最优化方法(共轭梯度法)
数值最优化(共轭梯度)ppt课件
极小点.
最终x(n)= u1 p1+u2 p2+···+un pn =x* 即迭代过程同样在n步之后找到最优点.
因此,对二次函数
f ( x) 1 xTGx bT x c 2
我们可以找到n个方向(向量),对其依次进行一维搜索,最
8
共轭方向法的思路
|| (s1 1 u1) p1 (s2 u2 ) p2 L (sn un ) pn ||G2
(s1 1 u1) p1 (s2 u2 ) p2 L (sn un ) pn ,
( s1
1
u1 )
p1
( s2
n
u2
)
p2
L
(sn un ) pn
(s1 1 u1)2 || p1 ||G2 (si ui )2 || pi ||G2
即p1,p2,···,pn线性无关,且 pi , pj 0(i j)
设问题的最优解x*= -G-1b在这组基底下的表示为x*= u1 p1+u2 p2+···+un pn
任取初始点x(0) =s1 p1+s2 p2+···+sn pn, 在方向p1上进行 一维搜索,即求解问题
min || (s1 1 u1) p1 (s2 u2 ) p2 L (sn un ) pn ||G2
z
x(1) O
x(3) =x* x(2) y
x(0)
x
5
共轭方向法的思路
上面的方法对一般的二次函数是否适用呢?
考虑问题
其中
G
1 2
最优化方法
随机梯度下降每次迭代只使用一个样本,迭代 一次计算量为n 2 ,当样本个数m很大的时候, 随机梯度下降迭代一次的速度要远高于批量梯 度下降方法。 两者的关系可以这样理解:随机 梯度下降方法以损失很小的一部分精确度和增 加一定数量的迭代次数为代价,换取了总体的 优化效率的提升。增加的迭代次数远远小于样 本的数量。
2. 牛顿法和拟牛顿法(Newton's method & Quasi-Newton Methods)
牛顿法(Newton's method) 牛顿法是一种在实数域和复数域上近似求解方程 的方法。方法使用函数 f ( x ) 的泰勒级数的前 面几项来寻找方程 f ( x ) = 0 的根。牛顿法最大 的特点就在于它的收敛速度很快。
具体步骤:
首先,选择一个接近函数 f ( x ) 零点的 x 0 , 计算相应的 f ( x 0 ) 和切线斜率 f ' (x 0 ) (这 里 f ' 表示函数 f 的导数)。然后我们计算穿 过点 (x 0 , f (x 0 )) 并且斜率为 f '(x 0 ) 的直线 和 x 轴的交点的 x 坐标,也就是求如下方程的 解:
批量梯度下降法(Batch Gradient Descent,BGD)
(1)将J(theta)对theta求偏导,得到每个theta对应 的的梯度:
(2)由于是要最小化风险函数,所以按每个参数 theta的梯度负方向,来更新每个theta:
(3)从上面公式可以注意到,它得到的是一个全 局最优解,但是每迭代一步,都要用到训练集 所有的数据,如果m很大,那么可想而知这种 方法的迭代速度会相当的慢。所以,这就引入 了另外一种方法——随机梯度下降。 对于批量梯度下降法,样本个数m,x为n维向 量,一次迭代需要把m个样本全部带入计算, 迭代一次计算量为m*n 2 。
最优化方法-共轭方向和共轭梯度法

由3式可以看出
2020/3/6
16
2.共轭方向-共轭方向法
• 基本定义
利用共轭方向作为搜索方向的无约束极小化算法
• 通用步骤:
(1)任取X 0 ,以及在X 0的下降方向P0 , k 0; (1)求解一维搜索问题
min f ( X k Pk ),为最优步长,是个数值.
