stm32中断使能
stm32单片机中断原理
STM32单片机中断原理1. 什么是中断?在计算机系统中,中断是一种硬件或软件的事件,它打断了正在执行的程序,使CPU能够立即响应某个特定的事件。
中断机制是一种实现多任务处理的重要技术,它能够提高系统的响应速度和处理效率。
2. 中断的基本原理中断的基本原理是通过打断正在运行的程序,跳转到一个中断服务程序(ISR,Interrupt Service Routine)来处理特定的事件。
当发生中断时,CPU会暂停当前的任务,保存上下文(包括程序计数器、寄存器等),然后跳转到中断服务程序执行。
中断服务程序完成后,CPU会恢复之前的任务继续执行。
3. STM32中断的分类在STM32单片机中,中断可以分为两类:外部中断和内部中断。
•外部中断:是由外部设备(如按键、传感器等)触发的中断。
STM32单片机通常具有多个外部中断引脚,可以通过配置外部中断触发源来响应外部设备的事件。
•内部中断:是由单片机内部的事件触发的中断。
例如,定时器溢出、串口接收完成等。
4. STM32中断的基本原理为了使用中断功能,需要进行以下几个步骤:步骤1:中断向量表的配置中断向量表是一个存储中断服务程序地址的表格,用于指示中断发生时应该跳转到哪个中断服务程序执行。
在STM32单片机中,中断向量表位于Flash的起始地址处。
需要在代码中定义中断向量表,并将每个中断的中断服务程序地址写入相应的中断向量表项。
步骤2:中断优先级的配置每个中断都有一个优先级,用于确定中断的相对重要性。
在STM32单片机中,中断优先级可以通过设置优先级分组和优先级子组来进行配置。
优先级分组决定了中断优先级的位数和分配方式,优先级子组决定了同一分组内部的优先级划分。
步骤3:中断源的配置在STM32单片机中,可以通过配置寄存器来选择特定的中断源。
例如,可以通过配置GPIO的寄存器来选择某个引脚触发的外部中断源。
步骤4:中断服务程序的编写中断服务程序是中断发生时需要执行的代码。
stm32 usart idle中断原理

stm32 usart idle中断原理STM32是一款广泛应用于嵌入式系统的微控制器,它具有丰富的外设资源,其中包括USART(Universal Synchronous/Asynchronous Receiver/Transmitter)模块。
USART模块是STM32的重要组成部分,它能够实现串行通信,其中的Idle中断是USART模块的一个重要功能。
本文将详细介绍STM32 USART模块的Idle中断原理。
我们先来了解一下USART模块的基本功能。
USART模块是一种通用的串行通信接口,它可以实现全双工通信,支持同步和异步两种通信模式。
在STM32中,USART模块通常用于与外部设备进行通信,如传感器、无线模块等。
USART模块具有多种工作模式,包括异步模式、同步模式和单线模式等。
在USART模块中,Idle中断是一种特殊的中断方式。
当USART接收到一帧数据后,如果在接收数据的过程中一段时间没有接收到新的数据,USART模块会认为这段时间是数据的结束,此时就会产生Idle中断。
Idle中断的产生可以作为接收完成的标志,可以在中断服务函数中进行相关的处理操作。
那么,Idle中断是如何实现的呢?在USART模块内部,有一个专门用于检测空闲状态的电路,该电路会监测串口接收线上的电平状态。
当串口接收线上的电平保持不变一段时间时,USART模块就会判断为接收到了一帧完整的数据。
这段时间就是我们所说的“空闲时间”。
当USART模块检测到空闲时间超过一定阈值时,就会产生Idle中断。
在STM32中,可以通过配置USART的相关寄存器来使能和配置Idle中断。
首先,我们需要使能USART的空闲检测功能,可以通过设置CR1寄存器中的IDLEIE位来实现。
然后,我们需要在NVIC 中使能USART的中断,可以通过设置ISER寄存器中对应的位来实现。
当USART接收到一帧数据后,如果在接收过程中超过了一定的空闲时间,USART模块就会产生Idle中断,此时会触发中断服务函数。
stm32空闲中断原理

stm32空闲中断原理STM32空闲中断原理解析概述在STM32单片机的应用开发中,空闲中断是一种非常重要的中断方式。
它允许在系统空闲时执行特定的处理函数,提高了系统的效率和响应性。
本文将从浅入深,逐步解释STM32空闲中断的原理和应用。
什么是空闲中断空闲中断,即空闲时中断,在STM32中是指当处理器空闲且没有其他中断服务请求时触发的一种中断。
它是一种基于处理器空闲时间的中断方式,不需要外部触发或特定事件的发生。
空闲中断的原理STM32的空闲中断是通过处理器中的一个特殊寄存器实现的,该寄存器监测处理器的空闲状态。
当处理器处于空闲状态时,触发空闲中断,并执行用户定义的中断服务函数。
空闲中断的配置步骤1: 中断初始化在使用空闲中断之前,需要先进行中断的初始化。
这包括配置中断向量表、中断优先级和中断服务函数等。
步骤2: 编写中断服务函数中断服务函数是空闲中断触发时执行的代码。
它可以是一段自定义的C代码,用于处理特定的任务或操作。
步骤3: 启用空闲中断使用特定的寄存器配置,启用空闲中断功能。
在这里,需要将空闲中断使能位设置为”1”,使能处理器检测空闲状态。
空闲中断的应用场景空闲中断可以应用于多个领域和应用中,主要包括以下几个方面:- 数据处理:通过空闲中断处理数据,提高数据处理的效率。
- 状态检测:通过空闲中断检测特定的系统状态,如电量低、网络连接等。
- 系统维护:在系统空闲时执行一些系统维护任务,例如清理内存、更新数据等。
总结STM32的空闲中断为系统开发者提供了一种高效且灵活的中断方式,可以在处理器空闲时执行特定的任务。
本文简要介绍了空闲中断的原理和配置步骤,并给出了一些应用场景。
希望读者通过本文的介绍,对STM32空闲中断有更深入的了解,能够在实际开发中应用自如。
以上就是对STM32空闲中断原理的解析,希望对读者有所帮助。
stm32外部中断实验报告-STM32实例外部中断实验
stm32外部中断实验报告_STM32实例外部中断实验上⼀篇⽂章我们介绍了 STM32F10x 的中断,这次我们就来学习下外部中断。
本⽂中要实现的功能与按键实验⼀样,即通过按键控制LED,只不过这⾥采⽤外部中断⽅式进⾏控制。
学习时可以参考《STM32F10x 中⽂参考⼿册》-9 中断和事件章节。
外部中断介绍EXTI 简介STM32F10x 外部中断/事件控制器(EXTI)包含多达 20 个⽤于产⽣事件/中断请求的边沿检测器。
EXTI 的每根输⼊线都可单独进⾏配置,以选择类型(中断或事件)和相应的触发事件(上升沿触发、下降沿触发或边沿触发),还可独⽴地被屏蔽。
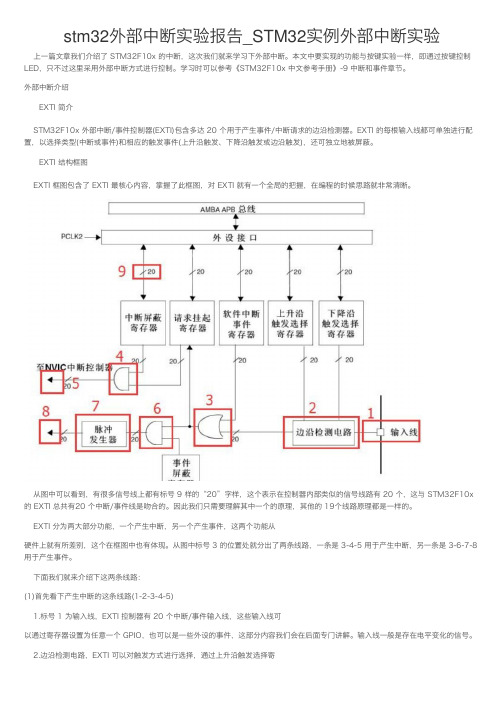
EXTI 结构框图EXTI 框图包含了 EXTI 最核⼼内容,掌握了此框图,对 EXTI 就有⼀个全局的把握,在编程的时候思路就⾮常清晰。
从图中可以看到,有很多信号线上都有标号 9 样的“20”字样,这个表⽰在控制器内部类似的信号线路有 20 个,这与 STM32F10x 的 EXTI 总共有20 个中断/事件线是吻合的。
因此我们只需要理解其中⼀个的原理,其他的 19个线路原理都是⼀样的。
EXTI 分为两⼤部分功能,⼀个产⽣中断,另⼀个产⽣事件,这两个功能从硬件上就有所差别,这个在框图中也有体现。
从图中标号 3 的位置处就分出了两条线路,⼀条是 3-4-5 ⽤于产⽣中断,另⼀条是 3-6-7-8⽤于产⽣事件。
下⾯我们就来介绍下这两条线路:(1)⾸先看下产⽣中断的这条线路(1-2-3-4-5)1.标号 1 为输⼊线,EXTI 控制器有 20 个中断/事件输⼊线,这些输⼊线可以通过寄存器设置为任意⼀个 GPIO,也可以是⼀些外设的事件,这部分内容我们会在后⾯专门讲解。
输⼊线⼀般是存在电平变化的信号。
2.边沿检测电路,EXTI 可以对触发⽅式进⾏选择,通过上升沿触发选择寄存器和下降沿触发选择寄存器对应位的设置来控制信号触发。
边沿检测电路以输⼊线作为信号输⼊端,如果检测到有边沿跳变就输出有效信号 1 给红⾊框 3 电路,否则输出⽆效信号 0。
stm32刹车中断的用法

stm32刹车中断的用法STM32刹车中断的用法一、引言在STM32单片机应用中,刹车功能是非常重要的,特别是在需要实现高精度控制的应用中,如电机控制、机器人等。
为了实现有效刹车操作,STM32提供了刹车中断功能。
本文将一步一步回答如何使用STM32刹车中断的问题,并介绍其中的重要知识点和注意事项。
二、刹车中断概述刹车中断是STM32单片机上的一种特殊的中断方式,用于在需要刹车操作时,及时中断当前的程序执行,并进行刹车操作。
