对无阻尼两自由度自由振动的振动系统
机械振动理论中的一些原理问答

1.请指出弹簧的串、并联组合方式的计算方法。
确定弹性元件的组合方式是串联还是并联的方法是什么?对两种组合方式分别加以说明。
答:n 个刚度为i k 的弹簧串联,等效刚度∑==ni ieq k k 111;n 个刚度为i k 的弹簧并联的等效刚度为∑==ni i eq k k 1;并联弹簧的刚度较各组成弹簧“硬”,串联弹簧较其任何一个组成弹“簧软”。
确定弹性元件是串联还是并联的方法:若弹性元件是共位移——端部位移相等,则为并联关系;若弹性元件是共力——受力相等,则为串联关系。
2.非粘性阻尼包括哪几种?它们的计算公式分别是什么? 答:非粘性阻尼包括:(1)库仑阻尼计算公式⎪⎭⎫⎝⎛⋅=.sgn -x mg F e μ,其中,sgn 为符号函数,这里定义为)()()(sgn t x t x x ∙∙∙=,须注意,当0)(x =∙t 时,库仑阻尼力是不定的,它取决于合外力的大小,而方向与之相反;(2)流体阻尼计算公式:是当物体以较大速度在粘性较小的流体(如空气、液体)中运动是,由流体介质所产生的阻尼,计算公式为⎪⎭⎫⎝⎛-=∙∙x x F n sgn 2γ;(3)结构阻尼:由材料内部摩擦所产生的阻尼,计算公式为2X E s α=∆ 3.单自由度无阻尼系统的自由振动的运动微分方程是什么?其自然频率、振幅、初相角的计算公式分别是什么?答:单自由度无阻尼系统的自由振动的运动微分方程()0=+∙∙t kx x m ; 自然频率:mk f n n ππω212==; 振幅:202⎪⎪⎭⎫ ⎝⎛+=nv x X ω;初相角:0x v arcrann ωϕ=。
4.对于单自由度无阻尼系统自由振动,确定自然频率的方法有哪几种?具体过程是什么?答:单自由度无阻尼系统自由振动,确定自然频率的方法:(1)静变形法:该方法不需要到处系统的运动微分方程,只需根据静变形的关系就可以确定出固有频率具体如下:mg k st =δ,又mkn =ω,将这两个式子联立即可求得stn gδω=;(2)能量法,该方法又可以分为三种思路来求自然频率。
单自由度无阻尼自由振动的系统分析

单自由度无阻尼自由振动的系统分析在结构动力学之中,单自由度体系的振动是最简单的振动,但单自由度体系的频率计算在结构动力学计算中有着十分重要的意义,因为从中我们能得到关于振动理论的一些最基本的概念和分析方法同时也为更复杂的多质点多自由度体系振动问题奠定基础,同时现实工程中也有许多振动问题可以简化为单自由度问题近似的利用单自由度振动理论去分析解决。
在单层厂房、水塔等建筑物中得到有效的利用结构的自由振动是指结构受到扰动离开平衡位置后,不再受到任何外力影响的振动过程,此处动力系统是否有阻尼项,会直接影响到动力系统的反应。
在此,我们把自由振动分为无阻尼自由振动与有阻尼的自由振动。
一、无阻尼自由系统的振动分析目前,以弹簧-质量系统为力学模型,研究单自由度系统的振动具有非常普遍的实际意义,因为工程中许多问题简化后,用单自由度体系的振动理论就能得到很好的解决。
而对多自由度系统和连续振动,在特殊坐标的考察时,也会显示出与单自由度系统类似的振动。
进行无阻尼自由振动分析的主要目的是为了获得系统固有振动的特性,只有充分地了解系统的自身振动特性才能有效的计算系统的动力响应,目前在单质点单自由度无阻尼自由振动体系中我们的运动方程为:0)()(..=+t ku t um (1) 或 0u(t))(=+ωt u (2)其中的ω是振动圆频率,是反应系统动力的重要参数,其计算公式为:m k m ==δω12 (3)由上式可以看出,ω只和系统的刚度及质量有关,而与系统所受到的初始受力状态无关。
ω的量纲与角速度相同为rad/s ,它反映了系统自由振动的快慢。
自由振动系统的这一特性,我们在日常生活中司空见惯。
比如,键盘类乐器标定后,按动某一个琴键,不管你按动的轻重如何,琴键所发出的声音的频率是一定的,按得轻或按得重仅影响声音的强弱。
