自适应滤波器的设计开题报告
自适应滤波器开题报告
自适应滤波器开题报告篇一:通信滤波器开题报告沈阳航空航天大学北方科技学院毕业设计开题报告论文题目:通信滤波器的设计与分析专业:电子信息工程班级: B941201学号: B941XX1学生姓名:张弛指导教师:赵婷婷一、立题依据1、选题目的我的毕业设计的课题是《于基于matlab的数字滤波器的设计与仿真》,其主要目的是通过此次课程设计进一步学习和巩固数字信号处理及其相关知识,并学会利用所学的知识能在设计过程中能综合运用所学习的知识内容,进一步熟悉和掌握matlab的使用方法;对数字滤波器的原理有较深的了解;为即将进入社会参加工作打下坚实的基础;掌握收集资料,消化资料和综合资料的能力等等。
2、选题的意义滤波器早被公认为各种电子产品的重要部件,其主要功能是作为各种电信号的提取、分隔、抑止干扰。
而传统的模拟滤波器在精度方面无法与数字滤波器相比,尤其在多阻带多通带滤波器设计方面,模拟滤波器更是无能为力,因此对数字滤波器的研究是十分必要且有应用价值的。
从事电子通信业而不能熟练操作使用matlab电子线路设计软件电子线路设计软件,在工作和学习中将是在工作和学习中将是在工作和学习中寸步难行的。
在数学、电子、金融等行业,使用matlab等计算机软件对产品进行设计、仿真在很早以前就已经成为了一种趋势,这类软件的问世也极大地提高了设计人员在通信、电子等行业的产品设计质量与效率。
众所周知,实际过程中信号传输都要经过调制与解调这一过程,由于消息传过来的原始信号即调制信号具有频谱较低的频谱分量,这种信号在许多信道中不宜传输。
因而,在通信系统的发送端通常需要有调制过程在通信系统的发送端通常需要有调制过程,反之在接收端则需要有解调过程。
3、国内外研究现状数字滤波器的设计实现,常常需要同时满足多个技术指标或达到较高的精度,设计工作比较复杂,并且是只能逼近工程应用实际指,因此要提高滤波器的性能,设计过程中必须进行大量复杂的推倒和运算,运算量大。
自适应滤波器设计分析
自适应滤波器设计分析自适应滤波器是一种根据输入信号的特征自动调整滤波器参数的数字滤波器。
它可以根据输入信号的统计特性,动态地调整滤波器的频率响应,以实现对不同频率成分的有效过滤。
自适应滤波器被广泛应用于信号处理、通信系统、控制系统等领域。
1.自适应滤波器的基本结构:自适应滤波器一般由输入信号、期望输出信号、滤波器系数估计器和滤波器组成。
输入信号经过滤波器和滤波器系数估计器的处理后,输出信号与期望输出信号之间的误差作为反馈输入到滤波器系数估计器中,用于更新滤波器系数。
常用的自适应滤波器结构包括最小均方误差(LMS)滤波器和最小均方误差(RLS)滤波器等。
2.自适应滤波器的性能评价指标:自适应滤波器的性能主要通过均方误差(MSE)和收敛速度来评价。
均方误差反映了滤波器输出与期望输出之间的误差大小,收敛速度表示滤波器算法收敛到稳定状态所需的时间。
较低的均方误差和较快的收敛速度是自适应滤波器设计的目标。
3.自适应滤波器的优化算法:常用的自适应滤波器优化算法包括LMS算法、RLS算法、NLMS算法等。
LMS算法通过最小化均方误差来更新滤波器系数,是一种简单有效的算法,但收敛速度较慢;RLS算法通过最小化加权过去误差序列的均方和来更新滤波器系数,收敛速度较快但计算量大;NLMS算法在LMS算法的基础上进行改进,通过动态调整步长参数来加快收敛速度。
4.自适应滤波器的应用:自适应滤波器广泛应用于信号处理、通信系统、控制系统等领域。
在信号处理领域,自适应滤波器可以应用于降噪、滤波、谱估计等任务;在通信系统中,自适应滤波器可以用于信道均衡、自适应干扰消除等;在控制系统中,自适应滤波器可以用于系统辨识、参数估计、自适应控制等。
综上所述,自适应滤波器设计分析涉及到基本结构、性能评价指标、优化算法和应用等多个方面。
在实际应用中,需要根据具体任务的要求选择适当的自适应滤波器结构和优化算法,并通过性能评价指标来评估滤波器的性能。
自适应IIR滤波器及线性自适应逆的MRAC研究的开题报告
自适应IIR滤波器及线性自适应逆的MRAC研究的
开题报告
一、研究背景
1.1 自适应滤波器
随着数字信号处理技术的不断发展,自适应滤波器在很多领域得到了广泛的应用,如通讯、音频、视频等领域。
自适应滤波器根据输入信号和误差信号之间的关系来更新滤波器系数,从而实现对输入信号的滤波和处理。
1.2 MRAC
模型参考自适应控制(Model Reference Adaptive Control,简称MRAC)是一种在控制系统中使用自适应滤波器的方法。
它可以通过参考模型和误差信号之间的关系来适应系统的参数,以实现对系统的控制和调整。
二、研究内容
本研究将分别研究自适应IIR滤波器和线性自适应逆的MRAC两个方面,具体内容如下:
2.1 自适应IIR滤波器的研究
自适应IIR滤波器是一种自适应数字滤波器,它基于反馈和前馈结构,能够处理实时信号。
本研究将研究自适应IIR滤波器的设计方法和实现技术,并通过实验验证其性能和有效性。
2.2 线性自适应逆的MRAC的研究
线性自适应逆是一种基于MRAC理论的控制方法,通过自适应滤波器对误差信号进行处理,从而实现对控制系统的调整。
本研究将探讨线
性自适应逆的MRAC的原理和实现技术,并通过仿真实验验证其控制效
果和稳定性。
三、研究意义
本研究的意义在于对自适应滤波器和MRAC控制方法进行深入的研
究和探索,为数字信号处理和控制系统的设计提供了新的思路和方法。
同时,本研究的成果也可应用于实际的工程领域,如通讯、音频、视频、航空、汽车等领域,具有广泛的应用价值和社会意义。
自适应滤波器课程设计
自适应滤波器课程设计一、课程目标知识目标:1. 理解自适应滤波器的基本概念,掌握其工作原理和应用领域;2. 学会推导自适应滤波器的算法,并能运用相关理论知识分析滤波性能;3. 了解自适应滤波器在信号处理、通信等领域的实际应用。
技能目标:1. 能够运用所学知识设计简单的自适应滤波器,完成特定信号的处理任务;2. 掌握使用编程软件(如MATLAB)进行自适应滤波器仿真实验,提高实际操作能力;3. 培养独立分析问题、解决问题的能力,提高团队协作和沟通表达能力。
