ABB PickMaster 5教程
ABB机器人操作手册(中文版)[5]
![ABB机器人操作手册(中文版)[5]](https://img.taocdn.com/s3/m/82e15674842458fb770bf78a6529647d27283421.png)
ABB机器人操作手册(中文版)ABB操作手册(中文版)概述采用模块化设计,可根据不同的需求和场合选择合适的机械臂、控制柜、控制器和软件。
采用IRC5控制系统,具有强大的计算能力、通信能力和扩展能力,支持多种编程语言和接口。
采用RobotStudio软件,可实现对的仿真、编程、调试和优化。
支持多种安全功能,如安全区域、安全速度、安全住手等,保障人员和设备的安全。
组成机械臂:是的执行部份,由多个关节和驱动器组成,可实现多自由度的运动。
控制柜:是的控制部份,包含了电源模块、CPU模块、I/O模块、驱动模块等,负责对进行控制和管理。
控制器:是的操作部份,是一种便携式的触摸屏设备,可通过有线或者无线方式与控制柜连接,用于对进行设置、操作和监控。
软件:是的程序部份,包括了运行在控制柜上的操作系统和应用程序,以及运行在PC上的仿真和编程软件。
操作本节介绍了如何对ABB进行基本的操作,包括了启动、住手、复位、手动操作、自动操作等。
启动机械臂处于空载状态,没有任何工具或者物品附着在末端执行器上。
机械臂周围没有任何障碍物或者危(wei)险物品。
控制柜已经连接好电源,并且电源开关处于关闭状态。
控制器已经连接好控制柜,并且电池电量充足。
PC已经连接好控制柜,并且安装好RobotStudio软件。
启动的步骤如下:1. 打开控制柜的电源开关,等待控制柜自检完成。
2. 打开控制器的电源开关,等待控制器启动完成。
3. 在控制器上选择“系统”菜单,并选择“启动”选项。
5. 等待系统提示“启动成功”,并显示主界面。
住手机械臂处于空载状态,没有任何工具或者物品附着在末端执行器上。
机械臂周围没有任何障碍物或者危(wei)险物品。
处于住手状态,没有任何运动或者动作。
住手的步骤如下:1. 在控制器上选择“系统”菜单,并选择“住手”选项。
3. 等待系统提示“住手成功”,并显示主界面。
4. 关闭控制器的电源开关。
5. 关闭控制柜的电源开关。
复位机械臂处于空载状态,没有任何工具或者物品附着在末端执行器上。
ABB机器人IRC 5 operation

ABB机器人IRC 5操作手册简介ABB机器人IRC 5是由ABB公司开发的工业机器人操作系统。
该系统以其高效性、可靠性和安全性被广泛用于制造业和其他工业领域。
本文档将提供如何对ABB机器人IRC 5进行操作的简要介绍。
环境准备在开始使用ABB机器人IRC 5进行操作之前,需要做以下准备:•了解机器人的类型以及他们可以完成的任务。
•操作系统能够正常运行,系统中没有任何中断或故障。
•安全措施得到了有效的采取,例如固定机器人,并提供安全防护。
•安装机器人操作程序。
操作步骤步骤1:连接到机器人•首先,要确保正确的连接了机器人。
建议使用网线连接到机器人。
•打开操作系统。
•打开ABB机器人IRC 5的控制台。
步骤2:创建程序•在控制台上单击“程序”选项卡。
•单击“新建”按钮创建新程序。
•输入程序名称。
•点击“创建”按钮。
•现在可以开始编写程序。
步骤3:编写程序•可以使用“命令”面板中的按钮添加动作和命令。
•每次更改程序后,都要保存并重复编辑程序以避免意外更改。
步骤4:运行程序•单击“F5”键来检查程序是否有语法错误。
•检查后,单击“上传”按钮上传程序到机器人上。
•上传完成后,单击“运行”按钮来运行程序。
操作技巧以下是一些操作ABB机器人IRC 5的技巧:1. 检查程序在运行程序之前,应该通过检查语法错误来避免潜在的问题。
2. 定义安全区域要保证机器人的安全,需要定义安全区域。
3. 添加注释通过添加注释可以增加程序的可读性和可维护性。
4. 可编辑性需要确保每次更改程序后,都要保存并重复编辑程序以避免意外更改。
使用ABB机器人IRC 5可以大大提高制造业和其他工业领域的效率和安全性。
在使用之前必须熟悉机器人的类型和任务,并确保正确连接到机器人。
通过遵循正确的操作步骤和技巧,使机器人的运行更加安全可靠。
ABB机器人手动操作
ABB手动操作ABB手动操作1:引言1.1 目的1.2 范围2:操作准备2.1 安全注意事项2.2 必备设备2.3 操作人员要求3:手动操作流程3.1 开启系统3.2 进入手动模式3.3 控制器界面介绍3.4 手动操作步骤3.4.1 启动3.4.2 选择操作模式3.4.3 手动示教模式3.4.4 手动运动控制3.4.5 结束操作4:手动操作常见问题解决办法4.1 无法启动4.2 手动示教模式无法进入4.3 手动运动控制异常4.4 其他常见问题及解决方法5:附件5.1 系统操作手册5.2 安全操作手册附录:1:法律名词及注释1.1 :指能够自动完成某些工作的机械设备或系统。
1.2 操作准备:指在进行手动操作前需要做的准备工作。
1.3 手动操作:指利用操纵杆、按钮等手动方式对进行控制和操作。
1.4 手动示教模式:指系统中的一种操作模式,允许用户通过手动示教完成程序编写和路径规划。
1.5 控制器界面:指控制系统的用户界面,用于设置和监控的运行状态。
1.6 手动运动控制:指在手动模式下对的运动轨迹进行控制和调整。
1.7 操作人员:指具备相关操作技能和知识的人员,有能力进行手动操作和故障排除。
本文档涉及附件:- 系统操作手册- 安全操作手册本文所涉及的法律名词及注释:1::指能够自动完成某些工作的机械设备或系统。
2:操作准备:指在进行手动操作前需要做的准备工作。
3:手动操作:指利用操纵杆、按钮等手动方式对进行控制和操作。
4:手动示教模式:指系统中的一种操作模式,允许用户通过手动示教完成程序编写和路径规划。
5:控制器界面:指控制系统的用户界面,用于设置和监控的运行状态。
6:手动运动控制:指在手动模式下对的运动轨迹进行控制和调整。
7:操作人员:指具备相关操作技能和知识的人员,有能力进行手动操作和故障排除。
ABB机器人操作手册(中文版)[2]
![ABB机器人操作手册(中文版)[2]](https://img.taocdn.com/s3/m/f73ec5c0fbb069dc5022aaea998fcc22bcd143db.png)
ABB机器人操作手册(中文版)MODULE ModuleNamePROC ProcedureNameStatement1;Statement2;...ENDPROC...ENDMODULE/ This is a single line comment/+ This is amulti-line comment +/num a := 10; / Assign 10 to variable aMoveL p1,v100,z10,tool0; / Assign parameters to MoveL instructionMoveL p1,v100,z10,tool0; / Move linearly to position p1 with velocity v100, zone z10 and tool tool0MoveJ p2,v50,fine,tool0; / Move joint to position p2 with velocity v50, zone fine and tool tool0MoveC p3,p4,v75,z5,tool0; / Move circularly from position p3 to position p4 with velocity v75, zone z5 and tool tool0 IF condition THEN / If condition is true, then execute statement1Statement1;ELSE / If condition is false, then execute statement2Statement2;ENDIFWHILE condition DO / While condition is true, repeat statementStatement;ENDWHILEFOR num i FROM 1 TO 10 DO / For i from 1 to 10, repeat statementStatement;ENDFORnum x := Sin(30); / Assign the sine of 30 degrees to variable xnum y := Add(10,20); / Assign the result of adding 10 and 20 to variable yABB操作手册(中文版)概述ABB是一种先进的工业,可以用于各种创造、物流、服务等领域的自动化应用。