(2)式经过三角函数的转换可表示为:)sin()(νω+=t A t u (4)其通解为t A t A t u ωωsin cos )(21+= 常数A 1与A 2与初始条件有关,01χ=A ωχ/02 =A式(4)是标准的简谐方程其中A 是其振幅,则ν是其初相角,他们的计算公式2020)(ωx x A += ,00arctan x x v ω=对于质点振动系统,质量越大,则系统的固有频率越低;刚度越大,则系统的固有频率越高。
两自由度系统-振动力学
振幅比、主振型、固有振型
1
A21 A11
k11
n21m1
k12
k22
k12
n21m2
2
A22 A12
k11 n22m1
k12
k12
k22 n22m2
1 1
特征向量、振型向量、模态向量
1
,
2
A 1
A11 A21
A11
1
1
,
A 2
A12 A22
A12
1
2
模态参数包括:
3K t I
系统按第二阶固有振型做简谐振动
x10 x0,x20 0,x10 x20 0
解得:A11 A12 x0 / 2,1 2 900
作业:3-1,3-2,3-4
x1 0.5x0 cos
K / I t 0.5x0 cos
3K t I
x2 0.5cos
K / I t 0.5x0 cos
于是有
k11 n2m1
k12
0
(7)
k21
k22 n2m2
m1m2n4 (m1k22 m2k11)n2 k11k22 k122 0
(8)
方程有两个正实根
n 1,2
m1k22 m2k11
(m1k22 m2k11)2 4m1m2 (k11k22 k122 ) 2m1m2
(9)
[K]:刚度矩阵。
{x}:位移向量
第一节 无阻尼自由振动
分析{x0},{x0}引起的自由振动
微分方程的一般形式:
m1
0
0 m2
x1 x2
k11 k 21
k12 k 22
x1 x2
0 0
第三章 两自由度系统
k12 x1 F sin t k 22 x 2 0
M x K x F sin t
三.方程求解
令方程的解为
jt xt X e
X1 X X 2
k 2 L x3 0 2 k 2 L 0
方程含有静耦合和动耦合
结论:
1. 2. 3. 4. 5. 描述一个两自由度系统的运动,所需要的独立坐标数是 确定的、唯一的,就是自由度数2。但为描述系统运动 可选择的坐标不是只有唯一的一组。 对于同一个系统,选取的坐标不同,列出的系统运动方 程的具体形式也不同,质量矩阵和刚度矩阵对不同的坐 标有不同的具体形式。 如果系统的质量矩阵和刚度矩阵的非对角元有非零的元 素,则表明方程存在坐标耦合。坐标耦合决定于坐标的 选取,不是系统的固有性质。 方程中存在耦合,则各个方程不能单独求解。 同一个系统,选取不同的坐标来描述其运动,不会影响 到系统的性质,其固有特性不变。
2 随
变化的曲线
§3.3无阻尼吸振器
一.物理模型
二.数学模型
m1 x1 k1 x1 k 2 x2 x1 F sin t m2 x2 k 2 x2 x1 0
m1 0 x1 k1 k2 k2 x1 F sin t 0 m x k k2 x2 0 2 2 2
可以解出两自由度系统的两个固有频率。
§3.4有阻尼振动
一.自由振动
1.物理模型
2.数学模型
m1 x1 c1 c2 x1 k1 k 2 x1 c2 x2 k 2 x2 0
04-1zf_两自由度系统的振动
整理得系统运动微分方程:
m1x1 (K1 K2 )x1 K2 x2 0 m2 x2 K2 x1 (K2 K3 )x2 0
引入符号:
m1x1 m2 x2
(K1 K2
x1
K2 (
安装两个齿轮的传动轴示意图
假设: (1)相对于齿轮来说,轴的质量较小 可以忽略; (2)轴的变形较大,考虑其弹性; (3)齿轮可视为集中质量元件的刚性 圆盘。
若研究系统在纸面平面内的横向振动,
在上述假设条件下,系统可简化成图两
自由度横向振动力学模型。
两自由度横向振动力学模型
若研究系统的扭振问题,两圆盘具有 转动惯量,轴具有扭转弹性,系统可 简化为两自由度扭转振动力学模型。
x20 )2
(1x10 x20 )2 2
n2
1
arctan
n1 (2 x10 2 x10
x20 x20
)
2
arctan
n
2 (1x10 1x10
x20 x20
)
例1 图示两自由度系统。已知,ml=m2=m=0.05kg, K1=K2=K3=K=20N/m。
(1)第1个方程既含有 x1 项,也含有-bx2项; 性常微分方程组。
