C534J1型双柱立式车床PLC系统控制设计 正文
基于PLC的组合机床控制系统设计

基于PLC的组合机床控制系统设计1引言可编程控制器(plc)是以微处理机为基础,综合了计算机技术、自动控制技术和通信技术等现代科技而发展起来的一种新型工业自动控制装置,其具有逻辑控制、计时、计数、数据处理、联网与通信等强大功能,同时,由于plc具有很高的可靠性和极大的应用灵活性,用它来替代传统的继电接触控制系统巳成为必然。
大量采用传统继电一接触控制系统的设备通过改造更新,成为plc控制的自动化系统,而且具有改造成本低、周期短和可靠性高等特点。
本文介绍双面单工位液压传动组合机床plc控制系统的设计与应用。
2组合机床的运动及控制要求组合机床指可同时进行多种或多处加工的机床,组合机床的加工动作常常是按预定的步骤安排的,类似于简单的程序控制,这也正是plc最擅长的。
双面单工位液压传动组合机床采用三台电动机进行拖动,m1、m2为左右动力头电动机,m3为冷却泵电动机,其对应的控制交流接触器分别为km1、km2、km3。
sa1为左动力头单独调整开关,sa2为右动力头单独调整开关,通过它们可实现左、右动力头的单独调整。
sa3为冷却泵电动机工作选择开关。
该机床的左、右动力头的工作循环如图1所示,电磁铁动作顺序表见表1。
图1动力头的工作循环图由图1和表1可知,组合机床为自动循环状态时,按下启动按钮后,左、右动力头电动机m1、m2同时旋转,按下“快进”按钮,电磁阀yv1、yv3通电,左、右动力头快速进给并离开原位,行程开关sq1、sq2、sq5、sq6先复位,行程sq3、sq4后复位。
当sq3、sq4复位后,在动力头进给过程中,靠各自行程阀自动变快进为工进,同时压下行程开关sq,冷却泵电动机m3工作,供给冷却液。
当左动力头加工完毕,将压下sq7并顶在死挡铁上,其油路油压升高使kp1动作,当右动力头加工完毕,将压下sq8并使kp2动作,yv2、yv4将通电,同时yv1、yv3也将失电,左、右动力头将快退。
当左动力头使sq复位后,冷却泵电动机将停转。
基于PLC的组合机床控制系统设计
基于PLC的组合机床控制系统设计摘要组合机床是一种集多种加工方式于一身的高端智能化设备。
本文基于PLC平台,设计和实现了一套组合机床控制系统,以实现多种加工方式的联合操作。
在系统设计中,首先对组合机床的结构和工作原理进行了详细分析和描述,随后选择合适的PLC控制器,根据系统控制需求,编写程序实现各种加工作业的自动控制和监控。
通过仿真实验,验证了系统的稳定性和实用性,结果表明该系统可以支持多种加工方式的组合操作,同时保证加工质量和工作效率的提高。
AbstractCombined machine tool is a high-end intelligent equipment that integrates multiple processing methods. Based on the PLC platform, this paper designs and implements a set of combined machine tool control system to realize the joint operation of multiple processing methods. In the system design, the structure and working principle of the combined machine tool are analyzed and described in detail. Then the appropriate PLC controller is selected, and the program is written according to the system control requirements to realize automatic control and monitoring of various processing tasks. Through simulation experiments, thestability and practicality of the system are verified. The results show that the system can support the combined operation of multiple processing methods while ensuring the improvement of processing quality and work efficiency.关键词:组合机床;PLC控制;加工质量;工作效率;仿真实验Keywords: combined machine tool; PLC control; processing quality; work efficiency; simulation experiment一、研究背景随着工业技术的快速发展,组合机床逐渐成为了制造业领域中的重要设备。
立式双柱坐标镗床PLC改造说明书毕业设计

摘要本论文是研究机械加工中常用的T4240B立式双柱坐标镗床传统电气控制系统的改造问题,旨在解决传统继电器——接触器电气控制系统存在的线路复杂、可靠性稳定性差、故障诊断和排除困难等难题。
由于PLC电气控制系统与继电器——接触器电气控制系统相比,具有结构简单,编程方便,调试周期短,可靠性高,抗干扰能力强,故障率低,对工作环境要求低等一系列优点。
因此,本论文对T4240B立式双柱坐标镗床电气控制系统的改造,将把PLC控制技术应用到改造方案中去,从而大大提高立式双柱坐标镗床的工作性能。
论文分析了立式双柱坐标镗床的控制原理,制定了可编程控制器改造T4240B立式双柱坐标镗床电气控制系统的设计方案,完成了电气控制系统硬件和软件的设计,其中包括PLC机型的选择、I/O端口的分配、I/O硬件接线图的绘制、PLC梯形图程序的设计。
对PLC控制立式双柱坐标镗床的工作过程作了详细阐述,论述了采用PLC取代传统继电器——接触器电气控制系统从而提高机床工作性能的方法,给出了相应的控制原理图。
