川崎泵控制阀结构原理说明kv中文版
给排水相关知识:多功能水泵控制阀的结构及工作原理.doc
给排水相关知识:多功能水泵控制阀的结构及工作原理结构
多功能水泵控制阀结构参见图1,由主阀及外装附件组成。
主阀包括阀体、主阀板、缓闭阀板、阀杆、阀座以及膜片控制器(含阀盖、膜片座、膜片、膜片压板):外装附件有控制阀、过滤器、排空阀、微阻止回阀。
其中微阻止回阀是特制配件,在其止回方向设有限流孔。
安装形式参见图2。
工作原理
水泵启动前,阀门出口端压力作用在主阀板上,阀门处于关闭位置,同时膜片控制器的上腔连通压力水,下腔则与阀门进口端的低压相通。
水泵启动后,阀门进口压力逐渐升高,同时压力水通过阀门进口端的连接管缓慢进入膜片控制器下腔,实现主阀板的缓慢开启,开启速度可通过控制阀进行调节。
水泵停机,阀门进口的压力降低,当接近零流量时,主阀板在自身重力作用下迅速关闭。
因阀门进口端压力降低,阀门出口端的压力水通过连接管进入膜片控制器上腔,下腔水通过阀门进口端的连接管压回至阀门进口端,缓闭阀板缓慢关闭,慢关时间可通过控制阀进行调节。
主阀板的速闭和缓闭阀板的缓闭符合两阶段关闭规律,能有效地消除水锤。
川崎泵K3V泵说明书

川崎K3V系列斜盘式轴向柱塞泵使用说明书川崎重工业株式会社液压泵一、概述:液压泵将原动机的机械能转换成工作液体的压力能。
按其职能系统,属于液压能源元件,又称为动力元件。
液压传动中使用的液压泵都是靠密闭的工作空间的容积变化进行工作的,所以又称为容积式液压泵。
液压泵可分为齿轮泵,叶片泵,柱塞泵(按结构来分)本节主要介绍挖掘机上常用的齿轮泵、柱塞泵的基本概念、工作原理、结构特点、运用原理和维修知识。
1、液压泵的基本性能参数液压泵的主要性能参数是压力P 和流量Q(1)压力泵的输出压力由负载决定。
当负载增加时,泵的压力升高,当负载减小,泵的压力降低,没有负载就没有压力。
所以,在液压系统工作的过程中,泵的压力是随着负载的变化而变化的。
如果负载无限制的增长。
泵的压力也无限制的增高。
直至密封或零件强度或管路被破坏。
这是容积式液压泵的一个重要特点。
因此在液压系统中必须设置安全阀。
限制泵的最大压力,起过载保护作用。
在位置的布置上,安全阀越靠近泵越好。
液压泵说明书对压力有两种规定:额定压力和最大压力。
额定压力——是指泵在连续运转情况下所允许使用的工作压力,并能保证泵的容积效率和使用寿命。
最大压力——泵在短时间内起载所允许的极限压力,为液压系统的安全阀的调定值不能超过泵的最大压力值,最好的是等于或小于额定压力值。
(2)流量Q流量是指泵在单位时间输出液体的体积。
流量有理论流量和实际流量之分理论流量Q0,等于排量q 与泵转数的乘积:Q0=q*n*10-3(L/min)泵的排量是指泵每转一周所排出液体的体积。
泵的排量取决于泵的结构参数。
不同类型泵的排量记算方法也不同。
排量不可变的称为定量泵,排量可变的称为变量泵。
泵的实际流量Q小于理论流量Q0(因为泵的各密封间隙有泄漏)Q= Q0ηV = q.n.ηV /1000(L/min)式中ηV----泵的容积效率ηV =(Q(实际流量)/ Q0(理论流量))*100%齿轮泵的容积效率,ηV≥92%,柱塞泵ηV≥95%泵的泄漏量(漏损)与泵的输出压力有关,压力升高泄漏量(Q0-Q)即ΔQ增加,所以泵的实际流量是随泵的输出压力变化而变化的,而液压泵的理论流量与泵的输出压力无关。
川崎K3V泵调节器动作

