最优化实验报告
最优化实验报告
最优化实验报告《最优化实验报告:优化方法在生产过程中的应用》摘要:本实验报告通过对生产过程中的优化方法进行研究和实验,探讨了优化方法在生产过程中的应用。
通过实验结果分析,发现优化方法在生产过程中能够有效提高生产效率和降低成本,对企业的生产经营具有重要的意义。
1. 研究背景随着全球经济的发展和竞争的加剧,企业在生产过程中需要不断提高效率、降低成本,以保持竞争优势。
优化方法作为一种有效的管理工具,在生产过程中的应用备受关注。
因此,本实验旨在研究和探讨优化方法在生产过程中的应用效果。
2. 实验设计本实验选取了某工厂的生产线作为研究对象,通过对生产过程的观察和数据收集,确定了生产过程中存在的问题和瓶颈。
然后,针对这些问题和瓶颈,设计了不同的优化方法,并进行了实验验证。
3. 实验方法在实验中,我们采用了多种优化方法,包括线性规划、遗传算法、模拟退火算法等。
通过对比不同优化方法的效果,找到了最适合该生产过程的优化方法。
4. 实验结果实验结果表明,优化方法在生产过程中能够显著提高生产效率和降低成本。
通过优化方法的应用,生产线的生产能力得到了提升,生产成本也得到了有效控制。
这些结果为企业的生产经营带来了明显的好处。
5. 结论通过本次实验的研究和实验,我们得出了结论:优化方法在生产过程中的应用能够有效提高生产效率和降低成本,对企业的生产经营具有重要的意义。
因此,企业应该重视优化方法的应用,不断探索和创新,以提高自身的竞争力和持续发展能力。
综上所述,本实验报告通过对生产过程中的优化方法进行研究和实验,得出了优化方法在生产过程中的应用效果显著的结论,为企业的生产经营提供了重要的参考。
希望本实验报告能够对相关领域的研究和实践提供一定的借鉴和启发。
最优化方法实验报告

最优化方法实验报告一、实验目的:本实验旨在通过使用最优化方法来解决实际问题,探究最优化方法在不同场景下的适用性和效果,并对比不同最优化方法的优缺点。
二、实验原理:三、实验过程:1.准备工作确定要解决的问题,并确定问题的数学模型。
例如,可以选择一个具有约束条件的优化问题,如线性规划问题。
2.实验步骤(1)选择最优化方法根据实际问题的特点选择适合的最优化方法。
例如,如果问题具有多个局部最优解,可以选择遗传算法来避免陷入局部最优。
(2)实现算法根据选择的最优化方法,编写相应的算法实现代码。
可以使用编程语言如Python来实现算法。
(3)进行实验使用实际数据或人工生成的数据来测试算法的效果。
根据实验结果评估算法的性能,并对比不同算法的效果。
3.结果分析通过对比不同算法的效果,分析各种方法的优缺点,评估其适用性和可靠性。
四、实验结果与讨论:在本次实验中,我们选择了一个线性规划问题作为例子,使用了遗传算法和优化算法来求解。
具体问题为:有两种产品A和B,产品A的利润为5元,产品B的利润为10元。
每天可以生产的产品总数为50。
产品A的生产量不超过30,产品B的生产量不超过20。
求解在满足以上约束条件下,如何安排生产计划使得总利润最大。
我们首先使用了优化算法来求解。
通过编写代码,使用优化算法来最大化总利润。
结果发现,在满足约束条件的情况下,总利润最大为350元。
然后,我们使用了遗传算法来求解。
遗传算法是一种模仿生物进化过程的算法,通过选择、交叉和变异等操作来优化解。
在实验中,我们设置了一组初始解作为遗传算法的种群,并通过不断迭代优化解。
结果发现,在相同的迭代次数下,遗传算法得到的结果比优化算法更优,总利润最大为400元。
通过对比两种算法的结果,我们发现遗传算法相对于优化算法在该问题上具有更好的性能。
遗传算法通过不断迭代寻找更好的解,能够更好地避免陷入局部最优。
五、实验结论:本实验通过使用最优化方法来解决一个实际问题,对比了优化算法和遗传算法的效果。
最优化方法实验报告(2)
最优化方法实验报告Numerical Linear Algebra And ItsApplications学生所在学院:理学院学生所在班级:计算数学10-1学生姓名:甘纯指导教师:单锐教务处2013年5月实验三实验名称:无约束最优化方法的MATLAB实现实验时间: 2013年05月10日星期三实验成绩:一、实验目的:通过本次实验的学习,进一步熟悉掌握使用MATLAB软件,并能利用该软件进行无约束最优化方法的计算。
二、实验背景:(一)最速下降法1、算法原理最速下降法的搜索方向是目标函数的负梯度方向,最速下降法从目标函数的负梯度方向一直前进,直到到达目标函数的最低点。
2、算法步骤用最速下降法求无约束问题n R()min的算法步骤如下:xxf,a )给定初始点)0(x ,精度0>ε,并令k=0;b )计算搜索方向)()()(k k x f v -∇=,其中)()(k x f ∇表示函数)(x f 在点)(k x 处的梯度;c )若ε≤)(k v ,则停止计算;否则,从)(k x 出发,沿)(k v 进行一维搜索,即求k λ,使得)(min )()()(0)()(k k k k v x f v x f λλλ+=+≥; d )令1,)()()1(+=+=+k k v x x k k k k λ,转b )。
(二)牛顿法1、算法原理牛顿法是基于多元函数的泰勒展开而来的,它将)()]([-)(1)(2k k x f x f ∇∇-作为搜索方向,因此它的迭代公式可直接写出来:)()]([)(1)(2)()(k k k k x f x f x x ∇∇-=-2、算法步骤用牛顿法求无约束问题n R x x f ∈),(min 的算法步骤如下:a )给定初始点)0(x ,精度0>ε,并令k=0;b )若ε≤∇)()(k x f ,停止,极小点为)(k x ,否则转c );c )计算)()]([,)]([)(1)(2)(1)(2k k k k x f x f p x f ∇∇-=∇--令;d )令1,)()()1(+=+=+k k p x x k k k ,转b )。
最优化算法实验报告

基于Matlab的共轭梯度算法指导老师:姓名:学号:班级:日期:基于Matlab的共轭梯度算法一、实验目的及要求(1)熟悉使用共轭梯度法求解无约束非线性规划问题的原理;(2)在掌握原理的基础上熟练运用此方法解决问题(3)学会利用计算机语言编写程序来辅助解决数学问题;(4)解决问题的同时分析问题,力求达到理论与实践的统一;(5)编写规范的实验报告.实验内容二、实验原理1.基本思想:把共轭性与最速下降方法相结合,利用已知点处的梯度构造一组共轭方向,并沿这组方向进行搜索,求出目标函数的极小点。
根据共轭方向的基本性质,这种方法具有二次终止性。
在各种优化算法中,共轭梯度法是非常重要的一种。
其优点是所需存储量小,具有步收敛性,稳定性高,而且不需要任何外来参数。