情感态度价值观目标:1. 培养学生对信号处理领域的兴趣,激发学生主动探索科学问题的热情;2. 培养学生严谨、认真的学习态度,养成勤奋刻苦的学习习惯;3. 增强学生的国家使命感和社会责任感,使其认识到自适应滤波器在我国科技发展中的重要作用。
本课程针对高年级本科生,结合课程性质、学生特点和教学要求,将课程目标分解为具体的学习成果。
在教学过程中,注重理论与实践相结合,提高学生的实际操作能力,培养学生解决实际问题的能力。
通过本课程的学习,使学生能够掌握自适应滤波器的核心知识,为未来从事相关领域的研究和工作打下坚实基础。
二、教学内容1. 自适应滤波器基本概念:滤波器分类、自适应滤波器的定义及其与传统滤波器的区别;2. 自适应滤波器原理:线性最小均方(LMS)算法、递推最小均方(RLS)算法、归一化算法等;3. 自适应滤波器的应用:信号处理、通信、语音识别等领域;4. 自适应滤波器设计:基于MATLAB工具箱的滤波器设计流程及参数配置;5. 自适应滤波器性能分析:收敛性分析、计算复杂度分析、数值稳定性分析;6. 实践教学:设计并实现一个简单的自适应滤波器,完成特定信号处理任务。
教学内容按照以下进度安排:1. 第1周:自适应滤波器基本概念,教材第1章;2. 第2周:自适应滤波器原理,教材第2章;3. 第3周:自适应滤波器的应用,教材第3章;4. 第4周:自适应滤波器设计,教材第4章;5. 第5周:自适应滤波器性能分析,教材第5章;6. 第6周:实践教学,结合教材第4章和第5章内容进行。
自适应滤波器的设计开题报告
自适应滤波器的设计开题报告Title: Design of Adaptive Filters1. Introduction- Background: Adaptive filters are widely used in signal processing to enhance the quality of signals by reducing noise and interference.- Objectives: The objective of this project is to design an adaptive filter that can adjust its parameters based on the input signals to achieve optimal noise reduction.2. Literature Review- Overview of Adaptive Filters: Explain the concept of adaptive filters and their applications in various fields.- Filter Design Techniques: Discuss different filter design techniques, such as the least mean squares (LMS) algorithm, recursive least squares (RLS) algorithm, and the normalized least mean squares (NLMS) algorithm.- Previous Works: Provide an overview of previous research on adaptive filter design, highlighting key findings and limitations.3. Methodology- Filter Structures: Discuss different filter structures, including Finite Impulse Response (FIR) and Infinite Impulse Response (IIR) filters.- Parameter Estimation: Explain how the adaptive filter iteratively estimates the filter coefficients based on the input signals.4. Implementation- Simulations: Describe the simulation environment and the parameters used in the experiments.- Data Processing: Explain how the input signals are preprocessed to remove artifacts and prepare them for filtering.- Algorithm Implementation: Present the implementation details of the chosen adaptive filter algorithm.5. Results and Discussion- Present the results obtained from the simulations, including signal-to-noise ratio improvement and any trade-offs observed.- Address any challenges faced during the design and provide possible solutions for future improvements.6. Conclusion- Summarize the main findings of the project and discuss the achievements in designing an adaptive filter.