(3) X k1 X k k Pk ;
X
T QX
bT
X
c, Q正定,
X 0是初始点,
P0
f
(X0)
X k1 X k k Pk , k 0,1...m 1, k是最优步长,且
Pk1 f ( X k1) ak Pk (这是构造的结果)
其中ak
f
( X k1)T QPk PkT QPk
,
P0
(
X
)T
k 1
Pk
)T
PkT f ( X k1)
f ( X k1) QX k1 b Q( X k k Pk ) b, ( X k 1 X k k Pk )
f ( X k1) (QX k b) kQPk f ( X k ) kQPk
当m 2时 所以,P0,P1, Pm1是线性无关的。
P0T QP1
P0T Q f ( X 1 )
f ( X 1 )T QP0 P0T QP0
P0
P0T Qf ( X 1 ) f ( X 1 )T QP0 0
表明,P0与P1共轭。
2020/3/6
2020/3/6
4
1.共轭方向法的基本原理
• 已知 X1 点是在 X 0 点在直线 l0 上沿 P0 搜索方向的一个极小 点。(l0 与 P0 是平行的)
最优化方法实验报告(2)
最优化方法实验报告Numerical Linear Algebra And ItsApplications学生所在学院:理学院学生所在班级:计算数学10-1学生姓名:甘纯指导教师:单锐教务处2013年5月实验三实验名称:无约束最优化方法的MATLAB实现实验时间: 2013年05月10日星期三实验成绩:一、实验目的:通过本次实验的学习,进一步熟悉掌握使用MATLAB软件,并能利用该软件进行无约束最优化方法的计算。
二、实验背景:(一)最速下降法1、算法原理最速下降法的搜索方向是目标函数的负梯度方向,最速下降法从目标函数的负梯度方向一直前进,直到到达目标函数的最低点。
2、算法步骤用最速下降法求无约束问题n R()min的算法步骤如下:xxf,a )给定初始点)0(x ,精度0>ε,并令k=0;b )计算搜索方向)()()(k k x f v -∇=,其中)()(k x f ∇表示函数)(x f 在点)(k x 处的梯度;c )若ε≤)(k v ,则停止计算;否则,从)(k x 出发,沿)(k v 进行一维搜索,即求k λ,使得)(min )()()(0)()(k k k k v x f v x f λλλ+=+≥; d )令1,)()()1(+=+=+k k v x x k k k k λ,转b )。
(二)牛顿法1、算法原理牛顿法是基于多元函数的泰勒展开而来的,它将)()]([-)(1)(2k k x f x f ∇∇-作为搜索方向,因此它的迭代公式可直接写出来:)()]([)(1)(2)()(k k k k x f x f x x ∇∇-=-2、算法步骤用牛顿法求无约束问题n R x x f ∈),(min 的算法步骤如下:a )给定初始点)0(x ,精度0>ε,并令k=0;b )若ε≤∇)()(k x f ,停止,极小点为)(k x ,否则转c );c )计算)()]([,)]([)(1)(2)(1)(2k k k k x f x f p x f ∇∇-=∇--令;d )令1,)()()1(+=+=+k k p x x k k k ,转b )。
共轭方向与共轭梯度法-最优化方法

f (X1)T P0 0 ,所以 f (X1)T P0 1P1TQ P0 0
P1TQ P0 0
(1)
以上就是搜索方向P1所必须满足的(必要) 条件。这也是使X2是极小点的充分条件。 P1,P2称为关于Q的共轭方向。
讨论表明 对于二维的具有正定矩阵Q的 二次函数f(X),从任一初始点出发,依次沿关 于Q共轭的两个方向进行一维搜索,必可达到 f(X)的无约束精确极小点。
Pk 1
0
且对j 0,1 , k 2, 有
PjT QPk PjT Q f ( X k ) k1Pk1
PjT Qf
(X
k
)
k
PT
1 j
QPk
1
f ( X k )T QPj
f ( X k )T f ( X j1) f ( X j ) j
