自动控制原理课程设计报告书
自动控制原理课程设计报告(自控)

自动控制系统课程设计课题名称单位负反馈系统的校正设计学院(系)信息工程与自动化专业班级 08自动化姓名杨宝贵学号 *********指导老师乔永凤设计日期 2010.12.20目录一、设计目的------------------------- 3二、设计任务与要求--------------------- 32.1设计任务 ------------------------- 32.2设计要求 ------------------------- 3三、设计方法步骤及设计校正构图----------- 33.1校正前系统分析--------------------- 3 3.2校正方法 ------------------------- 6 3.3校正装置 ------------------------- 73.4校正后系统分析--------------------- 9四、课程设计小结与体会----------------- 12五、参考文献------------------------- 13一 、设计目的1. 掌握控制系统的设计与校正方法、步骤。
2. 掌握对系统相角裕度、稳态误差和穿越频率以及动态特性分析。
3. 掌握利用MATLAB 对控制理论内容进行分析和研究的技能。
4. 提高分析问题解决问题的能力。
二、设计任务与要求2.1设计任务设单位负反馈系统的开环传递函数为:))101.0)(1(/()(++=s s s K s G用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态 性能:1) 相角裕度045≥γ;2) 在单位斜坡输入下的稳态误差为0625.0≥ss e ; 3) 系统的穿越频率大于2rad/s 。
2.2设计要求1) 分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正; 2) 详细设计(包括的图形有:校正结构图,校正前系统的Bode 图,校正装置的Bode图,校正后系统的Bode 图;3) 用MA TLAB 编程代码及运行结果(包括图形、运算结果; 4) 校正前后系统的单位阶跃响应图。
昆明学院自动控制原理课程设计报告
自动控制原理课程设计报告课程名称:自动控制原理设计题目:自动控制原理MATLAB仿真院系:自动控制与机械工程学院班级:2013级电气工程及其自动化3班姓名:烤火卡学号:指导教师:李云娟自动控制原理课程设计报告一.实验目的和意义:1.了解matlab 软件的基本特点和功能,熟悉其界面,菜单和工具条;掌握线性系统模型的计算机表示方法,变换以及模型间的相互转换。
了解控制系统工具箱的组成,特点及应用;掌握求线性定常连续系统输出响应的方法,运用连续系统时域响应函数(impulse,step,lsim),得到系统的时域响应曲线。
2.掌握使用MATLAB软件作出系统根轨迹;利用根轨迹图对控制系统进行分析;掌握使用MATLAB软件作出开环系统的波特图,奈奎斯图;观察控制系统的开环频率特性,对控制系统的开环频率特性进行分析。
3.掌握MATLAB软件中simulink工具箱的使用;熟悉simulink中的功能模块,学会使用simulink对系统进行建模;掌握simulink的方真方法。
二.实验原理(1)MATLAB语言的特点及其主要功能:MATLAB是矩阵实验室(Matrix Laboratory)的简称,是美MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分它将数值分析,矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平MATLAB和Mathematica、Maple并称为三大数学软它在数学类科技应用软件中在数值计算方面首屈一指。
MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连 matlab开发工作界面接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图中处理、信号检测、金融建模设计与分析等领域。
自动控制原理专业课程设计方案报告

自控课程设计 课程设计(论文)设计(论文)题目 单位反馈系统中传输函数研究学院名称 Z Z Z Z 学院 专业名称 Z Z Z Z Z学生姓名 Z Z Z 学生学号 Z Z Z Z Z Z Z Z Z Z 任课老师 Z Z Z Z Z设计(论文)成绩单位反馈系统中传输函数研究一、设计题目设单位反馈系统被控对象传输函数为 )2)(1()(00++=s s s K s G (ksm7)1、画出未校正系统根轨迹图,分析系统是否稳定。
2、对系统进行串联校正,要求校正后系统满足指标: (1)在单位斜坡信号输入下,系统速度误差系数=10。
(2)相角稳定裕度γ>45º , 幅值稳定裕度H>12。
(3)系统对阶跃响应超调量Mp <25%,系统调整时间Ts<15s3、分别画出校正前,校正后和校正装置幅频特征图。
4、给出校正装置传输函数。
计算校正后系统截止频率Wc和穿频率Wx。
5、分别画出系统校正前、后开环系统奈奎斯特图,并进行分析。
6、在SIMULINK中建立系统仿真模型,在前向通道中分别接入饱和非线性步骤和回环非线性步骤,观察分析非线性步骤对系统性能影响。
7、应用所学知识分析校正器对系统性能影响(自由发挥)。
二、设计方法1、未校正系统根轨迹图分析根轨迹简称根迹,它是开环系统某一参数从0变为无穷时,闭环系统特征方程式根在s平面上改变轨迹。
1)、确定根轨迹起点和终点。
根轨迹起于开环极点,最终开环零点;本题中无零点,极点为:0、-1、-2 。
故起于0、-1、-2,最终无穷处。
2)、确定分支数。
根轨迹分支数和开环有限零点数m和有限极点数n中大者相等,连续而且对称于实轴;本题中分支数为3条。
3)、确定根轨迹渐近线。
渐近线和实轴夹角为φa,交点为:σa。
且:φa=(2k+1)πn−m k=0,1,2······n-m-1; σa=∈pi−∈zin−m;则:φa=π3、3π3、5π3;σa=0−1−23=−1。
《自动控制原理》课程设计报告书
信息科学与工程学院课程设计报告书课程名称:自动控制原理课程设计班级:自动化2010级3班学号:姓名:指导教师:2013年1月一.需求分析1.设计题目已知单位负反馈系统被控制对象的开环传递函数)11.0(s G 0+=s s K)(用串联校正的频率域方法对系统进行串联校正设计。
2.设计要求及系统功能分析任务一:用串联校正的频率域方法对系统进行串联校正设计,使闭环系统同时满足如下动态及静态性能指标:(1)在单位斜坡信号t t r =)(作用下,系统的稳态误差005.0≤ss e ; (2)系统校正后,相位裕量045>γ (3)系统校正后,幅值穿越频率50c2>ω任务二:若采用数字控制器来实现任务一设计的控制器,给出数字控制器的差分方程表示或离散传递函数(Z 变换)表示。
仿真验证采用数字控制器后闭环系统的性能,试通过仿真确定满足任务一指标的最大的采样周期T. (注:T 结果不唯一)。