川崎K3V泵调节器动作1)通过泵的控制压力控制之与操作杆行程成比例的二级先导压力,在选择器阀中转化成压力Pi 后,进入泵的调节器。
泵调节器得知操作杆的状态,从而控制泵的斜盘角度。
控制结果有流量增加和流量减少两种。
2)通过自身或另一泵输油压力控制(恒扭矩控制)通过自身输油压力和另一泵输油压力进行泵控制,具有一下两种功能:流量减少(防过载)功能,流量增加(流量恢复)功能。
流量减少(防过载)功能,当负载(压力)增加时,泵流量减少,因此发动机不会过载。
流量增加(流量恢复)功能,当负载(压力)减少时,泵流量增加,因此发动机输出功率可得到有效利用。
3)通过来自功率控制电磁阀的先导压力控制(转速传感控制)当扭矩控制电磁阀(位于泵2的调节器上)提供扭矩控制压力P时,f泵流量减少。
4)通过来自泵最大流量限制电磁阀的先导压力控制(泵最大流量控制)通过来自泵最大流量限制电磁阀的先导压力控制的操作,与通过泵控制压力控制相同。
油路中的泵最大流根据来自MC(主控制器)的信号,泵控制压力Pi量限制电磁阀器起作用。
泵最大流量限制电磁阀起减压作用,限制泵控制压力Pi5)通过最大流量转换电磁阀控制(仅限泵1)当泵1最大流量转换电磁阀起作用时,作用在制动器上的泵1最大流进入液压邮箱,由于止动器向右移动,先导柱塞向右量转换压力Pic移动得要比一般情况下更多,使泵的最大流量增加。
6)较小斜盘角度或较小流量信号优先控制当泵流量增加和减少信号同时到达时,泵调节器动作,使流量减少信号优先。
由泵控制器提供泵排量角度控制信号,扭矩控制电磁阀提供先导压力,通过杆A和杆B上的孔以及销6传递到反馈杆和伺服阀芯上,销6与杆A或杆B上的流量减少侧与孔相接触,使流量和功率减少控制优先。
川崎K3V泵说明书

川崎斜板形K3V系列轴向活塞泵目录1. 型号表示 22. 规格 33. 构造和动作原理 44. 使用上的注意事项 64-1 安装 6 4-2 配管上的注意事项7 4-3 关于过滤网9 4-4 动作油和温度范围11 4-5 使用上的注意事项12 4-6 注满油和排气12 4-7 开始运转时的注意事项13 5 故障的原因及处理145-1 一般的注意事项14 5-2 泵体异常的检查方法14 5-3 马达的过载15 5-4 泵流量的过低,排出压力不能升高时16 5-5 异常音,异常振动16 附图,附表附图1. 泵的构造图17 附图2. 泵的展开图18 附表1. 泵体装紧扭矩一览表191.型号表示K3V 112 DT - 1CE R - 9C32 – 1B2.规格*1. 闭路规格的最高旋转数使用闭路规格时,请预先商谈。
*2. 吸入压力0 kgf/cm3时的旋转数。
3. 构造及动作原理该泵的构造是两台泵以花键接头(114)相连接的,马达的旋转被传递到前部的驱动轴F (111),同时驱动两台泵。
油的吸入和排出口在二台泵的连接部即阀块(312)处汇集,前泵和后泵共用吸入口。
因为前,后泵的构造原理和动作原理是相同的,故以前泵为例,进行说明。
此泵大致由以下几个部分组成,进行泵的旋转运动的旋转机构,调整吐出流量的斜板机构,交替进行油的吸入—吐出动作的阀盖机构。
旋转机构由驱动轴F(111),油缸体(141),活塞瓦(151,152),压板(153), 球面缸衬(156), 垫片(158),油缸弹簧(157)组成。
驱动轴的两端由轴承(123,124)支持。
活塞瓦装于活塞上,形成球接头,同时减轻由负荷压力产生的推力,有一个把活塞瓦(211)上轻轻扇以调整油压平衡的壳部。