- Reflect on the limitations and potential future research directions for further improvement.7. References- Cite the relevant literature and resources consulted throughout the report.Note: The word count provided in this outline is approximately 430 words. To achieve the required 1500+ word document, additional details, elaboration, and analysis should be included in each section. The report should follow a logical flow, and appropriate figures, tables, and equations can be included to support the content presented.。
(完整版)基于DSP的FIR滤波器的设计与实现开题报告
题系: 专毕业设计(论文)开题报告目: 基于DSP的FIR滤波器的设计和实现业:学生姓名: 学号: 指导教师:开题报告填写要求1.开题报告(含“文献综述” )作为毕业设计(论文)答辩委员会对学生答辩资格审查的依据材料之一。
此报告应在指导教师指导下,由学生在毕业设计(论文)工作前期内完成,经指导教师签署意见及所在专业审查后生效。
2.开题报告内容必须用黑墨水笔工整书写或按此电子文档标准格式(可从电气系网页或各教研室FTB上下载)打印,禁止打印在其它纸上后剪贴,完成后应及时交给指导教师签署意见。
3.“文献综述” 应按论文的格式成文,并直接书写(或打印)在本开题报告第一栏目内,学生写文献综述的参考文献应不少于15 篇(不包括辞典、手册),其中至少应包括1 篇外文资料;对于重要的参考文献应附原件复印件,作为附件装订在开题报告的最后。
4.统一用A4 纸,并装订单独成册,随《毕业设计说明书》等资料装入文件袋中。
毕业设计(论文)开题报告1.文献综述:结合毕业设计(论文)课题情况,根据所查阅的文献资料, 每人撰写2500字左右的文献综述,文后应列出所查阅的文献资料。
文献综述在信号处理过程中,所处理的信号往往混有噪声,从接收到的信号中消除和减弱噪声是信号传输和处理中十分重要的问题。
根据有用信号和噪声的不同特性,提取有用心好的过程成为滤波,实现滤波功能的系统成为滤波器。
在1960年到1970年十年中,高速数字计算机迅速发展,并被广泛地用来处理数字形式的电信号。
因而,在数字滤波器的设计中,就有可能采用傅立叶分析、波形抽样、Z变换等已有的基本理论概念。
数字滤波器精确度高,使用灵活,可靠性高,具有模拟设备没有的许多优点,已广泛地应用于各个科学技术领域,例如数字电视,语音,通信,雷达,声纳,遥感,图像,生物医学以及许多工程应用领域。
随着信息时代、数字时代的到来,数字滤波技术已成为一门极其重要的科学和技术领域。
以往滤波器采用模拟电路技术,但是模拟技术存在很多难以解决的问题,而采用数字则避免很多类似的难题,当然数字滤波器在其他方面也有很多突出的优点都是模拟技术所不能及的,所以采用数字滤波器对信号进行处理是目前的发展方向。
基于自适应格型滤波算法的柴油机振动主动控制技术研究的开题报告

基于自适应格型滤波算法的柴油机振动主动控制技术研究的开题报告一、选题背景及意义柴油机是常见的工业用发动机,其工作时会产生大量振动和噪声,严重影响其稳定性和舒适性。
为了提高柴油机的工作质量,降低噪声和振动,并满足环保要求,需要对柴油机进行振动控制技术研究。
现代振动控制技术采用主动控制的方法,即采用主动振动控制器对振动进行消除,形成反向激振力,控制振动的传播和发生。
二、研究内容和研究方法本文针对柴油机的振动主动控制技术进行研究,提出了一种基于自适应格型滤波算法的振动控制方法。
自适应格型滤波器具有较好的自适应性和实时性,在实际应用中能够快速适应各种复杂环境的振动控制。
该方法首先对柴油机振动信号进行采集和处理,然后设计自适应格型滤波器参数,对振动进行主动控制,实现振动的消除和控制。
三、预期研究成果通过本研究,预计能够实现对柴油机振动的主动控制,消除振动和噪声,提高柴油机的稳定性和舒适性。
首先,设计和实现自适应格型滤波算法,并通过实验验证其对振动的控制效果;其次,研究和分析所设计的自适应格型滤波算法在不同工况下的应用性能和稳定性;最后,提出改进方案和优化策略,完善柴油机振动主动控制技术。
四、进度及计划安排第一阶段:文献调研,了解主动振动控制技术及自适应格型滤波算法理论和应用现状,研究柴油机的振动控制问题;第二阶段:确定自适应格型滤波算法的设计方案,对柴油机振动信号进行采集和处理,并进行实验验证;第三阶段:分析算法的应用性能和稳定性,研究改进方案和优化策略;第四阶段:撰写论文和答辩准备。
五、研究的可能创新点和不确定性1.本研究提出的基于自适应格型滤波算法的振动控制方法,在实际控制中具有良好的实时性和自适应性,能够更好地满足柴油机振动控制的要求;2.算法的稳定性和控制性能需要进行充分的实验验证和分析,确定其在不同工况下的适用性。
自适应滤波器的设计
一、 实验题目自适应滤波器的设计二、 实验要求产生一个含有噪声的语音信号,使其通过一个自适应滤波器,观察其结果并分析此滤波器的性能。
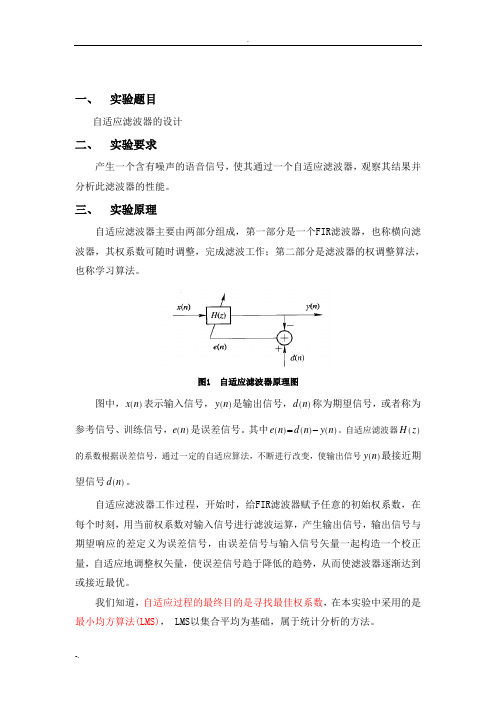
三、 实验原理自适应滤波器主要由两部分组成,第一部分是一个FIR 滤波器,也称横向滤波器,其权系数可随时调整,完成滤波工作;第二部分是滤波器的权调整算法,也称学习算法。
图1 自适应滤波器原理图图中,()x n 表示输入信号,()y n 是输出信号,()d n 称为期望信号,或者称为参考信号、训练信号,()e n 是误差信号。
其中()()()e n d n y n =-。
自适应滤波器()H z 的系数根据误差信号,通过一定的自适应算法,不断进行改变,使输出信号()y n 最接近期望信号()d n 。