(2)第2个方程既含有 x2 项,也含有-cxl项。
显然,这两个方程是相互耦联的,将-bx2、-cxl称为耦合项。
与单自由度振动系统运动微分方程比较:两自由度振动系统运动
微分方程是含有耦合项的二级常微分方程组。
4.1.2 固有频率与主振型
机械动力学第3章两自由度系统
b.微分方程
m1&&1 + (k1 + kc ) x1 − kc x2 = F1 (t ) x (3.1-1) ) m2 &&2 + (k 2 + kc ) x2 − kc x1 = F2 (t ) x
5
写成矩阵形式: 写成矩阵形式:
m1 0
0 &&1 k1 + kc x && + −k m2 x2 c
(3.1-12) )
讨论( 讨论(3.1-11)的解,假定 )的解,
f (t ) = Be
st
代入( 代入(3.1-11)得 )
10
3.1无阻尼自由振动 3.1无阻尼自由振动
3.1.1 固有模态振动
QQ1094860954
s +λ =0
2
(3.1-13) )
− −λt
(3.1-11)的通解 )
f (t ) = B1e
(3.1-22) )
17
3.1无阻尼自由振动 3.1无阻尼自由振动
3.1.1 固有模态振动
叫做特征向量, 叫做特征向量 振型向量或模态向量 r 1 r 2 叫做振型比 固有频率和振型向量构成系统的固有模态的基 或简称模态参数),它们表明了系统自由振动 本参数(或简称模态参数 本参数 或简称模态参数 它们表明了系统自由振动 的特性。 的特性。 两自由度系数有两个固有模态,即 两自由度系数有两个固有模态 即系统的固有 模态等于系统的自由度数。 模态等于系统的自由度数。 对于给定的系统, 对于给定的系统 特征向量或振型向量的相对比值 是确定的唯一的,和固有频率一样取决于系统的物 是确定的唯一的 和固有频率一样取决于系统的物 理参数,是系统固有的 而振幅则不同。 是系统固有的,而振幅则不同 理参数 是系统固有的 而振幅则不同。
两自由度系统的振动

2 2) ad bc , 12 和 2 都是正数,两个正实根。 3)方程仅有两个正实根的事实说明,系统可能有的同步 运动不仅是简谐的,且只能以两种频率作简谐运动。
4)ω1和ω2由由系统参数确定,称为系统的自然频率。两
2 (t ) c3 x 2 (t ) c2 [ x 2 (t ) x 1 (t )] k3 x2 (t ) k 2 [ x2 (t ) x1 (t )] F2 (t ) m2 x
整理得到
1 (t ) c1 c2 x 1 (t ) c2 x 2 (t ) k1 k 2 x1 (t ) k 2 x2 (t ) F1 (t ) m1 x m2 x2 (t ) (c2 c3 ) x2 (t ) c2 x1 (t ) (k 2 k 3 ) x2 (t ) k 2 x1 (t ) F2 (t )
由两自由度系统到更多自由度系统,则主要是量的扩充,
在问题的表述、求解方法及最主要的振动特性上没有本质 的区别。
1
2
1
2
1 1 2
2 3
6.2 两自由度系统的自由振动
一、两自由度振动系统的运动微分方程
1( 1 1
)
1(
)
2 2
2(
)
2
( )
3 3
1
2
(a)
1 1 1( 1 1(
( )
1
( )
2[ 2 (
2
1
上式表明:系统按其任一自然频率作简谐同步运动时,m1 和m2运动的振幅之比由系统本身的物理性质决定,对于特 定系统,是一个确定的量。 由于m1和m2作同步运动,任意时刻的位移之比等于振幅比
第三章 两自由度系统的振动
设两质量块振动时按同频率和同相位作简谐振动,即:令
一组解x1 A1 sin( t )、x2 A2 sin( t ),代入方程后得: [(a 2 ) A1 bA2 ]sin( t ) 0 [cA1 (d 2 )A2 ]sin( t ) 0
(a 2 ) A1 bA2 0
cA1
(d
一阶主振型。
例
练习1 如图,推导系统的频率方程并 求主振型。设滑轮为均质圆盘, 其质量为m2,质量块质量为m1, 弹簧刚度分别为K1和K2,并假定 滑轮与绳索间无相对滑动。
解:选取广义坐标为( ),
取静x,平 衡位置作为坐标原点,
进行受力分析,建立系统的运 动微分方程:
m1x K1(x r) I0 K1(x r)r K2r 2
1) 当作用于系统的主动力都是有势力时(系统没有能
量损失时),则系统具有势能U(q1,q2,···,qn),广义力
为
Qj
U q j
( j 1, 2, , n)
代入方程得: d ( T ) T U 0 dt qj q j q j
( j 1, 2, , n)
或
d ( L ) L 0 ( j 1, 2, , n)
m1l 21 (m1gl Ka2 )1 Ka22 0 m2l 22 Ka21 (m2gl Ka2 )2 0
1 2
K2 (u2 u1)2
u1
u2
代入拉氏方程,得系统的微分方程
(m1
m2 2
)u1
m2 2
u2
(K1
K2 )u1
K2u2
0
m2 2
u1
3u2 2
u2
K 2u1
K2u2
0
m1
02-振动系统的力学模型及参数
7
基于以上简化及其它假设,最终复杂 结构系统为: 无弹性的质量、无质量的弹簧,以及 纯粹阻尼组成的简单力学模型(系统)。 e.g.汽车车身,前后桥为质量,悬挂及 轮胎为弹簧,所有耗能环节视为阻尼。 形成比较理想的结构振动系统。
哈尔滨工业大学 航天学院
8
结构振动系统三元素(件) 机械系统或工程结构之所以产生振动, 是由于系统本身具有质量和弹性,而阻尼 则使振动受到抑制。 从能量的角度:质量存贮动能,弹性 存储势能,阻尼则消耗能量。
哈尔滨工业大学 航天学院
12
(3)质量元件 质量元件在力学模型中抽象为刚体。根据 Newton 第二定律,当质量上作用有载荷时,力 与加速度存在如下关系:
F m x
m —为刚体质量,单位 kg 。
哈尔滨工业大学 航天学院
13
单自由度系统 单自由度无阻尼自由振动系统 一个无质量的弹簧和一个无弹性的质 量即组成一个单自由度系统的力学模型。 (如图)该模型的参数为质量和刚度,系 统受到初始扰动后,产生振动,若在相对 较短的时间内研究其振动状态时,可认为 是一种无阻尼的自由振动。
哈尔滨工业大学 航天学院
5
(2)时不变(TI)系统假设 诸多系统在工作过程是时变的(比如 大型运载火箭)。但为了分析方便,在所 取的分析时段内,对系统作固化处理,从 工程角度视为时不变系统,从面使描述振 动的微分方程简化。 形成LTI线性定常系统 。
哈尔滨工业大学 航天学院
6
(3)非耦合假设 实际结构系统往往存在耦合现象,因 耦合引起的量值相对于主要分析的量值在 工程容差之内,可视为非耦合系统。从而 大简化分析(当然,专门研究耦合振动的 情况除外)。 大型运载火箭,液体贮箱流固耦合。
0727第三章 两自由度系统振动(讲)
第三章两自由度系统振动§3-1 概述单自由度系统的振动理论是振动理论的基础。
在实际工程问题中,还经常会遇到一些不能简化为单自由度系统的振动问题,因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。
从单自由度系统到两自由度系统,振动的性质和研究的方法有质的不同。
研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
很多生产实际中的问题都可以简化为两自由度的振动系统。
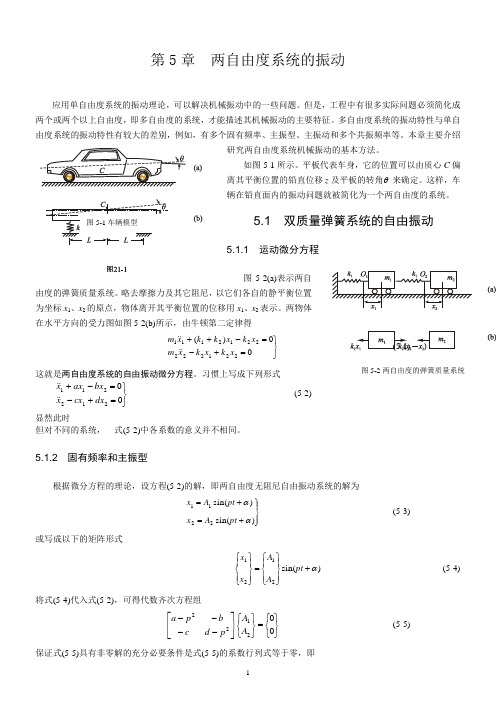
例如,车床刀架系统(a)、车床两顶尖间的工件系统(b)、磨床主轴及砂轮架系统(c)。
只要将这些系统中的主要结合面(或芯轴)视为弹簧(即只计弹性,忽略质量),将系统中的小刀架、工件、砂轮及砂轮架等视为集中质量,再忽略存在于系统中的阻尼,就可以把这些系统近似简化成图(d)所示的两自由度振动系统的动力学模型。
以图3.1(c)所示的磨床磨头系统为例分析,因为砂轮主轴安装在砂轮架内轴承上,可以近似地认为是刚性很好的,具有集中质量的砂轮主轴系统支承在弹性很好的轴承上,因此可以把它看成是支承在砂轮架内的一个弹簧——质量系统。
此外,砂轮架安装在砂轮进刀拖板上,如果把进刀拖板看成是静止不动的,而把砂轮架与进刀拖板的结合面看成是弹簧,把砂轮架看成是集中的质量,则砂轮架系统又近似地可以看成是支承在进刀拖板上的另一个弹簧——质量系统。
这样,磨头系统就可以近似地简化为图示的支承在进刀拖板上的两自由度系统。
