Harmonic Drive
HarmonicDrive伺服电机谐波减速器
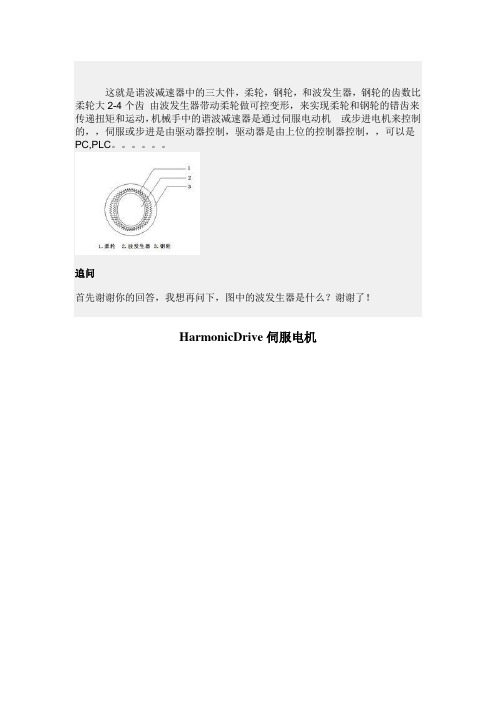
这就是谐波减速器中的三大件,柔轮,钢轮,和波发生器,钢轮的齿数比柔轮大2-4个齿由波发生器带动柔轮做可控变形,来实现柔轮和钢轮的错齿来传递扭矩和运动,机械手中的谐波减速器是通过伺服电动机或步进电机来控制的,,伺服或步进是由驱动器控制,驱动器是由上位的控制器控制,,可以是PC,PLC。
追问首先谢谢你的回答,我想再问下,图中的波发生器是什么?谢谢了!HarmonicDrive伺服电机产品型号:产品描述:HarmonicDrive将电机和减速机集成为一体式,加装编码器,体积更小,重量更轻。
减速比大,同事啮合的齿数多,承载能力强,运动平稳,无背隙无回差,传动效率高。
|产品特点|型号|额定表|产品图纸|采用扁平形状、中空孔构造,FHA-C实现了机械、装置小型化、构造简单化。
●薄型、小巧●中空结构●高转矩、高刚性、高精度●内置刚性性能优异的支撑装置●具有多种控制功能的控制单元也已系列化[用途]●机床: 转塔刀分度、分度盘、装载机●机器人: 旋转、关节驱动部●半导体制造设备: 搬运机器人、检查平台●液晶制造设备: 搬运机器人、检查平台、感光剂涂抹辊驱动●印刷机: 感光剂涂抹辊驱动机型: FHA-C系列型号: 17版本符号: C表示最新版本谐波驱动减速比: 50、100、160编码器种类和分辨率• E250 : 相对位置编码器2500p/r• S248 : 绝对位置编码器2048p/r选购配件符号(详细情况,请咨询我公司营业所)特殊规格(标准品不标SP)HA-655-2-200或HA-675-2-200组合驱动器-(HA-655-2A-200或HA-675-2A-200)。
铁道车辆专业英语
铁道车辆专业英语 Final approval draft on November 22, 2020Chapter1IntroductiontoRailwayLocomotive机车freightwagon货车passengercoach客车multipleunits动车组metrocar地铁车辆lightrail轻轨railwayservicecars铁路服务车Rail铁轨standardgauge标准轨距narrowgauge,broadgauge窄轨,宽轨Trackbed道床Sleeper,枕木Crosstie枕木Ballast,subballast,道砟,底部道砟fastener紧固件Turnout道岔Derail(derailment)脱轨Crossing平交道口colliery:煤矿quarry:采石场flangedsteelwheels:有凸缘钢轮copperore:铜矿speakof:谈到,提及backbone:骨干bulkfreight:散装货物masscommutationtraffic:大规模通勤运输shorthaul:短途运输Merchandisetraffic:货物运输Depreciation:(反-appreciation),减值,折旧,贬值Settling:沉降,沉积bulkfreight:散装货物Subgrade:地基,路基Soilstratum:地层Embankment:堤坝Trimoff:修剪Organictopsoil:有机表层土Civilengineering:土木工程Earthwork:土方,土方工程Gravitywall:重力墙Drainage:排水系统,排水装置Realestate:房地产,不动产Crane:起重机Tamper:捣固机Trolley:台车,手推车,电车Headway:进展,向目标前进Chapter2TheTrainCoach,carriage,客车Monorail单轨Refrigeratorwagon冷藏车High-speedrailways高速铁路Maglev磁悬浮Open-toppedwagon敞顶车Cograilway嵌齿铁路Rubber-tiredunderground橡胶轮地铁Siding旁轨,支线Freighttrain货运列车Passengertrain旅客列车Heavyfreight重载货运Sleepingcar卧铺车Diningcar餐车Run-aroundtrack调车线Inter-citytrain城际列车Localtrain管内列车,慢车Elctrictraction电力牵引Stopper慢车Double-deckedpassengertrain双层旅客列车Motorcar(trailercar)动力车(拖车)Container集装箱车Tanker罐车Drivingcab司机室TOFC平板拖车Boxwagon棚车Coupler车钩Maintenanceofway道路维护Long-distancetrain长途列车ChannelTunnel海峡隧道parcel:package包裹Travellingpostoffices:移动邮局Centrifugalforce:离心力pram:婴儿车Wheelchair:轮椅Conurbation:有卫星城市的大都市elevatedstructure:高架结构Accelerate(decelerate):加速(减速)Tram,trolley,streetcar:有轨电车Flexibility:机动,灵活Lowloder:低架拖车Sneakinto:偷偷地摸进Stowaway:偷乘,搭白车Fatality:disasterKit:工具包,装备earnone‘skeep:值得雇用,挣饭吃Showup:揭露,露出Deadendterminal:闭塞终端Bufferstop:止冲器Crossover:转辙轨Locomotiveescape:机车折返Phaseout:逐步淘汰,逐步停止Intensiveservice:auxiliaryequipment:辅助设备,备用设备,附属设备Heavymaintenance:大修Whilst:时时,同时,whilePush-pull:推挽Intervalservice:Keepatforefrontof:保持在……最前沿trainloading:列车运载量Traincapacity:列车运载能力Densityofpassengers:乘客密度Loadfactor:上座率Patronage:保护,光顾,赞助Highdegreeofstandardisation:高度标准化Headstock,endsill,pilot:endbeamBellmouth:钟形口,喇叭口Lineup:整队,排列Semipermanentcoupler:半永久车钩Beboltedtogether:螺栓连接Cushioning:减震,缓冲Uncoupling:解钩,拆开(反,coupling)Buckeye,KnuckleandJanneycoupler:詹式车钩Couplerknuckle(jaw):钩舌Couplerhead:钩头Hingepin:折页销Fullyautomaticcoupler:全自动车钩Disengage:脱离pneumatical:风力的,空气的Keepingoodworkingorder:保持正常运转状态Drawgear:牵引装置Bolt:螺栓Pedal:踏板Funicular:索道Coupleralignmentbar:车钩调直杆Pushbutton:按钮Shockabsorber:减震器Multicorecable:多芯电缆Chapter7RailwayCars(1)Baggage行列车Coach客车Combine合造车Dome圆顶车Lounge游乐车Dinner餐车Observation了望车Sleeper,sleepingcar,Pullman卧铺车RPO铁路邮政车Housingcar封闭车Autorack,autocarrier汽车运输车Boxcar,orvan棚车Refrigeratorcar,reefer冷藏车Stockcar牲畜车Opentopcar敞车Gondola敞车Hopper漏斗车Ballastcar砟车Flatcar平车Depressed-centerflatcar凹底平车Piggybackcar背负式车Schnabelcar钳夹车Tankcar罐车Caboose守车Snowplow除雪犁Dynamometercar动力检测(试验)车Encompasss:包围,环绕,构成,包括Listedinalphabeticorder:按字母顺序排列lining:衬里,衬套,内层,linedwithContamination:污染,玷污Corrosiveaction:腐蚀作用Stainlesssteel:不锈钢Glassenamel:玻璃釉彩,搪瓷Pocketforstake:柱插口Tie-downpoint:栓柱Manualbrakeequipment:手制动Airbrakeequipment:空气制动primaryunderframe:主车架,主底架Cumbersome:笨重的Intermodalshipping:联合运输Tonnage:吨位log:木材,原木Lumber:木材Slopedown:向下斜Scrapmetal:金属屑,废金属Aggregate:粒料,总计,聚集Woodchip:木屑,木片Dropend:落端门Shovel:铲Perishablefreight:易腐货物spoiling:变坏,损毁Insulation:绝缘层,保温层Keepout:Coolingsystem:冷却系统Coldbrine:冷盐水Waterproof:防水的Airtight:密封的,气密的Warehouse:仓库,库房Breakage:破坏,破损Barrel:桶Drum:鼓型圆桶safetyvalve:安全阀Chapter8RailwayCars(2)FormoreinformationseeTiltingtrain摆式列车Head-endequipment车端设备Branchline支线Air-conditionedhardseatcar空调硬座车seatingcapacity定员Lengthbetweentruckpivotcenters车辆定距tareweight空重Clearance间隙Wheelbase轴距Gauge轨距Constructionalspeed构造速度Wheeldiameter车轮直径Stanhope:轻便马车enroute:在途中Streamlined:流线型的Ornate:装饰的,华丽的,(文体)绚丽的todate:到此为止Aluminumsteel:铝钢,含铝钢evolveinto:发展[进化]成Fluted:有凹槽的Conveyance:运输Rowuponrow:一排排,一行行carry-on:手提行李,手提的Aisle:走廊Partitionedinto:分割,分隔开efficiencyapartment:有小厨房和卫生设备的小套公寓房间,公寓小套间Interior:内部Galley:厨房Recede:后退,倒退,变得模糊Felloutofuse:开始不用,渐废Vantage:优势,有利情况Roofline:屋顶轮廓线Dumbwaiter:楼上楼下送饭菜的小升降机,可移动的上菜架或上菜桌Aluminumofhighstrengthalloy:高强度铝合金pane:长方块,尤指窗格,窗格玻璃,边,面,方框Vestibule:门廊,前厅Chapter9BogieRidecomfort乘坐舒适性Irregularity轨道不平顺Wheeltread车轮踏面Suspension悬挂系统Treadgradient踏面锥度Flange轮缘Runningperformance运行品质Articulatedbogies铰接式转向架Lowercenterofgravity低重心Swinghanger摇枕吊Bolsterbogie摇枕转向架Bolsterlessbogie无摇枕转向架Wheelsethunting轮对蛇行Anti-yawdamper抗蛇行减震器Suspensiongear悬挂装置JR日本铁路Bogieframe构架Lateraldamper横向减震器Tractiontransferdevice牵引装置Brakeequipment制动装置Axlebearingandaxlebox轴箱轴承及轴箱Axlespring轴箱弹簧Brakedisk制动盘Tractionmotor牵引电机Gearbox齿轮箱,减速箱Wheelset轮对Tractionforce牵引力Airspring,airbag空气弹簧Sidebeam侧梁Coilspring圆弹簧Crossbeam横梁Presswelding压力焊Bearing轴承Supportrigidity支撑刚度Pedestalswingspringtype导框式定位Play,游间,游隙,摆动量Leafspring板弹簧 IStypeIS拉板式定位Bendingstrength弯曲强度Unsprungmass(weight)Non-sprungmass簧下质量Axlebeamtype转臂式定位Cylindricalrollerbearing圆柱滚子轴承Ballbearing球轴承Overhaul大修Nosesuspensiondevice轴悬,臂式悬挂装置Cardandrivingdevice万向轴驱动Torqueconverter变扭器Wheeltreadbrake踏面制动Discbrake盘型制动Brakeshoe闸瓦Frictionalheat摩擦热Brakepad制动闸片Motorbraking动力制动Quilldrive空心轴驱动Hollowshaft空心轴Gearwheel,drivengear从动齿轮Pinion,drivinggear主动齿轮Electriclocomotive电力机车Railhead轨头Reprofile镟修Wheel/railinterface轮轨关系Lubricant润滑物Flattedwheel车轮擦伤Bogietransom转向架横梁Brakecylinder制动缸Parkingbrake停车制动Heavydutybrake重载制动Framemountedmotor架悬式电机Liftinglug吊耳Gearbox齿轮箱Compressedair压缩空气WSP(wheelslideprotection)车轮防滑装置Speedsensor速度传感器Pendulum(titling)bogie摆式转向架Servicelife使用寿命Designconcept设计理念Runningspeed运行速度Maximumspeed最大速度Lateralforce横向力Transitioncurve过渡曲线Circularcurve圆曲线Self-steeringbogie自导向转向架Runningstability运行平稳性Forcedsteeringbogie迫导向转向架Obscurity:隐蔽,偏僻,含糊Abrasion:磨耗Intermsof:accordingtoIncomparisonto:对比Besensitiveto:对……敏感Rotationalresistance:回转阻尼Harmonic:谐波,和声,谐函数Isolate…from…:隔离Becommercializedfor:商业化,商品化Weldingtechnology:焊接技术Generalstructure:一般结构Rolledsteel:钢材,轧制钢Seamlesssteelpipe:无缝钢管Criticalcomponent:关键部件Corrugatedwheel:波形辐板车轮Susceptibleto:易受影响的Massimbalance:动量不平衡Resonance:共振Putintoservice:投入运营,交付使用Rightanglecardandrivingdevice:直角万向轴驱动装置Impede:stopForgedsteel:锻钢Porcupine:豪猪Rubberbushedlinks:用橡胶衬里的连杆Gearwheel:大齿轮Inrelationto:withregardto,关于,涉及,与……比较Degreeofconing:锥度Squealingnoise:尖啸Flangeorrailgreasing:轮缘或轨道油脂Slippage:滑动Weledsteelboxformat:焊接箱型结构Pressagainst:压向Neutralsection:分相区Leadingbogie:导向架Chapter10VehicleSuspensionVehiclesuspension车辆悬挂系统Cushionsystem缓冲系统Laminatedsteelspring板弹簧Axleload轴重Carryingload载重Springhanger弹簧吊Springlank弹簧托板Swinglink吊杆Sideframe侧架,侧梁Sidebearer(bearing)旁承 Centerbearing下心盘Equalizerbarsuspension均衡梁式悬挂系统Commonwealthbogie均衡梁式转向架Levellingvalve高度调节阀Solidrubbersuspensionpack橡胶堆悬挂系统Parlance:idiom,谈话,说法,用法Taketheformofleafsteelspring:采用板弹簧型式Securingstrap:保护带,安全带Beleftoutforsimplicity:为简便起见,不显示(去掉)……Endon:从一端看,从端面看,一端向前地Rivete:铆钉,固定Sideview:侧视图Simplifieddiagram:简图Sidewaysmovement:侧面运动Reversal:逆转Durability:耐久性,耐用性;坚固Axleboxyoke:轴箱轭RubberChevron:V型橡胶Boardingandalighting:上车,落下Intermittentgentlehissing:断断续续的轻微的咝咝声Alightfrom:走下来,下车Chapter11BrakingKineticenergy动能Airbrakesorpneumaticbrakes空气制动Brakepipe列车管,制动管Compressor空气压缩机Mainreservoir主风缸Driver’sbrakevalve司机阀Equalisingreservoir均衡风缸Feedvalve给气阀;进给阀Anglecock截断塞门,折角塞门Hose橡胶软管(制动软管)Auxiliaryreservoir辅助风缸Triplevalve三通阀Brakecylinder制动缸Brakeblock闸瓦Relayvalve延迟阀Failsafe失效安全Frictionmaterial摩擦材料Compositionmaterial复合材料Brakerigging制动装置Rateofapplication制动倍率Slidevalve滑阀Graduatingvalve递动阀,节制阀Regulatingvalve调整阀,调节阀Propagationrate制动波速Distributor分配阀Diaphragm,膜片Throttle节流阀slackaction列车冲动E-Pbrake电空制动Dynamicbraking动力制动Rheostaticbraking电阻制动Regenerativebraking再生制动Psi:Poundspersquareinch磅/平方英尺Replenished:补充Trigger:打开,激发,引起Distributor:分配阀Sophisticated:复杂的Choke:阻气门Inshot:跃升装置;跃升timelapse:时滞,时延Elusive:令人困惑的;油滑的;难记忆的Spur:踢马剌,剌激物,刺激Essentialingredient:关键因素Thyristor:闸流晶体管;半导体开关元件;可控硅;硅可控整流器Circuitry:电路,线路Resistor:电阻器Powerelectronic:电力电子Chapter12DepotsandWorkshopsSlidingdoor滑动门,塞拉门Routineexamination常规检查Consumable易损易耗件Maintenanceregime维修体制Existingrailway既有铁路Maintenancemanagement维修管理Interchangeability互换性Operatingpattern运行模式Converging聚集,会合Marshalling编组Electrifiedrailway电气化铁路currentcollectionequipment吸流装置Audit审计Performanceindicator绩效指标maintenancestandard维修标准Commonsense:常识Revisit:再访,重游,重临Drawon:戴上,吸收,利用,引诱,向...提取,招来,临近Rectify:矫正,调整Progressivelyadverseeffecton:日益增加的反作用Morale:士气,民心Upholstery:室内装潢Clomaticcondition:天气条件OfequalimportanceChore:家务杂事Contractual:契约的Goodaccesstocomponents:零部件的易接近性Superfluous:多余的,过剩的,过量的Watertight:不漏水的,水密的Thwarted:反对;阻挠,挫败,妨碍Overlook:俯瞰,耸出,远眺,没注意到Refitting:整修,改装premise:房产;房屋Planningstage:计划阶段Termini:目的地,界标,terminus的复数Converging:集中,收敛,会聚Proximity:接近,亲近Jack:插孔,插座,起重器,千斤顶,男人Inspectionpit:检查坑Walkway:走道,人行道Wheelturningfacility:车轮加工设备ConstructedwashroadDe-icingarrangement:防止结冰,装以除冰装置,除冰Firealarm:火灾报警Chapter13DevelopingMaglevTrainsMagneticfield磁场Maglev磁悬浮Propulsion推进Levitation悬浮Guidance导向Attractiveforce吸引力Ferromagnetic电磁铁的Magneticrepulsion磁力推进Superconductingmagnet超导磁体Linearmotor线性电机Magnetizingrail磁化轨道Payloadweight负载Dynamicload动载荷Electrodynamicsuspension,EDS电力悬浮Electromagneticsuspension,EMS电磁悬浮Noconsensusexistson:Levitate:(使)轻轻浮起,(使)飘浮空中Cryogenics:低温学Linearsynchronousmotor:LSM同步直线电机Linearinductionmotor:LIM直线感应电机Gasturbine:燃气涡轮Turboprop:涡轮螺旋桨发动机Concurrently:同时发生的事件,并发的,协作的,一致的Availabilitycrisis:Metropolitan:大城市Turbulence:骚乱,动荡,(液体或气体的)紊乱HSGT,high-speedGroundTransportationACT:FRA:FederalRailroadAdministration联邦铁路管理局[美]Chapter14PowerSupplyofElectricTractionPowersupply供电Electrictractionsystem电力牵引系统Overheadwire接触网Powertransmission电力传输Thirdrail第三轨Collector受流器Pantograph受电弓Returncircuit回路Substation配电站Earthingprotection接地保护Signallingcircuit信号电路Catenary接触网Dropper吊线Electricarc电弧Mast柱子Boostertransformer,BT吸流变流器Returnwire回流线Trackmagnet轨道磁铁Neutralsection分相区Communicationcable通信线缆Pigtail引线Diaper:尿布Inparallelwith:与...平行,与...同时,与...并联Microprocessor:微处理器Gripwith:掌握,理解Electrolysis:电解Insulated:绝缘的,insulation,insulatorManhole:(锅炉,下水道供人出入检修用的)人孔,检修孔Atone’speril:由某人自担风险Takeprecautionstodo:采取防范措施Aggravate:使恶化,加重Stitching:用U字钉钉箱,缝纫Sag:松弛,下陷,下垂,(物价)下跌,漂流Evacuate:疏散,撤出,排泄Visualintrusion:视觉障碍,妨碍Chapter15TheLightRailTransitionCBI英国工业联合会Urbantransportpolicy城市交通政策Urbansprawl城市扩张Lightrail轻轨Roadtransport路面交通Steepgradient大坡道sharpcurve小半径曲线Criteria标准Congestedurbanarea:拥挤的城市区域HouseofCommonsTransportCommittee:上议院交通委员会Congested:拥挤的Pedestrians:步行者Cyclists:骑脚踏车的人Publictransportuser;公共交通使用者Motorists:乘汽车者AMA:AssociationofMetropolitanAuthorities Intractable:难处理的Down-marketed:价廉质次的,低档市场的Parkandride:停车换乘Pollutant:污染物质Resurgence:复苏Overambitious:野心太大的Tyne:泰恩河Underutilized:为充分利用的Newcastle:纽卡斯尔。
谐波减速器柔轮与柔性轴承断裂失效分析

2023年第47卷第3期Journal of Mechanical Transmission谐波减速器柔轮与柔性轴承断裂失效分析穆晓彪1邵洙浩2郝春辉1高明艳1张朝磊2(1 北京中技克美谐波传动股份有限公司,北京101300)(2 北京科技大学材料科学与工程学院,北京100083)摘要通过观察显微组织、测定力学性能以及观察断口形貌,对比分析国产失效谐波减速器和日本谐波减速器关重件柔轮和柔性轴承的显微组织和力学性能,并分析了国产谐波减速器过早失效的原因。
结果表明,失效谐波减速器柔轮显微组织与日本相同,均为回火屈氏体,失效柔轮平均晶粒尺寸为8.2 μm,比日本柔轮平均晶粒尺寸高了1.5 μm;失效柔性轴承和日本柔性轴承显微组织均为回火马氏体,失效柔性轴承平均晶粒尺寸为13.1 μm,比日本柔性轴承平均晶粒尺寸高出6.9 μm。
失效谐波减速器柔轮断口呈脆性断裂,无明显裂纹源,但失效的柔性轴承断口存在明显断裂走向,在裂纹源中有大尺寸、聚集性分布的夹杂物。
失效轴承钢质洁净度差,存在大尺寸夹杂物,且显微组织晶粒粗大,阻碍裂纹扩展的能力差,导致国产谐波减速器过早失效。
关键词柔轮柔性轴承晶粒尺寸夹杂物Fracture Analysis on Flexspline and Flexible Bearing of the Harmonic Reducer Mu Xiaobiao1Shao Zhuhao2Hao Chunhui1Gao Mingyan1Zhang Chaolei2(1 Beijing CTKM Harmonic Drive Co., Ltd., Beijing 101300, China)(2 School of Materials Science and Engineering, University of Science and Technology Beijing, Beijing 100083, China)Abstract Microstructure and mechanical properties of the failure flexspline and the Japanese flexspline for harmonic reducers and fracture reason are analyzed by quantitative of microstructure, determination of me⁃chanical properties and fracture analysis. The result shows that the microstructure of the flexspline of the failed harmonic reducer is the same as that of Japan, both of which are tempered troostite. The average grain size of the failure flexspline is 8.2 μm, which is 1.5 μm higher than that of the Japanese flexspline. The microstructure of the failure and Japanese flexible bearings is tempered martensite. The average grain size of failure flexible bearings is 13.1 μm, which is 6.9 μm higher than that of the Japanese flexible bearings. The fracture morpholo⁃gy of the flexspline presents brittle fracture characteristics without obvious crack source. The fracture of flexible bearings shows obvious fracture trend. There are obvious crack trends in the fracture of flexible bearing. The crack source is pinpointed at the region where large agglomerative inclusions are observed. The poor purity of flexible bearing and the coarse microstructure with poor ability to hinder crack propagation are the main causes of premature failures of domestic harmonic reducers.Key words Flexspline Flexible bearing Grain size Inclusion0 引言谐波减速器由柔轮、刚轮、柔性轴承和凸轮轴组成,是基于弹性薄壳弹性变形理论、应用金属挠性和弹性力学原理发展起来的一种减速器。
超特克(Supertex)MD1812和MD1813芯片应用说明书
Supertex inc.AN-H56Application NoteIntroductionThe MD1812 and the MD1813 are two unique composite return-to-zero (RTZ) pulser drivers for ultrasound applications. The ICs have built-in level shifters that provide negative P-MOS gate DC bias and fast AC coupled gate drivesignals. They enable the fast damping functions necessary to generate return-to-zero bipolar pulses, and are also able to keep the zero-state to as long as needed, even to infinity. These kinds of fast return-to zero and DC coupled features are very useful for medical ultrasound imaging equipment, piezoelectric transducer drivers, material flaw detection, ultrasonic NDT detection, and sonar ranger applications, especially for those that need to launch ultrasound in pseudo-random codes. Designing a Pulser with the MD1812/13This a pplication n ote d escribes h ow t o u se M D1812 o r M D1813 to design the basic channel of an ultrasound transmitter with the RTZ feature. The circuit is a single channel ultrasound transmitter using the MD1812 or MD1813 to drive TC6320 & TC2320 MOSFETs. It can generate fast return to zero waveforms. The output of high voltage to transducer has ±2A source and sink current capability. A CPLD programmable logic circuit and on-board 40MHz crystal oscillator generate a fast logic signal to control the pulse circuit. The CPLD hasa six-pin JTAG connection for Xilinx’s USB or a convenient parallel-port programming link cable. The circuit consists of one MD1812K6 or MD1813K6 in a 16-lead 4x4x0.9mm QFN package, driving TC6320FGs and TC2320FGs, two complementary high-voltage P and N- channel MOSFETs in one single SO-8 package. The input stage of the MD1812/13 is a high-speed level translator that is able to operate with logic input signals of 1.2V to 5.0V amplitude. In this circuit, the CPLD output logic is typically 3.3V. An adaptive threshold circuit is used with the OE pininside of the MD1812 to set the level translator threshold to the middle of the input logic 0 and logic 1 levels. The OE pin serves a dual purpose. First, its logic 1 level is used to compute the threshold voltage level for the channel input level translators. Second, when OE is low, the outputs are disabled, with the A and C outputs high and the B and Doutputs low (for MD1812 only). This assists in properly pre-charging the coupling capacitors that may be used in series in the gate drive circuit of external PMOS and NMOS FETs. The MD1812/13 level translator uses a proprietary composite drive circuit, which provides DC coupling, together with high-speed operation. The output pin, OUT C , is designed to drive the return-to-zero PMOS FET through a capacitor as fast as an AC coupling gate driver, and OUT G provides delayed DC coupling negative biased gate control to the same PMOS FET. The OUT C swings between V H and V L voltages, while OUT G is within V SS or V NEG levels. Note that the OUT C and OUT G pins of one chip are designed to drive together forone PMOS FET, and that the PMOS FET source is typicallyconnected to the same potential of the MD1812/13 V SS voltage. Each of the output stages of OUT A , OUT B , OUT C & OUT D of MD1812/13 are capable of peak currents of up to ±2.0A, depending on the supply voltages used and load capacitance. But a 2kΩ resistor, R36, must be between OUT G and the gate of the PMOS FET, which is driven by the OUT C through a capacitor. This configuration provides the optimal series resistance value of the gate DC bias driver circuit.The output stage of the MD1812/13 has separate power connections enabling the output signal high and low levels to be chosen independently from the driver supply voltages. As an example, the input logic levels may be 0V and 1.8V, the control logic may be powered by +5V and –5V, and the output high and low levels may be varied anywhere over the range of +5V to -5V. In this design example, MD1812/13’s V DD and V H are both powered by +10V, V SS and V L are grounded, and V NEG is –10V. The source pin of the RTZ PMOS FET driven by the OUT C and OUT G pins is connected to ground.PCB Layout TechniquesIt is very important that the slab at the bottom of the IC package, which is the IC substrate “pin”, be externally connected to the V NEG pin to make sure it always has the lowest potential in any condition.Designing An Ultrasound Pulser with MD1812/MD1813 Composite DriversBy Ching Chu, Sr. Application EngineerUse high-speed PCB trace design practices that are compatible with the circuit’s operating speed. The internal circuitry of the MD1812/13 can operate at up to 100MHz, with the primary speed limitation being due to load capacitance. Because of this high speed and the high transient currents that result when driving capacitive loads, the supply voltage bypass capacitors should be as close to the supply pins as possible. The V SS and V L pins should have low inductance feed-through connections that are connected directly to a solid ground plane. If these voltages are not zero, they will require bypass capacitors similar to the positive power supplies. The V DD and V H supplies determine the output logic levels. These two pins can draw fast transient currents of up to 2.0A, so they should be provided with a low-impedance bypass capacitor at the chip’s pins. A ceramic capacitor of up to 1.0µF may be appropriate. Minimize the trace length to the ground plane, and insert a ferrite bead in the power supply lead to the capacitor to prevent resonance in the power supply lines. A common voltage source and local decoupling capacitor may be used for the V DD and V H pins, which should always have the same DC level applied to them. For applications that are sensitive to jitter and noise, insert another ferrite bead between V DD and V H and decouple each pin separately.Pay particular attention to minimizing trace lengths and using sufficient trace width to reduce inductance. Surfacemount components are highly recommended. Since the output impedance of this driver is very low, in some cases it may be desirable to add a small value resistor in series with the output to obtain better waveform integrity at the load terminals. This will, of course, reduce the output voltage slew rate at the terminals of a capacitive load. Pay particular attention to the parasitic coupling from the driver’s output to the input signal terminals. This feedback may causeoscillations or spurious waveform shapes on the edges of signal transitions. Since the input operates with signals down to 1.2V, even small coupling voltages may cause problems. Use of a solid ground plane and good power and signal layout practices will prevent this problem. Also ensure that the circulating ground return current from a capacitive load cannot react with common inductance to create noise voltages in the input logic circuitry.Testing the Ultrasound Pulser The MD1812 RTZ pulser design example is tested with the following power supply voltage and current limiting: V PP 0 to +100V 5mA, V NN 0 to -100V 5mA, V DD = +10V 50mA, V NEG -10V 5mA, V CC +3.3V, 90mA.The HV OUT signal appears at the SMA connector J6. There is a 5:1 attenuation of the signal, due to the value of resistor R11. When driving a real transducer load, the value of this resistor should be reduced in value to match the load impedance.The HV OUT signal passes through jumper J5, which can be used to terminate the HV OUT signal in a dummy load, comprising a 220pF capacitor in parallel with a 1kΩ resistor. When an external load is connected, the dummy load is not required, and J5 can be configured to pass the signals straight through to the output connector J6.All the on-board test points are designed to work with an active oscilloscope probe, such as the Tektronix P6243 1MΩ active probe. Because TP7 is connected to the HV OUT , where potentially damaging voltages could be present, make sure that V PP /V NN does not exceed the probe limit. If using another type of high impedance oscilloscope probe for the test points, ensure that the ground lead connections to the circuit board ground plane are as short as possible.There are multiple frequency and waveform combinations that can be selected as bipolar pulses, PW or CW waveforms. An external clock input can be used if the on-board 40MHz-oscillator is disabled. The external trigger input can be used to synchronize the output waveforms. There are five push buttons for selecting demo waveform, frequency, phase, and MD1812 chip enable functions. Color LEDs indicate the demo selection states. The CH1 output allows the monitoring of one of the 5 inputs (IN A , IN B , IN C , IN D or O E ) of the MD1812/13 via the select button. The MD1812 and the MD1813 are very similar in function. The only differences between them are the control of the OE (MD1812) vs VLL (MD1813) pin and their logic functions. Please read their data sheets for the details. In this design example, the CPLD program is using an on-board solder jumper, R34, to sense the difference and works accordingly. The example MD1812/13 pulser circuit schematic, detailsignals definitions, and some measured waveforms areshown below.Waveform C, 20MHz, 8 cycles Load: 220pF//1kPulser Circuit SchematicWaveform AWaveform CWaveform BWaveform DOE INA INB INC INDHV OUTV PPV NNOE INA INB INC INDHV OUTV PPV NNOE INAINBINC INDHV OUTV PPV NNOEINAINBINC IND HV OUTV PPV NNNote: The duty cycle of the PW burst is set about 0.2% for limitedpower dissipationNote: The duty cycle of the PW burst is set about 25% at ≤5.0MHz forlimited power dissipation.AN-H56MD1812/13 Reference DesignJ 6X D C RJ E X = L oFig. 1 Waveform of 2.5MHz Fig. 2 Waveform of 5MHzFig. 3 Waveform of 10MHz Fig. 4 Waveform of 10MHz InvertingFig. 5 Waveform of 20MHz 8 Cycles Fig. 6 Waveform of 5mHz & Delay ReadingsFig. 7 Waveform of 10MHz(at IN C , OUT C , OUT G , and P- Gate, V DD = 12V, V NEG = -10V)Fig. 8 Waveform of 5MHz(at IN C , OUT C , OUT G , and P- Gate, V DD = 5V, V NEG = -10V)Supertex inc. does not recommend the use of its products in life support applications, and will not knowingly sell them for use in such applications unless it receives an adequate “product liability indemnification insurance agreement.” Supertex inc. does not assume responsibility for use of devices described, and limits its liability to the replacement of the devices determined defective due to workmanship. No responsibility is assumed for possible omissions and inaccuracies. Circuitry and specifications are subject to change without notice. For the latest product specifications refer to the Supertex inc. (website: http//)©2013 Supertex inc.All rights reserved. Unauthorized use or reproduction is prohibited.Supertex inc.。