为了使活塞瓦的副机构能在支撑板上圆滑的动作,通过押板和球面缸衬,使活塞瓦被油压弹簧压在支撑板之上。
同样,油缸体也被油缸弹簧压在阀板(313)上。
斜板机构由斜板(212),活塞瓦(211),斜板支持台(251),倾转缸衬(214)倾转销(531), 伺服油缸(532)构成。
负流量控制国产中型挖掘机主阀总成(川崎KMX15RA)结构原理分析

负流量控制国产中型挖掘机主阀总成结构与原理分析导读:本篇章主要分析负流量控制的国产中型挖掘机的主阀总成(川崎KMX15RA)的结构、工作原理、增力、自动怠速、保持、再生、优先、合分流等功能。
附有大量结构原理图、零部件图、局部液压回路分析图等。
1、主阀总成概述对于该型主阀总成,主要由控制各执行元件的主换向阀芯、主溢流阀、油缸类执行元件的过载补油阀、主油路单向阀及其它用于多种局部控制的相关阀件及阀体组成。
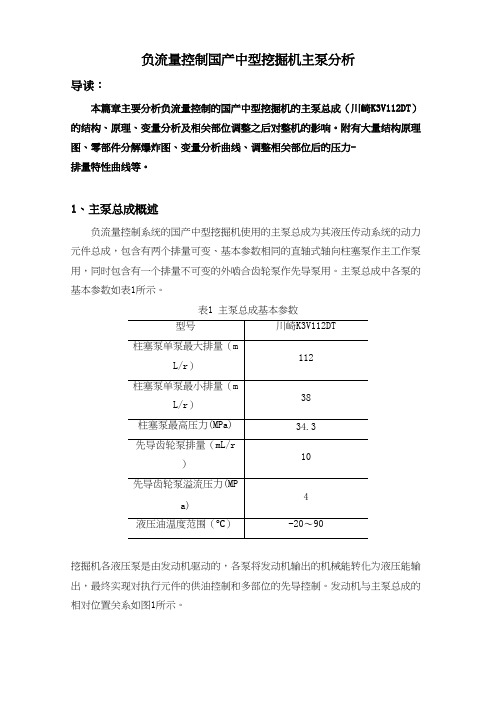
该机型使用的主阀总成基本参数如表1所示。
表1 主阀总成基本参数型号川崎KMX15RA标准流量(L/min)250溢流压力(MPa)31.4/34.3过载阀设定压力(MPa)36负流量溢流节流阀设定压力3.2(MPa)液压油温度范围(℃)-20~90对于该主阀总成,其六面视图及各管口标注如图1所示。
图1 主阀总成六面视图对于图1,其上各标注字母的管口名称解释如表2所示。
表2 主阀总成各管口名称符号接口名称符号接口名称R1回转补油接口Pz 主溢流阀升压用先导接口Ck1铲斗合流接口Py 行走压力开关信号接口Ck2铲斗合流接口Px (除行走以外)工作装置压力开关信号接口XAtr右行走前进先导接口PG 先导压力源接口XBtr 右行走后退先导接口PH先导压力源接口(XAo)(选装件先导接口)Pns回转逻辑阀先导接口(XBo)(选装件先导接口)PBP动臂优先阀先导接口XAk 铲斗挖掘先导接口Dr1泄漏油接口XBk 铲斗卸载先导接口Dr2泄漏油接口XAb1动臂提升先导接口Dr3泄漏油接口XBb1动臂下降先导接口Dr4泄漏油接口XAa2斗杆收回合流先导接Dr6泄漏油接口口XBa2斗杆伸出合流先导接口PaL斗杆保持阀(锁止阀)先导接口XAtL 左行走前进先导接口PbL动臂保持阀(锁止阀)先导接口XBtL 左行走后退先导接口Atr右行走马达(前进)主油接口XAs 左回转先导接口Btr右行走马达(后退)主油接口XBs 右回转先导接口(Ao)(选装件主油接口)XAa1斗杆收回先导接口(Bo)(选装件主油接口)XBa1斗杆伸出先导接口Ak1铲斗油缸无杆腔主油接口XAb2动臂提升合流先导接口Bk1铲斗油缸有杆腔主油接口(Psp)(回转优先先导接口)Ab1动臂油缸无杆腔主油接口XAas 斗杆收回时限制行程的先导接口Bb1动臂油缸有杆腔主油接口XAks 铲斗挖掘时限制行程的先导接口AtL左行走马达(前进)主油接口XBp1铲斗合流先导接口BtL右行走马达(后退)主油接口Dr5泄漏油接口As回转马达(左回转)主油接口P1泵接口(P1侧)Bs回转马达(右回转)主油接口P2泵接口(P2侧)Aa1斗杆油缸无杆腔主油接口R2主回油接口Ba1斗杆油缸有杆腔主油接口主阀总成的液压回路图如图2所示。
川崎液压系统ppt课件

泵 回转马达 控制阀 伺服阀
:K3V 系列 :M5X 系列 :KMX 系列 :TH 系列 (手先导阀)
PVD系列 :RCV 系列 (脚先导阀)
17
斜盘柱塞泵
18
K3V 串联式柱塞泵
for mobile applications
