有限元 第四章轴对称问题
第4章 轴对称问题和空间问题有限元法
(1 )(1 2) 1 1
1
0
0
0
0
1 2 2(1 )
7
轴对称单元的特点(与平面三角形单元的区别)
轴对称单元为圆环体,单元与单元间为节圆相连接;
节点力与节点载荷是施加于节圆上的均布力;
单元边界是一回转面;
应变分量 中出现了 ur r ,即应变不是常量;
且应变矩阵在r→0时,存在奇异点,需特殊处
由于几何矩阵中的元素不是常量,单元刚度矩阵需要通过积分得到,
为简化计算可以用三角形单元形心位置的坐标 rc , zc代替 B 矩阵中的变
量 。r, z
rc
1 3
(ri
rj
rm )
zc
1 3
(
zi
zj
zm )
实践证明采用近似积分也能达到一定的精度,具体对于三角形环单元
用形心处坐标代替应变矩阵中的坐标变量。
uj wj
N
q
um
wm
单元应变:
将单元位移函数代入几何方程得:
u r
1 2A (biuiBiblioteka bju jbmum )
u r
1 2A
(
fi
ui
f
ju j
f mum )
11
其中,
fs
as r
bs
cs zs r
(s i, j, m)
w z
1 2A
(ci
wi
cjwj
cmwm )
u z
1 2A (ciui
Fe
Fir
Fiz
=
2A
15
9rc2
0
2ri2
rjrm
(3) 分布面力移置
第4章 空间问题有限元分析-轴对称
Re N T f p
FL e 2 r0 N T 62 f p 21
圆环 2 r0 Ni f pr Ni f pz N j f pr
N j f pz
Nm f pr
T
Nm f pz
r0 -- 集中力作用点的径向坐标。
2019/10/18
第4章 空间问题有限元分析 空间轴对称问题
曹国华
2019/10/18
空间有限元分析-轴对称
1
主要内容
§ 4.1位移模式 § 4.2几何方程 § 4.3单元刚度 § 4.4等效载荷
2019/10/18
空间有限元分析-轴对称
3
1、研究对象
当弹性体的几何形状,约束情况,以及所受的外力都 轴对称于某一轴,则这种弹性体的应力分析问题称为轴对 称应力分析问题,在工程中如 活塞,压力容器等 。
空间有限元分析-轴对称
12
几何方程与物理方程
PA线应变
0,(略去高阶小量).
PB线应变
εφ
PB PB PB
(u
φ
uφ φ
d φ)
u
ρdφ
1 uφ ; ρ φ
PA转角
α
DA
uφ ρ
d
ρ
uφ
,
PA d ρ ρ
2019/10/18
空间有限元分析-轴对称
空间有限元分析-轴对称
28
等效载荷
r Niri N j rj Nmrm
2、体积力移置
FFGee 2 [N] f rdrdz
若体积力为重,则单位体积 的力为
f
=-0
轴对称问题有限元法分析
轴对称问题的有限元模拟分析一、摘要:轴对称问题是弹性空间问题的一个特殊问题,这类问题的特点是物体为某一平面绕其中心轴旋转而成的回转体。
由于一般形状是轴对称物体,用弹性力学的解析方法进行应力计算,很难得到精确解,因此采用有限元法进行应力分析,在工程上十分需要,同时用有限元法得到的数值解,近似程度也比较好。
轴对称问题的有限元分析,可以将要分析的问题由三维转化为二维平面问题来解决。
先是结构离散,然后是单元分析,再进行总纲集成,再进行载荷移置,最后是约束处理和求解线性方程组。
分析完成之后用ABAQUS软件建模以及分析得出结果。
关键字:有限元法轴对称问题ABAQUS软件二、前言:1、有限元法领域介绍:有限单元法是当今工程分析中获得最广发应用的数值计算方法,由于其通用性和有效性,受到工程技术界的高度重视,伴随着计算机科学和技术的快速发展,现在已经成为计算机辅助设计和计算机辅助制造的重要组成部分。