二.校正前系统性能分析校正前系统的开环传递函数为 )11.0()(0+=s s Ks G由设计要求(1)005.0≤ss e ,得K e ss 1=,故有200K ≥从而系统的开环传递函数为ss s G 102000)(20+=系统的闭环传递函数为2000102000)(20++=Φs s s系统的闭环单位斜坡响应的拉氏变换为)(12000s 102000120001020001)()(R s C '0232200s ss s s s s s s s Φ∙=++∙=++∙=Φ=)(即对)(s Φ的斜坡响应对应于对)('s Φ的阶跃响应。
系统的时域性能(程序参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page102)%%系统未校正前闭环单位斜坡响应num=[2000];den=[1,10,2000,0]; t=[0:0.1:20];y=step(num,den,t); plot(t,t,t,y); grid;xlabel('time');ylabel('input and output'); title('校正前系统的斜坡响应');系统的频域性能(程序参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page208)%%系统未校正前伯德图 num=[200];den=[0.1 1 0];sys=tf(num,den);w=logspace(-1,4,100) bode(h,w); grid;[Gm,pm,wcp,wcg]=margin(sys); Gmdb=20*log10(Gm); [Gmdb,pm,wcp,wcg]得到系统的稳态裕度:增益裕度gm 、相位裕度pm 、相角穿越频率wcg 、幅值穿越频率wcp由结果知:相位裕度000457580.12<=γ幅值穿越频率s rad s rad 501649.441c <=ω不符合系统的性能指标要求,因此需要进行校正,根据题目要求,采用串联超前校正。
自动控制原理课程设计报告-北京科技大学
北京科技大学自动控制原理课程设计学院:班级:学号:指导教师:姓名:目录一.引言 (3)二.系统模型的建立 (3)三.系统控制的优化 (3)3.1 PID调节参数的优化 (3)3.2 积分分离PID的应用 (3)四,结语 (3)双轮自平衡智能车行走伺服控制算法摘要:全国第八届“飞思卡尔”智能汽车大赛已经结束。
光电组使用大赛提供的D车模,双轮站立前进,相对于以前的四轮车,双轮车的控制复杂度大大增加。
行走过程中会遇到各种干扰,经过多次的实验,已经找到了一套能够控制双轮车的方法。
双轮机器人已经广泛用于城市作战,排爆,反恐,消防以及空间消防等领域。
实验使用单片机控制双电机的转速,达到了预期的效果。
关键词:自平衡;智能;控制算法Motion Servo Control Algorithm forDual Wheel Intelligent CarAbstract: The 8th freescale cup national Intelligent Car competition of has been end.The led team must used D car which has only 2tires.It is more difficult to control prefer to control A car which has 4tires.There is much interference on the track. A two-wheeled robots have been widely used in urban warfare, eod, counter-terrorism, fire control and space fire control and other fields。
We has searched a good ways to control it.We used MCU to control the speed of motors and get our gates.Key Words: balance by self; intelligent; control algorithm一.引言双轮自平衡车是智能汽车中一个重要的组成部分。
武汉科技大学自动控制原理课程设计【范本模板】
信息科学与工程学院课程设计报告书课程名称: 自动控制原理课程设计班级:自动化学号:姓名:指导教师:陈琳二○一三年十二月一、设计目的1.掌握控制系统的设计与校正方法、步骤。
2.掌握对系统相角裕度、稳态误差和剪切频率以及动态特性分析。
3。
掌握利用MATLAB对控制理论内容进行分析和研究的技能。
4。
提高分析问题解决问题的能力。
二、设计任务与要求2。
1设计任务2)在MATLAB 中编写如下程序: h1=tf([30],[1 0]); h2=tf ([1],[0.1 1]); h3=tf ([1],[0.2 1]); h=h1*h2*h3;[num,den]=tfdata (h);[mag,phase ,w]=bode(num ,den ); subplot(211);semilogx(w ,20*log10(mag ));grid subplot(212);semilogx (w ,phase );grid[gm ,pm,wcg ,wcp ]=margin (mag ,phase ,w)未校正前bode 图:由图知,相位裕度为 -17.2054°,截止频率为 9。
7680 rad/s 。
因为系统不稳定,不宜采用相位超前校正,故采用滞后校正。
(2)详细设计1)根据系统相位裕度大于45度的要求,串联校正后相角裕度应为:0002702545=+=+=εγγ又因为:()02200270)2.0arctan(1.0arctan 90180=---=c c ωωγ即:222002.013.0arctan =⎪⎪⎭⎫ ⎝⎛-c c ωω则可解的:1217.1-=s c ω当117.1-==s c ωω时,令未校正系统的开环增益为βlg 20,从而求出串联滞后校正装置的系数β,由于未校正系统的增益在11-=s ω时为30lg 20,故有2017.1lg 0lg 2030lg 20-=--β解的: 64.25=β选定: 1239.01-===s c ωτω 则: )11015.01-==s βτω于是,滞后网络的传递函数为:()()()39.064.2539.0++=s s s G c校正后系统开环传递函数为:()()()()()174.6512.011.0156.230++++=s s s s s s G 2)对于频率为11.0-=s ω,幅值为3的正弦输入信号稳态误差的检验: 因为系统的稳态误差传递函数为: ()()()s R s E =Φs er 所以有: ()()()()s G s s G c 0er G 1111s +=+=Φ 其频率特性为:()()()()()()()()39.03039.064.2512.011.039.064.2512.011.0++++++++=Φωωωωωωωωωj j j j j j j j j s er把1s 1.0-=ω带入()()()()()()()()39.03039.064.2510.2j 11.0j 39.064.2510.2j 11.0j j er ++++++++=Φωωωωωωωωωωj j j j j 得: ()0219.0j er =Φω又因为输入信号的振幅为3,所以稳态误差的振幅为()j 1.03er Φ,所以稳态误差的振幅为0。