在这一系统的动力学模型中,m1是砂轮架的质量,k1是砂轮架支承在进刀拖板上的静刚度,m2是砂轮及其主轴系统的质量,k2是砂轮主轴支承在砂轮架轴承上的静刚度。
取每个质量的静平衡位置作为坐标原点,取其铅垂位移x1及x2分别作为各质量的独立坐标。
这样x1和x2就是用以确定磨头系统运动的广义坐标。
(工程实际中两自由度振动系统) [工程实例演示]§3-2 两自由度系统的自由振动一、系统的运动微分方程(①汽车动力学模型)②以图3.2的双弹簧质量系统为例。
两个自由度体系的自由振动

• 引言 • 两个自由度体系的模型建立 • 两个自由度体系的自由振动分析
• 两个自由度体系的振动控制 • 实验验证与结果分析 • 结论与展望
01
引言
背景介绍
ቤተ መጻሕፍቲ ባይዱ
自由振动是物理学中一个重要的概念,它描述了系统在没有外部作用力的情况下 ,通过自身内部能量进行的振动。两个自由度体系是指具有两个独立方向的振动 体系,例如弹簧振荡器、单摆等。
02
通过理论分析和数值模拟,我 们发现某些参数条件下,两个 自由度体系可以发生共振或反 共振现象。
03
系统的能量在振动过程中会在 两个自由度之间转移,表现出 能量的分散和集中现象。
研究不足与展望
1
当前的研究主要集中在理论分析和数值模拟上, 缺乏实验验证,因此需要进一步开展实验研究。
2
对于两个自由度体系自由振动的动力学行为,仍 有许多未知领域需要探索,例如更高维度的自由 度体系、不同阻尼机制等。
3
需要进一步研究两个自由度体系在受到外部激励 或约束条件下的振动行为,以及与其他动力学现 象的相互作用。
THANKS
感谢观看
分析振动响应的特性,如频率、振幅、相位等,以 了解系统的自由振动行为。
03
两个自由度体系的自由振动分析
振动特性分析
固有频率
描述体系对振动的敏感程度,与体系的质量和刚度有关。
阻尼比
描述体系能量耗散的快慢,与阻尼系数和固有频率有关。
模态振型
描述体系在不同方向的振动形态,是振动特性的重要参数。
振动频率计算
自由振动在工程、自然界和日常生活中广泛存在,如乐器振动、地震波传播、桥 梁振动等。
研究意义
自由振动研究有助于深入理解物理现象的本质,探究系统内部能量转换和 传递机制。
4二自由度系统振动

)
)
0
0
sin( t ) 0
( a 2 )A1 bA2 0
cA1
(
d
2
)A2
0
这是关于 A1 和 A2 的线性齐次代数方程组。显然,A1 A2 0 是它的解, 对应于系统处于静平衡的情况。若要使 A1 与 A2 具有非零解,此方程组
的系数行列式必须等于零,即:
2
F1(t ) F2 (t )
2.1 两自由度系统的振动微分方程
写为矩阵形式:
m1
0
0 m2
x1 x2
c1 c2
c2
其中定义:
c2 c2 c3
x1 x2
k1 k2
k2
k2 k2 k3
x1 x2
F1 F2
(t (t
) )
M
m1
0
0
m2
,
C
c1 c2
但是必须指出并非任何情况下系统都可能作主振动。
x1 ax1 bx2 0 x2 cx1 dx2 0
此方程组的通解是振系的两个主振动的叠加
x1 x2
x1(1) x2(1)
x1(2) x2(2)
x1 r (1) A2(1) sin(1t 1) r (2) A2(2) sin(2t 2 )
x1 x2
F1 F2
(t (t
) )
扭转振动系统
两者坐标形式相同
2.1 两自由度系统的振动微分方程
运动微分方程的矩阵形式
定义:x x1 x2 T x x1 x2 T
x x1 x2 T
F(t) F1(t) F2 (t)T
位移向量; 速度向量; 加速度向量; 激励向量;
矩阵形式的运动微分方程Mx Cx Kx F(t)
03二自由度系统的振动
[u]T [M ][u]{&y&} + [u]T [K ][u]{y} = {0}
y 0 &&1 k1 + m 2 &&2 0 y 0 y1 0 = k 2 y 2 0
结果有 即是
m1 &&1 + k1 y1 = 0 y m 2 &&2 + k 2 y2 = 0 y
将方程组用矩阵表示如下: 将方程组用矩阵表示如下
m1 0
0 &&1 k1 + k 2 x + m 2 &&2 − k 2 x
− k 2 x1 0 = k 2 + k 3 x 2 0