f ( X k1 ) QX k1 b Q( X k k Pk ) b (2)
f ( X k1 ) f ( X k ) k QPk
所以
f ( X m ) f ( X m1) m1QPm1
f ( X m2 ) m2QPm2 m1QPm1
其中1 是最优步长,1>0 .因为 X * 是无约束极小点。
故 f ( X * ) 0 即 QX * b 0
f (X1) QX1 b
Q( X * 1P1) b (QX * b) 1QP1 1QP1
又因为 X1是f(X)沿P0方向的直线l0上的极小点,故
设 X En ,
,Q为对称正定矩阵,P0,
P1,···,Pm-1是关于Q共轭的m个共轭方向,
共轭梯度法
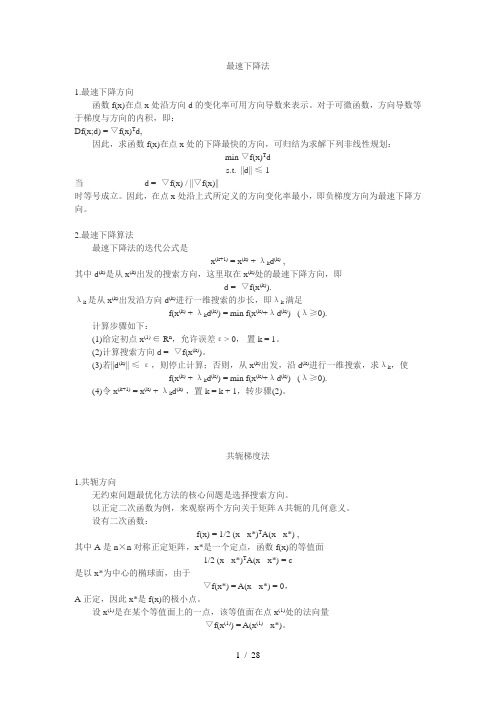
最速下降法1.最速下降方向函数f(x)在点x处沿方向d的变化率可用方向导数来表示。
对于可微函数,方向导数等于梯度与方向的内积,即:Df(x;d) = ▽f(x)T d,因此,求函数f(x)在点x处的下降最快的方向,可归结为求解下列非线性规划:min ▽f(x)T ds.t. ||d|| ≤ 1当 d = -▽f(x) / ||▽f(x)||时等号成立。
因此,在点x处沿上式所定义的方向变化率最小,即负梯度方向为最速下降方向。
2.最速下降算法最速下降法的迭代公式是x(k+1) = x(k) + λk d(k) ,其中d(k)是从x(k)出发的搜索方向,这里取在x(k)处的最速下降方向,即d = -▽f(x(k)).λk是从x(k)出发沿方向d(k)进行一维搜索的步长,即λk满足f(x(k) + λk d(k)) = min f(x(k)+λd(k)) (λ≥0).计算步骤如下:(1)给定初点x(1) ∈ R n,允许误差ε> 0,置k = 1。
(2)计算搜索方向d = -▽f(x(k))。
(3)若||d(k)|| ≤ε,则停止计算;否则,从x(k)出发,沿d(k)进行一维搜索,求λk,使f(x(k) + λk d(k)) = min f(x(k)+λd(k)) (λ≥0).(4)令x(k+1) = x(k) + λk d(k),置k = k + 1,转步骤(2)。
共轭梯度法1.共轭方向无约束问题最优化方法的核心问题是选择搜索方向。
以正定二次函数为例,来观察两个方向关于矩阵A共轭的几何意义。
设有二次函数:f(x) = 1/2 (x - x*)T A(x - x*) ,其中A是n×n对称正定矩阵,x*是一个定点,函数f(x)的等值面1/2 (x - x*)T A(x - x*) = c是以x*为中心的椭球面,由于▽f(x*) = A(x - x*) = 0,A正定,因此x*是f(x)的极小点。
共轭梯度法在优化问题中的应用

共轭梯度法在优化问题中的应用共轭梯度法是一种高效的优化算法,在许多优化问题中都得到了广泛的应用。
它是一种迭代方法,用于解决最小化二次函数的优化问题。
在本文中,我将介绍共轭梯度法的原理和算法,并探讨它在优化问题中的应用。
一、共轭梯度法的原理共轭梯度法的核心思想是通过迭代的方式,找到一个与之前迭代步骤方向相互垂直的搜索方向,以加快收敛速度。
在每一次迭代中,共轭梯度法根据当前的搜索方向更新搜索点,直到找到最优解或达到预定的收敛标准。
具体来说,共轭梯度法从一个初始搜索点开始,计算对应的梯度,并沿着负梯度方向进行搜索。
通过一定的方法找到一个与之前搜索方向相互垂直的新搜索方向,并以一定步长更新搜索点。
迭代过程将重复进行,直到满足收敛标准或达到最大迭代次数。
二、共轭梯度法的算法共轭梯度法的算法包括以下几个步骤:1. 初始化搜索点x0和梯度g0,设置迭代次数k=0。
2. 计算当前搜索方向d_k=-g_k(k为当前迭代次数)。
3. 通过一维搜索方法找到最佳步长α_k。
4. 更新搜索点x_k+1 = x_k + α_k * d_k。
5. 计算更新后的梯度g_k+1。
6. 判断是否满足收敛标准,若满足则算法停止,否则转到步骤7。
7. 计算新的搜索方向β_k+1。