ABB机器人基本操作说明

这里我添加了 一个指令进来
了
功能键及指令用法
回原点指令 (路径不可预测,机器人按
自己舒服的姿势动作
圆弧指令
直线指令
转轴指令(类似MOVEABSJ, 路径也是不可预测的
本窗口为非焊接状态下运转的常用指令
原点指令 圆弧指令 复位指令
跳转
程序调用指令 置位指令
本窗口为焊接的常用指令
圆弧起弧指令
圆弧收弧指令
14、谁要是自己还没有发展培养和教 育好, 他就不 能发展 培养和 教育别 人。20 21年6 月27 日星期 日2021 /6/27 2021/ 6/272 021/6/ 27
15、一年之计,莫如树谷;十年之计 ,莫如 树木; 终身之 计,莫 如树人 。202 1年6月 2021/6/272 021/6 /2720 21/6/ 276/2 7/202 1
12、要记住,你不仅是教课的教师, 也是学 生的教 育者, 生活的 导师和 道德的 引路人 。202 1/6/2 72021 /6/27 2021/ 6/27Su nday, June 27, 2021
13、He who seize the right moment, is the right man.谁把握机遇,谁就心想事成。20 21/6/27202 1/6/2 72021 /6/27 2021/ 6/276 /27/2 021
2、Our destiny offers not only the cup of despair, but the chalice of opportunity. (Richard Nixon, American President )命运给予我们的不是失望之酒,而是机会之杯。二〇二一年六月十七日2021年6月17日星期四 3、Patience is bitter, but its fruit is sweet. (Jean Jacques Rousseau , French thinker)忍耐是痛苦的,但它的果实是甜蜜的。10:516.17.202110:516.17.202110:5110:51:196.17.202110:516.17.2021 4、All that you do, do with your might; things done by halves are never done right. ----R.H. Stoddard, American poet做一切事都应尽力而为,半途而废永远不行6.17.20216.17.202110:5110:5110:51:1910:51:19 5、You have to believe in yourself. That's the secret of success. ----Charles Chaplin人必须相信自己,这是成功的秘诀。-Thursday, June 17, 2021June 21Thursday, June 17, 20216/17/2021
最新ABB机器人的手动操作
A B B机器人的手动操作ABB[a]/-J-3ABB机器人的手动操作3.1任务目标➢掌握手动操作机器人运动的三种模式。
➢使用“增量”模式来控制机器人的运动。
➢熟练使用手动操纵的快捷方式。
➢掌握ABB机器人转数计数器更新操作。
3.2任务描述手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。
如何使用这三种模式手动操作机器人运动是项目的主要内容。
建立一个工作站,ABB型号为IRB120,Y轴上建模长方体,长200mm,宽200mm,高400mm,在长方体的内角上进行重定位运动,之后恢复到机械远点。
(手动操作练习需要教师指导,同时需要上机练习)3.3知识储备3.3.1手动操作三种模式1.单轴运动一般地,ABB机器人是由六个伺服电动机分别驱动机器人的六个关节轴,那么每次手动操纵一个关节轴的运动,就称之为单轴运动。
图2 IRB 120机器人的关节轴2.线性运动机器人的线性运动是指安装在机器人第六轴法兰盘上工具的TCP在空间中作线性运动。
3.重定位运动机器人的重定位运动是指机器人第六轴法兰盘上的工具TCP点在空间中绕着坐标轴旋转的运动,也可以理解为机器人绕着工具TCP点作姿态调整的运动。
3.3.2RobotStudio中的建模功能当使用RobotStudio进行机器人的仿真验证时,如节拍、到达能力等,如果对周边模型要求不是非常细致的表述时,可以用简单的等同实际大小的基本模型进行代替,从而节约仿真验证的时间。
如果需要精细的3D模型,可以通过第三方的建模软件进行建模,并通过*.sat格式导入到RobotStudio中来完成建模布局的工作。
1.使用RobotStudio建模功能进行3D模型的创建1.单击“新建”菜单命令组,创建一个新的空工作站。
2.在“建模”功能选项卡中,单击“创建”组中的“固体”菜单,选择“矩形体”。
3.按照垛板的数据进行参数输入,长度1190mm,宽度800mm,高度140mm,然后单击“创建”。
ABB机器人 手动操作

ABB 手动操作本文档为ABB手动操作的详细指南,旨在提供给操作人员参考。
请按照以下章节中的步骤进行操作。
1:系统概述:1.1 概述在本章节中,将介绍ABB的基本信息,包括型号、技术参数以及适用范围等内容。
1.2 操作台概述本章节将介绍操作台的组成部分以及各个控制按钮的功能和使用方法。
同时也会提供相关的操作说明。
2:准备工作:2.1 操作前检查在本章节中,将详细介绍在开始操作之前需要进行的各项检查工作,包括系统状态检查、安全保护设施的检查等。
2.2 及工作场所准备本章节将介绍及其工作场所的准备工作,包括的安装、固定以及工作场所的环境准备等。
3:手动操作步骤:3.1 开机与关机在本章节中,将介绍的开机与关机方法,包括主电源开关和控制面板上的相应按钮操作步骤。
3.2 示教操作本章节将详细介绍手动示教操作的步骤,包括坐标示教、路径示教以及示教数据的保存方法等。
3.3 手动操作在本章节中,将介绍手动操作的方法,包括手动运动控制盒上的各个按钮功能以及操作步骤。
4:事故处理:4.1 事故原因分析在本章节中,将介绍手动操作过程中可能出现的事故原因以及常见的故障处理方法。
4.2 紧急停止本章节将介绍紧急停止的方法,包括紧急停止按钮的使用以及紧急停止后的恢复步骤。
5:附件:本文档涉及的附件包括:- ABB型号说明书- ABB手册- ABB手动操作视频教程6:法律名词及注释:- :指由电气、电子和机械等部件组成的能自动执行工作的操作设备。
- 示教:指通过人工操作将引导到特定的位置或路径,以记录运动轨迹和操作参数的过程。
- 紧急停止:指通过紧急停止按钮立即切断的动力源,以应对紧急情况。
ABB机器人地手动操作

ABB机器人地手动操作在工业自动化的时代,ABB机器人已经成为了自动化生产线的重要组成部分。
