基本的图算法
计算机图形学第3章 基本图形生成算法

例题:有点P0(4,3);P1(6,5);P2(10,
6 );P3(12,4),用以上4点构造2次B样条曲线。
2.1.7 非均匀有理B样条
非均匀有理B样条NURBS(Non Uniform Rational BSpline);
3.2.2
Bresenham画圆法
该算法是最有效的算法之一。
不失一般性,假设圆心(xc,yc) ,圆上的点(x′,y′),则:
x' x xc
y ' y yc
圆心为原点,半径为R的位于第一象限1/8圆弧的画法,即(0, R)~( R , R )。
2 2
yi ), 思想:每一步都选择一个距离理想圆周最近的点P( xi , 使其误差项最小。
画其他曲线。
3.3
自由曲线的生成
正弦函数曲线
指数函数曲线
多项式函数曲线
自 由 曲 线
概率分布曲线及样条函数曲线
3.3.1 曲线的基本理论
基本概念
2.1.4
规则曲线:可用数学方程式表示出来的,如抛物 线等。
自由曲线:很难用一个数学方程式描述的,如高
速公路等。可通过曲线拟合(插值、逼近)的方法来
例题: 利用Bresenham算法生成P (0,0)到Q(6,5)的直 线所经过的像素点。要求先 列出计算式算出各点的坐标 值,然后在方格中标出各点。
(1,1)
3.1.5 双步画线法 原理
模式1:当右像素位于右下角时,中间像素位于底线 模式4:当右边像素位右上角时,中间像素位于中线 模式2和模式3:当右像素位于中线时,中间像素可能位于底线 上,也可能位于中线上,分别对应于模式2和模式3,需进一步 判断。 当0≤k≤1/2时,模式4不可能出现,当1/2≤k≤1时,模式1不 可能出现。
计算机的基本算法
计算机的基本算法在计算机科学领域,算法是一组用于解决特定问题的指令和规则。
它们是计算机系统实现各种功能和任务的基础。
本文介绍和探讨了计算机的基本算法,包括排序算法、搜索算法和图算法。
一、排序算法排序算法是计算机科学中最基本和常用的算法之一。
它们的作用是将一组无序的数据按照升序或降序进行排列。
以下介绍几种常见的排序算法:1. 冒泡排序冒泡排序是一种通过多次比较和交换来实现排序的算法。
它的基本思想是从第一个元素开始,依次比较相邻的两个元素,如果它们的顺序不对则进行交换,直到达到整体有序的状态。
2. 插入排序插入排序是一种在已排序序列中插入新元素的排序算法。
它的基本思想是将待排序的数据分为已排序和未排序两部分,每次从未排序中取出一个元素,在已排序序列中找到合适的位置插入,保证每次插入后已排序序列仍然有序。
3. 快速排序快速排序是一种高效的排序算法,它采用分治的思想。
它的基本思想是选择一个基准元素,通过一趟排序将原数据划分为两部分,左边部分的元素都小于基准元素,右边部分的元素都大于基准元素,然后递归地对左右两部分进行排序。
二、搜索算法搜索算法是在给定数据集中查找特定元素或信息的算法。
以下介绍几种常见的搜索算法:1. 顺序搜索顺序搜索是一种逐个遍历数据元素进行匹配的搜索算法。
它的基本思想是从数据的第一个元素开始,依次和目标元素进行比较,直到找到匹配的元素或者遍历完整个数据集。
2. 二分搜索二分搜索是一种在有序数据集中查找目标元素的算法。
它的基本思想是将数据集分为两部分,判断目标元素可能在哪一部分,然后递归地在相应的部分中进行搜索,缩小搜索范围直至找到目标元素或确定不存在。
三、图算法图算法是用于解决图结构相关问题的算法。
图是由节点和边组成的数据结构,常用于表示多个对象之间的关系。
以下介绍几种常见的图算法:1. 广度优先搜索广度优先搜索是一种遍历图的算法,它从指定的起始节点开始,逐层扩展搜索到的节点,直到没有未搜索的节点为止。
无向图的基本算法
marked = new boolean[graph.V()]; id = new int[graph.V()]; for (int i =0; i < graph.V(); i++) {
View Code 试验一个算法最简单的办法是找一个简单的例子来实现。
深度优先路径查询 有了这个基础,我们可以实现基于深度优先的路径查询,要实现路径查询,我们必须定义一个变量来记录所探索到的路径。所以在上面 的基础上定义一个edgesTo变量来后向记录所有到s的顶点的记录,和仅记录从当前节点到起始节点不同,我们记录图中的每一个节点到开 始节点的路径。为了完成这一日任务,通过设置edgesTo[w]=v,我们记录从v到w的边,换句话说,v-w是最后一条从s到达w的边。 edgesTo[]其实是一个指向其父节点的树。
}
View Code
广度优先算法的搜索步骤如下:
广度优先搜索首先是在距离起始点为1的范围内的所有邻接点中查找有没有到达目标结点的对象,如果没有,继续前进在距离起始点为
2的范围内查找,依次向前推进。
连通分量 使用深度优先遍历计算图的所有连通分量。
package Graph; public class CC {
public int GetVerticals () {
return verticals; }
public int GetEdges() {
return edges; }
public void AddEdge(int verticalStart, int verticalEnd) {
图基本算法拓扑排序(基于dfs)
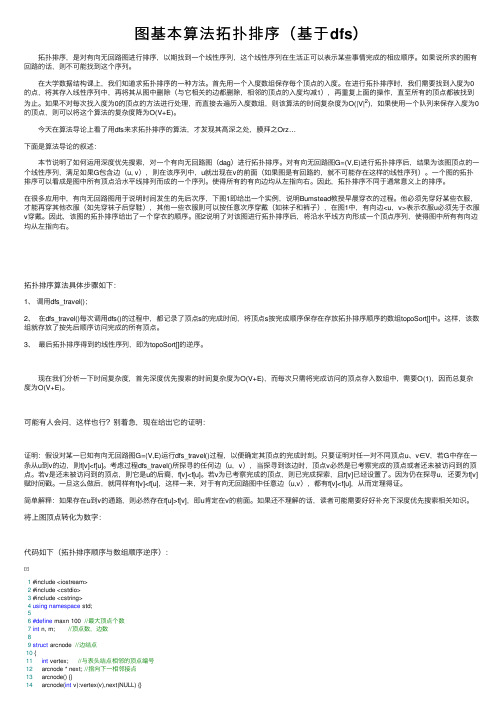
图基本算法拓扑排序(基于dfs) 拓扑排序,是对有向⽆回路图进⾏排序,以期找到⼀个线性序列,这个线性序列在⽣活正可以表⽰某些事情完成的相应顺序。