8. 将迭代次数k更新为k+1,转到步骤3。
这个算法保证了每一次迭代中的搜索方向都是彼此相互垂直的,从而加快了收敛速度。
三、共轭梯度法的应用共轭梯度法在优化问题中有广泛的应用,特别是在二次规划、线性规划和非线性规划等领域。
在二次规划问题中,共轭梯度法可以高效地求解线性系统Ax=b,其中A是一个对称正定的矩阵。
由于共轭梯度法的特性,它只需要进行n 次迭代,其中n是问题的维度,就能得到精确的解。
这使得共轭梯度法在大规模线性系统求解中具有重要的应用价值。
在线性规划问题中,共轭梯度法可以用于求解带有线性约束的最小二乘问题。
共轭梯度法通过将线性约束转化为一系列的正交子空间,从而在求解最小二乘问题时能够更快地收敛。
最优化梯度法和共轭梯度法
函数的极小点。
以下分析算法的具体步骤。
(1) 任取初始点 x (1),第一个搜索方向取为 d (1) f ( x (1) ) ;
( 2) 设已求得点 x ( k 1) , f ( x ( k 1) ) 0 , g k 1 f ( x ( k 1) ) , 若 令
局部目标函数值下降最快的方向。 最速下降法是线性收敛的算法。
三. 共轭梯度法
1. 共轭方向和共轭方向法
R 定义 设 A 是 n n 的对称正定矩阵,对于 n中的两个非零向量d 1 和 d 2,
若有 d
1T
Ad 2 0 ,则称 d 1和d 2关于A共轭。
设 d 1 , d 2 ,, d k 是 Rn 中一组非零向量,如果 它们两两关于A
以任意的 x (1) R n为初始点,依次沿 d (1) , d ( 2 ) ,, d ( k ) 进行搜索,
得到点 x ( 2) , x ( 3) ,, x ( k 1) , 则 x ( k 1) 是函数 f ( x )在 x (1) Bk 上的
极小点,其中
Bk { x | x i d ( i ) , i R }
i
d ( i ) A g i 1 d
( i )T
T
Ad
(i )
g i 1T A d ( i ) d
( i )T
Ad ( i )
g i 1T A[ ( x ( i 1) x ( i ) ) / i ] d
( i )T
A [ ( x ( i 1) x ( i ) ) / i ]
共轭,即 d i Ad j 0 , i j , i , j 1 , 2 ,, k 。
最优化方法3-5共轭梯度法和共轭方向法
算法 3.5.1
设目标函数为 f (x) 1 xTGx bT x c,其中G 正定。 2
给定控制误差 。
Step1. 给定初始点 x0及初始下降方向 p0,令k 0。
Step2. 作精确一维搜索,求步长k
f
( xk
k
pk )
min
0
f
( xk
pk
)
Step3. 令 xk1 xk k pk 。
称 Fletcher-Reeves 公式,简称 FR 公式。
k 1
gkT Gpk1 pkT1Gpk 1
Gpk 1
1
k 1
(gk
g
k 1 ) ,
gkT Gpk1
1
k 1
gkT
(gk
g
k 1)
,
pkT1Gpk 1
1
k 1
(g
k1 k2
pk2 )T
(gk
g
k 1)
1
k 1
g
g T
k 1 k
1
(2)Polak-Ribiere-Polyak 公式
故
k 1
g
T k
(
gk
g
k 1)
gkT1gk 1
此式是 Polak 和 Ribiere 以及 Polyak 分别于 1969
年提出的,故称 Polak-Ribiere-Polyak 公式,简称 PRP
0,i
1,2,L
,k
(ii) xk1是二次函数在k 维超平面Hk 上的极小点。
证明 由引理 3.5.2,只需证明(i),
最优化课程练习-共轭梯度法
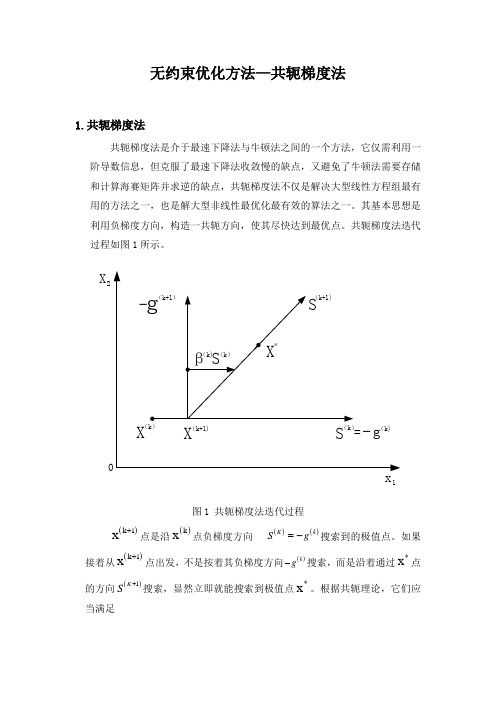
无约束优化方法—共轭梯度法1.共轭梯度法共轭梯度法是介于最速下降法与牛顿法之间的一个方法,它仅需利用一阶导数信息,但克服了最速下降法收敛慢的缺点,又避免了牛顿法需要存储和计算海赛矩阵并求逆的缺点,共轭梯度法不仅是解决大型线性方程组最有用的方法之一,也是解大型非线性最优化最有效的算法之一。
