单片机控制的步进电机自适应调速方法
基于单片机的步进电机调速系统

平顶山学院本科毕业论文(设计)基于单片机的步进电机调速系统设计董煜明PINGDINGSHAN UNIVERSITY毕业设计基于单片机的题目: 步进电机调速系统设计院(系): 电气信息工程学院专业年级: 电气工程及其自动化11级姓名: 董煜明学号: 111220102指导教师: 南亚明助教2015年4月28日原创性声明本人郑重声明:本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。
毕业论文中凡引用他人已经发表或未发表的成果、数据、观点等,均已明确注明出处。
除文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的科研成果。
对本文的研究成果做出重要贡献的个人和集体,均已在文中以明确方式标明。
本声明的法律责任由本人承担。
论文作者签名:日期:关于毕业论文使用授权的声明本人在指导老师指导下所完成的论文及相关的资料(包括图纸、试验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属平顶山学院。
本人完全了解平顶山学院有关保存、使用毕业论文的规定,同意学校保存或向国家有关部门或机构送交论文的纸质版和电子版,允许论文被查阅和借阅;本人授权平顶山学院可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存和汇编本毕业论文。
如果发表相关成果,一定征得指导教师同意,且第一署名单位为平顶山学院。
本人离校后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为平顶山学院。
论文作者签名:日期:指导老师签名:日期:基于单片机的步进电机调速系统设计摘要步进电机是一种数字控制电机,本设计是使用单片机对步进电机调速设计,采用了AT89C51型单片机,并设计了相应的时钟电路,驱动电路等。
实现了步进电机的速度调整以及正转反转的设计目标。
利用单片机对步进电机进行调速设计,具有成本低,性价比高,系统相对简单等优点。
关键词:步进电机,单片机,调速系统Stepper motor speed control system design basedon MCU stepABSTRACTStepping motor is a kind of digital control of the motor, the electric pulse signal into angular displacement or linear displacement, compared with other types of motors, stepper motor without accumulated error and easy to open loop control. The stepper motor speed control using single chip computer, which has the advantages of low cost, high performance price ratio, has the advantages of relatively simple system etc.. This design uses the AT89C51 microcontroller to control the stepper motor, can adjust the speed of the stepper motor and the design goal is to reverse.Keywords: stepper motor, microcontrollers, speed control system目录1 绪论 (1)1.1学术背景及研究意义 (1)1.1.1 步进电机的基本类型 (1)1.1.2 步进电机现有控制办法 (1)1.1.3 当前步进电机控制系统的缺点与未来发展趋势 (1)1.1.4 国内外研究概况 (2)1.1.4 研究意义及研究目的 (2)1.1.5 研究内容 (2)1.2 论文内容安排 (3)2 步进电机概述 (4)2.1 步进电机的特点 (4)2.2 步进电机的工作原理 (4)2.3 步进电机的工作方式 (4)2.4 三相步进电机 (5)2.5 步进电机技术参数 (6)3 硬件电路设计 (7)3.1系统结构图 (7)3.2 电路原理图 (7)3.3 AT89C51型单片机 (8)3.4 时钟电路 (9)3.5 显示电路 (10)3.6 驱动电路 (11)4 控制系统软件设计 (13)4.1步进电机调速概述 (13)4.2 主程序设计 (13)4.4键盘程序设计 (14)4.5 Proteus仿真 (14)5 结束语 (19)参考文献 (20)致谢 (21)1 绪论1.1学术背景及研究意义1.1.1 步进电机的基本类型步进电机在励磁方式上进行分类的话,大致可以分为三类,分别是定子上有绕组、的反应式步进电机,转子用永磁材料制成的永磁式步进电机,以及综合了反应式、永磁式优点的混合式步进电机。
基于单片机的步进电机调速系统设计

常州信息职业技术学院学生毕业设计(论文)报告系别:机电工程学院专业:机电一体化班号:机电122学生姓名:学生学号:设计(论文)题目:基于单片机的步进电机调速系统设计指导教师:设计地点:起迄日期:2014.6.23~2014.11.13毕业设计(论文)任务书专业机电一体化班级机电121 姓名许永康一、课题名称:基于单片机的步进电机调速系统设计二、主要技术指标:1.根据所选两相混合式步进电机的工作原理及性能指标,选择其伺服控制器的设计方案。
2.借助Keil 发平台,选用C语言完成对伺服系统各功能模块相应的程序的编写 3.在实验室条件下对伺服控制器进行调试、改进及验证。
三、工作内容和要求:1.了解步进电机调速的工作原理及其单片机控制的工作过程;2. 设计单片机步进电机调速控制系统,完成系统硬件电路的连接和调试;3. 编制程序实现步进电动机系统调速。
四、主要参考文献:__[1] 王冬青.可编程序控制器原理及应用[M].人民邮电出版社,2002.7[2] 王兆义.可编程序控制器教程[M].机械工业出版社,1999.10[3] 袁任光. 可编程序控制器应用技术实例[M].华南理工大学出版社,2000.4[4] 陈立定. 电气控制与可编程序控制器[M]. 华南理工大学出版社,2001.2学生(签名)年月日指导教师(签名)年月日教研室主任(签名)年月日系主任(签名)年月日毕业设计(论文)开题报告基于单片机的步进电机调速系统设计目录TOC \o "1-3" \h \u 摘要 (1)Abstract (2)第一章前言 (3)1.1步进电动机的简介 (3)1.2步进电机伺服控制的研究现状 (4)1.2.1国外步进电机伺服系统的发展现状 (4)1.2.2国内步进电机伺服系统的发展现状 (5)1.3步进电机伺服控制目前存在的主要问题 (6)第二章总体方案设计和步进电机的选择2. 1两相混合式步进电动机的工作过程 (8)2.1.1步进电动机的主要技术指标 (8)2.1.2两相混合式步进电机的结构 (8)2.1.3两相混合式步进电机的工作原理 (9)2.1.4两相混合式步进电机的样机简介 (9)2.2控制原理及控制系统分类 (10)2.2.1控制原理及应用 (10)2.2.2控制系统的分类 (11)第三章步进电动机伺服控制器的设计 (12)3. 1步进电动机伺服控制器的硬件组成 (12)3.1.1主控制模块 (12)3.1.2驱动控制模块 (12)3.1.3键盘显不模块 (15)3.1.4硬件抗干扰模块 (16)3.1.5步进电动机伺服控制器硬件电路原理图 (16)3.2步进电动机伺服控制器的软件实现 (17)3.2.1主程序的设计 (18)3.2.2系统调速模块的设计 (21)3.2.3按键显示模块的设计 (21)3.2.4外部中断模块的设计 (22)第四章实验结果及分析 (24)4.1 圈数测试结果 (26)4.2 转速调整测试结果 (26)第五章结束语 (27)参考文献 (28)答谢辞 (29)摘要步进电机具有快速启停能力强, 精度高, 转速容易控制等特点, 在工业过程控制及仪表等领域中得到了越来越广泛的应用。
基于单片机控制的步进电动机调速系统设计
论文题目:基于单片机控制的步进电动机调速系统设计摘要步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
步进电机的调速一般是改变输入步进电机的脉冲的频率来实现步进电机的调速,因为步进电机每给一个脉冲就转动一个固定的角度,这样就可以通过控制步进电机的一个脉冲到下一个脉冲的时间间隔来改变脉冲的频率,延时的长短来具体控制步进角来改变电机的转速,从而实现步进电机的调速。