这些机器人经过编程和设置,可以高效地完成各种任务,从而提升生产效率和质量。
然而,对于初次接触ABB机器人的用户来说,可能会感到有些困惑,特别是如何进行手动操作。
本文将详细介绍ABB机器人的手动操作方法。
一、准备工作在进行任何手动操作之前,必须确保安全。
要阅读并理解ABB机器人的安全手册,了解操作过程中的安全规定和操作规程。
然后,根据操作规程,进行安全防护措施的设置,如设置安全门锁、急停按钮等。
二、进入手动模式在ABB机器人的操作面板上,可以选择手动模式。
这个模式允许用户通过手动操作机器人来测试机器人的运动和位置。
进入手动模式后,可以通过操作面板上的方向键或者摇杆来控制机器人的移动。
三、手动操作步骤1、打开机器人控制面板,找到手动控制界面。
2、选择要控制的机器人(如果有多个机器人),并进行安全门锁的设置。
3、通过操作面板的方向键或者摇杆,控制机器人的移动。
4、根据需要,调整机器人的速度和精度。
5、在手动模式下,可以进行各种测试和调试,如运动轨迹的调整、工具姿态的调整等。
6、在完成调试后,退出手动模式,将机器人恢复到自动模式。
四、注意事项1、在进行手动操作时,必须始终注意安全,遵循操作规程。
2、在手动模式下,机器人的运动速度可能会比自动模式慢,这是为了确保安全。
3、在手动操作过程中,如果遇到问题或者故障,应立即停止操作,并寻求专业人员的帮助。
4、在使用过程中,应定期对机器人进行检查和维护,确保其正常运行。
ABB机器人的手动操作需要一定的专业知识和技能,同时也需要高度的责任心和安全意识。
只有经过专业的培训和学习,才能更好地掌握ABB机器人的手动操作技巧和方法。
ABB机器人手动操作ABB机器人:手动操作的艺术在工业自动化的世界中,ABB机器人无疑是最为引人注目的存在。
作为全球领先的机器人技术提供商,ABB机器人在各种行业和领域中都得到了广泛的应用。
ABB机器人基本操作说明.ppt

5、You have to believe in yourself. That's the secret of success. ----Charles Chaplin人必须相信自己,这是成功的秘诀。-Wednesday, August 5, 2020August 20Wednesday, August 5, 20208/5/2020
4、All that you do, do with your might; things done by halves are never done right. ----R.H. Stoddard, American poet做一切事都应尽力而为,半途而废永远不行 8.5.20208.5.202011:0311:0311:03:1011:03:10
ABB机器人操作说明
目录
程序编写基本步骤 功能键及常用指令说明 程序调用操作
ห้องสมุดไป่ตู้
第1步
第2步
第3步
点击这里可创建模块
模块展开后,根据自己需要创建模 块
第4步
假设创建模块名为 XIAGONG
刚创建的模块 在这里
第5步
接下来,可看 到模块里面没 有程序,所以 要在这里创建
程序
第6步
点击进例行程序后,发现里 面没例行程序,所以我们要 点这里创建一个例行程序
准备工作。(注意不执行焊接)
ArcLStart p1, v100, seam1, weld1, z10, tool1;
焊接点
空走速 度
起弧收 弧参数
焊接参 数
转弯区 域尺寸
ArcLEnd、ArcCEnd 焊接直线或圆弧至焊道结束点, 并完成填弧坑等焊后工作 不管Zone参数指定的圆角是多少,目标点一定是个 fine点。
ABB机器人使用入门

3HAC027097-010 修订: H
11
© 版权所有 2004-2011 ABB。保留所有权利。
参考信息
参考文档 Product manual - IRC5 操作员手册 - 带 FlexPendant 的 IRC5 操作员手册 - RobotStudio Operating manual - Trouble shooting-IRC5 Technical reference manual - System parameters Application manual - MultiMove
• 更新了有关高级功能的信息。请参阅安装 RobotStudio 第 页 15。 • 更新了手动激活方式的 Web 链接。请参阅手动激活 第 页 16。 • 增添了将系统下载到控制器的步骤。请参阅使用 RobotStudio 创建系统 第
页 18。
与 RobotWare 5.13.02 版配套发布。 更新了有关 RobotWare 密钥出厂的信息。请参阅使用 RobotStudio 创建系统 第 页 18。
文档号 3HAC021313-001 3HAC16590-10 3HAC032104-010 3HAC020738-010 3HAC17076-001 3HAC0 -
A B C D
描述 用文档号 3HAC 021564-001 替换手册。 与 RobotWare 5.08 版配套发布。 已添加波兰语翻译。 RobotStudio Online 集成在 RobotStudio 中。标题已调整。 有关 RobotStudio 安装和许可授权的更新信息。 以有关安装 RobotStudio 的信息更新了所有系统的常用步骤 第 页 15一节。
ABB机器人操作
目录之五兆芳芳创作1培训手册介绍--------------------------------------------22系统平安与情况庇护--------------------------------------------33机械人综述---------------------------------------------54机械人示教--------------------------------------------125机械人启动--------------------------------------------256自动生产 --------------------------------------------277编程与测试--------------------------------------------328输入输出信号--------------------------------------------509系统备份与冷启动--------------------------------------------5210文件办理--------------------------------------------54❖在没有声明的情况下,文件中的信息会产生变更.上海ABB工程有限公司不合错误此承担责任.❖对文件中可能出现的错误,上海ABB工程有限公司不合错误此承担责任.❖对于使用此文件或此文件提及的软硬件所导致的部分或严重性错误, 上海ABB工程有限公司无论如何不合错误此承担责任.❖没有上海ABB工程有限公司书面允许,此文件的任何部分不得拷印或复制,并且其中内容也不克不及转于第三方和用作不法目的.不然将追究其法令责任.❖文件中如有不详尽处,参阅<< User Guide >>、<< Product Manual >>、<< RAPID Reference Manual >>.上海ABB工程有限公司ABB (Shanghai) Engineering Co. Ltd.第一章培训手册介绍•本手册主要介绍了ABB机械人的根本操纵与运行.•为了理解本手册内容,不要求具有任何机械人现场操纵经验.•本手册共分为十章,各章节辨别描述一个特此外任务任务和实现的办法.•各章节之间有一定联系.因此应该按他们在书中的顺序阅读.•借助本手册学习操纵机械人是我们的目的,但是仅仅阅读此手册也应该能帮忙你理解机械人的根本的操纵.