其基本思想是利用负梯度方向,构造一共轭方向,使其尽快达到最优点。
共轭梯度法迭代过程如图1所示。
1X 2图1 共轭梯度法迭代过程()k 1x +点是沿()k x 点负梯度方向()()K k Sg =-搜索到的极值点。
如果接着从()k 1x +点出发,不是按着其负梯度方向()kg -搜索,而是沿着通过*x 点的方向()1K S +搜索,显然立即就能搜索到极值点*x 。
根据共轭理论,它们应当满足()()(1)1k Tk SAS+=即()KS 与()1K S +是互为共轭方向,新构造的共轭方向()1K S +,可由矢量合成,()(1)(1)()()2k k k k SgSβ++=-+()k β值可根据在极值点附近目标函数等值线近似为二次型函数的道理,推到出:()(1)(1)(1)2()()()()2||||3||||k T k k k k T k k gg g g g g β+++==利用两个点的梯度()k g和(1)k g+,就可以构造一个与梯度矢量为共轭的矢量()1K S +,沿着该方向搜索,即可求得极值点。
共轭梯度法程序框图如图2所示。
图2 共轭梯度法程序框图2. 共轭梯度法的应用用共轭梯度法计算22121212()52410f X x x x x x x =+---+ 的最优解,其中:初始点()0[1,1]T X =。
收敛精度ε=0.0001(1).共轭梯度法程序设计#include "stdio.h" #include "math.h"double fun1(double x1,double x2) {double y;y=x1*x1+x2*x2-5*x1*x2-2*x1-4*x2+10; return y; }double fun2(double g[],double d[]) {double buchang;buchang=-(g[0]*d[0]+g[1]*d[1])/(d[0]*(2*d[0]-5*d[1])+d[1]*(-5*d[0]+2*d[1])); return buchang; }main(){ double t, beta,x1=1,x2=1,d[2],g[4], y, m,e=0.0001; int k=1;g[0]=2*x1-5*x2-2; g[1]=2*x2-5*x1-4; m=(sqrt(g[0]*g[0]+g[1]*g[1]));while(m>e&&k<=200) { if (k==1) {d[0]=-g[0]; d[1]=-g[1];beta=0; } else {beta=(g[0]*g[0]+g[1]*g[1])/(g[2]*g[2]+g[3]*g[3]); d[0]=-g[0]+beta*d[0]; d[1]=-g[1]+beta*d[1]; }t=fun2(g,d); x1=x1+d[0]*t; x2=x2+d[1]*t; g[2]=g[0]; g[3]=g[1];g[0]= 2*x1-5*x2-2;g[1]= 2*x2-5*x1-4;m=sqrt(g[0]*g[0]+g[1]*g[1]); k++; }y=fun1(x1,x2);printf("迭代次数为k=%d\n",k);printf("分别输出x1=%f,x2=%f\n",x1,x2); printf("极小值y=%f",y); }(2).程序运行结果(3).结 论用共轭梯度法计算22121212()52410f X x x x x x x =+---+的最优解为*( 1.142857,0.857143)X =-- ,*()12.857143F X = 。
最优化方法 共轭梯度法

而对于形为上述二次函数,其中G为实对称正定矩 阵,只要我们适当选取Rn的一组{p1,p2,...pn},使得pi 满足条件piTQpj=0(i≠j)
则易见在新的基下,f(x)就成为变量分离的形式。 于是,从任何一个初始点x(1)出发,分别沿每个pi方向 作线搜索,经过一轮后,肯定就能得到最优解,我们把 满足上述条件的n维方向称为是G-共轭的。