一般可表示为: 一般可表示为
[M ]{&&} + [K ]{x} = {0} x
11/41
一般可表示为: 一ห้องสมุดไป่ตู้可表示为
m11 m 21
或:
m12 &&1 k11 x + m 22 &&2 k 21 x
k12 x1 0 = k 22 x 2 0
[u] =
u11 u21
u12 u22
而坐标变换为
12/41
{x} = [u]{y}
{&&} = [u]{&&} x y
一般化分析与推导如下: 一般化分析与推导如下:
m11 m 21
设变换矩阵为
m12 &&1 k11 x + m 22 &&2 k 21 x
第5章--两自由度系统的振动
5.3
5.3.l
如前所述,一般情况下两自由度系统的振动微分方程组的形式为
可见在质点m1和m2的运动方程式中,都含有坐标x1和x2。这表明,两个质点的运动不是互相独立的,它们彼此受另一个质点的运动的影响。
像这样表示振动位移的两个以上坐标出现在同一个运动方程式中时,就称这些坐标之间存在静力耦联或弹性耦联。
如图5-1所示。平板代表车身,它的位置可以由质心C偏离其平衡位置的铅直位移z及平板的转角来确定。这样,车辆在铅直面内的振动问题就被简化为一个两自由度的系统。
5.1
5.1.1
图5-2(a)表示两自由度的弹簧质量系统。略去摩擦力及其它阻尼,以它们各自的静平衡位置为坐标x1、x2的原点,物体离开其平衡位置的位移用x1、x2表示。两物体在水平方向的受力图如图5-2(b)所示,由牛顿第二定律得
主振型为
系统的振型图如图5-4所示。图(a)表明在第一主振型中二物体的振动方向是相同的;图(b)表明在第二主振型中二者的振动方向是反相的,并且弹簧上的A点是不动的,这样的点称为节点。
例5-2在图示5-3所示系统中,已知 ,求该系统对以下两组初始条件的响应:(1)t=0,x10=1cm, ;(2) 。
,
系统的第一阶和第二阶主振型为
,
于是得到第一主振动
,
第二主振动
,
在任意初始条件下,系统振动的一般解
如果初始条件是:t= 0时, , ,代入上式得到
,
因此得到双摆作自由振动的规律
,
如果弹簧的刚度k很小,即
<<
这时 相差很少,将上式写成
,
令 则上式为
,
这表明,两个摆的运动可以看作是频率为 的简谐运动,但其振幅不是常数,而是缓慢变化的简谐函数 和 ,这种现象称为拍振。
3两自由度系统振动2
解方程,进一步可得如下的两个根:
ac ac c a b n 21,2 2 2
ac ac bc 2 2
2
n2
上式是决定系统频率的方程,并称为振动系统的特征 方程。
结论:两个自由度振动系统具有两个固有频率 ,这两个固有频率只与振动系统的质量和刚度 等参数有关,而与振动的初始条件无关。 n1 n2 将所求得的 和 代入(3.7)式中可得: 2 1 a n A 2 c 1 1 1 c n 21 b A1
上式就是机械振动系统在上述初始条件下的响应。
1x 10x 20 2 1 (2x10x20) ( 2 A(1) 1 2 1 n1 )
利用主坐标解耦的方法求解系统响应
的基本步骤为: (1)求出原振动方程的固有频率和振幅 比,得到振型矩阵;
(2)求出主坐标下的响应;
(3)利用反变换式得出原广义坐标下的 响应; (4)利用初始条件确定常系数。
上式为两自由度系统振动的微分方程。
图3.2,双质量-弹簧机械振动系统中,第一个方程中 包含 bx 2 项,第二个方程中则包含 cx 1 项,统称为 “耦合项”。
以上表明,质量 m1同不仅受到弹簧 k1的恢复力的作用,而 且受到弹簧k2 的恢复力的作用; m2只受一个弹簧 k2恢复力 的作用,还受到第一质点m1 位移的影响。位移之间有耦合 称为弹性耦合;加速度之间有耦合称为惯性耦合。
,
2
2
故机械振动系统的响应为:
x1 0.4cos x 0.4cos 2
(1)运动规律
k t 0.8cos1.581 m k t 0.4cos1.581 m
k t m k t m
2.2无阻尼的自由振动和振型 振动力学课件

2 M A K A 0 (广义本征值问题)
A 有非零解的充要条件是 K 2 M 0
(系数行列式等于零)
k11 2m11 即 k21 2m21
...