自动控制原理课程设计报告
1、 设计内容开环传递函数:()(0.011)(1)KG s s s s =++,对传递函数进行分析,包括时域、频域、根轨迹分析。
要求校正后系统的性能指标为: 45γ>°,05.0<ss e2、 设计要求分析函数,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正;),详细设计(包括的图形有:校正前系统的Bode 图,校正后系统的Bode 图;),用MATLAB 编程代码及运行结果(包括图形、运算结果;),校正前后系统的单位阶跃响应图。
3、 校正前系统分析3.1时域指标的计算与MATLAB 分析3.1.1由05.0<ss e 得出,系统型别v=1,K=20。
3.1.2将开环传递函数求出闭环传递函数:系统为为单位负反馈系统,得出:自然振荡频率 ωn =4.47 rad/s ,阻尼角β=4.17º,阻尼比 ξ=0.11,衰减系数 б=0.49,振荡频率 ωd =4.423.1.3时域性能指标:由公式得 超调量 σ%=49%,峰值时间 t p=π/ωd =0.70S调节时间t s=9.81S(Δ=0.02)上升时间t r=π-β/ ωd=0.25S3.1.4MATLAB分析:输入为单位阶跃响应, MATLAB程序参看附录;MATLAB图如下:图3-1 单位阶跃响应及其动态性能指标3.1.5动态性能指标:超调量:σ%=75% ,调节时间:t s=9.34S (Δ=0.02)上升时间:t r=0.251S (取由稳态值的10%到90%),峰值时间:t p=0.703s3.1.6MATLAB分析得出:通常由上升时间或峰值时间来评价系统的响应速度;用超调量来评价系统的阻尼程度;而调节时间是同时反映响应速度和阻尼程度的综合性能指标。
系统的单位阶跃响应曲线为衰减振荡曲线,最后趋于稳定。
2图3-1 单位阶跃响应及其动态性能指标图3-2 稳态值的10%到90%3.2根轨迹稳定分析3.2.1根轨迹分析:由开环传递函数得出有三个极点,分别为:s=-100,-1,0 极点数N=3,零点数M=0S=-100为非主导极点(舍去),s=-1和s=0为主导极点,无零点。
自动控制原理课程设计报告_3

自动控制原理课程设计专业:自动化班级:姓名:学号:指导教师:自动化与电气工程学院2013 年 01月 11日目录1、设计目的 (2)2、设计内容 (2)3、设计过程和步骤 (2)4、软件仿真 (6)5、电路模拟以及结果分析 (7)6、思考题 (9)7、设计小结 (10)8、参考文献 (10)连续定常系统的频率法超前校正1.设计目的(1)了解串联超前校正环节对系统稳定性及过渡过程的影响;(2)掌握用频率特性法分析自动控制系统动态特性的方法;(3)掌握串联超前校正装置的设计方法和参数调试技术;(4)掌握设计给定系统超前校正环节的方法,并用仿真技术验证校正环节理论设计的正确性;(5)掌握设计给定系统超前校正环节的方法,并模拟实验验证校正环节理论设计的正确性。
2.设计内容已知单位反馈控制系统的开环传递函数为:G0(s)=Ks(0.2s+1)(0.01s+1)设计超前校正装置,使校正后系统满足:K v=100s−1, ωc≥30s−1,σ%≤36% 3.设计过程和步骤3.1 确定开环增益K根据给定静态误差系数的要求,确定开环增益KK v=lims→0sG0(s)=lims→0sKs(0.2s+1)(0.01s+1)=100s−1得K=100。
3.2画出未校正系统的伯德图未校正系统的开环函数:G0(s)=100s(0.2s+1)(0.01s+1)=50000s(s+5)(s+100)MATLAB中输入以下语句:>> Go=zpk([],[0 -5 -100],50000);>> bode(Go)>> margin(Go)得到未校正系统的Bode图,如图1所示,并由图可知未校正系统的相角余P m=γ1= 0.596deg ,剪切频率ωc=21.8s−1。
图1未校正系统的Bode图3.3 确定最大超前相角由题目要求可知,校正后的系统的超调量σ%≤36%,高阶系统有以下公式,超调量:σ%=0.16+0.4(Mγ−1)谐振峰值:Mγ=1 sinγ由以上公式可得,当σ%=36%时,γ=41.8°,由于系统的开环对数幅频特性在剪切频率处的斜率为−40db/dec,一般取ε=5~10。
自动控制原理课程设计报告
成绩摘要本设计通过对开环传递函数的串联滞后校正,改善了系统的各项性能指标,使校正后的剪切频率和相角裕度满足题目所给要求,并通过MATLAB编程给出了校正前和校正后的Bode图,Nyquist曲线,以及各个频域响应曲线。
运用Nyquist 稳定判据和对数频率稳定判据成功判出校正前和校正后系统的稳定性。
关键字:滞后,Bode图,稳定性,校正目录设计题目 (4)一.概述 (4)1.1设计题目 (4)1.2 设计目的 (4)1.3 设计要求 (4)二.串联滞后校正的设计 (4)2.1校正前的性能指标 (4)2.2设计滞后校正 (5)2.3校验 (6)三.判断系统稳定性 (7)3.1利用MATLAB求校正前与校正后的特征根 (7)3.2校正前与校正后的动态性能 (7)3.绘制根轨迹 (13)3.4绘制Nyquist曲线并判断稳定性 (15)3.5根据Bode图判断系统稳定性 (16)3.6绘制校正前后幅相特性曲线 (16)课程设计体会 (18)参考文献 (18)一、概述:1.1设计条件:已知单位负反馈系统的开环传递函数0()(0.11)(0.21)K G S S S S =++试用频率法设计串联滞后校正装置,使(1)校正后系统的静态误差系数25V K = (2)相位裕度045γ≥, (3)截止频率为2.5rad s 。
2.2设计目的a. 了解控制系统设计的一般方法、步骤。
b. 掌握对系统进行稳定性分析、稳态误差分析以及动态特性分析的方法。
c. 掌握利用MATLAB 对控制理论内容进行分析和研究的技能。
d. 提高分析问题解决问题的能力。
3.3设计要求(1)、能用MATLAB 解复杂的自动控制理论题目。
(2)、能用MATLAB 设计控制系统以满足具体的性能指标。
(3)、能灵活应用MATLAB 的CONTROL SYSTEM 工具箱和SIMULINK 仿真软件,分析系统的性能二、串联滞后校正的设计本设计使用串联滞后校正来改善系统的各项性能指标。
自动控制原理课程设计实验报告
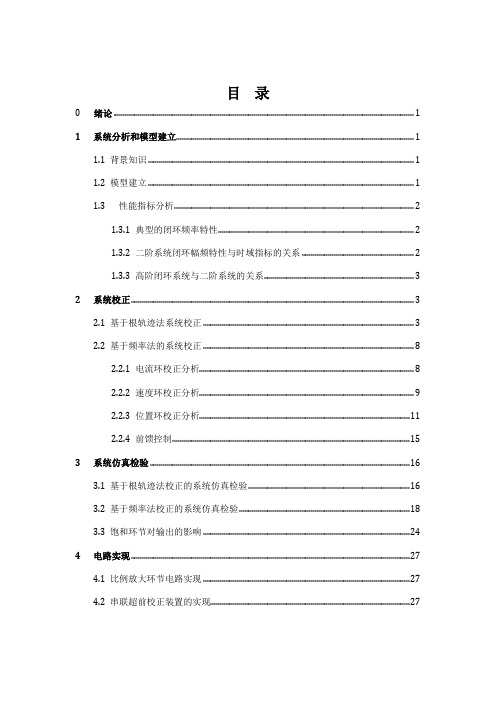