电气控制英文参考文献(精选120个最新)

改革开放以来,随着我国工业的迅速发展和科学技术的进步,电气控制技术在工业上的运用也越来越广泛,对于一个国家的科技水平高低来说,电气控制技术水平是一项重要的衡量因素.电气控制技术主要以电动机作为注重的对象,通过一系列的电气控制技术,买现生产或者监控的自动化.下面是搜索整理的电气控制英文参考文献,欢迎借鉴参考。
电气控制英文参考文献一: [1]Laiqing Xie,Yugong Luo,Donghao Zhang,Rui Chen,Keqiang Li. Intelligent energy-saving control strategy for electric vehicle based on preceding vehicle movement[J]. Mechanical Systems andSignal Processing,2019,130. [2]F.N. Tan,Q.Y. Wong,W.L. Gan,S.H. Li,H.X. Liu,F. Poh,W.S. Lew. Electric field control for energy efficient domain wallinjection[J]. Journal of Magnetism and Magnetic Materials,2019,485. [3]N. Nursultanov,W.J.B. Heffernan,M.J.W.M.R. van Herel,J.J. Nijdam. Computational calculation of temperature and electrical resistance to control Joule heating of green Pinus radiata logs[J]. Applied Thermal Engineering,2019,159. [4]Min Cheng,Junhui Zhang,Bing Xu,Ruqi Ding,Geng Yang. Anti-windup scheme of the electronic load sensing pump via switchedflow/power control[J]. Mechatronics,2019,61. [5]Miles L. Morgan,Dan J. Curtis,Davide Deganello. Control of morphological and electrical properties of flexographic printed electronics through tailored ink rheology[J]. OrganicElectronics,2019,73. [6]Maciej ?awryńczuk,Pawe?Oc?oń. Model Predictive Control and energy optimisation in residential building with electric underfloor heating system[J]. Energy,2019,182. [7]Lorenzo Niccolai,Alessandro Anderlini,GiovanniMengali,Alessandro A. Quarta. Electric sail displaced orbit control with solar wind uncertainties[J]. Acta Astronautica,2019,162. [8]Patrik Beňo,Matej Kubi?. Control and stabilization of single-wheeled electric vehicle with BLDC engine[J]. Transportation Research Procedia,2019,40. [9]André Murilo,Rafael Rodrigues,Evandro Leonardo SilvaTeixeira,Max Mauro Dias Santos. Design of a Parameterized Model Predictive Control for Electric Power Assisted Steering[J]. Control Engineering Practice,2019,90. [10]Kazusa Yamamoto,Olivier Sename,Damien Koenig,Pascal Moulaire. Design and experimentation of an LPV extended state feedback control on Electric Power Steering systems[J]. Control EngineeringPractice,2019,90. [11]Pedro de A. Delou,Julia P.A. de Azevedo,Dinesh Krishnamoorthy,Maurício B. de Souza,Argimiro R. Secchi. Model Predictive Control with Adaptive Strategy Applied to an Electric Submersible Pump in a Subsea Environment[J]. IFACPapersOnLine,2019,52(1). [12]Unal Yilmaz,Omer Turksoy,Ahmet Teke. Intelligent control of high energy efficient two-stage battery charger topology forelectric vehicles[J]. Energy,2019,186. [13]Qiuyi Guo,Zhiguo Zhao,Peihong Shen,Xiaowen Zhan,Jingwei Li. Adaptive optimal control based on driving style recognition forplug-in hybrid electric vehicle[J]. Energy,2019,186. [14]Leonid Lobanov,Nikolai Pashсhin. Electrodynamic treatment by electric current pulses as effective method of control of stress-strain states and improvement of life of welded structures[J]. Procedia Structural Integrity,2019,16. [15]Evangelos Pournaras,Seoho Jung,Srivatsan Yadhunathan,Huiting Zhang,Xingliang Fang. Socio-technical smart grid optimization via decentralized charge control of electric vehicles[J]. Applied Soft Computing Journal,2019,82. [16]Guoming Huang,Xiaofang Yuan,Ke Shi,Xiru Wu. A BP-PID controller-based multi-model control system for lateral stability of distributed drive electric vehicle[J]. Journal of the Franklin Institute,2019,356(13). [17]Ioannis Kalogeropoulos,Haralambos Sarimveis. Predictive control algorithms for congestion management in electric power distribution grids[J]. Applied Mathematical Modelling,2020,77. [18]Junjun Zhu,Zhenpo Wang,Lei Zhang,David G. Dorrell.Braking/steering coordination control for in-wheel motor drive electric vehicles based on nonlinear model predictive control[J]. Mechanism and Machine Theory,2019,142. [19]Jiechen Wu,Junjie Hu,Xin Ai,Zhan Zhang,Huanyu Hu. Multi-time scale energy management of electric vehicle model-based prosumers by using virtual battery model[J]. Applied Energy,2019,251. [20]G. Coorey,D. Peiris,T. Usherwood,L. Neubeck,J. Mulley,J. Redfern. An Internet-Based Intervention Integrated with the Primary Care Electronic Health Record to Improve Cardiovascular Disease Risk Factor Control: a Mixed-Methods Evaluation of Acceptability, Usage Trends and Persuasive Design Characteristics[J]. Heart, Lung and Circulation,2019,28. [21]Félice Lê-Scherban,Lance Ballester,Juan C. Castro,Suzanne Cohen,Steven Melly,Kari Moore,James W. Buehler. Identifying neighborhood characteristics associated with diabetes and hypertension control in an urban African-American population usinggeo-linked electronic health records[J]. Preventive Medicine Reports,2019,15. [22]Yuekuan Zhou,Sunliang Cao. Energy flexibility investigation of advanced grid-responsive energy control strategies with thestatic battery and electric vehicles: A case study of a high-rise office building in Hong Kong[J]. Energy Conversion and Management,2019,199. [23]D. Aravindh,R. Sakthivel,B. Kaviarasan,S. MarshalAnthoni,Faris Alzahrani. Design of observer-based non-fragile load frequency control for power systems with electric vehicles[J]. ISA Transactions,2019,91. [24]Augusto Matheus dos Santos Alonso,Danilo IglesiasBrandao,Tommaso Caldognetto,Fernando Pinhabel Maraf?o,Paolo Mattavelli. A selective harmonic compensation and power control approach exploiting distributed electronic converters inmicrogrids[J]. International Journal of Electrical Power and Energy Systems,2020,115. [25]Hay Wong,Derek Neary,Eric Jones,Peter Fox,Chris Sutcliffe. Benchmarking spatial resolution in electronic imaging for potential in-situ Electron Beam Melting monitoring[J]. Additive Manufacturing,2019,29. [26]Yunfei Bai,Hongwen He,Jianwei Li,Shuangqi Li,Ya-xiong Wang,Qingqing Yang. Battery anti-aging control for a plug-in hybrid electric vehicle with a hierarchical optimization energy management strategy[J]. Journal of Cleaner Production,2019,237. [27]N. Samartin-Veiga,A.J. González-Villar,M.T. Carrillo-de-la-Pe?a. Neural correlates of cognitive dysfunction in fibromyalgia patients: Reduced brain electrical activity during the execution ofa cognitive control task[J]. NeuroImage: Clinical,2019,23. [28]Masato Nakaya,Shinta Watanabe,Jun Onoe. Control of electric, optical, thermal properties of C 60 films by electron-beam irradiation[J]. Carbon,2019,152. [29]R. Saadi,M.Y. Hammoudi,O. Kraa,M.Y. Ayad,M. Bahri. A robust control of a 4-leg floating interleaved boost converter for fuel cell electric vehicle application[J]. Mathematics and Computers in Simulation,2019. [30]Frederik Banis,Daniela Guericke,Henrik Madsen,Niels Kj?lstad Poulsen. Supporting power balance in Microgrids with Uncertain Production using Electric Vehicles and Indirect Control ? ? This work has been supported by ENERGINET.DK under the project microgrid positioning - uGrip and the CITIES project.[J]. IFAC PapersOnLine,2019,52(4). 电气控制英文参考文献二: [31]Huijuan Luo,Jinpeng Yu,Chong Lin,Zhanjie Liu,Lin Zhao,Yumei Ma. Finite-time dynamic surface control for induction motors with input saturation in electric vehicle drive systems[J]. Neurocomputing,2019. [32]Peter K. Joseph,D. Elangovan,G. Arunkumar. Linear control of wireless charging for electric bicycles[J]. Applied Energy,2019,255. [33]Yu Congyang,Zhu Dequan,Wang Chaoxian,Zhu Lin,Chu Tingting,Jen Tien-Chien,Liao Juan. Optimizing Electric Adjustment Mechanism Using the Combination of Multi-body Dynamics and Control[J]. Procedia Manufacturing,2019,35. [34]Hussein Termous,Xavier Moreau,Clovis Francis,Hassan Shraim. Effect of fractional order damping control on braking performancefor electric vehicles ? ? This work was supported by the Lebanese research program and the AUF-CNRSL-UL program.[J]. IFAC PapersOnLine,2019,52(5). [35]Manuel Schwartz,Florian Siebenrock,S?ren Hohmann. Model Predictive Control Allocation of an Over-actuated Electric Vehicle with Single Wheel Actuators[J]. IFAC PapersOnLine,2019,52(8). [36]Di Wu,Nikitha Radhakrishnan,Sen Huang. A hierarchical charging control of plug-in electric vehicles with simpleflexibility model[J]. Applied Energy,2019,253. [37]Abhishek Nayak,Rubi Rana,Sukumar Mishra. Frequency Regulation by Electric Vehicle during Grid Restoration using Adaptive Optimal Control[J]. IFAC PapersOnLine,2019,52(4). [38]Nicolò Robuschi,Mauro Salazar,Pol Duhr,FrancescoBraghin,Christopher H. Onder. Minimum-fuel Engine On/Off Control for the Energy Management of a Hybrid Electric Vehicle via Iterative Linear Programming ? ? We thank Ferrari S.p.A. for supporting this project.[J]. IFAC PapersOnLine,2019,52(5). [39]Anas A. Ahmed,M.R. Hashim,Marzaini Rashid. Control of the structural, electrical and optical properties of spin coated NiO films by varying precursor molarity[J]. Thin Solid Films,2019,690. [40]Wilco van Harselaar,Niels Schreuders,Theo Hofman,Stephan Rinderknecht. Improved Implementation of Dynamic Programming on the Example of Hybrid Electric Vehicle Control[J]. IFACPapersOnLine,2019,52(5). [41]Jose A. Matute,Mauricio Marcano,Sergio Diaz,Joshue Perez. Experimental Validation of a Kinematic Bicycle Model Predictive Control with Lateral Acceleration Consideration ? ? This project has received funding from the Electronic Component Systems for European Leadership Joint Undertaking under grant agreement No 737469 (AutoDrive Project). This Joint Undertaking receives support fromthe European Union Horizon 2020 research and innovation programmeand Germany, Austria, Spain, Italy, Latvia, Belgium, Netherlands, Sweden, Finland, Lithuania, Czech Republic, Romania,[J]. IFAC PapersOnLine,2019,52(8). [42]Vladislav S. Gromov,Oleg I. Borisov,Sergey S. Shavetov,AntonA. Pyrkin,FatimatB. Karashaeva. Modeling and Control of Robotic Systems Course: from Fundamentals to Applications ? ? The work was written with the support of the Ministry of Science and Higher Education of the Russian Federation, project unique identifier RFMEFI57818X0271 “Adaptive Sensorless Control for Synchronous Electric Drives in Intelligent Robotics and Transport Systems”.[J]. IFAC PapersOnLine,2019,52(9). [43]H. Mbarak,A.K. Kodeary,S.M. Hamidi,E. Mohajarani,Y. Zaatar. Control of nonlinear refractive index of AuNPs doped with nematic liquid crystal under external electric field[J]. Optik,2019,198. [44]Yanzhao Jia,Rabee Jibrin,Yutaro Itoh,Daniel G?rges. Energy-Optimal Adaptive Cruise Control for Electric Vehicles in Both Time and Space Domain based on Model Predictive Control[J]. IFAC PapersOnLine,2019,52(5). [45]Lukas Engbroks,Daniel G?rke,Stefan Schmiedler,TobiasG?decke,Bastian Beyfuss,Bernhard Geringer. Combined energy and thermal management for plug-in hybrid electric vehicles -analyses based on optimal control theory ? ? This work has been performed within the Daimler AG in Stuttgart, Germany in cooperation with the Institute for Powertrains and Automotive Technology at Vienna University of Technology, Austria.[J]. IFAC PapersOnLine,2019,52(5). [46]Jean Kuchly,Dominique Nelson-Gruel,Alain Charlet,Yann Chamaillard,Cédric Nouillant. Projected Gradient and ModelPredictive Control : Optimal Energy and Pollutants Management for Hybrid Electric Vehicle[J]. IFAC PapersOnLine,2019,52(5). [47]Pier Giuseppe Anselma,Yi Huo,Joel Roeleveld,Giovanni Belingardi,Ali Emadi. From Off-line to On-line Control of a Multimode Power Split Hybrid Electric Vehicle Powertrain[J]. IFAC PapersOnLine,2019,52(5). [48]Xiaoyong Zhu,Deyang Fan,Zixuan Xiang,Li Quan,Wei Hua,Ming Cheng. Systematic multi-level optimization design and dynamiccontrol of less-rare-earth hybrid permanent magnet motor for all-climatic electric vehicles[J]. Applied Energy,2019,253. [49]. Engineering - Industrial Engineering; Findings from Southwest Jiaotong University Provides New Data about Industrial Engineering (Optimal Energy Management and Control In Multimode Equivalent Energy Consumption of Fuel Cell/supercapacitor of Hybrid Electric Tram)[J]. Energy Weekly News,2019. [50]. SK Planet Co. Ltd.; Patent Issued for Electronic Stamp System For Security Intensification, Control Method Thereof, And Non-Transitory Computer Readable Storage Medium Having ComputerProgram Recorded Thereon (USPTO 10,361,857)[J]. Computers, Networks & Communications,2019. [51]. Energy - Electric Power; Study Data from National Institute of Technology Calicut Update Understanding of Electric Power (Modified switching scheme-based explicit torque control of brush-less direct current motor drive)[J]. Energy Weekly News,2019. [52]. Energy; Findings from School of Mechanical Engineering Reveals New Findings on Energy (Deep Reinforcement Learning of Energy Management With Continuous Control Strategy and Traffic Information for a Series-parallel Plug-in Hybrid Electric Bus)[J]. Energy Weekly News,2019. [53]. Energy - Electric Power; Reports Outline Electric Power Study Results from Dalian Maritime University (Direct VoltageControl of Stand-alone Dfig Under Asymmetric Loads Based On Non-singular Terminal Sliding Mode Control and Improved Extended State Observer)[J]. Energy Weekly News,2019. [54]. Energy - Electric Power; Studies from Xi'an Jiao Tong University Add New Findings in the Area of Electric Power (A model predictive control approach for matching uncertain wind generation with PEV charging demand in a microgrid)[J]. Energy WeeklyNews,2019. [55]. Energy - Electric Power; Researchers from Northwestern Polytechnical University Discuss Findings in Electric Power (Decoupling Start Control Method for Aircraft Wound-rotor Synchronous Starter-generator Based On Main Field Current Estimation)[J]. Energy Weekly News,2019. [56]. Energy - Electric Power; Wuhan University Reports Findings in Electric Power (Adjustable virtual inertia control of supercapacitors in PV-based AC microgrid cluster)[J]. Energy Weekly News,2019. [57]. Lg Electronic Inc.; Researchers Submit Patent Application, "Method And Apparatus For Monitoring Control Channel In Unlicensed Band", for Approval (USPTO 20190229825)[J]. Computers, Networks & Communications,2019. [58]. Special Conditions: Pilatus Aircraft Ltd., Model PC-12/47E Airplanes; Electronic Engine Control System Installation[J]. The Federal Register / FIND,2019,84(158). [59]. Apple Inc.; Patent Issued for Offset Control For Assembling An Electronic Device Housing (USPTO 10,368,457)[J]. Computers, Networks & Communications,2019. [60]. Mitsubishi Electric Corporation; Researchers Submit Patent Application, "Synchronization Control System And Control Device",for Approval (USPTO 20190238071)[J]. Computers, Networks & Communications,2019. 电气控制英文参考文献三: [61]. Technology - Cybernetics; Findings from North ChinaElectric Power University Provides New Data about Cybernetics (Hierarchical Distributed Model Predictive Control of Standalone Wind/solar/battery Power System)[J]. Energy Weekly News,2019. [62]. Nidec Corporation; "Motor Control System And Electric Power Steering System" in Patent Application Approval Process (USPTO 20190233002)[J]. Energy Weekly News,2019. [63]. Mobvoi Information Technology Co. LTD.; Researchers Submit Patent Application, "Display Device, Electronic Device And Display Control Method For Screen", for Approval (USPTO 20190235540)[J]. Computers, Networks & Communications,2019. [64]. Engineering - Power Delivery; Studies from North China Electric Power University Have Provided New Data on Power Delivery (Fault Tripping Criteria In Stability Control Device Adapting ToHalf-wavelength Ac Transmission Line)[J]. Energy Weekly News,2019. [65]. Samsung Electronics Co. Ltd.; "Electronic Device For Sensing Biometric Information And Control Method Thereof" in Patent Application Approval Process (USPTO 20190231235)[J]. Medical Patent Business Week,2019. [66]Asiabar Aria Noori,Kazemi Reza. A direct yaw momentcontroller for a four in-wheel motor drive electric vehicle using adaptive sliding mode control[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(3). [67]. Energy - Electrical Energy Systems; New Electrical Energy Systems Findings Has Been Reported by Investigators at University of Sfax (Constrained design and control of trapezoidal waves-forms hybrid excitation synchronous motor increasing energy accumulator lifetime)[J]. Energy Weekly News,2019. [68]. Energy; Findings from School of Mechanical Engineering Has Provided New Data on Energy (Considering Well-to-Wheels Analysis in Control Design: Regenerative Suspension Helps to Reduce Greenhouse Gas Emissions from Battery Electric Vehicles)[J]. Energy Weekly News,2019. [69]. Mitsubishi Electric Corporation; Patent Application Titled "Electric-Power Control Device, Electric Motor, Air-Conditioning Apparatus, And Method For Manufacturing Electric Motor" Published Online (USPTO 20190242594)[J]. Energy Weekly News,2019. [70]. Energy; Reports Summarize Energy Study Results from Warsaw University of Technology (Model Predictive Control and energy optimisation in residential building with electric underfloorheating system)[J]. Energy Weekly News,2019. [71]. Energy - Nuclear Power; Researchers from Korea Electric Power Corporation Report New Studies and Findings in the Area of Nuclear Power (Development of Anti-windup Pi Control and Bumpless Control Transfer Methodology for Feedwater Control System)[J]. Energy Weekly News,2019. [72]. Energy - Electric Power; Data on Electric Power Discussed by Researchers at School of Electrical and Electronics Engineering (Analysis of the Performance Characteristics and Arm Current Control for Modular Multilevel Converter With Asymmetric Arm Parameters)[J]. Energy Weekly News,2019. [73]. Energy - Electric Power; Study Findings on Electric Power Are Outlined in Reports from University of Technology (Direct power control for VSC-HVDC systems: An application of the global tracking passivity-based PI approach)[J]. Energy Weekly News,2019. [74]Allous Manel,Mrabet Kais,Zanzouri Nadia. Fast fault-tolerant control of electric power steering systems in the presence of actuator fault[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(12). [75]. Energy - Electric Power; Researchers from College of Engineering Detail New Studies and Findings in the Area of Electric Power (Power Control Strategy of Photovoltaic Plants for Frequency Regulation In a Hybrid Power System)[J]. Energy Weekly News,2019. [76]. Energy - Electric Power; Researchers at Shiv Nadar University Report New Data on Electric Power (Methods for overcoming misalignment effects and charging control of a dynamic wireless electric vehicle charging system)[J]. Energy Weekly News,2019. [77]Zhang Bing,Zong Changfu,Chen Guoying,Li Guiyuan. An adaptive-prediction-horizon model prediction control for path tracking in a four-wheel independent control electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(12). [78]Ren Yue,Zheng Ling,Yang Wei,Li Yinong. Potential field–based hierarchical adaptive cruise control for semi-autonomous electric vehicle[J]. Proceedings of the Institution of MechanicalEngineers,2019,233(10). [79]. Energy - Electric Power; Data from University of the Basque Country Advance Knowledge in Electric Power (Sliding Mode Control of an Active Power Filter With Photovoltaic Maximum Power Tracking)[J]. Energy Weekly News,2019. [80]Izadbakhsh Alireza,Kheirkhahan Payam. Adaptive fractional-order control of electrical flexible-joint robots: Theory and experiment[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(9). [81]Yang Weiwei,Liang Jiejunyi,Yang Jue,Zhang Nong. Optimal control of a novel uninterrupted multi-speed transmission for hybrid electric mining trucks[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(12). [82]Guercioni Guido Ricardo,Vigliani Alessandro. Gearshiftcontrol strategies for hybrid electric vehicles: A comparison of powertrains equipped with automated manual transmissions and dual-clutch transmissions[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(11). [83]. Energy - Electric Power; Findings from PontificalUniversity Provides New Data on Electric Power (A Communication-free Reactive-power Control Strategy In Vsc-hvdc Multi-terminal Systems To Improve Transient Stability)[J]. Energy Weekly News,2019. [84]. Energy - Electric Power; Findings from Yazd University in the Area of Electric Power Reported (An adaptive time-graded control method for VSC-MTDC networks)[J]. Energy Weekly News,2019. [85]Liu Hui,Li Xunming,Wang Weida,Han Lijin,Xin Huibin,Xiang Changle. Adaptive equivalent consumption minimisation strategy and dynamic control allocation-based optimal power management strategy for four-wheel drive hybrid electric vehicles[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(12). [86]. Networks - Neural Networks; Findings on Neural Networks Reported by Investigators at School of Electrical Engineering and Automation (Stability Analysis of Fractional Order Hopfield Neural Networks With Optimal Discontinuous Control)[J]. Computers, Networks & Communications,2019. [87]. Energy - Electric Power; Researchers from NanjingUniversity of Aeronautics and Astronautics Describe Findings in Electric Power (Synchronous Vibration Control for a Class of Cross-coupled Antisymmetric Msr Systems)[J]. Energy Weekly News,2019. [88]. Energy - Electric Power; Investigators at Chung Ang University Detail Findings in Electric Power (Flexible Risk Control Strategy Based On Multi-stage Corrective Action With Energy Storage System)[J]. Energy Weekly News,2019. [89]. Energy - Electric Power; Findings in Electric Power Reported from National Institute of Technology (An adaptive PI control scheme to balance the neutral-point voltage in a solar PV fed grid connected neutral point clamped inverter)[J]. Energy Weekly News,2019. [90]Najjari Behrouz,Mirzaei Mehdi,Tahouni Amin. Constrained stability control with optimal power management strategy for in-wheel electric vehicles[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(4). 电气控制英文参考文献四: [91]. Energy - Wind Farms; Investigators at School of Electrical Power Detail Findings in Wind Farms (Theoretical Study On Control Strategy of Grid-connected High Voltage Ride Through In Doubly-fed Wind Farm)[J]. Energy Weekly News,2019. [92]. Kia Motors Corporation; Patent Issued for Wireless Charging Control Apparatus And Method For Optimal Charging By Adjusting The Inclination Of The Electric Vehicle Being Charged (USPTO10,399,449)[J]. Computers, Networks & Communications,2019. [93]. Energy; New Data from Institute of Electrical Engineering Illuminate Findings in Energy (Charging-Discharging Control Strategy for a Flywheel Array Energy Storage System Based on the Equal Incremental Principle)[J]. Energy Weekly News,2019. [94]. Science - Applied Sciences; Findings from North China Electric Power University Broaden Understanding of Applied Sciences (Coordinated Frequency Control Strategy with the Virtual Battery Model of Inverter Air Conditionings)[J]. Science Letter,2019. [95]. Science - Materials Science; Studies from Tsinghua University in the Area of Materials Science Described (ElectricField Control of Neel Spin-orbit Torque In an Antiferromagnet)[J]. Science Letter,2019. [96]. Electronics - Power Electronics; Studies from Nanjing University of Aeronautics and Astronautics Have Provided New Data on Power Electronics (Wireless battery charging control for electric vehicles: a user-involved approach)[J]. Computers, Networks & Communications,2019. [97]Kivanc,Ustun. Dynamic control of electronic differential in the field weakening region[J]. International Journal ofElectronics,2019,106(10). [98]Mohit Batra,John McPhee,Nasser L. Azad. Real-time model predictive control of connected electric vehicles[J]. Vehicle System Dynamics,2019,57(11). [99]Kim Daihyun,Echelmeier Austin,Cruz Villarreal Jorvani,Gandhi Sahir,Quintana Sebastian,Egatz-Gomez Ana,Ros Alexandra. Electric Triggering for Enhanced Control of Droplet Generation.