19
20
K3V 系列
斜盘式柱塞泵 可变排量 高压 开式 使用规格
21
挖掘机用液压部件
先导阀
多路阀
斜盘式轴向柱塞泵
斜盘式轴向柱塞马达
双速行走马达
1
挖掘机系统介绍
2
Bypass
Zero Full
1.负流量控制系统
斗杆 (2) 铲斗 动臂 (1) 备用 行走(右) 直线行走阀 行走 (左) 回转 斗杆 (1) 动臂(2)
3
PN
Zero Full
Bypass
脚先导阀 手先导阀
• 该泵位于整 机右侧门, 作用是为主 液压系统提 供液压油
工作油管
泻油管
吸油管
泵测2压4 口
一、主液压管路介绍(主泵负流
• 主控阀中位有回油 时,通过负反馈阀 组的节流孔,使油 液在节流孔前后产 生压力差
量调节)
负反馈油口Pi1:接主阀上FL口
• 将节流孔前的压力 引至泵调节器来控 制泵的排量
Psv口
1680 min-1
减速齿轮型 齿轮比
油缸工作容量 理论转矩
RG10D 20.04
RG16S 24.96
RG20D 21.78
2590cm3 4490cm3 3920cm3
10600 Nm 16500 Nm 20000 Nm
42
斜盘柱塞回转马达
1负流量控制国产中型挖掘机主泵总成(川崎K3V112DT)结构原理分析
16-O型圈;17-辅助活塞;18-O型圈;19-垫片;20-调节器;21-倾斜销;22泵壳体;
23-螺堵;24-O型圈;25-伺服活塞;26-垫片;27-O型圈;28-辅助活塞;29斜盘座;
30-衬套;31-斜盘;32-滑靴;33-柱塞;34-滑靴压板;35-球面衬套;36衬套垫圈;
负流量控制国产中型挖掘机主泵分析
导读:
本篇章主要分析负流量控制的国产中型挖掘机的主泵总成(川崎K3V112DT) 的结构、原理、变量分析及相关部位调整之后对整机的影响。附有大量结构原理 图、零部件分解爆炸图、变量分析曲线、调整相关部位后的压力排量特性曲线等。
1、主泵总成概述
负流量控制系统的国产中型挖掘机使用的主泵总成为其液压传动系统的动力
(前泵输出的油液可流经左行走、回转、动臂2(动臂副联)及斗杆1(斗杆主联 )的主换向阀芯,后泵输出的油液可流经右行走、备用(破碎锤或液压剪等)、 动臂1(动臂主联)、铲斗及斗杆2(斗杆副联)的主换向阀芯)
图3 主泵总成各部件位置及名称 对于前泵与后泵,每个泵均由泵体、输入轴、缸体、(九个带滑靴结构的) 柱塞、配流盘、斜盘、伺服活塞及对应泵调节器等组成,柱塞头部(即滑靴表面 )紧贴斜盘表面。双柱塞泵共用一个中间体,在中间体上布置有一个双泵共用的 吸油口,并布置有两个泵对应的出油口。从轴侧看,工作中,主轴顺时针旋转。 以前泵为例,如图4所示,(从轴侧看)输入轴顺时针旋转,带动缸体顺时 针旋转,因柱塞均在缸体的柱塞孔内,且柱塞头部紧贴斜盘,故在缸体在作旋转 运动的同时,柱塞一方面会随缸体作旋转运动,另一方面将在缸体的柱塞孔内作 往复直线运动,造成(缸体柱塞孔内的)柱塞尾部密封容腔交替变换,密封容腔 变大时,产生真空度,经配流盘吸油区通过中间体吸油口吸油;密封容腔变小, 即可从配流盘压油区通过泵中间体出油口向外排油,此时泵出口排油压力取决于 外负载(即排油阻力)。该型主泵的伺服活塞可带动斜盘摆动,以带动泵内部柱 塞改变有效行程,最终改变泵排量,以实现主泵工作过程中液压系统功率与发动 机功率的匹配。
川崎泵控制阀结构原理说明k v 中文版

K3V 调节器负流量控制
开始的平衡条件
随着负流量控制压力的增高