关键词:可编程控制器,立式双柱坐标镗床,梯形图,电气控制系统Abstract: This paper is to studies the machine process in common use T4240B in inside vertical double column jig boring machine electric control system improves problem. The aim is solving device complexity, inferior reliability and stability, malfunction analysis and trouble obviation of the traditional relay electric control system. Because of electric control system PLC there are lots of advantages which include design, install, connect the line and adjust to try workload small, the period of research and manufacture is short, reliability is high, the ability of Anti-interference is very strong, the rate of break down is low, the demand of work environment is low, maintenance convenience a series of advantage etc. Therefore, a work for to the T4240B vertical double column jig boring machine electric control system reforming, will reforming PLC control technique application in the project, then increasing vertical double column jig boring machine’s work function. The paper introduces to the control principle of the vertical double column jig boring machine, Established the programmable controller improve the design project of electric control system of T4240B vertical double column jig boring machine. Completed the design of the software and hardware of the electric control system, Among them include the model of PLC choice、PLC trapezium diagram’s design, It explains that PLC control the work process of vertical double column jig boring machine, Discussing the adoption PLC replaces the traditional electric control system’s method and increases the work function of vertical double column jig boring machine, give a homologous control principle diagram.Key words: PLC, Vertical double column jig boring machine, Trapezium diagram, Electric Control System1. 绪论 (3)1.1 T4240B立式双柱坐标镗床PLC改造的背景和意义 (3)1.2国内外研究概况 (5)1. 绪论1.1T4240B立式双柱坐标镗床PLC改造的背景和意义我国工业企业的自动化程度普遍较低,PLC产品有很大的应用空间,如机械行业80%以上的设备仍采用传统的继电器和接触器进行控制。
三菱PLC在C534J立式车床改造中的应用

三菱PLC在C534J立式车床改造中的应用【摘要】为了提高机床加工精度和生产效率,本次设计所要解决的主要问题,是应用PLC技术改造了C534J双柱立式车床的电气控制系统。
主要是运用PLC 软件进行编程对主轴控制,左右两个刀架控制,横梁升降控制,横梁夹紧控制。
通过PLC技术改造,不但可简化控制线路,而且故障率低,可靠性能高,完全可满足该机床的加工要求。
【关键词】立式车床;PLC;改造Abstract:In order to improve the working accuracy and production efficiency of the machine.The problem solved in this design is mainly the electrical control units of model C534J is an universal vertical lathe with double columns can be changed by PLC program through technical e software PLC to carry on programming,spindle control,two turrets in left and right sides control,beam up down control,beam clamp control.By PLC program through technical innovation,therefore the ratio of repair will be reduced and the control circuits will be simplified,the need of machining requirements will be met entirely.Key words:Vertical lathe;PLC;Innovation由于机床的精度直接决定着产品的质量和效益;但多数企业的设备都比较陈旧,尤其电气控制系统由于多年使用,加上电气元件严重老化,从而严重影响机床动作的可靠性,但购买新设备投资较大,所以通过对机床改造,不但能解决上述问题,而且也减少企业投资费用。
基于PLC的组合机床控制系统设计毕业设计论文
基于PLC的组合机床控制系统设计第1章三面铣组合机床概述三面铣组合机床是用来进行铣销加工的一种自动加工设备,其作用对象是Z512W型台式钻床主轴箱的Ф80、Ф90孔端面及定位面。