如果说所求的图有回路的话,则不可能找到这个序列。
在⼤学数据结构课上,我们知道求拓扑排序的⼀种⽅法。
⾸先⽤⼀个⼊度数组保存每个顶点的⼊度。
在进⾏拓扑排序时,我们需要找到⼊度为0的点,将其存⼊线性序列中,再将其从图中删除(与它相关的边都删除,相邻的顶点的⼊度均减1),再重复上⾯的操作,直⾄所有的顶点都被找到为⽌。
如果不对每次找⼊度为0的顶点的⽅法进⾏处理,⽽直接去遍历⼊度数组,则该算法的时间复杂度为O(|V|2),如果使⽤⼀个队列来保存⼊度为0的顶点,则可以将这个算法的复杂度降为O(V+E)。
今天在算法导论上看了⽤dfs来求拓扑排序的算法,才发现其⾼深之处,膜拜之Orz…下⾯是算法导论的叙述: 本节说明了如何运⽤深度优先搜索,对⼀个有向⽆回路图(dag)进⾏拓扑排序。
对有向⽆回路图G=(V,E)进⾏拓扑排序后,结果为该图顶点的⼀个线性序列,满⾜如果G包含边(u, v),则在该序列中,u就出现在v的前⾯(如果图是有回路的,就不可能存在这样的线性序列)。
⼀个图的拓扑排序可以看成是图中所有顶点沿⽔平线排列⽽成的⼀个序列。
使得所有的有向边均从左指向右。
因此,拓扑排序不同于通常意义上的排序。
在很多应⽤中,有向⽆回路图⽤于说明时间发⽣的先后次序,下图1即给出⼀个实例,说明Bumstead教授早晨穿⾐的过程。
他必须先穿好某些⾐服,才能再穿其他⾐服(如先穿袜⼦后穿鞋),其他⼀些⾐服则可以按任意次序穿戴(如袜⼦和裤⼦),在图1中,有向边<u,v>表⽰⾐服u必须先于⾐服v穿戴。
因此,该图的拓扑排序给出了⼀个穿⾐的顺序。
图2说明了对该图进⾏拓扑排序后,将沿⽔平线⽅向形成⼀个顶点序列,使得图中所有有向边均从左指向右。
拓扑排序算法具体步骤如下:1、调⽤dfs_travel();2、在dfs_travel()每次调⽤dfs()的过程中,都记录了顶点s的完成时间,将顶点s按完成顺序保存在存放拓扑排序顺序的数组topoSort[]中。
图论的基础概念和算法

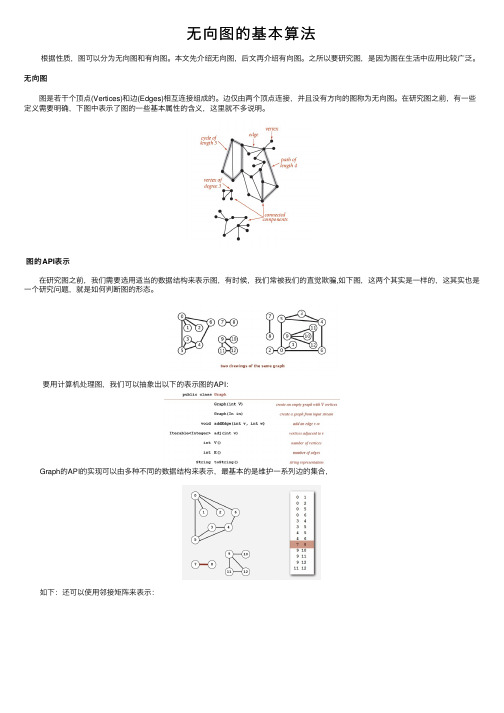
图论的基础概念和算法图论是数学的一个分支,研究的对象是图。
图是由一组互不相连的节点(顶点)和连接这些节点的边(边)组成的数学结构。
图论的基础概念包括顶点、边、路径、环、度数等。
本文将介绍图论的基础概念以及常用的图算法。
一、基础概念1. 图的定义和表示图由顶点集合和边集合组成。
顶点集合用V表示,边集合用E表示。
图可以用邻接矩阵或邻接表来表示。
邻接矩阵是一个二维数组,用来表示图中顶点之间的连接关系。
邻接表是一个链表数组,用来表示每个顶点相邻顶点的列表。
2. 顶点和边顶点是图的基本组成单位,用来表示图中的一个节点。
边是连接两个顶点的线段,用来表示两个顶点之间的关系。
3. 路径和环路径是由一系列相邻顶点连接而成的顶点序列。
路径的长度是指路径上经过的边的数目。
环是起点和终点相同的路径。
4. 度数顶点的度数是指与其相邻的边的数目。
入度是指指向该顶点的边的数目,出度是指由该顶点指向其他顶点的边的数目。
图中顶点的度数可以用来判断顶点的重要性。
二、常用算法1. 广度优先搜索(BFS)广度优先搜索是一种用来遍历和搜索图的算法。
从一个起始顶点开始,逐层扩展,先访问距离起始顶点最近的顶点,然后访问它们的相邻顶点,并逐渐向外扩展。
广度优先搜索可以用来计算两个顶点之间的最短路径。
2. 深度优先搜索(DFS)深度优先搜索是另一种常用的图遍历算法。
从一个起始顶点开始,沿着一条路径尽可能深入地访问图,直到不能再继续深入为止,然后回溯到上一个顶点,继续探索其他路径。
深度优先搜索可以用来计算连通分量、拓扑排序和寻找环等。
3. 最小生成树最小生成树是指图中通过连接所有顶点的子图,并且该子图的边权重之和最小。
常用的最小生成树算法包括Prim算法和Kruskal算法。
Prim算法从一个顶点开始,逐步扩展最小生成树的边,直到包含所有顶点为止。
Kruskal算法则是从边的权重最小的边开始,逐步增加边到最小生成树中,直到包含所有顶点为止。
4. 最短路径算法最短路径算法用来计算两个顶点之间的最短路径。
计算机图形学_基本算法
应不同的设备。
12
返回
2
Ø曲线也可由直线段逼近生成 Ø解决的问题:给定直线两端点P0(x0,y0)
和P1(x1,y1),画出该直线。 主要步骤可以表示如下:
13
初值
偏差判别
移动绘图 偏差计算
终点 判断
N
Y 结束
图2-2 一般线段绘制过程的主要步骤示意图
• 偏差判别:根据当前绘图点位置与理想位置的偏差情况,确定
在不考虑线宽时,一维图形的扫描转 换主要是确定一维的像素序列,二维图 形的扫描转换是确定平面区域所对应的 像素集(称为区域填充)。
5
Ø 一般微机系统板上都配有图形显示缓冲区,
为了快速、及时地控制图形的输出,系统在基
本内存中开辟了从
A0000H ~ CFFFFH的256K字节
甚至到FFFFFH的512K字节
29
返回
因递推公式: Xi+1=Xi+1 yi+1 = kxi+1+b= k1xi+b+k∆x= yi+k∆x
所以:当 ∆x =1; yi+1 = yi+k。 即当x每递增1,y递增k(即直线斜率)
y
yi+1
计算机基本算法

计算机基本算法简介:计算机基本算法是计算机科学中非常重要的一部分。
它涵盖了各种计算问题的解决方案,通过运算和逻辑推理来实现。
基本算法的设计和优化可以提高计算机程序的性能,并解决各种现实生活中的问题。
本文将介绍几种常见的计算机基本算法,包括排序算法、查找算法和图算法。