... 负流量控制阀芯克服弹簧力向右运动
驱动连杆逆时针摆动
反馈连杆顺时针摆动
伺服阀芯向右移动
伺服阀芯通道开启
... 将压力油引至伺服活塞大腔
由于大腔作用面积大
伺服活塞被向右推动减小泵的排量
... 同时也带动反馈连杆逆时针摆动
... 在复位弹簧作用下,伺服阀芯向左移动
... 以保持足够的伺服控制压力和排量
K3V 调节器两级最大流量控制级最大流量控制
开始的平衡条件
引入压力信号
阀套向右移动顶住挡圈
... 因此负流量控制阀芯克服弹簧力向右运动
驱动连杆逆时针摆动
反馈连杆顺时针摆动
伺服阀芯向右移动
伺服阀芯通道开启
... 将压力油引至伺服活塞大腔
由于大腔作用面积大
伺服活塞被向右推动减小泵的排量
... 同时也带动反馈连杆逆时针摆动
... 在复位弹簧作用下,伺服阀芯向左移动
... 以保持足够的伺服控制压力和排量
K3V 概要z效率高
z响应快
z控制范围宽
z功率范围大
z自吸转速高
z性能和可靠性高。
川崎泵的原理与调整

现在的挖掘机多为斜盘式变量双液压泵,所谓变量泵就是泵的排量可以改变,它是通过改变斜盘的摆角来改变柱塞的行程从而实现泵排出油液容积的变化。
变量泵的优点是在调节范围之内,可以充分利用发动机的功率,达到高效节能的效果,但其结构和制造工艺复杂,成本高,安装调试比较负责。
按照变量方式可分为手动变量、电子油流变量、负压油流变量、压力补偿变量、恒压变量、液压变量等多种方式。
现在的挖掘机多采用川崎交叉恒功率调节系统,多为反向流控制,功率控制,工作模式控制(电磁比例减压阀控制)这三种控制方式复合控制。
下载(44.84 KB)前天21:51调节器代码对应的调节方式下载(64.54 KB)前天21:51调节器内部结构各种控制都是通过调节伺服活塞来控制斜盘角度,达到调节液压泵流量的效果。
大家知道在压强相等的情况下,受力面积的受到的作用力就大。
下载(25.52 KB)前天21:52调节器就是运用这一原理,通过控制伺服活塞的大小头与液压泵出油口的联通关闭来控制伺服活塞的行程。
在伺服活塞大小头腔都有限位螺丝,所以通过调节限位螺丝可以调节伺服活塞最大或最小行程,达到调节液压泵的最大流量或者最小流量的效果。
下载(55.63 KB)前天21:51向内调整限制伺服活塞最大和最小行程及限制最大流量和最小流量要谈谈反向流控制,就必须要弄明白反向流是如何产生的。
在主控阀中有一条中心油道,当主控阀各阀芯处于中位时(及手柄无操作时)或者阀芯微动时(及手柄微操作时)液压泵的液压油通过中心油道到达主控阀底部溢流阀,经过底部溢流阀的增压产生方向流(注当发动机启动后无动作时液压回路是直通油箱,液压系统无压力)。
下载(57.08 KB)昨天00:30所以方向流控制的功能是减少操作控制阀在中位时,泵的流量,使泵流量随司机操作所属流量变化,改善调速性能,避免了无用能耗。
大家注意方向流控制并非交叉控制,一个泵对应一个主控阀块(一般主控阀都为双阀块)。
如果单边手柄动作速度很慢特别是回转和铲斗奇慢,复合动作正常一般就是反向流油管安装反了。
5负流量控制国产中型挖掘机主阀总成(川崎KMX15RA)结构原理分析

斗杆保持阀(锁止阀)先导 PaL
接口
动臂保持阀(锁止阀)先导 PbL
接口
右行走马达(前进)主油接 Atr
口
右行走马达(后退)主油接 Btr
口
(Ao (选装件主油接口)
) (Bo (选装件主油接口)
) Ak1 铲斗油缸无杆腔主油接口
铲斗油缸有杆腔主油接口 Bk1
液压油温度范围(℃)