•本手册依照机械人尺度的装置编写,实际操纵按照系统的配置会有差别.•本手册仅仅描述实现通常的任务作业的某一种办法,如果你是经验丰厚的用户,可能会有其他的办法.•其他的办法和更详细的信息请阅读下列机械人手册(英语版).《使用指南User’s Guide》与《产品手册Product Manual》.第二章系统平安及情况庇护系统平安:由于机械人系统庞杂并且危险性大,在练习期间,对机械人进行任何操纵都必须注意平安.无论什么时候进入机械人任务规模都可能导致严重的伤害,只有经过培训认证的人员才可以进入该区域.以下的平安守则必须遵守:万一产生火警,请使用二氧化碳灭火器.•急停开关(E-Stop)不允许被短接.•机械人处于自动模式时,任何人员都不允许进入其运动所及的区域.•在任何情况下,不要使用机械人原始启动盘,用复制盘.•机械人停机时,夹具上不该置物,必须空机.•机械人在产生意外或运行不正常等情况下,均可使用E-Stop 键,停止运行.•因为机械人在自动状态下,即便运行速度很是低,其动量仍很大,所以在进行编程、测试及维修等任务时,必须将机械人置于手动模式.•气路系统中的压力可达,任何相关查验都要切断气源.•在手动模式下调试机械人,如果不需要移动机械人时,必须实时释放使能器(Enable Device).•调试人员进入机械人任务区域时,必须随身携带示教器,以防他人误操纵.•在得到停电通知时,要预先关断机械人的主电源及气源.•突然停电后,要赶在来电之前预先封闭机械人的主电源开关,并实时取下夹具上的工件.•维修人员必须保管好机械人钥匙,严禁非授权人员在手动模式下进入机械人软件系统,随意翻阅或修改程序及参数.•平安事项在《用户指南User’s Guide》平安这一章节中有详细说明.现场作业产生的放弃物处理:现场办事产生的危险固体放弃物:废产业电池废电路板废润滑油废油脂粘油回丝或抹布废油桶损坏的零件包装资料现场作业产生的放弃物处理办法:•现场办事产生的损坏零件由我公司现场办事人员或客户修复后再使用.•废包装资料,我方现场办事人员建议客户交收受接管公司收受接管再利用.•现场办事产生的废产业电池和废电路板,由我公司现场办事人员带回后交还供给商,或由客户保管,在采办新电池时作为互换物.废润滑油、废润滑脂、废油桶、粘油废棉丝和抹布等,建议客户分类收集后交给专业公司处理.第三章机械人综述3.1 机械人系统:3.1.1机械人控制系统:S41994-1996生产的机械人S4C1997-1999生产的机械人S4Cplus2000年以后生产的机械人本体:IRB1400任务规模较小,最大承载5kg,经常使用于焊接与小规模搬运.IRB2400任务规模较小,最大承载16kg,经常使用于焊接、涂刷、搬运与切割.IRB4400任务规模较大,最大承载60kg,经常使用于搬运.IRB6400任务规模较大,最大承载200kg,经常使用于搬运与点焊.IRB6400RIRB6400升级版,1999年开始生产,2000年后全面替代IRB6400.IRB640任务规模较大,最大承载160kg,堆垛专用的四轴机械.IRB140任务规模很小,最大承载为5kg,经常使用于焊接.IRB840任务规模很大,最大承载1200kg,搬运专用龙门架机械人.IRB340最大承载为1kg,分拣专用机械人.型号:机械人常规型号:IRB1400IRB2400IRB4400IRB6400•IRB指ABB尺度机械人•第一位数(1,2,4,6)指机械人大小•第二位数(4)指机械人属于S4以后的系统.•无论何种型号机械人,都暗示机械人本体特性,适用于任何机械人控制系统.机械人铭牌与系统盘:机械人铭牌机械人系统盘标签机械人组成:3.2.1 机械手(Manipulator)•机械手是由六个转轴组成的空间六杆开链机构,理论上可达到运动规模内空间任何一点.•六个转轴均有AC伺服电机驱动,每个电机后均有编码器.•每个转轴均带有一个齿轮箱,机械手运动精度(综合)达正负至正负.•机械手带有手动松闸按钮,用于维修时使用.•机械手带有平衡气缸或弹簧.•机械手带有串口丈量板(SMB),丈量板带有六节可充电的镍铬电池,起保管数据作用.控制柜(Controller)3.2.2.1外不雅:Mains Switch:主电源开关Teach Pendant:示教器Operator’s Panel:操纵面板Disk drive:磁盘驱动器3.2.2.1控制系统:Robot computer board:机械人计较机板,控制运动与输入/输出通讯.Memory board:存贮板,增加额定的内存.Main computer board:主计较机板,含8M 内存,控制整个系统.Optional boards:选项板插槽.Communicationboards:通讯板,用于网络或现场总线通讯.3.2.2.2驱动系统:DC link:将三相交换电转换为三相直流电.Drive module :每个单元控制2-3根转轴的转距.3.2.2.3电源系统:Transformer:进电变压器.Supply unit:直流供电单元,整流输出电压及短路庇护.3.2.2.4其他主要部件:Lithium batteries:锂电池,存贮备用电源.Panel unit:系统平安面板单元,处理所有影响平安与操纵的信号.I/O units :输入/输出单元.软件(RobotWare):RobotWare是ABB提供的机械人系列应用软件的总称,RobotWare目前包含BaseWare, BaseWareOption, ProcessWare,DeskWare与FactoryWare五个系列.3.3.1S4系统机械人:•每台机械人均配有一张IRB盘、三张系统盘和若干张参数盘,其中IRB盘为每台机械人特有,其他盘片只要版底细同可以通用.•按照机械人任务性质,每台机械人可以另外增加应用软件选项盘.3.3.2S4C系统机械人:•每台机械人均配有一张Key盘与一套系统盘,Key盘为每台机械人特有,其他盘片只要版底细同均可以通用.•按照机械人任务性质,每台机械人可以另外增加应用软件选项盘.3.3.3S4Cplus系统机械人:•每台机械人均配有一张系统光盘与一张Key盘或一组密码,Key盘或密码为每台机械人特有,系统光盘只要版底细同可以通用.•系统光盘中包含机械人冷启动软件RobInstall与网络通讯软件FTP.3.3.4RobotStadio:•RobotStadio是ABB公司自行开发的机械人模拟软件,能在PC 机上模拟几近所有型号的ABB机械人几近所有的操纵.•通过对CAD图纸的转换,RobotStadio可以模拟机械人外围设备与夹具,能够用于配置机械人系统.• RobotStadio 还带有机械人与系统参数配置软件ConfigEdit 、离线编程软件ProgramMaker 与机械人冷启动软件RobInstall 等. • 部分ABB 机械人随机配备RobotStadioLite.• RobotStadioLite 装置后,需要申请密码方能使用.• 对PC 硬件配置的更改,都会造成原密码失效.手册:每台ABB 机械人都随机配备一套至少三本手册.• User’s Guide 用户手册,介绍如何操纵.• Product Manual 产品手册,介绍如何维修.• RAPID Reference 编程手册,介绍如何编程.第四章 机械人示教机械人示教单元:4.2操纵面板功效: 马达上电按钮(带显示灯):显示灯常亮,机械人已上电,待命状态.显示灯闪烁(1Hz),机械人未上电.显示灯短促闪烁(4Hz),机械人未同步.机械人急停按钮:操纵模式选择器(带钥匙):自动模式:用于正式生产,编辑程序功效被锁定.手动限速模式:<250mm/s用于机械人编程测试.手动全速模式:只允许专业人员在测试程序时使用.一般情况下,避免使用这种运动模式.(选配项)操纵面板 Operator ’s Panel 示教器Teach Pendant4.2.4机械人运行时间计时器:显示机械手马达上电,刹车释放的总时间.