形積分:
t
k
edt Te(i)
0
i0
梯形積分:
t
edt
k
e(i) e(i 1) T
0 i0
2
1. 積分項的改進
(4)消除積分不靈敏區
積分不靈敏區:當電腦的運行字長較短,採樣週期T也短,而積分時
間TI又較長時,積分項ΔuI(k)容易出現小於字長的精度而作為“零”處 理,此積分作用消失。
2. 微分項的改進
推導控制演算法:
取拉氏反变换
Df
(
s
)
u( s ) u,( s )
Tf
1 s 1
将其离散化
Tf
du( t ) u( t ) u,( t ) dt
Tf
u( k ) u( k 1) u( k ) u,( k )LL① T
2. 微分項的改進
u,(
t
)
KP
e(
t
)
1 TI
溢出:就是電腦運算得出的控制量u(k)超出D/A轉換 器所能表示的數值範圍。
執行機構一般有2個極限位置,如調節閥全開或全關。 如對於8位D/A,則:
當u(k)為FFH時,調節閥全開; 當u(k)為00H時,調節閥全關。
1. 積分項的改進
第4章 常规及复杂控制技术-3
⑤控制的回路数。
n
T Tj
j1
Tj指第j回路控制程序执行时间和输入输出时间。
8/12/2020
2).按简易工程法整定PID参数
(1)扩充临界比例度法 是对模拟控制器中使用的临界比例度法的扩充,整 定数字控制器参数的步骤如下:
①选择一个足够短的采样周期,具体地说就是选择采 样周期为被控对象纯滞后时间的十分之一以下。
但过大的比例系数会使系统有较大的超调,并 产生振荡,使得稳定性变坏。
8/12/2020
② 积分时间常数TI与系统性能之间的关系
积分环节的主要作用是消除稳态误差。 TI越 小,与误差积分成比例的控制作用就越强,这样就 有可能尽快的消除稳态误差。
同时,由于积分环节的引入,增加了系统开环 传递函数的阶次,这将导致闭环系统振荡倾向的加 强,并使系统的稳定裕度下降。因此, TI取值也不 宜过小。
8/12/2020
(2)其次要考虑以下各方面的因素
①给定值的变化频率:变化频率越高,采样频率就 应越高; ②被控对象的特性:被控对象是快速变化的还是慢 变的;
③执行机构的类型:执行机构的惯性大,采样周期应 大;
8/12/2020
④控制算法的类型:采用太小的T会使得PID算法的微分积 分作用很不明显;控制算法也需要计算时间。
8/12/2020
(2)PID参数的整定方法
1).采样周期的选择
(1) 根据香农采样定理,采样周期上限
T≤π/ωmax ,其中ωmax为被采样信号的上限角频率。
采样周期的下限为计算机执行控制程序和输入输出所 耗费的时间,系统的采样周期只能在Tmin与Tmax之间选 择(在允许范围内,选择较小的T)。
在实际应用中,可能会出现两种情况,一种情况是给 定量频繁地改变,另一种情况是给定量改变不频繁, 但是,却有比较大的干扰。针对这两种情况可分别采 取下图所示的措施。
n
T Tj
j1
Tj指第j回路控制程序执行时间和输入输出时间。
8/12/2020
2).按简易工程法整定PID参数
(1)扩充临界比例度法 是对模拟控制器中使用的临界比例度法的扩充,整 定数字控制器参数的步骤如下:
①选择一个足够短的采样周期,具体地说就是选择采 样周期为被控对象纯滞后时间的十分之一以下。
但过大的比例系数会使系统有较大的超调,并 产生振荡,使得稳定性变坏。
8/12/2020
② 积分时间常数TI与系统性能之间的关系
积分环节的主要作用是消除稳态误差。 TI越 小,与误差积分成比例的控制作用就越强,这样就 有可能尽快的消除稳态误差。
同时,由于积分环节的引入,增加了系统开环 传递函数的阶次,这将导致闭环系统振荡倾向的加 强,并使系统的稳定裕度下降。因此, TI取值也不 宜过小。
8/12/2020
(2)其次要考虑以下各方面的因素
①给定值的变化频率:变化频率越高,采样频率就 应越高; ②被控对象的特性:被控对象是快速变化的还是慢 变的;