自适应滤波器工作过程,开始时,给FIR 滤波器赋予任意的初始权系数,在每个时刻,用当前权系数对输入信号进行滤波运算,产生输出信号,输出信号与期望响应的差定义为误差信号,由误差信号与输入信号矢量一起构造一个校正量,自适应地调整权矢量,使误差信号趋于降低的趋势,从而使滤波器逐渐达到或接近最优。
我们知道,自适应过程的最终目的是寻找最佳权系数,在本实验中采用的是最小均方算法(LMS), LMS 以集合平均为基础,属于统计分析的方法。
LMS(Least mean square)算法是Widrow 等人提出的,是用梯度的估计值代替梯度的精确值,算法简便易行,获得了广泛的应用。
但存在收敛速度慢,有额外误差等缺点。
1、LMS 算法的权值计算梯度估计值用一条样本曲线进行计算。
2222212,Tj j j j j j N de e e e e d ωωωω⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦∂∂∂∇=∇==∂∂∂⌒,…,因为T j j j e d w x =- 所以22212,Tj j j j N e e e x ωωω⎡⎤⎢⎥-⎢⎥⎢⎥⎣⎦∂∂∂=∂∂∂,…,222122,Tj j j j j N e e e e ωωω⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦∂∂∂∇=∂∂∂⌒,…,2j j j e x ∇=-⌒用j ∇⌒代替j ∇得 12j j j j w w e xμ+=+ FIR 滤波器中第i 个权系数的计算公式为,,1,2j i j j i j i w w e x μ+=+FIR 滤波器中第i 个权系数的控制电路如图图2 FIR 第i 个去路的控制电路2、LMS 算法加权矢量的过渡过程将误差公式T j j j e d w x =-代入,,1,2j i j j i j i w w e x μ+=+得,1,2T j i j j j j j j i w w x d x x w μ⎡⎤+⎢⎥⎣⎦=+-22T j j j j j I x x w x d μμ⎡⎤⎢⎥⎣⎦=-+ 假设j w 和j x 不相关,对,,1,2j i j j i j i w w e x μ+=+取统计平均得,*122xx xx j j E w I R E w R w μμ⎡⎤⎡⎤⎡⎤+⎢⎥+⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦=- 类似于最陡下降法的推导,经坐标平移和旋转,变换到'v 坐标中。
基于自适应流形滤波的边缘感知编辑的开题报告
基于自适应流形滤波的边缘感知编辑的开题报告一、课题背景和意义随着计算机视觉技术的发展和广泛应用,图像和视频编辑越来越重要,特别是在电影、广告、游戏等创意产业中。
图像和视频编辑可以使人们改变某些图像和视频的外观,例如添加滤镜、改变色彩、调整对比度等。
这些编辑操作可以在很大程度上改善图像和视频的质量和美观度。
边缘是图像和视频中最重要的特征之一,边缘感知编辑是一种通过改变边缘来实现编辑的技术。
然而,传统的边缘感知编辑方法常常会出现模糊、不自然等问题,这些问题往往被称为“边缘保持问题”。
自适应流形滤波已经被证明在图像和视频编辑中非常有效,因为它可以在滤波边缘附近分别处理图像和视频的低频和高频信号。
此外,自适应流形滤波还可以通过压缩和分离数据来提高滤波效率。
因此,本课题旨在将自适应流形滤波技术应用于边缘感知编辑中,以解决传统方法中存在的问题,并提高边缘感知编辑的效率和质量。
二、研究内容和方法本课题将研究以下内容和方法:1. 自适应流形滤波在图像和视频编辑中的应用。
2. 基于自适应流形滤波的边缘感知编辑算法设计,包括边缘检测、边缘增强、滤波和重建等步骤。
3. 采用多种评估指标对算法进行评估和优化,包括图像和视频质量、边缘质量、处理时间等。
4. 在不同场景下进行实验验证,例如图像和视频的降噪、增强、超分辨率等任务。
三、预期成果和创新点预期的成果包括:1. 基于自适应流形滤波的边缘感知编辑算法的设计和实现。
2. 对算法在图像和视频质量、边缘质量、处理时间等方面的评估结果。
3. 多个应用场景下的实验验证结果。
本课题的创新点包括:1. 将自适应流形滤波技术应用于边缘感知编辑中,以提高其效率和质量。
2. 提出了一种基于自适应流形滤波的边缘感知编辑算法,解决了传统方法中存在的问题。
3. 对算法进行了全面的评估和优化,以确保其在不同场景下的有效性和可靠性。
四、可行性分析本课题的可行性分析如下:1. 自适应流形滤波技术已经被证明在多个应用领域中非常有效,例如图像和视频处理、计算机视觉、机器学习等。
自适应性滤波实验报告
DSP课程设计实验报告自适应滤波的DSP实现学院:电子信息工程学院老师:钱满义老师班级:通信0606设计者:张健亮学号:06211181张萌学号:06211183电话:51689510DSP课程设计——自适滤波的DSP实现一、DSP课程设计目的(1)学习、掌握5402DSP片上外设直接存储器访问控制器DMA的结构与配置;(2)了解DSPLIB中的DLMS自适应滤波的使用,并学会调用54xdsp库中现有的常用函数;(3)了解自适应滤波器的原理,熟悉LMS算法;(4)了解DSP对自适应滤波器的设计及编程方法;(5)学会实时采集数据和信号提取方法;(6)熟悉对自适应滤波器的软件和硬件调试方法。
二、DSP课程设计要求及目标利用DSP实时地对信号进行自适应滤波。
DSP利用直接存储器访问方式DMA采集数据时不打扰CPU,CPU可以对信号进行实时地滤波。
本设计要求利用DSP的DMA方式进行信号采集和信号输出,同时对外部输入的信号进行数字滤波。
首先完成自适应滤波器需要使用自适应算法(LMS算法)的编程与实现,通过对未知系统传递函数的建模,识别该未知系统,并对该系统进行噪声滤波。
实际中利用信号发生器产生一个或几个带噪声的正弦信号,其信号的频率、幅值以及相位都是变化的,通过自适应算法,实时跟踪该信号的变化,并将噪声滤去。
设计要求及目标如下:(1)对DMA进行初始化;(2)对A/D、D/A进行初始化;(3)编写DMA通道传输程序,实现数据实时采集和实时地输出;(4)设计子自适应滤波算法,或调用DSPLIB中的自适应函数,实现对信号的自适应波;(5)滤波后信号实时输出的同时,将数据存放在数据文件中;(6)利用自适应滤波实现语音信号回波对消。