kn1 2mn1
k12 2m12 k22 2m22
...
kn2 2mn2
... k1n 2m1n
利用 Kronecker 符号:
φ(i)T Mφ( j) ij mpi
φ(i
)T
Kφ( j)
ij k pi
ij
1 0
i j i j
第i 阶固有频率:
i
k pi m pi
φ(i)T Kφ( j) i2φ(i)T Mφ( j)
(i 1n)
五、正则模态(简正模态)φN(i)
定义:全部主质量皆为1的主模态 mpi φN(i)T MφN(i) 1
M ,K
12((11))
(2) 1
(2) 2
... ...
... ...
1(
( 2
n) n)
... ... ... ... ...
n(1)1
(2) n1
...
...
(n) n1
1 1 ... ... 1
系统的模态矩阵或模态是各本(特)征值(固有频率) 所对应的本征向量(固有振型)组成的。
结论:系统的固有频率和模态完全由系统的物理参数
M确, 定K ,是系统的固有特性。
例题2-1:
汽车振动简化模型如图,已知汽车质量为m,对质心转
动惯量为J,刚度系数分别为
点的距离
OC a
,k1, 长k2 度尺寸
,重l1,心l2 到O
机械振动第四章
第四章两自由度系统的振动当振动系统需要两个独立坐标描述其运动时,称为两自由度振动系统。
两自由度系统是最简单的多自由度系统,因此研究两自由度系统是分析和掌握多自由度系统的基础。
两自由度系统具有两个固有频率,两自由度系统以固有频率进行的振动与单自由度系统不同,它以固有频率进行的振动是指整个系统在运动过程中莫一位移形状,称为固有振型,因此两自由度具有两个与固有频率对应的两个固有振型。
在任意初始条件下的自由振动响应一般由两个固有振型的叠加得到。
受迫简谐振动的频率与激励频率相同。
两自由度系统的振动微分方程一般由两个联立的微分方程组成。
如果恰当地选取坐标,可使两个微分方程解除耦合,这种坐标称为主坐标或固有坐标。
用固有坐标建立的系统振动微分方程为两个独立的单自由度系统的微分方程。
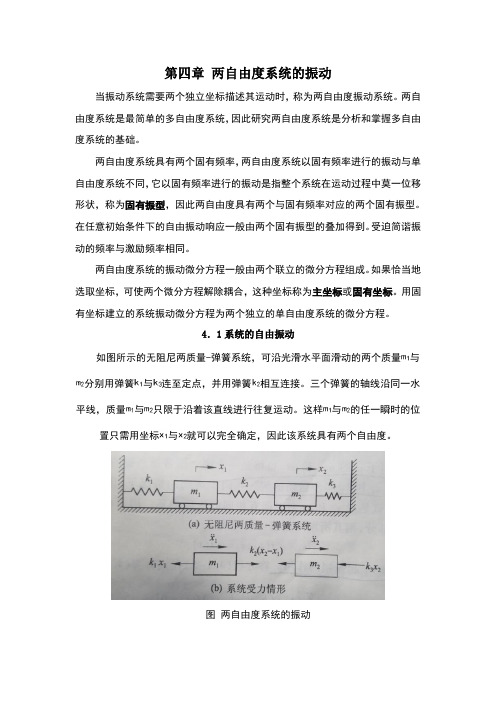
4.1系统的自由振动如图所示的无阻尼两质量-弹簧系统,可沿光滑水平面滑动的两个质量与分别用弹簧与连至定点,并用弹簧相互连接。
三个弹簧的轴线沿同一水平线,质量与只限于沿着该直线进行往复运动。
这样与的任一瞬时的位置只需用坐标与就可以完全确定,因此该系统具有两个自由度。
图两自由度系统的振动取与的静平衡位置为坐标原点。
在振动过程中任一瞬时t,与的位置分别为与,作用于与的重力于光滑水平面的法向反力相平衡,在质量的水平方向作用有弹性恢复力和,质量的水平方向则受到和作用,方向如图所示。
取加速度和力的正方向与坐标正方向一致,根据牛顿运动定律有移项得方程()就是图所示的两自由度系统自由振动的微分方程,为二阶常系数线性齐次常微分方程组。
方程()可以使用矩阵形式来表示,写成由系数矩阵组成的常数矩阵m和k分别称为质量矩阵和刚度矩阵,向量x 称为位移向量。
因此设分别为刚度矩阵k中的元素,因而方程()可以写成方程()为系统自由振动的微分方程。
方程()是齐次的,如果和位方程()的一个解,那么与其相差一个因子的和也将是一个解。
通常感兴趣的是一种特殊形式的解,也就是和同步运动的解。