③执行机构的类型:执行机构的惯性大,采样周期应 大;
8/12/2020
④控制算法的类型:采用太小的T会使得PID算法的微分积 分作用很不明显;控制算法也需要计算时间。
8/12/2020
(2)PID参数的整定方法
1).采样周期的选择
(1) 根据香农采样定理,采样周期上限
T≤π/ωmax ,其中ωmax为被采样信号的上限角频率。
采样周期的下限为计算机执行控制程序和输入输出所 耗费的时间,系统的采样周期只能在Tmin与Tmax之间选 择(在允许范围内,选择较小的T)。
在实际应用中,可能会出现两种情况,一种情况是给 定量频繁地改变,另一种情况是给定量改变不频繁, 但是,却有比较大的干扰。针对这两种情况可分别采 取下图所示的措施。
计算机控制技术-常规及复杂控制技术(五)

如果G(z)不滿足穩定條件,則需對設計原則作相應 的限制。
3.最少拍控制器的局限性
原因: 在Ф(z) 中,D(z)和G(z)總是成對出現的,但卻不允許
它們的零點、極點互相對消。
這是因為,簡單地利用D(z)的零點去對消G(z)中的不穩 定極點,當系統的參數產生漂移,或辯識的參數有誤差時, 這種零極點對消不可能準確實現,從而將引起閉環系統不穩 定。
零,必須有
Фe(z)=1-Ф(z)=(1-z-1)q F(z)
1.閉環脈衝傳遞函數Ф(z)的確定
即:
Ф(z)=1-Фe(z)=1-(1-z-1)q F(z)
這裏F(z)是關於z-1的待定係數多項式。為了使Ф(z) 能夠實現,F(z)中的首項應取為1,即
F(z)=1+f1z-1+f2z-2+…+fpz-p
可以看出,Ф(z)具有z-1的最高冪次為N=p+q,這表 明系統閉環回應在採樣點的值經N拍可達到穩態。
當p=0時,即F(z)=1時,系統在採樣點的輸出可在最 少拍(Nmin=q)內達到穩態,即為最少拍控制。
1.閉環脈衝傳遞函數Ф(z)的確定
最少拍控制器設計(Nmin=q,p=0)時,選擇Ф(z)為
2 1.5
1 0.5
0 0123456
6
14
5
12
4
10
8 3
6 2
4
1 2
0
0
2
4
6
0
0
2
4
6
可以看出,對於階躍輸入,直到2拍後,輸出才達到穩態,
而在前面單獨設計控制器,只需要1拍,過渡過程時間延長了,
且超調量為100%(在第1拍處)。
對於加速度輸入,輸出產生穩態誤差。
3.最少拍控制器的局限性
原因: 在Ф(z) 中,D(z)和G(z)總是成對出現的,但卻不允許
它們的零點、極點互相對消。
這是因為,簡單地利用D(z)的零點去對消G(z)中的不穩 定極點,當系統的參數產生漂移,或辯識的參數有誤差時, 這種零極點對消不可能準確實現,從而將引起閉環系統不穩 定。
零,必須有
Фe(z)=1-Ф(z)=(1-z-1)q F(z)
1.閉環脈衝傳遞函數Ф(z)的確定
即:
Ф(z)=1-Фe(z)=1-(1-z-1)q F(z)
這裏F(z)是關於z-1的待定係數多項式。為了使Ф(z) 能夠實現,F(z)中的首項應取為1,即
F(z)=1+f1z-1+f2z-2+…+fpz-p
可以看出,Ф(z)具有z-1的最高冪次為N=p+q,這表 明系統閉環回應在採樣點的值經N拍可達到穩態。
當p=0時,即F(z)=1時,系統在採樣點的輸出可在最 少拍(Nmin=q)內達到穩態,即為最少拍控制。
1.閉環脈衝傳遞函數Ф(z)的確定
最少拍控制器設計(Nmin=q,p=0)時,選擇Ф(z)為
2 1.5
1 0.5
0 0123456
6
14
5
12
4
10
8 3
6 2
4
1 2
0
0
2
4
6
0
0
2
4
6
可以看出,對於階躍輸入,直到2拍後,輸出才達到穩態,
而在前面單獨設計控制器,只需要1拍,過渡過程時間延長了,
且超調量為100%(在第1拍處)。
對於加速度輸入,輸出產生穩態誤差。