由于有限元法是通过计算机实现的,因此有限元程序的编制以及相关软件的研发就变得尤为重要,从二十世纪五十年代以来,有限元软件的发展按目的和用途可分为专用软件和大型通用商业软件,而且软件往往集成了网络自动划分,结果分析和显示等前后处理功能,而且随着时间的发展,大型通用商业软件的功能由线性扩展到非线性,由结构扩展到非结构等等,这一系列强大功能的实现及运用都要求我们对有限元法的基础理论知识有较为清楚的认识以及对程序编写的基本能力有较好掌握。
2、研究报告目的:我们小组研究的问题是:圆柱体墩粗问题。
毛坯的材料假设为弹塑性,弹性模量210000MPa,泊松比0.3,塑性应力应变为圆柱体毛坯直径d=50mm,高度l=60mm;凸模直径D1=70mm;凹模直径D2=80mm;凸模从接触圆柱体上表面开始向下运动10mm;模具及板材之间的摩擦系数为0.1。
确定圆柱体变形后,凸模所受的反作用力大小.3、研究报告的预期结果:用abaqus建模,通过后期处理计算出应力大小。
4 弹性力学轴对称问题的有限元法
4. 彈性力學軸對稱問題的有限元法本章包括以下內容:4.1用虛功方程建立有限元方程 4.2三結點單元位移函數 4.3三結點單元剛度矩陣 4.4載荷移置4.5軸對稱分析舉例4.1用虛功方程建立有限元方程物體的幾何形狀、約束情況及所受的外力都對稱於空間的某一根軸,因此在物體中通過該軸的任何平面都是對稱面,所有應力、應變和位移也對稱於該軸,這類問題稱為軸對稱問題。
研究軸對稱問題時通常採用圓柱坐標系(r ,θ,z ),以z 軸為對稱軸。
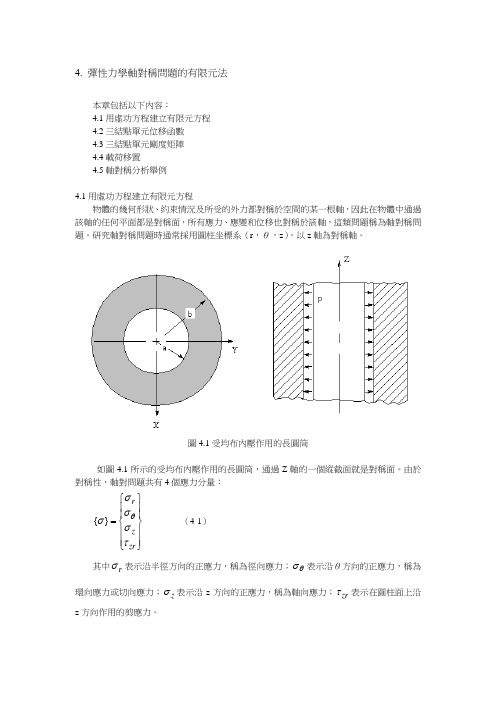
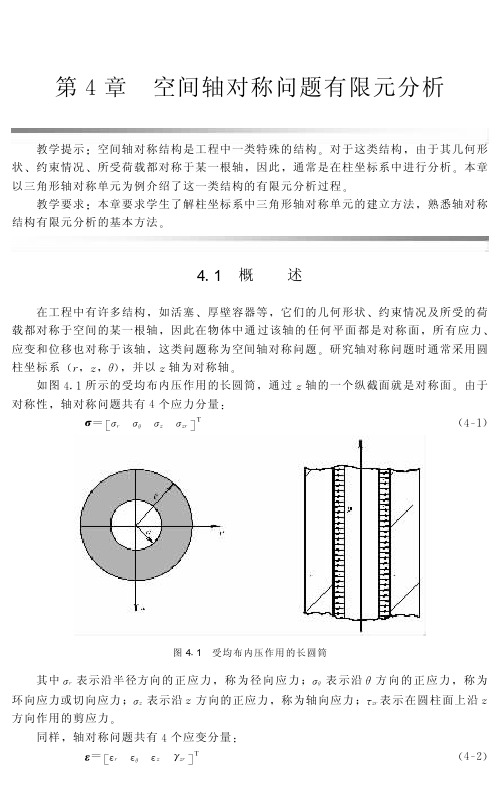
圖4.1受均布內壓作用的長圓筒如圖4.1所示的受均布內壓作用的長圓筒,通過Z 軸的一個縱截面就是對稱面。
由於對稱性,軸對問題共有4個應力分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zrz r τσσσσθ}{ (4-1)其中r σ表示沿半徑方向的正應力,稱為徑向應力;θσ表示沿θ方向的正應力,稱為環向應力或切向應力;z σ表示沿z 方向的正應力,稱為軸向應力;zr τ表示在圓柱面上沿z 方向作用的剪應力。
同樣,軸對稱問題共有4個應變分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zrz r γεεεεθ}{ (4-2)其中r ε表示沿半徑方向的正應變,稱為徑向正應變;θε表示沿θ方向的正應變,稱為環向正應變或切向正應變;z ε表示沿z 方向的正應變,稱為軸向正應變;zrγ表示沿r 和z方向的剪應變。
在軸對稱問題中,彈性體內任意一點上,不存在切向位移,只存在徑向位移u 和軸向位移w ,兩個位移分量表示為,⎭⎬⎫⎩⎨⎧=w u f }{(4-3)在討論彈性力學平面問題的有限元法時,我們先由將彈性體劃分為有限個單元的組合體,由虛功方程得到單元剛度矩陣,集成後得到整體剛度矩陣。
在這裏,我們用虛功方程直接得到軸對稱問題的有限元列式。
由虛功方程可得,外力虛功等於內力虛功或虛應變能, ds p f dxdydz F f dxdydz TsTT}{}{}{}{}{}{***⎰⎰⎰⎰⎰⎰⎰⎰+=σε(4-4)其中{F}為體力,{p}為面力。
有限单元法 第4章 空间轴对称问题有限元分析
+
# % ! 5 & +
习 !! 题
# " 如图 ! " ) 所示两个轴对称三角形单元 $ 其形状 ) 大小 ) 方位均相 同 $ 但位置 不同 ( 设材料弹性模量为 1$ 泊松比为&$/ 坐标!) " # ($ 试分别计算两单元的刚度矩阵 # " 取平 均值 ) ) % ( " ,
! ’ -! !
&
’
& " / / / ) $ * , / $ ) ! # 0 *$+% / $ /* ! !