[J].Analytical chemistry,2019,91(15). [100]Kurien Caneon,Srivastava Ajay Kumar. Impact of Electric Vehicles on Indirect Carbon Emissions and Role of Engine Post-Treatment Emission Control Strategies.[J]. Integrated environmental assessment and management,2019. [101]Aravindh D,Sakthivel R,Kaviarasan B,Anthoni SMarshal,Alzahrani Faris. Design of observer-based non-fragile loadfrequency control for power systems with electric vehicles.[J]. ISA transactions,2019,91. [102]Chen Xianzhe,Zhou Xiaofeng,Cheng Ran,Song Cheng,Zhang Jia,Wu Yichuan,Ba You,Li Haobo,Sun Yiming,You Yunfeng,Zhao Yonggang,Pan Feng. Electric field control of Néel spin-orbit torque in an antiferromagnet.[J]. Nature materials,2019,18(9). [103]Lê-Scherban Félice,Ballester Lance,Castro Juan C,Cohen Suzanne,Melly Steven,Moore Kari,Buehler James W. Identifying neighborhood characteristics associated with diabetes and hypertension control in an urban African-American population using geo-linked electronic health records.[J]. Preventive medicine reports,2019,15. [104]Samartin-Veiga N,González-Villar A J,Carrillo-de-la-Pe?a M T. Neural correlates of cognitive dysfunction in fibromyalgia patients: Reduced brain electrical activity during the execution of a cognitive control task.[J]. NeuroImage. Clinical,2019,23. [105]Leibel Sydney,Weber Rachel. Utilizing a PhysicianNotification System in the EPIC Electronic Medical Record to Improve Pediatric Asthma Control: A Quality Improvement Project.[J].Clinical pediatrics,2019,58(11-12). [106]Bernacka-Wojcik Iwona,Huerta Miriam,Tybrandt Klas,Karady Michal,Mulla Mohammad Yusuf,Poxson David J,Gabrielsson Erik O,Ljung Karin,Simon Daniel T,Berggren Magnus,Stavrinidou Eleni. Implantable Organic Electronic Ion Pump Enables ABA Hormone Delivery for Control of Stomata in an Intact Tobacco Plant.[J]. Small (Weinheim an der Bergstrasse, Germany),2019. [107]Stoynova Nevena,Laske Christoph,Plewnia Christian. Combining electrical stimulation and cognitive control training to reduce concerns about subjective cognitive decline.[J]. Brainstimulation,2019,12(4). [108]Bettano Amy,Land Thomas,Byrd Alice,Svencer Susan,Nasuti Laura. Using Electronic Referrals to Address Health Disparities and Improve Blood Pressure Control.[J]. Preventing chronicdisease,2019,16. [109]Xu Meng,Yan Jian-Min,Guo Lei,Wang Hui,Xu Zhi-Xue,Yan Ming-Yuan,Lu Yun-Long,Gao Guan-Yin,Li Xiao-Guang,Luo Hao-Su,ChaiYang,Zheng Ren-Kui. Nonvolatile Control of the Electronic Properties of In<sub>2- x </sub>Cr<sub> x </sub>O<sub>3</sub> Semiconductor Films by Ferroelectric Polarization Charge.[J]. ACS appliedmaterials & interfaces,2019,11(35). [110]Gao Tao,Mirzadeh Mohammad,Bai Peng,Conforti Kameron M,Bazant Martin Z. Active control of viscous fingering using electricfields.[J]. Nature communications,2019,10(1). [111]Chaux Robin,Treussier Isabelle,Audeh Bissan,Pereira Suzanne,Hengoat Thierry,Paviot Béatrice Trombert,Bousquet Cedric. Automated Control of Codes Accuracy in Case-Mix Databases by Evaluating Coherence with Available Information in the Electronic Health Record.[J]. Studies in health technology andinformatics,2019,264. [112]Bolat Mustafa Suat,Cinar Onder,Asci Ramazan,Buyukalpelli Recep. A novel method for pain control: infiltration free local anesthesia technique (INFLATE) for transrectal prostatic biopsy using transcutaneous electrical nerve stimulation (TENS).[J]. International urology and nephrology,2019. [113]Cruz Chad D,Yuan Jennifer,Climent Clàudia,Tierce NathanT,Christensen Peter R,Chronister Eric L,Casanova David,Wolf Michael O,Bardeen Christopher J. Using sulfur bridge oxidation to control electronic coupling and photochemistry in covalent anthracene dimers.[J]. Chemical science,2019,10(32). [114]Zhou Canliang,Sun Linfeng,Zhang Fengquan,Gu Chenjie,Zeng Shuwen,Jiang Tao,Shen Xiang,Ang Diing Shenp,Zhou Jun. Electrical Tuning of the SERS Enhancement by Precise Defect DensityControl.[J]. ACS applied materials & interfaces,2019,11(37). [115]Taeho Park,Hyeongcheol Lee. Optimal Supervisory Control Strategy for a Transmission-Mounted Electric Drive Hybrid Electric Vehicle[J]. International Journal of AutomotiveTechnology,2019,20(4). [116]Zoé Magalh?es,André Murilo,Renato V. Lopes. Development and evaluation with MIL and HIL simulations of a LQR-based upper-level electronic stability control[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering,2019,41(8). [117]Justin Roger Mboupda Pone,Victor Kamdoum Tamba,Guillaume Honore Kom,Mathieu Jean Pierre Pesdjock,Alain Tiedeu,Martin Kom. Numerical, electronic simulations and experimental analysis of a no-equilibrium point chaotic circuit with offset boosting and partial amplitude control[J]. SN Applied Sciences,2019,1(8). [118]Alberto Cavallo,Antonio Russo,Giacomo Canciello.Hierarchical control for generator and battery in the more electric aircraft[J]. Science China Information Sciences,2019,62(9). [119]Ying Liu,Kai Cao,Jingjun Liu,Zhengping Zhang,Jing Ji,Feng Wang,Zhilin Li. Electrodeposition of copper-doped SnS thin films and their electric transmission properties control for thermoelectric enhancement[J]. Journal of Materials Science: Materials in Electronics,2019,30(17). [120]Feng Tian,Liqi Sui,Yuanfan Zeng,Bo Li,Xingyue Zhou,Lijun Wang,Hongxu Chen. Hardware Design and Test of a Gear-ShiftingControl System of a Multi-gear Transmission for ElectricVehicles[J]. Automotive Innovation,2019,2(3).。
机械设计专业英语

机械设计专业英语机械设计专业英语圆柱螺旋扭转弹簧cylindroid helical-coil torsion spring圆柱螺旋压缩弹簧cylindroid helical-coil compression spring 圆柱凸轮cylindrical cam圆柱蜗杆cylindrical worm圆柱坐标操作器cylindrical coordinate manipulator圆锥螺旋扭转弹簧conoid helical-coil compression spring 圆锥滚子tapered roller圆锥滚子轴承tapered roller bearing圆锥齿轮机构bevel gears圆锥角cone angle原动件driving link约束constraint约束条件constraint condition约束反力constraining force跃度jerk跃度曲线jerk diagram运动倒置kinematic inversion运动方案设计kinematic precept design运动分析kinematic analysis运动副kinematic pair运动构件moving link运动简图kinematic sketch运动链kinematic chain运动失真undercutting运动设计kinematic design运动周期cycle of motion运动综合kinematic synthesis运转不均匀系数coefficient of velocity fluctuation运动粘度kenematic viscosity载荷load载荷—变形曲线load—deformation curve 载荷—变形图load—deformation diagram 窄V 带narrow V belt毡圈密封felt ring seal展成法generating张紧力tension 张紧轮tension pulley振动vibration振动力矩shaking couple振动频率frequency of vibration振幅amplitude of vibration正切机构tangent mechanism正向运动学direct (forward) kinematics正弦机构sine generator, scotch yoke织布机loom正应力、法向应力normal stress制动器brake直齿圆柱齿轮spur gear直齿锥齿轮straight bevel gear直角三角形right triangle直角坐标操作器Cartesian coordinate manipulator直径系数diametral quotient直径系列diameter series直廓环面蜗杆hindley worm直线运动linear motion直轴straight shaft质量mass质心center of mass执行构件executive link; working link质径积mass-radius product智能化设计intelligent design, ID中间平面mid-plane中心距center distance中心距变动center distance change中心轮central gear中径mean diameter终止啮合点final contact, end of contact周节pitch周期性速度波动periodic speed fluctuation 周转轮系epicyclic gear train肘形机构toggle mechanism轴shaft轴承盖bearing cup轴承合金bearing alloy轴承座bearing block轴承高度bearing height轴承宽度bearing width轴承内径bearing bore diameter轴承寿命bearing life轴承套圈bearing ring轴承外径bearing outside diameter轴颈journal轴瓦、轴承衬bearing bush轴端挡圈shaft end ring轴环shaft collar轴肩shaft shoulder轴角shaft angle轴向axial direction轴向齿廓axial tooth profile轴向当量动载荷dynamic equivalent axial load轴向当量静载荷static equivalent axial load 轴向基本额定动载荷basic dynamic axial load rating轴向基本额定静载荷basic static axial load rating轴向接触轴承axial contact bearing轴向平面axial plane轴向游隙axial internal clearance轴向载荷axial load轴向载荷系数axial load factor轴向分力axial thrust load主动件driving link主动齿轮driving gear主动带轮driving pulley转动导杆机构whitworth mechanism转动副revolute (turning) pair转速swiveling speed ; rotating speed转动关节revolute joint转轴revolving shaft转子rotor转子平衡balance of rotor装配条件assembly condition锥齿轮bevel gear锥顶common apex of cone锥距cone distance锥轮bevel pulley; bevel wheel锥齿轮的当量直齿轮equivalent spur gear of the bevel gear 锥面包络圆柱蜗杆milled helicoids worm准双曲面齿轮hypoid gear子程序subroutine 子机构sub-mechanism自动化automation自锁self-locking自锁条件condition of self-locking自由度degree of freedom, mobility总重合度total contact ratio总反力resultant force总效率combined efficiency; overall efficiency组成原理theory of constitution组合齿形composite tooth form组合安装stack mounting组合机构combined mechanism阻抗力resistance最大盈亏功maximum difference work between plus and minus work纵向重合度overlap contact ratio纵坐标ordinate组合机构combined mechanism最少齿数minimum teeth number最小向径minimum radius作用力applied force坐标系coordinate frame行星轮变速装置planetary speed changing devices行星轮系planetary gear train形封闭凸轮机构positive-drive (or form-closed) cam mechanism虚拟现实virtual reality虚拟现实技术virtual reality technology, VRT虚拟现实设计virtual reality design, VRD虚约束redundant (or passive) constraint许用不平衡量allowable amount of unbalance许用压力角allowable pressure angle许用应力allowable stress; permissible stress 悬臂结构cantilever structure悬臂梁cantilever beam循环功率流circulating power load旋转力矩running torque旋转式密封rotating seal旋转运动rotary motion选型type selection压力pressure压力中心center of pressure压缩机compressor压应力compressive stress压力角pressure angle牙嵌式联轴器jaw (teeth) positive-contact coupling雅可比矩阵Jacobi matrix摇杆rocker液力传动hydrodynamic drive液力耦合器hydraulic couplers液体弹簧liquid spring液压无级变速hydraulic stepless speed changes液压机构hydraulic mechanism一般化运动链generalized kinematic chain 移动从动件reciprocating follower移动副prismatic pair, sliding pair移动关节prismatic joint移动凸轮wedge cam盈亏功increment or decrement work应力幅stress amplitude应力集中stress concentration应力集中系数factor of stress concentration 应力图stressdiagram应力—应变图stress-strain diagram优化设计optimal design油杯oil bottle油壶oil can油沟密封oily ditch seal有害阻力useless resistance有益阻力useful resistance有效拉力effective tension有效圆周力effective circle force有害阻力detrimental resistance余弦加速度运动cosine acceleration (or simple harmonic) motion预紧力preload原动机primer mover圆带round belt圆带传动round belt drive圆弧齿厚circular thickness 圆弧圆柱蜗杆hollow flank worm 圆角半径fillet radius圆盘摩擦离合器disc friction clutch圆盘制动器disc brake原动机prime mover原始机构original mechanism圆形齿轮circular gear圆柱滚子cylindrical roller圆柱滚子轴承cylindrical roller bearing圆柱副cylindric pair圆柱式凸轮步进运动机构barrel (cylindric) cam圆柱螺旋拉伸弹簧cylindroid helical-coil extension spring凸轮cam凸轮倒置机构inverse cam mechanism凸轮机构cam , cam mechanism凸轮廓线cam profile凸轮廓线绘制layout of cam profile凸轮理论廓线pitch curve凸缘联轴器flange coupling图册、图谱atlas图解法graphical method推程rise推力球轴承thrust ball bearing推力轴承thrust bearing退刀槽tool withdrawal groove退火anneal陀螺仪gyroscopeV 带V belt外力external force外圈outer ring外形尺寸boundary dimension万向联轴器Hooks coupling ; universal coupling外齿轮external gear弯曲应力beading stress弯矩bending moment腕部wrist往复移动reciprocating motion往复式密封reciprocating seal网上设计on-net design, OND微动螺旋机构differential screw mechanism 位移displacement 位移曲线displacement diagram位姿pose , position and orientation稳定运转阶段steady motion period稳健设计robust design蜗杆worm蜗杆传动机构worm gearing蜗杆头数number of threads蜗杆直径系数diametral quotient蜗杆蜗轮机构worm and worm gear蜗杆形凸轮步进机构worm cam interval mechanism蜗杆旋向hands of worm蜗轮worm gear涡圈形盘簧power spring无级变速装置stepless speed changes devices无穷大infinite系杆crank arm, planet carrier现场平衡field balancing向心轴承radial bearing向心力centrifugal force相对速度relative velocity相对运动relative motion相对间隙relative gap象限quadrant橡皮泥plasticine细牙螺纹fine threads销pin消耗consumption小齿轮pinion小径minor diameter橡胶弹簧balata spring修正梯形加速度运动规律modified trapezoidal acceleration motion修正正弦加速度运动规律modified sine acceleration motion斜齿圆柱齿轮helical gear斜键、钩头楔键taper key泄漏leakage谐波齿轮harmonic gear谐波传动harmonic driving谐波发生器harmonic generator 斜齿轮的当量直齿轮equivalent spur gear of the helical gear心轴spindle行程速度变化系数coefficient of travel speed variation行程速比系数advance-to return-time ratio 行星齿轮装置planetary transmission行星轮planet gear平衡机balancing machine平衡品质balancing quality平衡平面correcting plane平衡质量balancing mass平衡重counterweight平衡转速balancing speed平面副planar pair, flat pair平面机构planar mechanism平面运动副planar kinematic pair平面连杆机构planar linkage平面凸轮planar cam平面凸轮机构planar cam mechanism平面轴斜齿轮parallel helical gears普通平键parallel key其他常用机构other mechanism in common use起动阶段starting period启动力矩starting torque气动机构pneumatic mechanism奇异位置singular position起始啮合点initial contact , beginning of contact气体轴承gas bearing千斤顶jack嵌入键sunk key强迫振动forced vibration切齿深度depth of cut曲柄crank曲柄存在条件Grashoff`s law曲柄导杆机构crank shaper (guide-bar) mechanism曲柄滑块机构slider-crank (or crank-slider) mechanism 曲柄摇杆机构crank-rocker mechanism曲齿锥齿轮spiral bevel gear曲率curvature曲率半径radius of curvature曲面从动件curved-shoe follower曲线拼接curve matching曲线运动curvilinear motion曲轴crank shaft驱动力driving force驱动力矩driving moment (torque)全齿高whole depth权重集weight sets球ball球面滚子convex roller球轴承ball bearing球面副spheric pair球面渐开线spherical involute球面运动spherical motion球销副sphere-pin pair球坐标操作器polar coordinate manipulator 燃点spontaneous ignition热平衡heat balance; thermal equilibrium人字齿轮herringbone gear冗余自由度redundant degree of freedom柔轮flexspline柔性冲击flexible impulse; soft shock柔性制造系统flexible manufacturing system; FMS柔性自动化flexible automation润滑油膜lubricant film润滑装置lubrication device润滑lubrication润滑剂lubricant三角形花键serration spline三角形螺纹V thread screw三维凸轮three-dimensional cam三心定理Kennedy`s theorem砂轮越程槽grinding wheel groove砂漏hour-glass少齿差行星传动planetary drive with small teeth difference设计方法学design methodology设计变量design variable设计约束design constraints深沟球轴承deep groove ball bearing生产阻力productive resistance 升程rise升距lift螺旋角helix angle螺旋线helix ,helical line绿色设计green design ; design for environment马耳他机构Geneva wheel ; Geneva gear马耳他十字Maltese cross脉动无级变速pulsating stepless speed changes脉动循环应力fluctuating circulating stress 脉动载荷fluctuating load铆钉rivet迷宫密封labyrinth seal密封seal密封带seal belt密封胶seal gum密封元件potted component密封装置sealing arrangement面对面安装face-to-face arrangement面向产品生命周期设计design for product`s life cycle, DPLC 名义应力、公称应力nominal stress模块化设计modular design, MD模块式传动系统modular system模幅箱morphology box模糊集fuzzy set模糊评价fuzzy evaluation模数module摩擦friction摩擦角friction angle摩擦力friction force摩擦学设计tribology design, TD摩擦阻力frictional resistance摩擦力矩friction moment摩擦系数coefficient of friction摩擦圆friction circle磨损abrasion ;wear; scratching末端执行器end-effector目标函数objective function耐腐蚀性corrosion resistance耐磨性wear resistance挠性机构mechanism with flexible elements挠性转子flexible rotor内齿轮internal gear内齿圈ring gear内力internal force内圈inner ring能量energy能量指示图viscosity逆时针counterclockwise (or anticlockwise) 啮出engaging-out 啮合engagement, mesh, gearing啮合点contact points啮合角working pressure angle啮合线line of action啮合线长度length of line of action啮入engaging-in牛头刨床shaper凝固点freezing point; solidifying point扭转应力torsion stress扭矩moment of torque扭簧helical torsion spring诺模图NomogramO 形密封圈密封O ring seal盘形凸轮disk cam盘形转子disk-like rotor抛物线运动parabolic motion疲劳极限fatigue limit疲劳强度fatigue strength偏置式offset偏( 心) 距offset distance偏心率eccentricity ratio偏心质量eccentric mass偏距圆offset circle偏心盘eccentric偏置滚子从动件offset roller follower偏置尖底从动件offset knife-edge follower 偏置曲柄滑块机构offset slider-crank mechanism拼接matching评价与决策evaluation and decision频率frequency平带flat belt平带传动flat belt driving平底从动件flat-face follower平底宽度face width 平分线bisector平均应力average stress平均中径mean screw diameter平均速度average velocity平衡balance可靠度degree of reliability可靠性reliability可靠性设计reliability design, RD空气弹簧air spring空间机构spatial mechanism空间连杆机构spatial linkage空间凸轮机构spatial cam空间运动副spatial kinematic pair空间运动链spatial kinematic chain空转idle宽度系列width series框图block diagram雷诺方程Reynolds‘s equation离心力centrifugal force离心应力centrifugal stress离合器clutch离心密封centrifugal seal理论廓线pitch curve理论啮合线theoretical line of action隶属度membership力force力多边形force polygon力封闭型凸轮机构force-drive (or force-closed) cam mechanism力矩moment力平衡equilibrium力偶couple力偶矩moment of couple连杆connecting rod, coupler连杆机构linkage连杆曲线coupler-curve连心线line of centers链chain链传动装置chain gearing链轮sprocket ; sprocket-wheel ; sprocket gear ; chain wheel 联组V 带tight-up V belt联轴器coupling ; shaft coupling两维凸轮two-dimensional cam临界转速critical speed六杆机构six-bar linkage龙门刨床double Haas planer轮坯blank轮系gear train螺杆screw螺距thread pitch螺母screw nut螺旋锥齿轮helical bevel gear螺钉screws螺栓bolts螺纹导程lead螺纹效率screw efficiency螺旋传动power screw螺旋密封spiral seal螺纹thread (of a screw)螺旋副helical pair螺旋机构screw mechanism基本额定寿命basic rating life基于实例设计case-based design,CBD 基圆base circle基圆半径radius of base circle基圆齿距base pitch基圆压力角pressure angle of base circle 基圆柱base cylinder基圆锥base cone急回机构quick-return mechanism急回特性quick-return characteristics急回系数advance-to return-time ratio 急回运动quick-return motion棘轮ratchet棘轮机构ratchet mechanism棘爪pawl极限位置extreme (or limiting) position极位夹角crank angle between extreme (or limiting) positions 计算机辅助设计computer aided design, CAD计算机辅助制造computer aided manufacturing, CAM计算机集成制造系统computer integrated manufacturing system, CIMS计算力矩factored moment; calculation moment 计算弯矩calculated bending moment加权系数weighting efficient加速度acceleration加速度分析acceleration analysis加速度曲线acceleration diagram尖点pointing; cusp尖底从动件knife-edge follower间隙backlash间歇运动机构intermittent motion mechanism减速比reduction ratio减速齿轮、减速装置reduction gear减速器speed reducer减摩性anti-friction quality渐开螺旋面involute helicoid渐开线involute渐开线齿廓involute profile渐开线齿轮involute gear渐开线发生线generating line of involute渐开线方程involute equation渐开线函数involute function渐开线蜗杆involute worm渐开线压力角pressure angle of involute渐开线花键involute spline简谐运动simple harmonic motion键key键槽keyway交变应力repeated stress交变载荷repeated fluctuating load交叉带传动cross-belt drive交错轴斜齿轮crossed helical gears胶合scoring角加速度angular acceleration角速度angular velocity角速比angular velocity ratio角接触球轴承angular contact ball bearing 角接触推力轴承angular contact thrust bearing角接触向心轴承angular contact radial bearing角接触轴承angular contact bearing铰链、枢纽hinge校正平面correcting plane接触应力contact stress接触式密封contact seal阶梯轴multi-diameter shaft结构structure结构设计structural design截面section节点pitch point节距circular pitch; pitch of teeth节线pitch line节圆pitch circle节圆齿厚thickness on pitch circle节圆直径pitch diameter节圆锥pitch cone节圆锥角pitch cone angle解析设计analytical design紧边tight-side紧固件fastener径节diametral pitch径向radial direction径向当量动载荷dynamic equivalent radial load径向当量静载荷static equivalent radial load 径向基本额定动载荷basic dynamic radial load rating径向基本额定静载荷basic static radial load tating径向接触轴承radial contact bearing径向平面radial plane径向游隙radial internal clearance径向载荷radial load径向载荷系数radial load factor径向间隙clearance静力static force静平衡static balance静载荷static load静密封static seal局部自由度passive degree of freedom矩阵matrix矩形螺纹square threaded form锯齿形螺纹buttress thread form矩形牙嵌式离合器square-jaw positive-contact clutch绝对尺寸系数absolute dimensional factor绝对运动absolute motion绝对速度absolute velocity 均衡装置load balancing mechanism抗压强度compression strength开口传动open-belt drive开式链open kinematic chain开链机构open chain mechanism高度系列height series功work工况系数application factor工艺设计technological design工作循环图working cycle diagram工作机构operation mechanism工作载荷external loads工作空间working space工作应力working stress工作阻力effective resistance工作阻力矩effective resistance moment公法线common normal line公共约束general constraint公制齿轮metric gears功率power功能分析设计function analyses design共轭齿廓conjugate profiles共轭凸轮conjugate cam构件link鼓风机blower固定构件fixed link; frame固体润滑剂solid lubricant关节型操作器jointed manipulator惯性力inertia force惯性力矩moment of inertia ,shaking moment 惯性力平衡balance of shaking force惯性力完全平衡full balance of shaking force惯性力部分平衡partial balance of shaking force惯性主矩resultant moment of inertia惯性主失resultant vector of inertia冠轮crown gear广义机构generation mechanism广义坐标generalized coordinate轨迹生成path generation轨迹发生器path generator滚刀hob滚道raceway滚动体rolling element滚动轴承rolling bearing滚动轴承代号rolling bearing identification code滚针needle roller滚针轴承needle roller bearing滚子roller滚子轴承roller bearing滚子半径radius of roller滚子从动件roller follower滚子链roller chain滚子链联轴器double roller chain coupling 滚珠丝杆ball screw 滚柱式单向超越离合器roller clutch过度切割undercutting函数发生器function generator函数生成function generation含油轴承oil bearing耗油量oil consumption耗油量系数oil consumption factor赫兹公式H. Hertz equation合成弯矩resultant bending moment合力resultant force合力矩resultant moment of force黑箱black box横坐标abscissa互换性齿轮interchangeable gears花键spline滑键、导键feather key滑动轴承sliding bearing滑动率sliding ratio滑块slider环面蜗杆toroid helicoids worm环形弹簧annular spring缓冲装置shocks; shock-absorber灰铸铁grey cast iron回程return回转体平衡balance of rotors混合轮系compound gear train积分integrate机电一体化系统设计mechanical-electrical integration system design机构mechanism 机构分析analysis of mechanism机构平衡balance of mechanism机构学mechanism机构运动设计kinematic design of mechanism机构运动简图kinematic sketch of mechanism机构综合synthesis of mechanism机构组成constitution of mechanism机架frame, fixed link机架变换kinematic inversion机器machine机器人robot机器人操作器manipulator机器人学robotics技术过程technique process技术经济评价technical and economic evaluation技术系统technique system机械machinery机械创新设计mechanical creation design, MCD机械系统设计mechanical system design, MSD机械动力分析dynamic analysis of machinery机械动力设计dynamic design of machinery 机械动力学dynamics of machinery机械的现代设计modern machine design机械系统mechanical system机械利益mechanical advantage机械平衡balance of machinery机械手manipulator机械设计machine design; mechanical design 机械特性mechanical behavior机械调速mechanical speed governors机械效率mechanical efficiency机械原理theory of machines and mechanisms机械运转不均匀系数coefficient of speed fluctuation机械无级变速mechanical stepless speed changes基础机构fundamental mechanism端面transverse plane端面参数transverse parameters端面齿距transverse circular pitch端面齿廓transverse tooth profile端面重合度transverse contact ratio端面模数transverse module端面压力角transverse pressure angle锻造forge对称循环应力symmetry circulating stress对心滚子从动件radial (or in-line ) roller follower对心直动从动件radial (or in-line ) translating follower对心移动从动件radial reciprocating follower对心曲柄滑块机构in-line slider-crank (or crank-slider) mechanism多列轴承multi-row bearing多楔带poly V-belt多项式运动规律polynomial motion多质量转子rotor with several masses惰轮idle gear额定寿命rating life额定载荷load ratingII 级杆组dyad发生线generating line发生面generating plane法面normal plane法面参数normal parameters法面齿距normal circular pitch法面模数normal module法面压力角normal pressure angle法向齿距normal pitch法向齿廓normal tooth profile法向直廓蜗杆straight sided normal worm法向力normal force反馈式组合feedback combining反向运动学inverse ( or backward) kinematics反转法kinematic inversion反正切Arctan范成法generating cutting仿形法form cutting方案设计、概念设计concept design, CD 防振装置shockproof device飞轮flywheel飞轮矩moment of flywheel非标准齿轮nonstandard gear非接触式密封non-contact seal非周期性速度波动aperiodic speed fluctuation非圆齿轮non-circular gear粉末合金powder metallurgy分度线reference line; standard pitch line分度圆reference circle; standard (cutting) pitch circle分度圆柱导程角lead angle at reference cylinder分度圆柱螺旋角helix angle at reference cylinder分母denominator分子numerator分度圆锥reference cone; standard pitch cone 分析法analytical method封闭差动轮系planetary differential复合铰链compound hinge复合式组合compound combining复合轮系compound (or combined) gear train 复合平带compound flat belt复合应力combined stress复式螺旋机构Compound screw mechanism 复杂机构complex mechanism杆组Assur group干涉interference刚度系数stiffness coefficient刚轮rigid circular spline钢丝软轴wire soft shaft刚体导引机构body guidance mechanism刚性冲击rigid impulse (shock)刚性转子rigid rotor刚性轴承rigid bearing刚性联轴器rigid coupling高度系列height series高速带high speed belt高副higher pair格拉晓夫定理Grashoff`s law根切undercutting公称直径nominal diameter阿基米德蜗杆Archimedes worm安全系数safety factor; factor of safety安全载荷safe load凹面、凹度concavity扳手wrench板簧flat leaf spring半圆键woodruff key变形deformation摆杆oscillating bar摆动从动件oscillating follower摆动从动件凸轮机构cam with oscillating follower 摆动导杆机构oscillating guide-bar mechanism 摆线齿轮cycloidal gear摆线齿形cycloidal tooth profile摆线运动规律cycloidal motion摆线针轮cycloidal-pin wheel包角angle of contact保持架cage背对背安装back-to-back arrangement背锥back cone ;normal cone背锥角back angle背锥距back cone distance比例尺scale比热容specific heat capacity闭式链closed kinematic chain闭链机构closed chain mechanism臂部arm变频器frequency converters变频调速frequency control of motor speed 变速speed change变速齿轮change gear ; change wheel变位齿轮modified gear变位系数modification coefficient标准齿轮standard gear标准直齿轮standard spur gear表面质量系数superficial mass factor表面传热系数surface coefficient of heat transfer表面粗糙度surface roughness并联式组合combination in parallel并联机构parallel mechanism并联组合机构parallel combined mechanism 并行工程concurrent engineering并行设计concurred design, CD不平衡相位phase angle of unbalance不平衡imbalance (or unbalance)不平衡量amount of unbalance不完全齿轮机构intermittent gearing波发生器wave generator波数number of waves补偿compensation参数化设计parameterization design, PD残余应力residual stress操纵及控制装置operation control device槽轮Geneva wheel槽轮机构Geneva mechanism ;Maltese cross槽数Geneva numerate槽凸轮groove cam侧隙backlash差动轮系differential gear train差动螺旋机构differential screw mechanism 差速器differential 常用机构conventional mechanism; mechanism in common use车床lathe承载量系数bearing capacity factor承载能力bearing capacity成对安装paired mounting尺寸系列dimension series齿槽tooth space齿槽宽spacewidth齿侧间隙backlash齿顶高addendum齿顶圆addendum circle齿根高dedendum齿根圆dedendum circle齿厚tooth thickness齿距circular pitch齿宽face width齿廓tooth profile齿廓曲线tooth curve齿轮gear齿轮变速箱speed-changing gear boxes齿轮齿条机构pinion and rack齿轮插刀pinion cutter; pinion-shaped shaper cutter齿轮滚刀hob ,hobbing cutter齿轮机构gear齿轮轮坯blank齿轮传动系pinion unit齿轮联轴器gear coupling齿条传动rack gear齿数tooth number齿数比gear ratio齿条rack齿条插刀rack cutter; rack-shaped shaper cutter 齿形链、无声链silent chain齿形系数form factor齿式棘轮机构tooth ratchet mechanism插齿机gear shaper重合点coincident points重合度contact ratio冲床punch传动比transmission ratio, speed ratio传动装置gearing; transmission gear传动系统driven system传动角transmission angle传动轴transmission shaft串联式组合combination in series串联式组合机构series combined mechanism串级调速cascade speed control创新innovation ; creation创新设计creation design垂直载荷、法向载荷normal load唇形橡胶密封lip rubber seal磁流体轴承magnetic fluid bearing从动带轮driven pulley从动件driven link, follower从动件平底宽度width of flat-face从动件停歇follower dwell从动件运动规律follower motion从动轮driven gear粗线bold line粗牙螺纹coarse thread大齿轮gear wheel打包机packer打滑slipping 带传动belt driving带轮belt pulley带式制动器band brake单列轴承single row bearing单向推力轴承single-direction thrust bearing 单万向联轴节single universal joint单位矢量unit vector当量齿轮equivalent spur gear; virtual gear 当量齿数equivalent teeth number; virtual number of teeth当量摩擦系数equivalent coefficient of friction当量载荷equivalent load刀具cutter导数derivative倒角chamfer导热性conduction of heat导程lead导程角lead angle等加等减速运动规律parabolic motion; constant acceleration and deceleration motion 等速运动规律uniform motion; constant velocity motion等径凸轮conjugate yoke radial cam等宽凸轮constant-breadth cam等效构件equivalent link等效力equivalent force等效力矩equivalent moment of force等效量equivalent等效质量equivalent mass等效转动惯量equivalent moment of inertia 等效动力学模型dynamically equivalent model底座chassis低副lower pair点划线chain dotted line(疲劳)点蚀pitting垫圈gasket垫片密封gasket seal碟形弹簧belleville spring顶隙bottom clearance定轴轮系ordinary gear train; gear train with fixed axes动力学dynamics动密封kinematical seal动能dynamic energy动力粘度dynamic viscosity动力润滑dynamic lubrication动平衡dynamic balance动平衡机dynamic balancing machine 动态特性dynamic characteristics动态分析设计dynamic analysis design 动压力dynamic reaction动载荷dynamic load。