共轭梯度法
贺小燕
二、共轭梯度法 共轭梯度法是针对二次函数f(x)=(1/2)xTGx+bTx+c ,x=
(x1,x2,...,xn)T的无约束极小问题,考虑出一种搜索 方向的合理选取方法,然后形式地推广到一般的可微函 数。
首先注意到,对于变量分离的函数 f(x)=f1(x1)+f2(x2)+....+fn(xn)
Hale Waihona Puke 三、算法特点:1、全局收敛(下降算法);线性收敛;
2、每步迭代只需存储若干向量(适用于 大规模问题);
3、有二次终结性(对于正定二次函数, 至多n次迭代可达opt.)
注:对不同的β k公式,对于正定二次函 数是相等的,对非正定二次函数,有不 同的效果,经验上PRP效果较好。
定义:设G为n阶实对阵正定矩阵,若n维方 向x和y满足xTGy=0则称方向x和y是G-共轭 的。
共轭梯度法就是在每个迭代点x(k)处,以负 梯度- ▽f(x(k))和前一个搜索方向pk-1适当组合, 构成和前面k-1个搜索方向p1,p2,...pk-1均两两G共轭的搜索方向pk,故以此命名。
基于上面的考虑,现在的问题是如何构造出 两两G-共轭的方向?
最优化问题共轭梯度法法代码
最优化问题共轭梯度法法代码x本文介绍了最优化问题共轭梯度法法的代码实现,以及如何使用代码解决最优化问题。
一、共轭梯度法简介共轭梯度法是一种常用的最优化算法,它是一种经典的迭代方法,用于求解凸函数的极值问题。
其基本思想是:在每一步,沿着梯度下降的方向迭代,直到梯度为零就停止迭代。
共轭梯度法的迭代公式为:$$x_{k+1}=x_k+alpha_k p_k$$其中,$alpha_k$ 是步长参数,$p_k$ 是当前搜索方向,$x_k$ 是当前点的位置。
二、代码实现1.函数定义```python# 共轭梯度法# 入参:函数func,梯度函数grad,初始点x0,步长参数alpha,精度epsilon# 出参:求解的最优点xdef conjugate_gradient_method(func, grad, x0, alpha, epsilon):```2.初始化搜索方向```python# 初始化搜索方向p_k = -grad(x_k)```3.更新迭代点```python# 更新迭代点x_k = x_k + alpha * p_k```4.更新搜索方向```python# 更新搜索方向beta_k = (grad(x_k) * grad(x_k)) / (grad(x_k_prev) * grad(x_k_prev))p_k = -grad(x_k) + beta_k * p_k_prev```5.检查终止条件```python# 检查终止条件if np.linalg.norm(grad(x_k)) < epsilon:break```6.完整代码```python# 共轭梯度法# 入参:函数func,梯度函数grad,初始点x0,步长参数alpha,精度epsilon# 出参:求解的最优点xdef conjugate_gradient_method(func, grad, x0, alpha, epsilon):x_k = x0p_k = -grad(x_k)while np.linalg.norm(grad(x_k)) > epsilon:x_k_prev = x_kp_k_prev = p_kline_search = line_search_method(func, grad, p_k, x_k, alpha)x_k = x_k + line_search * p_kbeta_k = (grad(x_k) * grad(x_k)) / (grad(x_k_prev) * grad(x_k_prev))p_k = -grad(x_k) + beta_k * p_k_prevreturn x_k```三、如何使用代码解决最优化问题1.确定问题首先,我们需要确定最优化问题,即构造一个函数,其中包含我们想要优化的目标函数以及约束条件。
最优化方法第三章(2).