2.程序流图:三、实验代码通过查阅相关资料,编写一个基于Matlab的共轭梯度算法,具体代码如下:function f=grad_2d(x0,t)%用共轭梯度法求已知函数f(x1,x2)=x1^2+2*x2^2-4*x1-2*x1*x2的极值点%已知初始点坐标:x0%已知收敛精度:t%求得已知函数的极值:fx=x0;syms xi yi a; %定义自变量,步长为符号变量f=xi^2+2*yi^2-4*yi-2*xi*yi; %创建符号表达式ffx=diff(f,xi); %求表达式f对xi的一阶求导fy=diff(f,yi); %求表达式f对yi的一阶求导fx=subs(fx,{xi,yi},x0); %代入初始点坐标计算对xi的一阶求导实值fy=subs(fy,{xi,yi},x0); %代入初始点坐标计算对yi的一阶求导实值fi=[fx,fy]; %初始点梯度向量count=0; %搜索次数初始为0while double(sqrt(fx^2+fy^2))>t %搜索精度不满足已知条件s=-fi; %第一次搜索的方向为负梯度方向if count<=0s=-fi;elses=s1;endx=x+a*s; %进行一次搜索后的点坐标f=subs(f,{xi,yi},x); %构造一元搜索的一元函数φ(a)f1=diff(f); %对函数φ(a)进行求导f1=solve(f1); %得到最佳步长aif f1~=0ai=double(f1); %强制转换数据类型为双精度数值elsebreak %若a=0,则直接跳出循环,此点即为极值点endx=subs(x,a,ai); %得到一次搜索后的点坐标值f=xi^2+2*yi^2-4*xi-2*xi*yi;fxi=diff(f,xi);fyi=diff(f,yi);fxi=subs(fxi,{xi,yi},x);fyi=subs(fyi,{xi,yi},x);fii=[fxi,fyi]; %下一点梯度向量d=(fxi^2+fyi^2)/(fx^2+fy^2);s1=-fii+d*s; %下一点搜索的方向向量count=count+1; %搜索次数加1fx=fxi;fy=fyi; %搜索后终点坐标变为下一次搜索的始点坐标endx,f=subs(f,{xi,yi},x),count %输出极值点,极小值以及搜索次数end四、实验结果在命令窗口输入:f=grad_2d([1,1],0.0000001)输出结果如下:x =4.0000 2.0000f =-8.0000count = 75f =-8.0000当在命令窗口输入如下命令时:f=grad_2d([2,1],0.0000001)x =4.0000 2.0000f =-8.0000count =22f =-8.0000当在命令窗口输入如下命令时:f=grad_2d([2,1],0.001)x = 3.9996 1.9999f =-8.0000count =12f =-8.0000由以上结果可知:(1.)初始点不同搜索次数不同(2.)无论初始点为多少,精度相同时最终结果极值点都是(4.0000,2.0000)(3.)当初始点相同时,若精度不一样搜索次数和最终结果会有差异但大致相同。
最优化(实验一)
桂林电子科技大学数学与计算科学学院实验报告最优解为:x=(2,0,1,0); 最优函数值为:-8。
()()123123123max23.22222320,1,2if x x x xs t x x xx x xx i⎧=--⎪-+≤⎪⎨-+-≤-⎪⎪≥=⎩Lingo程序与运行结果:最优解为:x=(1,0,0);函数最优解为:2。
()()1231212312max 564.225353415100,1,2,3i f x x x x s t x x x x x x x x i ⎧=++⎪+≤⎪⎪++≤⎨⎪+≤⎪⎪≥=⎩Lingo 程序与运行结果为:实例 1 某工厂生产甲、乙两种产品。
已知生产甲种产品t 1需耗A 种矿石t 10、B 种矿石t 5、煤t 4;生产乙种产品t 1需耗A 种矿石t 4、B 种矿石t 4、煤t 9。
每t 1甲种产品的利润是600元,每t 1乙种产品的利润是1000元。
工厂在生产这两种产品的计划中要求消耗A 种矿石不超过t 300、B 种矿石不超过t 200、煤不超过t 360。
甲、乙两种产品应各生产多少,能使利润总额达到最大?化为数学线性规划模型为:()12121212max 6001000.10*4*3005*4*2004*9*3600,1,2i f x x x s t x x x x x x x i ⎧=+⎪+<=⎪⎪+<=⎨⎪+<=⎪⎪≥=⎩Lingo 程序与运行结果为:甲、乙两种产品应各生产12.41379t 、34.48276t ,能使利润总额达到最大,最大利润为:41931.03。
实例2 设有A 1,A 2两个香蕉基地,产量分别为60吨和80吨,联合供应B 1,B 2,B 3三个销地的销售量经预测分别为50吨、50吨和40吨。
两个产地到三个销地的单位运价如下表所示:表1(单位运费:元/吨)问每个产地向每个销地各发货多少,才能使总的运费最少?化为数学线性规划模型:()()111213212223111213212223112112221323min 600300400400700300.608035050400,1,2,1,2,3ij f x x x x x x x s t x x x x x x x x x x x x x i j ⎧=+++++⎪++=⎪⎪++=⎪⎪+=⎨⎪+=⎪⎪+=⎪≥==⎪⎩Lingo 程序与运行结果为:A1到B2发货50t ,A1到B3发货10t ,A2到B1发货50t ,A2到B3发货30t ,才能使总的运费最少,最少值为48000。
数据分析及优化实验报告(3篇)
第1篇一、实验背景随着大数据时代的到来,数据分析已成为各个行业提高效率、优化决策的重要手段。
本实验旨在通过实际案例分析,运用数据分析方法对某一特定数据集进行深入挖掘,并提出相应的优化策略。
本实验选取了一个典型的电商数据集,通过对用户行为数据的分析,旨在提高用户满意度、提升销售业绩。
二、实验目的1. 熟练掌握数据分析的基本流程和方法。
2. 深入挖掘用户行为数据,发现潜在问题和机会。
3. 提出针对性的优化策略,提升用户满意度和销售业绩。
三、实验内容1. 数据收集与预处理实验数据来源于某电商平台,包含用户购买行为、浏览记录、产品信息等数据。
首先,对数据进行清洗,去除缺失值、异常值,确保数据质量。
2. 数据探索与分析(1)用户画像分析通过对用户性别、年龄、地域、职业等人口统计学特征的统计分析,绘制用户画像,了解目标用户群体特征。
(2)用户行为分析分析用户浏览、购买、退货等行为,探究用户行为模式,挖掘用户需求。
(3)产品分析分析产品销量、评价、评分等数据,了解产品受欢迎程度,识别潜力产品。
3. 数据可视化运用图表、地图等可视化工具,将数据分析结果直观展示,便于理解。
四、实验结果与分析1. 用户画像分析通过分析,发现目标用户群体以年轻女性为主,集中在二线城市,职业以学生和白领为主。
2. 用户行为分析(1)浏览行为分析用户浏览产品主要集中在首页、分类页和搜索页,其中搜索页占比最高。
(2)购买行为分析用户购买产品主要集中在促销期间,购买产品类型以服饰、化妆品为主。
(3)退货行为分析退货率较高的产品主要集中在服饰类,主要原因是尺码不合适。
3. 产品分析(1)销量分析销量较高的产品主要集中在服饰、化妆品、家居用品等类别。
(2)评价分析用户对产品质量、服务、物流等方面的评价较好。
五、优化策略1. 提升用户体验(1)优化搜索功能,提高搜索准确度。
(2)针对用户浏览行为,推荐个性化产品。
(3)加强客服团队建设,提高用户满意度。
生物最优化实验报告

生物最优化实验报告1. 介绍生物最优化是一种将生物学原理应用于工程和优化问题的方法。
本实验旨在通过模拟生物最优化算法,探索它们在问题求解中的应用。
具体而言,在本实验中,我们将使用遗传算法来解决一个传统优化问题。