RV及Harmonic Drive减速机

珠海运泰利自动化
7
珠海运泰利自动化 5
2.2 我国机器人基础部件技术及产业的建议
从研发,到加工制造,再到产业化应用整个过程中,联合国内各家优势单位,以RV减 速机为例,以重庆大学机械传动国家重点实验室等高校院所为研究基础,以浙江恒 丰泰,秦川机床厂等一批有实力的减速机生产厂商加工和产业化主体,以奇瑞,广 州数控,苏州博实等机器人制造商的客观需求为拉动力,加速整个高精度机器人减 速机的产业化发展。 建立工业机器人关键部件检测中心,按照国家标准,对各类关键部件实施全面的性 能检测和产品认证。这对于成熟产品形成的不断完善,确保产品质量十分必要。 实行财政补贴:在工业机器人及相关基础部件产业化的初期,为了支持国产机器人 的发展,对规模化生产的企业,可按其实际销售的相关人产品,参照国际市场的平 均价格,给予一定比例(如20一40%)的补贴。 对采用国产机器人的应用工程给予一定时期(3一5年)的减免税优惠,或对典型的应 用 工程系统,经申请、核准予以经费支持,以扶持整个产业的发展。
4
2.1 国内外发展趋势
在机器人高精度谐波减速机方面, 在其齿轮传动中采用双圆弧 齿廓,可以有效改善柔轮齿根的应力状况和传动啮合质量,提高承 载能力、扭转刚度和柔轮疲劳寿命,并可降低最小传动比。日本的 IH齿形是基于余弦凸轮波发生器开发的双圆弧齿形,由于采用近似 方法设计,应用初期出现了齿廓干涉等问题,但是到1990年代初期 已经基本完善。目前,日本谐波传动系统有限公司的谐波产品有十 几个类型,二十多个系列,最小传动比为30,型号中带有字母 “S”的,其齿形为双圆弧齿形,产品垄断了主要国际市场。其中 超短杯型号CSD和SHD,其柔轮长度仅有常规谐波传动柔轮的1/3, 既增加传动刚度,又大幅度减轻了谐波减速器重量。此外,在谐波 传动轻量化技术方面,采用铝等轻合金材料制造波发生器与减速器 壳体等方式,减薄刚轮外缘以及改进连接结构等形式,使整机重量 大幅度减轻。 相比于谐波减速机,RV减速机具有更高的高度和回 转精度,目前其发展方向是如何通过对内部轴承的配置,材料和热 处理工艺的改进,增加减速机的扭转刚度,最大抗弯弯矩,以及提 高在频繁加减速等恶劣工况下的使用寿命。
三相全波线性驱动电机驱动IC(LB11685AV)说明书

LB11685AVMonolithic Digital IC3‐phase Sensor Less Motor DriverOverviewThe LB11685A V is a three-phase full-wave current-linear-drive motor driver IC. It adopts a sensor less control system without the use of a Hall Effect device. For quieter operation, the LB11685A V features a current soft switching circuit and be optimal for driving the cooling fan motors used in refrigerators, etc.Functions•Three-phase Full-wave Linear Drive (Hall Sensor-less Method)•Built-in Current Limiter Circuit•Built-in Three-phase Output V oltage Control Circuit•Built-in Motor Lock Protection Circuit•Motor Lock Protection Detection Output•FG Output Made by Back EMF•Built-in Thermal Shut Down Circuit•Beat Lock Prevention CircuitSpecificationsMAXIMUM RATINGS (T A = 25°C)Parameter Symbol Conditions Ratings Unit Maximum SupplyVoltageV CC max19V Input AppliedVoltageV IN max−0.3 to V CC + 0.3VMaximum Output Current I O max(Note1)1.2AAllowable Power Dissipation P d max Mounted ona board (Note2)1.05WOperatingTemperatureT opr−40 to +85°CStorageTemperatureT stg−55 to +150°CJunctionTemperatureT j max150°CStresses exceeding those listed in the Maximum Ratings table may damage the device. If any of these limits are exceeded, device functionality should not be assumed, damage may occur and reliability may be affected.1.The I O is a peak value of motor-current.2.Specified board: 76.1mm × 114.3mm × 1.6mm, glass epoxy board. CAUTION:Absolute maximum ratings represent the value which cannot be exceeded for any length of time.CAUTION:Even when the device is used within the range of absolutemaximum ratings, as a result of continuous usage under hightemperature, high current, high voltage, or drastic temperaturechange, the reliability of the IC may be degraded. Pleasecontact us for the further details.SSOP24JCASE 565ASSee detailed ordering and shipping information on page7 of this data sheet.ORDERING INFORMATIONXXXXX = Specific Device CodeY = YearM = MonthDDD = Additional Traceability DataXXXXXXXXXXYMDDDMARKING DIAGRAMPIN ASSIGNMENT24VOUT UOUT123WOUT (NC)222(NC) (NC)321(NC) PGND420RF MCOM519V CC (NC)618REG SGND717VOH FG816FC1RD915FC2 (NC)1014C2 V CO1113C1CX12RECOMMENDED OPERATING CONDITIONS (T A = 25°C)Symbol Parameter Conditions Ratings Unit V CC Recommended Supply Voltage12.0V V CC op Operating Supply Voltage 4.5 to 18.0V Functional operation above the stresses listed in the Recommended Operating Ranges is not implied. Extended exposure to stresses beyond the Recommended Operating Ranges limits may affect device reliability.ELECTRICAL CHARACTERISTICS (T C = 25°C unless otherwise noted)Symbol Parameter Conditions Min Typ Max UnitI CC Supply Current FC1 = FC2 = 0V51020mAVREG Internal Regulate Voltage 3.0 3.3 3.6V VOSOUR Output Voltage (Source)I O = 0.8A (Note5) 1.3 1.7V VOSINK Output Voltage (Sink)I O = 0.8A (Note5)0.5 1.3V VOLIM Current Limiter0.2680.3000.332V VINCOM MCOM PinCommon-input Voltage Range0V CC − 2VICOM+MCOM PinSource Current for HysteresisMCOM = 7V3080m AICOM−MCOM PinSink Current for HysteresisMCOM = 7V3080m ARTCOM MCOM PinHysteresis Current RatioRTCOM = ICOM+ / ICOM−0.6 1.4I VCO VCO Input Bias Current V CO = 2.3V0.2m Af VCO min VCO Oscillation Minimum Frequency V CO = 2.1V, CX = 0.015m FDesign target (Note4)930Hzf VCO max VCO Oscillation Maximum Frequency V CO = 2.7V, CX = 0.015m FDesign target (Note4)8.6kHzI CX CX Charge/Discharge Current V CO = 2.5V, CX = 1.6V70100140m AD VCX CX Hysteresis Voltage0.350.550.75IC1(2)+C1 (C2) Charge Current V CO = 2.5V, C1(2) = 1.3V122028m A IC1(2)−C1 (C2) Discharge Current V CO = 2.5V, C1(2) = 1.3V122028m A RTC1(2)C1 (C2) Charge/Discharge Current Ratio RTC1(2) = IC1(2)+ / IC1(2)−0.8 1.0 1.2RTCCHG C1/C2 Charge Current Ratio RTCCHG = IC1+ / IC2+0.8 1.0 1.2RTCDIS C1/C2 Discharge Current Ratio RTCDIS = IC1− / IC2−0.8 1.0 1.2VCW1(2)C1 (C2) Cramp Voltage Width 1.0 1.3 1.6V VFGL FG Output Low Level Voltage IFG = 3mA0.5V VRDL RD Output Low Level Voltage IRD = 3mA0.5VTTSD Thermal Shut Down Operating Temperature (Note3)Junction temperatureDesign target (Note4)150180°CD TTSD Thermal Shut Down Hysteresis Temperature(Note3)Junction temperatureDesign target (Note4)15°CProduct parametric performance is indicated in the Electrical Characteristics for the listed test conditions, unless otherwise noted. Product performance may not be indicated by the Electrical Characteristics if operated under different conditions.3.The thermal shut down circuit is built-in for protection from damage of IC. But its operation is out of T opr. Design thermal calculation at normaloperation.4.Design target value and no measurement is made.5.The I O is a peak value of motor-current.Figure 1. P d max − T A00.51.01.5−40−20020406080100Ambient Temperature, T A (5C)A l l o w a b l e P o w e r D i s s i p a t i o n ,P d m a x (W )BLOCK DIAGRAMFigure 2. Block DiagramPIN FUNCTION PIN FUNCTIONPIN FUNCTION (continued)APPLICATION CIRCUIT EXAMPLE * Each fixed number in the following Figure3, is the referential value.Figure 3. Application Circuit Example 1 m F V CCORDERING INFORMATIONDevice Package Wire Bond Shipping† (Qty / Packing) LB11685AV−TLM−H SSOP24J (275mil)(Pb-Free / Halogen Free)Au-wire2000 / Tape & ReelLB11685AV−W−AH SSOP24J (275mil)(Pb-Free / Halogen Free)Cu-wire2000 / Tape & Reel†For information on tape and reel specifications, including part orientation and tape sizes, please refer to our Tape and Reel Packaging Specifications Brochure, BRD8011/D.DATE 31 OCT 2013NOTE:The measurements are not to guarantee but for reference only.*For additional information on our Pb −Free strategy and soldering details, please download the ON Semiconductor Soldering and Mounting Techniques Reference Manual, SOLDERRM/D.XXXXX = Specific Device Code Y = Year M = MonthDDD = Additional Traceability Data GENERICMARKING DIAGRAM**This information is generic. Please refer to device data sheet for actual part marking.Pb −Free indicator, “G” or microdot “ G ”,may or may not be present.XXXXXXXXXX YMDDDMECHANICAL CASE OUTLINEPACKAGE DIMENSIONSON Semiconductor and are trademarks of Semiconductor Components Industries, LLC dba ON Semiconductor or its subsidiaries in the United States and/or other countries.ON Semiconductor reserves the right to make changes without further notice to any products herein. ON Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does ON Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages. ON Semiconductor does not convey any license under its patent rights nor theON Semiconductor and are trademarks of Semiconductor Components Industries, LLC dba ON Semiconductor or its subsidiaries in the United States and/or other countries.ON Semiconductor owns the rights to a number of patents, trademarks, copyrights, trade secrets, and other intellectual property. A listing of ON Semiconductor’s product/patent coverage may be accessed at ON Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does ON Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages.PUBLICATION ORDERING INFORMATIONTECHNICAL SUPPORTNorth American Technical Support:Voice Mail: 1 800−282−9855 Toll Free USA/Canada Phone: 011 421 33 790 2910LITERATURE FULFILLMENT :Email Requests to:*******************ON Semiconductor Website: Europe, Middle East and Africa Technical Support:Phone: 00421 33 790 2910For additional information, please contact your local Sales RepresentativeMouser ElectronicsAuthorized DistributorClick to View Pricing, Inventory, Delivery & Lifecycle Information:O N Semiconductor:LB11685AV-TLM-H LB11685AV-MPB-H LB11685AV-W-AH。
Invertek Drives Optidrive E3 变速器说明书

/optidrive-e3Offa’s Dyke Business ParkWelshpool, Powys, UKSY21 8JFTel: +44 (0)1938 556868Fax: +44 (0)1938 556869Email:************************INVERTEK DRIVES LIMITED UK HeadquartersGeneral Purpose DriveEasy control for all motor typesAbout Invertek DrivesSales, service & application support in over 80 countriesWorld-class production, innovation & training facilities at UK headquartersGlobal assembly cells controlled by cloud-based manufacturing databaseISO 14001 environmental &ISO 9001 quality management systemsAC Variable Speed DriveOptidrive E3L ow Power ApplicationsDedicated to low power applications, Optidrive E3 combines innovative technology, reliability, robustness and ease of use in a range of compact IP20 & IP66 enclosures.S imple Commissioning14 parameter basic setup. Default settings suitable for most applications. Contactor style connection for simple wiring.O ptidrive E3 IP66Environmentally protected, IP66 rated models can be mounted directly on your processing equipment.W ashdown ReadyWith a sealed ABS enclosure and corrosion resistant heatsink, Optidrive E3 IP66 models are ideal for high-pressure washdown applications.O n-drive ControlIP66 models feature optional, convenient controls for speed control, REV/OFF/FWD and Power ON/OFF, complete with safety lock.S ingle Phase Motor ControlOptidrive E3 for Single Phase Motors provides accurate speed control of single phase PSC or shaded pole motors. Specialboost phase ensures reliable starting, initially ramping the motor voltage up to rated voltage whilst maintaining a fixed starting frequency, before reducing the frequency and voltage to the desired operating point.+44 (0)1938 5568680.37kW – 37kW / 0.5HP – 50HP 110 – 480V Single & 3 Phase InputEasy to UseIP66IP20© 2019 I n v e r t e k D r i v e s L t d . A l l r i g h t s r e s e r v e d . 85-O D E 3B -I N V 2.16For worldwide locations, please visit /worldwide Contact your local representative at /representative Tel: 1-800-SM-CYCLO (762-9256)Operates up to 50°CCompact, robust and reliable general purpose drive for panel mountingSimply Power UpOptidrive E3 provides precise motor control and energy savings using the factorysettings. Simply power up and the drive can immediately deliver energy savings.14 basic parameters allow simple adjustment for your application if required, with up to 50 parameters available in total for a highly flexible performance.IP20Up to 37kWSimple InstallationDIN rail and keyhole mounting optionsQuick ReferenceIntegrated help cardOptistick SmartRapid commissioning toolSee Page 10Fast Connection5mm rising clamp terminalswith captive screws5 sizes cover global supply ratingsIncredibly Easy to UseBuilt in PI control, EMC filter (C1) & brake chopper Application macros for industrial, fan and pump operationconnectivityDual analogue inputsRTUon-board as standardControls Multiple Motor TypesIE2, 3 & 4IM, PM, BLDC and SynRMMotor supply connects at baseDust-Tight DesignInstall directly on your processing equipment and be sure of protection from dust and contaminants.Washdown ReadyWith a sealed ABS enclosure and corrosion resistant heatsink, the Optidrive E3 IP66 is ideal forhigh-pressure washdown applications.Switched modelsSimply wire up the drive, turn the inbuilt potentiometer and the motor will start running – allowing immediate energy savings.Saving energy cannot be easier than this!IP66/Nema 4X outdoor ratedBuilt with tough polycarbonate plastics specifically chosen to withstand degredation by ultra violet (UV), greases, oils and acids. Also robust enough not to be brittle at -20o C.For ultimate ease of useLockable Mains Disconnect / IsolatorLocal Speed Potentiometer Run Reverse / Off / Run Forward SwitchOutdoor rated enclosed drives for direct machine mounting, dust tight and ready for washdown dutyIP66 OutdoorUp to 22kWCoated Heatsink as StandardIdeal for hygiene based operations requiring washdown — such as food and beveragePower supply connects at top123Locally customisableFlat front to terminal cover with mounting points for switches and an internal PCB.2 x RJ45 portseliminate the need for a splitter.Easily accessible EMC disconnect Easy to wiredue to the large, accessible chamber and removeable gland plate.123Switched or non-switchedConformal coating as standardInput RatingsSupply Voltage 110 – 115V ± 10% 200 – 240V ± 10% 380 – 480V ± 10%SupplyFrequency48 – 62HzDisplacementPower Factor> 0.98PhaseImbalance3% Maximum allowedInrush Current< rated currentPower Cycles120 per hour maximum, evenly spacedOutput RatingsOutput Power 110V 1 Ph Input: 0.5–1.5HP (230V 3 Ph Output) 230V 1 Ph Input: 0.37–4kW (0.5–5HP)230V 3 Ph Input: 0.37–11kW (0.5–15HP)400V 3 Ph Input: 0.75–22kW460V 3 Ph Input: 1–30HPOverload Capacity 150% for 60 Seconds 175% for 2.5 secondsOutputFrequency0 – 500Hz, 0.1Hz resolution AccelerationTime0.01 – 600 seconds DecelerationTime0.01 – 600 secondsTypicalEfficiency> 98%Ambient Conditions Temperature Storage: −40 to 60°COperating: −20 to 50°CAltitudeUp to 1000m ASL without deratingUp to 2000m maximum UL approvedUp to 4000m maximum (non UL) Humidity95% Max, non condensing Vibration Conforms to EN61800-5-1Enclosure IngressProtection IP20, IP66Programming Keypad Built-in keypad as standardOptional remote mountable keypadDisplay7 Segment LEDPC OptiTools StudioControlSpecification ControlMethodSensorless Vector Speed ControlPM Vector ControlBLDC ControlSynchronous ReluctancePWMFrequency 4 – 32kHz EffectiveStoppingModeRamp to stop: User Adjustable 0.1 – 600 secsCoast to stopBraking Motor Flux BrakingBuilt-in braking transistor (not frame size 1)Skip Frequency Single point, user adjustableSetpointControlAnalogSignal0 to 10 Volts10 to 0 Volts0 to 20mA20 to 0mA4 to 20mA20 to 4mADigitalMotorised Potentiometer (Keypad)Modbus RTUCANopenEtherNet/IPFieldbusBuilt-inCANopen125–1000 kbpsModbusRTU9.6–115.2 kbps selectableI/O Specification Power Supply24 Volt DC, 100mA, Short Circuit Protected10 Volt DC, 10mA for PotentiometerProgrammableInputs4 Total2 Digital2 Analog / Digital selectableDigital Inputs8 – 30 Volt DC, internal or external supplyResponse time < 4msAnalog InputsResolution: 12 bitsResponse time: < 4msAccuracy: ± 2% full scaleParameter adjustable scaling and offsetProgrammableOutputs2 Total1 Analog / Digital1 RelayRelay Outputs Maximum Voltage: 250 VAC, 30 VDCSwitching Current Capacity: 6A AC, 5A DCAnalogOutputs0 to 10 VoltApplicationFeaturesPI Control Internal PI ControllerStandby / Sleep FunctionFire ModeBidirectionalSelectable Speed Setpoint (Fixed / PI / Analog/ Fieldbus)Maintenance &DiagnosticsFault Memory Last 4 Trips stored with time stampData LoggingLogging of data prior to trip for diagnosticpurposes:Output CurrentDrive TemperatureDC Bus VoltageMonitoring Hours Run MeterStandardsComplianceLow VoltageDirectiveAdjustable speed electrical power drive systems.EMC requirementsEMC Directive2014/30/EUCat C1 according to EN61800-3:2004MachineryDirective2006/42/ECConformance CE, UL, RCMDrive Specification2 221 110 150kW HP Amps Frame110 – 115V ± 10% 1 Phase Input 0.370.5 2.31ODE-3-110023-101#0.751 4.31ODE-3-110043-101#1.1 1.5 5.82ODE-3-210058-104#200 – 240V ± 10% 1 Phase Input 0.370.5 2.31ODE-3-120023-1#1#0.751 4.31ODE-3-120043-1#1#1.5271ODE-3-120070-1#1#1.5272ODE-3-220070-1#4#2.2310.52ODE-3-220105-1#4# 4515.33ODE-3-320153-104#200 – 240V ± 10% 3 Phase Input 0.370.5 2.31ODE-3-120023-301#0.751 4.31ODE-3-120043-301#1.5271ODE-3-120070-301#1.5272ODE-3-220070-3#4#2.2310.52ODE-3-220105-3#4# 45183ODE-3-320180-3#4# 5.57.5243ODE-3-320240-3#4# 7.510304ODE-3-420300-3#4# 1115464ODE-3-420460-3#4# 1520615ODE-3-520610-3F42 18.525725ODE-3-520720-3F42380 – 480V ± 10% 3 Phase Input 0.751 2.21ODE-3-140022-3#1#1.52 4.11ODE-3-140041-3#1#1.52 4.12ODE-3-240041-3#4#2.23 5.82ODE-3-240058-3#4#459.52ODE-3-240095-3#4#5.57.5143ODE-3-340140-3#4#7.510183ODE-3-340180-3#4#1115243ODE-3-340240-3#4#1520304ODE-3-440300-3#4#18.525394ODE-3-440390-3#4#2230464ODE-3-440460-3#4#3040615ODE-3-540610-3F423750725ODE-3-540720-3F42ProductFaModelCodeGenerationVoltageCoFrameSizeOutputCuSupplyPhaEnclosureBrakeTranEMCFilterEnclosure TypesEMC FilterAFB2Replace #colour-coded optionkW HP Amps Size110 – 115V ± 10%1 Phase Input0.370.571ODE -3-110070-1#1#-010.550.7510.52ODE -3-210105-1#4#-01200 – 240V ± 10%1 Phase Input0.370.5 4.31ODE -3-120043-1#1#-010.75171ODE -3-120070-1#1#-011.11.510.52ODE -3-220105-1#4#-01P r od uc tF a M od el C od eG en er a ti o nV o l t a g e C o F r a m e S i z e C a p a c i t y S u p p l y P h a E n c l o s u r e T S i n g l e P h a s B r a k e T r a n s E M C F i l t e r Enclosure TypesAB2Replace #colour-coded optionODE -3-120043-3F 12-01Product Family GenerationFrame Size Capacity 110–115V = 1Voltage Code 200–240V = 2380–480V = 4Model Code Guide:Drive SpecificationInput RatingsSupply Voltage 110 – 115V ± 10%200 – 240V ± 10%Supply Frequency 48 – 62Hz Displacement Power Factor > 0.98Phase Imbalance 3% Maximum allowed Inrush Current < rated currentPower Cycles120 per hour maximum, evenly spaced Output RatingsOutput Power 110V 1 Ph Input: 0.5–0.75HP230V 1 Ph Input: 0.37–1.1kW (0.5–1.5HP)Overload Capacity 150% for 60 Seconds 175% for 2.5 seconds Output Frequency 0 – 500Hz, 0.1Hz resolution Acceleration Time 0.01 – 600 secondsDeceleration Time 0.01 – 600 seconds Typical Efficiency> 98%Ambient ConditionsTemperatureStorage: −40 to 60°C Operating: −20 to 50°CAltitude Up to 1000m ASL without derating Up to 2000m maximum UL approved Up to 4000m maximum (non UL)Humidity 95% Max, non condensing VibrationConforms to EN61800-5-1EnclosureIngress Protection IP20, IP66ProgrammingKeypad Built-in keypad as standardOptional remote mountable keypad Display 7 Segment LED PCOptiTools StudioControl SpecificationControl Method V/F VoltageEnergy Optimsied V/F PWM Frequency 4 – 32kHz EffectiveStopping Mode Ramp to stop: User Adjustable 0.1 – 600 secs Coast to stopBraking Motor Flux BrakingBuilt-in braking transistor (frame size 2)Skip FrequencySingle point, user adjustableSetpoint ControlAnalog Signal0 to 10 Volts 10 to 0 Volts 0 to 20mA 20 to 0mA 4 to 20mA 20 to 4mADigital Motorised Potentiometer (Keypad)Modbus RTU CANopen EtherNet/IPFieldbusBuilt-inCANopen 125–1000 kbpsModbus RTU9.6–115.2 kbps selectableI/O SpecificationPower Supply 24 Volt DC, 100mA, Short Circuit Protected 10 Volt DC, 10mA for Potentiometer Programmable Inputs 4 Total 2 Digital2 Analog / Digital selectableDigital Inputs 8 – 30 Volt DC, internal or external supply Response time < 4msAnalog Inputs Resolution: 12 bits Response time: < 4ms Accuracy: ± 2% full scaleParameter adjustable scaling and offset Programmable Outputs 2 Total1 Analog / Digital 1 RelayRelay Outputs Maximum Voltage: 250 VAC, 30 VDCSwitching Current Capacity: 6A AC, 5A DC Analog Outputs 0 to 10 VoltApplication FeaturesPI Control Internal PI Controller Standby / Sleep FunctionFire Mode Selectable Speed Setpoint (Fixed / PI / Analog / Fieldbus)Maintenance & Diagnostics Fault MemoryLast 4 Trips stored with time stamp Data LoggingLogging of data prior to trip for diagnostic purposes:Output Current Drive Temperature DC Bus Voltage MonitoringHours Run MeterStandards ComplianceLow Voltage Directive Adjustable speed electrical power drive systems.EMC requirementsEMC Directive 2014/30/EU230V 1Ph. Filtered Units : Cat C1 according to EN61800-3:2004Machinery Directive 2006/42/EC ConformanceCE, UL, RCMPallet handling in UK Olive oil decanting in Greece Seed processing in NetherlandsPizza making in Belgium Chamfering machines in Italy Machine tool OEM in UKChemical fume removal in Singapore Sawmill optimisation in UK Precision polishing inSwitzerlandOptions & AccessoriesProven Worldwide in Low Power ApplicationsExternal EMC Filters, Input Chokes & Output Filters are availableSee for detailsCompatible with:Windows Vista & Windows 7, Windows 8, Windows 8.1 & Windows 10Drive commissioning and parameter backup• Real-time parameter editing • Drive network communication• Parameter upload, download and storage • Simple PLC function programming • Real-time scope function and data logging •Real-time data monitoringOptistick SmartRemote KeypadsRJ45 AccessoriesEtherNet ModuleOptiport 2Remote Keypad & LED DisplayOptipad Remote Keypad & TFT DisplayOptistick SmartRapid Commissioning Tool • Allows copying, backup and restore of drive parameters•Provides Bluetooth interface to a PC running OptiTools Studio or the OptiTools Mobile app on a smartphone •Onboard NFC (Near FieldCommunication) for rapid data transferOPT-2-OPORT-INOPT-3-OPPAD-INOPT-3-STICK-INEtherNet Module• ODVA compliant EtherNet/IP Modbus Translator Device• Compatible with all drive platforms: P2, E3 & Eco• Integrated network switch: simplifying network architecture •Compatible with RSLogix and CoDeSys PLCsBusiness-critical climate control for commercial horticulturist Hatziminas Flowers, GreeceChilled water pumpcontrol predicted to save AED 12385 per yearAl Jahili Fort, UAEEfficient water circulation gives energy savings of 60% per annum Leisure World, AustraliaChain wax development for Team Sky cycling team Muc-Off, UKCooling loop for solar energy research Solar Tech Lab, ItalyIdeal for simple and fast connection of Modbus RTU/CAN networksOPT-J4505-IN RJ45 Cable 0.5m OPT-J4510-IN RJ45 Cable 1.0m OPT-J4530-IN RJ45 Cable 3.0m OPT-J45SP-INRS485 3 Way Data Cable Splitter RJ45OPT-2-ETHEG-IN。