刹车中断可以响应外部的刹车触发信号,根据配置的中断优先级,及时中断当前的任务。
三、刹车中断的配置步骤下面我们将一步一步来介绍如何配置STM32的刹车中断。
1. 硬件连接首先,需要将外部的刹车触发信号连接到STM32单片机的相应引脚。
确保引脚连接正确,以便触发中断。
2. 中断优先级设置刹车中断可能与其他中断并存,所以需要设置中断优先级。
在STM32开发环境中,可以通过寄存器来设置中断优先级。
首先确定中断的优先级级别,然后设置相关的寄存器。
3. 中断触发方式设置刹车中断可以根据不同的触发方式进行配置,常见的有边沿触发和电平触发。
边沿触发分为上升沿触发和下降沿触发,在中断配置中需要指定具体的触发方式。
4. 中断服务程序编写刹车中断触发后,需要执行相应的中断服务程序,即处理刹车操作。
在编写中断服务程序时,需要考虑到刹车的具体需求,包括刹车类型(硬刹车还是软刹车)、刹车力度等。
5. 中断使能最后,需要将刹车中断使能,确保刹车触发后可以中断当前的任务,并执行相应的中断服务程序。
通过寄存器设置可以实现中断使能。
四、刹车中断的重要知识点和注意事项在使用STM32刹车中断时,需要注意以下几个方面的问题。
1. 中断优先级冲突由于STM32单片机上可以同时存在多个中断,不同的中断可能具有不同的优先级。
在进行中断配置时,需要避免中断优先级冲突,避免不必要的中断屏蔽等问题。
2. 中断服务程序的执行时间刹车中断服务程序应尽量保持执行时间短,以避免影响其他任务的执行。
STM32中断优先级和开关总中断
一,中断优先级:STM32(Cortex-M3)中的优先级概念STM32(Cortex-M3)中有两个优先级的概念——抢占式优先级和响应优先级,有人把响应优先级称作'亚优先级'或'副优先级',每个中断源都需要被指定这两种优先级。
具有高抢占式优先级的中断可以在具有低抢占式优先级的中断处理过程中被响应,即中断嵌套,也就是说高抢占式优先级的中断可以嵌套低抢占式优先级的中断。
如果两个中断源的抢占式优先级相同,这两个中断将没有嵌套关系,当一个中断到来后,如果正在处理另一个中断,这个后到来的中断就要等到前一个中断处理完之后才能被处理。
如果这两个中断同时到达,则中断控制器根据他们的响应优先级高低来决定先处理哪一个;如果他们的抢占式优先级和响应优先级都相等,则根据他们在中断表中的排位顺序来决定先处理哪一个。
既然每个中断源都需要被指定这两种优先级,就需要有相应的寄存器位记录每个中断的优先级;在Cortex-M3 中定义了8个比特位用于设置中断源的优先级,这8个比特位可以有8种分配方式,如下所示:所有8位用于指定响应优先级最高1位用于指定抢占式优先级,最低7位用于指定响应优先级最高2位用于指定抢占式优先级,最低6位用于指定响应优先级最高3位用于指定抢占式优先级,最低5位用于指定响应优先级最高4位用于指定抢占式优先级,最低4位用于指定响应优先级最高5位用于指定抢占式优先级,最低3位用于指定响应优先级最高6位用于指定抢占式优先级,最低2位用于指定响应优先级最高7位用于指定抢占式优先级,最低1位用于指定响应优先级这就是优先级分组的概念。
--------------------------------------------------------------------------------Cortex-M3允许具有较少中断源时使用较少的寄存器位指定中断源的优先级,因此STM32把指定中断优先级的寄存器位减少到4位,这4个寄存器位的分组方式如下:第0组:所有4位用于指定响应优先级第1组:最高1位用于指定抢占式优先级,最低3位用于指定响应优先级第2组:最高2位用于指定抢占式优先级,最低2位用于指定响应优先级第3组:最高3位用于指定抢占式优先级,最低1位用于指定响应优先级第4组:所有4位用于指定抢占式优先级可以通过调用STM32的固件库中的函数NVIC_PriorityGroupConfig()选择使用哪种优先级分组方式,这个函数的参数有下列5种:NVIC_PriorityGroup_0 =>选择第0组NVIC_PriorityGroup_1 =>选择第1组NVIC_PriorityGroup_2 =>选择第2组NVIC_PriorityGroup_3 =>选择第3组NVIC_PriorityGroup_4 =>选择第4组接下来就是指定中断源的优先级,下面以一个简单的例子说明如何指定中断源的抢占式优先级和响应优先级:// 选择使用优先级分组第1组NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);// 使能EXTI0中断NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQChannel;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 指定抢占式优先级别1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 指定响应优先级别0 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);// 使能EXTI9_5中断NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQChannel;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 指定抢占式优先级别0NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; // 指定响应优先级别1 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);要注意的几点是:1)如果指定的抢占式优先级别或响应优先级别超出了选定的优先级分组所限定的范围,则可能得到意想不到的结果;2)抢占式优先级别相同的中断源之间没有嵌套关系;3)如果某个中断源被指定为某个抢占式优先级别,又没有其它中断源处于同一个抢占式优先级别,则可以为这个中断源指定任意有效的响应优先级别。
STM32外部中断处理流程
STM32外部中断处理流程外部中断是指引发中断的事件来自于MCU外部的输入引脚或外设,需要通过配置寄存器和中断服务程序来处理外部中断。
在STM32系列MCU中,外部中断处理可分为以下几个步骤。
1.配置中断引脚要使用外部中断功能,首先需要配置中断引脚。
对于STM32,外部中断引脚由GPIO口提供,需要通过GPIO配置寄存器设置相关引脚的工作模式、上下拉和中断触发方式等。
具体配置方法可以参考芯片手册。
2.配置中断控制器外部中断的中断源需要连接到中断控制器(NVIC),通过配置NVIC的相关寄存器来使能外部中断。
NVIC是位于ARM Cortex-M内核内部的外设,用于管理和分配中断优先级。
3.编写中断服务程序(ISR)中断服务程序(Interrupt Service Routine, ISR)是用于处理中断事件的函数,当外部中断引发时,MCU会跳转到相应的ISR进行处理。
在编写ISR时,需要注意以下几点:-确定中断源:可以通过读取中断状态寄存器来判断是哪个外部中断引起的中断。
-处理中断事件:根据中断源的不同,进行相应的处理。
例如,可以读取输入引脚状态、处理外设状态等。
-清除中断标志位:要在ISR内部清除中断标志位,以允许MCU再次响应该外部中断。
具体方法是通过读取相应的寄存器或调用相关函数清除中断标志位。
4.配置中断优先级中断优先级用于确定ISR的响应顺序,优先级较高的中断先被处理。
在STM32中,中断优先级可以通过配置中断控制器的相关寄存器进行设置。
5.启用中断在完成上述步骤后,需要启用相应的中断引脚和中断控制器。
具体方法是通过设置GPIO寄存器来使能中断引脚,并通过设置NVIC寄存器来使能相关中断。
6.处理中断请求一旦发生外部中断事件,MCU就会跳转到相应的ISR进行中断处理。
在ISR中,可以根据需要调用其他的函数或执行其他的操作。
处理完成后,可以通过清除中断标志位和退出中断函数来结束中断处理。
STM32外部中断以及中断优先级