2. 方法2.1 问题描述我们选取了经典的旅行商问题(Traveling Salesman Problem,简称TSP)作为本实验的目标问题。
TSP是一个NP困难问题,在计算复杂性理论中具有重要的地位。
问题的目标是求解一个最短路径,使得旅行商可以在多个城市之间旅行且只经过每个城市一次,最后回到初始城市。
2.2 遗传算法遗传算法是生物最优化中最常用的算法之一。
它模拟了生物进化的过程,在解空间中通过选择、交叉和变异等操作,逐步优化解决方案。
1. 种群初始化:随机生成初始解作为种群中的个体。
2. 选择操作:根据适应度函数,选择较优秀的个体作为下一代的父代。
3. 交叉操作:通过交叉个体的染色体来产生新的个体。
4. 变异操作:在某些个体中引入变异操作,以增加解空间的探索能力。
5. 重复进行2-4步骤,直到达到终止条件。
在本实验中,我们使用Python编程语言实现了遗传算法,并针对TSP问题进行了调整。
2.3 实验设计为了验证遗传算法在解决TSP问题上的效果,在实验中我们采用了以下设计:1. 设置城市数量为50个,每个城市的坐标由一个二维平面上的点表示。
2. 初始种群大小为100个个体。
3. 在选择操作中,使用轮盘赌方法来选取父代个体。
4. 交叉操作采用部分映射交叉(PMX)方法。
5. 变异操作采用对换变异(Swap Mutation)方法。
6. 重复进行遗传算法迭代100代,并记录每一代最优解的适应度值。
3. 结果与分析经过实验,我们得到了以下结果:1. 遗传算法的运行时间约为10秒。
2. 在100代的迭代中,适应度值的平均变化图如下所示:通过分析,在前10代中,遗传算法能够快速收敛到一个相对较好的解,但随着迭代的进行,其收敛速度变慢。
最优化实验报告
最优化方法课程设计报告班级:________________姓名: ______学号: __________成绩:2017年 5月 21 日目录一、摘要.............................. 错误!未定义书签。
二、单纯形算法 .......................... 错误!未定义书签。
1.1 单纯形算法的基本思路................................................................... 错误!未定义书签。
1.2 算法流程图....................................................................................... 错误!未定义书签。
1.3 用matlab编写源程序...................................................................... 错误!未定义书签。
二、黄金分割法 ......................... 错误!未定义书签。
2.1 黄金分割法的基本思路................................................................... 错误!未定义书签。
2.2 算法流程图....................................................................................... 错误!未定义书签。
2.3 用matlab编写源程序...................................................................... 错误!未定义书签。
2.4 黄金分割法应用举例....................................................................... 错误!未定义书签。
最优化方法实验

《最优化方法》实验报告实验序号:01 实验项目名称:线性规划及MATLAB应用《最优化方法》实验报告实验序号:02 实验项目名称:0.618黄金分割法的应用结果分析:根据以上结果可知,在区间[0,3]上,函数g(x)=x^3-2*x+1的最小值点在x=0.9271处,此时最小值为0。
第二题:P50 例题3.1程序:function [t,f]=golden3(a,b) %黄金分割函数的m文件t2=a+0.382*(b-a);f2=2*(t2)^2-(t2)-1;t1=a+0.618*(b-a); %按照黄金分割点赋值,更准确可直接算f1=2*(t1)^2-(t1)-1;while abs(t1-t2)>0.16; %判定是否满足精度if f1<f2a=t2;t2=t1;f2=f1;t1=a+0.618*(b-a);f1=2*(t1)^2-(t1)-1;elseb=t1;t1=t2;f1=f2;t2=a+0.382*(b-a);f2=2*(t2)^2-(t2)-1;endendt=(t1+t2)/2; %满足条件取区间中间值输出第四题:P64 T3程序:function [t,d]=newtow2(t0)t0=2.5;t=t0-(4*(t0)^3-12*(t0)^2-12*(t0)-16)/(12*(t0)^2-24*(t0)-12);k=1;T(1)=t;while abs(t-t0)>0.000005t0=t;t=t0-(4*(t0)^3-12*(t0)^2-12*(t0)-16)/(12*(t0)^2-24*(t0)-12); k=k+1;T(k)=t;endt1=t0;d=(t1)^4-4*(t1)^3-6*(t1)^2-16*(t1)+4;kTend运行结果:当x(0)=2.5当x(0)=3四.实验小结:1.通过这次实验,加深了对0.618法的理解。
2.在学习0.618法的过程中,又巩固了倒数、求解函数值等相关知识。
最优化算法实验报告(附Matlab程序)

最优化方法(Matlab)实验报告—— Fibonacci 法一、实验目的:用MATLAB 程序实现一维搜索中用Fibonacc 法求解一元单峰函数的极小值问题。
二、实验原理:(一)、构造Fibonacci 数列:设数列{}k F ,满足条件:1、011F F ==2、11k k k F F F +-=+则称数列{}k F 为Fibonacci 数列。
(二)、迭代过程:首先由下面的迭代公式确定出迭代点:111(),1,...,1(),1,...,1n k k k k k n k n k k k k k n k F a b a k n F Fu a b a k n F λ---+--+=+-=-=+-=-易验证,用上述迭代公式进行迭代时,第k 次迭代的区间长度缩短比率恰好为1n kn k F F --+。
故可设迭代次数为n ,因此有 11121211221111223231()()......()()n n n n n n n n nF F F F F F b a b a b a b a b a F F F F F F F ------=-=⨯-==⨯-=- 若设精度为L ,则有第n 次迭代得区间长度 111()n n nb a Lb a LF -≤-≤ ,即就是111()nb a L F -≤,由此便可确定出迭代次数n 。
假设第k 次迭代时已确定出区间 [,]k k a b 以及试探点,[,]k k k k u a b λ∈并且k k u λ<。