! "# "$! 等效结点荷载的计算 %集中力 # 集中力的处理很简单 $ 一般直接把集中力作用点取为结点 $ 不需要作特殊处理 $ 就可 以直接把集中力加入到结点荷载列阵中去 ( %体积力 & 设单元内单位体积上作用的体积力为 ’ ’ $ 则移置到单元各结点的等效结点力为
"$# #’ #$ $ # # #+ % )! *! , / / # % / / # 0 & # / $ ) ! " *&+# /$ & ( / /
.
" # ! # # & " # ! # # )
" # ! # # !
/ , / $ & 由于在 0 是坐标 & 的函数 & ! " $ / ! 分量在单元中不为常量 & 其他三 个应变 分量 在单元
图! "!! 习题 # 图
$ 所示的是受轴向压缩的圆柱体 " 直径5$ ) " 如图! " (# 1 # / 3 6" 长度6 $ # & 3 6" 两端面 受均布载荷" & 如图 ! $ 所示$ % + / 7 8 1作用 % 现取轴对称面的 # ! 均匀划分单元 # " (# 2 "$ # $写出离散体的位移约束条件 % # # $求单元 " ’ # ’ $ ’ % 的等效结点荷载 % & $写出结点 #’&’)’!’(’+ 的荷载矩阵 % # )
有限元 第4讲 轴对称问题与空间问题有限元法

u z v 0 w y x
© BIPT
3.物理方程
r D z rz 1 1 E (1 ) D (1 )(1 2 ) 1 0
1 rc (ri r j rm ) z c 1 ( zi z j z m ) 3 3
实践证明采用近似积分也能达到一定的精度,具体对于三角形环单元 用形心处坐标代替应变矩阵中的坐标变量。
© BIPT
应变矩阵变成:
B Bi
Bj
Bm
其中:
单元刚度矩阵的近似表达式为:
其中:
1 A 1 rj 2 1 rm
1
ri
zi zj zm
ai rj zm zmrj a j rm zi zi rm
bi z j zm bj zm zi bm zi z j
ci rm rj c j ri rm cm rj ri
am ri z j z j ri
x y y w 0 z z u v xy y x y yz v w 0 zx z y w u x z z y 0 x z 0
1.离散化 由于可视为子午面内平面物体绕轴旋转一周的结果,因此轴对称问 题分析可在子午面内划分单元,实际是取子午面内图形绕对称轴旋转所得“圆环 形单元”对物体进行离散。因此可用的单元与平面问题一样。 2.应力和应变 对轴对称问题进行分析一般取柱坐标系,对称轴为Z轴,径向 为r 轴,环向为θ轴。 z
第四章轴对称问题
主要内容: 4-1轴对称问题有限单元法 4-2空间问题常应变四面体单元
轴对称结构体可以看成由任意
一个纵向剖面绕着纵轴旋转一周而 形成。此旋转轴即为对称轴,纵向 剖面称为子午面,如图4-1表示一 圆柱体的子午面abcd被分割为若干 个三角形单元,再经过绕对称轴旋 转,圆柱体被离散成若干个三棱圆 环单元,各单元之间用圆环形的铰 链相连接。对于轴对称问题,采用 圆柱坐标较为方便。以弹性体的对 称轴为z轴,其约束及外载荷也都 对称于z轴,因此弹性体内各点的 各项应力分量、应变分量和位移分 量都与环向坐标θ无关,
zi , z j , zm, ri , rj , rm 及结点位移ui , uj , um, wi , w j , wm代入式(4-4)中,可以 解出六个待定系数 1, 2, 。,再6 将这些待定系数回代到式 (4-4)中,就可以得到由结点位移和形函数所表示的单元内任 一点的位移表达式
u Ni ui N j u j Nmum w Ni wi N j w j Nmwm
bi A1 fi
Si
2 A3 A
A1
bi
A1bi A2ci
fi fi