目录0 绪论 (1)1系统分析和模型建立 (1)1.1 背景知识 (1)1.2 模型建立 (1)1.3性能指标分析 (2)1.3.1 典型的闭环频率特性 (2)1.3.2 二阶系统闭环幅频特性与时域指标的关系 (2)1.3.3 高阶闭环系统与二阶系统的关系 (3)2系统校正 (3)2.1 基于根轨迹法系统校正 (3)2.2 基于频率法的系统校正 (8)2.2.1 电流环校正分析 (8)2.2.2 速度环校正分析 (9)2.2.3 位置环校正分析 (11)2.2.4 前馈控制 (15)3系统仿真检验 (16)3.1 基于根轨迹法校正的系统仿真检验 (16)3.2 基于频率法校正的系统仿真检验 (18)3.3 饱和环节对输出的影响 (24)4电路实现 (27)4.1 比例放大环节电路实现 (27)4.2 串联超前校正装置的实现 (27)4.3 前馈校正装置的实现 (29)5总结 (31)5.1 设计总结 (31)5.2 心得体会 (31)0绪论直流电动机以其良好的控制特性得到了广泛的应用。
本次设计正是以直流电机为模型,基于控制系统常用的性能指标,提出合理的设计方案。
本次设计是对前边所学课程的综合应用,也是与工程实践相结合的一个良好范本。
本次设计,旨在加深对自动控制原理和元件等知识的深入理解,也为后继课程的学习奠定基础。
1系统分析和模型建立1.1背景知识标准直流电机控制系统的基本方框图如图1-1所示。
图1- 11.2模型建立根据题给条件,对参数进行求取。
其中转动惯量又由力矩系数,知反电势系数。
,,求得,。
则电机的模型如图1-2所示。
1图1- 21.3性能指标分析1.3.1典型的闭环频率特性对于典型的单位反馈闭环系统,闭环幅频特性具有以下特点:(1)若开环传递函数含有串联积分环节,则闭环幅频特性在处。
否则(2)在低频段,闭环幅频特性变化缓慢,比较平滑。
(3)随着增大,闭环幅频特性会出现谐振峰,谐振峰对应的角频率成为谐振频率。
自动控制原理课程设计报告书
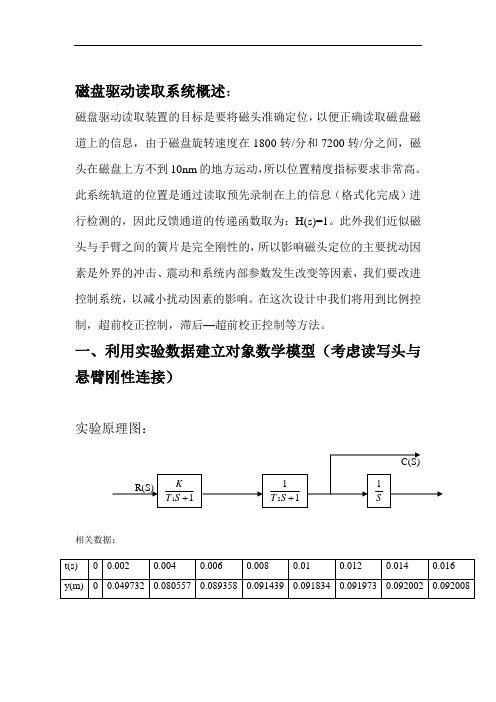
磁盘驱动读取系统概述:磁盘驱动读取装置的目标是要将磁头准确定位,以便正确读取磁盘磁道上的信息,由于磁盘旋转速度在1800转/分和7200转/分之间,磁头在磁盘上方不到10nm的地方运动,所以位置精度指标要求非常高。
此系统轨道的位置是通过读取预先录制在上的信息(格式化完成)进行检测的,因此反馈通道的传递函数取为:H(s)=1。
此外我们近似磁头与手臂之间的簧片是完全刚性的,所以影响磁头定位的主要扰动因素是外界的冲击、震动和系统内部参数发生改变等因素,我们要改进控制系统,以减小扰动因素的影响。
在这次设计中我们将用到比例控制,超前校正控制,滞后—超前校正控制等方法。
一、利用实验数据建立对象数学模型(考虑读写头与悬臂刚性连接)实验原理图:相关数据:飞升曲线标幺曲线根据程序:t=t(15:30);y1=y(15:30);y2=y1/0.092008;y3=1-y2;y4=log(y3);plot(t,y4)gridp=polyfit(t,y4,1)并得到:p =-829.6900 1.5860所以:K=-829.69,b=1.586 得到斜率坐标曲线如下图:斜率坐标图计算如下:所以对象传递函数:G(s)=0.92008/(1.156×10-6S3+2.16×10-3S2+S)二、采用比例控制,系统的性能指标要求:超调量%<5%,调整时间t s <200ms ,单位扰动的最大响应小于5‰1、控制系统方块图:R(S) C(S2、根据根轨迹程序:a=[0.92008];b=[1.156e-006 0.00216 1 0]; sys=tf(a,b); rlocus(sys); gridrlocfind(sys)>> Select a point in the graphics window selected_point =-7.4426e+002 -8.3668e+000ians =26.5803得到如图根轨迹:Ka 0.92008/(0.00121S+1)1/(0.000958S+1)1/s 1根轨迹图在保证系统稳定的前提下,折中选出比例增益,系统稳定要求闭环系统的极点位于S平面的右半面,通过根轨迹图可知当%=4.88%时,系统Ka=2473、系统的稳定裕度编程:ka=247;sys1=tf([0.92008*ka],[ 0.00121 1])sys2=tf([1],[0.000958 1 0])sys3=series(sys1,sys2);bode(sys3)gridmargin(sys3)[h r wg wc]=margin(sys3)运行结果:Transfer function:227.3-------------0.00121 s + 1Transfer function:1----------------0.000958 s^2 + sh =8.2297 (幅值欲量h)r =63.7349 (相角欲量r)wg =928.8050 (交接频率w g)wc =215.3773 (截止频率w c)BODE图4、单位阶跃给定作用下的响应曲线编程:ka=247;t=0:0.0001:10;sys1=tf([0.92008*ka],[ 0.00121 1])sys2=tf([1],[0.000958 1 0])sys3=series(sys1,sys2);sys4=feedback(sys3,[1])[y,t]=step(sys4,t);plot(t,y)grid得到曲线如图:5、单位扰动作用下的响应曲线编程:ka=247;t=0:0.001:2;sys1=tf( 1,[0.000958 1 0])sys2=tf(0.92008*ka,[0.00121 1])sys3=feedback(sys1,sys2)[y,t]=step(sys3,t);plot(t,y)grid得到曲线如图:5、小结通过多次改变Ka的可得到以下表中的多组数据:Ka 225 235 247 255 265超调量 3.14% 3.95% 4.88% 5.57% 6.4%调节时间(s)0.014 0.013 0.012 0.012 0.0130.0049 0.0048 0.0046 0.0045 0.0044对单位阶跃扰动的响应的最大值由此折中选择Ka=247为合适的。
自动控制原理课程设计报告
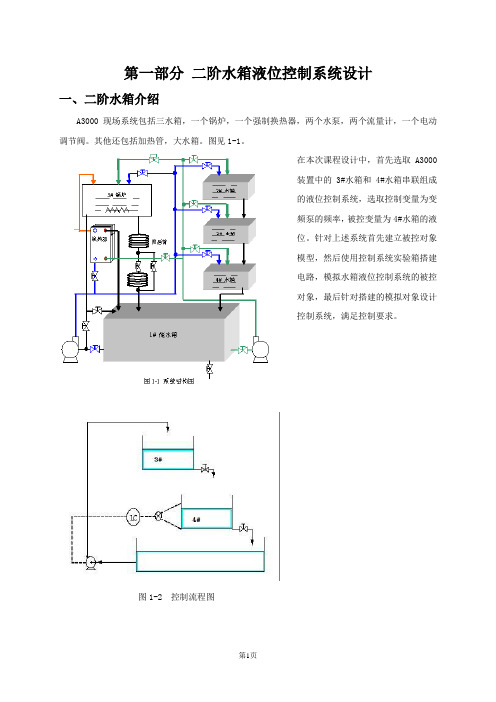
第一部分二阶水箱液位控制系统设计一、二阶水箱介绍A3000现场系统包括三水箱,一个锅炉,一个强制换热器,两个水泵,两个流量计,一个电动调节阀。
其他还包括加热管,大水箱。
图见1-1。
图1-2 控制流程图在本次课程设计中,首先选取A3000装置中的3#水箱和4#水箱串联组成的液位控制系统,选取控制变量为变频泵的频率,被控变量为4#水箱的液位。
针对上述系统首先建立被控对象模型,然后使用控制系统实验箱搭建电路,模拟水箱液位控制系统的被控对象,最后针对搭建的模拟对象设计控制系统,满足控制要求。
二、建立二阶水箱液位对象模型(一)用机理建模(白箱)方法建立系统模型并线性化。
非线性模型仿真1. 被控对象分析与建模液位控制系统的被控对是二阶水箱,如下图:图2-1 二阶液位控制控制系统结构图图2-2 二阶液位控制控制试验系统图控制作用为u ,控制调节阀LV1001 的开度,从而影响第1 个水箱的液位H1 和第2 个水箱的液位H2 。
第1 个水箱有干扰流量 Q d,两个水箱的截面积都是A 。
控制作用u 和调节阀管道上的流量之间的关系为Q1=K1*U1。