1.1 组合机床概述1.1.1 组合机床发展史二十世纪70年代以来,随着可转位刀具、密齿铣刀、镗孔尺寸自动检测和刀具自动补偿技术的快速发展,组合机床的加工精度也有很大的提高。
铣削平面的平面度可达0.05毫米/1000毫米,表面粗糙度可低达2.5~0.63微米;镗孔精度可达IT7~6级,孔距精度可达O.03~O.02微米[1]。
随着汽车工业的兴起,专用机床也逐渐发展起来。
在专用机床中某些部件因重复使用,逐步发展成为通用部件,因而产生了组合机床。
最早的组合机床是1911年在美国制成的,用于加工汽车零件。
初期,各机床制造厂都有各自的通用部件标准。
为了便于用户使用和维修,提高不同制造厂的通用部件的互换性,美国福特汽车公司和通用汽车公司与美国机床制造厂于1953年协商,严格规定各部件间的联系尺寸,确定了组合机床通用部件标准化的原则,即但对部件结构未作规定。
1.1.2 组合机床部件分类组合机床通用部件按功能可分为五类。
动力部件主要有动力箱、切削头和动力滑台,是为组合机床提供主运动和进给运动的部件。
支承部件有侧底座、中间底座、支架、可调支架、立柱和立柱底座等,是用以安装动力滑台、带有进给机构的切削头或夹具等的部件。
输送部件主要有分度回转工作台、环形分度回转工作台、分度鼓轮和往复移动工作台等,是用以输送工件或主轴箱至加工工位的部件。
控制部件有液压站、电气柜和操纵台等,是用以控制机床的自动工作循环的部件。
辅助部件主要就是有润滑装置、冷却装置和排屑装置等。
1.2 组合机床的特点组合机床是用按一定规则和标准设计的通用部件以及按被加工零件的形状和工艺要求设计的专用部件组成的专用机床。
组合机车是由专用机床和万能机床发展来的,它结构简单,又能够重新调整,适应新工件的加工。
基于PLC的立体车库控制系统设计毕业设计

基于PLC的立体车库控制系统设计毕业设计随着科技的发展和城市化进程的加快,立体车库作为一种能够有效解决城市空间不足和车辆停放问题的设施,日益受到人们的。
而基于PLC(可编程逻辑控制器)的立体车库控制系统,能够实现高效、安全、智能的车辆存取,因此具有广泛的应用前景。
本文将探讨基于PLC的立体车库控制系统设计毕业设计的有关问题。
基于PLC的立体车库控制系统主要由PLC、传感器、升降电机、转向电机、编码器等组成。
其中,PLC作为主控制器,负责接收传感器信号,控制电机动作,并监测车库的运行状态。
在立体车库控制系统中,硬件的选型与配置是关键环节。
我们选用具有强大运算和控制能力的PLC作为主控制器,配合高性能的传感器、升降电机、转向电机和编码器,实现车库的智能化控制。
软件设计是立体车库控制系统的核心。
我们采用结构化编程方法,将程序分为输入、输出、中断、定时等模块,实现车辆的自动存取、车位状态监测、故障诊断等功能。
在完成硬件和软件设计后,我们将各部分进行集成,构建出一套完整的立体车库控制系统。
同时,我们编写了用户界面,方便用户进行操作和控制。
为验证立体车库控制系统的性能,我们进行了大量的测试。
测试结果表明,该系统能够准确感知车位状态,控制电机准确升降和转向,实现车辆的高效存取。
同时,系统运行稳定,具有良好的可靠性和安全性。
本文设计的基于PLC的立体车库控制系统实现了高效、安全、智能的车辆存取,解决了城市空间不足和车辆停放问题。
通过测试验证了系统的性能和可靠性。
该设计具有广泛的应用前景,为立体车库的发展提供了新的解决方案。
展望未来,随着科技的不断进步,立体车库将向着更加智能化、自动化的方向发展。
我们将继续研究新的控制策略和技术,提升立体车库的运行效率和服务质量,为城市的发展贡献力量。
随着社会的快速发展和城市汽车的普及,立体车库作为一种有效的停车解决方案,越来越受到人们的。
可编程逻辑控制器(PLC)作为一种自动化控制的核心器件,在立体车库控制系统中发挥着重要的作用。
C534J1双柱立车大修方案1

C534J1双柱立车大修方案一、机床状况及用户要求:1、机床状况:机床左右刀架间隙过大,主变箱部分轴承损坏、齿轮损坏、Ⅰ轴弯曲;左右走刀箱大部分走刀量无法使用;横梁导轨磨损严重;横梁升降丝杆螺母磨损严重;刀架丝、光杠弯曲、油路系统局部无油;机床电气线路老化。
2、用户要求:机械电气常规大修;二、周期:90天三、大修方案:1、拆前检查各项精度,进行记录。
调整工作台与横梁水平、车削工作台台面以消除内应力;2、工作台导轨板如磨损严重则更换,底座导轨磨损严重进行精车修复,然后进行配刮,达到几何精度要求,重新修整导轨油腔;3、工作台定心轴检查修复,配套进行刮研修复;4、调整工作台定心轴承;5、两立柱导轨面精刨磨、达到几何精度、导轨面压花处理;6、横梁导轨面精度刨磨、导轨导向面研刮,保证上拱要求;7、横梁导轨背面研刮,保证上薄下厚达到几何精度,配作锒条、压板;8、左右刀架滑板与横梁导轨配研,恢复几何精度,配作锒条、压板;9、刀架滑枕精磨达到要求,更换与其配合的衬板,并与滑枕配刮,恢复几何精度;10、修复刀架滑枕锥孔,更换滑枕传动丝杠、螺母及磨损件;11、主传动箱解体、检查、更换失效轴承;拨叉补焊、修复或更换;更换易损件、检查变速油缸活塞,修复或更换;12、左右刀架进给箱解体,检查、更换全部轴承、更换易损件及磨损件、更换失效电磁离合器;13、更换横梁左右升降丝杠、螺母及轴承,检查横梁升降机构,更换易损件;14、修复左右刀架滑板水平移动的丝杠,更换螺母及轴承。
检查传动齿轮,磨损件进行修复更换;15、检查、调整横梁夹紧装置、更换易损件;16、各箱体解体后,内部进行清洗、涂防锈漆;17、检查各液压系统,清洗油箱、更换失效液压元件;18、横梁、刀架润滑改为南京贝奇尔润滑系统;19、配齐各部手柄、手轮,并进行镀铬处理;20、机床整体油漆,颜色为武重绿;21、机床安装调试,各项精度检测提供验收报告;22、机床空试运转、试活;23、验收、交付生产使用;武汉机械贸易有限公司电话:传真:二○○六年十一月一日。
C534J双柱立车工作台控制系统的改造
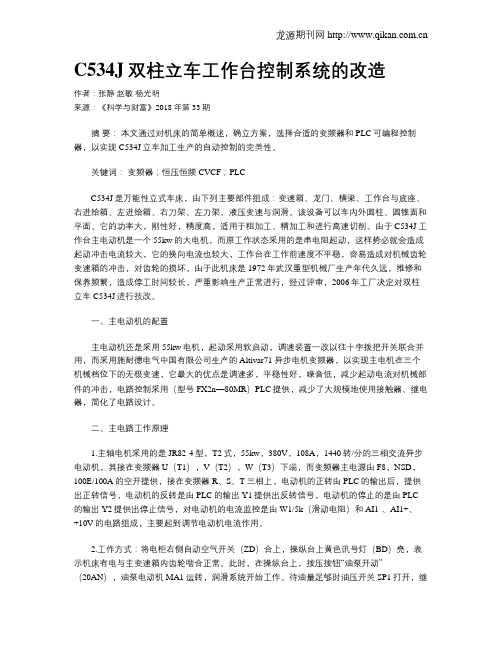
C534J双柱立车工作台控制系统的改造作者:张静赵敏杨光明来源:《科学与财富》2018年第33期摘要:本文通过对机床的简单概述,确立方案,选择合适的变频器和PLC可编程控制器,以实现C534J立车加工生产的自动控制的完美性。
关键词:变频器;恒压恒频CVCF;PLCC534J是万能性立式车床,由下列主要部件组成:变速箱、龙门、横梁、工作台与底座、右进给箱、左进给箱、右刀架、左刀架、液压变速与润滑。
该设备可以车内外圆柱、圆锥面和平面。
它的功率大,刚性好,精度高,适用于粗加工、精加工和进行高速切削。
