无定向导线计算
无定向角导线在导线测量中的应用
无定向角导线在导线测量中的应用摘要:本文主要论述在控制点不能通视(无定向条件)的情况下导线测量计算问题,并以工程实例进行说明。
前言:现在城市建设飞速发展,尤其象上海这样的国际化大都市,高楼大厦向雨后春笋一样冒出,这可能使的原有的控制点变的不再通视,这样就没有了推算各导线边方位角所必须的定向角,无法进行导线计算。
本论文就是介绍一种当两控制点无法通视时的计算方法。
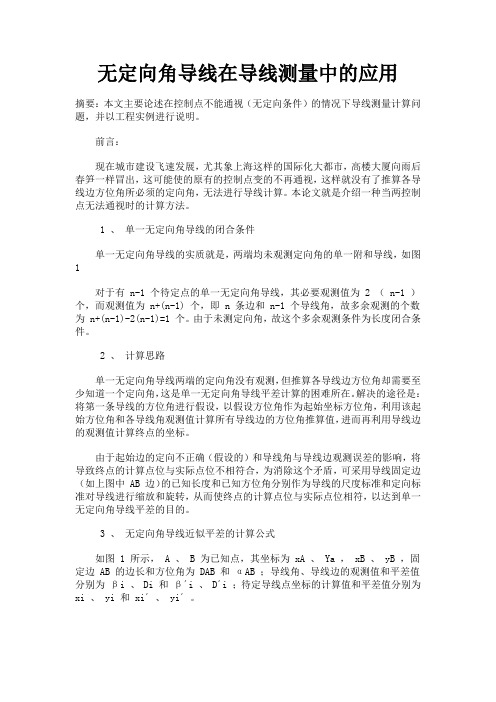
1 、单一无定向角导线的闭合条件单一无定向角导线的实质就是,两端均未观测定向角的单一附和导线,如图1对于有 n-1 个待定点的单一无定向角导线,其必要观测值为 2 ( n-1 )个,而观测值为 n+(n-1) 个,即 n 条边和 n-1 个导线角,故多余观测的个数为 n+(n-1)-2(n-1)=1 个。
由于未测定向角,故这个多余观测条件为长度闭合条件。
2 、计算思路单一无定向角导线两端的定向角没有观测,但推算各导线边方位角却需要至少知道一个定向角,这是单一无定向角导线平差计算的困难所在。
解决的途径是:将第一条导线的方位角进行假设,以假设方位角作为起始坐标方位角,利用该起始方位角和各导线角观测值计算所有导线边的方位角推算值,进而再利用导线边的观测值计算终点的坐标。
由于起始边的定向不正确(假设的)和导线角与导线边观测误差的影响,将导致终点的计算点位与实际点位不相符合,为消除这个矛盾,可采用导线固定边(如上图中 AB 边)的已知长度和已知方位角分别作为导线的尺度标准和定向标准对导线进行缩放和旋转,从而使终点的计算点位与实际点位相符,以达到单一无定向角导线平差的目的。
3 、无定向角导线近似平差的计算公式如图 1 所示, A 、 B 为已知点,其坐标为 xA 、 Ya , xB 、 yB ,固定边 AB 的边长和方位角为 DAB 和αAB ;导线角、导线边的观测值和平差值分别为βi 、 Di 和β´i 、D´i ;待定导线点坐标的计算值和平差值分别为xi 、 yi 和xi´ 、yi´ 。
无定向导线精度
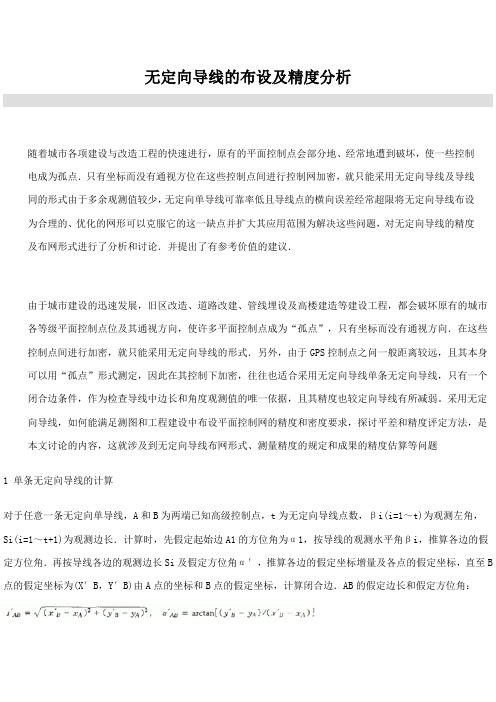
无定向导线的布设及精度分析随着城市各项建设与改造工程的快速进行,原有的平面控制点会部分地、经常地遭到破坏,使一些控制电成为孤点.只有坐标而没有通视方位在这些控制点间进行控制网加密,就只能采用无定向导线及导线同的形式由于多余观测值较少,无定向单导线可靠率低且导线点的横向误差经常超限将无定向导线布设为合理的、优化的网形可以克服它的这一缺点并扩大其应用范围为解决这些问题,对无定向导线的精度及布网形式进行了分析和讨论.并提出了有参考价值的建议.由于城市建设的迅速发展,旧区改造、道路改建、管线埋设及高楼建造等建设工程,都会破坏原有的城市各等级平面控制点位及其通视方向,使许多平面控制点成为“孤点”,只有坐标而没有通视方向.在这些控制点间进行加密,就只能采用无定向导线的形式.另外,由于GPS控制点之问一般距离较远,且其本身可以用“孤点”形式测定,因此在其控制下加密,往往也适合采用无定向导线单条无定向导线,只有一个闭合边条件,作为检查导线中边长和角度观测值的唯一依据,且其精度也较定向导线有所减弱。