在本设计方案中采用AT89C51型单片机内部的定时器改变CP脉冲的频率从而实现对步进电机的转速进行控制,实现电机调速与正反转的功能。
关键词:步进电机,单片机,调速系统Abstract:Step-by-step electric motor is the ring opening gating element changing electricity pulse signal into angular displacement or line displacement. Under the situation of must overload, the electric motor rotation rate , discontinuous location depend on pulse signal frequency and pulse number only , make free from being loaded with the effect changing ,but be that being added a pulse signal , the electric motor by electric motor is to have rotated a step spur angle. This gleam of the sexual relationships existence, adds step-by-step electric motor characteristics such as only having the cyclicity error but there being no accumulative error.Feasible simplicity controlling a field using step-by-step electric motor to come to control changeable extraordinary in speed , location etc.Step-by-step electric motor speed regulation general be change import step-by-step electric motor pulse frequency come true step-by-step electric motor speed regulation, because of step-by-step electric motor every be given to a pulse right away rotate one fixed angle, such right away not bad pass under the control of step-by-step electric motor a pulse arrive at next pulse period come to change pulse frequency,Come to control the speed regulation , realizing step-by-step electric motor thereby to come to change the electric motor rotation rate step-by-step angle concretely the deferred length. Frequency adopt the internal timer of AT89C51 type monolithic machine to change CP pulse in the design plan in realizes the speed regulation controlling , realizing an electric motor and the function that the positive and negative rotates being in progress to step-by-step electric motor rotation rate thereby.Key words:Step-by-step electric motor , monolithic machine , speed regulation system摘要 (1)Abstract: (2)第一章步进电机概述 (4)第一节步进电机的特点 (4)第二节步进电机的工作原理 (4)第三节步进电机的分类 (4)一步进电机分为三大类 (4)二步进电机的内外结构 (5)第四节步进电机详细调速原理 (6)第二章本次设计的基本要求 (6)第三章方案的论证 (6)第一节驱动方式的确定 (6)第二节基本方案的确定 (7)第四章硬件电路的设计 (7)第一节单片机的选择 (7)第二节驱动电路的选择 (8)第五章算法的设计 (11)第一节 PID 控制算法 (11)第六章软件的设计 (16)第一节显示子程序的设计 (16)第二节键盘子程序的设计 (16)第三节驱动程序流程的设计: (18)第四节正反转程序流程图 (19)一正反转程序流程图 (19)二转速快慢程序流程图 (20)三定时中断流程图 (21)第七章实验结果与分析 (22)第一节有关参数的计算与分析 (22)第二节理论与实际的分析 (22)结束语 (24)致谢 (24)参考文献 (25){{第一章步进电机概述第一节步进电机的特点1)一般步进电机的精度为步进角的3-5%,且不累积。
c语言实现单片机控制步进电机加减速源程序
C 语言实现单片机控制步进电机加减速源程序1. 引言在现代工业控制系统中,步进电机作为一种常见的执行元件,广泛应用于各种自动化设备中。
而作为一种常见的嵌入式软件开发语言,C 语言在单片机控制步进电机的加减速过程中具有重要的作用。
本文将从单片机控制步进电机的加减速原理入手,结合 C 语言的编程技巧,介绍如何实现单片机控制步进电机的加减速源程序。
2. 单片机控制步进电机的加减速原理步进电机是一种能够精确控制角度的电机,它通过控制每个步骤的脉冲数来实现旋转。
在单片机控制步进电机的加减速过程中,需要考虑步进电机的加速阶段、匀速阶段和减速阶段。
在加速阶段,需要逐渐增加脉冲的频率,使步进电机的转速逐渐增加;在匀速阶段,需要保持恒定的脉冲频率,使步进电机以匀速旋转;在减速阶段,需要逐渐减小脉冲的频率,使步进电机的转速逐渐减小。
这一过程需要通过单片机的定时器和输出控制来实现。
3. C 语言实现步进电机加减速的源程序在 C 语言中,可以通过操作单片机的 GPIO 来控制步进电机的旋转。
在编写源程序时,需要使用单片机的定时器模块来生成脉冲信号,以控制步进电机的旋转角度和速度。
以下是一个简单的 C 语言源程序,用于实现步进电机的加减速控制:```c#include <reg52.h>void main() {// 初始化定时器// 设置脉冲频率,控制步进电机的加减速过程// 控制步进电机的方向// 控制步进电机的启停}```4. 总结与回顾通过本文的介绍,我们了解了单片机控制步进电机的加减速原理和 C 语言实现步进电机加减速源程序的基本思路。
掌握这些知识之后,我们可以更灵活地应用在实际的嵌入式系统开发中。
在实际项目中,我们还可以根据具体的步进电机型号和控制要求,进一步优化 C 语言源程序,实现更加精准和稳定的步进电机控制。
希望本文能为读者在单片机控制步进电机方面的学习和应用提供一定的帮助。
5. 个人观点与理解在我看来,掌握 C 语言实现单片机控制步进电机加减速源程序的技术是非常重要的。
8051单片机对步进电机的控制及步进电机升降速曲线的设计
从 $%& 、 (图 3 所示) 可知 $%& 变 $’& 对的关系曲线 在相同的电流增量 "!" 下, 化不如 $’& 变化敏感, "$’& 比 "$%& 要大得多, 并且退饱和现象发生时, $%& 变化 也小, 因而难以掌握, 工业上一般采用 $’& 监测法对 012 进行保护。 采用 $’& 监测法的自保护驱动电路, 都存在一个 保护死区, 即在 012 启动脉冲区段。 012 在开启过程 开启时, 中, $’& $’& 要经历一个从高到低的动态过程, 很高, 保护电路不能打开, 否则, 就不能正常驱动 012。 只有等到 012 充分导通后才能打开保护电路。因此, 当逆变桥输出口长时间短路时, 则 012 会受到启动脉 冲区段内的短路电流冲击。该电路能否对 012 实现 短路保护, 就取决于此时死区功率损耗是否超 过 了 012 的承受能力。
图.
台阶拟合法编制升速曲线
图1
查表法编制升速曲线
./.