外部中断(zhōngduàn)的初始化过程:1.初始化IO为输入(shūrù)(可以设置上拉,下拉,浮空)2.开启(kāiqǐ)IO复用(fù yònɡ)时钟3.开启(kāiqǐ)与该IO相对的线上(详解下)4.配置NVIC,使能中断5.编写中断服务函数外部中断:Stm32中总共有19个外部中断包括:线0-15:IO输入中断(每条线上最多有7个IO,如GPIOA~GPIOG,但是每一条线每次只允许同时连接到一个IO)线16:PVD线17:RTC线18:USB关于(guānyú)优先级:CM3中内核(nèi hé)支持256个中断(zhōngduàn)(16个内核(nèi hé)+240外部(wàibù))和可编程256级中断优先级的设置Stm32目前(mùqián)支持84个中断(zhōngduàn)(16个内核(nèi hé)+68个外部(wàibù),注:不是(bù shi)指68个外部中断),16级可编程优先级(优先级设置寄存器中使用了4位)注意:其中(qízhōng)外部中断5-9和中断(zhōngduàn)10-15向量存放(cúnfàng)在一起优先级:数值(shùzí)低的优先级要高于数值高的!!!!!!上电复位后,系统默认(mòrèn)使用的是组0;一个系统只能使用一组优先级组,不可使用多个,优先级的设置不能超过组的范围,否则会产生不可预计的错误1.高抢先级的中断可以打断低优先级的中断响应,构成中断嵌套2.相同抢先级的中断不可以构成嵌套,系统会优先响应子优先级高的3.当2(n)个相同抢先优先级和相同子优先级的中断(zhōngduàn)出现,STM32首先响应中断通道所对应的中断向量地址(dìzhǐ)低的那个中断4.0号抢先优先级的中断,可以(kěyǐ)打断任何中断抢先优先级为非0号的中断(zhōngduàn);1号抢先优先级的中断(zhōngduàn),可以打断任何中断抢先优先级为2、3、4号的中断;……;构成中断嵌套。
stm32单片机设计定时器中断实现1s的led灯闪烁知识应用

stm32单片机设计定时器中断实现1s的led灯闪烁知识应用要实现1s的LED灯闪烁,可以使用STM32单片机的定时器中断来控制LED的开关。
以下是实现的步骤:1. 配置定时器:选择一个定时器(如TIM2)并设置适当的预分频和计数值,以实现1s的定时周期。
2. 配置中断:使能定时器中断,并将中断优先级设置为适当的值(较高优先级)。
3. 初始化LED引脚:将LED引脚设置为输出,并初始化为高电平(LED关闭)。
4. 编写中断处理程序:在中断处理程序(如TIM2_IRQHandler)中,切换LED引脚的状态。
例如,如果LED引脚当前为高电平,则将其设置为低电平,反之亦然。
5. 启动定时器:启动定时器以开始定时。
整个步骤如下所示的代码示例:```c#include "stm32fxx.h"void TIM2_IRQHandler(void){if(TIM2->SR & TIM_SR_UIF){TIM2->SR &= ~TIM_SR_UIF; // 清除中断标志位// 切换LED引脚状态if(GPIOC->ODR & GPIO_ODR_ODR0)GPIOC->ODR &= ~GPIO_ODR_ODR0; // 关闭LEDelseGPIOC->ODR |= GPIO_ODR_ODR0; // 打开LED}}int main(){// 初始化LED引脚RCC->AHB1ENR |= RCC_AHB1ENR_GPIOCEN; // 使能GPIOC时钟GPIOC->MODER |= GPIO_MODER_MODER0_0; // 将PC0设置为输出模式GPIOC->OSPEEDR |= GPIO_OSPEEDR_OSPEED0; // 设置PC0输出速度// 配置定时器RCC->APB1ENR |= RCC_APB1ENR_TIM2EN; // 使能TIM2时钟TIM2->PSC = 8399; // 将预分频设置为8400-1,得到10kHz 的计数频率TIM2->ARR = 9999; // 将计数值设置为10000-1,得到1s的定时周期// 配置中断TIM2->DIER |= TIM_DIER_UIE; // 使能更新中断NVIC_EnableIRQ(TIM2_IRQn); // 使能TIM2中断NVIC_SetPriority(TIM2_IRQn, 0); // 设置TIM2中断优先级为最高// 启动定时器TIM2->CR1 |= TIM_CR1_CEN; // 启动TIM2定时器while(1){// 程序主循环}return 0;}```以上代码使用了TIM2定时器和PC0引脚作为LED灯的控制。
stm32解决中断冲突的方法
stm32解决中断冲突的方法如何解决STM32中的中断冲突第一步:了解STM32中断机制STM32微控制器系列是STMicroelectronics开发的一系列32位ARM Cortex-M内核的微控制器。
STM32使用向量中断控制器(NVIC)来管理中断。
每个可中断源都有一个特定的中断优先级,并且可以通过调整优先级来控制中断的触发和处理顺序。
中断是STM32系统中非常重要的一部分,它允许微控制器在处理其他任务时根据需要对外部事件作出响应。
但是,在STM32中使用多个中断时可能会出现冲突的问题。
这可能导致一些中断无法触发或中断优先级错误。
为了解决这个问题,可以采取以下方法。
第二步:了解中断冲突的原因中断冲突可能是由于中断优先级设置错误、中断嵌套问题或中断间共享资源引起的。
中断优先级设置错误是指中断的优先级设置不正确,导致某些中断会被覆盖或延迟触发。
中断嵌套问题是指当一个中断正在处理时,另一个中断发生,导致中断无法正确触发。
中断间共享资源引起的冲突是指多个中断同时访问共享资源,导致数据错误或冲突。
第三步:调整中断优先级首先,调整中断的优先级是解决中断冲突的关键。
在STM32中,每个中断源都有一个特定的优先级,范围从0到15。
较低的数值表示更高的优先级,而较高的数值表示较低的优先级。
为了更好地控制中断触发和处理顺序,可以根据系统需求适当调整中断的优先级。
调整中断优先级可通过在NVIC中设置相关的中断控制器寄存器来实现。
有两个关键的寄存器需要设置:中断优先级寄存器(IPR)和中断使能寄存器(IER)。
中断优先级寄存器用于设置中断的优先级,而中断使能寄存器用于使能或禁用中断。
为了防止冲突,可以将高优先级的中断设置为较低的值(例如0或1),而将低优先级的中断设置为较高的值(例如14或15)。
这样可以确保高优先级的中断首先得到处理,从而避免了中断冲突。
第四步:正确处理中断嵌套另一个常见的中断冲突问题是中断嵌套。
stm32 freertos 中断写法

在STM32微控制器上使用FreeRTOS实时操作系统时,中断服务例程(ISR)的写法需要遵循一定的规范,以确保中断处理能够在不同的任务之间正确地进行。
以下是一些基本步骤和注意事项,用于在FreeRTOS中实现中断服务例程:1. **中断向量表初始化**:在系统启动时,需要初始化中断向量表,将中断处理函数的地址映射到相应的中断号上。
2. **中断优先级设置**:在FreeRTOS中,可以通过NVIC(嵌套向量中断控制器)设置中断的优先级。
在中断服务例程中,可以使用`HAL_NVIC_SetPriority`函数设置优先级。
3. **中断使能**:在中断服务例程编写完成后,需要使用`HAL_NVIC_EnableIRQ`或`HAL_NVIC_Enable`函数使能中断。
4. **中断服务例程的原型**:中断服务例程应该有一个原型,其中包含了中断号和中断服务例程的函数指针。
5. **在中断服务例程中保护现场**:在进入中断服务例程之前,应该保存CPU的状态,包括程序计数器和其他必要的寄存器,以防止中断服务例程被其他中断打断。
6. **中断服务例程的退出**:在中断服务例程结束时,应该恢复之前保存的状态,并使用`HAL_NVIC_DisableIRQ`或`HAL_NVIC_Disable`函数禁用中断。
7. **使用FreeRTOS的API**:如果需要在中断服务例程中使用FreeRTOS的API,比如创建任务、等待消息等,应该确保这些操作不会导致中断被禁止的时间过长,以免影响系统的响应性。
以下是一个简单的STM32中断服务例程的示例代码:```cvoid EXTI0_IRQHandler(void) {// 保存状态HAL_NVIC_DisableIRQ(EXTI0_IRQn); // 禁用中断// 中断处理逻辑// ...// 恢复状态HAL_NVIC_EnableIRQ(EXTI0_IRQn); // 使能中断} ```。
STM32外部中断原理与配置
STM32外部中断原理与配置STM32-外部中断原理与配置IO⼝外部中断原理概述STM32控制器⽀持的外部中断/事件请求中断线M3M4M7EXTI线0~15:对应外部IO⼝的输⼊中断。
√√√EXTI线16:连接到PVD输出。
√√√EXTI线17:连接到RTC闹钟事件。
√√√EXTI线18:连接到USB OTG FS唤醒事件。
√√√EXTI线19:连接到以太⽹唤醒事件。
√√EXTI线20:连接到USB OTG HS(在FS中配置)唤醒事件√√EXTI线21:连接到RTC⼊侵和时间戳事件。
√√EXTI线22:连接到RTC唤醒事件。