取被控变量为第 2 个水箱的液位H2 ,建立该二阶水箱的状态空间表达式描述的数学模型。
(选取H1 和H2为状态变量,控制作用u 为输入)。
非线性方程为:11122112221332221()1()d dH K U Q K U H dt A dH K U H K U H dt A y H =+-=-=(3)线性模型仿真对状态方程进行增量化,并在工作点处进行线性化 a. 先求出稳态时的关系式11221221332K 0K 0d U Q K U H K U H U H +-=-=(8)b . 将(5)带入(3),进而对微分方程中的各变量用相应的增量代替,有111112211122211332221(U +)1()d d d H K Q Q K U K U H H dt A d H K U H H K U H H dt A ∆=+∆+∆-+∆∆=+∆-+∆(10)c .将上述微分方程(10)进行线性化111111221221121222122332332121(U +)21()22d d d H H K Q Q K U K U H K U dt A H d H H H K U H K U K U H K U dt A H H ∆∆=+∆+∆--∆∆∆=+--(13)d .最后得到线性化的微分方程1111221121222332121()21()22d d H H Q K U K U dt A H d H H H K U K U dt A H H ∆∆=∆+∆-∆∆∆=-(17)代入数值:1H =19.235,2H =23.50,1K =10,2K =1.9,3K =1.65,2U =48,3U =50,1A =850,2A =400,1U =40。
自动控制原理课程设计报告_2
《自动控制原理》课程设计报告班级姓名学号2013 年12 月26 日初始条件: 设单位反馈控制系统的开环传递函数为,试设计一串联校正装置, 使系统满足如下性能指标:静态速度误差系数, 相角裕度。
1.1设计原理所谓校正, 就是在系统中加入一些其参数可以根据需要而改变的机构或装置, 使系统整个特性发生变化, 从而满足给定的各项性能指标。
系统校正的常用方法是附加校正装置。
按校正装置在系统中的位置不同, 系统校正分为串联校正、反馈校正和复合校正。
按校正装置的特性不同, 又可分为超前校正、滞后校正和滞后-超前校正、PID校正。
这里我们主要讨论串联校正。
一般来说, 串联校正设计比反馈校正设计简单, 也比较容易对信号进行各种必要的形式变化。
在直流控制系统中, 由于传递直流电压信号, 适于采用串联校正;在交流载波控制系统中, 如果采用串联校正, 一般应接在解调器和滤波器之后, 否则由于参数变化和载频漂移, 校正装置的工作稳定性很差。
串联超前校正是利用超前网络或PD控制器进行串联校正的基本原理, 是利用超前网络或PD控制器的相角超前特性实现的, 使开环系统截止频率增大, 从而闭环系统带宽也增大, 使响应速度加快。
在有些情况下采用串联超前校正是无效的, 它受以下两个因素的限制:1)闭环带宽要求。
若待校正系统不稳定, 为了得到规定的相角裕度, 需要超前网络提高很大的相角超前量。
这样, 超前网络的a值必须选得很大, 从而造成已校正系统带宽过大, 使得通过系统的高频噪声电平很高, 很可能使系统失控。
2) 在截止频率附近相角迅速减小的待校正系统, 一般不宜采用串联超前校正。
因为随着截止频率的睁大, 待校正系统相角迅速减小, 使已校正系统的相角裕度改善不大, 很难得到足够的相角超调量。
串联滞后校正是利用滞后网络PID控制器进行串联校正的基本原理, 利用其具有负相移和负幅值的特斜率的特点, 幅值的压缩使得有可能调大开环增益, 从而提高稳定精度, 也能提高系统的稳定裕度。
自动控制原理课程设计报告
《自动控制原理》课程设计报告课题名称Matlab软件应用学院自动控制与机械工程学院专业电气工程及其自动化专业班级2009级电气XX班姓名XXX学号XXXXXXXXX时间XXXX年XX月 XX日自动控制原理课程设计报告摘要MATLAB 作为自动控制原理课程学习的主要工具之一在国内外被广泛使用。
该文根据自动控制原理课程学生学习的特点, 探讨了构建基于MATLAB 的实时控制实验系统平台, 以及该平台在自动控制原理课程实验教学中的使用。
关键词自动控制原理实验MATLAB; SIMULINKAbstract:MATLAB is the most ly used tool in the course of control theory. The paper base on learning specialty about control theory, it has established environment for experiment system with real time controlling. The paper introduce to using about the environment.Key words: automation control theory experiment MATLAB SIMULINK目录一、实验目的 --------------------------------------------------------------------------------------------- 3二、实验原理 --------------------------------------------------------------------------------------------- 3<一>、MATLAB简介------------------------------------------------------------------------------ 3<二>、MATLAB桌面系统 ----------------------------------------------------------------------- 4<三>、MATLAB命令窗口 ----------------------------------------------------------------------- 4<四>、MATLAB基本操作命令 ----------------------------------------------------------------- 51、简单矩阵的输入 --------------------------------------------------------------------------- 52、复数矩阵输入 ------------------------------------------------------------------------------ 53、MATLAB语句和变量 -------------------------------------------------------------------- 54、语句以“%”开始和以分号“;”结束的特殊效用 ------------------------------- 65、获取工作空间信息 ------------------------------------------------------------------------ 66、常数与算术运算符 ------------------------------------------------------------------------ 67、选择输出格式 ------------------------------------------------------------------------------ 68、MATLAB图形窗口 ----------------------------------------------------------------------- 79、剪切板的使用 ------------------------------------------------------------------------------ 710、MATLAB编程指南---------------------------------------------------------------------- 7三、MATLAB 语言的特点及其主要功能 ---------------------------------------------------------- 8<一>、MATLAB语言的特点 -------------------------------------------------------------------- 8<二>、MATLAB语言的主要功能 -------------------------------------------------------------- 81) 数值计算功能------------------------------------------------------------------------------- 82) 符号计算功能------------------------------------------------------------------------------- 83) 数据分析功能------------------------------------------------------------------------------- 84) 动态仿真功能------------------------------------------------------------------------------- 95) 程序接口功能------------------------------------------------------------------------------- 96) 文字处理功能------------------------------------------------------------------------------- 9四、具体题目分析说明 -------------------------------------------------------------------------------- 10五、课程设计体会 -------------------------------------------------------------------------------------- 27六、参考文献 -------------------------------------------------------------------------------------------- 28一、实验目的1、了解matlab软件的基本特点和功能,熟悉其界面、菜单和工具条;掌握线性系统模型的计算机表示方法、变换以及模型间的相互转换。
自动控制原理课程设计报告书
磁盘驱动读取系统概述:磁盘驱动读取装置的目标是要将磁头准确定位,以便正确读取磁盘磁道上的信息,由于磁盘旋转速度在1800转/分和7200转/分之间,磁头在磁盘上方不到10nm的地方运动,所以位置精度指标要求非常高。
此系统轨道的位置是通过读取预先录制在上的信息(格式化完成)进行检测的,因此反馈通道的传递函数取为:H(s)=1。
此外我们近似磁头与手臂之间的簧片是完全刚性的,所以影响磁头定位的主要扰动因素是外界的冲击、震动和系统内部参数发生改变等因素,我们要改进控制系统,以减小扰动因素的影响。
在这次设计中我们将用到比例控制,超前校正控制,滞后—超前校正控制等方法。
一、利用实验数据建立对象数学模型(考虑读写头与悬臂刚性连接)实验原理图:相关数据:飞升曲线标幺曲线根据程序:t=t(15:30);y1=y(15:30);y2=y1/0.092008;y3=1-y2;y4=log(y3);plot(t,y4)gridp=polyfit(t,y4,1)并得到:p =-829.6900 1.5860所以:K=-829.69,b=1.586 得到斜率坐标曲线如下图:斜率坐标图计算如下:所以对象传递函数:G(s)=0.92008/(1.156×10-6S3+2.16×10-3S2+S)二、采用比例控制,系统的性能指标要求:超调量%<5%,调整时间t s <200ms ,单位扰动的最大响应小于5‰1、控制系统方块图:R(S) C(S2、根据根轨迹程序:a=[0.92008];b=[1.156e-006 0.00216 1 0]; sys=tf(a,b); rlocus(sys); gridrlocfind(sys)>> Select a point in the graphics window selected_point =-7.4426e+002 -8.3668e+000ians =26.5803得到如图根轨迹:Ka 0.92008/(0.00121S+1)1/(0.000958S+1)1/s 1根轨迹图在保证系统稳定的前提下,折中选出比例增益,系统稳定要求闭环系统的极点位于S平面的右半面,通过根轨迹图可知当%=4.88%时,系统Ka=2473、系统的稳定裕度编程:ka=247;sys1=tf([0.92008*ka],[ 0.00121 1])sys2=tf([1],[0.000958 1 0])sys3=series(sys1,sys2);bode(sys3)gridmargin(sys3)[h r wg wc]=margin(sys3)运行结果:Transfer function:227.3-------------0.00121 s + 1Transfer function:1----------------0.000958 s^2 + sh =8.2297 (幅值欲量h)r =63.7349 (相角欲量r)wg =928.8050 (交接频率w g)wc =215.3773 (截止频率w c)BODE图4、单位阶跃给定作用下的响应曲线编程:ka=247;t=0:0.0001:10;sys1=tf([0.92008*ka],[ 0.00121 1])sys2=tf([1],[0.000958 1 0])sys3=series(sys1,sys2);sys4=feedback(sys3,[1])[y,t]=step(sys4,t);plot(t,y)grid得到曲线如图:5、单位扰动作用下的响应曲线编程:ka=247;t=0:0.001:2;sys1=tf( 1,[0.000958 1 0])sys2=tf(0.92008*ka,[0.00121 1])sys3=feedback(sys1,sys2)[y,t]=step(sys3,t);plot(t,y)grid得到曲线如图:5、小结通过多次改变Ka的可得到以下表中的多组数据:Ka 225 235 247 255 265超调量 3.14% 3.95% 4.88% 5.57% 6.4%调节时间(s)0.014 0.013 0.012 0.012 0.0130.0049 0.0048 0.0046 0.0045 0.0044对单位阶跃扰动的响应的最大值由此折中选择Ka=247为合适的。