直线拟合 直线拟合的原理图如图 ’ 所示。它的方法是通过
在步进电机降速曲线的设计时, 也同样有这些方 法。由于在步进电机降速过程中, 步进电机力矩增大, 所以对步进电机降速曲线的要求比升速曲线低一些, 降速过程和升速过程并不对称。在降速过程中, 只要 保证电机不超步即可, 步进脉冲频率下降的幅度不可 过大, 否则步进电机会由于惯性作用而超步。因此, 以 上几种方法相比较, 台阶拟合比较简单, 也比较容易做 到步进电机在短时间内降速。这样做可以延长步进电 机的升速时间, 使得升速曲线的编制更加合理。在使 用台阶法编制降速曲线时, 频率跳跃可以比升速曲线 大很多。一般可以是升速曲线频率跳跃的 . 倍。本控 制系统降速曲线的设计就使用这种方法, 降速曲线由 三段台阶跳跃拟合而成。 (下转第 "4 页)
单片机控制步进电机调速实验
51系列单片机控制步进电机调速实验实验目的及要求:1、熟悉步进电机的工作原理2、熟悉51系列单片机的工作原理及调试方法3、设计基于51系列单片机控制的步进电机调速原理图(要求实现电机的速度反馈测量,测量方式:数字测量)4、实现51系列单片机对步进电机的速度控制(步进电机由实验中心提供,具体型号42BYG )由按钮控制步进电机的启动与停止;实现加速、匀速、和减速控制。
速度设定由键盘设定,步进电机的反馈速度由LED数码管显示。
实验原理:步进电机控制原理一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。
由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。
随着数字控制系统的发展,步进电动机的应用将逐渐扩大。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路根据控制信号工作,控制信号可以由单片机产生。
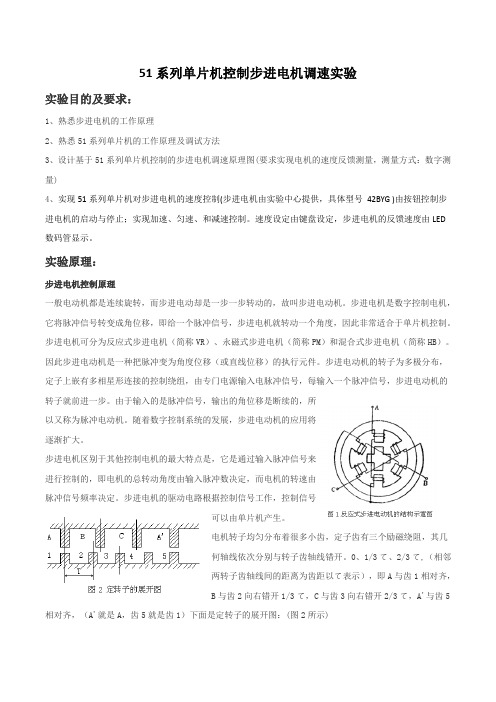
电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图2所示)图1 是反应式步进电动机结构示意图,它的定子具有均匀分布的六个磁极,磁极上绕有绕组。
基于单片机控制的步进电机调速系统的设计51单片机步进电机调速

基于单片机控制的步进电机调速系统的设计51单片机步进电机调速基于单片机控制的步进电机调速系统的设计|51单片机步进电机调速前言步进电机最早是在1920年由英国人所开发。
1950年后期晶体管的发明也逐渐应用在步进电机上,这对于数字化的控制变得更为容易。
以后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解性能、高响应性、信赖性等灵活控制性高的机械系统中。
在生产过程中要求自动化、省人力、效率高的机器中。
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
步进电机是将电脉冲信号变换成角位移或直线位移的执行部件。
步进电机可以直接用数字信号驱动,使用非常方便。
一般电动机都是连续转动的,而步进电动机则有定位和运转两种基本状态,当有脉冲输入时步进电动机一步一步地转动,每给它一个脉冲信号,它就转过一定的角度。
步进电动机的角位移量和输入脉冲的个数严格成正比,在时间上与输入脉冲同步,因此只要控制输入脉冲的数量、频率及电动机绕组通电的相序,便可获得所需的转角、转速及转动方向。
在没有脉冲输入时,在绕组电源的激励下气隙磁场能使转子保持原有位置处于定位状态。
因此非常适合于单片机控制。
步进电机还具有快速启动、精确步进和定位等特点,因而在数控机床,绘图仪,打印机以及光学仪器中得到广泛的应用。
步进电动机已成为除直流电动机和交流电动机以外的第三类电动机。
传统电动机作为机电能量转换装置,在人类的生产和生活进入电气化过程中起着关键的作用。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
第一章步进电机概述第一节步进电机的特点一般步进电机的特点有以下三个特点:1)一般步进电机的精度为步进角的3-5%,且不累积。
2)步进电机的力矩会随转速的升高而下降。
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。
51单片机驱动步进电机的方法
51单片机驱动步进电机的方法一、步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构,广泛应用于各种自动化设备中。
其工作原理是,当一个脉冲信号输入时,电机转动一个步距角,从而实现电机的精确控制。
二、51单片机驱动步进电机的方法1、硬件连接需要将51单片机与步进电机连接起来。
通常,步进电机需要四个引脚,分别连接到单片机的四个GPIO引脚上。
同时,还需要连接一个驱动器来提高电机的驱动能力。
2、驱动程序编写接下来,需要编写驱动程序来控制步进电机的转动。
在51单片机中,可以使用定时器或延时函数来产生脉冲信号,然后通过GPIO引脚输出给电机。
同时,还需要设置电机的步距角和转向,以保证电机的精确控制。
3、示例程序以下是一个简单的示例程序,用于演示如何使用51单片机驱动步进电机:cinclude <reg52.h> //包含51单片机的头文件sbit motorPin1=P1^0; //定义连接到P1.0引脚的电机引脚sbit motorPin2=P1^1; //定义连接到P1.1引脚的电机引脚sbit motorPin3=P1^2; //定义连接到P1.2引脚的电机引脚sbit motorPin4=P1^3; //定义连接到P1.3引脚的电机引脚void delay(unsigned int time) //延时函数unsigned int i,j;for(i=0;i<time;i++)for(j=0;j<1275;j++);void forward(unsigned int step) //正转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin1=1;motorPin3=1;motorPin2=0;motorPin4=0; //设置转向和步距角delay(step); //延时一段时间void backward(unsigned int step) //反转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin2=1;motorPin4=1;motorPin3=0;motorPin1=0; //设置转向和步距角delay(step); //延时一段时间void main() //主函数unsigned int step=1000; //设置步距角为1000微步forward(step); //正转一圈backward(step); //反转一圈while(1); //循环等待,保持电机转动状态在这个示例程序中,我们使用了四个GPIO引脚来控制步进电机的转动。
基于单片机步进电机速度控制

步进电机控制的历史与发展