为机械人维修与调养提供数据.示教器功效:Emergency stop button(E-Stop):急停开关.Enabling device:使能器.Joystick:把持杆.Display:显示屏.窗口键:(Window keys)Jogging-把持窗口手动状态下,用来把持机械人.显示屏上显示机械人相对位置及当前座标系.Program-编程窗口手动状态下,用来编程与测试.所有编程任务都在编程窗口中完成.Input/Outputs-输入/输出窗口显示输入输出信号表与其数值.可手动给输出信号赋值.Misc.-其他窗口:包含系统参数、办事、生产以及文件办理窗口.导航键:(Navigation keys)List-切换键将光标在窗口的几个部分间切换.(通常由双实线分隔)Next Page-向下翻页键将光标向下快速移动.PreviousPage-向上翻页键将光标向上快速移动.Uparrows-光标上移键将光标向上单步移动.Downarrows-光标下移键将光标向下单步移动.Left arrows-光标左移键将光标向左单步移动.Right arrows-光标右移键将光标向左单步移动.运动控制键:(Motion keys)Motion Unit-运动单元切换键手动状态下,把持机械人本体与机械所控制的其他机械装置(外轴)之间的切换.Motion Type 1-运动模式切换键1直线运动与姿态运动切换键.直线运动是指机械人TCP沿座标系X、Y、Z轴标的目的作直线运动.姿态运动是指机械人TCP在座标系中X、Y、Z轴数值不变,只沿着X、Y、Z轴旋转,改动姿态.Motion Type 2-运动模式切换键2单轴运动选择键.•第一组:1、2、3轴•第二组:4、5、6轴Incremental-点动把持键启动或封闭点动把持功效,从而控制机器人手动运行时速度.其他键:(Other keys)Stop-停止键停止机械人程序运行.Contrast-光明键调节显示器对比度.Menu Keys-菜单键显示下拉式菜单(热键),共有五个菜单键,显示包含各类命令的菜单.Function keys-功效键直接选择功效(热键),共有五个功效键,直接选择各类命令.Delete-删除键删除显示屏所选数据,机械人操纵时,所要删除任何数据、文件、目录等,都用此键.Enter-回车键进入光标所示数据.键:(Programmable keys)P1-P5这五个自定义键的功效可由程序员自定义,每个键可以控制一个模拟输入信号或一个输出信号以及其端口.手动操纵机械人:4.4.1把持窗口切换:将机械人操纵模式选择器置于手动限速模式.切换至把持窗口.4.4.2运动控制键:4.4.2.1运动单元切换键:External Unit-外轴运动单元Robot-机械人•光标指向机械人,把持杆把持机械人本体运动.•光标指向外轴,把持杆把持外轴,一台机械人最多可控制六个外轴.4.4.2.2运动模式切换键:Linear-直线运动•机械人东西姿态不变,机械人TCP沿座标轴线性移动.•选择不合坐标系,机械人移动标的目的将改动.Reorientation-姿态运动•机械人TCP位置不变,机械人东西沿座标轴转动,改动姿态.Axes-单轴运动•Axes1,2,3-第一、二、三轴•Axes4,5,6-第四、五、六轴4.4.3座标系设定:4.4.3.1座标系种类:•World coordinates大地座标系•Base coordinates根本座标系•Tool coordinates东西座标系•Work object coordinates工件座标系4.4.3.2座标系选择:进入把持窗口后,使用光标移动键将光标移至选项Coord,此时显示器下端功效键上将显示World、Base、Tool、Wobj四种选项,按相应功效键选择座标系.4.4.3.3东西选择:进入把持窗口后,使用光标移动键将光标移至选项Tool,按回车键,此时显示器显示机械人系统内东西清单,使用光标移动键将光标移至相应的东西,通过功效键OK选择.4.4.3.4工件座标系选择:使用光标移动键将光标移至选项Wobj,按回车键,显示器显示工件座标系清单,将光标移至相应的工件座标系,通过功效键OK选择.只有机械人座标系Coord选择Wobj时,此项选择才起作用.4.4.4把持杆锁定选择:进入把持窗口后,使用光标移动键将光标移至选项Joystick lock,此时显示器下端功效键上将显示None与三种箭头共四种选项,按相应功效键选择锁定机械人把持杆前后、左右与旋转.4.4.5点动速度选择:使用光标移动键将光标移至选项Incremental,显示器下端功效键上显示None、Small、Medium、Large与User四种选项,按相应功效键选择相应速度.用点动把持键可以快速控制点动速度打开或封闭.当机械人处于点动状态时,每动一下摇杆,机械人移动一步,摇杆倾斜超出1秒钟后,机械人以每秒10步的速度连续移动,直到摇杆复位.•No(Normal)正常状态,连续移动.•Small小,每单元移动0.05mm或0.005度.•Medium中,每单元移动1mm或0.02度.•Large大,每单元移动5mm或0.2度.•User用户自定义点动速度.4.4.6机械人当前位置显示:进入把持窗口后,在显示屏右侧Robot pos会显示机械人当前位置.•当机械人运动模式为直线运动或姿态运动时,显示屏显示机械人当前X、Y、Z座标值与空间姿态值Q1、Q2、Q3、Q4.按照基座标系、机械人东西TCP或工件座标系的不合选择,数值会产生变更.•当机械人运动模式为单轴运动时,显示屏显示机械人当前每个轴的转角偏差.4.4.7使能器:•自动模式下,使能器无效.•手动模式下,使能器有三个位置.•起始为“0”,机械人电机不上电.•中间为“1”,机械人电性能上电.•最终为“0”,机械人电机不上电,必须回到起始状态才干再次使电机上电.4.4.8直线运动:运动方法设置:Base座标系的标的目的移动:4.4.8.2把持机械人沿Tool座标系的标的目的移动:4.4.8.3把持机械人沿Wobj座标系的标的目的移动:4.4.8.4把持机械人沿World座标系的标的目的移动:4.4.9姿态运动:运动方法设置:机械人将以如图所示方法绕选定东西的中心点(TCP)旋转.4.4.10单轴运动:4.4.11外轴运动:运动方法设置:进入把持窗口,按运动单元切换键至外轴运动,此时显示屏在功效键处显示所有可控制的外轴名称.按功效键选择要把持的外轴单元.如果系统有超出5个外轴,按回车键,功效键上可显示其他的外轴.一般情况下,外轴采取单轴运动方法.第五章机械人启动机械人开机(合上电源):合上电源前,必须仔细查抄,确认无人处于机械人周围的防护区内.合上主电源开关初始状态:5.2.1热启动:•机械人系统自动查抄机械人硬件,当查抄完成并且没有发明毛病,系统将在示教器上显示以上界面信息.•在自动模式下,生产窗口将在几秒钟后出现.•正常启动后,通常保持上次电源封闭时相同的状态.o程序指针位置保持不变.o全部数字输出都保持断电以前的值或置为系统参数中所指定的值.o正常情况下,开机后程序可以立刻运行.•机械人程序被正常运行后,机械人会慢慢地回到编程路径(有偏差),然后在程序的路径上持续.•运动设定和数据自动被设定到断电前相同的值.•机械人将持续对中断作出反响.•机械人在断电前激活的机械单元将在程序运行后自动被激活.•弧焊和点焊进程自动被重置.但是,如果程序正好执行到更改焊接数据的指令时,新数据将在接缝上过早被激活.5.2.2热启动限制:•全部文件和串行通道都被封闭(可由用户程序控制).•全部模拟输出都被置为0,软伺服设定置被置为缺省值(可由用户程序控制).•焊缝跟踪不克不及被重置.•不受机械人驱动的独立的轴不克不及被重置.•如果在中断例行程序或错误处理程序正在执行时产生断电,程序路径不克不及被重置.