一、排序算法排序是计算机科学中最常见的问题之一,也是很多其他算法的基础。
以下是几种常见的排序算法:1. 冒泡排序冒泡排序是一种简单但效率较低的排序算法。
它通过多次迭代,每次比较相邻的两个元素并交换位置,将较大的元素逐步移动到数组的末尾,直到整个数组有序。
2. 快速排序快速排序是一种高效的排序算法。
它采用分治策略,将问题分解为子问题并递归地解决。
快速排序的关键是选择一个基准元素,将数组分为比基准元素小和大的两部分,并对这两部分分别进行排序。
3. 归并排序归并排序是一种稳定的排序算法。
它使用分治策略将问题分解为子问题,并将子问题的解合并起来。
归并排序的关键是将两个已排序的子数组合并为一个有序的数组。
二、查找算法查找是另一个常见的计算机问题,它涉及在给定数据集中寻找特定元素的过程。
以下是几种常见的查找算法:1. 顺序查找顺序查找是最简单的查找算法。
它从数据集的第一个元素开始逐一比较,直到找到目标元素或遍历完整个数据集。
2. 二分查找二分查找是一种高效的查找算法,但要求数据集必须有序。
它通过将数据集分成两部分,并根据目标元素与中间元素的大小关系确定目标元素在哪一部分,然后递归地在相应的部分查找。
3. 哈希查找哈希查找利用哈希函数将目标元素映射到一个数组中的索引,并在该索引处查找目标元素。
哈希查找的优势在于查找速度快,但要求数据集必须事先建立好哈希表。
三、图算法图算法用于解决与图相关的问题,包括最短路径、最小生成树等。
以下是几种常见的图算法:1. 深度优先搜索(DFS)深度优先搜索是一种用于图遍历的算法。
它从图的一个顶点开始,沿着路径一直向下搜索,直到无法继续为止,然后返回上一个顶点,继续搜索其他路径,直到遍历完整个图。
数据结构的常用算法

数据结构的常用算法一、排序算法排序算法是数据结构中最基本、最常用的算法之一。
常见的排序算法有冒泡排序、选择排序、插入排序、快速排序、归并排序等。
1. 冒泡排序冒泡排序是一种简单的排序算法,它重复地比较相邻的两个元素,如果它们的顺序错误就将它们交换过来。
通过多次的比较和交换,最大(或最小)的元素会逐渐“浮”到数列的顶端,从而实现排序。
2. 选择排序选择排序是一种简单直观的排序算法,它每次从待排序的数据中选择最小(或最大)的元素,放到已排序序列的末尾,直到全部元素排序完毕。
3. 插入排序插入排序是一种简单直观的排序算法,它将待排序的数据分为已排序区和未排序区,每次从未排序区中取出一个元素,插入到已排序区的合适位置,直到全部元素排序完毕。
4. 快速排序快速排序是一种常用的排序算法,它采用分治的思想,通过一趟排序将待排序的数据分割成独立的两部分,其中一部分的所有数据都比另一部分小,然后再按此方法对这两部分数据进行快速排序,递归地进行,最终实现整个序列有序。
5. 归并排序归并排序是一种稳定的排序算法,它采用分治的思想,将待排序的数据分成若干个子序列,分别进行排序,然后将排好序的子序列合并成更大的有序序列,直到最终整个序列有序。
二、查找算法查找算法是在数据结构中根据给定的某个值,在数据集合中找出目标元素的算法。
常见的查找算法有线性查找、二分查找、哈希查找等。
1. 线性查找线性查找是一种简单直观的查找算法,它从数据集合的第一个元素开始,依次比较每个元素,直到找到目标元素或遍历完整个数据集合。
2. 二分查找二分查找是一种高效的查找算法,它要求数据集合必须是有序的。
通过不断地将数据集合分成两半,将目标元素与中间元素比较,从而缩小查找范围,最终找到目标元素或确定目标元素不存在。
3. 哈希查找哈希查找是一种基于哈希表的查找算法,它通过利用哈希函数将目标元素映射到哈希表中的某个位置,从而快速地找到目标元素。
三、图算法图算法是解决图结构中相关问题的算法。
第3章 图形的基本算法

dy s t 2 ( x i 1 1) 2 y i 1 1 dx
dx(s t ) 2( xi 1 dy y i 1 dx) 2dy dx
因dx>0,所以我们可以以dx(s-t) 的正负作 为选择点的依据。若令其为di,则
d i 2( xi 1 dy y i 1 dx) 2dy dx
若s<t,则Si较靠近理论直线,应选Si,y 不变; 若s>t,则Ti较靠近理论直线,应选Ti,y 增1。 现在需要一个判别式,来判断每一步是选 Ti还是选Si。下面导出Bresenham 算法的 判别式。
判别式的导出
设一直线段由(x1,y1)至(x2,y2),(其中 y2>y1,x2>x1)则直线方程可表示为
怎样选择直线的最佳光栅位置(象素点), 是Bresenham 算法追求的目标。为此,算 法根据直线的斜率在计长方向(x或y)上, 每次都递增一个单位步长即一个象素单位, 另一个方向的增量为0或1。这种算法的巧 妙之处是只需检查判别式的符号即可,而 且计算量很小,只进行整型数计算,不必 做舍入操作。
直线的近似表示
第三章 图形的基本算法
本章内容
3.1 图形的表示 3.2 图形模式与坐标系 3.3 直线的扫描转换 3.4 圆的生成算法 3.5 多边形的填充
3.1 图形的表示
计算机图形学是一门复杂而又多样化的技 术。要想了解这项技术必须把它分成几个 易于操作的部分。图形是计算机图形学的 关键概念,处理图形我们应考虑以下问题: 1. 如何在计算机中表示图形? 2. 如何准备图形的数据? 3. 如何显示准备好的图形? 4. 如何实现人与图形的交互?
这里,图形是一个广义的概念,凡是可 以在图形设备上输出的点、线、文本等 的集合都可以称为是图形。
图论算法介绍