第4章 常规控制技术
sT sT 2 sT 2
2006
COLLEGE OF ELECTRICAL ENGINEERING, ZHEJIANG UNIVERSITY
4.1
数字控制器的连续化设计技术
(2)前向差分法 sT 利用级数展开可将z=e 写成以下形式:
z esT 1 sT
1 sT (4.1.12)
2006 COLLEGE OF ELECTRICAL ENGINEERING, ZHEJIANG UNIVERSITY
4.1
数字控制器的连续化设计技术
4. 设计由计算机实现的控制算法 设数字控制器D(z)的一般形式为: U ( z ) b0 b1 z 1 bm z m (4.1.24) D( z ) E ( z ) 1 a1 z 1 an z n 式中n≥m,各系数ai,bi为实数,且有n个极点和m个零点。 式(4.1.24)又可写为:
ZHEJIANG UNIVERSITY
4.1
数字控制器的连续化设计技术
3.将D(s)离散化为D(z) 将连续控制器D(s)离散化为数字控制器D(z)的方法 有很多,在这里,我们只介绍常用的双线性变换法、后向 差分法和前向差分法。 (1)双线性变化法 st 由Z变换的定义可知,z=e ,利用级数展开可得: sT sT 1 1 (4.1.5) e 2 2 ze sT sT 上式称为双线性变换 1 1 e 2 2 为了由D(s)求解D(z),由上式可得: 2 z 1 s (4.1.6) T z 1 且有: D ( z ) D ( s ) 2 z 1 s (4.1.7) T z 1 上式就是利用双线性变换法由D(s)求取D(z)的计算公式。
LOGO
计算机控制技术
2006
COLLEGE OF ELECTRICAL ENGINEERING, ZHEJIANG UNIVERSITY
4.1
数字控制器的连续化设计技术
(2)前向差分法 sT 利用级数展开可将z=e 写成以下形式:
z esT 1 sT
1 sT (4.1.12)
2006 COLLEGE OF ELECTRICAL ENGINEERING, ZHEJIANG UNIVERSITY
4.1
数字控制器的连续化设计技术
4. 设计由计算机实现的控制算法 设数字控制器D(z)的一般形式为: U ( z ) b0 b1 z 1 bm z m (4.1.24) D( z ) E ( z ) 1 a1 z 1 an z n 式中n≥m,各系数ai,bi为实数,且有n个极点和m个零点。 式(4.1.24)又可写为:
ZHEJIANG UNIVERSITY
4.1
数字控制器的连续化设计技术
3.将D(s)离散化为D(z) 将连续控制器D(s)离散化为数字控制器D(z)的方法 有很多,在这里,我们只介绍常用的双线性变换法、后向 差分法和前向差分法。 (1)双线性变化法 st 由Z变换的定义可知,z=e ,利用级数展开可得: sT sT 1 1 (4.1.5) e 2 2 ze sT sT 上式称为双线性变换 1 1 e 2 2 为了由D(s)求解D(z),由上式可得: 2 z 1 s (4.1.6) T z 1 且有: D ( z ) D ( s ) 2 z 1 s (4.1.7) T z 1 上式就是利用双线性变换法由D(s)求取D(z)的计算公式。
LOGO
计算机控制技术
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10
5.校验
控制器D(z)设计完并求出控制算法后,须按下图所示的 计算机控制系统检验其闭环特性是否符合设计要求,这一步 可由计算机控制系统的数字仿真计算来验证,如果满足设计 要求设计结束,否则应修改设计。
r(t) + _
e(t) e(k) T
D(z)
u(k) T
u(t)
y(t)
H(s)
G(s)
11
2
4.1.1 数字控制器的连续化设计步骤