•如果在中央处理器(CPU)很是忙的时候产生断电,有可能由于系统无法正常关机而导致无法重新启动.在这种情况下机械人系统将显示毛病信息.5.2.3热启动毛病:•机械人启动时将对机械人功效进行普遍的查抄.如果产生错误,会在示教器上以一般文本信息格局进行陈述,并在机械人的事件记实中进行记实.•其实不是所有毛病信息都会使机械人无法运行,但任何毛病信息都暗示机械人系统存在问题,会影响正常使用或丧失部分功效.•欲了解详细信息,请参阅相关机械人手册.第六章自动生产启动程序:将机械人操纵模式选择器置于自动生产模式.按功效键OK进入生产窗口.6.1.2.1窗口题目(Window title):显示屏显示当前处在生产窗口,其内容不会变更,“Production Info”.6.1.2.2机械人速率(Robot velocity):显示屏显示机械人当前运行速度速率标的,其内容不会变更,“Speed:=”.6.1.2.3程序运行指针(Program pointer):•程序运行指针(简称PP)至关重要,它指示出一旦启动程序,程序将从哪里起执行.•如果程序需要重新初始化,必须将程序运行指针移至主程序第一行.在当前窗口--->菜单键Edit--->2 Start from Beginning--->OK确认6.1.2.4程序清单(Program list):显示屏显示机械人当前运行的程序清单,可读出行将运行的指令.6.1.2.5程序名称(Program name):显示屏显示机械人当前运行的程序名称.6.1.2.6运行模式(Running mode):显示屏显示机械人当前运行模式.如果需要更改,利用导航键中的List键切换到窗口的上半部,再将光标移至运行模式,此时在功效键上出现“Continuous”与“Cycle”选项,选择相应运行模式.•Continuous连续运行模式,当机械人执行完主程序最后一行后,自动再从第一行开始执行.•Cycle单循环运行模式,当机械人执行完主程序最后一行,自动停止.6.1.2.7程序运行状态(Program status):显示屏显示机械人当前运行状态.•Stopped机械人待命状态.•Running机械人正在运行程序.6.1.2.8运行速率调整(Adjusted velocity):显示屏显示机械人当前运行速率,以百分比暗示.机械人运行速度为程序定义的速度乘以相应的运行速率.如果需要更改,利用导航键中的List键切换到窗口的上半部,再将光标移至运行速率,此时功效键上出现“-%”、“+%”、“25%”与“100%”四个选项,通过功效键更改机械人运动速率,选择规模为1%-100%.•-%下降机械人运行速率.5%以下,每次下降1%;5%以上,每次下降5%.•+%增加机械人运行速率.5%以下,每次增加1%;5%以上,每次增加5%.•25%运行速率直接切换至25%.•100%运行速率直接切换至100%.6.1.3程序运行:在生产窗口,功效键上显示“Start”、“FWD”与“BWD”三种选项.按相应功效键启动机械人.•Start连续执行程序.•FWD单步正向执行程序.•BWD单步逆向执行程序.6.1.4停止程序运行:按下停止键即停止程序的运行.注意:正常情况下应该用这种办法停止机械人程序的运行,不要靠其他方法强行终止运行.6.2毛病信息:无论什么时候何种毛病,一旦产生,机械人系统会立即弹出毛病信息窗口.每个毛病信息都带有毛病代码,并提供复杂毛病原因,按下功效键OK,清除毛病信息;按下功效键Check,还能看到系统提供的排除该错误的办法和建议.Error code number毛病代码.Category of error毛病类別.Reason for error毛病产生的原因.Message log记实毛病产生的时间及复杂的原因.6.3紧急制动及紧急制动的复位:•当急停键有效后,电电机源被迅速切断而停止程序运行.•排除引起急停的因素后,在示教器上按OK键确认毛病信息,复位急停键偏重新按下MOTORS ON便可恢复系统.6.3关机:机械人所有的输出信号都会因关机而消失,夹具上的工件可能因此而掉下来.•首先停止程序的运行.•然后旋转主电源开关由1-0,切断380V电力.建议:除非停电不要关机,这样能包管后备电池的寿命.第七章编程与测试程序储存器( Program memory )的组成:•应用程序( Program )•系统模块( System modules )机械人程序储存器中,只允许存在一个主程序;所有例行程序与数据无论存在于哪个模块,全部被系统同享;所有例行程序与数据除特殊定义外,名称必须是唯一的.程序( Program )的组成:•主模块( Main module )o主程序( Main routine )o程序数据( Program data )o例行程序( Routines )•程序模块( Program modules )o程序数据( Program data )o例行程序( Routines )7.1.2系统模块( System modules )的组成:•系统数据( System data )•例行程序( Routines )所有ABB机械人都自带两个系统模块,USER模块与BASE模块,按照机械人应用不合,有些机械人会配备相应应用的系统模块.建议不要对任何自动生成的系统模块进行修改.编程窗口:.1菜单键File:1 Open…打开一个现有文件.(程序.prg或模块.mod)2 New…新建一个程序.3 Save program存储更改后的现有程序.4 Save program as…存储一个新程序.5 Print…打印程序,现已经不使用.6 Preferences…定义用户化指令集.7 Check program查验程序,光标会提示错误.8 Close在程序储存器中封闭程序.9 Save module存储更改后的现有模块.(只在Module窗口中存在)0 Save modul e as…存储一个新模块.(只在Module窗口中存在).2菜单键Edit:1 Cut剪切,可能会丢失指令或数据.2 Copy复制.3 Paste粘贴,将剪切或复制的指令或数据粘贴到相应位置.4 Go to Top将光标移至顶端.5 Go to Bottom将光标移至底端.6 Mark定义一块,涂黑部分.7 Change Selected修改指令中数据,可直接将光标移至相应位置按回车键.8 Show value输入数据,可直接将光标移至相应数据按回车键.9 Modpos修改机械人位置,功效键上有.。
工业机器人离线编程(ABB)5-5 创建工具
二、实践操作
1、设定工具的本地原点
• 设定UserTool法兰盘本地原点,右键单击UserTool选择“修改”→“设定 本地原点”,捕捉法兰盘中心作为本地原点的位置,方向设为(180,0,0), 然后单击“应用”,如图5-115~5-117所示。
二、实践操作
1、设定工具的本地原点
• 设定UserTool位置,右键单击UserTool,选择“位置”→“设定位置”, 位置设为(0,0,0),方向设为(0,0,0),然后单击“应用”,如图5118~5-120所示。
二、实践操作
1、设定工具的本地原点
• 通过“三个点”方式重置UserTool,将其法兰盘所在平面与XY平面重合, 如图5-105、5-106所示(第一个点及其坐标设置)。
二、实践操作
1、设定工具的本地原点
• 第二、三个点及其坐标设置,如图5-107、5-108所示,单击“应用”完成 放置,如图5-109所示。
二、实践操作
2、创建工具坐标系框架
• 沿Z轴正方向移动框架5mm,右键单击“框架1”,选择“设定位置”,位置 设为(0,0,5),方向设为(0,0,0),然后单击“应用”,如图5-127~5129所示。
二、实践操作
3、创建工具
• 在“建模”功能选项卡中,单击“创建工具”,选择使用已有部件: UserTool,框架选择选择:框架1,单击添加按钮,然后单击“应用”,如 图5-130~5-133所示。