历史
步进电机最初是由美国发明家哈罗德·斯普拉里在20世纪初发明的,当时主要 用于调节收音机的音量。随着技术的发展,步进电机逐渐应用于各种工业领 域。
发展
随着计算机技术和数字控制技术的不断发展,步进电机的控制精度和性能得 到了显著提升。单片机作为一种常见的控制芯片,被广泛应用于步进电机的 速度控制。
控制算法
控制算法是用来控制步进 电机旋转的程序,它通常 由定时器、计数器等组成 。
程序设计
程序设计是用来实现控制 算法的程序,它通常由C 语言、汇编语言等编写。
控制程序实现
通过将控制算法和程序设 计结合起来,可以实现步 进电机的速度控制和位置 控制。
03
硬件设计
单片机选型
总结词
选择低功耗、高性能的单片机
输入输出接口设计
总结词
设计简单可靠的输入输出接口
详细描述
在输入输出接口设计时,需要选择合适的接口类型和规格,同时需要考虑接口的耐用性和可维护性。 对于输入接口的设计,可以选择光耦隔离或继电器隔离等方式;对于输出接口的设计,可以选择PWM 或SSR等方式。
04
软件设计
控制程序流程设计
初始化程序
设置单片机和步进电机的参数,包括输入 输出端口、电机型号等。
VS
模糊控制算法
根据电机的实际运行状态和环境参数,对 PID控制算法进行优化,提高控制的稳定 性和适应性。
单片机与上位机通信
Modbus协议通信
采用Modbus协议实现单片机与上位机之 间的通信,上位机发送速度控制信号和电 机状态信息,单片机接收并处理。
串口通信
基于单片机控制的步进电机调速系统的设计

基于单片机控制的步进电机调速系统的设计步进电机是一种常用的电机类型,它通常用来实现精确定位和控制运动。
步进电机的控制需要一个精确的调速系统来确保稳定的运行和准确的位置控制。
本文将基于单片机控制的步进电机调速系统进行设计。
首先,我们需要选择合适的硬件以及编程平台。
本设计选择使用Arduino Uno作为单片机控制器,它具有易用性和强大的控制功能。
步进电机选择了NEMA 17型号,它具有较高的分辨率和扭矩输出。
接下来,进行电路设计与连接。
将步进电机的四个线圈连接到单片机的GPIO引脚上,并使用电流驱动模块控制电机的供电。
通过连接外部电源,电流驱动器将为步进电机提供稳定的电流,以确保电机能够正常工作。
在编程方面,首先需要编写初始化代码,配置单片机的GPIO引脚以及串口通信功能。
然后,可以使用Arduino提供的步进电机库来控制电机的旋转。
该库提供了简单的命令来控制步进电机的转动方向和转速。
为了设计调速系统,我们可以使用一个旋转编码器来实时监测电机的转速。
旋转编码器将会测量电机的转动次数,从而计算出电机的转速。
在单片机的程序中,我们可以设置一个目标转速,并根据旋转编码器的数据来调整电机的驱动频率。
为了实现平滑的调速过程,我们可以使用PID控制算法来调整电机的驱动频率。
PID控制算法是一种经典的反馈控制算法,它可以根据目标值和实际值之间的差异来调整控制信号。
通过不断地比较电机的实际速度与目标速度,PID控制算法可以动态地调整电机的驱动频率,以达到稳定的调速效果。
最后,我们可以设计一个用户界面来设置目标速度和监控电机的运行状态。
通过串口通信功能,单片机可以与上位机进行数据交互,用户可以通过上位机发送指令来设置目标速度,并且可以实时监测电机的转速和运行状态。
总结起来,基于单片机控制的步进电机调速系统设计需要进行硬件选择与连接、软件编程以及用户界面设计。
通过合理地选择硬件和软件方案,以及使用PID控制算法,我们可以实现一个稳定且准确的步进电机调速系统。
单片机控制的小扭矩步进电机调速
单片机控制的小扭矩步进电机调速摘要本文介绍了单片机控制小扭矩步进电机调速的原理和实现方法。
通过对步进电机的工作原理和调速方法进行详细介绍,结合单片机的控制能力,设计并实现了一个简单的步进电机调速系统。
本文还分析了步进电机调速的应用场景和未来发展方向。
1. 引言小扭矩步进电机是一种常用于精密控制和定位应用的电机,具有高精度、低噪音、低能耗等优点。
为了实现步进电机的调速,一般采用单片机作为控制器。
单片机具有高性能、低成本、易编程等特点,能够实时控制步进电机的运行状态和速度。
因此,单片机控制的小扭矩步进电机调速具有广泛的应用前景。
2. 步进电机的工作原理步进电机是一种根据输入的脉冲信号进行运动的电机。
其核心部件是转子和定子,通过施加脉冲信号使得转子按照一定的步进角度运动。
步进电机是一种开环控制系统,可以精确控制位置和速度。
步进电机有两种常见的工作方式:单相和双相。
单相步进电机只需提供一个相位脉冲信号,而双相步进电机则需要两个相位脉冲信号。
根据脉冲信号的频率和方向,步进电机可以实现正转、反转、加速和减速等运动。
3. 步进电机调速原理和方法步进电机的调速方法可以通过控制脉冲信号的频率和步进角度来实现。
常见的调速方法有以下几种:3.1 定频控制定频控制是最简单的步进电机调速方法,即通过固定的频率和步进角度来控制电机的转速。
这种方法控制简单,但不能实现精确的速度调节。
3.2 脉冲数控制脉冲数控制是根据脉冲信号的数量来控制电机的转速。
通过改变脉冲信号的数量,能够实现精确的速度调节。
3.3 电流控制电流控制是根据电机的载荷情况来调节电机的转速。
通过改变电流大小,能够实现对电机的动力调节。
3.4 环形控制环形控制是通过控制脉冲信号的频率和周期来实现电机的调速。
通过改变脉冲信号的频率和周期,能够实现电机的高速和低速运动。
4. 单片机控制步进电机调速系统设计基于以上步进电机调速原理和方法,设计一个简单的单片机控制步进电机调速系统如下:4.1 系统硬件设计系统硬件设计主要包括步进电机、单片机、电源和驱动电路。
基于单片机的步进电机加减速的控制方法
( 9)
x=216- Tk/2
( 10)
则定时器的重装值用 C 语言实现如下
TH=x\256
/* 定时器高 8 位赋值 */
( 11)
TL=x%256 /* 定时器低 8 位赋值 */
( 12)
以上定时时间是按照单片机定时器中断一次发一个
脉冲计算的, 如果是按照定时器中断两次发一个完整
脉冲计算, 则定时时间应为式( 8) 的一半。
— 125 —
5 实验
5.1 硬件线路图
作者在本文中, 使用 ATMEL89C52 单片机产生脉
冲及对方向进行控制; 使用 ZD- HB5034V 步进驱动器驱动
五相混合式步进电机 60BYG550A, 硬件线路图如下
AT8 9C 52
P1 .0 P1 .1 P1 .2 GN D
ZD-HB5 03 4V A
CP
B
将加减速曲线离散化, 离散化以后速度是分档上升的,
而且每升一档都要在该档( 台阶) 上保持一段时间, 保
持这个速度稳定运行几个脉冲后才再升一级, 这就克
服了步进电机转子的转动惯量所引起的速度滞后, 实
际上这也是局部速度误差的自动纠正。
由式( 1) 可知加速算法为
fr=f0+atr
( 2)
实 际 控 制 系 统 中 , 当 最 高 运 行 频 率 为 fh 时 , 由 ( 2)
C W/CCW
C
0 .72/0.3 6 D
G ND
E
A¢ £ ¤ ¥ E¢ £ ¤ ¥
...