A1ci
ci
i, j, m
A1ci A2bi
返回
其中
u A1 1 u
,
1 2u
A2 21 u
,
1 uE A3 41 u1 2u
从(4-14)式可知,只有剪应力在单元中是常数,而其他 三个正应力在单元中都不是常数,与坐标r和z有关。同样 采用形心坐标和来代替,每个单元近似地被当作常应力单 元,所求得的应力是单元形心处的应力近似值。
e1
e1
这就是求解结点位移的方程组,写成标准形式
有限元中对称与反对称问题总结

对称与反对称问题总结一、什么是对称或者反对称约束?1、对称边界条件在结构分析中是指:不能发生对称面外(out-of-plane)的移动(translations)和对称面内(in-plane)的旋转(rotations)。
这句话可以理解为:在结构中施加对称条件为指向边界的位移和绕边界的转动被固定。
例如,若对称面的法向为X,如果你在对称面上的节点上施加了对称边界条件,那么:1)不能发生对称面外的移动导致节点处的UX(法向位移)为0。
2)不能发生对称面内的旋转导致ROTZ,ROTY(绕两个切线方向的转角)也为0。
2、反对称边界条件在结构分析中是指:不能发生对称面内(in-plane)的移动(translations)和对称面外(out-of-plane)的旋转(rotations)。
这句话可以理解为:在结构中施加反对称条件为平行边界的位移和绕垂直边界的转动被固定。
例如,若对称面的法向为X,如果你在对称面上的节点上施加了反对称边界条件,那么:1)不能发生对称面的移动导致节点处的UY,UZ(切向位移)为0。
2)不能发生对称面外的旋转导致ROTX(绕法线方向的转角)也为0。
建立对称约束的目的就是为了建模方便和减少计算量,这样就可以大大节省计算机的资源,从而更加细化网格,得到比研究整个模型更精确的结果!注意:模态分析的时候应用对称约束会漏掉对称模态!二、HM中的对称约束和反对称约束这个功能在ansys中对应的为Symmetry或者unsymmetry。
HM中不能施加对称约束,但是可以直接对对称面上的节点施加单点约束就行,施加面外位移约束和面内转动约束。
即对垂直于对称面的方向施加位移约束,另外两个方向施加转动约束。
对于对称,对称面的法向移动和对称面内的转动全约束。
比如对称面是yz平面,在HM 中:dof1=0 dof5=0 dof6=0。
反对称和对称正好相反,其意思对于同一个对称面,反对称和对称所约束的自由度正好相反。
2014-计算力学-4-轴对称问题有限元
Nj 0
0 Nj
Nm 0
e
N m I
0 i j Nm m
(4-11)
N
其中:[I]为二阶单位矩阵
1 0 I 0 1
因此,形函数矩阵的表达式为
Ni N 0 0 Ni Nj 0 0 Nj Nm 0 0 Nm
bi A1 f i 2 A3 A1 bi f i Si A b f 1 i i A2 ci A1ci ci A1ci A2 bi
i, j, m
单元分析
其中
u A1 1 u , 1 2u A2 21 u
rr
于是
1 ri r j rm 3 1 z z zi z j z m 3
fi fi ai cz bi i r r
i, j, m
有限元网格确定后,各单元的就是定值。这样就可以把轴对称问题的各 单元看成是常应变矩阵,所求得的应变是形心处的应变值。当轴对称结 构的单元划分比较小时,这种近似所引起的误差是很小的。特别当结构 上各单元的形心离 Z 轴 较远时,产生的误差就更小了。
u N i ui N j u j N m um w N i wi N j w j N m wm
(4-5)
单元分析
其中形函数
Ni
a
i
bi r ci z
2
i,
j, m
(4-6) (4-7)
而
1 1 rj 2 1 rm
1 ri
zi zj zm
ai
rj rm
zj zm