由于C534J工作台主电动机是一个55kw的大电机,而原工作状态采用的是串电阻起动,这样势必就会造成起动冲击电流较大,它的换向电流也较大,工作台在工作前速度不平稳,容易造成对机械齿轮变速箱的冲击,对齿轮的损坏,由于此机床是1972年武汉重型机械厂生产年代久远,维修和保养频繁,造成停工时间较长,严重影响生产正常进行,经过评审,2006年工厂决定对双柱立车C534J进行技改。
一、主电动机的配置主电动机还是采用55kw电机,起动采用软启动,调速装置一改以往十字拨把开关联合并用,而采用施耐德电气中国有限公司生产的Altivar71异步电机变频器,以实现主电机在三个机械档位下的无极变速,它最大的优点是调速多,平稳性好,噪音低,减少起动电流对机械部件的冲击,电路控制采用(型号FX2n—80MR)PLC提供,减少了大规模地使用接触器、继电器,简化了电路设计。
二、主电路工作原理1.主轴电机采用的是JR82-4型,T2式,55kw,380V,108A,1440转/分的三相交流异步电动机,其接在变频器U(T1),V(T2),W(T3)下端,而变频器主电源由F8,NSD,100E/100A的空开提供,接在变频器R、S、T三相上,电动机的正转由PLC的输出后,提供出正转信号,电动机的反转是由PLC的输出Y1提供出反转信号,电动机的停止的是由PLC 的输出Y2提供出停止信号,对电动机的电流监控是由W1/5k(滑动电阻)和AI1-、AI1+、+10V的电路组成,主要起到调节电动机电流作用。
四工位组合机床的plc控制系统设计 正文

正文第一章绪论一、组合机床概述组合机床是针对特定工件,进行特定加工而设计的一种高效率自动化专用加工设备,这类设备大多能多刀同时工作,并且具有自动循环的功能。
组合机床是随着机械工业的不断发展,由通用机床、专用机床发展起来的。
通用机床一般用一把刀具进行加工,自动化程度低、辅助时间长、生产效率低,但通用机床能够重新调整,以适应加工对象的变化。
专用机床可以实现的多刀切削,自动化程度较高,结构较简单,生产效率也较高。
但是,专用机床的设计,制造周期长,造价高,工作可靠性也较差。
专用机床是针对某工件的一定工序设计的,当产品进行改进,工件的结构,尺寸稍有变化时,它就不能继续使用。
在综合了通用机床、专用机床优点的基础上产生了组合机床。
组合机床通常由标准通用部件和加工专用部件组合构成,动力部件采用电动机驱动或采用液压系统驱动,由电气系统进行工作自动循环的控制,是典型的机电或机电液一体化的自动加工设备。
常见的组合机床,标准通用部件有动力滑台各种加工动力头以及回转工作台等,可用电动机驱动,也可用液压驱动。
各标准通用动力部件组合构成一台组合机床时,该机床的控制电路可由各动力部件的控制电路通过一定的连接电路组合构成。
多动力部件构成的组合机床,其控制通常有三方面的工作要求:第一方面是动力部件的点动和复位控制。
第二方面是动力部件的半自动循环控制。
第三方面是整批全自动工作循环控制。
组合机床具有生产率高、加工精度稳定的优点。
因而,在汽车、柴油机、电机、机床等一些具有一定生产批量的企业中得到了广泛应用。
目前,组合机床的研制正向高效、高精度、高自动化和柔和性化方向发展。
本文所用组合机床为四工位组合机床,该机床由四个滑台,各载一个加工动力头,组成四个加工工位,除了四个加工工位外,还有夹具,上下料机械手和进料器,四个辅助装置以及冷却和液压系统共14个部分。
机床的四个加工动力头同时对一个零件的四个端面以及中心孔进行加工,一次加工完成一个零件,由上料机械手自动上料,下料机械手自动取走加工完成的零件,零件每小时可加工80件。
C534J1型双柱立式车床PLC系统控制设计 正文解读

2013.06.22
太原工业学院毕业答辩
横粱升降控制电路电气控制线路原理图
2013.06.22
太原工业学院毕业答辩
横粱升降控制电路电气控制线路原理图分析
在横粱上升时,接上升按钮SB52.KA4吸合(因SQ2未被压下),KM61得电, 夹紧电机M6正转,夹紧装置放松。放松到一定程度,压下SQ2,KM61失电, KM51得电,升降电机M5正转,横粱上升。松开按钮SB52.KA4失电.KM51 失电.M5停转,横粱上升停止。由于KA4释放,使KM62噬台,夹紧电机M6 反转,将横梁夹紧。横粱夹紧到一定程度时,夹紧电机M6负载增加,使夹紧 电流上升到一定值,电流继电器KA动作,KM62失电.横粱夹紧停止。 横梁下降时,接下降按钮SB53,横粱放松和下降过程与上升时相同,但 KM52得电的同时,断电延时继电器KT3也得电,为KM51接通横粱回升作准 备。当横粱下降到位,松开按钮SB53.KA4,KM52、KT3失电。因KT3断电 延时,使KM51得电,升降电机M5正转.横梁回升,KT3动台触点延时打开, KM5断电,M5失电横梁回升停止,同时KM62得电,夹紧电机M6反转,将横 粱夹紧,横粱夹紧到一定程度时,夹紧电机M6负载增加,使夹紧电流上升到 一定值,电流继电器KA动作,KM62失电,横粱夹紧停止。 为防止夹紧电机M6起动时电流过大而使KA误动作,在电路中设置了行程开关 SQ1,该行程开关只有当横粱被夹紧时才被压住,这样,即使M6起动时KA动 作,也不会使KM62失电。同时,SQ1还有另外一个作用,就是与工作台连锁。 横粱放松时,SQ1未被压住,工作台不能起动。由干横粱升降,夹紧都是短时 工作,电动机工作在点动状态,SQl5、SQ16为上、下限位开关。
2013.06.22 太原工业学院毕业答辩
G534J1立式车床的电气改造
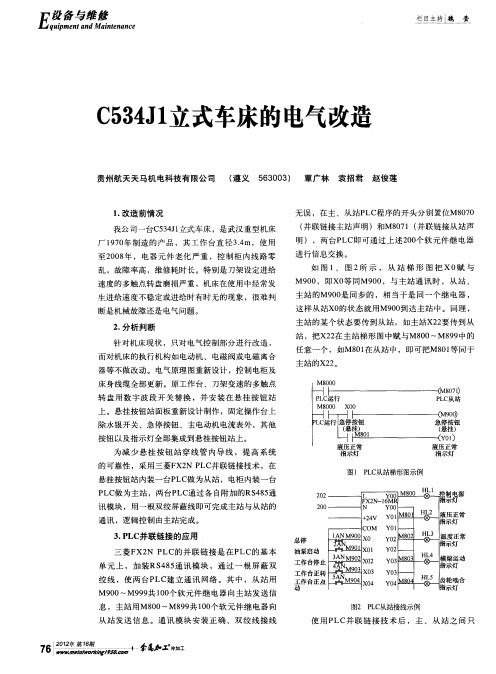
无误 ,在主、从站P C L 程序的开头分别置位M8 7 00 ( 并联链接主站声 明) ̄M8 7 并联链接从站声 N 0 1(
明 ) ,两 台P Cf 可通 过 上 述 2 0 软 元 件 继 电器 L i I J 0个 进 行信 息 交换 。 如 图 1 图 2 示 , 从 站 梯 形 图 把 X0 与 、 所 赋 M 9 0  ̄X 等 同M9 0 0 ,l O l l 0 ,与 主 站 通 讯 时 ,从 站 、 主 站 的 M9 0 同 步 的 ,相 当 于 是 同 一 个 继 电器 , 0是 这 样 从 站XO 状 态 就 用M9 0 I 主站 中 。 同理 , 的 0  ̄达 |
至2 0 年 ,电器元件老化 严重 ,控制柜 内线路零 08 乱 ,故障率高,维修耗时长。特别是刀架设定进给 速度的多触点转盘磨损严重 ,机床在使用中经常发
生进 给 速 度 不稳 定 或进 给 时有 时 无 的现 象 ,很 难 判 断是 机 械 故障 还 是 电气 问题 。
2 分析判断 .
_ < 0) _ M12
4 数 字波段开关 的应用 .