if (a[i,k]=1)and (a[k,j]=1) then a[i,j]=1 (a[i,j]=1表示i可达j,a[i,j]=0表示i不可达j)。
var
link,longlink:array[1..20,1..20] of boolean;{ 无向图和无向图的传递闭包。其
中
l o n g l i n k[i,
例如:公路交通图,边以距离w为权。
例
2
2
1
3
1
3
有向完全图 例
245
无向完全图 5
1
例 1
3
6
图与子图
57
32
46
G2
顶点5的度:3 顶点2的度:4
3
6
例 245
1
3
6
G1
顶点2入度:1 出度:3 顶点4入度:1 出度:0
例
路径:1,2,3,5,6,3 路径长度:5
245
简单路径:1,2,3,5
❖ 图 G = (V, E)
V = 顶点集 E = 边集 = V V的子集
结点集V={a, b, c, d} 边集E={e1, e2, e3, e4, e5} 其中e1=(a, b), e2=(a, c),
e3=(a, d), e4=(b, c), e5=(c, d)。
(一)、计算无向图的传递闭包
v1→v2→v4→v8→v5 →v3→v6→v7
算法结构:
调用一次dfs(i), 可按深度优先搜索 的顺序访问处理结 点i所在的连通分 支(或强连通分 支),dfs(i)的时 间复杂度为W(n2)。 整个图按深度优先 搜索顺序遍历的过 程如下:
显然,为了避免重复访问同一个顶点,必须 记住每个顶点是否被访问过。为此,可设置 一个布尔向量visited[1..n],它的初值为 false,一旦访问了顶点vi,便将visited[i] 置为ture。 图的深度优先搜索是一个递归过程,可以使 用栈来存储那些暂时不访问的邻接点.类似于 树的前序遍历,它的特点是尽可能先对纵深 方向进行搜索,故称之深度优先搜索。
计算机的基本算法

计算机的基本算法计算机的基本算法是指在计算机科学中用于解决问题或执行任务的一系列定义良好的指令或规则。
它是计算机科学的基础,对于计算机的功能和性能起着重要的支撑作用。
本文将会介绍几种常见的基本算法,包括搜索算法、排序算法和图算法。
一、搜索算法搜索算法是用于寻找特定目标的过程,通过有限的步骤逐个检查元素,直到找到所需的目标或确定目标不存在。
以下是两种常见的搜索算法:1.1 顺序搜索顺序搜索,也称为线性搜索,是一种直观且简单的搜索算法。
它从列表的起始位置开始,逐个对比每个元素,直到找到目标元素或全部元素都被检查完毕。
顺序搜索的时间复杂度为O(n),其中n为列表的长度。
1.2 二分搜索二分搜索是一种用于有序列表的高效搜索算法。
它将目标元素与列表的中间元素进行比较,如果相等,则返回该元素的索引;如果目标元素大于中间元素,则在列表的后半部分进行二分搜索;反之,在列表的前半部分进行二分搜索。
通过将搜索范围缩小一半,二分搜索的时间复杂度为O(log n),其中n为列表的长度。
二、排序算法排序算法是一种将列表或数组中的元素按照特定顺序重新排列的算法。
以下是两种常见的排序算法:2.1 冒泡排序冒泡排序是一种简单但效率较低的排序算法。
它从列表的起始位置开始,依次比较相邻的两个元素,如果它们的顺序不正确,则交换它们的位置。
通过多次遍历列表并重复比较交换操作,最终将最大(或最小)的元素移动到列表的末尾。
冒泡排序的时间复杂度为O(n^2)。
2.2 快速排序快速排序是一种高效的排序算法,利用分治的思想将列表一分为二,并递归地对子列表进行排序。
它选择一个基准元素,将其他元素分为小于基准元素和大于基准元素的两部分,然后对这两部分分别进行快速排序,最终将它们合并成一个有序的列表。
快速排序的平均时间复杂度为O(nlog n),最坏情况下为O(n^2)。
三、图算法图算法是解决图相关问题的一类算法,其中图是由节点和边组成的数据结构。
以下是两种常见的图算法:3.1 深度优先搜索深度优先搜索是一种用于遍历或搜索图的算法。
图论知识点总结笔记
图论知识点总结笔记一、图的基本概念1. 图的定义图是由节点(顶点)和连接节点的边构成的一种数据结构。
图可以用来表示各种关系和网络,在计算机科学、通信网络、社交网络等领域有着广泛的应用。
在图论中,通常将图记为G=(V, E),其中V表示图中所有的节点的集合,E表示图中所有的边的集合。
2. 节点和边节点是图中的基本单位,通常用来表示实体或者对象。
边是节点之间的连接关系,用来表示节点之间的关联性。
根据边的方向,可以将图分为有向图和无向图,有向图的边是有方向的,而无向图的边是没有方向的。
3. 度度是图中节点的一个重要度量指标,表示与该节点相连的边的数量。
对于有向图来说,可以分为入度和出度,入度表示指向该节点的边的数量,出度表示由该节点指向其他节点的边的数量。
4. 路径路径是图中连接节点的顺序序列,根据路径的性质,可以将路径分为简单路径、环路等。
在图论中,一些问题的解决可以归结为寻找合适的路径,如最短路径问题、汉密尔顿路径问题等。
5. 连通性图的连通性是描述图中节点之间是否存在路径连接的一个重要特征。
若图中每一对节点都存在路径连接,则称图是连通的,否则称图是非连通的。
基于图的连通性,可以将图分为连通图和非连通图。
6. 子图子图是由图中一部分节点和边组成的图,通常用来描述图的某个特定属性。
子图可以是原图的结构副本,也可以是原图的子集。
二、图的表示1. 邻接矩阵邻接矩阵是一种常见的图表示方法,通过矩阵来表示节点之间的连接关系。
对于无向图来说,邻接矩阵是对称的,而对于有向图来说,邻接矩阵则不一定对称。