60 BY G550 A¢ £ ¤
¡
图 3 步进电机控制硬件框图
5.2 软件设计 软 件 采 用 C 语 言 的 C51[4]编 写 , 主 要 由 主 函 数 、加
基于单片机控制的步进电机调速系统的设计-毕业论文-精品

基于单片机控制的步进电机调速系统的设计-毕业论文-精品2020-12-12学生姓名学号所在学院自动化与电气工程学院专业自动化课题基于单片机控制的步进电机调速系统的设计指导老师【关键字】方案、目录、情况、道路、方法、动力、进展、成就、空间、领域、模式、监测、运行、传统、难点、系统、有效、大力、继续、整体、现代、合理、良好、文明、健康、配合、执行、保持、统一、发展、发现、掌握、研究、措施、特点、位置、关键、稳定、网络、理想、地位、基础、需要、环境、工程、能力、需求、主导、方式、差距、作用、标准、结构、任务、速度、设置、增强、分析、简化、调节、形成、保护、满足、严格、管理、保证、指导、帮助、支持、教育、解决、调整、完善、取决于、方向、改革、实现、提高、改进、衷心、核心、用心基于单片机控制的步进电机调速系统的设计摘要步进电机是一种利用电脉冲进行控制且将电脉冲信号转换成相位移的电机。
每次给步进电机一个脉冲就转动一个固定的角度,这样就可以通过控制步进电机的两个相邻脉冲的时间间隔来改变脉冲的频率,通过延时的长短来控制步进角从而改变电机的转速,这样就实现了步进电机的调速系统。
论文主要研究内容如下:(1)本次研究的单片机型号是基于STC89C52的,认真的分析STC89C52的各个参数和引脚功能,在熟悉STC89C52单片机及其外围电路的基础上,选择常见且价格合理的外围硬件,使用protel99 se绘制各模块电路图以及系统整体电路图,利用洞洞板焊接基于单片机的实物。
(2)根据硬件电路绘制子模块的程序流程图,使用Keil uVision4编写程序实现各个软件模块,完成软件设计。
软件设计的主要难点是步进电机的正反转和速度的调节,其中步进电机的速度以软件延时的时间长短来调节。
程序编写完后使用Keil uVision4调试,直至没有错误,最后烧入单片机,检查其各个功能运行的实际效果,反复改写并调试程序直至满足既定的效果。
基于51单片机三相步进电机调速系统

基于51单片机三相步进电机调速系统学校:南京理工大学专业:机电一体化技术姓名:***班级:电气123学号:*********摘要步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速,停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累计误差等特点,使得它在位置,速度等控制领域显得非常简单。
步进电机的调速一般是改变输入步进电机的脉冲频率来实现调速的,步进电机每给一个脉冲就转动一个固定角度,这样就可以通过控制步进电机的脉冲到下一个脉冲的时间间隔来改变脉冲的频率,延时的长短来具体控制步进角来改变转速,从而实现调速功能。
一. 步进电机1.1步进电机的工作原理本论文我们采用的电机是三相步进电机,其主要应用于完成调速功能。
步进电机是一种用电脉冲进行控制,将电脉冲信号转换成相位移的电机,其机械位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成正比,每一个脉冲信号可以使步进电机旋转一个固定角度,脉冲的数量决定了旋转的总角度,脉冲的频率决定了电机运转的速度,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,他的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率来控制电动机的速度和加速度,从而达到调速的目的。
1.2 步进电机的特点1·一般步进电机的精度为步进角的百分之三到百分之五;2·步进电机外表允许的温度高,电机外表允许的最高温度应取决于不同的电机磁性材料的退磁点,一般的磁性材料的退磁点都在摄氏130度以上,所以步进电机的外表温度在摄氏80度到90度下完全正常。
3·步进电机的力矩会随转速的升高而下降。
二单片机的选择本次设计以AT89C51作为步进电机的控制芯片。
基于单片机的步进电机调速系统设计
基于单片机的步进电机调速系统设计摘要:随着科学技术水平的日益提高,生活水平的逐步提高,平稳,噪音低的步进电机逐步走进生活、学习和办公的各个领域。
这次步进电机调速系统的设计引进了加、减速和正、反转按键控制功能,同时也用数码管显示步进电机转速的7个不同的等级,用彩色二极管显示电机的正转,反转,停止和运行。
通过编写程序烧录到单片机然后给步进电机输入信号进而得以控制步进电机的速度和加速度,从而实现单片机对步进电机调速系统的控制。
关键词:步进电机;调速系统;单片机1引言当今社会各行各业的崛起、发展、繁荣都已经离不开电子电路,手机,电脑,电梯已经成为当今人类离不开的生活必须品,而电机是这些电子电气产品中不可或缺的器件,所以对电机的控制以及电机的精准运行显得尤为重要,本次设计将围绕电机的正转反转,转速等级,以及电机启动停止的控制展开系统的设计。
2设计思路这次步进电机调速系统设计整体可以划分为三个模块:单片机基本单元电路,外围电路和程序编写。
单片机系统的基本单元电路为晶振电路和复位电路,其中晶振电路由两个电容和一个晶振构成,在单片机基本单元电路中晶振电路中的两个电容原件有快速其中和稳定频率的作用;复位电路包含两种,其中一种为上电复位电路,另一种为按键与复位电路。
外围电路由三个模块构成,其中P0口接四个不同颜色的发光二极管实现停止、运行、正反转的显示;P2口接数码管,用来显示步进电机转速的不同等级;P3口分别接有四个不同功能的按键,为加速键,减速键,启动键和反转键;P1口通过74LS04反向器与达林顿管ULN2003相接从而启动步进电机的运行转动。
通过上网查阅资料,编写测试各个子程序块,然后连接组合整理成完整的运行程序,实现对步进电机调速的控制。
3硬件电路80C51单片机基本单元电路。
包含晶振电路和复位电路。
复位电路中当RST 引脚加高电平复位信号时,单片机内部就执行复位操作,当复位信号变为低电平时,单片机便开始执行程序。
单片机控制的小扭矩步进电机调速

要实现单片机控制的小扭矩步进电机调速,可以按照以下步骤进行:1. 选择步进电机和驱动器:根据需要调速的要求和扭矩需求,选择适合的小扭矩步进电机和相应的驱动器。
确保驱动器能够与单片机进行通信,并能提供足够的电流和精确的步进控制。
2. 连接电路:将步进电机与驱动器进行连接,包括电源、控制信号和电机线圈的连接。
确保连接正确并稳定。
3. 编程控制:使用单片机编写程序,控制步进电机的转速和方向。
可以通过控制驱动器发送给电机的脉冲信号的频率和脉冲数来实现调速。
频率和脉冲数的变化会影响步进电机的转速和步距,从而实现调速。
4. 设置加速度和减速度:为了平滑调速,可以在程序中设置加速度和减速度的参数。
通过逐渐增加或减小脉冲信号的频率,可以实现平稳的调速过程。
5. 反馈控制(可选):如果需要更精确的调速,可以添加反馈控制系统。
例如,可以使用光电传感器或编码器来检测电机的转速,并通过单片机对驱动器进行实时的调整和反馈控制。
6. 测试和优化:完成编程后,进行测试和优化。
通过改变程序中的参数,如脉冲频率、脉冲数和延时等,来调整电机的转速和步距,以满足实际需求。
在实施上述步骤时,需要注意以下几点:-确保电源稳定可靠,能够提供足够的电流和电压给步进电机和驱动器。
-注意步进电机的最大允许电流,不要超过其额定值,以避免过热和损坏。
-需要根据具体步进电机和驱动器的规格书和技术资料,了解其控制信号的特性和工作方式,确保正确配置和连接。
以上是基本的步骤和注意事项,具体实现会因具体的电机和单片机而有所差异。
根据实际情况,可以参考相应的电机和驱动器的说明文档、单片机编程手册以及相关的控制原理和技术资料,进行详细的设计和实现。
基于单片机的步进电机调速电路设计
摘要步进电机又称脉冲电动机,是数字控制系统中的一种执行元件。
其功能是将脉冲电信号变换为相应的角位移或直线位移,且其输出转角、转速与输入脉冲个数、频率有着严格的同步关系。
步进电机由于其本身的特点,在具体的应用中有利于装置或设备的小型化和降低成本。
因而,广泛地应用在众多的领域中并得以不断的发展。
本设计采用8位单片机AT89S52对步进电机进行控制,通过I/O口输出的具有时序的方波作为步进电机的控制信号,信号经过驱动芯片驱动步进电机;同时,用4个按键来对电机的状态进行控制,并用数码管显示电机的转速。