采用无定向导线,如何能满足测图和工程建设中布设平面控制网的精度和密度要求,探讨平差和精度评定方法,是本文讨论的内容,这就涉及到无定向导线布网形式、测量精度的规定和成果的精度估算等问题1 单条无定向导线的计算对于任意一条无定向单导线,A和B为两端已知高级控制点,t为无定向导线点数,βi(i=1~t)为观测左角,Si(i=1~t+1)为观测边长.计算时,先假定起始边A1的方位角为α1,按导线的观测水平角βi,推算各边的假定方位角.再按导线各边的观测边长Si及假定方位角α′,推算各边的假定坐标增量及各点的假定坐标,直至B 点的假定坐标为(X′B,Y′B)由A点的坐标和B点的假定坐标,计算闭合边.AB的假定边长和假定方位角:根据A和B两点的已知坐标,可以计算闭合边AB的真边长S AB和真方位角αAB,根据真、假闭台边长和方位角,计算真假闭合边长度比R和方位角差△α:闭合边长度比R为单条无定向导线观测质量检验的唯一尺度,对于某一等级导线,如果不超过规定限差,即认为检验通过.然后按R及△a改正导线各边的边长和方位角:用改正后的方位角及边长计算各边的坐标增量,最后推算各点的坐标.此时应无坐标闭合差,这可作为无定向导线计算的唯一检验。
两井定向无定向附和导线

两井定向---无定向附合导线计算任务名称:当矿区有两个立井,且两井之间在定向水平上有巷道相通并能进展测量时,就要采用两井定向。
任务描述:两井定向就是在两井筒中各挂一根垂球线〔见图〕,通过地面和井下导线将它们连接起来,从而把地面坐标系统中的平面坐标和方向传递到井下。
两井定向的外业测量与一井定向类似。
也包括投点、地面和井下连接测量,只是两井定向时每个井筒只悬挂一根钢丝,这使投点工作更为方便且缩短了占用井筒的时间。
同时,两井定向与一井定向相比,两钢丝间的距离大大增加,使投向误差明显减小。
这是两井定向的最大优点。
由于两井定向时,两根钢丝间不能直接通视,而是通过导线连接起来。
因此,在连接测量时必须测出井上、井下导线各边的边长及其连接水平角,在业计算时必须采用假定坐标系。
两井定向的数学公式及计算方法两井定向是在两个井筒各投下一个点,它们的坐标是通过地面连接导线测设后计算出来的。
而到了井下,它们之间是不能通视的,这样井下连接导线A′—1—2—3—4—B′就形成一条定向符合导线。
具体计算如下:1〕根据地面连接测量的成果,按照导线的计算方法,计算出地面两钢丝点A、B的平面坐标〔x A,y A〕、〔x B,y B〕。
2〕计算两钢丝点A、B的连线在地面坐标系统中的方位角和边长:tan y y x xαB AABB A-=-22ABD x y=∆±∆3〕以井下导线起始边A′1为x′轴,A点为坐标原点建立假定坐标系,计算井下导线各连接点在此假定坐标系中的平面坐标,设B′点的假定坐标为〔x B′,y B′〕。