自动控制原理课程设计报告

自动控制原理课程设计报告课题:课题十六专业:电气工程及其自动化班级:姓名学号:指导教师:设计日期:成绩:XX学院电气信息学院目录 1 设计目的 1 2 设计要求 2 3 实现过程 3 3.1设计题目 3 3.2 计算过程 3 3.2.1 计算根轨迹图 3 3.2.2 计算Bode图 5 3.2.3 设计系统的串联校正装置 6 3.2.4 给出校正装置的传递函数 7 3.2.5 画出校正前,校正后幅频特性图 7 3.2.6 画出校正前、后开环系统的奈奎斯特图 9 3.2.7 校正器对系统性能的影响 10 4 总结12 参考文献 13 自动控制原理课程设计任务书 1 设计目的 1)掌握控制系统设计与校正的步骤和方法。
(2)掌握对控制系统相角裕度、稳态误差、剪切频率、相角穿越频率以及增益裕度的求取方法。
(3)掌握利用Matlab对控制系统分析的技能。
熟悉MATLAB这一解决具体工程问题的标准软件,能熟练地应用MATLAB软件解决控制理论中的复杂和工程实际问题,并给以后的模糊控制理论、最优控制理论和多变量控制理论等奠定基础。
(4)提高控制系统设计和分析能力。
(5)所谓校正就是在系统不可变部分的基础上,加入适当的校正元部件,使系统满足给定的性能指标。
校正方案主要有串联校正、并联校正、反馈校正和前馈校正。
确定校正装置的结构和参数的方法主要有两类,分析法和综合法。
分析法是针对被校正系统的性能和给定的性能指标,首先选择合适的校正环节的结构,然后用校正方法确定校正环节的参数。
在用分析法进行串联校正时,校正环节的结构通常采用超前校正、滞后校正和滞后-超前校正这三种类型。
超前校正通常可以改善控制系统的快速性和超调量,但增加了带宽,而滞后校正可以改善超调量及相对稳定度,但往往会因带宽减小而使快速性下降。
滞后-超前校正兼用两者优点,并在结构设计时设法限制它们的缺点。
2 设计要求1.前期基础知识,主要包括MATLAB系统要素,MATLAB语言的变量与语句,MATLAB的矩阵和矩阵元素,数值输入与输出格式,MATLAB系统工作空间信息,以及MATLAB的在线帮助功能等。
自动控制原理课程设计报告书CD机

自动控制原理课程设计报告书CD机CD机光驱读盘设讣CD磁头读取装置的U的是要将磁头准确定位,以便正确读取磁盘磁道上的信息,由于磁盘工作时处于高速的旋转。
磁头在磁盘上方不到10nm的地方运动,所以位置精度指标要求非常高。
此系统轨道的位置是通过读取预先录制在上的信息(格式化完成)进行检测的,因此反馈通道的传递函数取为:H(s)=lo此外我们近似磁头与手臂之间的簧片是完全刚性的,所以影响磁头定位的主要扰动因素是外界的冲击、震动和系统内部参数发生改变等因素,我要改进控制系统,以减小扰动因素的影响。
在这次设计中我用到比例-微分控制,超询校正。
一、磁头读取的工作原理磁盘作为一种磁表面存储器,是在非磁性的合金材料表面涂上一层很薄的磁性材料,通过磁层的磁化来存储信息。
硬盘主要山磁盘和磁头及控制电1组成,信息存储在磁盘上,磁头负责读出或写入。
硬盘一开机,其磁盘就开始高速旋转。
磁关可以采用轻质薄膜部件,盘片在高转下产生的气生的气流浮力迫使磁头离开盘面悬浮在盘片上方,浮力与磁头座架弹簧的反向弹力使得磁头保持平衡。
这的非接触式磁头可以有效地减小磨损和山摩擦产生的热量及阻力。
当硬盘接到一个系统读取数据指令后磁头根据给出的地址,首先按磁道号产生驱动信号进行定位然后再通过盘片的转动找到具体的扇区,最后由磁头读取指定位置的信息并传送到硬盘自带的Cache中。
磁盘可以方便有效地储存信息,磁盘驱动器读取装置的U标是要将磁头准确定位,以便正确读取磁盘磁道上的信息。
磁盘驱动器结构示意图如图所示。
1CD机光驱读盘设计磁盘驱动器结构示意图该闭环系统利用电机驱动磁头臂到达预期的位置。
磁盘驱动器的磁头闭环控制系统方框图如图所示。
预期磯实际磯磁盘驱动器的磁头闭环控制系统方框图二、建立对象数学模型:实验原理图C(S)11K R(S) TS1, 1TS2, IS相关数据:t(s) 0 0. 002 0. 004 0. 006 0. 008 0.01 0. 012 0.014 0.016 y(m) 00. 049732 0. 080557 0. 089358 0. 091439 0. 091834 0. 091973 0. 092002 0. 0920082根据程序:CD机光驱读盘设计t=t(15:30);yl=y(15:30);y2=yl/0. 092008;y3=l-y2;y4=log(y3);plot(t, y4)gridp二polyfit(t, y4,1)有关参数:T Y* 1-y* ln(l-y*) 0. 007 0. 98556 0. 01344 -4. 3095 0. 0075 0. 990870. 0091329 -4. 6959 0. 008 0. 99381 0. 0061877 -5. 0852 0. 0085 0. 995820. 004181 -5. 4772 0. 009 0. 99718 0. 0028179 -5. 8718 0. 0095 0. 998110. 0018945 -6. 2688 0. 01 0. 99873 0. 0012705 -6. 6684 0. 0105 0. 999150. 00084964 -7. 0707 0.011 0. 99943 0. 00056635 -7. 4763 0. Olio 0. 999620. 00037597 -7. 886 0. 012 0. 99975 0. 0002482 -8. 3013 0. 0125 0. 99984 0. 00016258 -8. 7244 0. 013 0. 99989 0. 00010525 -9. 1592 0. 0135 0. 999936. 6917e-005 -9.6121 0. 014 0. 99996 4. 1305e-005 -10. 095 0. 0145 0. 99998 2.4207e-005 -10. 629并得到:p =-829. 6900 1.5860 所以:K二-829. 69, b二1.586 得到斜率坐标曲线如下图: 3CD机光驱读盘设汁斜率坐标图所以对象传递函数:-63-32G(s)=0. 92008/(1. 156X10S+2. 16X10S+S)三、采用比例一微分控制1、控制系统方块图:N(S)R(S) c(s) 1/s Kp l+l/(Ts+l) i K/s(Ts+l) 01 2、传递函数与根轨迹不变部分的传递函数为G=k/s(Ts+l) 00由图可知,系统不可变部分与PI控制器串联后,其开环传递函数为4CD机光驱读盘设计2 Gs=kk(Tis+l)/Ts(Ts+1) Opi系统的特征方程为32 TTs+Ts+kpkTs+kk二0 iiOiOp其中,参数T, Ti, k0, kp都是正数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理课程设计题目细菌总数控制系统校正装置设计