计算试探点处的函数值,有以下两种可能: (1) 若()()k k f f u λ>,则令111111111,,()()()k k k kk k k k n k k k k k n ka b b f f F a b a F λλμλμμ++++--++++-=====+-计算 1()k f μ+的值。
(2)()()k k f f u λ≤,则令111121111,,()()()k k k kk k k k n k k k k k n ka ab f f F a b a F μμλμλλ++++--++++-=====+-计算1()k f λ+ 的值。
最优化实验报告
最优化实验报告引言最优化问题是在给定一组约束条件下寻找使目标函数达到最优值的变量值的过程。
在现实世界中,最优化问题广泛应用于各个领域,例如经济学、工程学和计算机科学等。
本实验报告旨在介绍最优化实验的一般步骤,并通过一个具体例子来说明。
实验步骤步骤一:明确问题在开始最优化实验之前,首先要明确问题。
明确问题包括确定目标函数和约束条件。
目标函数是需要优化的函数,约束条件是对变量的限制。
步骤二:选择优化算法根据问题的特点和要求,选择适当的优化算法。
常见的优化算法包括梯度下降法、遗传算法和模拟退火算法等。
选择合适的算法可以提高最优化问题的求解效率和精度。
步骤三:建立数学模型在进行最优化算法的实现之前,需要将问题转化为数学模型。
数学模型描述了目标函数和约束条件之间的关系。
建立数学模型可以帮助我们更好地理解问题,并为后续的实验提供准确的求解方法。
步骤四:实现算法根据选择的优化算法和建立的数学模型,实现相应的算法。
使用编程语言编写代码,根据数学模型和算法的要求进行计算和优化。
步骤五:分析结果在完成算法的实现后,需要分析优化结果。
分析结果包括计算目标函数的最优值和最优解,并对结果进行可视化展示。
通过分析结果,可以评估算法的性能和有效性。
步骤六:优化实验根据分析结果,对实验进行优化。
优化实验可以包括调整算法的参数、改进数学模型和修改约束条件等。
通过多次优化实验,可以逐步提高算法的性能和求解效果。
实例分析我们以一个简单的线性规划问题为例来说明最优化实验的步骤。
假设我们有两种产品A和B,每个产品的利润分别为3和5。
产品A需要2个单位的资源1和3个单位的资源2,产品B需要1个单位的资源1和2个单位的资源2。
现在我们需要决定生产多少个产品A和B,使得总利润最大,同时满足资源的限制条件。
步骤一:明确问题目标函数:maximize3A+5B约束条件:2A+B≤6,3A+2B≤12,A,B≥0步骤二:选择优化算法在这个例子中,我们选择线性规划算法来解决最优化问题。
最优化实验报告(单纯形法的matlab程序,lingo程序)

最优化实验报告(单纯形法的matlab程序,lingo程序)实验一:线性规划单纯形算法一、实验目的通过实验熟悉单纯形法的原理,掌握Matlab 循环语句的应用,提高编程的能力和技巧。
二、实验用仪器设备、器材或软件环境Windows Xp 操作系统 ,Matlab6.5,计算机三、算法对于一般的标准形式线性规划问题(求极小问题),首先给定一个初始基本可行解。
设初始基为B,然后执行如下步骤:(1).解B Bx b =,求得1Bx B b -=,0,N B B x f c x ==令计算目标函数值 1(1,2,...,)i m B bi -=i 以b 记的第个分量(2).计算单纯形乘子w, B wB C =,得到1B wC B -=,对于非基变量,计算判别数1i i i B i i z c c B p c σ-=-=-,令 max{}k i i i Rz c σ∈=-,R 为非基变量集合若判别数0k σ≤ ,则得到一个最优基本可行解,运算结束;否则,转到下一步(3).解k k By p =,得到1k k y B p -=;若0k y ≤,即k y 的每个分量均非正数,则停止计算,问题不存在有限最优解,否则,进行步骤(4). (4).确定下标r,使{}min ,0t rrktktk b b tk y y t y y >=>且r B x 为离基变量。
k x 为进基变量,用k p 替换r B p ,得到新的基矩阵B ,返回步骤(1)。
对于极大化问题,可以给出完全类似的步骤,只是确定进基变量的准则不同。
对于极大化问题,应令min{}k k j j z c z c -=-四、计算框图是否是否开始初始可行解B令1,0,BN B B x B b b x f c x -====计算单纯形乘子1B w c B -=,计算判别数,i j j wp c j R σ=-∈(非基变量)令max{,}kj j R σσ=∈0?k σ≤得到最优解解方程kk By p =,得到1k k y B p -=。
最优化方法课程实验报告
项目一 一维搜索算法(一)[实验目的]编写加步探索法、对分法、Newton 法的程序。
[实验准备]1.掌握一维收搜索中搜索区间的加步探索法的思想及迭代步骤; 2.掌握对分法的思想及迭代步骤; 3.掌握Newton 法的思想及迭代步骤。
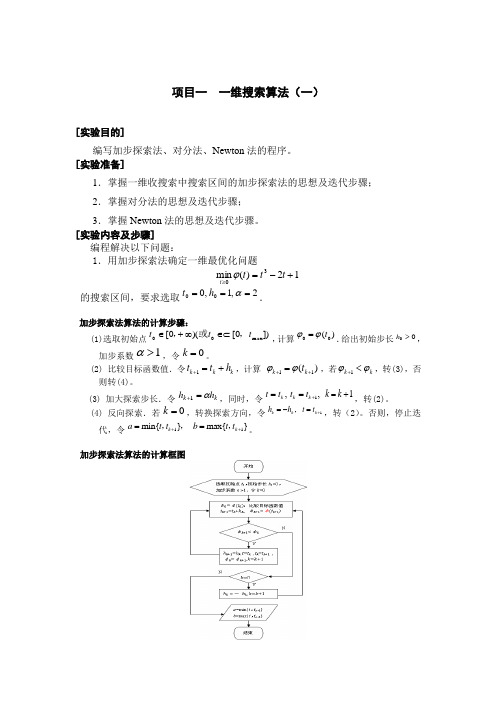
[实验内容及步骤] 编程解决以下问题:1.用加步探索法确定一维最优化问题的搜索区间,要求选取.加步探索法算法的计算步骤: (1)选取初始点,计算.给出初始步长,加步系数,令。
(2) 比较目标函数值.令k k k h t t +=+1,计算 )(11++=k k t ϕϕ,若k k ϕϕ<+1,转(3),否则转(4)。
(3) 加大探索步长.令,同时,令,转(2)。
(4) 反向探索.若,转换探索方向,令,转(2)。
否则,停止迭代,令。
加步探索法算法的计算框图12)(min 30+-=≥t t t t ϕ2,1,000===αh t ])0[)(0[max 00t t t ,或,∈⊂∞+∈)(00t ϕϕ=0>h 1α>0=k k k h h α=+1,k t t =,1+=k k t t 1k k =+0=k ,k k h h -=1+=k t t 11min{}max{}k k a t t b t t ++==,,,程序清单加步探索法算法程序见附录1实验结果运行结果为:2.用对分法求解,已知初始单谷区间,要求按精度,分别计算.对分法迭代的计算步骤:(1)确定初始搜索区间],[b a ,要求。
(2) 计算],[b a 的中点)(21b ac +=. (3) 若0)(<'c ϕ,则c a = ,转(4);若0)(='c ϕ,则c t =*,转(5);若0)(>'c ϕ,则c b = ,转(4).)2()(min +=t t t ϕ]5,3[],[-=b a 3.0=ε001.0=ε'()0'()0a b ϕϕ<>,(4) 若ε<-||b a ,则)(21*b a t +=,转(5);否则转(2). (5) 打印*t ,结束对分法的计算框图程序清单对分法程序见附录2实验结果运行结果为:3.用Newton 法求解,已知初始单谷区间,要求精度.Newton 法的计算步骤12)(min 3+-=t t t ϕ]1,0[],[=b a 01.0=ε(1) 确定初始搜索区间],[b a ,要求 (2) 选定0t(3) 计算(4) 若 ε≥-||0t t ,则t t =0,转(3);否则转(5). (5) 打印 ,结束.Newton 法的计算框图程序清单Newton 法程序见附录3实验结果运行结果为:'()0'()0a b ϕϕ<>,000'()/"()t t t t ϕϕ=-()t t ϕ,项目二 一维搜索算法(二)[实验目的]编写黄金分割法、抛物线插值法的程序。