世界上最精密的减速器制造商——日本Nabtesco和HarmonicDrive
世界上最精密的减速器制造商——日本Nabtesco和HarmonicDrive减速器,大家可能都不太清楚是什么东西,说简单点,就是让转子的转动速度变慢的机器。
这种机器应用很广泛,例如汽车的变速箱、数码相机镜头、船舶推进螺旋桨、高精度加工机床等等,最近火起来的应用是工业机器人,其关节处需要大量使用到减速器。
今天咱们就来聊聊世界上最精密的减速器制造商——日本Nabtesco和HarmonicDrive。
变速箱目前主流的减速器分为RV(Rotate Vector旋转矢量)减速器和谐波齿轮减速器两种。
前者被日本ナブテスコ株式会社 - Nabtesco纳博特斯克垄断,后者被日本HarmonicDrive哈默纳科垄断,包括ABB、FANUC、KUKA等国际主流机器人厂商的减速器均由上述两家公司提供。
其中HarmonicDrive哈默纳科在工业机器人关节领域拥有15%的市场占有率,Nabtesco纳博特斯克拥有60%。
也就是说,目前全球机器人行业75%的精密减速机被日本垄断,剩余25%被德国、意大利、美国等瓜分。
Nabtesco纳博特斯克HarmonicDrive哈默纳科RV减速器由摆线针轮和行星支架组成,其体积小、抗冲击力强、扭矩大、定位精度高、振动小、减速比大,被广泛应用于工业机器人、机床、医疗检测设备、卫星接收系统等领域。
工业机器人RV减速器具有高得多的疲劳强度、刚度和寿命,而且回差精度稳定,包括我国在内的许多国家的机器人传动系统多采用RV减速器。
其可用于各种场景,可耐受高功率、长时间使用,一般将其放置在机座、大臂、肩部等重负载的位置。
RV减速器RV减速器谐波齿轮减速器是一种由固定的内齿刚轮、柔轮和使柔轮发生径向变形的谐波发生器组成。
这是一种新型传动结构,其利用柔性齿轮产生可控制的弹性变形波,引起刚轮与柔轮的齿间相对错齿来传递动力和运动。
谐波齿轮减速器谐波齿轮减速器谐波齿轮减速器这种传动与一般的齿轮传递具有本质上的差别,在啮合理论、集合计算和结构设计方面具有特殊性。
SIMOVERT MASTERDRIVES VC Compact PLUS 微型驱动器系列说明书

The proven MASTERDRIVES VC series with optimized power density.The Compact PLUS design is ideally suited for applications where space is at a premium.MASTERDRIVES VC Compact PLUS drives together with the 1PH7 or1LA5/1LA7 series motors form a perfectly harmonized drive system.SIMOVERTMASTERDRIVES VCCompact PLUSThe Compact PLUS design is the newestmember of the SIMOVERT MASTER-DRIVES VC (Vector Control) family andcompliments the spectrum in the lowerpower range. The SIMOVERT MASTER-DRIVES VC power spectrum now spansfrom 0.55 kW to 2300 kW. The CompactPLUS series covers the power rangefrom 0.55 kW to 18.5 kW. Larger powerratings are available in the form of com-pact, chassis and cabinet series units.3-ph. 380–480 V3-ph. 200–230 V3-ph. 380–480 V3-ph. 500–600 V3-ph. 200–230 V3-ph. 380–480 V3-ph. 500–600 V3-ph. 660–690 VSIMOVERT MASTERDRIVES VC is theoptimal drive solution for applicationswhich place high demands on reliabilityand control performance. MASTER-DRIVES VC Compact PLUS are the idealdrives for applications in the textile,packaging and printing industries as wellas in plastics processing and manufac-turing.2CHASSIS22–23kWCOMPACT2.2–37kW1-ph. 380–480 V3-ph. 500–600 V3-ph. 660–690 VCABINET45–15kWCOMPACTPL55185SIMOVERTMASTERDRIVES VC Compact PLUSMulti-motor drive systems may be im-plemented with minimal wiring require-ments using Compact PLUS inverters and rectifier units:The DC link connections are realised using tinned copper bus-bars to DIN 46 433(E-Cu 3 x 10) which are simply inserted into the terminals located on the upper side of the drives. Electrical contact is maintained via spring contacts avoiding the need for tightening screw terminals.The electronics of the rectifier and inver-ter units need only be supplied via an external 24 V auxiliary power supply and the multi-motor drive system is ready for operation.D U L ESystem components may be used to expand the Compact PLUS drive system – also at a later date.Energy may be stored for short periods of time using the capacitor module .The DC link module is used for making the connection between cop-per bus-bar and wired DC links, e.g.for connecting other SIMOVERT MASTERDRIVES series components such as AFE compact rectifier units to the DC link of the Compact PLUS series.Converters may be used for both single and multi-motor drive pact PLUS converters may also be used to supply additional inverters with power and are therefore ideally suited for smaller multi-motor drive systems.The converter is used to supply the in-verters with both power and 24 V DC.C A P A C I T O R M OD U L ED A 65-5964==M =M =M ...InverterRectifier unitBraking resistor Commutating reactorRFI filter=24 V DCPower supply 24 V DCX9X100X100X100X1003AC 380 - 480 V DA65-59673~3~3~~~~~~RFI filter Commutating reactor 3AC 380 - 480 V RFI filter Commutating reactor3AC 380 - 480 VSIMOVERT MASTERDRIVES VC Compact PLUSThe converter has an integrated braking chopper. Only an external braking resistor is required to dissipate the braking energy generated during generative operation. Within the compact PLUS series, addi-tional inverters may be connected to a converter unit via the DC link bus. The sum of the nominal power ratings of the connected inverters may equal the nominal power rating of the converter,e.g. a 5.5 kW converter may supply a4 kW inverter and additionally two0.75 kW inverters.A switched mode power supply is used to supply the converter control electro-nics from the DC link. The control elec-tronics may also be supplied externally using a 24 V DC power supply connected to terminals X9, e.g. in order to maintain communication with a higher level con-trol system when the power section is switched off (DC link is discharged). The switched mode power supply of a converter is also capable of supplying the control electronics of an additional two inverters with the necessary power. The control electronics of an inverter unit must always be supplied externally with 24 V DC power via the X100 termi-nals. The location of the X100 terminalsis always identical enabling the 24 V DC power supply to be wired easily.Unit OptionsSafe STOP (K80)With appropriate external components, unexpected starting of the drive toEN954-1 Safety Category 3 may beprevented. This option is available forall inverters and for converters from5.5 kW nominal power rating.Operation with non-earthedsupplies (L20)Converters without radio-interferencesuppression capacitors, enabling connec-tion to IT-supply networks.Notice:Rectifier units and inverters are suitable for connection to IT-supply networks as standard.The control electronics are alwaysearthed (PELV circuit).4U2V2W2P24P15DCM3~ X100X53312433334P24VM24DA65-5976ASICwithtrigger logicK1Safety relayVoltage adaptationControl electronics24 V DCSupplyOptionK80C o n v e r t e rI n v e r t e rw i t h“S a f e S T O P”O p t i o nU2V2W2M3~ X100123334P24VM24X9U1V1W1D C G HDA65-5975AVoltage adaptactionControl electronics24 V DCOutput24 V DCSupplySwitched-modepower supplyBraking resistor(external)SBP•Evaluation of an external encoder or frequency generator, e.g. setpoint signal•HTL or TTL level selectableNotice:All units have a HTL motor encoder input as standard.5MASTERDRIVES VC Compact PLUSCBP2•Communication via PROFIBUS-DP •The CBP2 board supports PROFIBUS Profile V3 (direct communication,acyclical communication with Master Class II)CBC•Communication via CAN Bus •The CBC board supports CAN levels 1 and 2SLB•Fast communication between the drives via the SIMOLINK bus(fiber-optic cable) with a maximum of 201 nodesCOMMUNICATION BOARDSOption Boards for the Available Option Board Slots (Slots A and B):EB1•4 bidirectional digital inputs/outputs •3 digital inputs •2 analog outputs •3 analog inputs EB2•3 relay outputs with make contacts •1 relay output with change-over contact •2 digital inputs •1 analog output •1 anlaog inputTERMINAL EXPANSION BOARDSPULSE ENCODER EVALUATIONThe units are available with the requiredoption boards factory fitted using the option codes. A maximum of 2 option boards may be installed.For a detailed description of the option boards, please refer to Catalog DA 65.10SIMOVERT MASTERDRIVES VC, Chap-ter 6.Option Option Board Code Board Slot A Slot B CBP2G91G92CBC G21G22SLB G41G42EB1G61G62EB2G71G72SBPC11C12S l o t AS l o t BMASTERDRIVES VC Compact PLUSThe control structure of the SIMOVERT MASTERDRIVES VC is initially set in the factory and maybe selected via parameter, e.g. V/f control, field oriented frequency control.Additionally, signals may be picked-off and injected at given points. Soft-ware defined connections may be severed and new connections made. All possible thanks to BICO Tech-nology.With its free function blocks the SIMOVERT MASTERDRIVES VC is in the position to carry out simple PLC (programmable logic controller) functions. BICO Technology enables the free function blocks to be freely configured.6Available as free function blocksare, for example:•fixed setpoints•fault and alarm signal blocks•arithmetic and control blocks•logic blocks•timers•counters•ramp-function generator•wobble generator•technology controllerUsing BICO Technology, flexible drivesolutions for all applications may becreated.With SIMOVERT MASTERDRIVES VCsimple technology functions throughto complex applications, e.g. winders,may be realised.Doing away with external PLCcomponents saves space and re-duces both engineering time andcosts.Function diagram87654321fp_vc_360_e.vsdSpeed controllerMASTERDRIVES VC09.04.98Speed control, master drive- 360 -smooth n/f(set)0...2000 msP221.M (4)KK0150n/f(set)n/f(set,smo'd)r229P241.B (0)KSrcSetV n/f-Reg1P242.B (0)BSrc Set n/f-Reg1P243.B (0)BSrc nf-Reg1 STOPKp TnLimitation active from torque limit,stop I component when torque limits of the unithave been reached;Limit I component to torque limitsK0153T(set, n/f Reg)T(set,reg. off)r255K0154n/f (Reg,P)K0155n/f(Reg,I-Comp)P254.M (50.0)5.0...200.0 HzResonFreqBStopFilter bandwidth0.5...20.0 HzP253.M (0.5)Band-Stop Gain0.0...150.0P251.M (0.0)n/f Reg Time25...32001 msP240.M (400)P233.M (0.0)0.0...200.0 %n/f Reg. Adapt.1P234.M (100.0)0.0...200.0 %n/f-Reg. Adapt.2n/f-Reg. Gain20.0...2000.0P236.M (10.0)n/f-Reg Gain 10.0...2000.0P235.M (~)n/f RegGain(act)r237P232.B (0)KSrc n/f RegAdaptKK0152n/f Deviation+–>0.0%=0.0 %Scale T(Pre)[ 317.7]KK0158n/f(Band-Stop)T3 = 8 xT0B0229Set I Comp act.Smooth n/f(act)0...2000 msP223.M (~)n/f(act,smo'd)r230KK0151n/f(act,smo´d)xyMotor #PolePairs1 (15)P109.M (~)n (act)r219xyn/f(act)r218KK0148n/f(act)To torque pre-control [365.6]From speedprocessing[350.8]Is only calculated if P260 or P262are not connected in diagram 375From setpoint channel[319.8], [329.8]From control word 2 bit 25 [190.5]r014Setp SpeedK0156n/f RegGain(act)B0228n/f-Reg.StopP238.B (1)KSrc n-RegGain n957.15 = 3P256.B (173)KSrc M(lim,reg1)MINK0161Mmax1(reg,act)P257.B (173)KSrc T(lim,reg2)MAXK0162Mmax2(reg,act)M(lim,act)[369], [370]T(lim2,act)[369], [370]xy[371.5] ... [374.5]DA65-6367F MF 1d n/d tD n F JD V n +M +FD ManeuveringV setboostactset Power sectionSpeed controllerCurrent controllerFriction torque act actGain-adaptionGain-adaptionactTaper tension characteristic Jog setpointTension controlactInertia characteristicDiameter calculatoractconstD A 65-6034Datum Bearb. Zelder09.11.0130A&D MC PM5Siemens AG Dateifp_winder_030_e.vsdSeite Diameter- Speed calculationWinder concept, Basic drive CUMC/VCy x x =43U951.32 =4U961.32 =1085KK0484K0471U115 (0).01x4K0401.02x x 12•x1x2K0501.03y2=x4100%x3 (16bit)y2ScalingK0483y when division by 0 (x3=0):x4 > 0 :y =+199,99 %x4 = 0 :y =0,00 %x4 < 0 :y = -199,99 %value range of X4: -400 % ...+400 %;in case of KK0484 limited on range -200% (200)<1>(32bit)(32bit)200%-200%200%-200%D min [%]Transformation line speed setpoint -> speed setpointn set [%] (Source main speed setpoint)D act [%] (Output limiter)V set [%]Jog line speed setpointto [40.C2]from [35.B7]from [30.C6]KK0470.01U176 (0)U950.86 =4U960.86 =1065KK0526KK0470U177 (0)B0601.02KK040501Jog OFF: 0Jog ON: 1V set [%]U951.31 =4U961.31 =1055KK0404U110 (0).01yKK0001.02x1x2100 %•x1x2200%-200%Maneuvering input (e.g. analog input)Line speed setpointU951.05 =4U961.05 =1075K0471K0526U111 (0).01yK0042.02x1x2x x 1100%2•when division by 0 (x2=0):x1 > 0 :y =+199,99 %x1 = 0 :y =0,00 %x1 < 0 :y = -199,99 %200%-200%KK0042Gear ratio k Gto [30.E3]P402.F (100%) -200.00 ... 200.00%K0405U005.F (0%)-200.00...200.00 %V set [%]n act [%]y x x =43U951.06 =4U961.06 =1005KK0482K0404U114 (0).01x4K0401.02x x 12•x1x2K0091.03y2=x4100%x3 (16bit)y2ScalingK0481y when division by 0 (x3=0):x4 > 0 :y =+199,99 %x4 = 0 :y =0,00 %x4 < 0 :y = -199,99 %value range of X4: -400 % ...+400 %in case of KK0482 limited on value range -200% (200)<1>(32bit)(32bit)200%-200%200%-200%Diameter calculation-1-13210U124 (1)0 (3)K0481U123 (0)Smoothing time constant0...10000 ms U125 (100 ms)K0493U952.67 =4U962.67 =1015D act [%] (Input motorpoti)D min [%]to [35.D4]D A 65-60358•4 combined digital inputs/outputs •3 additional digital inputs •1 analog input, current or voltage •1 analog input, voltage•1 analog output, current or voltage •1 analog output, voltage•One RS 232 and one RS 485 interface•••••In In P10 V / N10 V I < 5 mA 5V 24VIn5V24V7819101112R i = 3.4 k 1314P10N101516DADA In 5V24V121718DA S345-10...+10 V DA -10...+10 VMMX102In In AI 1AI 2U : R in = 60 k I : R in = 250 k U : I < 5 mAAO 2AO 192120HS1HS2R i = 3.4 k R in = 60 k 30 V / 0.5 AOutU : I < 5 mA I : 0...+20 mA0...+20 mA3S4-10...+10 V-10...+10 VDA65-5971Ω ΩΩΩΩ 4 bidirectional digital inputs/outputsOutputsReference voltage Digital inputs Analog input 2(non-floating)11 bits + sign (close S3)Analog output 210 bits + sign Analog output 110 bits + sign InputsDigital input Analog input 1(non-floating)11 bits + sign Floating switch A9MASTERDRIVES VC Compact PLUS10Converters 3-ph. 380 V –15% to 480 V +10% 50/60 HzNominal Rated Line Order No.Dimensions Weight Cooling Soundpower output Short-time current W x H x D air re-press.rating current I n current1)*)quirement levelkW A A A mm kg m3/s db (A)0.55 1.5 2.4 1.76SE7011-5EP60 45 x 360 x 260 3.00.002181.1 3.0 4.8 3.36SE7013-0EP6067.5 x 360 x 260 3.70.009401.5 5.0 8.0 5.56SE7015-0EP6067.5 x 360 x 260 3.70.009403 8.012.8 8.86SE7018-0EP60 90 x 360 x 260 4.10.01837410.016.011.06SE7021-0EP60 90 x 360 x 260 4.20.018375.514.022.415.46SE7021-4EP60135 x 360 x 26011.10.041487.520.532.822.66SE7022-1EP60135 x 360 x 26011.20.041481127.043.229.76SE7022-7EP60180 x 360 x 26015.30.061591534.054.437.46SE7023-4EP60180 x 360 x 26015.50.06159*)Rated line current of a converter excluding additional inverters. If the converter supplies additional inverters then this value is 1.76 x I n (I n = rated output current).Within the compact PLUS series, additional inverters may be connected to a converter unit via the DC link bus.The sum of the nominal power ratings of the complete system may equal twice the nominal power rating of the converter.For the infeeding power, a coincidence factor of 0.8 must be taken into account, i.e. the rectifier of the converter is thermically designed for 1.6 times the nominal power of the converter.The converter switched mode power supply can supply an additional 2 inverters with 24 V DC power(in the case of a 6SE7011-5EP60 converter only 1 additional inverter may be supplied).A capacitor module may be connected to the converter for short-time energy storage.Inverters DC 510 V –15% to 650 V +10%Nominal Rated DC link Order No.Dimensions Weight Cooling Sound Aux. currentpower output Short-time rated W x H x D air re-press.24 V DCrating current I n current1)current quirement level(max. at 20 V)kW A A A mm kg m3/s db (A)A0.75 2.0 3.2 2.46SE7012-0TP6045 x 360 x 260 2.60.00218 1.51.5 4.0 6.4 4.86SE7014-0TP6067.5 x 360 x 260 3.20.00940 1.52.2 6.1 9.8 7.36SE7016-0TP6067.5 x 360 x 2603.30.00940 1.5410.216.312.16SE7021-0TP6090 x 360 x 260 3.40.01837 1.55.513.221.115.76SE7021-3TP60135 x 360 x 260 8.90.0414827.517.528.020.86SE7021-8TP60135 x 360 x 260 9.10.0414821125.540.830.36SE7022-6TP60135 x 360 x 260 9.30.0414821534.054.440.56SE7023-4TP60180 x 360 x 26013.80.06159218.537.560.044.66SE7023-8TP60180 x 360 x 26014.00.0615921)Short-time current1.6 x I n for 30 s1.36 x I n for 60 srefer to diagram on page 111.36 x I n for 60 srefer to diagram above2)The busbars E-Cu 3x10 have a rated current of 120 A. The 100 kW rectifier unit must therefore be located in the middle of the multi-motor drive configuration,so that the DC link current is shared equally to the inverters connected to the left and the right of the rectifier unit.1112MASTERDRIVES VC Compact PLUS13Braking resistorsRated braking power Short-time braking Continuous braking Resistance Order No.Dimensions Weight power power W x H x D P20P3PDB kWkWkWOhmmmkg5 7.5 1.25806SE7018-0ES87-2DC0145 x 180 x 5406 10 15 2.5406SE7021-6ES87-2DC0145 x 360 x 54012 20 30 5206SE7023-2ES87-2DC0450 x 305 x 48517 50 7512.5 86SE7028-0ES87-2DC0745 x 305 x 4852710015025 46SE7031-6ES87-2DC0745 x 605 x 48547Capacitor moduleCapacitance max. DC link voltage Order No.DimensionsWeight continuous short-time W x H x D mFVVmmkg5.17157806SE7025-0TP87-2DD090 x 360 x 2606DC link moduleContinuous current Voltage rangeOrder No.Dimensions Weight W x H x D Ammkg120510 V DC –15% to 650 V +10%6SE7090-0XP87-3CR090 x 360 x 260 2.6Radio interference suppression filtersRated current Integrated Limit-Typ. power loss Order No.Weight line reactor value class2% u kAWkg2yes B1 56SE7012-0EP87-0FB0 2 6yes B1 136SE7016-0EP87-0FB0 3.5 12yes B1 236SE7021-2EP87-0FB0 5.5 18yes B1 266SE7021-8EP87-0FB0 7.5 36no B1 306SE7023-4ES87-0FB1 4 80no B1 406SE7027-2ES87-0FB110190no A1 706SE7031-8ES87-0FA013320no A11006SE7033-2ES87-0FA121Commutating reactors 2% u kRated current Power loss Order No.Weight 50/60 Hz approx.AWkg1.5 8/104EP3200-4US 1 312/184EP3200-5US 1 523/354EP3200-2US 1 9.135/384EP3400-2US 1.511.235/384EP3400-1US 1.51645/484EP3500-0US 21852/574EP3600-4US 32852/574EP3600-5US 3Rated current Power loss Order No.Weight 50/60 Hz approx.AWkg35.5 57/604EP3700-2US 4 40 57/604EP3700-5US 4 50 67/714EP3800-2US 5 63 67/714EP3800-7US 5 80 82/874EP3900-2US 6.5125 96/1034EP4000-6US10224190/2004EU2552-8UA00-0A 16.5System componentsDC link connectionThe DC link connection is made using three busbars: positive-connection (C), negative-connection (D) and protective earth (PE). Copper busbar E-Cu 3x10 tinned and rounded according to DIN 46 433, rated current 120 A (e.g. Siemens 8WA2 842length 1 m, or Phoenix Contact GmbH & Co., type NLS-Cu 3/10 Internet: )3000 1/min15MASTERDRIVES VC Compact PLUSDimensionsRectifier unitsFront views without front coverDC link and capacitor moduleConverter 0.55 kW 1.1/1.5 kW 3 kW and 4 kW 5.5/7.5 kW 11/15 kW Inverter0.75 kW1.5/2.2 kW4 kW5.5/7.5/11 kW15/18.5 kWFront views without front coverMASTERDRIVES VC Compact PLUSBraking resistor 100 kW6SE7031-6ES87-2DC016MASTERDRIVES VC Compact PLUS6SE7012-0EP87-0FB0MASTERDRIVES VCCompact PLUS ArrayScrew terminal 8WA9 200(for I≤ 15 A)LNSolid0.5 mm2 to 6.0 mm2Finely stranded 1.5 mm2to 4.0 mm2Screw terminal RKW 110 or16 A to 35.5 A)TRKSD 10 (for ILNSolid 1.0 mm2 to 16.0 mm2Finely stranded 1.0 mm2to 10.0 mm2Earthing stud M 6 x 12Solid 2.5 mm2 to 10.0 mm2Finely stranded 4.0 mm2to 10.0 mm2Screw terminal RKW 110≤ 40 A)or TRKSD 10 (for ILNSolid 1.0 mm2 to 16.0 mm2Finely stranded 1.0 mm2to 10.0 mm2Earthing stud M 6 x 12Solid 2.5 mm2 to 10.0 mm2Finely stranded 4.0 mm2to 10.0 mm2Screw terminal 8WA1 30440 A to 50 A)(for ILNSolid 1.0 mm2 to 16.0 mm2Stranded10.0 mm2 to 25.0 mm2Finely stranded 2.5 mm2to 16.0 mm2Earthing terminalEK 16/35Solid 2.5 mm2 to 16.0 mm2Finely stranded 4.0 mm2to 16.0 mm2MASTERDRIVES VC Compact PLUSSiemens AGAutomation and Drives Group Motion Control SystemsP .O. Box 3269, 91050 Erlangen Federal Republic of Germany Siemens AktiengesellschaftOrder No. 6ZB5711-0AA02-0BA0Printed in the Federal Republic of Germany 18401/222198 SV 1101 4.0© Siemens AG 2001Subject to change without prior notice Additional information about SIMOVERT MASTERDRIVEScan be found in our Catalogs DA 65.10 and DA 65.11Information about this product can befound in the Internet under:http://www.siemens.de/automation/mc。
心理学英文术语

感觉记忆(SM)—sensory memory短期记忆(STM)—short-term M.长期记忆(LTM)—long-term memory复诵——rehearsal预示(激发)——priming童年失忆症——childhood amnesia视觉编码(表征)——visual code(representation)听觉编码—acoustic code运作记忆——working memory语意性知识—semantic knowledge记忆扫瞄程序—memory scanning procedure竭尽式扫瞄程序-exhaustive S.P.自我终止式扫瞄—self-terminated S.程序性知识—procedural knowledge命题(陈述)性知识——propositional(declarative)knowledge 情节(轶事)性知识—episodic K.讯息处理深度—depth of processing精致化处理—elaboration登录特殊性—coding specificity记忆术—mnemonic位置记忆法—method of loci字钩法—peg word(线)探索(测)(激发)字—prime关键词——key word命题思考——propositional thought心像思考——imaginal thought行动思考——motoric thought概念——concept原型——prototype属性——property特征——feature范例策略——exemplar strategy语言相对性(假说)—linguistic relativity th.音素——phoneme词素——morpheme(字词的)外延与内涵意义—denotative & connotative meaning (句子的)表层与深层结构—surface & deep structure语意分析法——semantic differential全句语言—holophrastic speech过度延伸——over-extension电报式语言—telegraphic speech关键期——critical period差异减缩法——difference reduction方法目的分析——means-ends analysis倒推——working backward动机——motive自由意志——free will决定论——determinism本能——instinct种属特有行为——species specific驱力——drive诱因——incentive驱力减低说——drive reduction th.恒定状态(作用)—homeostasis原级与次级动机—primary & secondary M. 功能独立—functional autonomy下视丘侧部(LH)—lateral hypothalamus 脂肪细胞说——fat-cell theory.下视丘腹中部(VMH)—ventromedial H 定点论——set point th.CCK———胆囊调节激素第一性征——primary sex characteristic第二性征——secondary sex characteristic自我效能期望—self-efficiency expectancy内在(发)动机—intrinsic motive外在(衍)动机—extrinsic motive成就需求——N. achievement需求层级—hierarchy of needs自我实现——self actualization冲突——conflict多项仪——polygraph肤电反应——GSR(认知)评估——(cognitive appraisal)脸部回馈假说——facial feedback hypothesis(生理)激发——arousal挫折-攻击假说——frustration-aggression hy.替代学习——vicarious learning短期记忆(STM)—short-term M.长期记忆(LTM)—long-term memory复诵——rehearsal预示(激发)——priming童年失忆症——childhood amnesia视觉编码(表征)——visual code(representation)听觉编码—acoustic code运作记忆——working memory语意性知识—semantic knowledge记忆扫瞄程序—memory scanning procedure竭尽式扫瞄程序-exhaustive S.P.自我终止式扫瞄—self-terminated S.程序性知识—procedural knowledge命题(陈述)性知识——propositional(declarative)knowledge 情节(轶事)性知识—episodic K.讯息处理深度—depth of processing精致化处理—elaboration登录特殊性—coding specificity记忆术—mnemonic位置记忆法—method of loci字钩法—peg word(线)探索(测)(激发)字—prime关键词——key word命题思考——propositional thought心像思考——imaginal thought行动思考——motoric thought概念——concept原型——prototype属性——property特征——feature范例策略——exemplar strategy语言相对性(假说)—linguistic relativity th.音素——phoneme词素——morpheme(字词的)外延与内涵意义—denotative & connotative meaning (句子的)表层与深层结构—surface & deep structure语意分析法——semantic differential全句语言—holophrastic speech过度延伸——over-extension电报式语言—telegraphic speech关键期——critical period差异减缩法——difference reduction方法目的分析——means-ends analysis倒推——working backward动机——motive自由意志——free will决定论——determinism本能——instinct种属特有行为——species specific驱力——drive诱因——incentive驱力减低说——drive reduction th.恒定状态(作用)—homeostasis原级与次级动机—primary & secondary M. 功能独立—functional autonomy下视丘侧部(LH)—lateral hypothalamus 脂肪细胞说——fat-cell theory.下视丘腹中部(VMH)—ventromedial H 定点论——set point th.CCK———胆囊调节激素第一性征——primary sex characteristic第二性征——secondary sex characteristic 自我效能期望—self-efficiency expectancy 内在(发)动机—intrinsic motive外在(衍)动机—extrinsic motive成就需求——N. achievement需求层级—hierarchy of needs自我实现——self actualization冲突——conflict多项仪——polygraph肤电反应——GSR(认知)评估——(cognitive appraisal)脸部回馈假说——facial feedback hypothesis(生理)激发——arousal挫折-攻击假说——frustration-aggression hy.替代学习——vicarious learning 发展——development先天——nature后天——nurture成熟——maturation(视觉)偏好法——preferential method习惯法——habituation视觉悬崖——visual cliff剥夺或丰富(环境)——deprivation or enrichment of env. 基模——schema同化——assimilation调适——accommodation平衡——equilibrium感觉动作期——sensorimotor stage物体永久性——objective permanence运思前期——preoperational st.保留概念——conservation道德现实主义——moral realism具体运思期——concrete operational形式运思期——formal operational st.前俗例道德——pre-conventional moral俗例道德——conventional moral超俗例道德——post-conventional moral气质——temperament依附——attachment性别认定——gender identity性别配合——sex typing性蕾期——phallic stage恋亲冲突—Oedipal conflict认同——identification社会学习——social learning情结——complex性别恒定——gender constancy青年期——adolescence青春期—— -puberty第二性征——secondary sex characteristics 认同危机——identity crisis定向统合——identity achievement早闭型统合——foreclosure未定型统合——moratorium迷失型统合——identity diffusion传承——generativity心理动力——psycho-dynamics心理分析——psychoanalysis行为论——behaviorism心理生物观——psycho-biological perspective 认知——cognition临床心理学家-clinical psychologist谘商——counseling人因工程——human factor engineering组织——organization潜意识——unconsciousness完形心理学——Gestalt psychology感觉——sensation知觉——perception实验法——experimental method独变项——independent variable依变项——dependent V.控制变项——control V.生理——physiology条件化——conditioning学习——learning比较心理学——comparative psy.发展——development社会心理学——social psy.