4〕计算AB连线在假定坐标系中的方位角αAB′''''arctan'''B A BABB A By y yx x xα-==-5〕计算井下起始边在地面坐标系统系统中的方位角'1'AB ABαααA=-6〕然后根据'1αA和A点的地面坐标计算出井下导线各点在地面坐标系统中的坐标和方位角,最后算得悬线垂线B的坐标。
浅析无定向导线测量的简捷算法
、 . ..J ,.....
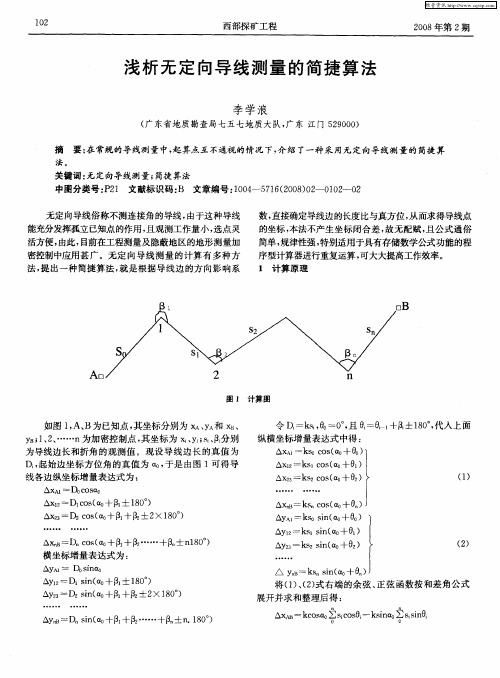
图 1 计算图
如图 1A、 , B为已知点 , 其坐标分别为 X 、A X AY和 Y; 、、 B 12 ……n为加 密控 制点 , 坐标 为 x、iS、i 其 iY;il分别 3 为导线边 长 和折 角 的观 测 值 。现 设 导 线边 长 的 真值 为 Di 始边 坐标 方位 角 的真 值 为 a, , 起 。于是 由图 1可得 导
A 1 ss ( y 一k1 i  ̄+e) l 2 n 1
A2 ss ( y =k2 i  ̄+e) } 3 n 2
… …
() 2
横坐标增量表达式为 :
△yA 一 Do i o 】 sna
l
△ yB k sn  ̄ + e ) n— s i( J
A l:D i( y2 1 n  ̄+l ±1 0) s 3 8。 1
难 。介 绍 了面向对 象与基 于像 素 的分类 方法 , 讨 了基 于 面向 对 象的 遥 感影像 的模 糊 分 类 方法 在地 探
物分类 中的新 思路 。并且 通过 了展 示利 用 eont n进 行 的 的一 个分 类 实例 , 述 了面 向对 象 的模 cg io i 阐 糊 分 类技 术 的软 件应 用。 关 键词 : 面向对 象方 法 ; 感 图像 ; 糊分 类 ;cg io 遥 模 eo nt n i 中图分类号 : 2 文 献标 识码 : 文章编 号 :O4 5 1(O 80— 00一 O P3 B 10— 76 2 0)2 13 3 对遥感 图像进 行 计算 机 分类 传 统 算 法 设 计 的 主要 面向对象的遥感图象图像模糊分类 。 依据是地物光谱数据, 统计模式是以像素作为识别的基 1 基 于面 向对象 的分 类方 法 本单元 , 依靠不 同光谱数据 组合 在统 计上 的差 别来 进行 遥感 是 2 0世纪 6 代 发 展起 来 的对地 观 测综 合 0年 的。可见 , 传统 的分类方 法未 能充分 利用遥 感 图像 提供 性 技术 。它是应 用探 测仪 器 , 与 探 测 目标 相 接触 , 不 从 的大 小 、 形状 、 纹理 、 相邻像 素 间 的关 系 等形状 和空 间位 远处把 目标的电磁波特征记录分析以揭示出物体的特 置特 征. 。然 而影像 上地物 的形 状 和结构 信息 对于某 些 征性质及其变化, 进而完成数据更新或专家决策的综合 地物类型的分类十分重要 , 特别是针对高分辨率影像 , 性探 测技术 。