最优化实验报告
最优化方法综合训练一、实验目的通过matlab 上机编程加深对线性规划问题的理解,初步认识线性支持向量机(LSVM )。
二、实验要求线性支持向量机的数学模型如下:min w b δξ、、、 δ+C{∑=ni 1ξi } (1) s.t. (,)1i i i y w x b ξ<>++≥ ,i=1,2,……l i w δ≤, i=1,2,……l0i ξ≥,i=1, 2,……l其分类规则为: f(x)=sgn{<*w ,x>+*b } (2) 这里*w ,*b 是模型(1)的最优解,x 是待预测类别标号的样本。
要求生成训练集和测试集,根据给定的训练集,求解模型(1),并用分类规则(2)来预测测试集样本的类别,分别给出训练集和测试集的判准率,并给出所求得的*w ,*b 。
三、实验步骤1.生成训练集和测试集。
利用rand 函数生成随机数,因为rand()生成的随机数是均匀分布的,随机数大于0.3的概率即为70%,小于等于0.3的概率为30%,同理可以处理分类时的80%概率。
给定数据库规模为(m+m1)×n ,其中m 为训练样本数,m1为测试样本数,n 为每个样本的属性个数。
这里取m=200,m1=100,n=10。
2.求解模型(1)。
利用matlab的optim工具箱中的linprog()函数。
其一般格式为:x = linprog(f,A,b,Aeq,beq,lb,ub)其中f为目标函数系数矩阵,A为约束条件系数矩阵,b为不等式约束右侧的常数矩阵,lb为变量的下界。
Ub为变量的上界。
给定的训练样本集数目为200,根据这200个求解方程(1),先确定解向量X的分量。
根据题目给出的方程,解向量X的分量处理如下:1)分量1到分量10为w,i=1……10;i2)分量11为b;3)分量12为δ;3)分理13到分量212为ξ,i=1……200;i即X有212个分量。
又因为约束方程有220个,因此A为220x212矩阵,b为220x1矩阵,f 为1x212矩阵。
最优化实验报告
《最优化方法及其应用》课 程 实 验 报 告一、 实验内容项目一 一维搜索算法(一) [实验目的]编写加步探索法、对分法、Newton 法的程序。
[实验学时]2学时[实验准备]1.掌握一维收搜索中搜索区间的加步探索法的思想及迭代步骤;2.掌握对分法的思想及迭代步骤;3.掌握Newton 法的思想及迭代步骤。
[实验内容及步骤]编程解决以下问题:1.用加步探索法确定一维最优化问题12)(min 30+-=≥t t t t ϕ的搜索区间,要求选取2,1,000===αh t .2.用对分法求解)2()(min +=t t t ϕ,已知初始单谷区间]5,3[],[-=b a ,要求按精度3.0=ε,001.0=ε分别计算.3.用Newton 法求解12)(min 3+-=t t t ϕ,已知初始单谷区间]1,0[],[=b a ,要求精度01.0=ε.项目二 一维搜索算法(二)[实验目的]编写黄金分割法、抛物线插值法的程序。
[实验学时]2学时[实验准备]1.掌握黄金分割法的思想及迭代步骤;2.掌握抛物线插值法的思想及迭代步骤。
[实验内容及步骤]编程解决以下问题:1.用黄金分割法求解)2()(min +=t t t ϕ,已知初始单谷区间]5,3[],[-=b a ,要求精度001.0=ε.2.用抛物线插值法求解3728)(min 23+--=x x x x f ,已知初始单谷区间001.0]20[][==ε,,,b a .项目三 常用无约束最优化方法(一)[实验目的]编写最速下降法、Newton 法(修正Newton 法)的程序。
[实验学时]2学时[实验准备]1.掌握最速下降法的思想及迭代步骤。
2.掌握Newton 法的思想及迭代步骤;3.掌握修正Newton 法的思想及迭代步骤。
[实验内容及步骤]编程解决以下问题:1.用最速下降法求22120min ()25[22]0.01T f X x x X ε=+==,,,.2.用Newton 法求22121212min ()60104f X x x x x x x =--++-,初始点0[00]0.01T X ε==,,. 3.用修正Newton 求221212min ()4(1)2(1)10f X x x x x =++-+++,初始点0[00]0.01T X ε==,,.项目四 常用无约束最优化方法(二)[实验目的]编写共轭梯度法、变尺度法(DFP 法和BFGS 法)程序。
最优化方法课程实验报告
项目一 一维搜索算法(一)[实验目的]编写加步探索法、对分法、Newton 法的程序。
[实验准备]1.掌握一维收搜索中搜索区间的加步探索法的思想及迭代步骤; 2.掌握对分法的思想及迭代步骤;3.掌握Newton 法的思想及迭代步骤。
[实验内容及步骤]编程解决以下问题:1.用加步探索法确定一维最优化问题的搜索区间,要求选取.加步探索法算法的计算步骤: (1)选取初始点,计算.给出初始步长,加步系数,令。
(2) 比较目标函数值.令k k k h t t +=+1,计算 )(11++=k k t ϕϕ,若k k ϕϕ<+1,转(3),否则转(4)。
(3) 加大探索步长.令,同时,令,转(2)。
(4) 反向探索.若,转换探索方向,令,转(2)。
否则,停止迭代,令。
加步探索法算法的计算框图12)(min 30+-=≥t t t t ϕ2,1,000===αh t ])0[)(0[max 00t t t ,或,∈⊂∞+∈)(00t ϕϕ=00>h 1α>0=k k k h h α=+1,k t t =,1+=k k t t 1k k =+0=k ,k k h h -=1+=k t t 11min{}max{}k k a t t b t t ++==,,,程序清单加步探索法算法程序见附录1实验结果运行结果为:2.用对分法求解,已知初始单谷区间,要求按精度,分别计算.对分法迭代的计算步骤:(1)确定初始搜索区间],[b a ,要求。
(2) 计算],[b a 的中点)(21b ac +=. (3) 若0)(<'c ϕ,则c a = ,转(4);若0)(='c ϕ,则c t =*,转(5);若0)(>'c ϕ,则c b = ,转(4).(4) 若ε<-||b a ,则)(21*b a t +=,转(5);否则转(2).(5) 打印*t ,结束对分法的计算框图)2()(min +=t t t ϕ]5,3[],[-=b a 3.0=ε001.0=ε'()0'()0a b ϕϕ<>,程序清单对分法程序见附录2实验结果运行结果为:3.用Newton 法求解,已知初始单谷区间,要求精度.Newton 法的计算步骤(1) 确定初始搜索区间],[b a ,要求 (2) 选定0t(3) 计算(4) 若 ε≥-||0t t ,则t t =0,转(3);否则转(5).(5) 打印 ,结束.Newton 法的计算框图12)(min 3+-=t t t ϕ]1,0[],[=b a 01.0=ε'()0'()0a b ϕϕ<>,000'()/"()t t t t ϕϕ=-()t t ϕ,程序清单Newton 法程序见附录3实验结果运行结果为:项目二 一维搜索算法(二)[实验目的]编写黄金分割法、抛物线插值法的程序。