√√EXSTI线23:连接到LPTIM1异步事件√IO⼝外部中断STM32的每个IO都可以作为外部中断输⼊。
每个外部中断线可以独⽴的配置触发⽅式(上升沿,下降沿或者双边沿触发),触发/屏蔽,专⽤的状态位。
STM32供IO使⽤的中断线只有16个,但是STM32F系列的IO⼝多达上百个,STM32F103ZGT6(112),那么中断线怎么跟io⼝对应呢?GPIO和中断线映射关系GPIOx.0映射到EXTI0GPIOx.1映射到EXTI1……GPIOx.14映射到EXTI14GPIOx.15映射到EXTI15对于M4/M7,配置寄存器为SYSCFG_EXTIRx对于M3,配置寄存器为AFIO_EXTICRx如下图所⽰,EXTI0[3:0]有4个位,可以配置16个,所以可以从PA0选择到PI0。
也就是说16个中断线,最多可以处理16*16个外部引脚的中断。
可以在⼿册中找到SYSCFG 外部中断配置寄存器:16个中断线就分配16个中断服务函数?IO⼝外部中断在中断向量表中只分配了7个中断向量,也就是只能使⽤7个中断服务函数。
从表中可以看出,外部中断线5~ 9分配⼀个中断向量,共⽤⼀个服务函数外部中断线10~15分配⼀个中断向量,共⽤⼀个中断服务函数。
中断服务函数列表:EXTI0_IRQHandlerEXTI1_IRQHandlerEXTI2_IRQHandlerEXTI3_IRQHandlerEXTI4_IRQHandlerEXTI9_5_IRQHandlerEXTI15_10_IRQHandlerIO⼝外部中断HAL库配置⽅法外部中断操作使⽤到的函数分布⽂件stm32fxxx_hal_gpio.hstm32fxxx_hal_gpio.c外部中断配置:外部中断的中断线映射配置和触发⽅式都是在GPIO初始化函数中完成:GPIO_InitTypeDef GPIO_Initure;GPIO_Initure.Pin=GPIO_PIN_0; //PA0GPIO_Initure.Mode=GPIO_MODE_IT_RISING; //上升沿触发GPIO_Initure.Pull=GPIO_PULLDOWN;HAL_GPIO_Init(GPIOA,&GPIO_Initure);void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init){uint32_t position;uint32_t ioposition = 0x00;uint32_t iocurrent = 0x00;uint32_t temp = 0x00;/* Check the parameters */assert_param(IS_GPIO_ALL_INSTANCE(GPIOx));assert_param(IS_GPIO_PIN(GPIO_Init->Pin));assert_param(IS_GPIO_MODE(GPIO_Init->Mode));assert_param(IS_GPIO_PULL(GPIO_Init->Pull));/* Configure the port pins */for(position = 0; position < GPIO_NUMBER; position++){/* Get the IO position */ioposition = ((uint32_t)0x01) << position;/* Get the current IO position */iocurrent = (uint32_t)(GPIO_Init->Pin) & ioposition;if(iocurrent == ioposition){/*--------------------- GPIO Mode Configuration ------------------------*//* In case of Alternate function mode selection */if((GPIO_Init->Mode == GPIO_MODE_AF_PP) || (GPIO_Init->Mode == GPIO_MODE_AF_OD)){/* Check the Alternate function parameter */assert_param(IS_GPIO_AF(GPIO_Init->Alternate));/* Configure Alternate function mapped with the current IO */temp = GPIOx->AFR[position >> 3];temp &= ~((uint32_t)0xF << ((uint32_t)(position & (uint32_t)0x07) * 4)) ;temp |= ((uint32_t)(GPIO_Init->Alternate) << (((uint32_t)position & (uint32_t)0x07) * 4));GPIOx->AFR[position >> 3] = temp;}/* Configure IO Direction mode (Input, Output, Alternate or Analog) */temp = GPIOx->MODER;temp &= ~(GPIO_MODER_MODER0 << (position * 2));temp |= ((GPIO_Init->Mode & GPIO_MODE) << (position * 2));GPIOx->MODER = temp;/* In case of Output or Alternate function mode selection */if((GPIO_Init->Mode == GPIO_MODE_OUTPUT_PP) || (GPIO_Init->Mode == GPIO_MODE_AF_PP) || (GPIO_Init->Mode == GPIO_MODE_OUTPUT_OD) || (GPIO_Init->Mode == GPIO_MODE_AF_OD)) {/* Check the Speed parameter */assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));/* Configure the IO Speed */temp = GPIOx->OSPEEDR;temp &= ~(GPIO_OSPEEDER_OSPEEDR0 << (position * 2));temp |= (GPIO_Init->Speed << (position * 2));GPIOx->OSPEEDR = temp;/* Configure the IO Output Type */temp = GPIOx->OTYPER;temp &= ~(GPIO_OTYPER_OT_0 << position) ;temp |= (((GPIO_Init->Mode & GPIO_OUTPUT_TYPE) >> 4) << position);GPIOx->OTYPER = temp;}/* Activate the Pull-up or Pull down resistor for the current IO */temp = GPIOx->PUPDR;temp &= ~(GPIO_PUPDR_PUPDR0 << (position * 2));temp |= ((GPIO_Init->Pull) << (position * 2));GPIOx->PUPDR = temp;/*--------------------- EXTI Mode Configuration ------------------------*//* Configure the External Interrupt or event for the current IO */if((GPIO_Init->Mode & EXTI_MODE) == EXTI_MODE){/* Enable SYSCFG Clock */__HAL_RCC_SYSCFG_CLK_ENABLE();temp = SYSCFG->EXTICR[position >> 2];temp &= ~(((uint32_t)0x0F) << (4 * (position & 0x03)));temp |= ((uint32_t)(GPIO_GET_INDEX(GPIOx)) << (4 * (position & 0x03)));SYSCFG->EXTICR[position >> 2] = temp;/* Clear EXTI line configuration */temp = EXTI->IMR;temp &= ~((uint32_t)iocurrent);if((GPIO_Init->Mode & GPIO_MODE_IT) == GPIO_MODE_IT){temp |= iocurrent;}EXTI->IMR = temp;temp = EXTI->EMR;temp &= ~((uint32_t)iocurrent);if((GPIO_Init->Mode & GPIO_MODE_EVT) == GPIO_MODE_EVT){temp |= iocurrent;}EXTI->EMR = temp;/* Clear Rising Falling edge configuration */temp = EXTI->RTSR;temp &= ~((uint32_t)iocurrent);if((GPIO_Init->Mode & RISING_EDGE) == RISING_EDGE){temp |= iocurrent;}EXTI->RTSR = temp;temp = EXTI->FTSR;temp &= ~((uint32_t)iocurrent);if((GPIO_Init->Mode & FALLING_EDGE) == FALLING_EDGE){temp |= iocurrent;}EXTI->FTSR = temp;}}}}和串⼝中断⼀样,HAL库同样提供了外部中断通⽤处理函数HAL_GPIO_EXTI_IRQHandler,我们在外部中断服务函数中会调⽤该函数处理中断。
stm32中断(NVIC与EXTI)
stm32中断(NVIC与EXTI) D部有4个从优先级(00 01 10 11)。
1.中断输入与悬起当中断输入脚被置为有效后,该中断就被“悬起”。
所谓“悬起”,也就是等待、就绪的意思。
即使后来中断源撤消了中断请求,已经被标记成悬起的中断也被记录下来。
当某中断的服务程序开始执行时,就称此中断进入了“活跃”状态,并且其悬起位会被硬件自动清除。
在一个中断活跃后,直到其服务例程执行完毕,并且返回后,才能对该中断的新请求予以响应。
当NVIC响应一个中断时,会自动完成以下三项工作,以便安全、准确地跳转到相应的中断服务程序:入栈:把8个寄存器的值压入栈。
当响应中断时,如果当前的代码正在使用PSP,则压入PSP(进程堆栈),否则就压入MSP(主堆栈)。
一旦进入了服务例程,就一直使用主堆栈。
在自动入栈的过程中,将寄存器写入堆栈的顺序与时间顺序无关,CM3会保证正确的寄存器被保存到正确的位置。
取向量:当数据总线(系统总线)进行入栈操作时,指令总线(I-Code总线)正在从向量表中找出正确的中断向量与对应的服务程序入口地址。
更新寄存器。
注意:①如果在某个中断得到响应之前,其悬起状态被清除了,则中断被取消。
②新请求在得到响应时,由硬件自动清零其悬起标志位。
③如果中断源咬住请求信号不放,该中断就会在其上次服务例程返回后再次被置为悬起状态。
④如果某个中断在得到响应之前,其请求信号以若干的脉冲的方式呈现,则被视为只有一次中断请求⑤如果在服务例程执行时,中断请求释放了,但是在服务例程返回前又重新被置为有效,则NVIC会记住此动作,重新悬起该中断。
2.中断返回当中断完成,返回主程序时,NVIC自动完成以下两步:①出栈:先前压入栈中的寄存器在这里恢复。
内部的出栈顺序与入栈时的相对应,堆栈指针的值也改回先前的值。
②更新NVIC 寄存器:伴随着中断的返回,它的活动位也被硬件清除。
对于外部中断,倘若中断输入再次被置为有效,则悬起位也将再次置位,新一次的中断响应序列也会再次开始。
STM32串口死机现象经验分享
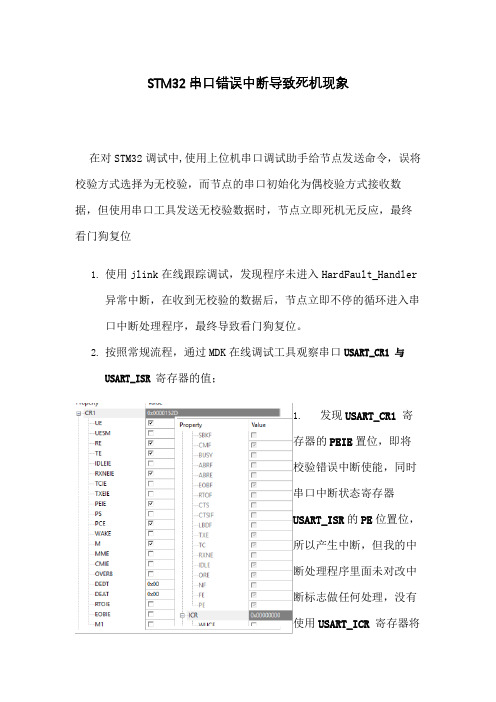
STM32串口错误中断导致死机现象在对STM32调试中,使用上位机串口调试助手给节点发送命令,误将校验方式选择为无校验,而节点的串口初始化为偶校验方式接收数据,但使用串口工具发送无校验数据时,节点立即死机无反应,最终看门狗复位1.使用jlink在线跟踪调试,发现程序未进入HardFault_Handler异常中断,在收到无校验的数据后,节点立即不停的循环进入串口中断处理程序,最终导致看门狗复位。
2.按照常规流程,通过MDK在线调试工具观察串口USART_CR1 与USART_ISR 寄存器的值;1.发现USART_CR1寄存器的PEIE置位,即将校验错误中断使能,同时串口中断状态寄存器USART_ISR的PE位置位,所以产生中断,但我的中断处理程序里面未对改中断标志做任何处理,没有使用USART_ICR寄存器将PE的中断标志位清除,当退出中断后,STM32会立即再次进入串口中断。
2.这种现象是因为串口配置为偶校验,但收到无校验的串口数据时,数据校验失败同时PEIE位置1从而导致进入串口中断处理程序。
3.采用两种办法解决该问题:将USART_CR1寄存器的PEIE的使能标志位清楚,或者在中断处理程序里面退出之前的时候,将使用USART_ICR寄存器将USART_ISR的PE中断标志位清除,最终测试后问题得到解决1.但是在另外的串口测试中,使用上位机通过串口不停的向节点发送数据,中途手动将串口的硬件连接断开一段时间后再连接,有时候在将断开的串口连接再次连接上时,设备又会循环进入串口中断,最终导致设备的看门狗复位;2.再次通过在线调试观察串口寄存器,发现上面的PEIE已经被置零,说明该中断使能已经被关闭,不是上面提到的校验错误引起的中断;3.最终查看STM32F071的官方参考手册,在看到CR3寄存器上看到如下说明EIE位:错误中断使能控制,该位如果置1时,当USART_ISR的FE或ORE或NF其中一个置位时都将产生中断,FE位:帧错误位标志,当检测到同步错误或过多的噪声或break符;ORE:过载错误标志;NF:噪声错误标志;1.在线调试观察CR3寄存器的EIE位被置位,同时在异常的循环进入串口中断时观察中断状态标志位发现以上三个标志位中存在置位的情况,当初对该EIE标志位的使能未重视;2.最后跟源代码发现在串口的初始化中奖上面的两个中断使能位PEIE与EIE都使能;屏蔽该代码或在中断处理程序中清楚错误标志位后均正常工作;3.该源代码是使用STM32cube工具生成的库,只使用了其串口初始化功能,但未使用工具生成的串口中断处理程序;。
stm32使用hal库进行中断处理的流程

STM32使用HAL库进行中断处理的流程1. 简介中断是嵌入式系统中常用的一种事件驱动机制,使得系统能够在执行任务的同时,及时响应重要的事件。
在STM32微控制器中,HAL库提供了一种方便的方式来进行中断处理。
本文将介绍使用HAL库进行中断处理的流程,并提供相应的代码示例。
2. 初始化中断控制器在使用HAL库进行中断处理之前,首先需要初始化中断控制器。
这可以通过调用HAL_NVIC_SetPriority()和HAL_NVIC_EnableIRQ()函数来实现。
以下是初始化中断控制器的示例代码:// 初始化中断控制器void init_interrupt_controller(){// 设置中断优先级HAL_NVIC_SetPriority(IRQn_Type IRQn, uint32_t PreemptPriority, uint 32_t SubPriority);// 使能中断HAL_NVIC_EnableIRQ(IRQn_Type IRQn);}在示例代码中,IRQn_Type是中断号,PreemptPriority是抢占优先级,SubPriority是子优先级。
3. 编写中断处理函数使用HAL库进行中断处理时,需要编写相应的中断处理函数。
中断处理函数要按照一定的格式进行编写,以便与中断向量表关联。
以下是编写中断处理函数的示例代码:// 中断处理函数void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){// 中断处理代码// ...}在示例代码中,HAL_GPIO_EXTI_Callback是GPIO外部中断的中断处理函数。
根据不同的中断源和外设,中断处理函数的名称可能会有所不同。
4. 配置中断触发条件在使用HAL库进行中断处理时,需要配置中断触发条件。
这可以通过调用HAL_GPIO_Init()函数来实现。
以下是配置中断触发条件的示例代码:// 配置中断触发条件void configure_interrupt_trigger(){GPIO_InitTypeDef GPIO_InitStruct;// 配置GPIO引脚GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; // 上升沿触发GPIO_InitStruct.Pull = GPIO_PULLDOWN;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);// 配置中断线HAL_NVIC_SetPriority(EXTI0_IRQn, 0, 0); // 设置中断优先级HAL_NVIC_EnableIRQ(EXTI0_IRQn); // 使能中断线}在示例代码中,我们配置了GPIO引脚为上升沿触发,并设置了中断优先级。