选用格雷码输 出的数字波段开关 ,其相邻挡位 之 间输出码 只有一位数变化 ,出错概率较低,安全
性 好 ,其输 出代 码 如 图3 所示 。NDS 3数 字波 段 开 0J
按钮以及指示灯全部集成到悬挂按钮站上。
I I
。
) l I
液压正常 指示灯
—
—
—
—
() 悬 挂
为减少 悬挂按钮 站穿线 管 内导 线 ,提 高系统
的可靠性 ,采用三菱F N P C X2 L 并联链接技术 ,在
悬 挂 按钮 站 内装一 台P C 为从 站 ,电柜 内装 一 台 L 做 P C 为 主站 ,两 台P C 过 各 自附 加 的RS 8 通 L 做 L 通 45 讯 模 块 ,用 一 根双 绞 屏 蔽线 即 可 完成 主 站 与从 站 的 通讯 ,逻辑 控 制 由主 站 完成 。
PLC对立式车床电气控制系统改造总体方案

PLC对立式车床电气控制系统改造总体方案2.1项目背景一台使用多年的39型立式车床,该车床的机械性能完好,但其继电器—接触器式控制系统中的元器件经常损坏,加上控制线路复杂,寻找故障十分麻烦,给维护工作带来极大困难。
为此我们决定采用PLC对该车床源电气系统进行改造。
我国80年代以前生产的机床是传统意义的机床,这些机床的电气控制基本上采用交流接触器和继电器控制,这些继电器、接触器件多,存在着电气元件多、功能弱、电气故障频繁、可靠性差、工作寿命短和维修保养不便的问题。
经过长期使用,电器元件易老化,触点容易烧毁,造成设备故障频发。
在维护过程中由于继电—接触器控制线路接点多,许多故障往往不能及时处理,给企业生产带来了许多不方便。
随着PLC技术的不断发展和完善,许多企业为了提高机床效率与精度,开始采用可编程控制器来代替传统继电器—接触器电气控制系统。
对普通机床电气控制系统进行技术改造,运用PLC技术提高机床的可靠性和精度,提高设备现代化技术水平,以适应市场经济带来的挑战。
这种改造方案无论是从经济上,还是从系统工作可靠性、维修性、工作寿命上来说,都是十分经济和划算的,性价比比较高,是非常可行的优选法案。
2.2控制系统改造总体方案2.2.1改造方案1.原有的机床维修操作方式不变。
机床原有的按钮、行程开关、控制变压器、交流接触器等继续使用,其控制作用保持不变,将原有的接触器—继电器硬件控制线路改为由PLC控制来实现。
2.由于线路中的电磁铁及电磁离合器较多,在选用PLC时,选用继电器输出型。
2.2.2可行性分析选用PLC控制机床实现原机床所有动作的逻辑控制,可以很好地解决目前机床存在的问题:控制线路复杂,故障点多,维修困难。
PLC目前已经大量应用与各种场合,是专门应用于工业控制领域取代继电器逻辑控制而设计制造的产品。
具有抗干扰能力强、可靠性高、编程简单、编程符合继电器控制的原有习惯等优点。
利用PLC控制代替原有的继电器—接触器硬件逻辑控制电路,去掉了硬件部分,有程序等软件代替,简化了控制线路,优化了电路,柔性提高了,升级和改造方便了,可以根据现场情况更方便地进行修改。
立式铣床PLC控制系统设计
机电工程学院课程设计说明书设计题目:X52K立式铣床PLC控制系统设计学生姓名:学号:专业班级:指导教师:2011年12月5日2011-2012学年第1学期机电控制综合设计课程设计设计题目名称:X52K立式铣床PLC控制系统设计院系名称专业班级:学生姓名:学号:指导老师:材料目录序号名称数量备注1 课程设计任务书 12 课程设计说明书 13 图纸 24内容摘要可编程控制器是在继电器控制和计算机技术的基础上,逐渐发展起来的以微处理器为核心,集微电子技术、自动化技术、计算机技术通信技术为一体,以工业自动化控制为目标的新型控制装置。
它具有结构简单、编程方便、可靠性高等优点,已广泛用于工业过程和位置的自动控制中。
据统计,可编程控制器是工业自动化装置中应用最多的一种设备。
专家认为,可编程控制器将成为今后工业控制的主要手段和重要的基础设备之一,PLC、机器人、CAD/CAM将成为工业生产的三大支柱。
由于PLC具有对使用环境适应性强的特性,同时其内部定时器资源十分丰富。
它的功能主要是:控制功能、数据采集、储存与处理功能、通信、联网功能、输入/输出接口调理功能、人机界面功能。
在系统构成时,可由一台计算机与多台PLC构成“集中管理、分散控制”的分布式控制网络,以便完成较大规模的复杂控制。
本次设计的内容主要是利用PLC对X52K型铣床的电器部分进行改造。
首先我对本设计进行总体的分析,使自己有一个大致的总体概念,然后仔细分析铣床,对车床主运动和进给运动还有其它的辅助运动,进行分析。
最后根据控制电路的线路图,编译PLC的梯形图,编译通过后,利用PLC实验台进行实验仿真。
因此使X52K铣床在完成原有的功能特点外,还具有安装简便、稳定性好、易于维修、扩展能力强等特点。
关键词:可编程控制器,X52K立式铣床,梯形图,电气控制目录第一章引言 (5)1.1 X52K立式铣床改造主要内容 (1)第二章电气控制原理 (2)2.1 主电路分析 (2)2.2控制电路分析 (3)第三章X52K万能铣床电气控制线路的PLC改造措施 (6)第四章系统元器件的选择 (7)3.1 PLC 类型的简介 (7)3.2 PLC型号的选择 (7)3.3 电动机选择 (8)3.4 其它元器件的选择 (8)3.4.1 交流接触器的选择 (8)3.4.2 中间继电器的选择 (9)3.4.3 保护电器的选择 (9)3.4.4 控制开关电器的选择 (9)第五章 PLC控制电路设计 (12)4.1 PLC的硬件电路框图 (12)4.2 车床控制PLC输入/输出接口分配表及电气原理图 (12)4.2.1 PLC控制原理电路设计 (13)第六章调试 (18)第七章设计总结及其致辞 (18)参考文献 (19)第一章引言随着社会生产力的发展,传统的继电器控制系统已经不能满足当今迅猛发展的社会的现代化生产要求,于是我们在选毕业设计课题之际,选定了课程设计课题——铣床PLC控制系统设计。
毕业设计(论文)任务书(基于PLC的立体车库控制系统设计)
(1)认真完成外文资料翻译工作,译文要通顺,贴切。
(2)按电气与自动化工程学院本科生毕业设计(论文)手册的相关要求完成开题报告、文献综述的撰写。
(3)完成毕业设计各项任务,撰写毕业论文。
(4)所设计的系统应能够仿真演示,动态效果佳。
4、进度安排
毕业设计(论文)各阶段任务
2、毕业设计(论文)的主要内容
毕业设计的主要内容包含了(1)完成5000字的英文文献的翻译工作;(2)完成文献综述和开题报告的撰写;(3)完成毕业论文的撰写。
毕业设计(论文)应体现本课题的主要设计思路,对基于PLC的立体车库控制系统的设计从拖动方案、传动机构、程序设计、界面设计组态等方面给予详细的叙述,同时对所设计的系统要进行仿真测试,并以视频方式记录ቤተ መጻሕፍቲ ባይዱ试结果。
起止日期
1