三、自适应滤波原理1、自适应滤波概述:数字信号处理(DSP)是利用计算机或专用处理设备,以数字形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等处理,以得到符合人们所需要的信号形式。
自适应滤波器设计分析
自适应滤波器设计分析自适应滤波器是一种能够根据输入信号动态调整滤波器参数的滤波器,可以用于信号处理、通信系统、自适应控制等领域。
其主要思想是根据输入信号与期望输出信号之间的差异来调整滤波器的参数,从而实现对输入信号的有效滤波,提高信号质量和系统性能。
1.自适应滤波器的原理:自适应滤波器的原理是基于自适应信号处理的基本思想,即通过不断调整滤波器参数来使得滤波器的输出与期望输出之间的差异最小化。
常见的自适应滤波器算法有最小均方误差(LMS)算法、最小二乘(LS)算法、递归最小二乘(RLS)算法等。
2.自适应滤波器的性能指标:自适应滤波器的性能可以通过误差信号的均方误差来评价,即滤波器输出与期望输出之间的误差的二次平均值。
此外,自适应滤波器的收敛速度也是一个重要的性能指标,即滤波器能够多快地调整到最佳参数值。
3.自适应滤波器的应用:自适应滤波器可以应用于很多领域,比如智能手机中的降噪算法、语音识别系统中的语音增强算法、智能监控系统中的运动检测算法等。
不同应用场景下,自适应滤波器的设计方法和参数设置也会有所不同。
4.自适应滤波器的设计步骤:自适应滤波器的设计一般可以分为以下几个步骤:首先,确定输入信号和期望输出信号;然后,选择适当的自适应滤波器算法和滤波器结构;接着,初始化滤波器参数,并根据输入信号和期望输出信号来不断调整滤波器参数;最后,检验滤波器的性能,并根据需要进行调整和改进。
5.自适应滤波器的优缺点:自适应滤波器的优点是可以根据输入信号的变化来自动调整滤波器参数,从而适应不同的信号环境和系统要求;缺点是需要大量的计算和存储资源,对处理速度要求高,同时,滤波器的性能也会受到系统误差、信号相关性等因素的影响。
在自适应滤波器设计分析中,需要结合具体的应用场景和需求来选择合适的自适应滤波器算法和参数设置,并进行性能评估和调优。
同时,还需要考虑实际系统的计算和存储资源限制,以及对处理速度和滤波器性能的要求。
自适应滤波实验报告
LMS 自适应滤波实验报告姓名: 学号: 日期:2015.12.2实验内容:利用自适应滤波法研究从宽带信号中提取单频信号的方法。
设()()()()t f B t f A t s t x 212cos 2cos πϕπ+++=,()t s 是宽带信号,A ,B ,1f ,2f ,ϕ任选(1)要求提取两个单频信号;(2)设f f f ∆+=12,要求提取单频信号()t f 22cos π,研究f ∆的大小对提取单频信号的影响。
1. 自适应滤波器原理自适应滤波器理论是现代信号处理技术的重要组成部分,它对复杂信号的处理具有独特的功能。
自适应滤波器在信号处理中属于随机信号处理的范畴。
在一些信号和噪声特性无法预知或他们是随时间变化的情况下,自适应滤波器通过自适应滤波算法调整滤波器系数,使得滤波器的特性随信号和噪声的变化,以达到最优滤波的效果,解决了固定全系数的维纳滤器和卡尔曼滤波器的不足。
(1) 自适应横向滤波器所谓自适应滤波,就是利用前一时刻已获得的滤波器参数等结果,自动调节现时刻的滤波器参数,以适应信号和噪声未知或随时间变化的统计特性,从而实现最优滤波。
自适应滤波器由两个部分组成:滤波器结构和调节滤波器系数的自适应算法。
自适应滤波器的特点是自动调节自身的冲激响应,达到最优滤波,此算法适用于平稳和非平稳随机信号,并且不要求知道信号和噪声的统计特性。
一个单输入的横向自适应滤波器的原理框图如图所示:实际上这种单输入系统就是一个FIR 网络结构,其输出()n y 用滤波器单位脉冲响应表示成下式:()()()∑-=-=1N m m n x m w n y这里()n w 称为滤波器单位脉冲响应,令:()()n i n x x i w w m i i i ,1,1,1+-=-=+=用j 表示,上式可以写成∑==Ni ij i j x w y 1这里i w 也称为滤波器加权系数。
用上面公式表示其输出,适用于自适应线性组合器,也适用于FIR 滤波器。
自适应滤波报告
自适应滤波作业二1引言1.1编写目的自适应滤波是近30年以来发展起来的一种最佳滤波方法。
它是在维纳滤波,kalman滤波等线性滤波基础上发展起来的一种最佳滤波方法。
由于它具有更强的适应性和更优的滤波性能。
从而在工程实际中,尤其在信息处理技术中得到广泛的应用。
自适应滤波的研究对象是具有不确定的系统或信息过程。
“不确定”是指所研究的处理信息过程及其环境的数学模型不是完全确定的。
其中包含一些未知因数和随机因数。
任何一个实际的信息过程都具有不同程度的不确定性,这些不确定性有时表现在过程内部,有时表现在过程外部。
从过程内部来讲,描述研究对象即信息动态过程的数学模型的结构和参数是我们事先不知道的。
作为外部环境对信息过程的影响,可以等效地用扰动来表示,这些扰动通常是不可测的,它们可能是确定的,也可能是随机的。
此外一些测量噪音也是以不同的途径影响信息过程。
这些扰动和噪声的统计特性常常是未知的。
面对这些客观存在的各种不确定性,如何综合处理信息过程,并使某一些指定的性能指标达到最优或近似最优,这就是自适应滤波所要解决的问题。
在工程实际中,经常会遇到强噪声背景中的微弱信号检测问题。
例如在超声波无损检测领域,因传输介质的不均匀等因素导致有用信号与高噪声信号迭加在一起。
被埋藏在强背景噪声中的有用信号通常微弱而不稳定,而背景噪声往往又是非平稳的和随时间变化的,此时很难用传统方法来解决噪声背景中的信号提取问题。
自适应噪声抵消技术是一种有效降噪的方法,当系统能提供良好的参考信号时,可获得很好的提取效果。
与传统的平均迭加方法相比采用自适应平均处理方法还能降低样本数量。
1955-1966年期间美国通用公司在研制天线的过程中,为抑制旁瓣由windows和hoff在60年代初提出了基本LMS算法]1[。