实验报告时序分析和优化
实验报告时序分析和优化篇一:最优化实验报告最优化第一次实验报告班级:信息与计算科学 2 班姓名:陈鸿杰学号:201141410202一、模型求解:运用黄金分割法求得minφ=-1,最优解为:α=1。
第一次迭代点为:-第二次迭代点为:-二、程序代码:function [s,phis,k,G,E]=golds t=-1)/2;h=b-a;phia=feval;phib=feval;p=a+*h;q=a+t*h;phip=feval;phiq=feval;G=[a, p, q, b]; while>epsilon) ||if*h;phip=feval;elsea=p;phia=phip;p=q;phip=phiq;h=b-a;q=a+t*h;phiq=feval;endk=k+1; G=[a, p, q, b]; endds=abs;dphi=abs;ifs=p;phis=phip;elsephis=phiq;endE=[ds,dphi];三、模型求解:在Matlab命令窗口输入:[s,phis,k,G,E]=goldsx -2*x,-2,5,1e-5,1e-5) 程序运行结果:s =phis = -k = 29G = ---E = *[]篇二:时序实验报告实验报告实验项目名称时间序列数据平稳性检验实验室机房八所属课程名称时间序列分析实验类型软件操作实验日期班级金融保险统计学号2008119060姓名蔡志文成绩篇二:基本时序电路的实验报告专业:电气工程及自动化姓名:邓思原实验报告学号:3130103251 日期:1月5日地点:东三-310 课程名称:电路与电子技术实验ⅰ指导老师:李玉玲成绩:__________________ 实验名称:实验25时序逻辑电路设计、实验27脉冲分配器实验类型:_____ 同组学生姓名:__一、实验目的和要求1、加深理解时序电路的工作原理;2、学习时序电路的设计与调试;3、掌握时序集成电路的应用。
中北大学最优化实验报告
中北大学实验报告课程名:最优化方法任课教师:李卉专业:数学与应用数学学号:14080141姓名:2015/2016学年第2学期中北大学理学院《最优化方法》课程实验 第1次实验报告一、实验内容及基本要求实验项目名称:黄金分割法程序设计实验类型:设计型每组人数:1实验内容及要求:内容:能够应用MATLAB 或C++设计黄金分割法的程序,并用实例进行验证要求:能够独立完成程序的设计及验证二、实验题目利用黄金分割法求函数()232tan x x x φ=-在[]0,1上的极小点。
取容许误差410ε-=,510δ-=三、实验步骤及结果1)、建立y 函数M 文件(fun_gs.m )function y= fun_gs(x)y=3*x^2-2*tan(x);end2)、建立求解极小值点的M 文件(Untitled5.m )function gs(x)a=0;b=1;eps=0.0001;i=100;a1=b-0.618*(b-a);a2=a+0.618*(b-a);y1=fun_gs(a1);y2=fun_gs(a2);for k=1:i;if (abs(b-a)<=eps)y=fun_gs((b+a)/2);break;elseif (y1<=y2)y2=fun_gs(a1);b=a2;a2=a1;a1=b-0.618*(b-a);y1=fun_gs(a1);elsey1=fun_gs(a2);a=a1;a1=a2;a2=a+0.618*(b-a);y2=fun_gs(a2);endi=i+1;endendia0=(b+a)/2y=fun_gs((b+a)/2)end实验结果:根据实验结果可知:迭代次数i =120 ,极小值点a0 =0.3895 ,在极小点处的函数值为y =-0.3658.《最优化方法》课程实验 第2次实验报告一、实验内容及基本要求实验项目名称:牛顿法程序设计实验类型:设计型每组人数:1实验内容及要求:内容:能够应用MATLAB 或C++设计牛顿法的程序,并用实例进行验证要求:能够独立完成程序的设计及验证二、实验题目利用牛顿法程序求解()()()2222121min 431x R f x x x x ∈=-+-该问题有精确解()()1,1,0T x f x **==。
最优化方法(黄金分割和进退法)实验报告

一维搜索方法的MATLAB 实现__ __信息与计算科学__ 实验时间: 2014/6/21一、实验目的:通过上机利用Matlab 数学软件进行一维搜索,并学会对具体问题进行分析。
并且熟悉Matlab 软件的实用方法,并且做到学习与使用并存,增加学习的实际动手性,不再让学习局限于书本和纸上,而是利用计算机学习来增加我们的学习兴趣。
二、实验背景: 黄金分割法它是一种基于区间收缩的极小点搜索算法,当用进退法确定搜索区间后,我们只知道极小点包含于搜索区间内,但是具体哪个点,无法得知。
1、算法原理黄金分割法的思想很直接,既然极小点包含于搜索区间内,则可以不断的缩小搜索区间,就可以使搜索区间的端点逼近到极小点。
2、算法步骤用黄金分割法求无约束问题min (),f x x R ∈的基本步骤如下:〔1〕选定初始区间11[,]a b 与精度0ε>,计算试探点:11110.382*()a b a λ=+-11110.618*()a b a μ=+-。
〔2〕若k k b a ε-<,则停止计算。
否则当()()k k f f λμ>时转步骤〔3〕。
当()()k k f f λμ≤转步骤〔4〕。
〔3〕11111110.382*()k k k k k kk k k k a b b a b a λλμμ+++++++=⎧⎪=⎪⎨=⎪⎪=+-⎩转步骤〔5〕〔4〕转步骤〔5〕(5)令1k k =+,转步骤〔2〕。
算法的MATLAB 实现function xmin=golden(f,a,b,e)k=0;x1=a+0.382*(b-a);x2=a+0.618*(b-a);while b-a>ef1=subs(f,x1);f2=subs(f,x2);if f1>f2a=x1;x1=x2;f1=f2;x2=a+0.618*(b-a);elseb=x2;x2=x1;f2=f1;x1=a+0.382*(b-a);endk=k+1;endxmin=(a+b)/2;fmin=subs(f,xmin)fprintf('k=\n');disp(k);3、实验结果(总结/方案)黄金分割法求解极值实例。
最优化实验报告
最优化实验报告最优化实验报告引言:最优化是一种重要的数学方法,它在各个领域都有广泛的应用。
本实验旨在通过一个具体的案例,探索最优化方法在实际问题中的应用,以及优化算法对问题求解的效果。
一、问题描述:本实验中,我们将研究一个经典的最优化问题:背包问题。
背包问题是一个组合优化问题,目标是在给定的背包容量下,选择一组物品放入背包,使得背包中物品的总价值最大化。
具体来说,我们有一组物品,每个物品有一个重量和一个价值,背包有一定的容量限制。
我们的目标是选择一组物品,使得它们的总重量不超过背包容量,且总价值最大。
二、问题分析:背包问题是一个经典的组合优化问题,可以用多种方法求解。
在本实验中,我们将尝试使用两种常见的最优化算法:贪心算法和动态规划算法。
1. 贪心算法:贪心算法是一种简单但有效的最优化方法。