轴对称问题

(i , j , m )
由上式可见,单元内应变 εr、εz、γrz都是常量,但φi, φj, φm与各单元中各点的位置(r, z)有关,环向应变εθ不是常量; 当结构包含对称轴(r = 0)在内时,φi , φj , φm是奇异的, 这将给数值计算带来困难。
汽车工程系
结构分析与CAE研究室
- 16 -
z j
wj uj wi ui
单元结点力向量:
wm um
i m
{ f }e
⎧ fi ⎫ ⎪ ⎪ = ⎨fj ⎬ ⎪ ⎪ ⎩ f m ⎭ 6×1
r
汽车工程系
结构分析与CAE研究室
- 11 -
4.2 三结点三角形轴对称单元
4.2.2 单元位移模式 由于有三个结点,在r方向和z方向上各有三个结点条件, 因此设它的单元位移模式为
u ( r , z ) = α1 + α 2 r + α 3 z ⎫ ⎬ w(r , z ) = α 4 + α 5 r + α 6 z ⎭
该位移模式与平面问题三结点三角形单元完全相同。同样, 将结点坐标和结点位移代入上式可得到单元内部位移
⎧ ui ⎫ ⎪w ⎪ ⎪ i⎪ 0 ⎤ ⎪uj ⎪ e ⎪ ⎪ ⎨ ⎬ = [ N (r , z )]{δ } Nm ⎥ ⎪ wj ⎪ ⎦ ⎪ um ⎪ ⎪ ⎪ ⎪ wm ⎪ ⎩ ⎭
-5-
4.1 基本概念
4.1.2 基本方程 ①平衡方程
∂σ r ∂τ zr σ r −σ θ + + + br = 0 ∂r ∂z r ∂σ z ∂τ rz τ rz + + + bz = 0 ∂z ∂r r ⎫ ⎪ ⎪ ⎬ ⎪ ⎪ ⎭
空间与轴对称问题有限元分析
划分网格
将连续的求解域离散化为有限个简单 元,形成网格。
建立刚度矩阵和载荷向量
根据每个简单元的特性,建立刚度矩 阵和载荷向量,以描述简单元之间的 力和力矩关系。
求解线性方程组
通过求解线性方程组,得到每个节点 的位移和应力分布。
有限元分析的优势与局限性
优势
有限元方法具有较高的灵活性和通用性,可以处理复杂的几何形状和边界条件, 适用于各种物理问题的求解。此外,有限元方法可以通过并行计算等技术提高 计算效率。
05
空间与轴对称问题有限元分析 的未来发展
新型有限元方法的研究与应用
混合有限元方法
结合不同类型有限元的优点,以更好地适应复 杂问题的需求。
自适应有限元方法
根据问题求解的实际情况,自动调整有限元的 尺寸和形状,以提高求解精度和效率。
非标准有限元方法
针对特定问题开发非标准的有限元,以获得更好的求解效果。
复杂空间与轴对称问题的挑战与解决方案
高维空间问题
01
随着问题维度的增加,有限元的构造和求解变得更加复杂,需
要发展更高效的算法和软件。
不规则区域问题
02
有限元的构造和处理在不规则区域上更具挑战性,需要研究新
的方法和技巧。
多物理场耦合问题
03
多物理场耦合的空间与轴对称问题需要发展能够同时处理多个
物理场的有限元方法。
误差估计
对称性有助于更准确地估计误差。
空间对称性问题的有限元模型建立
01
02
03
定义对称轴
明确对称轴的位置,以便 在建立模型时考虑对称性。
选取合适的有限元
根据对称性选择合适的有 限元类型,如四边形、六 面体等。
建立对称约束
弹性力学问题的有限元法_轴对称问题

A
Wi U j W j U m Wm
S
T
2 r p 0
2013-7-24
11
Ni e R 2π A 0
0 Ni
Nj 0
0 Nj
Nm 0
0 2r rdrdz Nm 0
T
使用
Ni Li (i, j, m) r Lr L r L r i i j j m m , 得到 2 A ! ! ! Li L j Lmdrdz z ! A
Ri
当
e
0 πA 2ri rj rm 6
(i, j, m)
rc ri r j rm, 则有
1 Wi W j Wm 2πArc 3
2013-7-24 13