1. 设计假想的连续控制器D(s)
r(t) + _
e(t) e(k) T
D(z)
u(k) T
u(t)
y(t)
H(s)
G(s)
结构图可以简化为:
r(t)
+ _
e(t) D(s)
u(t)
G(s)
y(t)
已知G(s)来求D(s)的方法有很多种,比如频率特性法、根轨迹法等。
D(z) D(s) s z1 T
8
(3)后向差分法 (backward difference)
利用级数展开还可将z=esT写成以下形式
z esT
1 e sT
1 1 sT
s z 1 Tz
D(z) D(s) s z1 Tz
9
4.设计由计算机实现的控制算法
数字控制器D(z)的一般形式为下式,其中n≥m,
第四章 常规及复杂控制技术
计算机控制系统的设计,是指在给定系统性能指 标的条件下,设计出控制器的控制规律和相应的数字 控制算法。
①常规控制技术介绍数字控制器的连续化设计技 术和离散化设计技术;
②复杂控制技术介绍纯滞后控制、串级控制、前 馈—反馈控制、解耦控制、模糊控制等技术。
1
4.1 数字控制器的连续化设计技术
(1)数字PID位置型控制算式 (positional arithmetic formula)
(2)数字PID增量型控制算式 (incremental arithmetic formula)
14
(1)数字PID位置型控制算式
u(t)
K
P
e(t)
1 TI
t
e(t)dt
0
TD
de(t)
dt
D(s)
U (s) E(s)
KP
(1
1 TI s
TD s)
其中KP为比例增益,KP与比例度δ成倒数关系即KP=1/δ, TI为积分时间常数,TD为微分时间常数,u(t)为控制量,e(t)为 偏差。
13
2.数字PID控制器
当采样周期相当短时,用求和代替积分、 用后向差分代替微分,使模拟PID离散化变为 差分方程。
根据位置型算式:
u(k )
KP
e(k
)
T TI
k
e(i) TD
4.1.2 数字PID控制器的设计
根据偏差的比例(P)、积分(I)、微分(D)进行 控制(简称PID控制),是控制系统中应用最为广泛 的一种控制规律。
优点:① 原理简单 ② 通用性强
12
1.模拟PID
PID控制规律为
1t
de(t)
u(t)
K
P
e(t)
TI
0 e(t)dt TD
dt
对应的模拟PID调节器的传递函数为
3
2.选择采样周期T
香农采样定理给出了从采样信号恢复连续信号的最低采样频率。
在计算机控制系统中,完成信号恢复功能一般由零阶保持器H(s) 来实现。零阶保持器的传递函数为 H (s) 1 esT
s
其频率特性为 H ( j ) 1 e jT 2e jT 2 (e jT2 e jT2 )
j
2 j
各系数ai, bi为实数,且有n个极点和m
D(z)
U (z) E(z)
b0 b1z 1 bm z m 1 a1z 1 an z n
U (z) (a1z1 a2z2 an zn )U (z)
(b0 b1z1 bm zmu(k 2) anu(k n) b0e(k) b1e(k 1) bme(k m) D(z) 的控制算法
将模拟PID控制规律变换成差分方程,可做如下近似:
t
k
e(t)dt Te(i)
0
i0
de(t) e(k) e(k 1)
dt
T
Tk
e(k) e(k 1)
u(k
)
KP
e(k )
TI
e(i) TD
i0
T
式中u(k) 为执行机构的位置,如阀门开度,因此称 为位置型控制算式。
15
(2)数字PID增量型控制算式
T
sin T
2
T
e j T 2
T
sin T
2
T
T
2
2
2
从上式可以看出,零阶保持器将对控制信号产生附加相移
(滞后)。对于小的采样周期,可把零阶保持器H(s)近似为:
1 esT H (s)
11 sT (sT )2
2
s
s
T (1 s T
sT
) Te 2
2
4