查阅文献,翻译外文资料,提交开题报告书
第七学期第18-20周
2
开展毕业设计(论文)工作
第八学期第1-7周
3
毕业设计(论文)中期检查
第八学期第8周
4
毕业设计(论文)修整
第八学期第9-12周
5
毕业设计(论文)提交评阅教师
第八学期第13周
6
毕业设计(论文)答辩
5月底
指导教师签字:
年月日
注:1、此表一式三份,学院、指导教师、学生各一份;
常熟理工学院本科毕业设计(论文)任务书
学院:电气与自动化工程学院
毕业设计(论文)题目:基于PLC的立体车库控制系统设计
指导教师姓名
许仙珍
专业技术职务
讲师
类别
毕业设计
学生
姓名
张浩
学号
YZ0411224
基于PLC的组合机床控制系统设计-任务书

1.掌握文献检索与阅读相关资料的一般方法;掌握方案论证分析比较和解决问题的能力,培养外文资料阅读翻译的能力。
2.PLC控制在机床控制系统设计中的应用
3、分析装置结构、确定设计内容、编制相关PLC控制程序
3、绘制控制系统的流程图、梯形图、及原理图等。
洛阳理工学院
毕业设计(论文)任务书
填表时间:2010年3月16日(指导教师填表)
学生姓名
专业班级
指导教师
课题类型
设计
题目
基于PLC的组合机床控制系统设计
主要研究
目标(或研究内容)
1.了解机床常用元器件的结构和工作原理,并能正确选用机床的控制器件。
2.掌握机床控制系统的设计方法。
3.结合该机床的动作要求,设计该机床的控制系统。
4、完成毕业设计书的撰写
进度计划
第5—6周收集资料,调研方案确定;
第7—8周绘制系统框架图,软件流程图
第9—11周绘制系统电器原理图;编写相应的软件控制程序
第12—14周备毕业答辩。
主要参
考文献
[1]廖长初编著.可编程控制器应用技术.重庆:重庆大学出版社,1997
[2]汪志峰主编.可编程控制器原理及应用.西安:西安电子科技大学出版社,2004
[3]郑凤翼主编.西门子S7-200系列PLC入门.北京:电子工业出版社,2008
[4]SIEMENS S7-200 PLC技术手册
[5]谢家瀛主编.组合机床设计简明手册.机械工业出版社,2002
[6]宋鸿升主编.组合机床与自动化加工技术.辽林:大连组合机床研究所,2008
[7]于凤丽主编.机床设备控制技术.机械工业出版社,2009
本科毕业设计论文--车辆出入库管理plc系统设计
1、绪论近20年来,随着我国城市建设速度的加快,城市交通需求量也日益增大。
由于私家车、出租车比重呈现逐年上升的趋势,因此车辆停放依旧是市民最为关注的问题。
也许还有不少人对上世纪八、九十年代的“挤车难”记忆犹新,但现在“停车难”的问题更让不少人头疼。
车辆停放设施的落后确实是长期困绕市民日常生活的一个老大难问题。
近年来各地政府部门投入了大量人力、物力用以改善城市停车设施,随着基础设施和重大工程的建设,以及车辆的淘汰、更新和扩容,一定程度上提高了许多车辆出入库的智能管理和安全化,并缓解了交通问题。
但是,简单的基础设施建设和停车管理技术已经不能满足社会日益增长的车辆对停车服务的需求。
为了使交通更加便捷畅通,智能交通系统(ITS)的理念越来越受到人们的关注,该系统将先进的计算机处理技术、信息技术、数据通信传输技术、自动控制技术、人工智能及电子技术等有效地综合运用于车辆出入库智能管理体系中,建立一种在区域性内全方位发挥作用的准时、快捷、高效的停车智能管理体系。
在车辆出入库智能管理领域,相应的也出现了PLC车辆出入库智能管理的概念,即含有高科技的智能系统,与普通的停车系统不同的是,它能以PLC技术为基础来解决停车难的问题,直接安全、迅速地到达目的地。
因此,在大力加强车辆停放智能管理的建设方面,尤其在实现快捷、便利、安全这一点上拥有很大的发展空间和潜力。
为此,本文对车辆出入库智能控制管理上引入了PLC技术,对车辆出入库进行了一个关于PLC为主的系统设计。
近几年来我国不少城市也提出了实现数字化、智能化城市停车管理的设想;客观地说,目前我国的车辆停放管理还是面临着不少有待解决的问题。
停车位的详细数据采集、车辆收费系统的管理、车辆出入库安全布局等都有待通过提高信息化程度加以提高。
因此,使用准确而高效的智能车辆管理系统,为管理部门和政府决策机构提供快捷的监督管理工具和详实完整的信息,将是车辆出入库发展的关键。
智能交通系统ITS(Intelligent Transportation system)是目前世界交通运输领域研究的前沿课题,其核心是针对我国目前日益严重的停车需求、资源过度开发和环境保护的压力,采用信息技术、数字通信传输技术、计算机技术、电子控制技术及系统集成等高新技术对传统车辆出入库系统进行深入的改造,以提高整个车辆出入库系统资源的使用效率、改善和提高车辆的安全性。
(完整word版)基于PLC的立体仓库控制系统的设计【范文仅供参考】

摘要随着国民经济的飞速发展,自动化立体仓库必然会在各行各业中得到越来越广泛的应用。
自动化立体仓库是现代物流系统的重要组成部分,是一种多层存放货物的高架仓库系统,由自动控制与管理系统、高位货架、巷道堆垛机、自动入库、自动出库、计算机管理控制系统以及其他辅助设备组成。
本仓库模型控制系统是根据自动化立体仓库运行的基本原理而设计的。
在整个控制系统中以三菱FX2N系列PLC作为核心控制元件,专用键盘作为人机接口部件,控制步进电机来驱动一个有三自由度的仓库模型在高强度导轨上做三维运动。
以步进电机每转输出的脉冲数为基础,通过键盘对每个仓位予以地址编码,通过PLC对命令键盘进行扫描并得到相应的仓位号,当PLC 接收到来自键盘的输入命令后,便输出对应仓位的脉冲数,经过驱动器驱动步进电机按设定的方向转动一定的角度,进而控制传动部件丝杠旋转进行准确的定位,以完成货物的存取功能.另外,为了保证整个控制系统运行的稳定性和可靠性,我们还采用了限位开关对其进行限位保护.本文首先对该课题的可行性及课题实现的现实意义和价值进行了介绍;其次对该系统的硬件组成、结构、原理进行了阐述和分析;再次对本控制系统的核心——软件进行了编写,论文中即有梯形图又有相应的语句表;最后对设计本课题所学到的知识和结论进行归纳和总结,并对本论文有待完善的地方进行扼要的说明.关键字:立体仓库可编程控制器(PLC)步进电机物流管理目录1.绪论 (3)1.1 本课题设计的背景 (3)1。
2 本课题设计的内容 (4)1。
3 本课题设计的目的和意义 (4)2。
系统控制方案的确定 (5)2。
1 自动化立体仓库的概述 (5)2.2采用PLC控制立体仓库的优点 (5)2.3系统设计的基本步骤 (6)2.4 系统控制方案 (7)2。
5立体仓库技术参数的确定 (9)3.系统硬件设计 (9)3.1 控制系统结构设计 (9)3.2 可编程控制器(PLC)的选型 (10)3.2.1 PLC概述 (10)3。
C534J1型双柱立式车床PLC系统控制设计 正文.