-20~90
对于该主阀总成,其六面视图及各管口标注如图1所示。
-1-
-2-
图1 主阀总成六面视图
对于图1,其上各标注字母的管口名称解释如表2所示。
符号
表2 主阀总成各管口名称
符 接口名称
号
接口名称
R1 回转补油接口
Ck1 铲斗合流接口
铲斗合流接口 Ck2
Pz 主溢流阀升压用先导接口
2、主阀总成中各对应元件及局部回路分析
-5-
Hale Waihona Puke 1)动臂动作 由图2可得主阀总成中对于动臂油缸控制的局部液压回路图如图3所示。
图3 动臂油缸控制局部液压回路图
由图3,控制动臂油缸的主换向阀为两个,图中左侧处于后泵(P2)油路上的动 臂换向阀被称为动臂主联阀芯(或称为动臂1阀芯),图中右侧处于前泵(P1) 油路上的动臂换向阀被称为动臂副联阀芯(或称为动臂2阀芯),两换向阀均为 液控先导型。对于动臂的提升动作,动臂主、副联阀芯均换向;对于动臂下降动 作,将只有动臂主联阀芯换向。
-8-
图5 动臂下降动作的局部回路全剖示意图 c、动臂保持(斗杆保持于此相同) 当不操作动臂手柄时,如图3所示,动臂1阀芯处于图示中位,动臂2阀芯处 于图示左位,保持阀的先导换向阀处于图示右位。但若动臂结构件悬在半空无支 撑或铲斗未接触地面,则动臂结构件将会因自重作用产生动臂油缸无杆腔的高压 ,该部分压力油作用于动臂保持阀的主阀芯HV阀的侧面进油腔,并通过保持阀的 先导阀右位到达HV阀弹簧腔,故HV阀不打开,动臂油缸无杆腔油液被密封良好的 插装阀即HV阀封闭,动臂将可实现长时间的悬停即保持。 图6为未操作动臂动作时的保持阀的局部回路全剖示意图。
3负流量控制国产中型挖掘机回转马达总成(川崎M5X130)结构原理分析

国产中型挖掘机回转马达总成结构原理分析导读:本篇章主要分析负流量控制的国产中型挖掘机的回转马达总成(川崎M5X130)的结构、工作原理、延时制动、回转晃动防止等功能。
附有大量结构原理图、零部件分解爆炸图、局部液压回路分析图等。
1、回转马达总成概述国产中型挖掘机回转总成是由回转马达和回转减速机两部分组成,是一种直轴式轴向柱塞马达,减速机为双级行星齿轮减速机,在结构上,减速机的上部兼做回转马达的安装法兰。
图1为该回转马达的结构图。
Ⅰ:液压马达部分;Ⅰ:减速机部分1、2-回转晃动防止阀(防逆转阀、回转防颤阀);3、4-回转过载阀;5、6-补油单向阀;7、8-制动解除阀芯动、制动延时阀AⅠB-马达主工作油管;PA、PB-测压管口;M-过载补油管;DB-壳体排放管;SH-制动解除阀芯换向先导油管;PG1-制动解除待油图1 回转马达结构图该机型使用的回转马达总成基本参数如表1所示。
表1 回转马达总成基本参数型号川崎M5X130马达排量(mL/r)121.6回转溢流压力(MPa)24.5回转制动延时时间(s)5~8液压油温度范围(℃)-20~902、回转马达基本工作原理对于作为直轴式轴向柱塞马达的回转马达而言,如图2所示,若主工作油液从配流盘5的A区进油,马达回油通过配流盘B区。
则A口油液通过配流盘油区直接接触到对应柱塞的尾端面,遇负载后建压,在允许的负载压力下,直到能让马达工作。
在马达工作过程中,实际为A口高压油作用于对应柱塞尾端面(如图所示),对应柱塞轴向产生力F。
这一力F通过滑靴,分解成作用于斜盘1表面的垂直力F1和作用于轴上的径向力F2。
斜盘反作用力也将对柱塞2产生径向力与轴向力,其中,径向力通过对应柱塞将力传递给缸体3而产生对于缸体及马达主轴的转矩,该转矩使马达缸体产生周向旋转力。