H (s) 1 esT
1 1 sT
5
3.将D(s)离散化为D(z) (1)双线性变换法(bilinear transformation) (2)前向差分法(forward difference) (3)后向差分法(backward difference)
6
(1)双线性变换法 (bilinear transformation) 塔斯廷(Tustin )近似法
Numerical Controller Continuous Design Technique
设计方法:数字控制器的连续化设计是忽略控制回路中所 有的零阶保持器和采样器,在S域中按连续系统进行初步设计, 求出连续控制器,然后通过某种近似,将连续控制器离散化为 数字控制器,并由计算机来实现。
4.1.1 数字控制器的连续化设计步骤 4.1.2 数字PID控制器的设计 4.1.3 数字PID控制器的改进 4.1.4 数字PID控制器的参数整定
(sT )2 2
T (1 s T
)
sT
Te 2
s
s
2
假定相位裕量(phase margin)可减少5°~15°,则采
其中ωC是连续控制系统的剪切频率(cut frequency)。
按上式的经验法选择的采样周期相当短。因此,采用连续化 设计方法,用数字控制器去近似连续控制器,要有相当短的采 样周期。
s与z之间互为线性变换
z esT
sT
e2
sT
e2
1 sT
1
2 sT
2
1 sT
1
2 sT
2
s 2 z 1 T z 1
D(z) D(s) s 2 z1 T z1
7
(2)前向差分法 (forward difference)
利用级数展开可将z=esT
z=esT=1+sT+…≈1+sT
s z 1 T
5.校验
控制器D(z)设计完并求出控制算法后,须按下图所示的 计算机控制系统检验其闭环特性是否符合设计要求,这一步 可由计算机控制系统的数字仿真计算来验证,如果满足设计 要求设计结束,否则应修改设计。
r(t) + _
e(t) e(k) T
D(z)
u(k) T
u(t)
y(t)
H(s)
G(s)
11
2
4.1.1 数字控制器的连续化设计步骤
1. 设计假想的连续控制器D(s)
r(t) + _
e(t) e(k) T
D(z)
u(k) T
u(t)
y(t)
H(s)
G(s)
结构图可以简化为:
r(t)
+ _
e(t) D(s)
u(t)
G(s)
y(t)
已知G(s)来求D(s)的方法有很多种,比如频率特性法、根轨迹法等。
D(z) D(s) s z1 T
8
(3)后向差分法 (backward difference)
利用级数展开还可将z=esT写成以下形式
z esT
1 e sT
1 1 sT
s z 1 Tz
D(z) D(s) s z1 Tz
9
4.设计由计算机实现的控制算法
数字控制器D(z)的一般形式为下式,其中n≥m,
第四章 常规及复杂控制技术
计算机控制系统的设计,是指在给定系统性能指 标的条件下,设计出控制器的控制规律和相应的数字 控制算法。
①常规控制技术介绍数字控制器的连续化设计技 术和离散化设计技术;
②复杂控制技术介绍纯滞后控制、串级控制、前 馈—反馈控制、解耦控制、模糊控制等技术。
1
4.1 数字控制器的连续化设计技术
(1)数字PID位置型控制算式 (positional arithmetic formula)
(2)数字PID增量型控制算式 (incremental arithmetic formula)
14
(1)数字PID位置型控制算式
u(t)
K
P
e(t)
1 TI
t
e(t)dt
0
TD
de(t)
dt
D(s)
U (s) E(s)
KP
(1
1 TI s
TD s)
其中KP为比例增益,KP与比例度δ成倒数关系即KP=1/δ, TI为积分时间常数,TD为微分时间常数,u(t)为控制量,e(t)为 偏差。