stm32外部中断实验原理
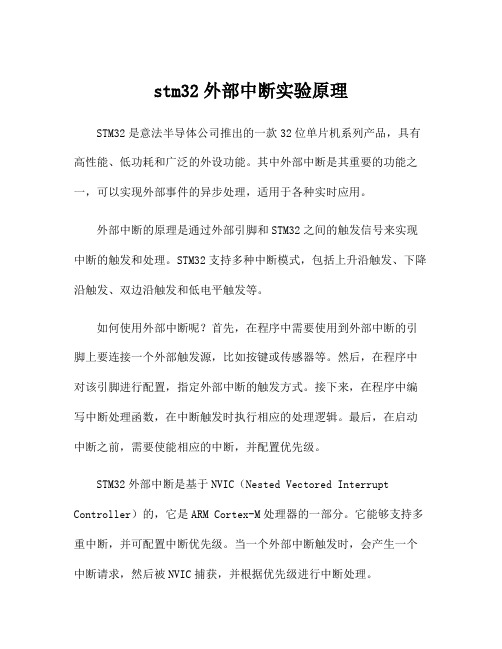
stm32外部中断实验原理STM32是意法半导体公司推出的一款32位单片机系列产品,具有高性能、低功耗和广泛的外设功能。
其中外部中断是其重要的功能之一,可以实现外部事件的异步处理,适用于各种实时应用。
外部中断的原理是通过外部引脚和STM32之间的触发信号来实现中断的触发和处理。
STM32支持多种中断模式,包括上升沿触发、下降沿触发、双边沿触发和低电平触发等。
如何使用外部中断呢?首先,在程序中需要使用到外部中断的引脚上要连接一个外部触发源,比如按键或传感器等。
然后,在程序中对该引脚进行配置,指定外部中断的触发方式。
接下来,在程序中编写中断处理函数,在中断触发时执行相应的处理逻辑。
最后,在启动中断之前,需要使能相应的中断,并配置优先级。
STM32外部中断是基于NVIC(Nested Vectored Interrupt Controller)的,它是ARM Cortex-M处理器的一部分。
它能够支持多重中断,并可配置中断优先级。
当一个外部中断触发时,会产生一个中断请求,然后被NVIC捕获,并根据优先级进行中断处理。
在硬件层面上,外部中断将通过外部中断控制器(EXTI)和GPIO控制器进行连接。
外部中断的引脚通过GPIO控制器配置为中断模式,并通过EXTI控制器与NVIC连接。
当外部触发源产生中断信号时,通过GPIO控制器将该中断信号传递给EXTI控制器,然后触发中断处理。
在软件编程方面,首先需要对GPIO和EXTI进行相应的初始化配置。
对于GPIO,我们需要设置引脚的模式、速度和上下拉等参数。
对于EXTI,我们需要设置中断触发方式(例如上升沿触发)和中断屏蔽(可以选择屏蔽或非屏蔽中断)等。
接着,使用STM32提供的库函数进行中断处理的配置。
首先,我们需要使用NVIC_Init函数来配置NVIC,使能相应的中断和设置中断优先级。
然后,使用EXTI_Init函数设置外部中断的触发方式和屏蔽等。
最后,编写中断处理函数,当外部中断触发时进行相应的处理。
stm32寄存器版学习笔记定时计数器中断
stm32寄存器版学习笔记定时计数器中断STM32共有8个定时计数器,⾼级定时器: TIME1 TIME8是通⽤定时器:TIME2~TIME5基本定时器: TIME6和TIME7以TIME3通⽤定时器为例总结定时计数器的基本⽤法⼀:TIM3时钟使能APB1外设时钟使能寄存器(RCC_APB1ENR)Eg:RCC->APB1ENR|=1<<1; //使能TIM3时钟⼆:设置TIM3_ARR和TIM3_PSC的值通过这两个寄存器来设置⾃动重装的值以及分频系数⾃动重装载寄存器(TIMx_ARR)预分频器(TIMx_PSC)三:设置TIM3_DIER允许更新中断中断使能寄存器(TIMx_DIER)Eg: TIM3->DIER|=1<<0; //允许更新中断四:允许TIM3⼯作控制寄存器1(TIMx_CR1)CEN:使能计数器位0 0:禁⽌计数器; 1:使能计数器Eg: TIM3->CR1|=0x01; //使能定时器3 或 TIM3->CR1|=1<<0;五:TIM3中断分组设置直接调⽤MY_NVIC_Init()函数Eg:MY_NVIC_Init(1,3,TIM3_IRQChannel,2);//抢占1,⼦优先级3,组2六:编写中断服务函数状态寄存器(TIMx_SR)Eg: if(TIM3->SR&0X0001)//溢出中断Eg: //定时器3中断服务程序 void TIM3_IRQHandler(void) //TIM3_Int_Init(5000,7199); //10Khz的计数频率,计数到5000为500ms//500ms中断⼀次 { if(TIM3->SR&0X0001) //溢出中断 { //add your code } TIM3->SR&=~(1<<0); //清除中断标志位 }六:关于溢出事件的计算因为Stm32_Clock_Init函数⾥⾯已经初始化APB1的时钟为2分频,所以APB1的时钟是32MHz(系统时钟72MHz)。
STM32HAL库使用中断实现串口接收不定长数据

STM32HAL库使用中断实现串口接收不定长数据要在STM32HAL库中实现串口接收不定长数据超过1200字,您可以使用中断来接收。
以下是一个简单的示例代码,演示了如何设置串口接收中断,并处理超过1200个字的数据:```c#include "stm32xxxx.h" // 根据您的STM32型号进行包含适当的头文件#define RX_BUFFER_SIZE 2000 // 定义接收缓冲区的大小//定义接收缓冲区和相关变量uint8_t rxBuffer[RX_BUFFER_SIZE];volatile uint16_t rxIndex = 0;volatile uint8_t rxDataAvailable = 0;//初始化串口void UART_Ini//串口GPIO引脚配置//串口时钟配置//串口配置//使能接收中断__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);//中断处理函数void USART1_IRQHandler(void)if ((__HAL_UART_GET_FLAG(&huart1, UART_FLAG_RXNE) != RESET)) rxBuffer[rxIndex++] = huart1.Instance->DR;if (rxIndex >= RX_BUFFER_SIZE)//接收超过1200字,进行处理//在这里添加您的处理代码//重置接收缓冲区和相关变量rxIndex = 0;rxDataAvailable = 0;} else//未达到1200字,继续接收rxDataAvailable = 1;}}int main(void)//初始化硬件//...//初始化串口UART_Init(;while (1)if (rxDataAvailable)//执行接收数据处理//在这里添加您的处理代码//重置接收缓冲区和相关变量rxIndex = 0;rxDataAvailable = 0;}//执行其他任务//...}```在上述代码中,我们首先定义了一个接收缓冲区 `rxBuffer`,并使用 `rxIndex` 变量来跟踪接收到的字节数。
STM32 硬件IIC中断使用方法

STM32 硬件IIC中断使用方法--中北大学:马政贵本文详细描述了STM32硬件IIC的中断使用方法,包含流程图和对应代码,以及调试过程中的问题记录和分析解决。
之前,一直听说STM32的硬件IIC有问题,加之以前写好的模拟IIC模块用着一直没问题,就没有去使用STM32的硬件IIC。
后面项目中需要实时读取三个传感器的数据,三个传感器并在一起共用一个IIC口,通过地址进行区分通信,一个传感器要读取8字节数据。
采用模拟IIC方式,很多时间都浪费在高低电平的等待时间上,导致其他任务时间很紧迫。
于是想到使用硬件IIC的中断方式,来提升效率。
查看了下库自带的例程,使用的是查询方式,使用了大量的while来等待状态标志完成。
移植过来,虽然可以跑通,但使用的是查询方式,效率本质上和模拟IIC是一样的。
于是自己便把手册里的IIC模块看了一遍,自己根据手册来写硬件IIC的中断模式。
上图是传感器的通讯时序,属于标准的IIC通信,这里不做进一步展开,详细可以参看IIC总线规范。
应用中,MCU做主机,传感器做从机。
MCU先工作在主发送器模式,然后工作在主接收器模式。
在默认状态下,MCU接口工作于从模式。
接口在生成起始条件后自动地从从模式切换到主模式;当仲裁丢失或产生停止信号时,则从主模式切换到从模式。
在应用手册中,详细给出了IIC主模式的操作要求及顺序:这里需要注意的是怎样结束通信,然后重启通信,以便获取下一个传感器的数据。
应用手册根据情况分为了三种,我这里使用的是第一种方式,也就是把IIC的中断优先级设置为最高。
下面我以流程图的方式,把整个过程表示出来,然后再据此给出相应的代码,代码在中断中以状态机的方式进行。
先进行IIC管脚GPIO的配置:接着进行IIC的配置(中断先不使能,在初始化完传感器之后再使能。