因此,缸体带动输出轴以一定转速旋转。
1-斜盘;2-柱塞;3-缸体;4-主轴;5-配流盘;A、B口:马达主工作油口图2 马达基本工作原理图实际该回转马达有9个柱塞,故总有接近一半的柱塞尾部始终处于配流盘压力油区,最终斜盘反作用于这些柱塞的力传递给马达缸体后,转化为持续的旋转力矩,而马达工作中的回油将通过配流盘另一油区持续通过B管路回油箱。
川崎液压系统课件

<与其它制造商的手先导阀相比>
TH40K TH40K TH40K
RCV/RCVD 脚先导阀
型号
额定流量
最大入 口压力
控制压 力范围
操纵杆角度
[L/min]
[MPa]
[MPa]
[度]
RCV8C
10
9.8
0.5 - 4.4
+/- 12.4
独一的减震机械 总体减震室 总体止回阀 具有多样的控制任选项 脚先导阀或操纵杆型 坚固的单隔断构造 大回流和控制流量通道
39.2 MPa
M5X130
马达型号
10600 Nm
24.96
20.04
齿轮比
油缸工作容量
RG16S
RG10D
减速齿轮型
RG20D
21.78
4490cm3
2590cm3
3920cm3
理论转矩
16500 Nm
20000 Nm
180 cm3
M5X180
添加标题
斜盘柱塞回转马达
添加标题
M5X 系列
添加标题
回转优先
添加标题
再生 (动臂下降、斗杆缩进)
添加标题
动臂、斗杆锁定
添加标题
发动机转速传感系统
添加标题
动臂油缸
行走直线阀芯
仅工作行走 来自每台泵的工作流体供应至每台行走马达.
直线行走
01
脚先导阀
02
手先导阀
03
回转马达
04
脚先导阀
行走马达 手先导阀
动臂油缸
行走马达
回转马达
行走直线阀芯
工作行走和其它附件 来自前面泵的工作流体供应给两台行走马达。来自后面泵的工作流体供应给附件。
川崎液压泵工作原理
川崎液压泵工作原理
川崎液压泵工作原理:
1. 输入能量转化: 川崎液压泵是一种体积变化泵,其工作原理基于物理性质,如泵腔容积的变化等。
当液压泵的驱动装置(通常是电动机)转动时,其输入的机械能被传递到液压泵中。
2. 泵腔容积变化: 液压泵内部有一个或多个泵腔,泵腔内有一对相互咬合的齿轮或齿条。
当泵轴转动时,齿轮或齿条的位置随之改变,从而导致泵腔的容积变化。
3. 吸力过程: 泵腔容积变大时,泵内的液体压力下降,从而形成一个低压区域。
这个低压区域使得外部液体能够进入泵腔,完成液体的吸入过程。
4. 排出过程: 泵腔容积变小时,泵内的液体压力增加,从而排出泵腔内部的液体。
当液体被排出后,泵腔容积再次增大,以便进行下一个吸入过程。
5. 液体输送: 泵腔的连续吸入和排出过程使得液体能够持续从入口吸入,并通过出口被排出。
液压泵通过这种方式实现了液体的输送功能。
6. 控制阀控制输出压力: 川崎液压泵通常配备了一个控制阀,用于控制液体的输出压力。
通过调整控制阀的开启度,可以调节输出压力的大小。
川崎主泵构造原理及调试
川崎主泵动作原理(二)
8
调 节 器 的 结 构 1
9
调 节 器
的 结 构
2
压力
切断
10
调 节 器 的 结 构 3
11
恒功率调节: 泵
送压力低于折点 压力时,调节外弹 簧;泵送压力高 于折点压力时,调
节内弹簧。
调节器的原理及调节
1、恒功率工作原理及调节:
2、排量控制的工作原理:
泵送压力
排量控 制压力
调节器拆装步骤
25
调节器拆装步骤
26
调节器拆装步骤
27
调节器拆装步骤
28
调节器拆装步骤
29
谢谢观赏!