2 0世纪 8 代之 后 , 0年 随着 数 字成 像技 术 高分辨率影象图上不仅地物的光谱特征更明显 , 其景观 和计算机图像处理技术的迅速发展 , 计算机解译开始被 的结构 、 形状、 纹理和细节等信息也都非常突出。B a 广泛应用。相对于 目视解译, at z 计算机解译有很高的优势 和 S hp (9 9根据高分辨率 的遥感 图象图像 的特点 性, cae1 9) 可以快速地获取地表不 同专题信息 , 大大减少 了图 提出 了面向对象 的遥 感 图 象 图像 分 类 方 法 。主要 论 述 像处理的工作量和解译时间, 提高了工作的效率。近年
最新两井定向无定向附和导线

1两井定向---无定向附合导线计算2任务名称:3当矿区有两个立井,且两井之间在定向水平上有巷道相通并能进行测量时,4就要采用两井定向。
5任务描述:6两井定向就是在两井筒中各挂一根垂球线(见图),通过地面和井下导线将它7们连接起来,从而把地面坐标系统中的平面坐标和方向传递到井下。
8两井定向的外业测量与一井定向9类似。
也包括投点、地面和井下连接10测量,只是两井定向时每个井筒只悬11挂一根钢丝,这使投点工作更为方便12且缩短了占用井筒的时间。
同时,两13井定向与一井定向相比,两钢丝间的14距离大大增加,使投向误差明显减小。
这是两井定向的最大优点。
15由于两井定向时,两根钢丝间不能直接通视,而是通过导线连接起来。
因此,16在连接测量时必须测出井上、井下导线各边的边长及其连接水平角,在内业计17算时必须采用假定坐标系。
18两井定向的数学公式及计算方法19两井定向是在两个井筒内各投下一个点,它们的坐标是通过地面连接导线测20设后计算出来的。
而到了井下,它们之间是不能通视的,这样井下连接导线A′21—1—2—3—4—B′就形成一条定向符合导线。
具体计算如下:1)根据地面连接测量的成果,按照导线的计算方法,计算出地面两钢丝点A 、22B 的平面坐标(x A ,y A )、(x B ,y B )。
232)计算两钢丝点A 、B 的连线在地面坐标系统中的方位角和边长: 24tan y y x x αB A AB B A -=- 22AB D x y =∆±∆ 253)以井下导线起始边A ′1为x ′轴,A 点为坐标原点建立假定坐标系,计算26井下导线各连接点在此假定坐标系中的平面坐标,设B ′点的假定坐标为(x B ′,27 y B ′)。
28 4)计算AB 连线在假定坐标系中的方位角αAB ′''''arctan '''B A B AB B A B y y y x x x α-==- 295)计算井下起始边在地面坐标系统系统中的方位角'1'AB AB αααA =- 306)然后根据'1αA 和A 点的地面坐标计算出井下导线各点在地面坐标系统中的31坐标和方位角,最后算得悬线垂线B 的坐标。
无定向导线的平差计算
无定向导线的平差计算在现代测量中,平差计算是一项非常重要的工作。
平差计算的目的是通过对测量数据进行处理,得到更加准确的测量结果。