关键词步进电机单片机驱动速度控制ITHE DESIGN OF SPEED GOVERNING CIRCUIT FOR STEPPER MOTOR BASED ON MCUABSTRACTKnown as a pulse motor, Stepper motor is an implementation component in the digital control system. Its function is converted into a pulse signal corresponding to the angular displacement or linear displacement, and the output angle, speed and the number of the input pulses, the frequency has a strict synchronization relationship. Because of Stepper motor’s own characteristics, the specific applicatio n in favor of apparatus or equipment turn into miniaturization and make its cost into reduction. Therefore, it was widely used in many areas and developed continuously. This design uses 8-bit MCU AT89S52 to control stepper motor, with the output of timing the square wave through I/O port as stepper motor control signals, and the signal driver stepper motor through the driver chip; same time, to control the state of the motor with four keys and display the motor speed on LED indicator.KEY WORDS Stepper Motors MCU Drive Speed Governing目录中文摘要 (I)英文摘要......................................................................................................... I I 1 绪论.. (1)1.1 步进电机及其发展 (1)1.2 步进电机在我国的发展应用及前景 (1)1.3 本文研究内容 (3)2 步进电机的结构、工作原理及特性 (4)2.1 步进电机的概念 (4)2.2 步进电机的结构及工作原理 (4)2.2.1 步进电机的结构 (4)2.2.2 工作原理 (4)2.3 步进电机的特点 (6)2.4 步进电机的常用术语 (7)2.5 步进电机的振荡和失步 (8)2.5.1 振荡 (8)2.5.2 失步 (9)2.6 阻尼方法 (9)3 总体硬件设计 (11)3.1 控制系统框图 (11)3.2 单片机最小系统 (11)3.2.1 时钟电路 (12)3.2.2 复位电路 (13)3.3 显示电路 (14)3.4 按键控制电路 (15)3.5 步进电机驱动电路 (16)4 步进电机的单片机控制原理 (18)4.1 单片机控制系统流程图 (18)4.2 脉冲序列 (18)4.2.1 脉冲序列的生成 (18)4.2.2 脉冲序列的分配 (19)4.3 步进电机的运行控制 (20)4.3.1 步进电机的速度控制 (20)4.3.2 步进电机的方向控制 (21)4.3.3 步进电机的位置控制 (22)4.3.4 步进电机的加减速控制 (22)5 程序设计 (28)5.1 主程序设计 (28)5.2 定时中断设计 (30)5.3 外部中断设计 (31)6 结论 (32)致谢 (33)参考文献 (34)附录 (36)1 绪论1.1 步进电机及其发展步进电机是机电一体化产品中的关键组件之一,是一种性能良好的数字执行元件,随着计算机应用技术、电子技术和自动控制技术在国民经济各个领域中的普及与深入,步进电机的需求量越来越大。
单片机控制的步进电机自适应调速方法

单片机控制的步进电机自适应调速方法孙 侃(广东中山大松通用机电有限公司技术开发部,528437)摘 要 介绍了步进电机速度自适应控制实现的机理,步进电机分段变速控制中频率运行代码、与频率运行代码相对应的最高运行频率、最小运行步长三者的对应关系,最后介绍了程序设计方法。
这种由单片机实现的步进电机自适应调速方法已得到实际应用,取得了较满意的结果。
关键词 步进电机 单片机 自适应调速 变频信号源 步进电机的变速控制———自动加/减速控制,是步进电机的基本变速方式,常用于位置控制场合。
在这种场合,要求步进电机对运动对象进行步长长度不等的实时位置控制,通常步长的变化范围还很大,如何利用这个基本变速方式进行有效的不失步控制,以满足控制的“快而不失步”的实际需要,是步进电机开环控制的中心问题。
对步长较大的定位控制,可以使步进电机总是以等高、等腰梯形的升降频曲线轨迹来运行,梯形曲线的高度就是步进电机恒频段的最高运行频率,它与步长无关;而当步长较小时,这个恒频段最高运行频率与步长大小是否也没有关系呢?本文就这个问题,对步进电机在步长较大和较小的位置控制中,如何实现位置的速度自适应控制进行讨论。
11 步进电机控制系统步进电机控制系统如图1所示。
变频信号源是一个脉冲频率由几赫到几千赫可连续变化的信号发生器,它为脉冲分配器提供脉冲序列。
脉冲分配器则根据方向控制信号把脉冲信号按一定的逻辑关系加到脉冲驱动放大器上进行放大,以驱动步进电机的转动。
因此变频信号源产生的脉冲序列是步进电机控制的基础。
本文要阐述的就是由单片机系统实现的变频信号源产生的脉冲序列如何满足步进电机速度自适应控制的思路和方法。
图1 步进电机控制图21 步进电机速度自适应控制实现的机理我们知道步进电机的转速可用下式表示(以反应式步进电机、负载不变的情形为例):n=60fZN (r/min)式中f为控制脉冲的频率,Z为转子齿数,N 为运行拍数。
由上式可见步进电机转速取决于脉冲频率、转子齿数和拍数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机控制的步进电机自适应调速方法孙 侃(广东中山大松通用机电有限公司技术开发部,528437)摘 要 介绍了步进电机速度自适应控制实现的机理,步进电机分段变速控制中频率运行代码、与频率运行代码相对应的最高运行频率、最小运行步长三者的对应关系,最后介绍了程序设计方法。
这种由单片机实现的步进电机自适应调速方法已得到实际应用,取得了较满意的结果。
关键词 步进电机 单片机 自适应调速 变频信号源 步进电机的变速控制———自动加/减速控制,是步进电机的基本变速方式,常用于位置控制场合。
在这种场合,要求步进电机对运动对象进行步长长度不等的实时位置控制,通常步长的变化范围还很大,如何利用这个基本变速方式进行有效的不失步控制,以满足控制的“快而不失步”的实际需要,是步进电机开环控制的中心问题。
对步长较大的定位控制,可以使步进电机总是以等高、等腰梯形的升降频曲线轨迹来运行,梯形曲线的高度就是步进电机恒频段的最高运行频率,它与步长无关;而当步长较小时,这个恒频段最高运行频率与步长大小是否也没有关系呢?本文就这个问题,对步进电机在步长较大和较小的位置控制中,如何实现位置的速度自适应控制进行讨论。
11 步进电机控制系统步进电机控制系统如图1所示。
变频信号源是一个脉冲频率由几赫到几千赫可连续变化的信号发生器,它为脉冲分配器提供脉冲序列。
脉冲分配器则根据方向控制信号把脉冲信号按一定的逻辑关系加到脉冲驱动放大器上进行放大,以驱动步进电机的转动。
因此变频信号源产生的脉冲序列是步进电机控制的基础。
本文要阐述的就是由单片机系统实现的变频信号源产生的脉冲序列如何满足步进电机速度自适应控制的思路和方法。
图1 步进电机控制图21 步进电机速度自适应控制实现的机理我们知道步进电机的转速可用下式表示(以反应式步进电机、负载不变的情形为例):n=60fZN (r/min)式中f为控制脉冲的频率,Z为转子齿数,N 为运行拍数。
由上式可见步进电机转速取决于脉冲频率、转子齿数和拍数。
当转子齿数一定时,转子旋转速度与输入脉冲频率成正比。
在负载能力范围内,这些关系不因电源电压、负载大小、环境条件的波动而变化,仅与脉冲频率有关。
它每转一周都有固定的步数,在不丢步的情况下运行,其步距误差不会积累,且改变脉冲频率就可以改变转速,故可进行调速,调速范围很宽。
在实际的步进电机位置控制中,也不可避免地遇到调速问题。
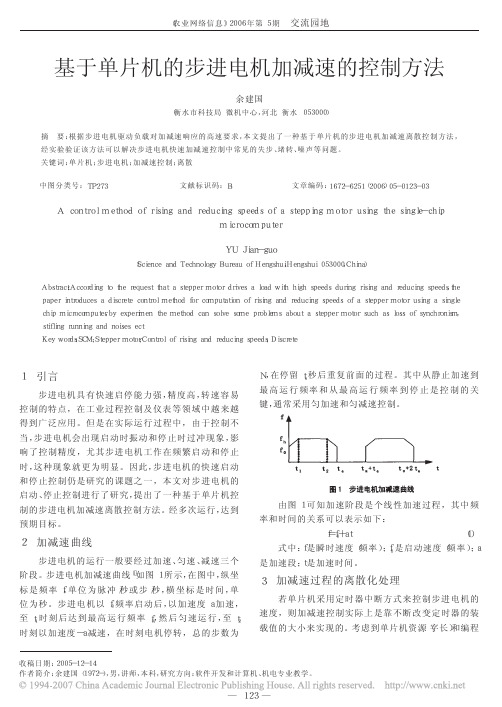
为了使步进电机在运行中不出现失步现象,一般要求其最高运行频率应小于(或等于)步进电机响应频率f s,在该频率下,步进电机可以任意起动、停止或反转而不发生失步现象,并且在控制中常采用如图2所示的梯形图式的升降频变速控制方式,即先低速启动,高速运转,然后降低速度,最后停止。
因此在步进电机的位置控制中,存在着两类不同的情形,一类是:当步进电机要行走的步长较长时,由于行走的距离长,可以让其运行在很高的频率上,甚至可以运行在最高响应频率f s 处,在梯形图上表现为以f s为高度的梯形曲线,也就是在大距离的位置控制时,步进电机可以而且最好是运行于最高响应频率f s处,并不受步长的制约。
另一类情形就不同了,当步进电机运行的步长小到某一步长L s 后,由于走过的距离短,如果仍然以不变的最高响应频率运行,显然步进电机在运行中就会失步,这是不能允许的,必须加以避免,折衷的办法只能是让步进电机降低频率运行,这个频率本文且记为f si。