机械振动理论:无阻尼二自由度的自由振动
[据一元二次方程求根公式: b b2 4ac ]
2a
2)求频率
[可证:(k11k22 k122 ) 大于零, ]
2 n12
(k11m22
k 22 m11 )
k11m22 k22m11 2 4m11m22 (k11k22 k122 ) 2m11m22
k11m22 k22m11 k11m22 k22m11 2 4m11m22k122
11
重要基本概念:
一般情况下: (1)系统的自由振动是两种不同频率主振动的叠加, 其合成结果不一定是简谐振动, 若两频率可通约[成倍数关系],运动才是周期的。
(2)[在特殊情况下],若初始条件给的合适, 系统可按某一固有频率和相应主振型作主振动。
(3)强迫振动中发生共振现象时, 振型恰是对应该频率的主振型。
机械振动理论基础
1
4.4 无阻尼二自由度的自由振动
4.4.1 固有频率、主振型。 任意两自由度系统,其无阻尼振动的微分方程组, 写成矩阵形式为:
m11 0 0 m22
x1 x2
k11 k21
k12 k22
x1 x2
0 0
( A)
给出初始条件,系统将做自由振动,如何求其振动规律呢?
k12 m22n2
A1 A2
0 0
根据线性代数可知,A1, A2 具有非零解的条件是: 上式的系数行列式必须等于零。
即:
k11 m11n2
k12
0
k12
k22 m22n2
展开后:
m11m22
4 n
k11m22 k22m11 n2 k11k22 k122 0
此式称之为频率方程或特征方程。
2 n12
(k11m22
二自由度系统.
7
Southwest Petroleum University
由系数行列式等于零得到特征方程:
(4-6)
方程的两个根为:
式中1和2唯一地决定于振动系统的质量和弹簧刚度, 称为系统的固有频率。1为第一阶固有频率,简称为 基频;2为第二阶固有频率。
8
Southwest Petroleum University
为推导系统的运动方程,对质量m1、m2绘分离体图(如图4-1b), 用牛顿第二定律列分离体在水平方向的力平衡方程得 (4-1)
整理得:
(4-2) 由两个联立二阶常微分方程所描述的系统称为二自由度系统。方 程(3-2)可以方便地表示成矩阵形式,引入 (4-3)
4
Southwest Petroleum University
考虑如图4-1a所示的具有粘性阻尼的二自由度系统,系统由质
量m1、m2,弹簧k1、k2、k3和阻尼器 c1、c2、c3组成。 首先推导系统的运动微分方程。系统的运动可以完全由坐标
x1 (t )和x2 (t ) 来描述。
图4-1 二自由度系统模型
3
Southwest Petroleum University
9
Southwest Petroleum University
把1 , 2
分别代入(4-5)可得同一频率的简谐波在x1,x2
坐标中的振幅比
B1 k21 12 m1 k11 2 1 A1 1 m2 k22 k12
1和2:
B2 k21 2 2 m1 k11 2 2 A2 2 m2 k22 k12
系统在一般情况下的运动是两个同步运动的叠加,所以, 在一般的初干扰下,系统的响应是:
x1 A1 cos 1t 1 A2 cos 2t 2 x2 B1 cos 1t 1 B2 cos 2t 2