面积力 沿单元的jm面
Ni e R 2π A 0 0 Ni Nj 0 0 Nj Nm 0
L j q q 0
0 L j q rdS Nm 0
T
z
m
j i r 2013-7-24
q
14
在 jm面 ,
z
m j i r q
整合,
Ni 0, N j L j , N m Lm r L j rj Lm rm ! ! l Li L j dS l 1!
(i, j , m)
u f N e N i I 2 w
N j I2
N m I 2
e
备注:
平面三角形单元 轴对称三角形单元
x, y
r, z
4
第四章轴对称问题有限元法

第四章轴对称问题有限元法第四章轴对称问题有限元法在⼯程问题中经常会遇到⼀些实际结构,它们的⼏何形状、约束条件和外载荷均对称某⼀固定轴,我们把该固定轴称为对称轴。
则在载荷作⽤下产⽣的应⼒、应变和位移也都对称此轴。
这种问题就称为轴对称问题。
在离⼼机械、压⼒容器、矿⼭机械、飞⾏器中经常遇到轴对称问题。
第⼀节轴对称问题弹性⼒学基本⽅程对于轴对称问题,宜采⽤圆柱坐标系(,,r z θ)。
如果将y弹性体的对称轴作为Z 轴,则所有应⼒、应变和位移分量都只是r 和Z 轴的函数,⽽与θ⽆关,即不随θ变化。
弹性体内任意⼀点只有两个位移:即沿r ⽅向的径向位移u 和沿Z ⽅向的轴向位移w 。
由于轴对称,沿θ⽅向的环向(周向)位移v 等于零。
因此轴对称问题是⼆维问题。
在轴对称弹性体内⽤相距的两个圆柱⾯和过轴线互成d θ⾓的两个铅垂⾯切割出⼀个⾼为的微元体,如图2所⽰。
(a)σ(b)沿r ⽅向作⽤的正应⼒r σ称为径向应⼒沿θ⽅向作⽤的正应⼒θσ称为环向应⼒沿z ⽅向作⽤的正应⼒z σ称为轴向应⼒⾯内的剪应⼒ zr τ=rz τ故轴对称弹性体内任意⼀点的应⼒分量{}[]Tr z rz θσσσστ=对应的轴对称弹性体内任意⼀点的应变分量{}[]Tr z rz θεεεεγ=其中r ε沿r ⽅向径向线应变θε沿θ⽅向环向线应变 z ε沿z ⽅向轴向线应变 rz γ⾯内的剪应变与平⾯问题相⽐,轴对称问题多了⼀个环向应变θε。
弹性体受载时,点(,,r z θ)产⽣径向位移u ,使过点(,,r z θ)的周长增加了2()2r u r ππ+-,因⽽产⽣相对伸长,即环向应变:2()22r u r u r rθππεπ+-==轴对称问题的⼏何⽅程(应变与位移之间的关系)为,,,r z zr u u w w ur r z r zθεεεγ====+写成矩阵形式{}r z rz u r u rw z u w z r θεεεεγ==+??根据虎克定律,应⼒与应变的关系为1()r r z Eθεσµσσ=-+ 1()z r Eθθεσµσσ=-+ 1()z z r Eθεσµσσ=-+ 12(1)rz rz rz r G Eµττ+==由上式得[]10111011(1)(1)(12)101112002(1)r z zr r z rz E θθσσσστµµµµεµµεµµµµµεµµµµγµµ=??--??---??????+---????-????-?= (4-2)这⾥弹性矩阵[D]为[D]=10111011(1)(1)(12)101112002(1)E µµµµµµµµµµµµµµµµµ?-----+-----第⼆节三⾓形截⾯环单元⼀、结构离散化离散化轴对称体时,采⽤的单元是⼀些圆环。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其中子矩阵
K k
st
s 1,2,, n; t 1,2, , n
返回
e 1
st
(4-29)
第三节
等效结点载荷计算
与平面问题类似,当结构外载荷不作用在结点上时,也 需要将这些作用在环形单元上的集中力、表面力和体积力分 别等效移置到结点上。移置的原则也是要求这些外力和等效 结点载荷在任意虚位移上所作的虚功相等,即