它每次选择当前看起来最优的解,然后逐步构建最终解。
在背包问题中,贪心算法可以按照物品的单位价值(即价值与重量的比值)进行排序,然后依次选择单位价值最高的物品放入背包。
贪心算法的优点是简单快速,但是它不能保证得到全局最优解。
2. 动态规划算法:动态规划算法是一种更为复杂但准确的最优化方法。
它通过将原问题分解为若干子问题,并保存子问题的解,最终得到全局最优解。
在背包问题中,动态规划算法可以通过构建一个二维表格来保存子问题的解,然后逐步计算出最终解。
动态规划算法的优点是能够得到全局最优解,但是它的时间和空间复杂度较高。
三、实验设计与结果分析:为了验证贪心算法和动态规划算法在背包问题中的效果,我们设计了一个实验。
我们随机生成了一组物品,每个物品的重量和价值都在一定范围内。
然后,我们分别使用贪心算法和动态规划算法求解背包问题,并比较它们的结果。
实验结果显示,贪心算法在求解背包问题时速度较快,但是得到的解并不一定是最优解。
而动态规划算法虽然耗时较长,但是能够得到全局最优解。
这说明在背包问题中,贪心算法是一种可行但不保证最优的方法,而动态规划算法是一种准确但复杂的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最优化方法课程设计报告班级:________________: ______学号: __________成绩:2017年 5月 21 日目录一、摘要 (1)二、单纯形算法 (2)1.1 单纯形算法的基本思路 (2)1.2 算法流程图 (3)1.3 用matlab编写源程序 (4)二、黄金分割法 (7)2.1 黄金分割法的基本思路 (7)2.2 算法流程图 (8)2.3 用matlab编写源程序 (9)2.4 黄金分割法应用举例 (11)三、最速下降法 (11)3.1 最速下降法的基本思路 (11)3.2 算法流程图 (13)3.3 用matlab编写源程序 (13)3.4 最速下降法应用举例 (13)四、惩罚函数法 (17)4.1 惩罚函数法的基本思路 (17)4.2 算法流程图 (18)4.3 用matlab编写源程序 (18)4.4 惩罚函数法应用举例 (19)五、自我总结 (20)六、参考文献 (20)一、摘要运筹学是一门以人机系统的组织、管理为对象,应用数学和电脑等工具来研究各类有限资源的合理规划使用并提供优化决策方案的科学。
通过对数据的调查、收集和统计分析,以及具体模型的建立。
收集和统计上述拟定之模型所需要的各种基础数据,并最终将数据整理形成分析和解决问题的具体模型。
最优化理论和方法日益受到重视,已经渗透到生产、管理、商业、军事、决策等各个领域,而最优化模型与方法广泛应用于工业、农业、交通运输、商业、国防、建筑、通信、政府机关等各个部门及各个领域。
伴随着电脑技术的高速发展,最优化理论与方法的迅速进步为解决实际最优化问题的软件也在飞速发展。
其中,MATLAB软件已经成为最优化领域应用最广的软件之一。
有了MATLAB这个强大的计算平台,既可以利用MATLAB优化工具箱〔OptimizationToolbox〕中的函数,又可以通过算法变成实现相应的最优化计算。
关键词:优化、线性规划、黄金分割法、最速下降法、惩罚函数法二、单纯形算法1.1 单纯形算法的基本思路线性规划问题的可行域是n维向量空间Rn中的多面凸集,其最优值如果存在必在该凸集的某顶点处到达。
顶点所对应的可行解称为基本可行解。
单纯形法的基本思想是:先找出一个基本可行解,对它进行鉴别,看是否是最优解;假设不是,则按照一定法则转换到另一改良的基本可行解,再鉴别;假设仍不是,则再转换,按此重复进行。
因基本可行解的个数有限,故经有限次转换必能得出问题的最优解。
如果问题无最优解也可用此法判别。
单纯形法是从某一基可行解出发,连续地寻找相邻的基可行解,直到到达最优的迭代过程,其实质是解线性方程组。
概述:根据单纯形法的原理,在线性规划问题中,决策变量〔控制变量〕x1,x2,…x n的值称为一个解,满足所有的约束条件的解称为可行解。
使目标函数到达最大值〔或最小值〕的可行解称为最优解。
这样,一个最优解能在整个由约束条件所确定的可行区域内使目标函数到达最大值〔或最小值〕。
求解线性规划问题的目的就是要找出最优解。
用单纯形法求解线性规划问题所需的迭代次数主要取决于约束条件的个数。
现在一般的线性规划问题都是应用单纯形法标准软件在电脑上求解,对于具有106个决策变量和104个约束条件的线性规划问题已能在电脑上解得。
求解时可能出现以下情况之一:①存在着一个最优解;②存在着无穷多个最优解;③不存在最优解,这只在两种情况下发生,即没有可行解或各项约束条件不阻止目标函数的值无限增大〔或向负的方向无限增大〕。
要缩小对最优解的搜索范围,就必须认识最优解的一般性质,最优解如果存在的话,则它必然处于可行区域的边界上。
任何一项约束条件的边界方程是用“=”号来替换该约束条件中的“≤”或“≥”号而得到的。
每一个边界方程确定一个超平面。
因此,可行区域的边界是由那些满足一个或同时满足几个边界方程〔即处在作为边界的一个或几个超平面上〕的可行解所组成,而且最优解必在其中。
最优解不仅是在可行区域的边界上,而且也在这个区域的一个隅角上。
一个可行解,如果不处在由另两个可行解连接起来的任何线段上,它就是一个角点可行解。
如果连接两个角点可行解的线段处在可行区域的边界上,这两个角点可行解就称为相邻的角点可行解。
角点可行解具有以下三个重要性质:①如果存在着一个最优解,那么它必定是角点可行解。
如果存在有多个最优解,那么至少有两个最优解必定是相邻的角点可行解。
②只存在有限个数的角点可行解。
③如果一个角点可行解按目标函数值来衡量时比其所有的相邻角点可行解更好一些,那它就比所有其他角点可行解都更好,也就是最优解。
上述这些性质构成单纯形法的原理基础。
最后一个性质的重要性在于它为一个角点可行解是否是最优解提供了一种简便的检验标准,因而毋需列举所有的可行解。
单纯形法正是利用了这个性质,只要检查少数的角点可行解,并且一旦这个最优性检验获得通过就可立即停止运算。
1.2 算法流程图〔1〕、确定初始基可行解①从线性规划标准形的系数矩阵中能直接找出m个线性独立的单位向量;②对约束条件全为“<=”连接的LP,化为标准形,左端添加松弛变量后即形成一个单位子矩阵;③约束条件中含有“<=”或“=”连接的方程,在插入剩余变量后找不到单位矩阵,则必须采用“人造基”法,〔2〕、单纯形法的运算步骤可归结为:①起始步骤──在一个角点可行解上开始。
②迭代步骤──移动至一个更好一些的相邻角点可行解〔根据需要反复进行这一步骤〕。
③停止法则──在当前角点可行解比所有相邻角点可行解都更好些时停止。
当前角点可行解就是一个最优解。
单纯形法的优点及其成功之处在于它只需要较少的有限次数的迭代,即可找到最优解。
〔3〕、单纯形法的算法流程如下:①把线性规划问题的约束方程组表达成典范型方程组,找出基本可行解作为初始基本可行解。
②假设基本可行解不存在,即约束条件有矛盾,则问题无解。
③假设基本可行解存在,从初始基本可行解作为起点,根据最优性条件和可行性条件,引入非基变量取代某一基变量,找出目标函数值更优的另一基本可行解。
④按步骤3进行迭代,直到对应检验数满足最优性条件〔这时目标函数值不能再改善〕,即得到问题的最优解。
⑤假设迭代过程中发现问题的目标函数值无界,则终止迭代。