13
2.数字PID控制器
当采样周期相当短时,用求和代替积分、 用后向差分代替微分,使模拟PID离散化变为 差分方程。
根据位置型算式:
u(k )
KP
e(k
)
T TI
k
e(i) TD
4.1.2 数字PID控制器的设计
根据偏差的比例(P)、积分(I)、微分(D)进行 控制(简称PID控制),是控制系统中应用最为广泛 的一种控制规律。
优点:① 原理简单 ② 通用性强
12
1.模拟PID
PID控制规律为
1t
de(t)
u(t)
K
P
e(t)
TI
0 e(t)dt TD
dt
对应的模拟PID调节器的传递函数为
3
2.选择采样周期T
香农采样定理给出了从采样信号恢复连续信号的最低采样频率。
在计算机控制系统中,完成信号恢复功能一般由零阶保持器H(s) 来实现。零阶保持器的传递函数为 H (s) 1 esT
s
其频率特性为 H ( j ) 1 e jT 2e jT 2 (e jT2 e jT2 )
j
2 j
各系数ai, bi为实数,且有n个极点和m
D(z)
U (z) E(z)
b0 b1z 1 bm z m 1 a1z 1 an z n
U (z) (a1z1 a2z2 an zn )U (z)
(b0 b1z1 bm zmu(k 2) anu(k n) b0e(k) b1e(k 1) bme(k m) D(z) 的控制算法
将模拟PID控制规律变换成差分方程,可做如下近似:
t
k
e(t)dt Te(i)
0
i0
de(t) e(k) e(k 1)
dt
T
Tk
e(k) e(k 1)
u(k
)
KP
e(k )
TI
e(i) TD
i0
T
式中u(k) 为执行机构的位置,如阀门开度,因此称 为位置型控制算式。
15
(2)数字PID增量型控制算式
T
sin T
2
T
e j T 2
T
sin T
2
T
T
2
2
2
从上式可以看出,零阶保持器将对控制信号产生附加相移
(滞后)。对于小的采样周期,可把零阶保持器H(s)近似为:
1 esT H (s)
11 sT (sT )2
2
s
s
T (1 s T
sT
) Te 2
2
4
H (s) 1 esT
1 1 sT
5
3.将D(s)离散化为D(z) (1)双线性变换法(bilinear transformation) (2)前向差分法(forward difference) (3)后向差分法(backward difference)
6
(1)双线性变换法 (bilinear transformation) 塔斯廷(Tustin )近似法
Numerical Controller Continuous Design Technique
设计方法:数字控制器的连续化设计是忽略控制回路中所 有的零阶保持器和采样器,在S域中按连续系统进行初步设计, 求出连续控制器,然后通过某种近似,将连续控制器离散化为 数字控制器,并由计算机来实现。
4.1.1 数字控制器的连续化设计步骤 4.1.2 数字PID控制器的设计 4.1.3 数字PID控制器的改进 4.1.4 数字PID控制器的参数整定
(sT )2 2
T (1 s T
)
sT
Te 2
s
s
2
假定相位裕量(phase margin)可减少5°~15°,则采
其中ωC是连续控制系统的剪切频率(cut frequency)。
按上式的经验法选择的采样周期相当短。因此,采用连续化 设计方法,用数字控制器去近似连续控制器,要有相当短的采 样周期。
s与z之间互为线性变换
z esT
sT
e2
sT
e2
1 sT
1
2 sT
2
1 sT
1
2 sT
2
s 2 z 1 T z 1
D(z) D(s) s 2 z1 T z1
7
(2)前向差分法 (forward difference)
利用级数展开可将z=esT
z=esT=1+sT+…≈1+sT
s z 1 T