2. 邻接表邻接表是另一种常用的图表示方法,它通过数组和链表的组合来表示图的节点和边。
对于每一个节点,都维护一个邻接点的链表,通过链表来表示节点之间的连接关系。
3. 关联矩阵关联矩阵是另一种图的表示方法,通过矩阵来表示节点和边的关联关系。
关联矩阵可以用来表示有向图和无向图,是一种比较灵活的表示方法。
三、常见的图算法1. 深度优先搜索(DFS)深度优先搜索是一种常见的图遍历算法,通过递归或者栈的方式来遍历图中所有的节点。
计算机图形学第3章

第3章 基本图形生成算法
3.1 生成直线的常用算法
均假定所画直线的斜率k∈[0,1]。
3.1.1 DDA画线算法
DDA(Digital Differential Analyzer)画线 算法也称数值微分法,是一种增量算法。它的算 法实质是用数值方法解微分方程,通过同时对x和 y各增加一个小增量,计算下一步的x、y值。
边界表示的四连通区域种子填充算法 内点表示的四连通区域种子填充算法 边界表示的八连通区域种子填充算法 内点表示的八连通区域种子填充算法
第3章 基本图形生成算法
1.边界表示的四连通区域种子填充算法
基本思想:从多边形内部任一点(像素)出发,依“左 上右下”顺序判断相邻像素,若其不是边界像素且没有被填 充过,对其填充,并重复上述过程,直到所有像素填充完毕。 可以使用栈结构来实现该算法,算法的执行步骤如下: 种子像素入栈,当栈非空时,重复执行如下三步操作: (1)栈顶像素出栈; (2)将出栈像素置成多边形填充的颜色; (3)按左、上、右、下的顺序检查与出栈像素相邻的 四个像素,若其中某个像素不在边界上且未置成多边形色, 则把该像素入栈。
过各行各列像素中心构造一组虚拟网格线,按直 线从起点到终点的顺序计算直线与各垂直网格线的交 点,然后确定该列像素中与此交点最近的像素。 由图3-5不难看出:若s<t, 则Si比较靠近理想直线,应 选Si;若s≥t,则Ti比较靠近 理想直线,应选Ti。
第3章 基本图形生成算法
令dx=x2-x1,dy=y2-y1 递推公式 :di 1 di 2dy 2dx( yi yi 1 ) di的初值: d1 2dy dx 当di≥0时,选Ti,
第3章 基本图形生成算法
图论的基本算法及性质
图论的基本算法及性质二分图(Is-Bipartite)一个图的所有顶点可以划分成两个子集,使所有的边的入度和出度顶点分别在这两个子集中。
这个问题可以转换为上篇提到过的图的着色问题,只要看图是否能着2个颜色就行了。
当然,可以回溯解决这个问题,不过对于着2个颜色可以BFS解决。
同样,一维数组colors表示节点已着的颜色。
伪代码:IS-BIPARTITE(g,colors)let queue be new Queuecolors[0] = 1queue.push(0)while queue.empty() == falselet v = queue.top()queue.pop()for i equal to every vertex in gif colors[i] == 0colors[i] = 3 - colors[v]queue.push(i)else if colors[i] == colors[v]return falseendendreturn true时间复杂度:Θ(V+E),V表示顶点的个数,E表示边的个数DFS改良(DFS-Improve)上篇文章提到过,搜索解空间是树形的,也就是在说BFS和DFS。
那么在对图进行BFS和DFS有什么区别呢,这个问题要从解空间角度去理解。
对图进行BFS的解空间是一颗树,可叫广度优先树。
而DFS是多棵树构成的森林,可叫深度优先森林。
这里要对DFS进行小小的改良,它的性质会对解多个问题会很有帮助。
原版DFS搜索的时候,会先遍历本顶点,再递归遍历临接的顶点。
DFS改良希望能先递归遍历临接的顶点,再遍历本顶点,并且按遍历顺序逆序存储起来。
伪代码:DFS-IMPROVE(v,visited,stack)visited[v] = truefor i equal to every vertex adjacent to vif visited[i] == falseDFS-IMPROVE(i,visited,stack)endstack.push(v)这个改良版DFS有个很有用的性质就是,对于两个顶点A、B,存在A到B的路径,而不存在B到A的路径,则从记录的顺序中取出的时候,一定会先取出顶点A,再取出顶点B。
图论的基本算法

可求得拓扑有序序列: ABCD 或 ACBD
对于下列有向图
B
A
D
C
不能求得它的拓扑有序序列。
因为图中存在一个回路 {B, C, D}
求拓扑序列
FUNC toporder(var dig:adjlisttp):boolean; init(top2); m:=0; ve[1..n]:=0 while Not empty(top1) do [ j:=pop(top1); push(top2,j); m:=m+1; k:=firstadj(dig,j); while k<>0 do [ 入度(k):=入度(k)-1; if 入度(k)=0 then push(top1,k); if ve[j]+dut(<j,k>)>ve[k] then ve[k]:=ve[j]+dut(<j,k>); k:=nextadj(dig,j,k) ] ] if m<n then return(false) else return(true);
endF;
拓扑排序
核心问题:给一些序关系,排出全序!