川崎主泵构造、原理及调试
研究院 裴杰
1
川崎主泵构造、原理及调试
川崎主泵型号表示 川崎主泵液压原理 川崎主泵结构图 调节器的原理及调节 川崎主泵的拆卸
2
川崎主泵的型号表示
3
川崎主泵液压原理
4
川崎主泵结构图(图一)
5
川崎主泵结构图(图二)
压力切断 恒功率调整
6
川崎主泵动作原理(一)
12
川崎泵的调试 调节器的调整
13
川崎泵的调试 调节器的调整
14
川崎泵的调试 调节器的调整
15
川崎泵的调试 调节器的调整
16
川崎主泵拆步骤
17
川崎主泵拆步骤
18
川崎主泵拆步骤
19
川崎主泵拆步骤
20
川崎主泵拆步骤
21
调节器拆装步骤
22
调节器拆装步骤
23
调节器拆装步骤
24
KV 系列液压泵的结构与控制原理PPT课件
一、 K3V63DT- 1QOR- HNOV 型液压泵结构
如图1 所示,该液压泵由主泵(斜盘式双泵串列柱塞泵)、 先导泵(齿轮泵)、泵1 调节器、泵2 调节器和转矩控制电磁 阀等组成。主泵用于向各工作装置执行机构供油,先导泵用于 先导控制油路,泵调节器根据各种指令信号控制主泵排量,以 适应发动机功率和操作者的要求,其中转矩控制电磁阀位于泵 2 调节器上。
式中:k———弹簧刚度系数; x0———弹簧的预压缩量。
如果改变电磁比例减压阀的功率转换压力pf,就可改变平衡 方程的平衡点,使补偿柱塞开始移动时的柱塞泵压力p1、p2 发生变化,即液压泵输出功率的设定值发生改变。在正常工 作情况下,转矩控制电磁阀输出压力为零,在补偿柱塞的右 端仅有功率弹簧的弹力,左端仅有柱塞泵的压力p1 和p2,防 止发动机过载的功率控制如2.1 节所述。
泵调节器的反馈杆与伺服柱塞连接并可绕其连接点转动。柱 塞泵的液压油经以下3 路进入泵调节器:一路液压油通过AB 进入 伺服柱塞小腔,使伺服柱塞小腔常通高压,推动斜盘使柱塞泵保 持在大排量;一路液压油通过CD 进入伺服阀,通过伺服阀的工 作位置来改变柱塞泵的排量;一路柱塞泵1 和柱塞泵2 的液压油分 别作用在补偿柱塞的台阶E、F上,对液压泵进行功率控制。
第17页/共18页
谢谢您的观看!
第18页/共18页
随着先导压力的变化,液压 泵的流量也随之变化,液压泵的 流量随先导压力的增大而减小, 实现了负流量控制,其控制原理如
图5 所示。这样液压泵只需供给执行机 构工作所需要的液压油,避免了传统液 压挖掘机靠溢流阀控制溢流,最大限度 地减小溢流功率损失和系统发热。
第13页/共18页
2.3 功率转换控制
功率转换控制主要是靠转矩 控制电磁阀来完成的,其内部是 电磁比例减压阀。液压泵输出功 率的大小是通过改变进入电磁比 例减压阀的电流大小来完成的, 经过电磁比例减压阀的功率转换 压力pf 作用于补偿柱塞的台阶G 和功率设定柱塞上,如图6 所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
K3V 调节器负流量控制
开始的平衡条件
随着负流量控制压力的增高
... 负流量控制阀芯克服弹簧力向右运动
驱动连杆逆时针摆动
反馈连杆顺时针摆动
伺服阀芯向右移动
伺服阀芯通道开启
... 将压力油引至伺服活塞大腔
由于大腔作用面积大
伺服活塞被向右推动减小泵的排量
... 同时也带动反馈连杆逆时针摆动
... 在复位弹簧作用下,伺服阀芯向左移动
... 以保持足够的伺服控制压力和排量
K3V 调节器两级最大流量控制级最大流量控制
开始的平衡条件
引入压力信号
阀套向右移动顶住挡圈
... 因此负流量控制阀芯克服弹簧力向右运动
驱动连杆逆时针摆动
反馈连杆顺时针摆动
伺服阀芯向右移动
伺服阀芯通道开启
... 将压力油引至伺服活塞大腔
由于大腔作用面积大
伺服活塞被向右推动减小泵的排量
... 同时也带动反馈连杆逆时针摆动
... 在复位弹簧作用下,伺服阀芯向左移动
... 以保持足够的伺服控制压力和排量
K3V 概要z效率高
z响应快
z控制范围宽
z功率范围大
z自吸转速高
z性能和可靠性高。