在实际工作中,我们经常会遇到无定向导线的测量任务,这种情况下,如何进行平差计算就成了一个问题。
本文将介绍无定向导线的平差计算方法,以及其相关应用。
一、无定向导线的概念在测量工作中,导线是指连接测量点的线路,一般由铁丝、钢丝或者钢带等材料制成。
无定向导线是指在测量过程中,导线两端未固定在地面上,而是由测量人员手持导线进行测量。
无定向导线的测量方法适用于较短距离的测量任务,如建筑物内部的测量、地下管线的测量等。
二、无定向导线的测量误差由于无定向导线是手持的,所以其测量误差较大。
主要有以下几个方面:1. 人为误差:由于人员操作不规范或者疲劳等原因,导致导线的拉力大小不一致,导致测量误差。
2. 环境误差:如风力大、地面不平等因素,也会对导线的测量造成一定的影响。
3. 仪器误差:由于测量仪器的精度不同,也会对导线的测量造成一定的误差。
三、无定向导线的平差计算方法无定向导线的平差计算方法与定向导线有所不同。
对于定向导线,我们可以通过固定导线两端的方法,使得导线的长度和方向固定不变。
但是对于无定向导线,由于其两端未固定,所以需要采用其他方法进行平差计算。
下面介绍两种常见的无定向导线平差计算方法。
1. 均分差法均分差法是一种比较简单的无定向导线平差计算方法。
其基本思想是将导线长度均分,然后根据测量数据计算每个测量点的坐标。
具体步骤如下:(1)将导线长度均分成若干段,并记录每段长度。
(2)测量每段导线的长度和方位角。
(3)根据测量数据,计算出每个测量点的坐标。
(4)根据计算结果,进行平差处理。
均分差法的优点是简单易行,不需要过多的计算。
但是其缺点也很明显,由于没有考虑导线两端的误差,所以计算结果精度较低。
2. 最小二乘法最小二乘法是一种较为精确的无定向导线平差计算方法。
其基本思想是通过最小化误差平方和的方法,求得最优的测量结果。
Excel+VBA计算无定向导线

’ 转 后 坐 标 增 量 及 闭 合 差 旋
V X = 0: VY = 0: J = 0 L
Fo = 5 To 5 + ( rJ i— 1 女 2 — 2 )
S e 2 tp
1 2坐标 闭合 差 . f =XB—XB’ f =YB-YB’ x ;y 用导 线边 长
i = 5 。 含两高 级 点在 内的所有 导 包 线 点 数 Dm x0)A o be ()A o b i sD u l,Y 1 sD u
k
X F = D G . n e” Z E (Ra g (G”& J ) P )十 I
/ 10 8
D = C s Z ) . a g (D X o ( F + R n e ” ”& J: X )
D = 】t ) : ( :M = It X — D 1 nX n( ( ) 0
Y闭 合 差 ’ 正 数 及 改 正后 坐 标 增 量 ( 号 分 配 ) 改 反
F r J = 5 To o 5 + ( — 1 i )} 2 — 2
St p e 2
A : sF + U 一 ( / 2 — 2 J J )} 1 8
3 全部源代码
3 1模块 加载 .