一个一个排 先排最大 然后第二大… 具体实现?
每次取0出度点 枚举所有点吗? 0出度只可能是1出度变来的! O(n+m)
神经网络
在兰兰的模型中,神经网络就是一张有向图,图中的节点 称为神经元,而且两个神经元之间至多有一条边相连,下 图是一个神经元的例子:
图中,X1—X3是信息输入渠道,Y1-Y2是信息输出渠道, C1表示神经元目前的状态,Ui是阈值,可视为神经元的一个 内在参数。
神经元按一定的顺序排列,构成整个神经网络。在兰兰 的模型之中,神经网络中的神经无分为几层;称为输入层、 输出层,和若干个中间层。每层神经元只向下一层的神经元 输出信息,只从上一层神经元接受信息。
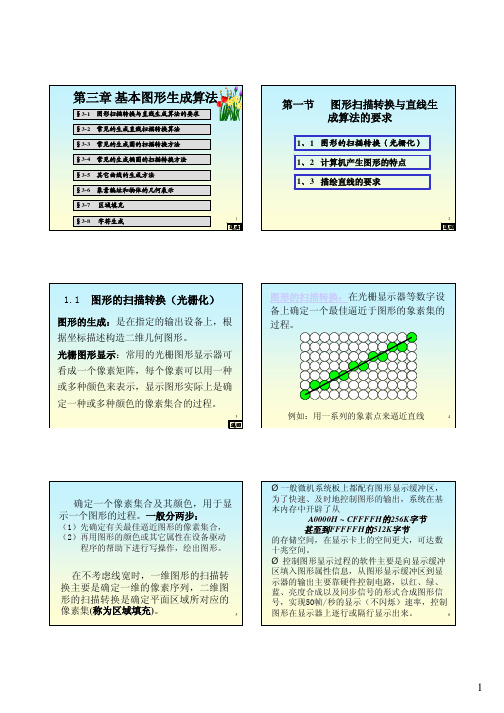
基本图形生成算法原理

基本图形生成算法原理现在的计算机能够生成各种复杂的图形,但无论其多么复杂,它都是由一些基本图形组合而成的。
因此,学习基本图形的生成算法是掌握计算机图形的基础。
本章就主要讨论一些基本图形的生成原理,如点、直线、椭圆生成。
如前面所述,目前我们使用的主要图形输出设备显示器(一般为光栅图形显示器)和打印机(喷墨、激光打印机)本质上是一种画点设备,是由一定数量的网络状细小光点(即像素)组成,使某些像素亮(将帧缓存中对应位置的值为1)和某些像素不亮(将帧缓存中对应位置的值为0)来显示图形。
因此,基本图形生成的原理是指在点阵输出设备的情况下,如何尽可能地输出最接近于原图形(理想图形)的直线或曲线图形,即以最快的速度确定最佳逼近于图形的像素集。
确定图形的像素集合并显示的过程常称之为图形的扫描转换或光栅化。
这一过程使用的计算方法称之为图形生成算法。
1 点2 直线段的生成直线是点的集合,几何学中的一条直线是由两点决定,直线在数学上可以有多种表示方法,而在计算机图形学里,直线是由离散的像素点逼近理想直线段的点的集合。
数学上的直线是没有宽度的,而计算机图形学中显示出的直线的宽度与像素点的大小有关,一个像素宽的直线的线粗为像素的边长。
由计算机生成的图形中有大量的直线段,而且曲线也是由一系列短直线段逼近生成的。
因此,研究直线生成的方法是计算机图形学的基本问题之一。
对计算机生成直线的一般要求是:线段端点的位置要准确;构成线段的像素点的集合应尽可能分布均匀,其密度应该与线段的方向及长度无关;线段生成的速度要快。
生成直线的算法有多种,这里仅介绍两种方法,即DDA 算法和Bresenham 算法。
2.1 直线DDA 算法该直线生成算法称为数值微分算法(Digital Differential Analyzer 简称DDA )。
它是一种根据直线的微分方程来产生直线的方法。
设直线的起点坐标为),(s s y x ,终点坐标为),(e e y x ,则=dx dy k xy x x y y s e s e =∆∆=-- (3-1)k 是直线的斜率。
图的连通性判断算法
图的连通性判断算法图是离散数学中一个重要的概念,它由一组顶点和连接这些顶点的边组成。
在图理论中,连通性是一个基本的性质,它描述了图中是否存在一条路径将所有的顶点连接起来。
本文将介绍一些常用的图的连通性判断算法。
1. 深度优先搜索算法(DFS)深度优先搜索算法是一种经典的图遍历算法,也可以用于判断图的连通性。
该算法从一个起始顶点开始,沿着一条路径尽可能深入地搜索图,直到无法再继续下去。
然后回溯到上一个未访问的顶点,重复上述过程,直到所有的顶点都被访问过。
如果在搜索过程中,所有的顶点都被访问到,则图是连通的;否则,图是不连通的。
2. 广度优先搜索算法(BFS)广度优先搜索算法也是一种常用的图遍历算法,可以用于判断图的连通性。
该算法从一个起始顶点开始,按照广度优先的顺序逐层遍历与当前节点相邻的顶点。
如果在遍历过程中,所有的顶点都被访问到,则图是连通的;否则,图是不连通的。
3. 并查集算法并查集是一种用于解决"动态连通性"问题的数据结构,也可以用于判断图的连通性。
并查集通过维护一个森林(或称为集合)来表示各个顶点之间的关系,其中每个集合表示一个连通分量。
并查集提供了合并集合和查找集合的操作,通过这些操作可以判断图的连通性。
4. 可连通性矩阵可连通性矩阵是一种基于矩阵的图表示方法,用于判断图的连通性。
对于一个有n个顶点的图,可连通性矩阵是一个n×n的矩阵,其中第i行第j列的元素表示顶点i和顶点j之间是否存在一条路径。
如果对于所有的顶点对(i,j),可连通性矩阵中的元素都为1,则图是连通的;否则,图是不连通的。
5. 最小生成树算法最小生成树算法是用于求解连通图的一种常用算法,它通过选取图中的一些边来构建一棵树,该树包含图中的所有顶点,并且总权值最小。
如果最小生成树的边数等于顶点数减1,则原图是连通的;否则,原图是不连通的。
总结:本文介绍了几种常用的图的连通性判断算法,包括深度优先搜索算法、广度优先搜索算法、并查集算法、可连通性矩阵和最小生成树算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.要求对于邻接矩阵和邻接链表给出从G 到TG 的算法,并计算其复杂度。