我这里把IIC的事件中断优先级设置为最高,若不是,IIC的结束操作需参照应用手册中相应的情况进行):中断中的状态机如下:void I2C2_EV_IRQHandler(void){switch(IIC2_State){case 0:if(I2C_GetINTStatus(I2C2, I2C_INT_STARTF)){I2C_ClearITPendingBit(I2C2, I2C_INT_STARTF);(void)(I2C2->STS1);I2C_Send7bitAddress(I2C2, ALS31300_ADR[IIC_Device], I2C_Direction_Transmit);IIC2_State++;}else{I2C2->STS1 = 0;}break;case 1:if(I2C_GetINTStatus(I2C2, I2C_INT_ADDRF)){I2C_ClearITPendingBit(I2C2, I2C_INT_ADDRF);(void)(I2C2->STS1);(void)(I2C2->STS2);I2C_SendData(I2C2, 0x28);IIC2_State++;}else{I2C2->STS1 = 0;}break;case 2:if(I2C_GetINTStatus(I2C2, I2C_INT_TDE)){I2C_ClearITPendingBit(I2C2, I2C_INT_TDE);I2C_ClearITPendingBit(I2C2, I2C_INT_BTFF);(void)(I2C2->STS1);I2C_GenerateSTART(I2C2, ENABLE); /* Send STRAT condition a second time */IIC2_State++;}else{I2C2->STS1 = 0;}break;case 3:if(I2C_GetINTStatus(I2C2, I2C_INT_STARTF)){I2C_ClearITPendingBit(I2C2, I2C_INT_STARTF);(void)(I2C2->STS1);I2C_Send7bitAddress(I2C2, ALS31300_ADR[IIC_Device],I2C_Direction_Receive);IIC2_State++;}else{I2C2->STS1 = 0;}break;case 4:if(I2C_GetINTStatus(I2C2, I2C_INT_ADDRF)){I2C_ClearITPendingBit(I2C2, I2C_INT_ADDRF);(void)(I2C2->STS1);(void)(I2C2->STS2);IIC2_State++;}else{I2C2->STS1 = 0;}break;case 5:if(I2C_GetINTStatus(I2C2, I2C_INT_RDNE)){I2C_ClearITPendingBit(I2C2, I2C_INT_RDNE);(void)(I2C2->STS1);ALS31300_Reg_Data[IIC_Device][IIC_Rec_Num] = I2C_ReceiveData(I2C2);IIC_Rec_Num++;if(IIC_Rec_Num >= 6){IIC2_State++;}}else{I2C2->STS1 = 0;}break;case 6:if(I2C_GetINTStatus(I2C2, I2C_INT_RDNE)){I2C_ClearITPendingBit(I2C2, I2C_INT_RDNE);(void)(I2C2->STS1);ALS31300_Reg_Data[IIC_Device][IIC_Rec_Num] = I2C_ReceiveData(I2C2);I2C_AcknowledgeConfig(I2C2, DISABLE);I2C_GenerateSTOP(I2C2, ENABLE);IIC_Rec_Num++;IIC2_State++;}else{I2C2->STS1 = 0;}break;case 7:if(I2C_GetINTStatus(I2C2, I2C_INT_RDNE)){I2C_ClearITPendingBit(I2C2, I2C_INT_RDNE);(void)(I2C2->STS1);ALS31300_Reg_Data[IIC_Device][IIC_Rec_Num] =I2C_ReceiveData(I2C2);IIC_Device++;if(IIC_Device >= 3){IIC_Device = 0;IIC_Rec_OK = 1;}I2C_AcknowledgeConfig(I2C2, ENABLE);I2C_GenerateSTART(I2C2, ENABLE);IIC_Rec_Num = 0;IIC2_State = 0;}else{I2C2->STS1 = 0;}break;default:I2C2->STS1 = 0;break;}}初始化之后,产生开始信号之后,使能中断,此后就一直在中断的状态机中往复进行了:#define IIC_TIMEOUT 1000IIC2_GPIO_Config();IIC2_Config();time_count = IIC_TIMEOUT;while(I2C_GetFlagStatus(I2C2, I2C_FLAG_BUSYF)){time_count--;if(0 == time_count){IIC_Wrong_Count++;return;}}I2C_AcknowledgeConfig(I2C2, ENABLE);I2C_GenerateSTART(I2C2, ENABLE);//初始化之后再开中断,只在读操作中使用中断I2C_INTConfig(I2C2, I2C_INT_EVT | I2C_INT_BUF | I2C_INT_ERR, ENABLE);编译调试,咦,状态机一直停留在0状态,也就是卡在总线一直BUSY。
stm32中断优先级的处理原则
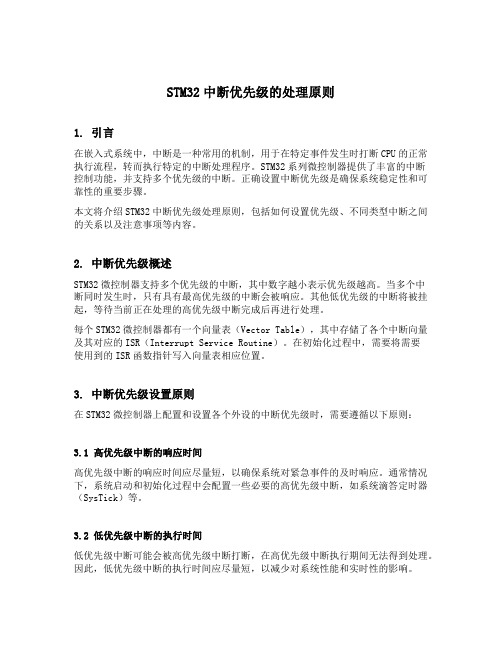
STM32中断优先级的处理原则1. 引言在嵌入式系统中,中断是一种常用的机制,用于在特定事件发生时打断CPU的正常执行流程,转而执行特定的中断处理程序。
STM32系列微控制器提供了丰富的中断控制功能,并支持多个优先级的中断。
正确设置中断优先级是确保系统稳定性和可靠性的重要步骤。
本文将介绍STM32中断优先级处理原则,包括如何设置优先级、不同类型中断之间的关系以及注意事项等内容。
2. 中断优先级概述STM32微控制器支持多个优先级的中断,其中数字越小表示优先级越高。
当多个中断同时发生时,只有具有最高优先级的中断会被响应。
其他低优先级的中断将被挂起,等待当前正在处理的高优先级中断完成后再进行处理。
每个STM32微控制器都有一个向量表(Vector Table),其中存储了各个中断向量及其对应的ISR(Interrupt Service Routine)。
在初始化过程中,需要将需要使用到的ISR函数指针写入向量表相应位置。
3. 中断优先级设置原则在STM32微控制器上配置和设置各个外设的中断优先级时,需要遵循以下原则:3.1 高优先级中断的响应时间高优先级中断的响应时间应尽量短,以确保系统对紧急事件的及时响应。
通常情况下,系统启动和初始化过程中会配置一些必要的高优先级中断,如系统滴答定时器(SysTick)等。
3.2 低优先级中断的执行时间低优先级中断可能会被高优先级中断打断,在高优先级中断执行期间无法得到处理。
因此,低优先级中断的执行时间应尽量短,以减少对系统性能和实时性的影响。
STM32微控制器支持不同外设之间和相同外设内部的中断嵌套。
在设置嵌套中断时,需要注意以下原则: - 外设之间:不同外设之间的中断嵌套顺序应根据具体需求和业务逻辑进行设置。
- 外设内部:在具有多个可触发相同类型中断源的外设上,需要根据业务需求设置不同源之间的触发次序。
3.4 中断抢占与屏蔽STM32微控制器支持中断的抢占和屏蔽功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0xE000E410 0xE000E411 0xE000E412 0xE000E413 0xE000E414
DMAChannel6_IRQHandler
bit:5 bit:6 bit:7 bit:8 bit:9 bit:10
RCC_IRQ Channel ((u8)0x05) /* RCC global Interrupt */
EXTI0_IRQ Channel ((u8)0x06) /* EXTI Line0 Interrupt */
EXTI1_IRQ Channel ((u8)0x07) /* EXTI Line1 Interrupt */