Pub1c i Co t ns PI As Dou e = 3. 41 bl 1
2 B 编 程思路 V A
旋 转 角一 闭 合 差 一 闭 合 差 按 长 度 比 例 改 正 一 求 各 点坐 标 ~ 评 定精 度 。
O
Fo J = 6 r To i
2 St p e 2
U
U + D G . el J ) E (C l (,2) s
地铁测绘无定向导线计算方法
地铁测绘无定向导线计算方法地铁测绘是现代城市建设中不可或缺的重要环节,而无定向导线计算方法则是地铁测绘中的核心内容之一。
本文将详细介绍地铁测绘无定向导线的计算方法,旨在为地铁建设工作提供指导和参考。
一、什么是无定向导线在测绘工作中,导线是指用来确定测量起点和测量方向的控制线。
传统的测绘工作中,常采用有定向导线的方法,即通过已知的测量基准点来确定测量方向。
然而,在地铁建设中,有时由于各种原因(如地形复杂、道路繁忙等),无法采用有定向导线的方法进行测绘工作,这时就需要使用无定向导线的方法。
无定向导线是指在测绘工作中不依赖于已知的测量基准点,通过观测和计算,自行确定测量起点和测量方向的控制线。
地铁测绘中的无定向导线计算方法,就是针对这种情况而设计的。
二、无定向导线计算方法1. 原理概述无定向导线计算方法主要依赖于方位角的观测和计算。
方位角是指从某一点开始,顺时针或逆时针到达目标点所需要旋转的角度。
通过观测目标点与已知点的方位角,结合测量距离,可以计算出目标点与已知点之间的坐标差值。
2. 观测步骤(1)选择适当的观测基准点,并在基准点上设置控制点。
(2)测量观测点与控制点之间的距离。
(3)用测角仪观测目标点与控制点之间的方位角。
(4)记录观测结果并进行数据处理。
3. 数据处理步骤(1)根据观测结果计算出目标点与控制点之间的方位角。
(2)计算出目标点与控制点之间的水平和垂直距离。
(3)根据已知点的坐标和观测结果,计算出目标点的坐标。
(4)通过多次观测和计算,逐渐提高计算精度。
4. 注意事项(1)观测时要保证测量仪器的准确性和稳定性。
(2)应根据实际情况合理选择观测距离和观测角度。
(3)观测过程中应注意避免大幅度的振动和干扰。
(4)数据处理时要注意计算的准确性和精度控制。
三、应用案例某城市地铁二号线的测绘工作采用了无定向导线计算方法。
测量团队在地铁线路上选择了多个控制点,并通过观测和计算得出了各个目标点的坐标。
无定向导线的平差计算及精度分析_secret

无定向导线的计算及精度分析[摘要]:本文结合公式推导介绍了无定向导线的计算方法、平差原理及精度分析,并且通过与单一附合导线进行精度分析比较后提出无定向导线在实际应用中应注意的问题。
[关键词]:无定向导线;计算;精度;应用0 引言在测量工作中,由于光电测距技术的发展,导线测量已成为布设平面控制测量的主要方法。
但是有时由于条件的限制,在起始于两个高级点的附合导线端点上无法观测方位连接角,即没有起始方位角,我们称之为无定向导线。
利用这种导线解决低等平面控制测量的困难较为方便。
以下结合公式推导来介绍无定向导线的计算及其应用。
1 计算方法及平差原理1.1计算方法如图一,设M(1)、N(n+1)为两个已知坐标点,2、3、…、n为无定向导线的待求点,观测了s1、s2、…、s n共n条边和β2、β3、…、βn 共(n-1)个方向角。
M(1)图一当导线用于测图控制时,一般采用近似平差,仿照线形锁的计算法,先假设起始边方位角为α1,以M点为起算坐标点,按支导线法推算出终点N 的假坐标,利用M 点和N 点的真假坐标按坐标反算计算出MN 的真方位和假方位并求出真假方位角的差值,再计算真方位角,最后计算各待求点的真坐标,这是常用的方法。
另外,还可以按照坐标换算公式来计算,如图二,可以看出:⎭⎬⎫++++=++++=n n M N n n M N s s s Y Y s s s X X ααααααsin sin sin cos cos cos 22112211 (1)αi =α1+180⨯(n-1)+∑=ni 2βi (2)式中X M 、 Y M ;X N 、Y N 为起终点坐标,αi 为各条导线边的方位角。