对于邻接矩阵问题十分简单,直接求矩阵的转置即可,意味着把行换成列,把列换成行,对每行操作为O(|V|),需要对|V|行操作,时间复杂度为O (|V|^2)。
对于邻接链表,很明显要遍历链表的所有结点来看:如果对于u 结点其指向的结点中有v,则在新的链表中,创建一条从v 的链表指向u 的路径,因此需要遍历所有的链表元素,因此时间复杂度为O (|V|+|E|)。
3. 给出一个多图(多图为包含重复边和自循环边的图)去除冗余边的复杂度为O(V+E)的算法。
遍历邻接链表的所有结点,对于结点u ,如果其链表中还有u ,则去除所有的u ;如果还有重复的v ,则去除除了第一个v 以外的v 结点(这里的标记方法有很多种,可以用个数组)。
这样的复杂度应该在O(V+E)。
4. 求解平方图的问题算法如下:遍历G 的邻接矩阵,对于结点u ,如果存在u 到v 的路径,则在G^2的邻接矩阵u 中加入v,然后再遍历v 结点的链表,如果存在v 到w ,则将w 也加入到G^2的邻接矩阵u 中。
时间复杂度:这样,再遍历u 的时候,如果遍历到了u →v 这条边,那就在看v 的链表,而v 的链表里最多有|V|个结点,因此总的复杂度为O (|V|+|V|·|E|)。
6. 邻接矩阵求通用汇点(入度为|V|-1但是出度为0)的算法算法如下:从(1,1)开始扫描邻接矩阵,如果(i,j )是0,则下一个扫描(i,j+1);如果(i ,j )是1,则下一个扫描(i+1,j ),当i 或者j 任一方到达|V|时停止。
这样,在最坏的情况下,扫描一行加一列或者一列加一行的结点,一共有2*|V|-1时间复杂度,因此为O(V)。
7. 关联矩阵,说明BB^T 每个元素是什么意思。
其中bij = -1 (如果边j 从结点i 发出)1(如果边j 进入i 结点) 0(其他)此处需要分类讨论:要明白B^T 中i 行相当于B 中第i 列。
①BB^T 对角线上的元素,TB B (i ,i ) =∑=|E |1j 2bij,这样如果存在一条由i 发出或者进入i 的边,都会在T B B (i ,i )中加一(因为就算是-1平方之后也是1),因此TB B (i ,i )就是代表由多少条边从i 发出或者进入。
②BB^T 非对角线元素,TB B (i ,j ) =∑=||1k E jk ikb b,由公式或者读者自己画矩阵图可以得出,如果k 边从i 发出从j 进入,或者反过来,bik*bjk 就等于-1,否则就为0。
原因是i,j不可能位于k 边的同一侧,所有必然一正一负。
如果k 不通过i 或者不通过j ,则其中一个为0,而结果为0。
因此T B B (i,j )可以表示存在多少i,j 之间的边,但是加了一个负号。
8. Adj[u]每个项不是链表而是散列表,包含(u ,v )这条边在图中存在的结点v 。
判断一条边是否在图中存在的期望时间是多少?期望的时间是O(1),但是最差情况下要扫描所有结点,因此是O(V)。
运用二叉树搜索可以将最坏的时间降低为O(lgV),但是期望时间变坏,因为没有散列表的概率了。
22.2广度优先搜索广度优先搜索的复杂度为O(V+E),其中O(V)为初始化的复杂度,O(E)为扫描邻接链表复杂度。
1——2:略3. 使用单个位来表示颜色,单个位只能表示位0/1,因此颜色只有白和灰,黑色无法表示,因此删除第十八行对每个结点扫描结束后赋值为黑色的一行代码。
证明:直接一想就可以,代码第十三行,v.color==WHITE才会进行处理,灰色同样不处理,而算法最后之所以设置为黑色,是为了在研究算法的过程中给出一个更加形象的说明而已。
4.如果换成邻接矩阵的话,BFS的时间复杂度将变为多少如果换成邻接矩阵,在扫描队列中结点i的时候,必须将mat(i,-)这一行所有的结点都扫描1遍,复杂度为O(V),而扫描队列中每个结点,因此复杂度为O(V^2)。
5.证明:在广度优先算法里,赋给结点u的u.d值与结点在邻接链表里出现的次序无关。
使用下图为例子,证明:BFS所计算出来广度优先树可以因邻接链表中的次序不同而不同。
证明:①即使在邻接链表出现的次序不同,根据广度优先搜索的算法,这些结点的u.d 值都是u.pai.d+1(pai一概表示为先驱结点),因此与次序无关。
②广度优先树也是前驱子图。
读者可行根据上图进行证明,过于简单不再细细解释,提示:t,x在链表中的不同顺序可能会导致生成两种不同的树。
6.请你举出一个图和一个树边的例子,图中源点到某一点的最短路径也是树边中的一条简单路径,但是无论在邻接链表中结点的顺序怎么排列,都无法通过BFS找到这树边。
就这样一个图,无论2,5在结点1中的顺序如果,都无法找到以下树边:因为在BFS中,3,4总会连在同一个结点上。
7.根据时间复杂度为O(n+r)很明显可以看出这是一个BFS的应用,对BFS稍加修改就可以对链表进行处理分出娃娃脸型和高跟鞋型。
8.给出一个有效算法来求树的直径,树的直径就是树的所有最短路径中的最大值。
宽度优先搜索算法恰好可以求最短路径,从树的根节点s开始运行BFS(G,s),找出最后一个结点u,然后再运行以此BFS算法BFS(G,u),这次找到宽度优先搜索的最后一个结点v的v.d值就是树的直径。