专业电气工程及其自动化
姓名 RXY
班级 0906072 学号 090607224
指导教师标职称副教授
州航空工业管理学院
机电工程学院
2011年12月
细菌总数控制系统校正装置设计
一、 设计目的
1. 掌握控制系统的设计与校正方法、步骤。
2.掌握系统超调量、调整时间和单位斜坡响应稳态误差以及动态特性分析。
3.在掌握利用MATLAB 实现系统的仿真和调试。
二、设计任务
已知有单位反馈的某细菌总数控制系统,系统被控对象的传递函数为
)
20(2000
)(0
0+=s s K s G ,用根轨迹法对系统进行串联滞后校正装置设计,使系统的
阶跃响应满足:
1. 超调量%15%≤p M
2. 调整时间s t s 5.0≤
3. 系统单位斜坡响应稳态误差%1≤ssv e 。
三、 设计方法步骤及设计校正构图
3.1滞后校正的设计步骤
使用根轨迹法串联滞后校正一般步骤为: (1) 绘出原系统的根轨迹;
(2) 根据要求的动态响应指标,确定希望的闭环主导极点; (3) 根据幅值条件,确定闭环主导极点对应的开环增益; (4) 确定满足性能指标而应增大的误差系数值;
(5) 由应增大的误差系数值确定校正装置β值,通常取10≤β;
(6) 确定滞后校正装置的零、极点,原则是使零、极点靠近坐标原点,且二者
相距β倍;
(7) 绘出校正后系统的根轨迹,并求出希望的主导极点;
(8) 由希望的闭环极点,根据幅值条件,适当调整放大器的增益; (9) 校验校正后系统各项性能指标,如不满足要求,可适当调整校正装置的零、
极点。
3.2校正前系统分析
令
2000K K =,绘出在
02000K K =下的原传递函数的根轨迹,即
)20()(+=
s s K
s G 的根轨迹
系统的开环传递函数有2个极点:1p =0,202-=p ,无开环零点,即n=2,m=0,系统有2条根轨迹,分别起始于两个开环极点1p =0,202-=p ,2条根轨迹趋向于无穷远处,根轨迹对称于实轴且连续变化,实轴上的根轨迹段位于[0,-20]上,渐近线2条,其渐近线与实轴交点坐标为
a δ=
m
n z
p n i m
j j
i --∑∑==1
1
=0
20200---=-10
渐近线的倾角为a ϕ=m n k -+±π)12(=2
)12(π+±k =
2π±,k=0
根据分离点和汇合点的公式 N '(s)M(s)-N(s)M '(s)=2s+20=0 解得 s=-10,k=0.01 根轨迹与虚轴交点为
D(s)= 0202
=++K s s
D(j ω)=
0202
=++-K j ωω 由
{
202=+-=K ωω,解得
0,0==K ω
在MATLAB 命令窗口中键入以下程序:
>> num=[1]; >> den=[1 20 0];
>> rlocus(num,den) 输入程序后按下回车键就可绘出用MATLAB 绘制出(如下图示)未校正系统的根轨迹
由题目中所给的条件超调量%15%≤p M ,调整时间s t s 5.0≤,所以
%
100*)1exp(2
ξ
ξπ
--
=P M %15≤
s t n
s 5.03
≤=
ξω
可以算出:
{
125.0==n ωξ
所以=-±-=2
1ξ
ωξωn n d j S 106j ±-
1.02000)20(0=+==d
s s s s K
所以传递函数变为:)
20(200
)(0+=s s s G
系统的开环传递函数为
)
20(200
)()(0+=
s s s H s G
首先判别系统的稳定性。
由开环传递函数知,闭环特征方程为
200202
=++s s 根据劳斯判据知闭环系统稳定。
其次,求稳态误差ss e ,因为系统为I 型系统,根据线性系统的齐次性和叠加
性得, 系统的稳态误差
ss e =ssv e =v
K 1=
)
()(lim 0
1
s H s sG s →=
10
1
=10% 与题目要求
%1≤ssv e 相矛盾 故该系统稳定性不令人满意.
3.3校正方法
系统具有满意的动态性能,但其稳定性能不令人满意时,校正的目的主要是为了增大开环增益,且不应使动态性能有明显的变化,故采用串联滞后校正。
校正装置为:T
s T s K Ts Ts K K s G C C
C C βββ1
1
11)(++
=++=, 则校正后系统的静态速度误差系数为:V C c c s V K K K s G s sG K ==→)()(lim '00
因为题中稳态误差要求%1≤ssv e ,所以100'=V K ,
原系统的静态速度误差系数为:1020
1
.0*2000)(00
lim ==
=→S SG K s V 故1010
100
'===
V V K K β 过d S 作射线,使其与ξ线的夹角小于o 10。
此线与负实轴的交点为τ
1
-,根据前
面所求,5.0cos ==θξ,所以060=θ
所以1
04.11
104.0)(++=
s s s G C
因此,校正后的系统开环传递函数为: )104.1)(20()1104.0(2000101)()(00+++=
s s s s K s G s G C =)
104.1)(20()
1104.0(*20+++s s s s
校正后系统根轨迹
在MATLAB 命令窗口中键入以下程序: >> num=[20.8 200]; >> den=[1.04 21.8 20 0]; >> rlocus(num,den)
输入程序后按下回车键就可绘出用MATLAB绘制出(如下图示)校正后系统的根轨迹
在MATLAB中校正前与校正后对比
编写程序如下:
>>numg=200;
>>deng=[1,20,0];
>>[num,den]=cloop(numg,deng);
>>numc=20*[0.104,1];
>>denc=conv([1,0],conv([1,20],[1.04,1]));
>>[numl,denl]=cloop(numc,denc);
>>t=0:0.01:10;
>>[c1,x1,t]=step(num,den,t);
>>[c2,x2,t]=step(numl,denl,t);
>>plot(t,c1,'-',t,c2,'-');
>>grid
输入程序后按下回车键就可绘出用MATLAB绘制出(如下图示)校正前后对比图
四、在MATLAB下,用Simulink进行动态仿真
在Simulink仿真环境下采用串联滞后校正,加校正环节前、后的仿真模型如下图示
校正前、后系统的单位阶跃响应曲线分别如下图:
校正前图
校正后图。