将(2)代入(1)整理后得:⎭⎬⎫⨯-⨯=-=∆⨯-⨯=-=∆1111sin cos sin cos ααααB A Y Y Y B A X X X M N MN M N MN (3)结合图二可以看出:⎭⎬⎫+++=+++=n n b b b B a a a A 2121 (4)其中:a 1=s 1,b 1=0; a 2=-s 2×cos β2, b 2=-s 2×sin β2; a 3=s 3×cos(β2+β3), b 3=s 3×sin(β2+β3);…a n = s n ×cos(β2+β3+…+βn ),b n =s n ×sin(β2+β3+…+βn )。
无定向导线的平差计算

无定向导线的平差计算工程测量中,导线测量是最基本的测量方法之一,无论是在土木工程、建筑工程、矿山工程等领域都有广泛应用。
而在导线测量中,平差计算是必不可少的一环。
本文主要讲述无定向导线的平差计算方法。
二、无定向导线的概念无定向导线是指在测量过程中,没有规定导线的起点和终点,只是通过测量每个点之间的距离和方位角度来确定各个点之间的位置关系。
这种测量方法常用于野外控制测量,比如在矿山、森林等环境中,由于地形复杂、交通不便,无法使用传统的定向测量方法,只能采用无定向导线测量。
三、无定向导线的计算方法1. 距离测量在无定向导线测量中,距离测量是最基本的测量方法。
距离测量有多种方法,比如直接测量、间接测量等。
直接测量是指使用测距仪等工具直接测量两个点之间的距离;间接测量是指通过测量一些参数,如角度、高差等计算出两个点之间的距离。
无论哪种方法,都需要在测量的过程中保证测量的准确性和精度。
2. 方位角测量方位角是指一个点相对于另一个点的方向角度。
在无定向导线测量中,方位角测量是非常重要的一个环节。
方位角测量有多种方法,比如直接测量、间接测量等。
直接测量是指使用方位角仪等工具直接测量两个点之间的方位角;间接测量是指通过测量一些参数,如角度、高差等计算出两个点之间的方位角。
无论哪种方法,都需要在测量的过程中保证测量的准确性和精度。
3. 角度平差在无定向导线测量中,由于不存在起点和终点,导致测量误差会随着测量点的增加而累积。
因此需要进行角度平差,以减小误差。
角度平差的方法有多种,比如最小二乘法、最大似然法等。
其中最小二乘法是最常用的一种方法。
最小二乘法是指通过最小化误差平方和来确定各个角度的权重系数,从而得到最终的角度值。
4. 距离平差在无定向导线测量中,由于不存在起点和终点,导致测量误差会随着测量点的增加而累积。
因此需要进行距离平差,以减小误差。
距离平差的方法有多种,比如最小二乘法、最大似然法等。
其中最小二乘法是最常用的一种方法。
导线的基本计算
计算检核: 水平角改正数之和应与角度闭合差大小相等符 号相反,即
v
f
在本例中:
f 50 10 v 5 n
计算检核:
*
v 10 10 10 10 10
50 f
*
角改正数,即
(4)计算改正后的水平角 改正后的水平角 改等于所测水平角加上水平 i
(1)计算坐标增量
根据已推算出的导线各边的坐标方位角和相应边的边 长,计算各边的坐标增量。
在本例中,导线边1-2的坐标增量为: x12 D12 cos 12 201.60 m cos 3352400 183.30 m * y12 D12 sin12
201.60 m sin 3352400 83.92 m *
x A 435.56 m,y A 658.82 m 试计算终点B的坐标。
解
xB x A DAB cos AB
435.56 m 135.62 m cos 803654
457.68 m yB y A DAB sin AB
658.82 m 135.62 m sin 803654
以 2为例: 2 v 1082718 ( 10) 1082708 * 2
i i v
计算检核:
改正后的闭合导线内角之和应为( n 2) 180
本例为540˚。
*
3.推算各边的坐标方位角
根据起始边的已知坐标方位角及改正后的水平 角,推算其它各导线边的坐标方位角。 3352400 180 1082708 23 12 180 2 62351 03 360 26351 08 *
1 x 500.00m 1
【精】无定向符合导线平差原理(学习资料)
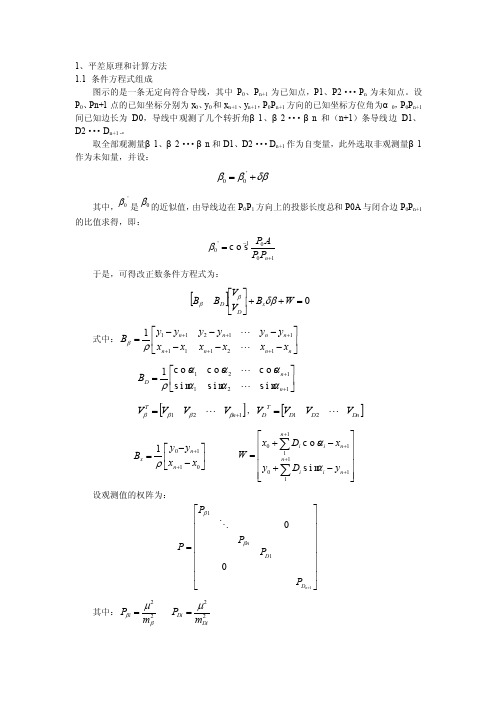