LMS算法是1960年由Widrow和Hoff提出的最小均方误差(LMS)算法,LMS算法是基于估计梯度的最速下降算法的,由于采用粗糙的梯度估计值得到的,从而其算法性能欠佳,应用范围受限,但是因为其具有计算量小、易于实现等优点而在实践中被广泛采用。
自适应滤波实验报告
自适应滤波实验报告一、实验目的1.了解自适应滤波的原理和应用。
2.通过实验,验证自适应滤波算法在信号处理中的有效性。
二、实验器材与设备1.计算机2.数学软件MATLAB三、实验原理\[ W(k+1) = W(k) + \mu \cdot e(k) \cdot X(k) \]其中,W(k+1)为更新后的滤波器权值,W(k)为上一次的滤波器权值,μ为步长,e(k)为期望输出信号与实际输出信号的误差,X(k)为输入信号。
四、实验步骤1.准备实验所需的输入信号和期望输出信号。
通过MATLAB生成不同噪声水平的输入信号,并对其进行自适应滤波得到对应的期望输出信号。
2.设置自适应滤波算法的参数,包括滤波器的初始权值、步长等。
3.利用MATLAB实现自适应滤波算法,计算滤波器的权值。
4.将输入信号通过自适应滤波器,得到实际输出信号。
5.计算期望输出信号与实际输出信号之间的均方误差,并与预期结果进行比较。
五、实验结果与分析根据实验结果,期望输出信号与实际输出信号之间的均方误差随着迭代次数的增加逐渐减小,说明自适应滤波算法能够较好地逼近期望输出信号。
通过调整步长参数,可以控制自适应滤波算法的收敛速度和稳定性。
步长过大可能导致算法发散,步长过小可能导致算法收敛速度过慢。
因此,在应用自适应滤波算法时,需要根据具体情况选择合适的步长。
六、实验总结实验结果表明,自适应滤波算法能够有效地逼近期望输出信号,并能够通过调整步长参数来控制算法的收敛速度和稳定性。
在实际应用中,需要根据具体情况选择合适的步长参数,以达到最佳的滤波效果。
在今后的研究中,可以进一步探索其他自适应滤波算法,并通过实验验证其在信号处理中的有效性。
此外,还可以考虑将自适应滤波算法用于其他领域的信号处理问题,进一步拓展其应用范围。
自适应滤波器的设计开题报告
自适应滤波器的设计开题报告【开题报告】一、选题的背景和意义自适应滤波器是一种根据输入信号自动调整滤波器参数的滤波器。
在实际应用中,数据往往受到噪声的影响,而自适应滤波器可以通过自动调整参数,提高滤波效果,降低噪声对信号的干扰。
因此,自适应滤波器在信号处理领域中有着广泛的应用,并且有着重要的理论和实践意义。
二、选题的现状和存在的问题目前,自适应滤波器的设计已经有了较为成熟的理论和方法。
最常用的自适应滤波器算法包括最小均方误差(LMS)算法和最小二乘(LS)算法等。
然而,在实际应用中,自适应滤波器仍然存在一些问题。
首先,不同的自适应滤波器算法对输入信号的要求和处理效果不同,选择合适的自适应滤波器算法对于滤波效果至关重要。
其次,自适应滤波器的参数调节也需要一定的方法和策略,以确保滤波器的性能得到最大化。
三、选题的目的和内容本课题旨在研究和设计一种针对特定应用场景的自适应滤波器,通过选择合适的自适应滤波器算法和参数调节策略,提高滤波器的性能和鲁棒性,实现对输入信号的有效滤波和噪声抑制。
具体的内容包括以下几方面:1.研究不同的自适应滤波器算法,包括最小均方误差(LMS)算法和最小二乘(LS)算法等。
2.分析自适应滤波器在不同应用场景下的滤波效果和性能要求,选择适合的自适应滤波器算法。
3.设计合适的参数调节策略,通过自适应调整滤波器参数,提高滤波器的性能和鲁棒性。
4.实验验证设计的自适应滤波器在特定应用场景下的滤波效果和性能表现。
四、选题的研究方法和技术路线本课题的研究方法和技术路线如下:1.查阅文献,了解自适应滤波器的基本原理和常用算法。
2.研究并比较不同的自适应滤波器算法,包括最小均方误差(LMS)算法和最小二乘(LS)算法等,分析其优缺点和适用场景。
3.根据研究结果,选择合适的自适应滤波器算法,并进一步设计合适的参数调节策略。
4.利用MATLAB等工具进行仿真实验,验证和评估所设计的自适应滤波器的性能和鲁棒性。
自适应滤波器的设计开题报告范文
长江大学毕业设计开题报告题目名称自适应滤波器的设计与应用学院电信学院专业班级信工10702班学生姓名李雪利指导教师王圆妹老师辅导教师王圆妹老师开题报告日期 2010年3月19日自适应滤波器的设计与应用学生:李雪利,长江大学电子信息学院指导教师:王圆妹,长江大学电子信息学院一、题目来源来源于其他二、研究目的和意义滤波技术在当今信息处理领域中有着极其重要的应用。
滤波是从连续的或离散的输入数据中除去噪音和干扰以提取有用信息的过程,相应的装置就称为滤波器。
滤波器实际上是一种选频系统,他对某些频率的信号予以很小的衰减,使该部分信号顺利通过。
而对其他不需要的频率信号予以很大的衰减,尽可能阻止这些信号通过。
滤波器研究的一个目的就是:如何设计和制造最佳的(或最优的)滤波器。
在数字信号处理中,数字滤波是语音和图像处理、模式识别、频谱分析等应用中的一个基本处理算法。
在许多应用场合,由于无法预先知道信号和噪声的特性或者它们是随时间变化的,仅仅用 FIR 和 IIR两种具有固定滤波系数的滤波器无法实现最优滤波。
在这种情况下,必须设计自适应滤波器,以跟踪信号和噪声的变化。
自适应滤波器是利用前一时刻已获得的滤波器参数,自动地调节、更新现时刻的滤波器参数,以适应信号和噪声未知的统计特性,从而实现最优滤波。
当在未知统计特性的环境下处理观测信号时,利用自适应滤波器可以获得令人满意的效果,其性能远超过通用方法所设计的固定参数滤波器。
三、阅读的主要参考文献及资料名称1、《数字信号处理》刘益成(第二版)西安电子科技出版社2、《数字信号处理》张小虹(第二版)机械工业出版社3、自适应信号处理[M].西安:西安电子科技大学出版社,2001.4.邹理和,数字信号处理, 国防工业出版社,19855.丁玉美等, 数字信号处理,西安电子科技大学出版社,19996.程佩青, 数字信号处理,清华大学出版社,20017. The MathWorks Inc, Signal Processing Toolbox For Use withMATLAB, Sept. 20008. vinay K.Ingle, John G.Proakis,数字信号处理及MATLAB实现,陈怀琛等译,电子工业出版社,1998.99、《MATLAB编程参考手册》10、中国期刊网的相关文献11、赫金,自适应滤波器原理第四版,西安工业出版社,2010-5-1四、国内外现状和发展趋势与主攻方向自适应滤波器的理论与技术是50年代末和60年代初发展起来的。