1.3 用matlab编写源程序Matlab程序源代码:----------- simplexTab.m子函数-------------------------------------------------------- function simplexTab(mat,numFreeVar)maxRow=length(mat(:,1));maxCol=length(mat(1,:));objEntryExcludingMaxPayOff=mat(maxRow,1:maxCol-2);[objEnt bestColToPivot]=min(objEntryExcludingMaxPayOff);while(objEnt<0)lastColExcludingObjEnty=mat(1:(maxRow-1),maxCol);ithColExcludingObjEnty=mat(1:(maxRow-1),bestColToPivot);a=lastColExcludingObjEnty./ithColExcludingObjEnty;[val bestRowToPivot]=min(a);sprintf('the best Pivot is %d row and %d col ',bestRowToPivot,bestColToPivot) disp('单纯形表化为:');[mat,[a;0]]disp('按任意键继续');pause;if(val<0)[s indices]=sort(a);if(max(a)>0)count=1;while(s(count)<0)count=count+1;endbestRowToPivot=indices(count);endendif(length(a)==0)length(a)returnendmat=pivot(mat,bestRowToPivot,bestColToPivot);objEntryExcludingMaxPayOff=mat(maxRow,1:maxCol-2);[objEnt bestColToPivot]=min(objEntryExcludingMaxPayOff);endsprintf('the best Picot is %d 行and %d 列',bestRowToPivot,bestColToPivot) disp('单纯形表化为:');[mat,[a;0]]disp('运行结束!');--------------------------------------------------------------- ----------- interChange .m子函数-------------------------------------------------------function newMat=interChange(mat,row1,row2) temp=mat(row1,:);mat(row1,:)=mat(row2,:); mat(row2,:)=temp; newMat=mat;--------------------------------------------------------------- -----------multiFromRowToRow.m 子函数-------------------------------------------- function newMat=multiFromRowToRow(mat,fromRow,toRow,multiplier) rG=mat(fromRow,:)*multiplier; mat(toRow,:)=rG+mat(toRow,:); newMat=mat;--------------------------------------------------------------- -----------multMat.m 子函数------------------------------------------------------------- fuction newMat=multMat(mat,row,mult)%multiply a row of a matrix by a nonzero constant mat(row,:)=mat(row,:)*mult; newMat=mat;--------------------------------------------------------------- -----------pivot.m 子函数------------------------------------------------------------------- function newMat=pivot(mat,row,col) %normalize this rowmat(row,:)=mat(row,:)./mat(row,col);%make the leadinga number a 1 for r=1:length(mat(:,1)) if(r~=row)mat=multiFromRowToRow(mat,row,r,-mat(r,col)); end endnewMat=mat;-----------------------------------------------------------------------------------------------1.4 单纯形算法应用举例题目: 使用单纯形法解下面线性规划问题:目标函数为:321max x x x f ---=; 约束条件是: 1937321≤++x x x..t s1458321≤++x x x1596321≤++x x x0,,321≥x x x解:化为标准形式:654321000max x x x x x x g +++++= 100937654321=+++++x x x x x x..t s100458654321=+++++x x x x x x 100596654321=+++++x x x x x x0,,,,,654321≥x x x x x x利用Matlab 程序计算:命令窗口输入:mat=[7 3 9 1 0 0 1; 8 5 4 0 1 0 1; 6 9 5 0 0 1 1; -1 -1 -1 0 0 0 0];numFreeVar=3;%自由变量个数 simplexTab(mat,numFreeVar) 结果输出: 初始结果:ans = the best Pivot is 2 row and 1 col 单纯形表化为:-1.0000 -1.0000 -1.0000 0 0 0 0 0第一次转换结果:ans = the best Pivot is 1 row and 3 col 单纯形表化为:0 -0.3750 -0.5000 0 0.1250 0 0.1250 0第二次转换结果:ans = the best Pivot is 1 row and 2 col 单纯形表化为:0 -0.5000 0 0.0909 0.0455 0 0.1364 0第三次转换结果:ans = the best Picot is 3 row and 1 col)0356.0,0870.0,0316.0(=x ,1542.0=g ,1542.0321-=---=x x x f所以该线性规划的最优解是1542.0=g 。