n 维向量空间中,非零的共轭向量的
个数不超过 n 。 设 p0 , p1 , , pm1 是 R n 中的非零 Q 共轭向量。因为 线性无关,所以由它们可以张成 R n 的一个 m 维子空间, 且这个 m 维子空间中的任意一个向量 x 均可表示为
x ai pi ,
i 0 m 1
3. 共轭方向法
共轭方向法的理论基础是下面的定理。 定理3.4 假设 (1)Q 为 n n 对称正定矩阵; (2) 非零向量 p0 , p1 , , pm1是 Q 共轭向量; (3)对二次目标函数(3.36)顺次进行 m 次直线搜索
xi 1 1s xi , pi , i 0,1, , m 1
p1
因为 p1 从 其中
p1 怎样确定,它应该满足什么条件?
*
x x1 t1 p1
*
x1 直指极小点 x ,所以 x
*
可以表示为
(3.38)
t1 是最优步长因子。显然,当 x1 x*时, t1 0 。
对(3.36)求导数,有
f x Qx b .
因为
(3.39)
x 是极小点,所以有
归纳一下,对于二元二次目标函数,从任意初始点 x0 出发,沿任意下降方向 p0 做直线搜索得到 x1;再从 x1 出发,沿 p0 的共轭方向 p (可由( 3.42)确定)作直线 1 * 搜索,所得到的 x2 必是极小点 x 。
一般说来,具有二次终止性的算法,在用于一般函数 时,收敛速度是较快的。
设 Q 是 n n 对称正定矩阵。若 n 维向量 空间中的非零向量 p0 , p1 , , pm1 满足 piT Qp j 0, i, j 0,1, , m 1(i j) (3.43) 则称 p0 , p1 , , pm1是 Q 共轭向量或称向量 p0 , p1 , , pm1 是 Q共轭的(简称共轭),称 p0 , p1 , , pm1 的方向是 Q 共轭 方向。 当 Q 1(单位矩阵)时,(3.43)为 定义3.3
运筹学实验报告(F-R共轭梯度法、Wolfe简约梯度法)
一、实验目的:1、掌握求解无约束最优化问题的 F-R 共轭梯度法,以及约束最优化问题 Wolfe 简约梯度法。
2、学会用MATLAB 编程求解问题,并对以上方法的计算过程和结果进行分析。
二、实验原理与步骤: 1、F-R 共轭梯度法基本步骤是在点)(k X 处选取搜索方向)(k d , 使其与前一次的搜索方向)1(-k d关于A 共轭,即(1)()(1),0k k k d d Ad --<>=然后从点)(k X 出发,沿方向)(k d 求得)(X f 的极小值点)1(+k X ,即)(m in )()()(0)1(k d X f X f k k λλ+=>+如此下去, 得到序列{)(k X }。
不难求得0,)1()(>=<-k k Ad d的解为)()1()1()()()()1(,,k k k k k k k d Ad d d AX b XX><>-<+=--+注意到)(k d 的选取不唯一,我们可取)1(1)()()(--+-∇=k k k k d X f d β由共轭的定义0,)1()(>=<-k k Add 可得: ><><-=----)1()1()1()(1,,k k k k k Ad d Ad r β共轭梯度法的计算过程如下:第一步:取初始向量)0(X , 计算⎪⎪⎩⎪⎪⎨⎧+=><><-=-=-∇==(0)0(0)(1))0()0()0()0(0(0)(0)(0)(0)d X X ,,X )X (r d λλAd d Ad r A b f第1+k 步:计算⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧+=><><-=+=><><-=-=-∇=+------(k)0(k)1)(k )()()()()1(1(k))()1()1()1()(1(k)(k)(k)d X X ,,r ,,X )X (r λλββk k k k k k k k k k k k k Ad d Ad r d d Ad d Adr A b f2、Wolfe 简约梯度法Wolfe 基本计算步骤:第一步:取初始可行点 x 0∈X l ,给定终止误差ε>0 ,令k:=0;第二步:设 I B k是x k 的 m 个最大分量的下标集,对矩阵A 进行相应分解 A =(B k ,N k );第三步:计算 ∇f(x k)=(∇B f(x k )∇Nf(x k )) ,然后计算简约梯度r N k=−(B k −1N k )T ∇B f(x k )+∇N f(x k );第四步:构造可行下降方向 p k . 若||p k ||≤ε ,停止迭代,输出x k 。
用共轭梯度法解决最优化问题

共轭梯度法迭代计算步骤如下 :
⑴令迭代步数 k = 0 ,设定允许误差ε和初始点 x ( k) .