毫无疑问,这个f si 是随着步长的不同而不同的,并且f si正比于步长,步长大时,f si就大,步长小时f si就小。
因此在步长变得较小后,在步进电机的梯形曲线图上必然存在着一个个高度不等的升降频曲线。
如果根据实际的控制需要,按照步长分段选择一些必要的升降频率曲线,控制时随着不同的行走步长自动地选择合适的曲线来运行,便可解决快速而不失步的矛盾了。
因此,由这些高度不等的升降频曲线,我们自然就引出了“步进电机分段变速控制”的方法。
为了很好地说明这种方法,还须引进“最小步长”和“频率运行代码”的概念。
最小步长———在步长较小时,若选定某一最高运行频率f si,在这个f si下步进电机不失步所能行走的最小距离(步长)。
频率运行代码———选定某-f si,对应于这个最高运行频率,步进电机在升频或降频时所能行走的升频或降频的步长,即图3中的L1和L3。
有了这些概念我们就可以说明步进电机分段变速控制了。
31 步进电机分段变速控制设某一台步进电机(型号:110B YG201)最高起跳频率为1000Hz,最高运行频率为10000Hz,从起跳频率开始若每隔Δf=1000Hz分一个速度段,则可分成10个速度段进行控制,各段就有一个相对应的最小步长,根据这个最小步长确定出相应的且能反映升频过程的频率运行代码。
进行分段变速控制的频率运行代码及与频率运行代码相对应的最高运行频率f si、最小运行步长如表1所示。
图2 分段变速控制图表1 速段代码表速 段0123456789频率运行代码08162734435260757D7F频率f si(Hz)100020003000400050006000700080009000100000最小运行步长(脉冲数)110374660924121015441852231024882574表1中,每一个速段都隐含有一个对应于最小步长的升降频运行曲线,实际上已建立了一个分段变速控制的模型。
若已知步进电机的运行步长,如何根据上表的最小步长值,确定步进电机应运行在哪一个速段下的升降频曲线呢?很显然,已知运行步长,可查这张表迅速决定要运行的速段。
例如,已知运行步长为1000,查表立即可知,步进电机若不失步,运行在最小步长为924的速段是最合适的;如果选择最小步长为660的速段,虽然步进电机运行不会失步,但运行速度却偏低;如果选择最小步长为1210的较高速段,因该速段要求至少运行1210步长才不至失步,显然,运行仅仅1000的步长却选择高一档的速段,步进电机就会失步。
因此设计时,首先根据步进电机的运行特性确定出表1,然后就可进行程序的设计了。
41 程序设计在设计中频率运行代码值取代表升频过程的步长L 1,也是程序中频率阶梯计数器中的阶梯计数值,见图3。
为简化程序设计,通常设定降频过程的步长L 3=L 1;因此各段的恒频段的步长,也就是步进电机各段恒频运行于最高运行频率f si (i =1,2,…,ξ。
ξ表示全过程分为ξ段)处的步长:L 2=L si (总步长)-L 1-L 3=L si -2L1图3 步进电机变速控制过程假定在每个阶梯步长,步进电机以恒频率行走λ步,因升频过程共有“频率运行代码”个阶梯步长,则升频过程共走“λ×频率运行代码”步,在降频过程中步进电机亦走“λ×频率运行代码”,因此恒频段的步长为:L 2=L -2L 1=L -2λ×频率运行代码这样利用实际须运行的步长求出相关的最小步长这个参数,再根据这个最小步长就可找出相应的频率运行代码,就完全可以使步进电机在程序的控制下根据实际要求的运行步长自动选择合适的升降频曲线(通过查另一张运转代码表)来运行,实现了步进电机在定位控制全过程中的速度自适应控制。
到此,我们也可以看出,步进电机是一种输出与输入数字脉冲对应的增量驱动元件,当它用于位置控制时,完全可以做到不要速度环也不要位置环的开环控制,前提是须先合理分配好各分段变速控制的升降频曲线,以确保运行过程中不失步。
这样大大简化了控制系统的规模和硬件的复杂性,便于广泛应用。
升降频过程采用单片机定时器T 0延时,以图3的直线升降(频)方式设计程序。
程序的流程详见图4的主程序框图、图5的T 0中断服务子程序框图。
图4 主程序框图图5 T 0中断子程序框图交流变频器在浆纱生产线上的应用区家贤(粤江织造实业有限公司,广东南海市九江镇,528203)摘 要 针对纺织浆纱生产线中传统拖动方式的缺点,采用变频调速技术进行改造,取得了良好效果。
介绍了变频器的选用及主电路与控制电路的构成。
关键词 变频调速 浆纱 行程开关 滑差电动机11 概 述在纺织浆纱生产线中,白经轴架盘内一般放置有8~16个白经轴,其本身不存在传动装置,而是由中机即30kW滑差电动机拖动白经轴上的经纱线来传动。
白经轴轴端转动机械部分不是通过轴承而是通过行轴套拖动,这样的拖动方式不可避免地带来很多缺点:①由于中机电动机拖动负载大,电动机温升高,噪音大。
②经轴架与中机间经纱线的张力难于控制,造成张力不均匀。
③在上下两层经纱架上转换接缚纱线时要关掉中机电动机,造成色纱等损失,降低等级的情况随时会发生,严重地影响染纱质量。
为此,我们在白经轴架与中机之间安装一个经轴贮纱架,而白经轴的拖动改用一台212kW、940r/min 的三相电动机经由高效节能的变频器控制。
通过这样的改造,很好地解决了上述几种弊病,提高了生产效率和经济效益。
21 变频器的选用经轴拖动电动机的数据为:P=2.2kW, n=940r/min,I=5.69.6A,Δ/Y接法。
为此,变频调速器选用台达公司产品,其型号为VFD37A43A,适用功率为317kW,对于212kW电动机应有一定余量。
该型变频器由于采用IG B T功率器件,电压波动适应性强(比功率器件GTR要好得多),而且整台变频器为全密封结构,适合于纱尘和腐蚀性较大的浆染生产线,另外整机价格不算贵,比日本机便宜。
这是我们乐于使用它的原因。
31 变频调速柜内主电路和控制电路变频调速柜由变频器、三相空气漏电开关KG、继电器、开关、指示灯、电位器等组成,主电路如图1所示。
为便于操作,我们将控制电路设计成自动和手动两种控制方式。
具体控制电路如图2所示,其中XK1、XK2、XK3行程开关采用L X252511棒状行程开关,AN2为旋钮开关。
手动操作时,AN2的1、5旋合,L5手动操作指示灯亮。
此时由AN2的1、4断开自动操作方式。
当升降贮纱架平台降低到使XK1动作,则继电器J1动作,其触点断开变频调速器的调速电位器给定电源和前向指令,电 51 结束语本文叙述的方法在我公司产品包装机的“步进电机用于物料小剂量计量控制”的项目中得到了很好的实际应用,取得了较满意的结果。
主要参考文献[1]陈隆昌,陈莜艳1控制电机1西安电子科技大学出版社,1994(收稿日期:1998208212)Abstracts of Some Articles in This IssueApplication of S2C MC2b ased Argon Flow Control System in E lectric Medical Operator/X u Huaqi ng,Zhang Pei mi n// Elect ronics&A utomation.21999,28(1)121113High frequency Argon flow electric operator has an impor2 tant application in medical operation,and the control and ad2 justment of the Argon flow is the key technology.This article introduces the principle,structure and related electric circuits of the Argon flow control system.Under the environment of strong electromagnetic radiation interference,this system, which can adjust and control the Argon flow precisely at+/-0.2L/min,is a practical system.K eyw ords:high frequency electric operator,Argon flow, flow control,s2c microcomputerR eal2time Metering of Coal Consumption in Therm al Plant/ X u Qi ngli n,Du Youf u//Elect ronics&A utomation.21999, 28(1).21315To solve the metering problem of the coal consumption in the thermal plant,a calculation model is given in this article with an explanation of system hardware and software design. By using this model,the coal consumption of each furnace can be measured accurately,and the