人格——personality心理计量学—psychometrics受试(者)——subject 实验者预期效应—experimenter expectancy effect 双盲法——double—blind实地实验——field experiment相关——correlation调查——survey访谈——interview个案研究——case study观察——observation心理测验——psychological test纹理递变度——texture gradient注意——attention物体的组群——grouping of object型态辨识—pattern recognition形象-背景——figure-ground接近律——proximity相似律——similarity闭合律——closure连续律——continuity对称律——symmetry错觉——illusion幻觉——delusion恒常性——constancy大小——size形状——shape位置—— location单眼线索——monocular cue线性透视——linear- perspective 双眼线索——binocular cue深度——depth调节作用——accommodation 重迭——superposition双眼融合——binocular fusion 辐辏作用——convergence双眼像差——binocular disparity向度—— dimension自动效应——autokinetic effect运动视差—— motion parallax诱发运动—— induced motion闪光运动—— stroboscopic motion上下文、脉络-context人工智能——artificial intelligence A.I. 脉络关系作用-context effect模板匹配——template matching整合分析法——analysis-by-synthesis 丰富性——redundancy选择性——selective无意识的推论-unconscious inferences 运动后效——motion aftereffect特征侦测器—feature detector激发性——excitatory抑制性——inhibitory几何子——geons由上而下处理—up-down process由下而上处理——bottom-up process连结者模式——connectionist model联结失识症——associative agnosia脸孔辨识困难症——prosopagnosia意识——conscious(ness)意识改变状态——altered states of consciousness无意识——unconsciousness前意识——preconsciousness内省法——introspection边缘注意——peripheral attention多重人格——multiple personality午餐排队(鸡尾酒会)效应—lunch line(cocktail party)effect 自动化历程——automatic process解离——dissociate解离认同失常——dissociative identity disorder快速眼动睡眠——REM dream非快速眼动睡眠—NREM dream失眠——insomnia显性与隐性梦——manifest & latern content心理活动性psychoactive冥想——meditation抗药性——tolerance戒断——withdrawal感觉剥夺——sensory deprivation物质滥用——substance abuse成瘾——physical addiction物质依赖——sub. dependence戒断症状——withdrawal symptom兴奋剂——stimulant幻觉(迷幻)剂——hallucinogen镇定剂——sedative抑制剂——depressant酒精中毒引起谵妄—delirium tremens麻醉剂——narcotic催眠——hypnosis催眠后暗示——posthypnotic suggestion 催眠后失忆posthypnotic amnesia超心理学——parapsychology超感知觉extrasensory perception ESP 心电感应——telepathy超感视——clairvoyance预知——precognition心理动力—psycokinesis PK受纳器——receptor绝对阈——absolute threshold 差异阈——difference threshold 恰辨差——-JND韦伯律——Weber''s law心理物理——psychophysical 费雪纳定律——Fechner''s law 频率——frequency振幅——amplitude音频——pitch基音——fundamental tone倍音——overtone和谐音——harmonic音色——timbre白色噪音——white noise鼓膜——eardrum耳蜗——cochlea卵形窗—oval window圆形窗——round window前庭——vestibular sacs半规管——semicircular canals角膜——cornea水晶体——lens虹膜——iris瞳孔——pupil网膜——retina睫状肌——ciliary muscle调节作用——accommodation脊髓——spinal cord反射弧——reflex arc脑干——brain stem计算机轴性线断层扫描——CAT或CT PET——正子放射断层摄影MRI——磁共振显影延脑——medulla桥脑——pons小脑——cerebellum网状结构——reticular formation RAS——网状活化系统视丘——thalamus下视丘——hypothalamus大脑——cerebrum脑(下)垂体(腺)—pituitary gland脑半球——cerebral hemisphere皮质——cortex胼胝体——corpus callosum边缘系统——limbic system海马体——hippocampus杏仁核——amygdala中央沟——central fissure侧沟——lateral fissure脑叶——lobe同卵双生子——identical twins异卵双生子—fraternal twins古典制约——classical conditioning操作制约——operant conditioning非制约刺激—(US unconditioned stimulus 非制约反应—(UR)unconditioned R.制约刺激——(CS)conditioned S.制约反应——(CR)conditioned R.习(获)得——acquisition增强作用——reinforcement消除(弱)——extinction自(发性)然恢复——spontaneous recovery前行制约—forward conditioning同时制约——simultaneous conditioning回溯制约——backward cond.痕迹制约——trace conditioning延宕制约—delay conditioning类化(梯度)——generalization(gradient)区辨——discrimination(次级)增强物——(secondary)reinforcer嫌恶刺激——aversive stimulus试误学习——trial and error learning效果率——law of effect正(负)性增强物—positive(negative)rei.行为塑造—behavior shaping循序渐进——successive approximation自行塑造—autoshaping部分(连续)增强—partial(continuous)R定比(时)时制—fixed ratio(interval)schedule FR或FI变化比率(时距)时制—variable ratio(interval)schedule VR或VI 逃离反应——escape R.回避反应—avoidance response习得无助——learned helplessness顿悟——insight学习心向—learning set隐内(潜在)学习——latent learning 认知地图——cognitive map生理回馈——biofeedback敏感递减法-systematic desensitization 普里迈克原则—Premack''s principle 洪水法——flooding观察学习——observational learning 动物行为学——ethology敏感化—sensitization习惯化——habituation联结——association认知学习——cognitional L.观察学习——observational L.登录、编码——encoding保留、储存——retention提取——retrieval回忆——(free recall全现心像、照相式记忆——eidetic imagery、photographic memory . 舌尖现象(TOT)—tip of tongue再认——recognition再学习——relearning节省分数——savings外显与内隐记忆——explicit & implicit memory记忆广度——memory span组集——chunk序列位置效应——serial position effect起始效应——primacy effect新近效应——recency effect心(情)境依赖学习——state-dependent L.无意义音节—nonsense syllable顺向干扰——proactive interference逆向干扰——retroactive interference闪光灯记忆——flashbulb memory动机性遗忘——motivated forgetting器质性失忆症—organic amnesia阿兹海默症——Alzheimer''s disease近事(顺向)失忆症—anterograde amnesia旧事(逆向)失忆—retrograde A.高沙可夫症候群—korsakoff''s syndrome 凝固理论—consolidation。
谐波减速器设计

• (2)谐波齿轮传动的结构尺寸优化设计
• 为实现谐波齿轮传动的体积小,重量轻的目标,以凸轮波形发生器的 凸轮尺寸为限制尺寸,利用MATLAB软件,对谐波齿轮传动的结构尺 寸进行优化设计
2014-11-30
• 在谐波传动中柔轮会发生弹性形变,且工作中其几何与力 学模型是非常复杂的,特别是其应变规律与应力分布情况 对整个传动的影响非常大。 • 因此对谐波减速器的建模研究及柔轮应力应变分析是非常 必要的。 • 利用SolidWorks软件对谐波三大组件进行三维简化建模, 使模型能顺利导入到ANSYS有限元软件中,并保证模型精 度,在ANSYS中进行优化设计
1传动比的计算及刚轮柔轮齿数的确定2齿轮传动设计a柔轮主要几何参数选择和计算齿形主要啮合参数的选择和计算材料及主要结构尺寸的选择和计算参数化模型建立借助matlab进行优化程序设计b刚轮和波形发生器的设计3传动优化设计齿轮齿廓啮合干涉验算柔轮的受力分析强度计算及校核3柔轮刚轮波形发生器的实体模型建立4柔轮有限元分析13将最优化数学理论与具有强大数值计算功能的软件matlab相结合运用到谐波齿轮减速器优化设计过程中
参考文献
[1] 辛洪兵,谢金瑞,谐波传动技术及研究动向.北京轻工业学 院学报,1999.17(1): p.30-36. [2] 北京谐波传动技术研究所, 谐波传动技术的新发展. 齿轮, 1991. 15(2): p. 52-55. [3] 沈允文,谐波齿轮传动柔轮的实验模态分析 1994(01) [4] 李召华;扬帆;韩梅谐波齿轮传动装置的传动精度分析 2010(02) [5] 孙恒,陈作模. 机械原理 [M].7版. 北京:高等教育出版社, 2006. [6] 闫艳红;塑料谐波齿轮传动结构尺寸的优化设计[J];机械设 计;2002年10期 [7] 张春宜 郝广平 刘敏 减速器设计实例精解 2009.7 机械工 业出版社 [8] 乔峰丽,郑江 机械设计基础 2011.1 电子工业出版社 [9] 张佑林.刘文波.李峰活齿端面谐波齿轮啮合状态的几何模 型[期刊论文]-武汉理工大学学报 2004(10) [10] 姚俊武.王建中谐波减速器在自重构机器人的应用研究 [期刊论文]-制造业
音响专业术语

AFL=After-fader Listen 衰减后监听(推子后监听),这个模式下,监听输出的信号是来自于通道电平推杆以后的信号Aux. =Auxiliary 辅助Aux.return 辅助返回(或Aux.RTN.或Aux.RET.)用于接收音频处理设备(如效果器,激励器)处理后的音频信号与主输出信号加以混合。
Aux.send 辅助送出,一般用于输出信号供信号处理设备进行处理,或输出舞台监听信号。
Balance 平衡,一般用于立体声输入通道,确定两路输入信号各自的平衡。
Bus 母线,公共线,调音台内部的信号线路流程,多路信号汇合到某个线路上,这条线路就是母线,一般的辅助和编组都是母线结构Clip 削波指示,此指示灯点亮或信号电平指示表达到这个位置,表明输入或输出信号已经达到顶点。
Cue 提示,监听,按下后可以在监听耳机或监听通道监听此路的信号。
Direct 直接的(输出)插口Effect 效果EQ=Equalizer 均衡器,调音台的均衡一般分三段或四段,有些具有扫频功能,可以对选定的频段进行电平的提升或衰减。
Fader 衰减器,推子Foldback 返送Gain 增益,放大量Group 编组HF=High Frequency 高频段HP=Headphone=Phones 耳机INS. =Insert 断点插入插口,也称又出又进插口,这个插座一般用于将一个信号处理设备直接插入到调音台的某个输入或者输出通道,对该通道的音频信号进行更精细的处理。
Level 电平LF=Low Frequency 低频段Limit 限制Line in线路或高阻抗设备输入插口LMF=Low-Mid Frequency 中低频段Low cut 低频切除(例如切去100Hz以下频率成分)L-R=Left-Right 左-右Main Sum 混合单声道,这个输出插座输出调音台内部混合好的单声道信号。
Master 主控,主输出。
harmonic drive

harmonic driveHarmonic Drive: An Overview and ApplicationsIntroduction:In the field of engineering and robotics, there are various mechanisms that play a crucial role in achieving precision and efficiency. One such mechanism is the harmonic drive. Developed by C.W. Musser in the 1950s, harmonic drives have gained immense popularity due to their unique characteristics and applications in diverse industries. This document provides an overview of the harmonic drive, its working principle, advantages, limitations, and various applications where it is widely used.Working Principle:Harmonic drives are based on the principle of strain wave gearing, also known as harmonic gearing. The basic components of a harmonic drive include a wave generator, flex spline, and circular spline. The wave generator, usually an elliptical cam, generates a predetermined wave pattern as its input shaft rotates. The flex spline is a flexible outer ring with teeth and is made of high-strength steel. The circular spline, on the other hand, is a rigid outer ring with internal teeth.When the wave generator rotates, it causes the flex spline to deform and mesh with the circular spline, resulting in a reduction in the speed and an increase in torque. This reduction is achieved through the deformation of the teeth of the flex spline. Though the principle seems simple, the manufacturing and assembly of harmonic drives require extreme precision to ensure optimal performance and reliability.Advantages of Harmonic Drives:1. High gear reduction ratio: Harmonic drives offer high gear reduction ratios, ranging from 30:1 to 320:1, making them ideal for applications requiring precise control and high torque.2. Compact size: Harmonic drives are known for their compact size, which allows engineers to design and implement them in tight spaces. This is especially beneficial in robotics applications where space is limited.3. Backlash-free operation: Due to the elastic deformation of the flex spline, harmonic drives offer backlash-free operation. This is crucial in applications where accuracy and repeatability are essential.4. High torque-to-weight ratio: Harmonic drives can handle high torque loads relatively easily, thanks to their design. Thismakes them suitable for various industrial and automation applications.5. High efficiency: Harmonic drives exhibit high efficiency, typically above 90%. This results in less energy loss and helps in achieving energy-efficient designs.Limitations of Harmonic Drives:Despite their numerous advantages, harmonic drives also have a few limitations that engineers need to consider before implementing them in their designs:1. Cost: Harmonic drives tend to be more expensive than other types of traditional gears. The complex manufacturing process, precision assembly, and use of high-quality materials contribute to the higher cost.2. Limited speed range: Harmonic drives have a limited speed range. At high speeds, the teeth of the flex spline experience significant stresses, which can lead to premature wear and reduced lifespan.3. Sensitivity to shock loading: Harmonic drives are sensitive to shock loading, as it can cause damage to the teeth or the wave generator. Careful consideration is needed to avoid sudden or excessive loads in applications involving harmonic drives.Applications of Harmonic Drives:Harmonic drives find applications in various industries, including robotics, aerospace, medical devices, and automation. Some notable applications include:1. Robotics: Harmonic drives play a crucial role in robotic manipulators, where precise motion control, lightweight design, and compact size are essential.2. Aerospace: In the aerospace industry, harmonic drives are used in applications such as satellite tracking systems, space robotic arms, and UAVs (Unmanned Aerial Vehicles).3. Medical devices: Harmonic drives are widely used in medical devices, including surgical robots, rehabilitation equipment, and diagnostic machines. Their compact size and precise motion control make them ideal for such applications.4. Industrial automation: Harmonic drives are used in various automation systems, including pick-and-place robots, conveyor systems, and assembly line machinery.5. Defense and military: Due to their compact size and high torque output, harmonic drives are used in defense and military applications, such as missile guidance systems and remotely operated vehicles.Conclusion:Harmonic drives have revolutionized the field of engineering and robotics with their unique characteristics and wide range of applications. Their compact design, high gear reduction ratio, and backlash-free operation make them ideal for precision motion control in various industries. While harmonic drives come with some limitations, their benefits outweigh these drawbacks. As technology continues to advance, harmonic drives are likely to become even more prevalent in the future, enabling new and exciting applications that require precise and efficient motion control.。
电机及其控制专业英语词汇
电机及其控制专业英语词汇ac motor 交流电动机active (passive) circuit elements 有(无)源电路元件active component 有功分量active in respect to 相对….呈阻性admittance 导纳air-gap flux distribution 气隙磁通分布air-gap flux 气隙磁通air-gap line 气隙磁化线algebraic 代数的algorithmic 算法的alloy 合金ampere-turns 安匝(数)amplidyne 微场扩流发电机Amplitude Modulation (AM) 调幅armature circuit 电枢电路armature coil 电枢线圈armature m.m.f. wave 电枢磁势波attenuate 衰减automatic station 无人值守电站automatic Voltage regulator(AVR)自动电压调整器auxiliary motor 辅助电动机bandwidth 带宽base 基极bilateral circuit 双向电路bimotored 双马达的biphase 双相的bipolar junction transistor (BJT) 双极性晶体管block diagram 方框图boost 增加breakaway force 起步阻力breakdown torque 极限转矩bronze 青铜buck 补偿capacitance effect 电容效应carbon-filament lamp 碳丝灯泡carrier 载波Cartesian coordinates 笛卡儿坐标系cast-aluminum rotor 铸铝转子chopper circuit 斩波电路circuit branch 支路circuit components 电路元件circuit diagram 电路图circuit parameters 电路参数coaxial 共轴的,同轴的coil winding 线圈绕组coincide in phase with 与….同相collector 集电极converter 变流器commutation condition 换向状况commutator-brush combination 换向器-电刷总线complex impedance 复数阻抗complex number 复数compound generator 复励发电机compounded 复励conductance 电导conductor 导体corridor 通路coupling capacitor 耦合电容cumulatively compounded motor 积复励电动机dc generator 直流发电机dc motor 直流电动机de machine 直流电机demodulator 解调器differentiation 微分digital signal processing 数字信号处理digital signal processor (DSP) 数字信号处理器direct axis transient time constant 直轴瞬变时间常数direct axis 直轴direct-current 直流direct torque control (DTC) 直接转矩控制displacement current 位移电流dynamic response 动态响应dynamic-state operation 动态运行e.m.f = electromotive fore 电动势eddy current 涡流effective values 有效值effects of saturation 饱和效应electric energy 电能electrical device 电气设备electrode 电极电焊条electromagnetic torque 电磁转矩emitter 发射管放射器发射极end ring 端环energy converter 电能转换器epoch angle 初相角equivalent T – circuit T型等值电路error detector 误差检测器error signal 误差信号excitation system 励磁系统excited by 励磁exciting voltage 励磁电压external armature circuit 电枢外电路external characteristic 外特性feedback component 反馈元件feedback loop 反馈回路feedback signal 反馈信号feedback system 反馈系统feedforward signal 前馈信号feedforward system 前馈系统fidelity 保真度field coils 励磁线圈field current 励磁电流field effect transistor (FET) 场效应管field oriented control (FOC) 磁场定向控制field winding 磁场绕组励磁绕组flux linkage 磁链form-wound 模绕forward transfer function 正向传递函数Frequency Shift Keying(FSK) 移频键控frequency 频率full load 满载full-load torque 满载转矩full-order observer 全阶观测器gain 增益generating 发电generator voltage 发电机电压Geometrical position 几何位置harmonic 谐波的heating appliance 电热器high frequency 高频high-gain 高增益high-performance 高性能的horsepower (HP) 马力horseshoe magnet 马蹄形磁铁hydropower station 水电站ideal source 理想电源imaginary part 虚部impedance 阻抗incident 入射的induced current 感生电流induction generator 感应发电机induction machine 感应电机induction machine 感应式电机induction motor 感应电动机inductive component 感性(无功)分量infinite voltage gain 无穷大电压增益inrush current 涌流instantaneous electric power 瞬时电功率instantaneous mechanical power 瞬时机械功率insulation 绝缘integration 积分下限internal resistance 内阻interoffice 局间的inverse 倒数inverter 逆变器iron-loss 铁损isolation 隔离分离绝缘隔振laminated core 叠片铁芯lamination 叠片leakage current 漏电流leakage flux 漏磁通leakage reactance 漏磁电抗leakage 泄漏left-hand rule 左手定则light emitting diode 发光二极管lightning shielding 避雷limiter 限幅器line trap 限波器linear zone 线性区line-to-neutral 线与中性点间的load characteristic 负载特性load-saturation curve 负载饱和曲线locked-rotor torque 锁定转子转矩locked-rotor 锁定转子magnetic amplifier 磁放大器magnetic circuit 磁路magnetic field 磁场magnetic torque 电磁转矩magnetizing reacance 磁化电抗manual control 手动控制mature 成熟的mechanical rectifier 机械式整流器micro-controller 微控制器mid-frequency band 中频带mismatch 失配model reference adaptive control (MRAS) 模型参考自适应控制model reference adaptive system (MRAS) 模型参考自适应系统modulator 调制器modulus 模motoring 电动机驱动mutual flux 交互(主)磁通mutual-inductor 互感no-load 空载number of poles 极数observer 观测器operating condition 运行状态operational calculus 算符演算optical fiber 光纤Oscillation 振荡overhauling 检修P.D. = potential drop 电压降per unit value 标么值percentage 百分数performance characteristic 工作特性permanent magnet 永磁permanent magnet synchronous motor 永磁同步电机per-unit value 标么值phase displacement 相位差Phase Modulation (PM) 相位调制phase reversal 反相plugging 反向制动polarity 极性pole 极点polyphase rectifier 多相整流器polyphase rectifier 多相整流器Polyphase 多相(的)potential distribution 电位分布potential transformer 电压互感器power amplifier 功率放大器power frequency 工频primary cell 原生电池prime motor 原动机prime mover 原动机process of self – excitation 自励过程propagate 传导传播r.m.s values = root mean square values 均方根值random-wound 散绕reactive component 无功分量reactive in respect to 相对….呈感性reactive power 无功功率real part 实部rectifier 整流器reference Voltage 基准电压regeneration 再生, 后反馈放大regulator 调节器reluctance 磁阻retarding torque 制动转矩revolutions per minute 转/分revolutions per second 转/秒rheostat 变阻器right-hand rule 右手定则rotating commutator 旋转(整流子)换向器rotating magnetic field 旋转磁场rotor (stator) winding 转子(定子绕组)rotor core 转子铁芯rotor resistance 转子电阻rotor 转子salient poles 凸极saturation curve 饱和曲线saturation effect 饱和效应self–excitation process 自励过程self excited 自励self-bias resistor 自偏置电阻self-exciting 自励的self-inductor 自感self-sensing 位置自检测sensorless 无传感器的separately excited 他励的series excited 串励series 串励shaft 轴shaft-less 无轴承的short-circuiting ring 短路环shunt displacement current 旁路位移电流shunt excited 并励shunt field 并励磁场shunt 并励shunt 分路器signal amplifier 小信号放大器silica 硅石二氧化硅Single Side Band(SSB) 单边带sinusoidal – density wave 正弦磁密度sinusoidal time function 正弦时间函数slip 转差率solid state 固体solt 槽spatial waveform 空间波形spectral 频谱的spectrum 频谱speed regulation 速度调节speed-torque characteristic 速度转矩特性speed-torque curve 转速力矩特性曲线squirrel cage 鼠笼stabilization network 稳定网络stabilizer 稳定器stabilizing transformer 稳定变压器staor winding 定子绕组stator 定子steady–state condition 稳态条件steady direct current 恒稳直流电storage battery 蓄电池summing circuit 总和线路反馈系统中的比较环节synchronous condenser 同步进相(调相)机synchronous generator 同步发电机synchronous reactance 同步电抗synchronous reluctance motor (SRM) 同步磁阻电机synchronous speed 同步转速technical specifications 技术条件terminal voltage 端电压the dielectric 电介质time constant 时间常数time delay 延时time invariant 时不变的time-phase 时间相位transformer 变压器transient response 瞬态响应transistor 晶体管triangular symbol 三角符号trigonometric transformations 瞬时值tuner 调谐器turns ratio 变比匝比two-way configuration 二线制unidirectional current 单方向性电流variable frequency drive (VFD) 变频器vector equation 矢量方程vector control 矢量控制voltage across the terminals 端电压voltage control system 电压控制系统volt-ampere characteristics 伏安特性waveguide 波导波导管wind-driven generator 风动发电机winding loss 绕组(铜)损耗winding 绕组。
水平多关节型机器人 LS20-B系列 机器人手册说明书
机器人手册LS20-B 系列 Rev.4水平多关节型机器人LS20-B系列机器人手册Rev.4Copyright 2019-2020 SEIKO EPSON CORPORATION. All rights reserved.iLS20-B Rev.4前言感谢您购买本公司的机器人系统。
本手册记载了正确使用机器人所需的事项。
安装该机器人系统前,请仔细阅读本手册与其他相关手册。
阅读之后,请妥善保管,以便随时取阅。
保修本机及其选装部件是经过本公司严格的质量控制、测试和检查,并在确认性能满足本公司标准之后出厂交付的。
在交付产品的保修期内,本公司仅对正常使用时发生的故障进行免费修理。
(有关保修期事项,请咨询您的区域销售办事处。
)但在以下情况下,将对客户收取修理费用(即使在保修期内):1. 因不同于手册内容的错误使用以及使用不当而导致的损坏或故障。
2. 客户未经授权进行拆卸导致的故障。
3. 因调整不当或未经授权进行修理而导致的损坏。
4. 因地震、洪水等自然灾害导致的损坏。
警告, 小心, 使用:1. 如果机器人或相关设备的使用超出本手册所述的使用条件及产品规格,将导致保修无效。
2. 本公司对因未遵守本手册记载的“警告”与“注意”而导致的任何故障或事故,甚至是人身伤害或死亡,均不承担任何责任,敬请谅解。
3. 本公司不可能预见所有可能的危险与后果。
因此,本手册不能警告用户所有可能的危险。
ii LS20-B Rev.4商标Microsoft、Windows及Windows标识为美国Microsoft Corporation在美国及其它国家的注册商标或商标。
其它品牌与产品名称均为各公司的注册商标或商标。
注意事项禁止擅自复印或转载本手册的部分或全部内容。
本手册记载的内容将来可能会随时变更,恕不事先通告。
如您发现本手册的内容有误或需要改进之处,请不吝斧正。
制造商联系方式有关咨询处的详细内容,请参阅下记手册序言中的“销售商”。
材质对谐波减速器刚轮的耐磨性能影响
2024年第48卷第4期Journal of Mechanical Transmission材质对谐波减速器刚轮的耐磨性能影响穆晓彪1葛艺2高明艳1杨国强1张朝磊2(1 北京中技克美谐波传动股份有限公司,北京101318)(2 北京科技大学碳中和研究院,北京100083)摘要采用3种谐波减速器用刚轮材料——2Cr13不锈钢、40Cr中碳合金钢、45钢,通过对其显微组织、硬度、三维及二维形貌的显微磨损、摩擦因数的分析,探究不同材料耐磨性能的差异。
结果表明,2Cr13、40Cr的显微组织为回火索氏体,45钢的显微组织为铁素体与珠光体。
2Cr13、40Cr硬度相近且远大于45钢。
2Cr13磨损形貌为黏着与剥落,磨损机制为黏着磨损;40Cr、45钢磨损形貌为犁沟与剥落、犁沟与黏着,磨损机制为磨粒磨损。
3种材料的摩擦因数相差可忽略不计。
2Cr13、40Cr、45钢截面的磨损面积分别为5 008、1 645、6 535 µm2。
硬度相近下,40Cr表现出比2Cr13更优异的耐磨性能。
45钢与摩擦副材料的硬度值相差最大,耐磨性能最差。
关键词谐波减速器刚轮材质磨损机制耐磨性能Influence of Material in Circular Splines of Harmonic Reducers on Wear Resistance Mu Xiaobiao1Ge Yi2Gao Mingyan1Yang Guoqiang1Zhang Chaolei2(1 Beijing CTKM Harmonic Drive Co., Ltd., Beijing 101318, China)(2 Institute for Carbon Neutrality, University of Science and Technology Beijing, Beijing 100083, China)Abstract Three kinds of circular spline materials are studied for harmonic reducers, stainless steel 2Cr13, medium carbon alloy steel 40Cr, carbon 45 steel. Through the analysis of microstructure, hardness, three-dimensional and two-dimensional morphology in microwear and friction coefficient, the differences in wear resistance of different materials are attained. The results show that the microstructures of 2Cr13 and 40Cr are tempered sorbite, and the microstructure of 45 steel is ferrite and pearlite. The hardness of the 2Cr13 and 40Cr is similar and much larger than that of the 45 steel. The morphology of 2Cr13 is adhesion and spalling, and the wear mechanism is adhesion wear. The morphology of 40Cr and 45 steel is furrow and spalling, furrow and adhesion, and the wear mechanisms are abrasive wear. The friction coefficients' differences of the three materials are negligible, and the area of wear of 2Cr13, 40Cr and 45 steel are 5 008 µm2, 1 645 µm2and 6 535 µm2. 40Cr exhibits better wear resistance than 2Cr13 with similar hardness. The hardness difference between 45 steel and the friction pair material is the largest, and the wear resistance of the 45 steel is the worst.Key words Harmonic reducer Circular spline materials Wear mechanism Wear resistance0 引言作为一种精密减速器,谐波减速器由刚轮、柔轮与波发生器构成,具有传动比大、体积小、质量轻、传动精度高、结构简单等优点[1],在工业自动化制造、航空航天空间等领域有广泛应用[2-5]。
齿轮的主要术语图解及英文翻译
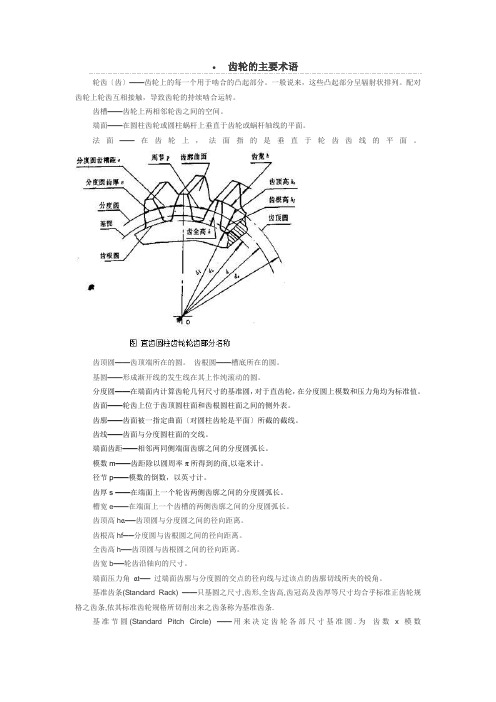
•齿轮的主要术语轮齿〔齿〕——齿轮上的每一个用于啮合的凸起部分。
一般说来,这些凸起部分呈辐射状排列。
配对齿轮上轮齿互相接触,导致齿轮的持续啮合运转。
齿槽——齿轮上两相邻轮齿之间的空间。
端面——在圆柱齿轮或圆柱蜗杆上垂直于齿轮或蜗杆轴线的平面。
法面——在齿轮上,法面指的是垂直于轮齿齿线的平面。
齿顶圆——齿顶端所在的圆。
齿根圆——槽底所在的圆。
基圆——形成渐开线的发生线在其上作纯滚动的圆。
分度圆——在端面内计算齿轮几何尺寸的基准圆,对于直齿轮,在分度圆上模数和压力角均为标准值。
齿面——轮齿上位于齿顶圆柱面和齿根圆柱面之间的侧外表。
齿廓——齿面被一指定曲面〔对圆柱齿轮是平面〕所截的截线。
齿线——齿面与分度圆柱面的交线。
端面齿距——相邻两同侧端面齿廓之间的分度圆弧长。
模数m——齿距除以圆周率π所得到的商,以毫米计。
径节p——模数的倒数,以英寸计。
齿厚s ——在端面上一个轮齿两侧齿廓之间的分度圆弧长。
槽宽e——在端面上一个齿槽的两侧齿廓之间的分度圆弧长。
齿顶高hɑ──齿顶圆与分度圆之间的径向距离。
齿根高hf──分度圆与齿根圆之间的径向距离。
全齿高h──齿顶圆与齿根圆之间的径向距离。
齿宽b──轮齿沿轴向的尺寸。
端面压力角ɑt──过端面齿廓与分度圆的交点的径向线与过该点的齿廓切线所夹的锐角。