C534J1型双柱立式车床PLC系统控制摘要:本文介绍了用可编程序控制器来对双柱立式车床控制系统进行现代化改造,简要叙述了双柱立式车床的工作原理及用PLC进行改造设计的方法和设计步骤,并给出PLC编程程序梯形图。
PLC控制的特点使原机床控制大大的简单化,并且维修方便,易于检查。
节省大量的继电器元件,使机床的工作效率更高。
关键词:PLC,双柱立式车床,控制Control of C534J1 type double column vertical lathe PLCsystemAbstract: This paper introduces a programmable controller is used to double column vertical lathe control system modernization, briefly describes the working principle of double column vertical lathe and method of the design and the design procedure of PLC, and gives the PLC programming ladder diagram. PLC control features of the original machine control greatly simplified, and the repair is convenient, easy to check. Save a lot of relay element, make the machine work efficiency is higher. Keywords: PLC, double column vertical lathe, control目录1 绪论.............................................................11.1本文的选题意义..............................................11.2 C534J1型双柱立式车床的简介.................................12 C534J1型双柱立式车床的控制系统分析 (2)2.1C534J1型立式车床基本情况...................................2 2.2 C534J1型双柱立式车床的电气原理图及电路分析.................22.2.1 工作台主拖动电气控制电路分析...........................22.2.2 横粱升降控制电路分析.................................52.2.3 刀架移动控制电路分析.................................73 C534J1型双柱立式车床PLC控制系统设计............................113.1 PLC的基本组成及分类........................................113.2 PLC的基本工作原理..........................................113.3 PLC与继电器控制系统、微机区别...............................113.4 PLC控制系统设计的要点......................................123.5 PLC控制的I\O设备的分配....................................133.6 PLC外部接线图..............................................163.7 PLC梯形图设计.............................................183.8 C534J1型双柱立式车床西门子S7-200型PLC调试........234 电器元件的选型..................................................28 4.1交流电动机的选择............................................284.2控制变压器的选择............................................28 4.3断路器QF的选择.............................................28 4.4接触器KM的选择.............................................28 4.5时间继电器KT的选择.........................................29 4.6中间继电器K的选择..........................................30 4.7 熔断器FU的选择.............................................304.8 电动机电缆的选择............................................315 总结............................................................32参考文献..........................................................33致谢...............................................................341 绪论1.1本文的选题意义利用PLC 的高可靠性、高抗干扰,寿命长、维修量少、查找外部线路简单的特点改造传统继电器控制系统是很好的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2013.06.22
太原工业学院毕业答辩
二、 C534J1型双柱立式车床
2013.06.22 太原工业学院毕业答辩
刀架移动控制电气原理图
2013.06.22
太原工业学院毕业答辩
2013.06.22
太原工业学院毕业答辩
刀1)刀架进给控制。工作台起动后.可令刀架作进给运动,将转换开关SA5放在 “进给”位置,再用十字开关SA1选择进给方向,如滑枕向上运动,此时KA14和 KA6吸合,使K2 - HL得电。查线跟踪可以看到,电磁离合器YC29、YC2-L得电。 YC29得电后接通刀架垂直方向传动机构,YC2 -L得电使水平方向的进给机构刹车, 刀架不能在水平方向移动。这时,再按下接钮SB27,KM81得电,电机M8正转,滑 枕向上进给。同样,当SA1选定滑枕向下位置时,按下SB27,则KM82吸台.M8反 转,滑枕向下进给,将SA1置中间,进给电机M8停止。切削刀具装在滑枕下端。 刀架水平进给时。如SAl置刀架于中心位置,KA9得电,K2-LR吸台,电磁离台器 YC28,YC2-S得电。YC28得电接通刀架水平进给传动机构,YC2-S得电将滑枕刹车。 再按下SB27,KM81得电。M8正转。刀架向离开中心方向移动。同样,如SAl置刀 架向中心位置,按下SB27,则KM82得电,M8反转,刀架向中心方向移动。 2)刀架快速移动控制。刀架快速移动为点动控制。将SA1放在所需方向上,SA5转 至“快速”位置,KA20吸合,接通KA21.使电磁离合器YC2-F、YC2l相继得电, 接通刀架快速移动转动机构。再按下SB27,KM81或KM82得电,电机M8正转或反转, 刀架便在设定的方向快速移动,由于KA14来吸合,KM81或KM82无自锁,实现点动 控制。 3)刀架调整移动控制。这种工作方式也称低速调整移动,用于精确对刀,故以点 动方式进行。SAl放在所需方向,SA5置空挡,“进给”“快速”均断开。接下 SB27,KM8l或KM82得电,电机M8正转或反转,刀絮随之移动。