一种新型间角度走样自适应滤波器的开题报告
一种新型间角度走样自适应滤波器的开题报告标题:一种新型间角度走样自适应滤波器摘要:在数字信号处理中,由于采样频率的限制,经常出现信号在进入系统时发生了有损失的采样,导致信号出现走样的现象。
而走样信号的处理一直是数字信号处理领域内的研究热点之一。
本研究旨在提出一种新型间角度走样自适应滤波器,以提高对走样信号的滤波效果。
关键词:数字信号处理;走样;滤波器;自适应;间角度1.引言在信号采样的过程中,采样频率的限制会导致采样的信号出现损失,从而导致信号出现走样的现象。
这种走样会导致信号的频率分量发生混叠,在频谱上出现一些不想要的干扰信号。
这些干扰信号干扰了系统的稳定性,甚至会导致系统的误差增大。
所以,对走样信号的滤波处理一直是数字信号处理领域内的研究热点之一。
目前,常见的数字滤波器包括FIR滤波器、IIR滤波器等。
这些滤波器可以对信号进行滤波处理,但是对于有走样现象的信号,它们的滤波效果比较有限,需要提出新的滤波器来解决这个问题。
2.研究内容本研究旨在提出一种新型间角度走样自适应滤波器,以提高对走样信号的滤波效果。
间角度走样是走样信号的一种常见形式,它是由于采样时钟与信号周期之间的相位误差导致的。
本研究通过实验研究发现,传统的数字滤波器对间角度走样信号的滤波效果较差,而自适应滤波器可以根据信号特性自动调整滤波器的系数,从而提高滤波效果。
基于这一发现,本研究提出了一种新型自适应滤波器。
该滤波器可以动态地调整自身的参数,以适应不同类型的走样信号。
具体来说,该滤波器先对信号进行FFT变换,然后根据特定的算法确定滤波器的系数,从而实现对信号的滤波处理。
3.研究意义本研究的意义在于提供了一种新的滤波器结构,可以有效地消除走样信号的干扰,提高系统的稳定性和精度。
与传统的数字滤波器相比,该滤波器具有更好的自适应性能,可以自动调整滤波器的参数以适应不同类型的走样信号。
因此,该滤波器的应用前景非常广泛,比如在通信、图像处理、音频处理等领域都有很好的应用潜力。
自适应滤波器开题报告
自适应滤波器开题报告自适应滤波器开题报告一、引言自适应滤波器是一种能够根据输入信号的特性自动调整滤波参数的滤波器。
它具有广泛的应用领域,包括通信系统、图像处理、语音识别等。
本文将对自适应滤波器的原理、应用和研究现状进行探讨。
二、自适应滤波器原理自适应滤波器的核心思想是根据输入信号的统计特性,通过不断调整滤波器的参数,使得输出信号尽可能接近期望的信号。
其基本原理可以概括为以下几个步骤:1. 参数初始化:开始时,自适应滤波器的参数需要进行初始化,可以使用随机数或者根据经验设置初始值。
2. 误差计算:根据期望输出信号与实际输出信号之间的差异,计算误差信号。
3. 参数更新:根据误差信号和输入信号的相关性,通过适当的算法更新滤波器的参数。
4. 输出计算:使用更新后的参数,计算出新的输出信号。
5. 循环迭代:重复执行步骤2至步骤4,直到达到预设的收敛条件。
三、自适应滤波器的应用自适应滤波器在各个领域都有广泛的应用。
以下是几个常见的应用场景:1. 通信系统:在通信系统中,自适应滤波器可以用来消除信号传输过程中的噪声和干扰,提高信号的质量和可靠性。
2. 图像处理:在图像处理领域,自适应滤波器可以用来去除图像中的噪声、模糊和伪影,提高图像的清晰度和细节。
3. 语音识别:在语音识别系统中,自适应滤波器可以用来降低环境噪声对语音信号的影响,提高语音识别的准确性和可靠性。
四、自适应滤波器的研究现状自适应滤波器是一个活跃的研究领域,许多学者和研究人员致力于改进和优化自适应滤波器的性能和算法。
以下是一些当前研究的热点:1. 算法改进:研究人员提出了许多新的自适应滤波算法,如最小均方误差(LMS)算法、最小二乘(LS)算法、递归最小二乘(RLS)算法等。
这些算法在不同的应用场景中具有不同的性能优势。
2. 滤波器结构优化:除了算法改进,研究人员还致力于优化自适应滤波器的结构,以提高滤波器的运算速度和性能。
例如,研究人员提出了基于快速最小二乘(F-LS)算法的自适应滤波器结构,可以在保持较高性能的同时减少计算复杂度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自适应滤波器的设计与应用
一、题目来源
来源于其他
二、研究目的和意义
滤波技术在当今信息处理领域中有着极其重要的应用。
滤波是从连续的或离散的输入数据中除去噪音和干扰以提取有用信息的过程,相应的装置就称为滤波器。
滤波器实际上是一种选频系统,他对某些频率的信号予以很小的衰减,使该部分信号顺利通过。
而对其他不需要的频率信号予以很大的衰减,尽可能阻止这些信号通过。
滤波器研究的一个目的就是:如何设计和制造最佳的(或最优的)滤波器。
在数字信号处理中,数字滤波是语音和图像处理、模式识别、频谱分析等应用中的一个基本处理算法。
在许多应用场合,由于无法预先知道信号和噪声的特性或者它们是随时间变化的,仅仅用 FIR 和 IIR两种具有固定滤波系数的滤波器无法实现最优滤波。
在这种情况下,必须设计自适应滤波器,以跟踪信号和噪声的变化。
自适应滤波器是利用前一时刻已获得的滤波器参数,自动地调节、更新现时刻的滤波器参数,以适应信号和噪声未知的统计特性,从而实现最优滤波。
当在未知统计特性的环境下处理观测信号时,利用自适应滤波器可以获得令人满意的效果,其性能远超过通用方法所设计的固定参数滤波器。
三、阅读的主要参考文献及资料名称
1、《数字信号处理》刘益成(第二版)西安电子科技出版社
2、《数字信号处理》张小虹(第二版)机械工业出版社
3、自适应信号处理[M].西安:西安电子科技大学出版社,2001.