z
d
c
m j
i i
m j
a b
r
图4-1 轴对称结构
相邻的单元由圆环形 的铰链相连接。单元的棱 边都是圆,故称为结圆。 每个结圆与rz平面的交点称 为结点。 如图4-2中的 i, j, m点。
z rj j
rm
m
v
u ri i
这样,各单元在子午面rz平 面上形成三角形网格,就如 同平面问题中在xy平面上的 网格一样。采用位移法有限 元分析,其基本未知量为结 点位移。单元的结点位移列 阵如下:
T * e
Re * rdrdzd
T
(4-17)
上式等号左边为单元结点力所作的虚功,与平面问题不同的是 这里所说的结点力是指作用在整个结圆上的力,等式右边是指 整个三角形环状单元中应力的虚功。 将(4-14)式和(4-16)式代入(4-17)式,则得
R
单元的各应力分量可通过将式(5-12)代入轴对称问题 的物理方程得到
r e Z D D B S i rZ
Sj
S m
e
(4-14)
式中:[S]是三角形截面环形单元的应力矩阵。它的子矩阵为
u N i ui N j u j N m um w N i wi N j w j N m wm
(4-5)
其中形函数
Ni
ai bi r ci z i, j,m 2A
1 ri zi zj zm
(4-6)
而
A
1 1 rj 2 1 rm
(4-7)
ai
rj rm
( i,j,m)
返回
可以看出,单元中的应变分量 r、 z、 rz ,都是常量,但是环 向应变 不是常量,而是坐标r和z的函数。为了简化计算, 通常采用单元的形心坐标值 r , z 来近似代替(4-12)中的r, z值,即令
1 r r ri r j rm 3 1 z z zi z j z m 3
z
d
c
m j
i i
m j
a b
r
图4-1 轴对称结构
返回
只是径向坐标r和轴向坐标z的函数。也就是说,在任何一个过 z轴的子午面上的位移、应变和应力的分布规律都相同。因此 轴对称问题可把三维问题简化为以(z,r)为自变量的二维 问题。 由于轴对称性,弹性体内各点只可能存在径向位移u和 轴向位移w。此时,位移u、w只是r、z的函数,而环向位移 v=0。即:
R
e1
e
ne T 2 B D Brdrdz e1
(4-25)
这就是求解结点位移的方程组,写成标准形式
K R
返回
整体刚度矩阵
K k 2 B D Brdrdz
图4-2
r
e
T i
T j
T T m
u
i
wi
uj
wj
um
wm
T
(4-3)
对于每一个环形单元,需要假定其位移模式。仿照平面三 角形单元,取线性位移模式
u u( r, z ) 1 2 r 3 z w w( r, z ) 4 5r 6 z
K
e e
(4-19)
K e 就是单元刚度矩阵 式中,
K e 2 BT D Brdrdz
写成分块形式,则为 (4-20)
K e
kii k ji k mi
kij k jj k mj
kim k jm k mm
i, j, m
于是
fi fi
ai cz bi i r r
作了这样的近似后,各单元的应变分量就是定值。这样就可 以把轴对称问题的各单元看成是常应变矩阵,所求得的应变 是形心处的应变值。当轴对称结构的单元划分比较小时,这 种近似所引起的误差是很小的。特别当结构上各单元的形心 离Z轴较远时,产生的误差就更小了。 返回
(4-21)
返回
其中每个子矩阵为
kst e 2 Bs D Bt rdrdz
T
s, t i, j, m (4-22)
在轴对称问题中,矩阵[B]不是常数而是坐标r, z的函数,所以 (5-22)式的积分运算比平面问题要复杂得多。为了简化计算 仍取单元形心的坐标 r , z 代替矩阵[B]中的坐标r, z,得到一个近 似的单元刚度矩阵。此时,(5-22)式可以写成
zj zm