data acquisition and data base system are integrated to form a metering and monitoring system for each individual furnace.This system has been applied in several plants featuring with multi2functions.K eyw ords:thermal plant,coal consumption,real2time metering,data acquisitionData R e2structure&Memory T echnology of Digital Video Sig2 nal of LED Color Display/L i u Chuanqi ng et al//Elect ronics &A utomation.21999,28(1)121517Low display updating speed and less gray scale grades exist in L ED display.For this,data restructure of digital video sig2 nal is made according to its special structure,and special bit plane encoding memory and scanning technology are used to achieve stable and high speed display effect of animation.This paper details the configuring principle and its realization.The practice proves:all color L ED display with bit plane encoding technology results in good gray scale with stable image without flutter,and the circuit is easy and flexible.K eyw ords:data restructure,bit plane encoding,memory technology,gray scale display,L ED displayDevelopment of Im age C apturing with Digital Video Monitor2 ing System B ased on PCI Bus/Wen Yi ni ng,Zeng Zej un// Elect ronics&A utomation.21999,28(1)121821The real time true color video signal is often processed with digitizer in supervisory control,desktop video and all sorts of microcomputer image processing system.According to the features of the digital video monitoring system based on digital video decoder Bt848,the newest developed PCI local bus is used in image capturing.This paper describes the realization of the image capturing and video editing of the monitoring system based on PCI bus,PCI bus specification,principle of the digital video decoding and the development of user software.Besides, part of source program developed with VC++4.2is given.K eyw ords:PCI bus,monitoring system,image capturing, video editing,digital video decodingDesign and Analysis of A DC Du al2Output Adjustable Pow er Supply Featuring with H igh Q u ality and Simplicity/Zhou Kaiti n,Zheng L i xi n//Elect ronics&A utomation.21999,28 (1)122224Based on the necessary characteristics of a quality stabi2 lized voltage DC power supply,this article describes a dual2out2 put stabilized voltage DC supply consisted of PI regulator and common2emitter connected transistor featuring simplicity and high quality with characteristic analysis.A design example is given with max.Output current5A,Max.Output voltage 50V,voltage regulation rate0.012%,load regulation rate0. 04%,and ripple immunity ratio84dB.K eyw ords:DC stabilized voltage supply,common2emitter connected,PI regulator,ripple analysisR ecording the Operation Process in E lectricity N et w orks Con2 trol Operation by Using Windows Programming T echnology/ W ang Qiang∥Elect ronics&A utomation1-1999,28(1)12 30~31,36In developing the full2range simulator of the electricity networks control of the thermal power plant of Daqing Oil Field,by using WINDOWS programming technology,a pro2 gram of recording the operation process in electricity networks control operation is made,including the required functions and realization process of the program and man2machine interface organization,etc.The said program works well on the electricity networks control simulator.K eyw ords:WINDOWS programming technology,timer, structure,networks controlSelf2Ad apting Speed R egulation of Stepping Motor B ased on S2 C MC/S un Kan//Elect ronics&A utomation.21999,28(1) 123235This paper explains the principle of realization of eslf2 adapting speed regulation of stepping motor and the relationship among frequency run code of sectional speed control,max.Run frequency corresponding to frequency run code,and min.Run step length.The programming method is also given.This method of speed regulation is now put into operation and a sat2 isfactory result is gained.K eyw ords:stepping motor,s2c MC,self2adapting speed regulation,variable frequency signal source。