SB1,SB5
SB6 SB10 SB11 SB15 SB16
X6
X7 X10 X11 X12 X13
主拖动电动机反接接触器
油泵电动机接触器 卸载电磁阀 工作台变速电磁阀 工作台变速电磁阀 横梁上升接触器
KM12
KM7 YA9 YA YA7 KM51
Y6
Y7 Y10 Y11 Y12 Y13
2013.06.22
2013.06.22 太原工业学院毕业答辩
主拖动电气控制线路原理图
2013.06.22
太原工业学院毕业答辩
2013.06.22
太原工业学院毕业答辩
C534J1型双柱立式车床控制主拖动电气原理图分析
①起动。 接通控制电路电源后,指示灯H2亮,说明润滑正常。在横粱夹紧 时.压下 SQ1。在齿轮啮台正常时,限位开关SQ3、SQ4复位,同时 指示灯H1亮,以示齿轮啮合良好。当工作台导轨油温过高达50℃时。 水银接触温度计ST1将KA11接通,报警灯H3亮,表示导轨温度过高; 当温度达到60℃时,水银接触温度计ST2将KA12接通,使工作台自动 停止工作。 按下起动按钮SB6,接触器KM11、中间继电器KA13线圈得电吸 合自锁,工作台电动机M1起动,同时使KTX,KT2得电,KTl延时3-4s 后动作,使KMX线圈得电吸合KT2延时7-8S后动作,使KMZ线圈得电 吸台,实现逐级切除M1电机转子串电阻.完成平稳起动。 在油泵电动机M7起动时,电磁铁YA9得电推动油压阀,油压使得 工作台略有抬起。当工作台起动结束,KM2吸合后,使YA9失电,工 作台下降到正常位置。反转时,按下SB11后动作过辊与正转时类似。
SQ12 SQ8 SQ17 FR8
X36 X37 X40 X41
进给(移动)电动机点动按钮
调速开关 调速开关 调速开关 调速开关 调速开关 调速开关 调速开关 调速开关 调速开关
SB27
SA2-1 SA2-2 SA2-3 SA2-4 SA2-5 SA2-6 SA2-7 SA2-8 SA2-9
X42
X43 X44 X45 X46 X47 X50 X51 X52 X53
调速开关
调速开关 调速开关
SA2-10
SA2-11 SA2-12
X54
X55 X56
2013.06.22
太原工业学院毕业答辩
调速开关 调速开关 调速开关 调速开关 调速开关 调速开关 调速开关 调速开关 调速开关 调速开关 调速开关 调速开关
SA2-13 SA2-14 SA2-15 SA2-16 SA2-17 SA2-18 SA2-19 SA2-20 SA2-21 SA2-22 SA2-23 SA2-24
2013.06.22 太原工业学院毕业答辩
三、I/O地址分配
输入/输出分配表
输入信号 名称 代号 输入点编 号 名称 输出信号 代号 输出点编 号
导轨温度报警输入
导轨温度切除输入 横梁夹紧行程开关 齿轮啮合行程开关 齿轮啮合行程开关 速度继电器
ST1
ST2 SQ1 SQ3 SQ4 SR
X0
X1 X2 X3 X4 X5
太原工业学院毕业答辩
六、程序调试
用gx developer进行软件调试,
2013.06.22
太原工业学院毕业答辩
2013.06.22
太原工业学院毕业答辩
2013.06.22
太原工业学院毕业答辩
2013.06.22
太原工业学院毕业答辩
X57 X60 X61 X62 X63 X64 X65 X66 X67 X70 X71 X72
2013.06.22
太原工业学院毕业答辩
四、PLC接线图
2013.06.22
太原工业学院毕业答辩
五、梯形图
2013.06.22
太原工业学院毕业答辩
2013.06.22
太原工业学院毕业答辩
2013.06.22
SQ15
SQ16 SB53 SB52 SA1-1 SA1-2 SA1-3 SA1-4 SA5-1 SA5-2 SQ7
X23
X24 X25 X26 X27 X30 X31 X32 X33 X34 X35
刀架调速电磁铁
刀架调速电磁铁 刀架调速电磁铁 刀架调速电磁铁 刀架调速电磁铁 刀架左右控制电磁铁 刀架垂直制动电磁铁 刀架上下电磁铁 刀架水平制动电磁铁 刀架快速电磁铁
齿轮啮合指示灯
润滑指示灯 导轨高温报警 主拖动电动机电阻切除接触器 主拖动电动机电阻切除接触器 主拖动电动机正转接触器
H1
H2 H3 KM2 KM1 KM11
Y0
Y1 Y2 Y3 Y4 Y5
总停止按钮
主拖动电动机正转起动按钮 主拖动电动机正转点动按钮 主拖动电动机反转起动按钮 主拖动电动机反转点动按钮 主拖动电动机停止按钮
2013.06.22
太原工业学院毕业答辩
横粱升降控制电路电气控制线路原理图
2013.06.22
太原工业学院毕业答辩
横粱升降控制电路电气控制线路原理图分析
在横粱上升时,接上升按钮SB52.KA4吸合(因SQ2未被压下),KM61得电, 夹紧电机M6正转,夹紧装置放松。放松到一定程度,压下SQ2,KM61失电, KM51得电,升降电机M5正转,横粱上升。松开按钮SB52.KA4失电.KM51 失电.M5停转,横粱上升停止。由于KA4释放,使KM62噬台,夹紧电机M6 反转,将横梁夹紧。横粱夹紧到一定程度时,夹紧电机M6负载增加,使夹紧 电流上升到一定值,电流继电器KA动作,KM62失电.横粱夹紧停止。 横梁下降时,接下降按钮SB53,横粱放松和下降过程与上升时相同,但 KM52得电的同时,断电延时继电器KT3也得电,为KM51接通横粱回升作准 备。当横粱下降到位,松开按钮SB53.KA4,KM52、KT3失电。因KT3断电 延时,使KM51得电,升降电机M5正转.横梁回升,KT3动台触点延时打开, KM5断电,M5失电横梁回升停止,同时KM62得电,夹紧电机M6反转,将横 粱夹紧,横粱夹紧到一定程度时,夹紧电机M6负载增加,使夹紧电流上升到 一定值,电流继电器KA动作,KM62失电,横粱夹紧停止。 为防止夹紧电机M6起动时电流过大而使KA误动作,在电路中设置了行程开关 SQ1,该行程开关只有当横粱被夹紧时才被压住,这样,即使M6起动时KA动 作,也不会使KM62失电。同时,SQ1还有另外一个作用,就是与工作台连锁。 横粱放松时,SQ1未被压住,工作台不能起动。由干横粱升降,夹紧都是短时 工作,电动机工作在点动状态,SQl5、SQ16为上、下限位开关。
太原工业学院毕业答辩
主拖动电动机热继电器 水银开关 油泵起动开关 油泵电动机热继电器 工作台变速按钮 夹紧电动机过电流继电器 横梁放松行程开关
FR1 SL SB20 FR7 SB51 KA SQ2
X14 X15 X16 X17 X20 X21 X22
横梁下降接触器 横梁放松接触器 横梁夹紧接触器 刀架进给电动机中正转接触器 刀架移动电动机中反转接触器 刀架调速电磁铁 刀架调速电磁铁
C534J1型双柱立式车床PLC控制 系统设计
学生: 指导老师:老师 班级: 学号:
2013.06.22 太原工业学院毕业答辩
一、选题意义 二、C534J1型双柱立式车床 三、I/O地址分配 四、PLC接线图 五、梯形图 六、程序调试
2013.06.22
太原工业学院毕业答辩
一、选题意义
C534J1型双柱立式车床的 主要运动部件有圆形工作台、 横粱和刀架。工作台下面有圆 形导轨,工作台围绕垂直轴心 旋转。立柱上装有横粱,横梁 可以沿立柱上下移动,并在机 床加工时被夹紧在立桂上。横 粱上装置刀架,刀架能够沿横 粱左右快速移动或进给移动。刀架上装有滑枕,滑枕 沿刀架可以快速移动或进给移动。