二、实践操作
2、创建工具坐标系框架
• 单击“框架”,选择“创建框架”,捕捉UserTool末端圆心作为框架的位 置,方向设为(0,0,0),然后单击“创建”,如图5-121~5-123所示。
二、实践操作
2、创建工具坐标系框架
ABB机器人的手动操作
ABB[a]/-J-3ABB机器人得手动操作3、1任务目标>掌握手动操作机器人运动得三种模式。
>使用“增量”模式来控制机器人得运动。
>熟练使用手动操纵得快捷方式。
>掌握ABB机器人转数计数器更新操作。
3、2任务描述手动操纵机器人运动一共有三种模式:单轴运动、线性运动与重定位运动。
如何使用这三种模式手动操作机器人运动就是项目得主要内容。
建立一个工作站,A BB型号为IRB120,丫轴上建模长方体,长200mm,宽2 0 0mm,高40 0 m m,在长方体得内角上进行重定位运动,之后恢复到机械远点。
(手动操作练习需要教师指导,同时需要上机练习)3、3知识储备3、3、1手动操作三种模式1、单轴运动一般地,A BB机器人就是由六个伺服电动机分别驱动机器人得六个关节轴,那么每次手动操纵一个关节轴得运动,就称之为单轴运动。
Axis 4图2 I R B 120机器人得关节轴2、线性运动机器人得线性运动就是指安装在机器人第六轴法兰盘上工具得TCP在空间中作线性运动。
3、重定位运动机器人得重定位运动就是指机器人第六轴法兰盘上得工具TCP点在空间中绕着坐标轴旋转得运动,也可以理解为机器人绕着工具TC P点作姿态调整得运动。
3、3、2RobotStudi o中得建模功能当使用RobotSt ud io进行机器人得仿真验证时,如节拍、到达能力等,如果对周边模型要求不就是非常细致得表述时,可以用简单得等同实际大小得基本模型进行代替,从而节约仿真验证得时间。
如果需要精细得3 口模型,可以通过第三方得建模软件进行建模,并通过*、s a t格式导入到区。
5仇51 u dio中来完成建模布局得工作。
1、使用Robots t u di o建模功能进行3 D模型得创建3.按照垛板得数据进行参数输入, 长度 1190m m ,宽度 8 00m m , 高度1 4 0 mm ,然后单击“创 建〃。
2、对3D 模型进行相关设置可兀 旌洒“谟定本地原点遁, ►图形显示“, 移除口何量 已掘■U 可旅 卜 可由后感器检1.在刚创建得对象上单击 右键,在弹出得快捷菜单 中可以进行颜色、移动、 显示等相关得设国存为库文忤. 2.在对象设置完成后,单击“导出几何体〃,就可以将 对象进行保存。
ABB操作步骤00
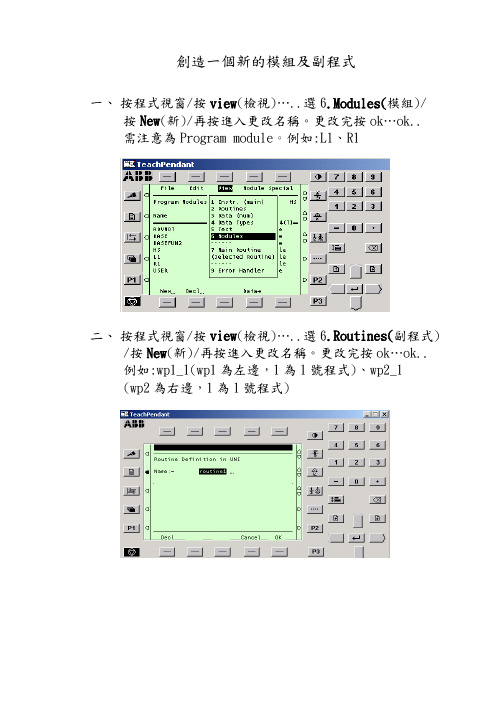
創造一個新的模組及副程式一、按程式視窗/按view(檢視)…..選6.Modules(模組)/按New(新)/再按進入更改名稱。
更改完按ok…ok..需注意為Program module。
例如:L1、R1二、按程式視窗/按view(檢視)…..選6.Routines(副程式) /按New(新)/再按進入更改名稱。
更改完按ok…ok..例如:wp1_1(wp1為左邊,1為1號程式)、wp2_1(wp2為右邊,1為1號程式)三、進入wp1_1副程式編輯程式A、先將噴漆設備打開Enableequip/按指令群IPL1選5.Motion&proc或IPL2/1Most commom1裡面有此指令,如果找不到請按0翻頁尋找。
B、選用10把刷子UseBrushTab/ 步驟同上C、編輯程式所要的路逕/用PaintL指令記憶點的位置PaintL * , v1000, z30, TCP\Wobj0=WobjAPaintL:為噴漆走直線指令。
*:為點的位置X、Y、Z可將游標移到此*再按編輯Edit/8、value改值。
v1000:速度1000mm/s,可按進入修改。
Z30:為精確度,可按進入修改。
TCP:為刀具中心點,定點繞軸之點。
WobjA:為工件座標。
四、增加開關槍位置A、將程式視窗切換至測試畫面(按右下角test)B、將速度放慢(按上下欄位切換)C、按start開始執行程式到所要之點、按程式停止鍵增加開關槍/按paint(噴漆功能)…./1.Add EventD、輸入所要之刷子號碼(1~10)、0號為關槍五、刷子測試A、按paint…/7、Enable Equipment.將噴漆設備打開。
B、按paint…/5、select Brushtable.使用10把刷子C、再按paint…/6、Brush Test.出現對話框、輸入所要測試之值D、Number:刷子號碼。
按Get給舊的參數。
Test為測試、ok儲存。
ABB机器人操作员使用手册
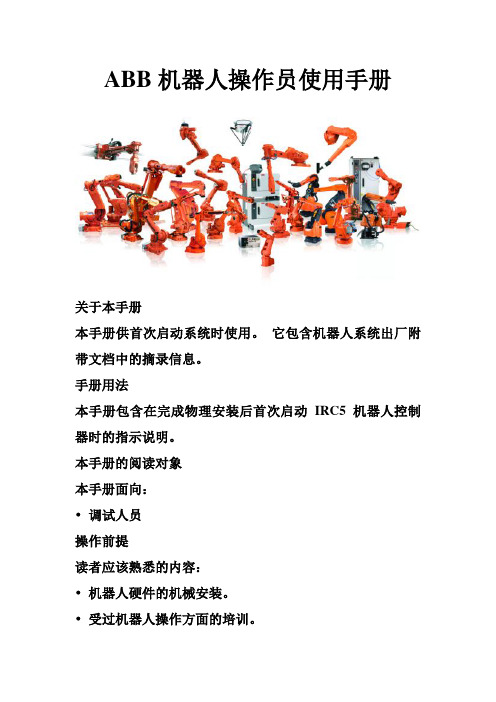
ABB机器人操作员使用手册关于本手册本手册供首次启动系统时使用。
它包含机器人系统出厂附带文档中的摘录信息。
手册用法本手册包含在完成物理安装后首次启动IRC5 机器人控制器时的指示说明。
本手册的阅读对象本手册面向:•调试人员操作前提读者应该熟悉的内容:•机器人硬件的机械安装。
•受过机器人操作方面的培训。
本手册内容假定所有硬件(操纵器、控制器等)均已正确安装并互相连接妥当。
本手册由以下各章组成:1操作步骤 设置和启动 IRC5 机器人系统的步骤。
2概述 介绍 IRC5 机器人系统中的部件。
一:安全1.1 安全术语安全信号简介:本节将明确说明执行此手册中描述的工作时,可能会出现的所有危险。
每种危险包括:• 标题,指明危险等级(危险、警告或小心)和危险类型。
• 简要描述,描述操作/维修人员未排除险情时会出现什么情况。
• 有关如何消除危险以简化工作执行的说明。
危险等级标志 名称含义危险 警告,如果不依照说明操作,就会发生事故,并导致严重或致命的人员伤害和/或严重的产品损坏。
该标志适用于以下险情:碰触高压电气装置、爆炸或火灾、有毒气体、压轧、撞击和从高处跌落等。
电击 针对可能会导致严重的人身伤害或死亡的电气危险的警告小心警告如果不依照说明操作,可能会发生能造成伤害和/或产品损坏的事故。
该标志适用于以下险情:灼伤、眼部伤害、皮肤伤害、听力损伤、挤压或滑倒、跌倒、撞击、高空坠落等。
此外,它还适用于某些涉及功能要求的警告消息,即在装配和移除设备过程中出现有可能损坏产品或引起产品故障的情况时,就会采用这一标志。
静电放电(ESD)针对可能会导致严重产品损坏的电气危险的警告注意 描述重要的事实和条件1.2 操纵器标签上的安全符号本节描述操纵器标签上使用的安全标志。
标志在标签上组合使用,描述每个具体的警告。
本节介绍的是常规内容,标签上可以包含附加信息(如,值)。
必须查看操纵器标签上的安全和健康标志,以及系统构建人员或集成人员提供的补充安全信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
© Robotics - 17
Simulate With Real Virtual Controller
Check cycle times Check boundaries
Visualization
© Robotics - 18
Collision avoidance
Built in automatic avoidance of work objects in the cell
Grippers included in configuration
© Robotics - 8
Define the product
Shapes
Physical dimensions of a box, bag, slip sheet, pallet et.c.
Item
Refers to an actual shape Max speed, acceleration, rotation Weight Facing