⑵计算函数 f ( x) 在 x ( k) 处的梯度向量 g( k) = f ( x ( k) ) ,检验是否满足 ‖g ( k) ‖ ≤ε ,若满足则所得 x ( k) 即为近似
最优解 x 3 ;否则 ,令 d ( k) = - g ( k) .
( d ( k) ) TA d ( k +1) = - ( d ( k) ) TA g ( k +1) + βk ( d ( k) ) TA d ( k) = 0
(9)
从而
βk
=
( d ( k) ) TA g ( k +1) ( d ( k) ) TA d ( k)
(10)
为了避免计算 Hessian 矩阵 A 的麻烦 ,现设法消去上式中的 A ,将一维搜索迭代式 :
f ( x ( k +1) ) = f ( x ( k) ) + λkA d ( k) 或 g ( k +1) - g ( k) = λkA d ( k) ,
(13)
将 (13) 式代入 (10) 式中 ,有 :
βk =
f ( x ( k+1) ) T [ f ( x ( k+1) ) ( d ( k) ) T [ f ( x ( k +1) ) -
.
(14)
对于非二次函数 , βk
=
‖g ( k +1) ) ‖2 ‖g ( k) )
( g( k +1) ) ‖2
T gk .
(15)
按 (8) 式和 (14) 、(15) 式确定搜索方向 d ( k+1) 的计算方法称为共轭梯度法. 对于一般的目标函数 , 该方法公式结构简
共轭梯度最优化方法

共轭梯度最优化方法
共轭梯度法呢,它主要是用来解决最优化问题的。
想象一下,你在一个超级复杂的迷宫里找宝藏,这个宝藏就是那个最优解。
普通的方法可能就像没头苍蝇乱撞,但是共轭梯度法就像是有个小机灵鬼在给你指路。
它有个很厉害的地方,就是利用了之前搜索的信息。
就好比你前面走过的路不是白走的,它会根据之前的经验来决定下一步往哪走。
比如说,你第一次往左边走了一段,发现不太对,那这个方法就会把这个信息记下来,下一次就不会再傻乎乎地一直往左边走啦。
在数学上呢,它是基于一些向量之间的特殊关系,也就是共轭关系。
这就像是一群小伙伴,他们之间有着某种默契,互相配合来找到那个最优解。
共轭梯度法的优点可不少呢。
它比一些传统的最优化方法要快很多。
就像跑步比赛,别人还在慢悠悠地起步,它已经像小火箭一样冲出去了。
而且,它不需要太多的存储空间,就像一个很会整理东西的小能手,不会把空间弄得乱七八糟。
不过呢,它也不是完美无缺的。
有时候在一些特别复杂的情况下,它可能也会有点小迷糊。
但是总体来说,在很多领域都超级有用。
还有在机器学习里,要调整那些复杂的模型参数,让模型预测得更准。
共轭梯度法也能来帮忙,它就像一个小导师,告诉那些参数应该怎么调整才能让整个模型变得更优秀。