基准齿条(Standard Rack) ——只基圆之尺寸,齿形,全齿高,齿冠高及齿厚等尺寸均合乎标准正齿轮规格之齿条,依其标准齿轮规格所切削出来之齿条称为基准齿条.基准节圆(Standard Pitch Circle) ——用来决定齿轮各部尺寸基准圆.为齿数x模数基准节线(Standard Pitch Line) ——齿条上一条特定节线或沿此线测定之齿厚,为节距二分之一.作用节圆(Action Pitch Circle) ——一对正齿轮咬合作用时,各有一相切做滚动圆.基准节距(Standard Pitch) ——以选定标准节距做基准者,与基准齿条节距相等.节圆(Pitch Circle) ——两齿轮连心线上咬合接触点各齿轮上留下轨迹称为节圆.节径(Pitch Diameter) ——节圆直径.有效齿高(Working Depth) ——一对正齿轮齿冠高和.又称工作齿高.齿冠高(Addendum) ——齿顶圆与节圆半径差.齿隙(Backlash) ——两齿咬合时,齿面与齿面间隙.齿顶隙(Clearance) ——两齿咬合时,一齿轮齿顶圆与另一齿轮底间空隙.节点(Pitch Point) ——一对齿轮咬合与节圆相切点.节距(Pitch) ——相邻两齿间相对应点弧线距离.法向节距(Normal Pitch) ——渐开线齿轮沿特定断面同一垂线所测节距.A.1. abrasive tooth wear 齿面研磨磨损2. absolute tangential velocity 绝对切向速度3. accelerometer 加速表4. addendum 齿顶高5. addendum angle 齿顶角6. addendum circle 齿顶圆7. addendum surface 上齿面8. adhesive wear 粘着磨损9. adjustability 可调性10. adjustability coefficients 可调系数11. adjusting wedge 圆盘端铣刀的可调型楔块12. allowable stress 允许应力13. alternate blade cutter 双面刀盘14. angular backlash 角侧隙15. angular bevel gears 斜交锥齿轮16. angular displacement 角移位17. angular pitch 齿端距18. angular testing machine 可调角度试验机19. approach action 啮入20. arbor 心轴21. arbor distance 心轴距22. arc of approach 啮入弧23. arc of recess 啮出弧24. attraction 收紧25. average cutter diameter 平均刀尖直径26. axial displacement 轴向位移27. axial factor 轴向系数28. axial locating surface 轴向定位面29. axial pitch 轴向齿距30. axial plane 轴向平面31. axial rakeangle 轴向前角32. axial thrust 轴向推力33. axle testing machine 传动桥试验机B.1.back angle 背锥角2.Back angle distance 背角距〔在背锥母线方向〕3.Back cone 背锥4.Back cone distance 背锥距5.Back cone element 背锥母线6.Backlash 侧隙7.Backlash tolerance 侧隙公差8.Backlash variation 侧隙变量9.Backlash variation tolerance 侧隙变量公差10.Bandwidth 频带宽11.Base circle 基圆12.Base diameter 基圆直径13.Base pitch 基节14.Base radius 基圆半径15.Base spiral angle 基圆螺旋角16.Basic rack 基本齿条17.Bearing 轴承18.Bearing preload 轴承预负荷19.Bearing spacing/spread 轴承间距20.Bending fatigue 弯曲疲劳21.Bending stress 弯曲应力22.Bevel gears 锥齿轮23.Bias 对角接触24.Bias in 内对角接触25.Bias out 外对角接触26.Blade angle 刀齿齿廓角27.Blade edge radius 刀尖圆角半径28.Blade letter 刀尖凸角代号29.Blade life 刀尖寿命30.Blade point width 刀顶宽31.Blank offset 毛坯偏置距32.Bland position 毛坯位置33.Bottom land 齿槽底面34.Boundary lubrication 界面润滑35.Breakage 破裂36.Bridged contact pattern 桥型接触斑点37.Broach 拉刀38.Burnishing 挤齿C.1. Case crushing 齿面塌陷2. CBN 立方氮化硼3. chamfer 倒角4. chordal addendum 弦齿高5. chordal thickness 弦齿厚6. chuck 卡盘7. circular broach 圆拉刀8. circular face-mill 圆盘端面铣刀9. circular peripheral-mill 圆盘铣刀10. circular pitch 周节11. circular thickness 弧齿厚12. circular thickness factor 弧齿厚系数13. clearance 顶隙14. clearance angle 后角15. coarse pitch 大节距16. coast side 不工作齿侧17. combination 组合18. combined preload 综合预负荷19. complementary crown gears 互补冠状齿轮20. completing cycle 全工序循环21. composite action 双面啮合综合检验误差22. compressive stress 压应力23. concave side 凹面24. concentricity 同心度25. concentricity tester 同心度检查仪26. cone distance 锥距27. cone element 锥面母线28. conformal surfaces 共型外表29. coniskoid 斜锥齿轮30. conjugate gears 共轭齿轮31. conjugate racks 共轭齿条32. contact fatigue 接触疲劳33. contact norma 接触点法线34. contact pattern (tooth contact pattern) 轮齿接触斑点35. contact ratio 重合度36. contact stress 接触应力37. continuous index 连续分度38. control gear 标准齿轮,检验用齿轮39. convex side 凸面40. coolant 冷却液41. corrosive wear 腐蚀性磨损42. corrugated tool 阶梯刨刀43. counter forma surfaces 反法向外表44. cradle 摇台45. cradle test roll 摇台角46. cross 大小端接触47. crossing point 交错点48. crown 齿冠49. crown circle 锥齿轮冠圆50. crowned teeth 鼓形齿51. crown gear 冠轮52. crown to back 〔轮冠距〕轮冠至安装定位面距离53. crown to crossing point 轮冠至相错点距离54. cutter 刀盘55. cutter axial 刀盘的轴向位置56. cutter axial plane 刀盘轴向平面57. cutter axis 刀盘轴线58. cutter diameter 刀盘直径59. cutter edge radius 刀刃圆角半径60. cutter head 刀盘体61. cutter number 刀号62. cutter parallel 刀盘平垫片63. cutter point diameter 刀尖直径64. cutter point radius 刀尖半径65. cutter point width 刀顶距66. cutter spindle 刀盘主轴67. cutter spindle rotation angle 刀盘主轴转角68. cutting distance 切齿安装距69. C.V. testing mashing 常速试验机70. cyclex 格里森粗铣精拉法圆盘端铣刀71. cylindrical gears 圆柱齿轮D.1.Datum tooth 基准齿2.Debur 去毛刺3.Decibel (CB) 〔噪音〕分贝4.Decimal ratio 挂轮比值5.Dedendum 齿根高6.Dendendum angle 齿根角7.Dedendum surface 下齿面8.Deflection 挠曲9.Deflection test 挠曲试验10.Deflection testing machine 挠曲试验机11.Depthwise taper 齿高收缩12.Design data sheet 设计数据表13.Destructive pitting 破坏性点蚀14.Destructive wear 破坏性磨损15.Developed setting 试切调整16.Dial indicator 度盘式指示表17.Diametral pitch 径节18.Diamond 菱形接触19.Dinging ball check 钢球敲击检查20.Disc-mill cuter 盘铣刀21.Dish angle 凹角22.Displacement 位移23.Displacement error 位移误差24.Double index 双分度25.Double roll 双向滚动26.Down roll 向下滚动27.Drive side 工作齿侧28.Duplete 双刃刀29.Duplex 双重双面法30.Duplex helical 双重螺旋法〔加工方法之一〕31.Duplex spread blade 双重双面刀齿〔加工/磨齿方法〕32.Duplex taper 双重收缩齿33.Durability factor 耐久系数34.Dynamic factor 动载荷系数E1.Ease-off 修正、失配2.Eccentric 偏心3.Eccentric angle 偏心角4.Eccentricity 偏心度5.Edge radius 刀尖圆角半径6.Effective bearing spacing 轴承有效间距7.Effective face width 有效宽度〔有效齿宽〕8.Elastic coefficient 弹性系数9.Elastic deformation 弹性变形10.Elastic limit 弹性极限11.Elastohydrodynamic lubrication 弹性液压润滑12.Element 母线、要素13.End movement 轴向移动14.Endrem 修内端凸轮、导程凸轮15.Endurance life 耐久寿命16.Endurance limit 耐久极限17.Engine torque 发动机扭矩18.Enveloping 包络19.EP lubricant, EP 极压润滑剂20.EPG check, “EPG”检查21.Equal addendum teeth 等齿顶高齿22.Equicurv 等高齿大轮成形法23.Equidep 等高齿24.Equiside 等边25.Equivalent fear ratio 当量传动比26.Equivalent number of teeth 当量齿数27.Equivalent pitch radius 当量节圆半径28.Equivalent rack 当量齿条29.Expander 涨胎30.Expanding arbor 可张心轴31.Extreme pressure lubricant 极压润滑剂F.1.Face acvance 斜齿轮扭曲量2.Face angle 顶锥角〔面锥角〕3.Face angle distance 顶锥角距4.Face apex 顶锥顶5.Face apex beyond crossing point 顶锥顶至相错点距离6.Face cone 顶锥7.Face cone element 齿顶圆锥母线,面锥母线8.Face contact ratio 齿长重合度,轴向重合度〔圆柱齿轮〕9.Face line 齿面与轴面交线10.Face width 齿宽11.Factor of safety 安全系数12.Fatigue breakage 疲劳破裂13.Fatigue failure 疲劳失效14.Fatigue test 疲劳测试15.Feed cam 进给凸轮16.Feed gears 进给齿轮17.Fillet 齿根圆角18.Fillet curve 齿根过渡曲线19.Fillet radius 齿根圆角半径20.Film strength 液膜强度21.Filter (electronic) 〔电子的〕滤波器22.Filter (mechanical) 〔机械的〕滤波器23.Fine pitch 〔小模数〕细径节24.Finisher 精切机床25.Fishtail 鱼尾形26.Fixed setting 固定安装法27.Flank 下齿面28.Flanking 下齿面加工29.Formarc 加工齿轮用的曲线齿廓刀具30.Formate 成形法31.Former 齿廓样板,靠模32.Forming 成型,在磨具内挤压成型33.Form tool 成形刀34.Fourier analysis 傅里叶分析35.Frequency 频率36.Friction load 摩擦负荷37.Front angle 前角38.Front cone 前锥39.Front crown 前锥齿冠40.Front crown to crossing point 前锥齿冠至交错点41.Full-depth teeth 全齿高齿42.Fundametal 基频G.1.Gable 山形齿沟底面2.Gear 齿轮3.Gear axial displacement 齿轮轴向位移4.Gear axial plane 齿轮轴向平面5.Gear axis 齿轮轴线6.Gear center 齿轮中心7.Gear combination 齿轮组合8.Gear cone 大轮锥距9.Geared index 齿轮系分度10.Gear finisher 成形法齿轮精切机床11.Gear manufacturing summary 齿轮加工调整卡12.Gear marking compound 检查齿轮啮合涂色剂13.Gear member 大轮14.Gear planer 成型刨齿机15.Gear ratio 齿数比16.Gear rougher 齿轮粗切机床17.Gears 齿轮组18.Gear tipping 齿轮倾斜@U UlsC|3. 19.Generated gear 展成法齿轮20.Generating cam 展成凸轮21.Generating gear 展成齿轮22.Generating pressure angle 产形轮压力角23.Generating train 展成传动键24.Generation 展成25.Generator 展成齿轮加工机床26.Geneva index 星形轮分度,槽轮分度27.Geometry factor-durability 齿面接触强度几何系数28.Geometry factor0-strength 强度几何系数29.G-flow 格里森制金属件的商标,采用冷挤压成形法30.G-form 采用热锻成形法制造31.GLE-sine 砂轮内外压力角正弦波进行修整用机构32.G-plete 全工序法33.Gradeability 托曳力34.Grinding cracks 磨削裂纹35.G-spin 精密主轴的机床36.G-trac 圆柱齿轮的无端链式机床的商标H.1.Hand of cutter 刀盘方向2.Hand of spiral 螺旋方向3.Hand-rolling tester 手动滚动试验机4.Hardac 镶篇淬硬刀体精切刀盘5.Hard finishing 硬齿面精加工6.Hardness ratio factor 硬度比系数7.Harmonic 谐振8.Harmonic search 谐振追踪9.Harmonic sweep 谐振扫描10.Heel 轮齿大端11.Heel pattern 大端接触12.Helical duplex 双重螺旋法13.Helical motion 螺旋运动14.Helixact 螺旋运动法15.Helixform 螺旋成形法16.Hertz (Hz) 赫兹17.Hook angle 断面前角18.Horizontal displacement 水平位移19.Horizontal offset 水平偏置20.HRH 高减速比准双曲面齿轮〔大于10:1的减速比〕21.Hunting tooth combination 大小齿轮齿数无公因数的齿轮副22.Hudrodynamic lubrication 液压润滑23.Hupermesh 超配合24.Hypoid gears 准双曲面齿轮25.Hypoid offset 准双曲面齿轮偏置距I.1.Imaginary generating gear 假想成形法2.Incremental index 逐齿分度3.Index gears 分度齿轮4.Index interval 分度跳跃齿齿数5.Index plate 分度盘6.Index tolerance 分度公差7.Index variation 分度变化量8.Indicator anchorage 指示表支撑座9.Inertia factor 惯量系数10.Initial pitting 初期点蚀11.Inner addendum 小端齿顶高12.Inner cone distance 小端锥距13.Inner dedendum 小端齿根高14.Inner slot width 小端槽宽15.Inner spiral angle 小端螺旋角16.Inserted blade cutter 镶片刀盘17.Inside blade 内切刀齿18.Inside point diameter 内切刀尖直径19.Instantaneous contact pattern 瞬时接触斑点20.Interference 干预21.Interference point 干预点22.Interlocking disc-mill cutters 交错齿盘形铣刀23.Intermittent index 间断分度24.Internal bevel gear 内锥齿轮25.Inverse gear ratio 反齿数比26.Involute 渐开线27.Involute gear 渐开线齿轮28.Involute interference point 渐开线干预点29.Involute spiral angle 渐开线螺旋角30.Involute teeth 渐开线齿J.1.Jet lubrication 喷射润滑L.1.Lame 顶根接触2.Lapping 研磨3.Lead cam 导程凸轮4.Length of action 啮合长度5.Lengthwise bridge 纵向桥型接触6.Lengthwise mismatch 纵向失配7.Lengthwise sliding velocity 纵向滑动速度8.Life factor 寿命系数9.Lift 垂直位移10.Limit point width 极限刀顶距11.Limit pressure angle 极限压力角12.Linear displacement transducer 线性位移传感器13.Line of action 啮合线14.Line of centers 中心线15.Line of contact 接触线16.Load sharing ratio 负荷分配比17.Localized tooth contact 齿局部接触18.Locating surface 定位外表19.Long-and-short-addendum teeth 高变位齿轮20.Long-toe-short-heel 小端长,大端短接触21.Lubricant 润滑剂22.Lubrication 润滑23.Lubricity 润滑性M.1.Machine center 基床中心点2.Machine center to back 机床中心至工件安装基准面3.Machine plane 机床切削平面4.Machine root angle 毛坯安装角5.Marking compound 检查齿轮啮合型情况使用的涂色剂6.Master blade 标准刀齿7.Master gear 标准齿轮8.Mean addendum 中点齿顶高9.Mean cone distance 中点锥距10.Mean dedendum 中点齿根高11.Mean diametral pitch 中点径节12.Mean measuring addendum 中点测量齿顶高13.Mean measuring depth 中点测量齿高14.Mean measuring thickness 中点测量厚度15.Mean normal base pitch 中点法向基节16.Mean normal diameter pitch 中点法向径节17.Mean normal module 中点法向模数18.Mean point 中点,平均点19.Mean radius 中点半径20.Mean section 中点截面21.Mean slot width 中点齿槽宽22.Mean spiral angle 中点螺旋角23.Measuring addendum 测量齿顶高24.Measuring tooth thickness 测量齿厚25.Member 齿轮,元件26.Mesh point 啮合点27.Minimum slot width 最小槽宽28.Mismatch 失配29.Miter gears 等齿数整角锥齿轮副30.Mixed lubrication 混合润滑31.Modified contact ratio 修正总重合度32.Modified roll 滚修正比33.Module 模数34.Motion curves 运动曲线35.Motor torque 电机扭矩36.Mounting distance 安装距37.Mounting surface 安装面英语站N.1.Narrow-tow-wide-heel 小端窄大端宽接触2.No load 空载3.Nominal 名义4.Non-generated gear 非展成大轮5.Normal 法向,法线,法面6.Normal backlash 法向侧隙7.Normal backlash tolerance 法向侧隙公差8.Normal base pitch 法向基节9.Normal chordal addendum 法向弦齿高10.Normal chordal thickness 法向弦齿厚11.Normal circular pitch 法向周节12.Normal circular thickness 法向弧齿厚13.Normal contact ratio 法向重合度14.Normal diametral pitch 法向径节15.Normal direction 法线方向16.Normal (perpendicular) load 法向〔垂直〕负载17.Normal module 法向模数18.Normal plane 法向平面19.Normal pressure angle 法向压力角20.Normal section 法向截面21.Normal space-width taper 正常齿槽宽收缩22.Normal thickness taper 正常齿厚收缩23.Normal tilt 法向刀倾24.Normal wear 正常磨损25.No-roll roughing 无滚动粗切26.Number of teeth 齿数英语站O.1.Octoid teeth 锥齿轮的“8”字啮合2.Offset 偏置距3.Operating load 工作负荷4.Operating pressure angle 工作压力角5.Operating torque 工作扭矩6.Outer addendum 大端齿顶高7.Outer cone distance 外锥距8.Outer dedendum 大端齿根高9.Outer slot width 大端槽宽10.Outer spiral angle 大端螺旋角11.Outside blade 外切刃点12.Outside diameter 外径,大端直径14.Outside radius 齿顶圆半径15.Outside surface 外外表16.Overhung mounting 双支承安装17.Overload breakage 超负荷破裂18.Overload factor 超负荷系数英语站P.1.Path of action 啮合点轨迹2.Path of contact 接触迹3.Peak load 峰值负荷4.Peak torque 峰值扭矩5.Pedestal bearings 安装差速器壳的架座轴承6.Performance torque 性能扭矩7.Perim-mate 研磨锥齿轮和准双面齿轮用的全齿面研磨法8.Pinion 小轮9.Pinion axial displacement 小轮轴向位移10.Pinion cone 小轮锥距11.Pinion front bearing 小轮前端轴承12.Pinion head bearing 小轮后端前轴承13.Pinion rear bearing 小轮后端后轴承14.Pinion rougher 小轮粗切机15.Pinion offset 小轮偏置距16.Pitch 节距,齿距17.Pitch angle 节锥角18.Pitch apex 节锥顶19.Pitch apex beyond crossing point 节锥顶超出至相错点20.Pitch apex to back 节锥顶至安装端面21.Pitch apex to crown 节锥顶至轮冠22.Pitch circle 节圆23.Pitch cone 节锥24.Pitch curve 节面曲线25.Pitch diameter 节径26.Pitch element 节面母线27.Pitch line 节线28.Pitch-line chuck 节圆夹具u< ` da E29.Pitch-line runout 节线跳动30.Pitch plane 节面31.Pitch point 节点32.Pitch radius 节圆半径33.Pitch surfaces 节曲面34.Pitch tolerance 齿距公差35.Pitch trace 节线36.Pitch variation 齿距变化量37.Pitting 点蚀38.Plane of action 啮合平面39.Plane of rotation 旋转平面40.Planning generator 展成法刨齿机41.Plastic deformation 塑性变形42.Plastic flow 塑性流动43.Plate index 分度盘44.Point diameter 刀尖直径45.Point of contact 接触点46.Point radius 刀尖半径47.Point width 刀顶距48.Point width taper 刀顶距收缩49.Pressure lubrication 压力润滑50.Prime mover torque 原动机扭矩51.Profile angle 齿廓角52.Profile bridge 齿廓桥形接触53.Profile contact ratio 齿廓重合度54.Profile mismatch 齿廓啮合失配55.Profile radius of curvature 齿廓曲率半径56.Proof surface 检测基准面Q.1.Quality measurement system 质量检测系统2.Quenching cracks 淬火裂纹3.Quenching die 淬火压模4.Quenching press 淬火压床英语站R.1.Rack 齿条2.Radial 径向刀位3.Radial load 径向负荷4.Radial locating surface 径向定位外表5.Radial rake angle 径向前角6.Ratio control roughing 变滚比粗切7.Ratio gears 滚比挂轮8.Ratio of roll 滚比9.Ratio of roll gears 滚比挂轮10.Recess action 啮出11.Relative displacement 相对位移12.Relative movement 相对运动13.Relative radius of curvature 相对曲率半径14.Residual stress 残余应力15.Revacycle 直齿锥齿轮圆拉法用机床及刀具16.Revex 直齿锥齿轮粗拉法17.Ridg-AC 镶片圆盘端面粗铣刀18.Ridging 沟条变形19.Ring gear 大轮,环形齿轮20.Rippling 振纹21.Roll centering 滚动定心22.Roll queching 滚动式淬火压床23.Roll gears 摆角挂轮24.Rolling 滚轧25.Rolling velocity 滚动速度26.Root angle 根锥角27.Root angle tilt 齿根角倾斜28.Root apex 根锥顶29.Root apex beyond crossing point 根锥顶至相错点的距离30.Root apex to back 根锥顶至安装基准面距离31.Root circle 齿根圆32.Root cone 根锥33.Root diameter 根圆直径34.Root line 齿根线35.Root radius 根圆半径36.Root surface 齿根曲面37.Roughac 弧齿锥齿轮粗切刀38.Rougher 粗切机39.RSR 弧齿锥齿轮条形刀齿铣刀盘40.Runout 径向跳动41.Runout tolerance 径向跳动公差S.1.Scoring 胶合2.Scoring index 胶合指数3.Scuffing 胶合4.Sector 扇形齿/齿弧5.Segment 扇形齿/体6.Segmental-blade cutter 大轮精切刀7.Separation 别离间隙8.Separating factor 别离系数9.Separating force 别离力10.Set-in 补充切入,进刀11.Set-over 补充转角,调整转换12.Shaft angle 轴转角13.Shot peening 喷丸强化14.Sidebank 边频15.Side movement 侧向位移16.Side rake angle 侧前角17.Single cycle 单循环法18.Single roll 单滚动19.Single setting 单面调整法20.Single side 单面精切法21.Single-side taper 齿槽收缩22.Size factor 尺寸系数23.Skew bevel gears 斜直齿锥齿轮24.Skip index 跳齿分度25.Slide-roll ratio 单位滑滚比,比滑26.Sliding base 床鞍,滑座27.Sliding base setting 床鞍调整,滑座调整28.Sliding velocity 滑动速度29.Slip-chip 直齿锥齿轮一次成形刀30.Slip torque 滑移扭矩31.Slotting tool 切槽刀32.Slot width 槽宽33.Slot-width taper 槽宽收缩34.Small cutter development 小刀盘试切,能产生接近渐开线的刀具35.Solid cutter 整体刀盘36.Sound test 噪声试验37.Space-width taper 齿距收缩38.Spacing tolerance 齿距公差39.Spacing variation 齿距变动量40.Spalling 剥落41.Specific sliding 单位滑动比42.Speed gears 速度挂轮43.Spherical involute teeth 球面渐开线齿44.Spherica limacon teeth 球面钳线齿45.Spindle rotation angle 主轴旋转角46.Spiral angle 螺旋角47.Spiral bevel gears 弧齿锥齿轮48.Splash lubrication 飞溅润滑49.Split profile 齿型中断50.Spread blade 双面刀51.Spread blade 双面刀渐缩52.Standard depthwise taper 标准深锥度53.Standard taper 正常收缩54.Standard thickness 正常齿厚收缩55.Stock allowance 毛坯加工流量56.Straddle cutter 双列刀齿刀盘57.Straddle mounting 跨装58.Straight bevel gears 直齿锥齿轮59.Strength factor 强度系数英语站60.Stress concentration factor 应力集中系数61.Stub teeth 短齿62.Subsurface initiated fatigue breakage 金属外表斜层初始疲劳破裂63.Summary of machine settings 机床调整卡64.Sump lubrication 油槽润滑65.Sum velocity 总速度66.Surface asperities 外表粗糙度67.Surface condition factor 外表条件系数68.Surface deformation 外表变形69.Surface durability 外表耐久度70.Surface fatigue 外表疲劳71.Surface initiated fatigue breakage 外表初始疲劳破裂72.Surface of action 啮合面73.Surface of revolution 回转面74.Surface treatment 外表处理75.Swinging base 回转底座76.Swing pinion cone 摆动小轮节锥法77.Swivel 刀转78.Swivel angle 刀转角79.Symmetrical rack 对称齿条80.Symmetrical rack proportions 对称齿条比例T.1.Tangential load 切向负荷2.Tangent plane 切平面3.Tanline 小轮夹具4.Tanruf 双联粗切刀,8.5模数一下5.Tan-tru 用在加工1016-2540mm的锥齿刀具6.Taper roughing 具有刀顶距收缩的大小轮粗切过程7.Temperature factor 温度系数8.Testing machine 试验机9.Thickness taper 齿厚收缩10.Tilt 刀倾11.Tilt angle 刀倾角12.Tilted rootline taper 倾斜齿根收缩13.Tip radius 齿顶圆角半径14.Toe 轮齿小端15.Toe pattern 小端接触16.Tool 刀具17.Tool advance 刀具进刀18.Tool edge radius 刀刃圆角半径19.Tool point width 刀顶距20.Tooth angle 齿角21.Tooth bearing 齿支撑面,轮齿接触面22.Tooth contact analysis 轮齿接触分析23.Tooth contact pattern 轮齿接触斑点24.Tooth horizontal 齿水平面25.Tooth layout 轮齿剖面图26.Tooth-mesh frequency 齿啮合频率27.Tooth number 齿数28.Tooth profile 齿形,齿廓29.Tooth spacing testing 齿距检查仪30.Tooth spiral 齿螺旋线31.Tooth surface 轮齿外表32.Tooth taper 轮齿收缩33.Tooth-to-tooth composite tolerance 一齿度量中心距公差34.Tooth-to- Tooth composite variation 一齿度量中心距变量35.Tooth trace 齿线36.Tooth vertical 齿垂直面37.Top 齿顶38.Topland 齿顶面39.Topland width 齿顶面宽度40.Topping 修顶41.Top relief angle 顶刃后角42.Toprem 修根刀片43.Toprem angle 刀齿突角角度44.Top slope angle 刀齿顶刃倾角45.Total composite tolerance 总综合公差46.Total composite variation 总度量中心距变动量47.Total contact ratio 总重合度48.Total index tolerance 总分度公差49.Total index variation 总分度变动量50.Tractive effort torque 牵引力扭矩51.Transverse circular pitch 端面周节52.Transverse circular thickness 端面弧齿厚53.Transverse contact ratio 端面重合度54.Transverse diametral pitch 端面径节55.Transverse module 端面模数56.Transverse plane 端平面57.Transverse pressure angle 端面压力角58.Transverse space-width taper 端面槽宽收缩59.Transverse thickness taper 端面齿厚收缩60.Tredgold’s approximation 背锥近似法61.Tribology 润滑与磨损学62.Triplex 三面刃圆盘端铣刀63.Two-tool generator 双刀展成加工机床U.1.Undercut 根切2.Undeveloped settings 试切前调整3.Uniform roll 匀速滚动4.Uniform velocity tester 匀速试验机5.Uni-spand 大轮心轴6.Unit load 单位负荷7.Unitool 曲面镶片刀8.Up-roll 向上滚动V.1.V and H check 锥齿轮啮合的VH检查2.Variable roll 变滚动3.Velocity factor 速度系数4.Versacut 弧齿锥齿轮加工多用刀盘5.Vers-grip 卡紧小齿轮用的卡盘〔商标名称〕6.Vertical direction 垂直方向7.Vertical displacement 垂直位移8.Vertical factor 垂直系数9.Vertical force 垂直力10.Vertical offset 垂直偏置距11.Vertical plane 垂直面12.Virtual number of teeth 当量齿数13.Virtual pitch radius 当量节圆半径14.Viscosity 粘度15.V-tool V型刀具W.1.Waveform 波形2.Wear 磨损3.Webless-type gear 无幅板式齿轮4.Web-type gear 幅板式齿轮5.Wheel slip torque 车轮打滑扭矩6.Whole depth 齿全高7.Workhead 工件头座8.Workhead offset 垂直轮位9.Workholding equipment 工件夹具10.Working depth 工作齿高11.Working stress 工作允许应力12.Work tests roll 检验工件主轴转角X.1.X-pandisk 大轮蝶形,涨胎心轴Z.1.Zero depthwise taper 等齿高2.Zerol 零度锥齿轮。
海顿直线电机驱动器DCM4010
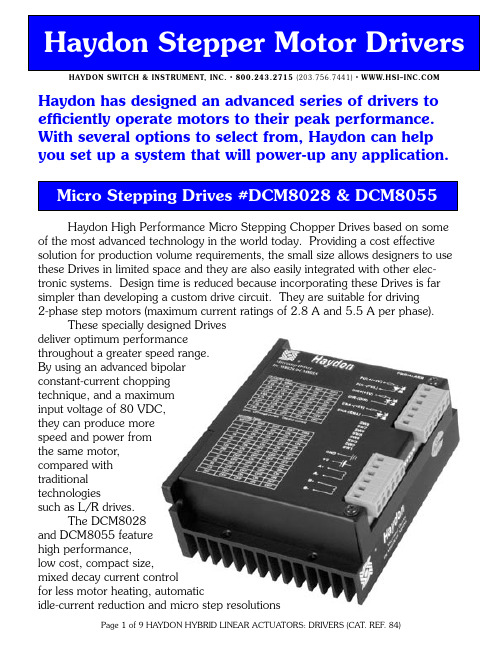
Haydon High Performance Micro Stepping Chopper Drives based on some of the most advanced technology in the world today. Providing a cost effective solution for production volume requirements, the small size allows designers to use these Drives in limited space and they are also easily integrated with other elec-tronic systems. Design time is reduced because incorporating these Drives is far simpler than developing a custom drive circuit. They are suitable for driving2-phase step motors (maximum current ratings of 2.8 A and 5.5 A per phase). These specially designed Drives deliver optimum performancethroughout a greater speed range. By using an advanced bipolar constant-current chopping technique, and a maximum input voltage of 80 VDC, they can produce more speed and power from the same motor, compared with traditional technologiessuch as L/R drives. The DCM8028and DCM8055 feature high performance,low cost, compact size, mixed decay current controlfor less motor heating, automaticidle-current reduction and micro step resolutionsHaydon has designed an advanced series of drivers to efficiently operate motors to their peak performance. With several options to select from, Haydon can helpyou set up a system that will power-up any application.HAYDON SWITCH & INSTRUMENT, INC. • 800.243.2715 (203.756.7441) • WWW.HSI–from 1/2 step to 1/256. There arefourteen micro step resolutions select-able in decimal and binary. The outputcurrent levels and micro step resolutionsare easily set via the 8 bit DIP switch.These Drives are suitable for 4, 6, and 8lead motors.Ideal for a wide range of steppingmotors such as low voltage linearmotors, used in various kinds ofmachines, such as X-Y tables, labelingmachines, laser cutters, engravingmachines, and pick-place devices.These Drives are particularly usefulin motor applications requiring lownoise, low vibration, high speed andhigh precision requirements.■ User friendly Chopper Drive■ Ideal for a wide range of stepping motors■ Suitable for 4, 6, 8 lead motors■ Inaudible 20 khz chopping frequency■ TTL compatible and optically isolated input signals■ 14 selectable microstep resolutions in decimal and binary■ Current up to 5.5 A/phase■ Automatic idle reduction■ 4 5/16” x 4” x 1 1/8” (11.0 cm x 10.2 cm x 2.9 cm)■ Up to 80 VDC input voltage. For Europe the maximuminput voltage must be limited to 70 VDC (CE Regulations)HAYDON SWITCH & INSTRUMENT, INC. • 800.243.2715 (203.756.7441) • WWW.HSI–The Haydon DCS4020 Chopper Drive delivers optimum performance throughout a greater speed range. This new technology drive has been designed for easy set up and use. The Haydon DCS4020 is ideal for development projects where a single power supply is all that is necessary to easily run the motor.The motor current is set using an on-board potentiometer and no external current setting resistors are required.The Haydon DCS4020 is alsofeature-packed. The Driver providesall the basic motor controls includingfull or half-stepping of bipolar step-pers, directional control, and outputenable control. An oscillator circuitis standard on the drive with its on-board potentiometer. In addition,external input/output signals allowcomplete remote control of all drivefunctions. All electrical connectorshave removable plugs incorporatingscrew type terminals.■ On-board or external step pulse clock ■ On-board or external single step switch■ On-board or external step rate control potentiometer ■ On-board or external direction control■ On-board or external full step / half step control ■ On-board or external outputs enable control■On-board or external current control potentiometer4.47” x 3.38” x 1.31”(113.54 mm x 85.85 mm x 33.27 mm)Single unregulated,providing +20 VDC to +40 VDC Fully adjustable from 66 mA/Ø to 2 A/Ø continuous duty 2A/Ø3A/Ø~20 Khz<10 pulses/sec. to >2,000 pulses/sec.Full step/Half step capabilitySize:Power Requirement:Output Current:Continuous rating:Peak, non-repetitive rating:Chopper Frequency:Onboard Oscillating Range:Stepping:I.C.s:S.T . Micro: L297 (control I.C.)and L298 (4A dual full wave bridge)of bipolar steppers and direction control. An oscillator circuit is standard on the drive with an on-board speed control potentiometer. In addition, external input/output signals allow complete remote control of all drive functions. Unipolar chopper drives are not generally recommended due to their lower inherent operating efficiency. The average input power rating of the motor must be adhered to, otherwise overheating will result. It is permissible to operate at 2X rated current (4X power)utilizing a 25% duty cycle.A chopper drive is a power-efficient method of current driving a stepping motor to obtain higher stepping rates. Torque, likewise, is maintained which other-wise would have diminished due to the effects of counter E.M.F. and increased coil impedance. Haydons’s bipo-lar chopper drive (Part No. 40105) has been designed for easy set-up and use. Just connect a single power supply and a motor and its ready to run! Motor current is set using an on-board potentiometer. No external current setting resistors are required. This feature-packed drive provides all basic motor controls, includ-ing full or half stepping3.75” x 2.95” x 1.5” (95.3 mm x 74.9 mm x 38.1 mm)Single unregulated, providing +24 VDC to +40 VDC Fully adjustable from 66 mA/Ø to 3 A/Ø2A/Ø3A/Ø~20 Khz<10 pulses/sec. to >2,000 pulses/sec.Full step/Half step capabilitySize:Power Requirement:Output Current: Continuous rating: Peak, non-repetitive rating:Chopper Frequency:Onboard Oscillating Range:Stepping:■■■■■■■■■■I.C.s:SGS Thomson: L297 (control I.C.)and L298(4A dual full wave bridge)On board or external step pulse clock On board or external single step switchOn board or external step rate control potentiometer On board or external direction controlOn board or external full step/half step control On board or external outputs enable control On board output current control potentiometer External “home” output External reset controlExternal chopper synchronous outputA compact, microstepping drive for can-stack stepper motors that provides a cost effective solution for production volumes. Its ease of integration and small physical size allows for quick integration into your design.The Whisper incorporatesmicro-stepping technology, a controller and runs off a single power supply. With eight microsteps per full step, the Whisper can smooth out cogging often associated with Can-Stack steppers. The drive has a mixed current decay mode for reduced resonance and improved microstepping. Microstepping also reduces audible noise in the motor. The Whisper can be used with all Hay-don linear and rotary motors from 20 mm to 46 mm diameters.Size (approx.):2.65” x 2.55” x .86”(67.31mm x 64.77mm x 21.84mm)Regulated, 24 VDC to 28 VDC power supply Up to 1 A/ØBipolar, 5 VDCUp to 8000 pps for 1000 full sps Up to 8 microsteps per full step 44103Power Requirement:Output Current:Recommended Motor Coil Voltage:Required External Step Pulse Range:Stepping:Part Number:■■■■■■Bipolar chopper/constant current technology Automatic mixed current decaySelectable step; Full, 1/2, 1/4, 1/8 step Use single power supply for motor and drive Output enable/disable control Physically compactDrivesCan-Stack Linear Dual Action# Configurations = Captive / Non-captive / External Linear Lead-screws† Standard strokes: 25.4 mm (1-in.), 50.8 mm (2-in.) and 101.6 mm (4-in.).(see Hybrid Linear Actuator Product Catalog for details)(see Can-Stack Linear Actuator Product Catalog for details)* 5V motors only. E = For Europe – the max. input voltage must be limited to 70 VDC (CE regulations).(see Hybrid orActuator ProductCatalog fordetails)Hybrid Linear (see Hybrid Linear Actuator Product Catalog for details)Double Stack Hybrid Linear Actuators (see Hybrid Linear Actuator Product Catalog for details)A Maximum force limited by bearing capabilities.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