rj zm rm z j z j zm
(4-8)
bi
1 zj 1 zm
i, j, m
(4-9)
1 rj ci rm r j 1 rm
(4-10)
(4-5)式也可以写成矩阵形式
u
u e N w
Ni 0
(5-24)
返回
求得单元刚度矩阵后,就可以采用与平面问题相同的刚度集 成法,进行整体刚度矩阵的组集。如果将结构划分成 ne 个单 元和n个结点,就可得到 ne 个类似(5-19)式的方程组。把 e , R e , Ke 等都扩大成整个结构的自由度的维数, 各单元的 然后叠加得到:
0 ci 0 bi
bj 0 fj cj
0 cj 0 bj
bm 0 fm cm
返回
式中
ai ci z fi bi r r
(i,j,m)
上式可简写成
B e
(4-13)
其中 [B]为三角形断面环元的应变矩阵,它可写成分块矩阵形 式[B]=[Bi Bj Bm]
bi 1 0 Bi 2 f i ci 0 ci 0 bi
(4-4)
类似于平面三角形单元的推导,即将单元的结点坐标 zi , z j , z m , ri , rj , rm 及结点位移 ui , u j , um , wi , w j , wm 代入式(4-4)中,可以 , 6 解出六个待定系数 1, 2, 。再将这些待定系数回代到式 (4-4)中,就可以得到由结点位移和形函数所表示的单元内任 一点的位移表达式
u u( r , z ) w w( r , z ) v0
(4-1)
返回
一、单元位移模式 由于轴对称性,我们只需分析 任意一个子午面上的位移、应力和 应变情况。其有限元分析计算步骤 和平面问题相似。首先进行结构区 域的有限元剖分。采用的单元是三 角形、矩形或任意四边形环绕对称 轴z旋转一周而得到的整圆环,通 常采用的单元是三角形截面的整圆 环。在单元类型确定之后,单元剖 分可以在子午面内进行,如图4-1 表示的abcd子午面被分割为若干个 三角形,绕对称轴z旋转后即形成 若干个三棱圆环单元。
0 Ni
Nj 0
0 Nj
Nm 0
0 i j N m m
(4-11)
返回
二、单元应变与应力 为了将单元任意点的应变和应力用结点位移表示,可按以 下步骤推导。 将式(4-5)代入轴对称问题的几何方程,便得到单元体内 的应变,即
u r bi r w 0 z z 1 u 2 A fi rz r ci u w z r ui 0 wi cm u j 0 w j (4-12) bm um wm
K1i K ii K ji K mi K ni
K1 j K ij K jj K mj K nj
ne
K1m K im K jm K mm K nm
K1n K in K jn (4-28) K mn K nn
第四章 轴对称问题的有限单元法 主要内容: 4-1轴对称问题有限单元法 4-2空间问题常应变四面体单元
轴对称结构体可以看成由任意 一个纵向剖面绕着纵轴旋转一周而 形成。此旋转轴即为对称轴,纵向 剖面称为子午面,如图4-1表示一 圆柱体的子午面abcd被分割为若干 个三角形单元,再经过绕对称轴旋 转,圆柱体被离散成若干个三棱圆 环单元,各单元之间用圆环形的铰 链相连接。对于轴对称问题,采用 圆柱坐标较为方便。以弹性体的对 称轴为z轴,其约束及外载荷也都 对称于z轴,因此弹性体内各点的 各项应力分量、应变分量和位移分 量都与环向坐标θ无关,
e T e1 e1
ne
ne
(4-26)
整体结点载荷列阵
R R e
e1
ne
(4-27)
与平面问题一样,轴对称问题的整体刚度矩阵[K]也是对称的 带状稀疏矩阵,在消除刚体位移后,它是正定的。
整体刚度矩阵[K]也可以写成分块形式
返回
K11 K i1 K K j1 K m1 K n1
T * e
R e f * 2 rc g f * qrd ds f * prd drdz