时间复杂度等同于BFS为O(V+E),在官方给出的答案中这里的时间复杂度为O(V),因为在树中边的数量和结点的数量是相关的(|E| = |V|-1),因此此处的时间复杂度进一步简化可以简化到O(V)。
9.G为一个连通无向图,给出一个算法在O(V+E)时间内计算图G中这样一个路径:该路径正反通过E中每条边恰好正反一次。
图G为一个无向图,找一个路径正好正反通过E中每条边,这个很像一个欧拉回路的问题。
也类似与用BFS生成一个树。
Make_Path(u){从u开始,如果G中存在u——v的路径并且v不在树中,则创建一个到v再返回u的环,这时候相当于设置v.pai = u;然后遍历每个u——v的v,如果v不等于u.pai,则创建一条到v的路径并执行Make_Path(v);算法最后执行路径回到u.pai;}举个例子:22.3 深度优先搜索:1.问有向图和无向图可能存在的三种颜色的点到点之间的边。
这个问题比较简单,直接上传原版答案,但是要注意,有向图中存在黑色点到其他点的边,虽然黑色点是已经搜索结束的,但是这样的边始终存在。
有向图:无向图:2.答案如下:注意其中数字没有重复的,无论如何time值都会+1。
3.给出括号结构,题目中要求的是22-4即下图:因此括号结构应该为(((())))(()),作者认为参考答案解释有所不妥。
4.与22.2中证明一位存储颜色类似。
5.根据括号化定理可轻松证明,略。
6.证明:在无向图中,根据深度优先搜索是先探索(u,v)还是先探索(v,u)来将边(u,v)分为树边或者后向边,与根据分类列表中的四种类型的次序进行分类是等价的。
证明:首先分类列表中的四种类型,树边、前向边、后向边、横向边,在无向图中只有树边和后向边。
如果u、v之间的这条边,若从u→v方向进行搜索,若先发现的u,则是一条树边,然后v也被发现;若先发现的v,则u是v的祖先结点,因此这是一条后向边。
和分类一致,得证!7.用Stack来实现深度优先搜索:DFS(G){for each vertex u belong G.Vu.color = WHITEu.pai = NILtime = 0;for each vertex u belong G.Vif u.color ==WHITEDFS_VISIT(G,u)}DFS_VISIT(G,u){time = time + 1u.color = GRAYu.d = timewhile stack != emptyv = stack.pop()time = time +1v.d = timev.color = GRAYfor each vertex w adjacent to vif w.color == WHITEstack.push(w)time = time +1v.f = timetime = time +1u.f = time}用一个栈来代替循环,与网络大部分伪代码不同的是,该处加入了time来标记u.d和u.f。
(该部分伪代码循环和条件的判断格式与算法导论书一致)8.“有向图G包含一条从结点u到结点v的路径,并且在深度优先搜索中u.d<v.d,则结点v是结点u在深度优先森林中的一个后代。
”为这句话找出一个反例。
如图左中右三点,从中间点开始深度优先搜索,先找到左边的点,再找到右边的点,深度优先森林中右边的点不是左边点的后代,虽然在图中存在一条从左边的点到右边的点的路径。
9.“如果有向图G包含一条从结点u到结点v的路径,则任何对图G的深度优先搜索都将导致v.d<=u.f。
”为这句话举出一个反例。
仍运用此图,如果深度优先搜索从中间点开始,先搜索右边点再搜索左边点,将会出现右边点的f小于左边点的d。
10.修改深度优先搜索的伪代码,让其打印出有向图G的每条边及其分类。
深度优先森林有树边,后向边,前向边,横向边(修改为粗体)DFS(G)for each vertex u belong to G.Vu.color = WHITEu.pi = NILtime = 0for each vertex u belong to G.Vif u.color == WHITEDFS-VISIT (G,u)DFS-VISIT(G,u)time = time + 1u.d = timeu.color = GRAYfor each v belong to G:Adj[u]if v.color == WHITE输出(u,v)为树边v.pi = uDFS-VISIT(G,v)if v.color == GRAY输出(u,v)为后向边if v.color == BLACK && v.f > u.d输出(u,v)为前向边if v.color == BLACK && v.f < u.d输出(u,v)为横向边u.color = BLACKtime = time + 1u.f = time如修改,在遍历到一个边的时候对v的color属性和f属性进行判断,将不同的边进行输出。
如果是无向图,与有向图相比,无向图四种边没有什么区别,因此不需要进行调整。
11.有向图的一个结点u怎样才能成为深度优先树中的唯一结点,即使结点u同时有入边和出边.a)首先结点u是一个自循环且只有自循环的结点。
b)当一个点u出边指向的点已经被搜索结束属于其他深度优先树,并且接下来搜索点u,那么将会出现u是深度优先树中的唯一结点。