164Produktbeschreibung CSG-2UHUnits Baureihe CSG-2UHDie Harmonic Drive AG hat die bewährten HFUC-2UH Units wei-terentwickelt. Durch die Optimierung der Flexspline- und Circular Spline Verzahnung und des Wave Generator Kugellagers konnte die Drehmomentkapazität im Vergleich zu HFUC-2UH Units um 30 % und die Lebensdauer um 40 Bei Belastung der CSG-2UH Units im Vergleich zu HFUC-2UH Units identischer Baugröße sogar mehr als dreimal höher.Leistung / Gewicht Power / WeightLeistung / Baulänge Power / Axial LengthLeistung / Durchmesser Power / Outer DiameterMassenträgheitsmoment Moment of InertiaÜbertragungsgenauigkeit Transmission AccuracyGewicht WeightAxiale Länge Axial LengthLebensdauer LifeUnitsUnits CSG-2UH UnitsOrdering CodeBaureiheSeriesBaugrößeSizeUntersetzungRatioVersionVersionSonderausführungSpecial DesignCSG 2UHUnitAccordingtocustomerrequirements 6580100120160BestellbezeichnungenCSG - 25 - 100 - 2UH - SP166Units CSG-2UHTechnische DatenTechnical DataRating TableLeistungsdatenTabelle / Table 166.1Siehe …Erläuterungen zu Technischen Daten“ im Kapitel …Projektierung mit Harmonic Drive Getrieben”.Please refer to the notes on “Understanding the Technical Data” in section “Engineering Data for Harmonic Drive Gears”.Bemerkungen:1)Ölschmierung ist optional möglich. Gegebenfalls müssen die Gehäuseab-messungen bei Ölschmierung geändert werden. Bitte Rücksprache mit der Harmonic Drive AG. 2)Gültig bei Fettschmierung mit Harmonic Drive SK-1A Fett für die Baugrößen 20 bis 65 und SK-2 für die Baugrößen 14 und 17. 3)Das angegebene Massenträgheitsmoment bezieht sich auf die Antriebsseite und gilt für einen Standard Wave Generator.Please note: 1)Oil lubrication only as option. The housing dimensions may have to be changed for oil lubrication. Please ask your Harmonic Drive partner.2)Applicable for Harmonic Drive SK-1A grease for sizes 20 to 65 or SK-2 for sizes 14 and 17. 3)The moment of inertia refers to the input side and is valid for a standard Wave Generator.167Units UnitsCSG-2UH UnitsMaßstabsgerechte CAD-Zeichnungen im 2D- oder 3D-Format stellen wirIhnen gerne auf Anfrage zur Verfügung. Sie können diese auch von unserer Homepage www.harmonicdrive.de herunterladen.The appropriate CAD drawings as 2D- or 3D-files can be provided on request. They are also available for downloading from our homepage: www.harmonicdrive.de.Abb. / Fig. 167.1 [mm]CSG-2UHDimensionsAbmessungen1)Nabe ohne Passfeder bzw. mit anderem Durchmesser siehe Kapitel …Projektie-rung mit Harmonic Drive Getrieben/Modifikationen des Wave Generators“1)Hub without feather key groove respectively with other diameter cf. chapter “Engineering data for Harmonic Drive gears/Wave Generator modifications“168Units CSG-2UHTabelle / Table 168.1[mm]für CSG Baugrößen for CSG sizes 40, 50, 65für CSG Baugrößen for CSG sizes20, 25, 32, 45, 58Wave Generator DetailsAbb. / Fig. 168.3Abb. / Fig. 168.4Abb. / Fig. 168.2169UnitsUnitsCSG-2UH UnitsGenauigkeitAccuracy DataTabelle / Table 169.1[arcmin]1)Höhere Genauigkeit auf Anfrage /Higher accuracy on requestTabelle / Table 169.2TorsionssteifigkeitTorsional StiffnessSiehe …Erläuterungen zu Technischen Daten“ im Kapitel …Projektierung mit Harmonic Drive Getrieben”.Please refer to the notes on “Understanding the Technical Data” in section “Engineering Data for Harmonic Drive Gears”.Lastfreies AnlaufdrehmomentNo-Load Starting TorqueTabelle / Table 169.3[Ncm]Lastfreies RückdrehmomentNo-Load Back Driving TorqueTabelle / Table 169.4[Nm]170Units CSG-2UHCSG-2UHAbb. / Fig. 170.1Lastfreies Laufdrehmoment• Die Diagramme in Abb. 170.1 gelten für: Harmonic Drive Schmierfett SK-1A, SK-2 Standard Schmierstoffmenge gem. Katalog Getriebe Untersetzung i = 100• Beim Einsatz anderer Untersetzungen sind die Korrekturwerte gemäß Tabelle 152.1 zu berücksichtigen.•Bei Ölschmierung bitte Rücksprache mit der Harmonic Drive AG.No-Load Running Torque• The curves in figure 170.1 are valid for: Harmonic Drive SK-1A, SK-2 grease Standard lubricant quantity Gear ratio R = 100• For other ratios please apply the compensation values given in table 152.1.•For oil lubrication please contact Harmonic Drive AG.171Units UnitsCSG-2UH UnitsEfficiencyEfficiency for Oil Lubrication at Rated Torque Mineral Oil DEA CLP 68WirkungsgradWirkungsgrad für Ölschmierung bei Nenndrehmoment Mineralöl DEA CLP 68Abb. / Fig. 171.1CSG-2UHWirkungsgrad-Berechnung siehe Kapitel …Projektierung mit Harmonic Drive Getrieben”.For efficiency calculation see section “Engineering Data for Harmonic Drive Gears”.172Units CSG-2UHEfficiency for Grease Lubrication at Rated Torque Harmonic Drive SK-1A GreaseWirkungsgrad für Fettschmierung bei Nenndrehmoment Harmonic Drive Schmierfett SK-1ACSG-2UHAbb. /Fig. 172.1Wirkungsgrad-Berechnung siehe Kapitel …Projektierung mit Harmonic Drive Getrieben”.For efficiency calculation see section “Engineering Data for Harmonic Drive Gears”.UnitsUnits CSG-2UH UnitsLeistungsdaten der AbtriebslagerungUnits der Baureihe CSG-2UH sind mit einem hoch belastbaren Kreuzrollenlager am Abtrieb ausgerüstet. Dieses speziell auf die Bedürfnisse des Harmonic Drive Getriebes hin entwickelte Lager ist in der Lage, hohe Axial- und Radialkräfte sowie hohe Kipp-momente aufzunehmen. Dadurch wird das Getriebe von äußeren Momenten frei gehalten, wodurch eine lange Lebensdauer und gleichbleibende Genauigkeiten gewährleistet werden. Für den Anwender bedeutet die Integration dieses Abtriebslagers eine bemerkenswerte Reduzierung der Konstruktions- und Fertigungs-kosten, da zusätzliche Lagerstellen entfallen können. Auch die Montage des Getriebes und der Einbau werden stark verein-facht.Falls trotz des leistungsfähigen Abtriebslagers in der Konstruktion eine zusätzliche Lagerung des anzutreibenden Maschinenele-mentes eingesetzt werden soll, ist unbedingt darauf zu achten, dass keine Verspannungen zwischen dem spielfreien Abtriebsla-ger des Getriebes und der Zusatzlagerung auftreten können. Das Getriebelager sollte möglichst als Festlager eingesetzt werden. Die Leistungsdaten des Abtriebslagers sind in Tabelle 173.1 an-gegeben.Output Bearing RatingsCSG-2UH units incorporate a high stiffness cross-roller bearing to support output loads. This specially developed bearing can withstand high axial and radial forces as well as high tilting moments. The reduction gear is thus protected from external loads, so guaranteeing a long life and constant performance. The integration of an output bearing also serves to reduce subsequent design and production costs, by removing the need for additional output bearings in many applications. Furthermore, installation and assembly of the reduction gear is greatly simplified. However, in some applications the machine element to be driven requires additional bearing support. In this case, please take care to avoid overdetermination of the bearing arrangement. The cross-roller bearing of the Unit should be used as the fixed bearing, whilst the additional support bearing should be floating, if possible.Table 173.1 lists ratings and important dimensions for the output bearings.Die Lebensdauer des Getriebes wird i.d.R. von der Lebensdauer des Wave Genera-tor Kugellagers bestimmt. Je nach Belastung kann jedoch auch das Abtriebslager für die Lebensdauer bestimmend sein.1) Diese Werte basieren nicht auf der Lebensdauergleichung des Abtriebslagers,sondern auf der max. zulässigen Verkippung des Harmonic Drive Einbausatzes.Die angegebenen Daten dürfen auch dann nicht überschritten werden, wenn die Lebensdauergleichung des Lagers höhere Werte zulässt.2) Diese Daten gelten für einen statischen Sicherheitsfaktor f s = 2. Für andere f ssiehe Kapitel …Projektierung mit Harmonic Drive Getrieben“.3) Die Daten sind unter anderem abhängig von der Verschraubung des Lager-außenrings.4) Je nach Lagerlieferant können die Teilkreisdurchmesser geringfügig von denKatalogdaten abweichen.5) siehe Abb. 457.56) C=Kreuzrollenlager1)2)3) Die Daten gelten unter folgender Voraussetzung:Für: M/M0 : F a = 0, F r = 0 | F a : M = 0, F r = 0 | F r : M = 0, F a = 0Normally, the gear life is determined by the life of the Wave Generator bearing. Depending on the specific load conditions the output bearing can also be deter-minant for the gear life.1) These values are not based on the equation for lifetime calculation of the out-put bearing but on the maximum allowable deflection of the Harmonic Drive component set. The values indicated in the table must not be exceeded even if the lifetime equation of the bearing permits higher values.2) These values are valid for a static load safety factor f s = 2. For other values off s, please refer to section “Engineering Data for Harmonic Drive Gears”.3) These data are among others dependent on the screw connections of the outerring of the bearing.4) Dependent on the bearing manufacturer the pitch circle diameter may differslightly from the data given in the catalogue.5) Cf. Fig. 457.56) C=Cross-roller bearing1)2)3)This data is only valid if the following conditions are fulfilled:For: M/M0 : F a= 0, F r= 0 | F a : M = 0, F r = 0 | F r : M = 0, F a = 0Tabelle /Table 173.1173174Technical Data and Design GuidelinesUnits CSG-2UHTechnische Daten und KonstruktionshinweiseToleranz des AbtriebslagersOutput Bearing TolerancesMontagetoleranzenDie hervorragenden Produkteigenschaften der CSG-2UH Units sind nur dann voll nutzbar, wenn bei der Montage die Tole-ranzen laut Tab. 175.1 eingehalten wer-den.Recommended Tolerances for AssemblyIn order for the new features of CSG-2UH units to be exploited fully, it is essential that the tolerances according to Tab. 175.1 are observed for the input assembly.Abb. / Fig. 174.3Tabelle / Table 174.2[mm]Empfohlene Wellentoleranz h6Recommended Shaft Tolerances h6E m p f o h l e n e G e h äu s e t o l e r a n z H 7R e c o m m e n d e d H o u s i n g T o l e r a n c e s H7Abb. / Fig. 174.1175UnitsUnitsCSG-2UH UnitsTabelle / Table 175.1[mm]Tabelle / Table 175.4( ) D ie in Klammern angegebenen Werte sind empfohlene Toleranzen füreinen Wave Generator ohne Oldham Kupplung. Diese Kupplung wird zum Ausgleich von Exzentrizitätsfehlern der Motorwelle eingesetzt und ist im Standardgetriebe eingebaut. Bei einer direkten Kupplung des Wave Generator mit der Motorwelle ohne Oldham Kupplung (Option) sollten die Motorwellentoleranzen der DIN 42955 R entsprechen.( ) T he values in brackets are the recommended tolerances for component setsfeaturing a Wave Generator without Oldham coupling. This coupling serves to compensate for eccentricity of the input shaft and is available in the stan-dard version. For the direct mounting of a Wave Generator without Oldham coupling (optional) on a motor shaft, the shaft tolerances should fulfil the DIN 42955 R standard.Montage des Gehäuses und des Abtriebsflansches Housing and Output Flange AssemblyGehäuseHousingTabelle / Table 175.3AbtriebsflanschOutput Flange* Reibungskoeffizient µ = 0,15; Schraubenqualität 12.9 * Friction coefficient µ = 0.15; 12.9 quality screwsAbtriebsflansch Output FlangeAbb. / Fig.175.2* Reibungskoeffizient µ = 0,15; Schraubenqualität 12.9 * Friction coefficient µ= 0.15; 12.9 quality screws505865888M14M16M168410011024638338336905981657950586514128M8M10M12176Motor AssemblyThe CSG-2UH Units have been designed for simple motor assembly. This means that the Wave Generator is mounted direct-ly on the motor shaft.When ordering please indicate which motor type is to be used, so that the Wave Generator can be manufactured to match. If required, CSG-2UH Units can be provided inclusive motor adaptor flange or with ready assembled motor. In addition to the correct dimensioning of the motor, particular attention must be paid to the geometric tolerances of the motor output flange and motor shaft. The shaft and flange tolerances of the motor should fulfil the requirements of the DIN 42955 standard. To fully exploit the excellent performance characteristics of the Units we recommend the use of motors fulfilling DIN 42955 R tolerances.MotoranbauDie CSG-2UH Units sind als Motoranbaugetriebe konzipiert. Dies bedeutet, dass der Wave Generator direkt auf der Motorwelle befestigt wird.Bitte geben Sie bei der Bestellung den zu adaptierenden Motor-typ an, damit der Wave Generator passend zu Ihrem Motor gefer-tigt werden kann. Auf Wunsch werden die CSG-2UH Units auch inklusive des zum Motor passenden Zwischenflansches oder mit fertig montiertem Motor geliefert. Neben der richtigen Dimen-sionierung des Motors muss besonders auf die Form- und Lage-toleranzen der Motor-Abtriebsseite und der Motorwelle geachtet werden. Die Wellen- und Flanschtoleranzen der eingesetzten Motoren sollten der DIN 42955 entsprechen. Zur optimalen Nutzung der hervorragenden Produkteigenschaften der Units empfehlen wir die Toleranz DIN 42955 R einzuhalten.HinweisWir empfehlen bei der Produktion des Zwischenflansches die Einhaltung der Abmessungen und Toleranzen gemäß Tabelle 176.2. Zur Erzielung der angegebenen Werte für Koaxialität und Planlauf sollten die motor- und getriebeseitigen Flanschflächen unbedingt in einer einzigen Aufspannung hergestellt werden.Please noteFor the manufacturing of the adaptor flange we recommend the dimensions and tolerances given in Table 176.2. To achieve the given value for concentricity and run-out we recommend that the motor and gear-side flange surfaces are manufactured at a single set-up.ZwischenflanschDie Übertragungsgenauigkeit des Harmonic Drive Getriebeshängt auch von den Toleranzen des Zwischenflansches ab. Tabelle 176.2 zeigt die empfohlenen Toleranzen des Motors bei montiertem Zwischenflansch.Adaptor FlangeThe transmission accuracy of the gearbox is dependent on the manufacturing accuracy of the motor adaptor flange. Table 176.2 shows the recommended tolerances for the motor with assembled adaptor flange.Abb. / Fig. 176.1Empfohlene Wellentoleranz k6Recommended shaft tolerance k6Tabelle / Table 176.2[mm]Units CSG-2UH455058650,050,050,050,050,050,050,050,050,0210,0210,0210,0211801902262605566124H7135H7156H7177H7177UnitsUnitsAssembly of the Wave GeneratorThe CSG-2UH Units are delivered with the Wave Generator adap-ted to the motor shaft. The hub of the Oldham coupling is securedon the motor shaft by means of a key or clamping element. Pleaseobserve the recommendations for the correct axial position of theWave Generator inside the gearbox, see Fig. 167.1.The axial attachment of the hub must withstand the axial forcesacting on the Wave Generator (see section “Engineering Datafor Harmonic Drive Gears”). When mounted correctly, the motorshaft should extend at least 2/3 of the entire hub length, therebyensuring reliable transmission of the motor torque. Verbindung der Motorwelle mit dem Wave GeneratorDie Units CSG-2UH werden mit einem an die Motorwelle ange-passten Wave Generator geliefert. Die Übertragung des Drehmo-ments kann z.B. mittels Passfeder oder Klemmelement erfolgen.Bitte achten Sie auf die Einhaltung der für den eingebautenZustand vorgeschriebenen axialen Position des Wave Generatorsim Getriebe, siehe Abb. 167.1.Die axiale Fixierung des Wave Generators muss den Axialkräftenam Wave Generator standhalten (siehe Kapitel …Projektierungmit Harmonic Drive Getrieben“). Das Wellenende des Motorsmuss sich mindestens zu 2/3 in der Nabe des Wave Generatorsbefinden, um das Drehmoment des Motors sicher übertragen zukönnen.Beim Einsatz von Schrittmotoren und bei größeren Wellendurch-messern empfehlen wir, einen Wave Generator ohne OldhamKupplung zu verwenden. Abb. 177.1 zeigt die Standardvariantemit Oldham-Kupplung und Passfeder.Abb. 177.2 zeigt einen Wave Generator ohne Oldham Kupplung(Solid Wave Generator), der mittels Spannsatz auf der Motorwellemontiert ist.For stepping motor operation and for large motor shaft diametersthe use of a Solid Wave Generator is recommended. Fig. 177.1shows the standard version with Oldham coupling and keyway.Fig. 177.2 shows a solid Wave Generator without Oldham coup-ling. The Wave Generator is attached directly to the motor shaftby means of a clamping element.CSG-2UH mit PassfederCSG-2UH with keywayCSG-2UH mit SpannelementCSG-2UH with clamping elementAbb. / Fig. 177.2Abb. / Fig. 177.1CSG-2UH Units2)3)1)178MontageBei der Montage sind zwei unterschiedliche Vorgehensweisen möglich, siehe Abb. 178.2 und 178.3. Tabelle 178.1 gibt eine Empfehlung über die Vorgehensweise bei der Montage.AssemblyAs shown in Fig. 178.2 and 178.3, there are two basic methods ofassembly. Table 178.1 provides recommendations concerning the appropriate assembly procedure.Tabelle / Table 178.1[mm]Montage des Zwischenflansches an den Motor.Attachment of the adaptor flange to the motor.Montage des Wave Generators auf die Motorwelle. Attachment of the Wave Generator to the motor shaft.Montage des Zwischenflansches inklusive Motor an die CSG-2UH Unit.Attachment of the adaptor flange and motor to the CSG-2UH Unit.Montageschritte gemäß Abb. 178.2:Assembly procedure according to Fig. 178.2:O-RingUnits CSG-2UH179Units UnitsLubricationOil LubricationHarmonic Drive Units with oil lubrication are customer- specific solutions. Lubrication and re-lubrication are defined individually.SchmierungÖlschmierungHarmonic Drive Units mit Ölschmierung sind kundenspezifische Sonderanfertigungen. Schmierung und Nachschmierung werden individuell festgelegt.Grease LubricationCSG-2UH series units are delivered with lifetime grease lubrica-tion. We recommend the use of Harmonic Drive SK-1A grease which has been specially developed for use with sizes 20 to 65. For sizes 14 and 17 we recommend the use of Harmonic Drive micro-particled SK-2 grease. When using these special greases continuous operation is permissible. However under extremeoperating conditions e.g. severe output-sidemachine vibration (e.g. in the fabric take-up of weaving machines), we recommend oil lubrication. An important consideration in grease lubrication is ensuring maximum grease retention at points where lubrica-tion is required. This can be achieved by keeping the clearance between the unit and housing as small as possible (see Fig. 179.1). Recommended clearances are shown in table 179.2. It is recommended to fill up the whole hollow space at the input side with grease (dimension a and ø b in Fig. 179.1, Table 179.2). Please note that the clearance must be larger when theWave Generator is up, in order to provide a larger grease reservoir above the Wave Generator bearing. In this case additional quan-tities of SK-1A or SK-2 grease must be ordered. The maximum operating temperature must not exceed 80 °C.FettschmierungDie Units CSG-2UH werden vollständig gefettet geliefert. Sie sind werksseitig mit einer Lebensdauerfettschmierung versehen. Für die Schmierung der Getriebe der Baugrößen 20 bis 65 emp-fehlen wir das speziell entwickelte Harmonic Drive Fett SK-1A. Fettschmierung der Baugrößen 14 und 17 sollte mit SK-2 Fett erfolgen. Bei Einsatz dieser Fette ist ein kontinuierlicher Betrieb zulässig. Bei erschwerten Einsatzbedin-gungen, z.B. Vibrationen am Abtrieb (Kettablass von Textilmaschinen), emp-fehlen wir Ölschmierung. Wichtig bei Fettschmierung ist die Sicherstellung einer ausreichenden Fettmenge an den zu schmierenden Stellen. Dies kann durch eine Optimierung des Bauraumes zwischen Getriebe und Gehäuse erreicht werden (siehe Abb.179.1).Empfohlene Gehäuseabmessungen sind in Tabelle 179.2 angegeben. Es wird empfohlen, beim Motoranbau das Fet-treservoir vollständig mit Fett zu füllen (Maß a und ø b in Abb. 179.1, Tab.179.2). Bitte berücksichtigen Sie, dass bei Einbaulage …Wave Generator oben“ der Hohlraum vergrößert wird, um ein ent-sprechend größeres Fettreservoir für das Wave Generator Lager bereitzustellen. Bitte bestellen Sie in diesem Fall eine entspre-chende zusätzliche Fettmenge des Fettes SK-1A oder SK-2. Die maximale Betriebstemperatur sollte 80 °C nicht überschreiten.Grease Re-LubricationThe units are supplied with Harmonic Drive lifetime lubricant which is a high performance grease that meets the specific requirements of the Harmonic Drive gears. It guarantees constant accuracy of the gears for the whole operating life. A re-lubrication of the Units is not necessary for typical applications.Fett-NachschmierungDas eingesetzte Harmonic Drive Hochleistungsfett ist auf die spe-ziellen Anforderungen der Harmonic Drive Getriebe abgestimmt. Es gewährleistet konstante Genauigkeit der Getriebe über die gesamte Lebensdauer. Nachschmieren der Units ist bei typischen Anwendungen nicht erforderlich.Abb. / Fig. 179.1CSG-2UH UnitsHinweis:Weitere Informationen bezüglich der Themen …Schmierstoffe und Schmierung bei erweiterten Betriebstemperaturen/Sonderschmierstoffe“ finden Sie im Kapitel …Erläuterungen zu Schmierstoffen“ auf Seite 439 und 440.Note:For further information regarding the subjects “lubricants and lubrication at exten-ded operating temperatures/special lubricants“ please refer to chapter “Lubricant Explanations“ on pages 439 and 440.a* Horizontal und Vertikal – Wave Generator unten a** Vertikal – Wave Generator oben a* horizontal and vertical – Wave Generator down a** vertical – Wave Generator upTabelle / Table 179.2[mm]180Units CSG-2UHCorrosion ProtectionKorrosionsschutzSchutz gegen Korrosion und das Eindringen von Flüssigkeiten und festen FremdkörpernProtection against Corrosion and Penetration of Liquids and DebrisMaterial:Gehäuse: Grauguss und Wälzlagerstahl.Adapterflansch, falls von der Harmonic Drive AG mitgeliefert: hochfestes Aluminium oder Stahl.Oberflächen:Schrauben schwarz phosphatiert. Gehäuseflä-chen: blank. Kreuzrollenlager: blanker Wälz-lagerstahl. Das umgebende Medium sollte keine korrosive Wirkung auf die o. g. Werk-stoffe haben.Option:Gehäuse und Abtriebslager in korrosionsge-schützter Ausführung. Bitte ggf. Rücksprache mit der Harmonic Drive AG.Das Produkt erreicht die Schutzart IP65, wenn durch die Umgebungsbedingungen (Flüssig-keiten, Gase, Taubildung) keine Korrosion an der (den) Lauffläche(n) der Radialwellendich-tung(en) hervorgerufen wird, und abtrieb-seitig ein geschlossener Abtriebsflansch angeschraubt ist. Die Flanschschrauben sind mit Schraubensicherung (z.B. Loctite 243) zu dichten. Antriebseitig ist der Adapterflansch mittels O-Ring Dichtung, zum Motorflansch ggf. mit Flächendichtung (z.B. Loctite 5203 oder Loxeal 28-10) zu dichten.Scharfkantige oder abrasiv wirkende Teile (Späne, Splitter, Staub aus Metall, Mine-ralien usw.) dürfen nicht mit Radialwellen-dichtungen in Kontakt kommen.Ein permanent auf einer Radialwellendich-tung stehender Flüssigkeitsfilm sollte verhin-dert werden.Hintergrund: Bei vollständig abgedichteter Unit entstehen infolge wechselnder Betriebs-temperaturen Druckdifferenzen in der Unit, die zum Einsaugen der auf einer Wellendich-tung stehenden Flüssigkeit führen können.Gegenmaßnahme: ggf. eine zusätzliche, kun-denseitige Wellendichtung oder Sperrluftan-schluss (konstanter Überdruck in der Unit mit getrockneter, gefilterter Luft, max. 104Pa). Ggf. bitte Rücksprache mit derHarmonic Drive AG.Materials:Housing: cast iron and bearing steel.Adapter flange, if supplied by Harmonic Drive AG: high-tensile aluminium or steel.Surfaces:Screws: black phosphatized. Housing: Bright. Cross-roller bearing: bright bearing steel. The ambient medium should not have any corro-sive effects on the above mentioned material.Option:Housing and output bearing are available in a corrosion-protected version. Please contact Harmonic Drive AG for further information.The product provides protection class IP65 under the provision that corrosion from the ambient atmosphere (condensation, liquids or gases) at the running surface of the rotary shaft seal(s) is prevented and provided that a closed output flange is connected at the output side. The flange screws must be sealed for example with Loctite 243. At the input side the adapter flange must be sealed by means of an o-ring seal. The connection of the adap-ter flange to the motor flange must be sealed for example with Loctite 5203 or Loxeal 28-10, if necessary.Contact between sharp-edged or abrasive objects (cutting chips, splinters, metallic or mineral dust etc.) and the output shaft seal must be prevented.In addition, permanent contact between the output shaft seal and a liquid covering should be prevented. Please note that the changing operating temperature of a completely sealed unit can lead to a pressure differential bet-ween the environment and the inside of the unit. This can cause liquid covering the output shaft seal to be drawn into the unit’s housing, which can lead to corrosive damage.As a countermeasure we recommend the use of an additional shaft seal (to be provided by the user) or the maintenance of a constant pressure inside the actuator by applying dry filtered air at an overpressure of not more than 104 Pa. Please contact Harmonic Drive AG for further advice.Abb. / Fig. 180.1-4UnitsUnits CSG-2UH UnitsAnwendungsbeispielApplication Examplenetengetriebe eingesetzt. Die einzelnen Greifer werden über eineKugelspindel, deren Antrieb wiederum über ein Stirnradgetriebeerfolgt, bewegt.Abb. / Fig. 181.1181。