TIM1_TRG_COM_IRQHandler TIM1_CC_IRQHandler TIM2_IRQHandler TIM3_IRQHandler TIM4_IRQHandler
bit:26 bit:27 bit:28 bit:29 bit:30
TIM1_TRG _COM_IR QChannel ((u8)0x1A) /* TIM1 Trigger and Commutati on Interrupt */ TIM1_CC_I RQChanne l ((u8)0x1B) /* TIM1 Capture Compare Interrupt */
EXTI15_10 _IRQChan nel ((u8)0x28) /* External Line[15:10] Interrupts */
0xE000E429
0xE000E42A 0xE000E42B 0xE000E42C
RTCAlarm_IRQHandler USBWakeUp_IRQHandler
0xE000E40B 0xE000E40C 0xE000E40D 0xE000E40E 0xE000E40F
DMAChannel1_IRQHandler DMAChannel2_IRQHandler DMAChannel3_IRQHandler DMAChannel4_IRQHandler DMAChannel5_IRQHandler
DMA1_Ch annel3_IR QChannel ((u8)0x0D) /* DMA1 Channel 3 global Interrupt */
DMA1_Ch annel4_IR QChannel ((u8)0x0E) /* DMA1 Channel 4 global Interrupt */
bit:11 bit:12 bit:13 bit:14 bit:15
DMA1_Ch annel1_IR QChannel ((u8)0x0B) /* DMA1 Channel 1 global Interrupt */
DMA1_Ch annel2_IR QChannel ((u8)0x0C) /* DMA1 Channel 2 global Interrupt */
中断函数名(具体查看stm启动文件)
I2C1_ER_IRQHandler
bit:0
I2C2_EV_IRQHandler
bit:1
I2C2_ER_IRQHandler
bit:2
I2C1_ER_I RQChanne l ((u8)0x20) /* I2C1 Error Interrupt */
I2C2_EV_I RQChanne l ((u8)0x21) /* I2C2 Event Interrupt */
PVD_IRQHandler
0xE000E402
TAMPER_IRQHandler
bit:1 bit:2
PVD_IRQC hannel ((u8)0x01) /* PVD through EXTI Line detection Interrupt */
TAMPER_I RQChanne l ((u8)0x02) /* Tamper Interrupt */
SPI2_IRQHandler USART1_IRQHandler USART2_IRQHandler USART3_IRQHandler EXTI15_10_IRQHandler
bit:4 bit:5 bit:6 bit:7 bit:8
SPI2_IRQ Channel ((u8)0x24) /* SPI2 global Interrupt */
寄存器相应位置1,中断使能
中断优先寄存器地址 寄存器地址:
0x4000E100
中断函数名(具体查看stm启动文件)
0xE000E400
WWDG_IRQHandler
bit:0
WWDG_IR QChannel ((u8)0x00) /* Window WatchDog Interrupt */
0xE000E401
TIM1_BRK _IRQChan nel ((u8)0x18) /* TIM1 Break Interrupt */ TIM1_UP_I RQChanne l ((u8)0x19) /* TIM1 Update Interrupt */
0xE000E41A 0xE000E41B 0xE000E41C 0xE000E41D 0xE000E41E
bit:16
DMAChannel7_IRQHandler
bit:17
ADC_IRQHandler
bit:18
USB_HP_CAN_TX_IRQHandler
bit:19
USB_LP_CAN_RX0_IRQHandler bit:20
DMA1_Ch annel6_IR QChannel ((u8)0x10) /* DMA1 Channel 6 global Interrupt */
0xE000E432 0xE000E433 0xE000E434 0xE000E435 0xE000E436 0xE000E437
bit:18 bit:19 bit:20 bit:21 bit:22 bit:23
0xE000E41F
I2C1_EV_IRQHandler
bit:31
I2C1_EV_I RQChanne l ((u8)0x1F) /* I2C1 Event Interrupt */
中断优先寄存器地址 0xE000E420 0xE000E421 0xE000E422
寄存器地址:
0x4000E104
0xE000E403
RTC_IRQHandler
bit:3
RTC_IRQ Channel ((u8)0x03) /* RTC global Interrupt */
0xE000E404
FLASH_IRQHandler
bit:4
FLASH_IR QChannel ((u8)0x04) /* FLASH global Interrupt */
TIM8_BRK _IRQChan nel ((u8)0x2B) /* TIM8 Break Interrupt */ TIM8_UP_I RQChanne l ((u8)0x2C) /* TIM8 Update Interrupt */
0xE000E42D 0xE000E42E 0xE000E42F 0xE000E430 0xE000E431
USART1_I RQChanne l ((u8)0x25) /* USART1 global Interrupt */
USART2_I RQChanne l ((u8)0x26) /* USART2 global Interrupt */
USART3_I RQChanne l ((u8)0x27) /* USART3 global Interrupt */
bit:21 bit:22 bit:23 bit:24 bit:25
CAN_RX1_ IRQChann el ((u8)0x15) /* CAN RX1 Interrupt */
CAN_SCE _IRQChan nel ((u8)0x16) /* CAN SCE Interrupt */ EXTI9_5_I RQChanne l ((u8)0x17) /* External Line[9:5] Interrupts
bit:13 bit:14 bit:15 bit:16 bit:17
TIM8_TRG _COM_IR QChannel ((u8)0x2D) /* TIM8 Trigger and Commutati on Interrupt */ TIM8_CC_I RQChanne l ((u8)0x2E) /* TIM8 Capture Compare Interrupt */
TIM2_IRQ Channel ((u8)0x1C) /* TIM2 global Iቤተ መጻሕፍቲ ባይዱterrupt */
TIM3_IRQ Channel ((u8)0x1D) /* TIM3 global Interrupt */
TIM4_IRQ Channel ((u8)0x1E) /* TIM4 global Interrupt */
0xE000E405
RCC_IRQHandler
0xE000E406
EXTI0_IRQHandler
0xE000E407
EXTI1_IRQHandler
0xE000E408
EXTI2_IRQHandler
0xE000E409
EXTI3_IRQHandler
0xE000E40A
EXTI4_IRQHandler
USB_LP_C AN_RX0_I RQChanne l ((u8)0x14) /* USB Low Priority or CAN RX0
0xE000E415 0xE000E416 0xE000E417 0xE000E418 0xE000E419