4.邹理和,数字信号处理, 国防工业出版社,1985
5.丁玉美等, 数字信号处理,西安电子科技大学出版社,1999
6.程佩青, 数字信号处理,清华大学出版社,2001
7. The MathWorks Inc, Signal Processing Toolbox For Use with
MATLAB, Sept. 2000
8. vinay K.Ingle, John G.Proakis,数字信号处理及MATLAB实现,陈怀琛等译,电子工业出版社,1998.9
9、《MATLAB编程参考手册》
10、中国期刊网的相关文献
11、赫金,自适应滤波器原理第四版,西安工业出版社,2010-5-1
四、国内外现状和发展趋势与主攻方向
自适应滤波器的理论与技术是50年代末和60年代初发展起来的。
它是现代信号处理技术的重要组成部分,对复杂信号的处理具有独特的功能。
自适应滤波器在数字滤波器中试属于随机数字信号处理的范畴。
对于随机数字信号的滤波处理,通常有维纳滤波,卡尔曼滤波和自适应滤波,维纳滤波的权系数是固定的,适用于平稳随机信号;卡尔曼滤波器的权系数是可变的,适用于非平稳随机信号中。
但是,只有在对信号和噪声的统计特性先验
已知的情况下,这两种滤波器才能获得最优滤波。
但在实际应用中,常常无法得到这些统计特性的先验知识,或者统计特性是随时间变化的。
阴齿,在许多情况下,用维纳滤波器或卡尔曼滤波器实现不了最优滤波,而自适应滤波却能够提供卓越的滤波性能。
传统的自适应滤波器主要在时域中实现, 采用抽头延迟线( tapped de lay li ne)结构及W IDROW - HOFF自适应LMS算法。
这种方法算法简单, 稳健性也比较好,因而被广泛应用。
但是滤波器的阶数可能会很高,步长系数可能会很小,收敛性能不理想, 对输入信号的自相关矩阵有很强的依赖性, 因而不具有高自适应率。
当输入信号的自相关矩阵的特征值分布发散度很大时, 算法的收敛速度很慢,跟踪性能不好。
许多学者对LMS算法进行了研究, 对传统LMS算法提出了许多有效的改进措施,如采用变步长LMS算法、变换域LMS 算法, 以及QR分解LMS算法等, 有效地克服了其性能局限性。
五、主要研究内容,需重点研究的关键问题及解决思路
5.1 研究内容:
1、自适应滤波算法的原理。
2、自适应滤波经典的算法。
3、MATLAB编程实现自适应滤波经典方法。
4、提出改进的自适应滤波的设计方法并编程实现,并与经典的
算法进行优缺点的比较。
5.2 研究的关键问题:
1、自适应滤波器的结构:
自适应滤波器的结构有 F I R和 II R 两种。
由于 II R滤波器存在稳定性的问题,因此一般采用FIR滤波器。
由于 FIR滤波器横向结构的算法具有容易实现和计算量少等优点, 在对线性相位要求不严格、收敛速度不是很快的场合,多采用 FI R作为自适应滤波器结构。
2、LMS算法的选取:
LMS算法使用的准则是使滤波器的期望输出值和实际输出值之间的均方误差最小化的准则,即使用均方误差来做性能指标.
3、LMS算法的分析:
步长μ:μ越大,自适应时间越短,自适应过程越快, 但它引起的失调也越大。
失调越小,但自适应过程也相应加长。
步长的选择应从整个系统要求出发, 在满足精度要求的前提下,尽量减少自适应时间。
阶数N:当阶数 N取值大时,迭代次数增加,收敛速度变快.但当阶数 N大到一定程度,收敛速度变化不明显,且可能引起系数迭代过程不收敛。
5.3解决思路:
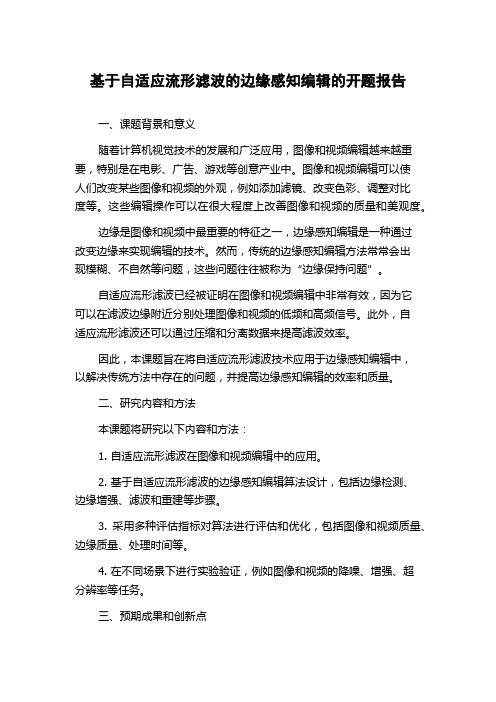
图一为自适应滤波器结构的一般形式,图中x(n)为输入信号,通过参数可调的数字滤波器后产生输出信号y(n),将输出信号y(n)与标准信号(或者为期望信号)d(n)进行比较,得到误差信号e(n) 。
e(n)和x(n)通过自适应算法对滤波器的参数进行调整,调整的目的使得误差信号e(n)的均方值最小。
参数可调滤波器一般选择FIR(有限冲击响应滤波器)滤波器,因其具有稳定性和线性相位两大优点
自适应算法选择LMS(最小均方误差)算法,LMS是一种以期望响应和滤波器输出信号之间误差的均方值最小为准则,其显著特点是简单、计算量小、易于实现。
但LMS的参数对其性能有一定的影响,尤其是步长的选取。
另一方面,梯度算法只有一个调整参数用来控制收敛速率,收敛慢正是由于这个基本的限制,为了避免滤波
器出现不稳定,步长可以由输入功率进行控制。
最后用 Matlab中的Simuli nk工具对设计的自适应滤波器进行模拟仿真。
六.完成毕业设计所必须具备的工作条件及解决的办法
1 、通过上网查找相关的资料、文献,了解相关技术的最新的发展方向和成果。
2 、图书馆查找相关基础知识的书面资料。
3 、向老师请教设计过程中所遇到的问题。
4 、通过电脑软件MATLAB进行程序设计及调试。
七、工作的主要阶段,进度与时间安排
2.21—
3.7日:联系指导教师,领取任务书并,完成开题报告和开题答辩。
3.8 —3.20日:文献调研初步工作,翻译相关的外文文献,。
3.21—
4.7 日:学习理论知识,复习及掌握MATLAB软件。
4.8 —
5.10:上网查阅相关文献资料及相关的程序块,仔细研究,与老师密切联系,。
5.20—
6.2日:写出论文初稿,交给指导老师评审。
6.5—6.9日:论文定稿、打印、装订,最终版本交指导老师;制作PPT文稿,准备答辩。
6.10日:完成答辩。
八、指导教师审查意见
签字:
年月日。