1、平差原理和计算方法1.1 条件方程式组成图示的是一条无定向符合导线,其中P 0、P n+1为已知点,P1、P2···P n 为未知点。
设P 0、Pn+1点的已知坐标分别为x 0、y 0和x n+1、y n+1,P 0P n+1方向的已知坐标方位角为α0,P 0P n+1间已知边长为D0,导线中观测了几个转折角β1、β2···βn 和(n+1)条导线边D1、D2···D n+1·。
取全部观测量β1、β2···βn 和D1、D2···D n+1作为自变量,此外选取非观测量β1作为未知量,并设:δβββ+='00其中,'0β是0β的近似值,由导线边在P 0P 1方向上的投影长度总和P0A 与闭合边P 0P n+1的比值求得,即:1001'0c o s +-=n P P AP β 于是,可得改正数条件方程式为: []0=++⎥⎦⎤⎢⎣⎡W B V V B B x D D δβββ式中:⎥⎦⎤⎢⎣⎡------=++++++n n n n n n n n x x x x x x y y y y y y B 12111112111 ρβ⎥⎦⎤⎢⎣⎡=++121121s i n s i n s i nc o s c o s c o s 1n n D B ααααααρ []121+=n TV V V V ββββ ,[]D n D D T D V V V V 21=⎥⎦⎤⎢⎣⎡--=++01101x x y y B n n x ρ ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+-+=∑∑++++11101110s i n c o s n n i in n i iy D y x D x W αα 设观测值的权阵为:⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡=+11100n D D nP P P P P ββ 其中:22ββμm P i =22DiDi mP μ=取βμm =,则:1=i P β,22DnDi m m P β=1.2法方程式组成及改正数计算根据改正数条件方程式和观测值的权阵可组成具有参数的条件平差的法方程式00=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡W K Nx δβ式中:⎥⎦⎤⎢⎣⎡=21K K K ⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---⎪⎪⎭⎫ ⎝⎛+-⎪⎪⎭⎫⎝⎛+---⎪⎪⎭⎫ ⎝⎛+--⎪⎪⎭⎫ ⎝⎛+-=++++++++++++++∑∑∑∑∑∑∑∑0)(1)(1)(1sin )(1cos sin ))((1)(1cos sin ))((1cos )(10110011112212111112101111121112212x x y y x x P x x P y y x x y y P y y x x P y y Nx n n n n n Di i i n n n Di i i n i i n n nn Di i i n i i n nn Di i i n ρρραρααρρααραρ解算法方程可得:W N B M T x 11---=δβ)(1W B N K x +-=-δβ式中:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--⎥⎦⎤⎢⎣⎡--=++-++ρρρρ)()()()(0!1010!10x x y y N x x y y M n n n n ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+-⎪⎪⎭⎫ ⎝⎛+--⎪⎪⎭⎫ ⎝⎛+--⎪⎪⎭⎫⎝⎛+-=∑∑∑∑∑∑∑∑++++++++++n n Di i i n n n Di i i n i i n nn Di i i n i i n n n Di i i n P x x P y y x x P y y x x P y y N 11122121111121111121112212sin )(1cos sin ))((1cos sin ))((1cos )(1αρααρααραρ然后求得闭合边第一条导线边P0P1的夹角β0值。