Standard software with full customer support
End customers performs production changes with standard software
© Robotics - 22
Lower the engineering cost
Specialized robot programming
Ease of use tool for robot integration
SI developing own semi standard software
Production changes needs reprogramming by SI
RS simulation
Stack height checking Collision avoidance Flow Backwards compatible
© Robotics - 13
Handled with care
Set maximum speed, acceleration and axis 4 rotation
ABB motion control for the highest speed performance
Early requests ensures highest possible robot utilization
Minimize wait time for boxes
Robot may start movement even before pick up target is confirmed
Open for third party palletizing pattern software Internal Library
Calculation of optimal robot motion
Approach angles Facings Multi pick/place for max throughput
Quality inspection
Bar code reading
© Robotics - 12
Loaded With Features
Individual speed and acceleration control of products Integrated tool configuration with activator zones Manually adjustments of individual pick & place operations Early request
Best fit to Station Logics PLC’s
Generic Station Signal Interface Request Status
I/O Communication configured for
Grippers Conveyors AGV´ s
Optimize your Production Line
Configure the whole layout of the palletizing cell
PickMaster 5 Line configuration Size and positions
In-feeders
Pallets
© Robotics - 21
Market trend
It used to be about……… Now it is………
Focus on hardware cost Maintaining high skilled programming competence at SI
Reduce programming cost SI focusing at developing smart solutions for end customers
Slip sheets et.c.
Supports 32 controllers
15 work areas per controller
© Robotics - 7
Easy to find optimum pattern
Integrated pallet pattern generator
When and how can it be ordered? How to get trained
© Robotics - 2
PickMaster- The ABB Packaging software
Packing Palletizing
Picking
© Robotics - 3
Line control
Possible to add safe points for the robot to pass through
Avoids collision with other fixed equipments
© Robotics - 19
Logical Flow Control
Improve system redundancy
Product in feed operated by line controller
Typically PLC
Not included in PickMaster 5
Products defined in line controller and PickMaster 5
PickMaster 5 requests products from line controller for palletizing operation Line controller acknowledge when ready
The configuration is linked to the actual product regardless what in-feed / out-feed it is using
Pick & place activation
Pick & place time பைடு நூலகம்dvanced motion control
Let the robot adapt to where you want to feed the products
Choose what in-feeds you want to use for what products on daily basis
Optimize robot utilization
No need for costly robot programming
PickMaster 5 creates all the robot moves from the PC configuration
© Robotics - 23
Untie your human resources
An Ease of Use software can be handled by a general competence
Transfer
Operation
© Robotics - 5
System configuration
Maximum, 1 robot per controller
32 controllers per PickMaster 5
4 and 6 axis robots
© Robotics - 6
Alternative infeeds can be configured for an out feed pallet
© Robotics - 10
Ease of Use Operation
Efficient operation from ABB’s graphical FlexPendant
Request by pre defined I/O signals
Projects started from GTPU
From PLC using I/O signal event handling
© Robotics - 4
PickMasterTM workflow
Offline Configuration